CN109587416B - 逐次逼近型模数转换器、成像设备、成像系统以及移动体 - Google Patents
逐次逼近型模数转换器、成像设备、成像系统以及移动体 Download PDFInfo
- Publication number
- CN109587416B CN109587416B CN201811143657.8A CN201811143657A CN109587416B CN 109587416 B CN109587416 B CN 109587416B CN 201811143657 A CN201811143657 A CN 201811143657A CN 109587416 B CN109587416 B CN 109587416B
- Authority
- CN
- China
- Prior art keywords
- signal
- digital
- analog
- pixel
- pixels
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/63—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/06—Continuously compensating for, or preventing, undesired influence of physical parameters
- H03M1/0602—Continuously compensating for, or preventing, undesired influence of physical parameters of deviations from the desired transfer characteristic
- H03M1/0604—Continuously compensating for, or preventing, undesired influence of physical parameters of deviations from the desired transfer characteristic at one point, i.e. by adjusting a single reference value, e.g. bias or gain error
- H03M1/0607—Offset or drift compensation
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/63—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current
- H04N25/633—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current by using optical black pixels
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/79—Arrangements of circuitry being divided between different or multiple substrates, chips or circuit boards, e.g. stacked image sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/12—Analogue/digital converters
- H03M1/1205—Multiplexed conversion systems
- H03M1/123—Simultaneous, i.e. using one converter per channel but with common control or reference circuits for multiple converters
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/12—Analogue/digital converters
- H03M1/34—Analogue value compared with reference values
- H03M1/38—Analogue value compared with reference values sequentially only, e.g. successive approximation type
- H03M1/46—Analogue value compared with reference values sequentially only, e.g. successive approximation type with digital/analogue converter for supplying reference values to converter
- H03M1/466—Analogue value compared with reference values sequentially only, e.g. successive approximation type with digital/analogue converter for supplying reference values to converter using switched capacitors
Abstract
本公开涉及逐次逼近型模数转换器、成像设备、成像系统以及移动体。一种逐次逼近型模数转换器,使比较器比较模拟信号与第一数模转换器转换成电压的比较信号,其中由偏移单元向比较信号施加偏移。逐次逼近型模数转换器能够成功地执行信号的第二次AD转换和相继的AD转换。
Description
技术领域
本公开涉及成像设备、成像系统和移动体。
背景技术
已知成像设备包括将从像素输出的信号转换成数字信号的模数转换器。成像设备的模数转换器的示例在日本专利公开No.2011-55535中被公开为逐次逼近型模数转换器。日本专利公开No.2011-55535中的逐次逼近型模数转换器多次执行模拟信号的AD转换以获得数字信号。计算数字信号的平均值,以减少模拟信号中的噪声分量。根据日本专利公开No.2011-55535,第一次AD转换获得N位数字信号。在第二次AD转换和相继的AD转换中,N位中的高n位的值固定为与通过第一次AD转换获得的数字信号的高n位的值相同的值,并且执行(N-n)位模拟信号的AD转换。这减少了第二次AD转换和相继的AD转换的时间。根据日本专利公开No.2011-55535,当执行第二AD转换和相继的AD转换时,AD转换器的生成参考信号的处理阶段从第一次AD转换获得N位数字信号时的处理阶段返回几位。
发明内容
本公开提供了一种逐次逼近型模数转换器,它将模拟信号转换成N位(N是2或更大的整数)数字信号。逐次逼近型模数转换器包括:接收模拟信号和比较信号作为输入的比较器;将比较信号转换成与N位中的每一位对应的电压的第一数模转换器;包括偏移单元的第二数模转换器,其中偏移单元将与N位中的低n位对应的偏移施加于比较信号,以及使比较器在模拟信号与比较信号(具有偏移)之间执行多次比较的控制器,其中比较信号被第一数模转换器转换成电压。由偏移单元施加到比较信号的偏移量在多次比较中的每一次比较中是相同的量。
根据以下参考附图对示例性实施例的描述,其它特征将变得清楚。
附图说明
图1例示了成像设备的结构。
图2例示了像素的等效电路。
图3例示了模数转换器的等效电路。
图4例示了数模转换器的等效电路。
图5是例示成像设备的操作的时序图。
图6是例示AD转换的过程的图表。
图7例示了成像设备的结构。
图8例示了放大器和模数转换器的等效电路。
图9例示了成像设备的操作。
图10例示了AD转换。
图11例示了层压型成像设备的结构。
图12例示了像素阵列包括的像素的布置。
图13以平面图例示了层压型成像设备的布置。
图14例示了成像设备的结构。
图15例示了成像设备的截面结构。
图16例示了像素和信号处理电路之间的连接。
图17A和图17B例示了像素的等效电路。
图18A和图18B例示了成像设备的操作。
图19A和图19B例示了成像设备的操作。
图20例示了成像系统的结构。
图21A和图21B例示了移动体的结构。
图22例示了成像系统的处理。
具体实施方式
下面描述的技术涉及逐次逼近型模数转换器,它可以成功地执行信号的第二次AD转换和相继的AD转换。
以下将参考附图描述实施例。贯穿实施例,相似的部件由相似的附图标记指定,并且省略重复的描述。实施例可以被部分地修改或组合。
第一实施例
将参考图1中的电路框图描述根据第一实施例的成像设备的结构。成像设备包括图1中例示的部件。像素阵列102包括布置在矩阵中的像素11。在图1例示的示例中,像素阵列102包括布置成四行三列的像素11。但是,像素阵列102的布置不限于此。每个像素11根据入射在像素11上的光生成像素信号。相同行中的像素11连接到驱动线中的对应一条驱动线。经由驱动线从垂直扫描电路101向像素11供给相应的控制信号,以控制像素11的操作。每条驱动线包括稍后描述的控制线。相同列中的像素11连接到信号线201中的对应一条信号线201。经由信号线201发送的电压信号被称为信号Vv1。在经由信号线201从像素11发送像素信号的情况下,信号Vv1具有与相应像素信号对应的值。
成像设备包括模数转换器107。模数转换器107是逐次逼近型模数转换器。模数转换器(以下称为ADC)107包括相应的数模转换器104(以下称为DAC 104。DAC是数模转换器的缩写)。ADC 107还包括相应的比较器105和控制电路106。
除了信号Vv1之外,还将比较信号从DAC 104输入到比较器105。比较器105将信号Vv1与比较信号进行比较,并将比较结果输出到控制电路106。
控制电路106将从比较器105输入的比较结果输出到相应的存储器108。输出到存储器108的比较结果是与信号Vv1对应的数字信号。
水平扫描电路109通过水平扫描来每列依次从存储器108读取被输出到存储器108的数字信号。
DAC 104、比较器105、控制电路106和存储器108被布置成用于相应的信号线201。
图2例示了根据本实施例的像素11之一的等效电路。每个像素11包括作为光电转换器的光电二极管601a和601b。光通过滤色器和微透镜(未例示),并入射在像素11的光电二极管601a和601b上。入射在光电二极管601a上的光具有与入射在光电二极管601b上的光基本上相同的波长。
光电二极管601a连接到浮置扩散部分(以下称为FD部分)605,转移晶体管603a插入在光电二极管601a和浮置扩散部分605之间。转移晶体管603a的栅极连接到垂直扫描电路(图2中未例示),控制线650插入在转移晶体管603a的栅极与垂直扫描电路之间。
光电二极管601b连接到浮置扩散部分(以下称为FD部分)605,转移晶体管603b插入在光电二极管601b和浮置扩散部分605之间。转移晶体管603b的栅极连接到垂直扫描电路(图2中未例示),控制线655插入在转移晶体管603b的栅极与垂直扫描电路之间。
FD部分605连接到放大晶体管607的栅极以及复位晶体管606。
向复位晶体管606和放大晶体管607供给电源电压Vdd。复位晶体管606的栅极连接到垂直扫描电路(图2中未例示),控制线660插入在复位晶体管606的栅极与垂直扫描电路之间。
放大晶体管607连接到选择晶体管608。选择晶体管608的栅极连接到垂直扫描电路(图2中未例示),控制线665插入在选择晶体管608的栅极与垂直扫描电路之间。
选择晶体管608连接到对应的信号线201。
图3例示了图1中例示的ADC 107之一的等效电路。ADC 107包括比较器105、DAC104和控制电路106。
提供输入电容的电容器元件Cin1和Cin2中的每个的节点之一连接到比较器105。信号Vv1被输入到电容器元件Cin1的另一个节点。信号Vdac被输入到电容器元件Cin2的另一个节点。开关SW1部署在比较器105的连接到电容器元件Cin1的输入节点和比较器105的输出节点之间的电路径上。开关SW2部署在比较器105的连接到电容器元件Cin2的输入节点和比较器105的输出节点之间的电路径上。开关SW1和开关SW2由未例示的定时发生器控制。
每个DAC 104包括第一DAC 104-1和第二DAC 104-2。信号COUT从对应的比较器105输入到每个控制电路106。时钟信号CLK从未例示的定时发生器输入到控制电路106。控制电路106将信号CON1输出到第一DAC 104-1。控制电路106还将信号CON2输出到第二DAC 104-2。
DAC 104的等效电路
图4例示了DAC 104之一的等效电路的细节。图4例示了第一DAC 104-1的等效电路。图4还例示了第二DAC 104-2的等效电路。
第一DAC 104-1包括电容器元件C1-0至C1-6。开关S1-0至S1-6被部署成与电容器元件C1-0至C1-6对应。在图4中,省略了电容器元件C1-2至C1-4和开关S1-2至S1-4的例示。被省略的电容器元件C1-2至C1-4和开关S1-2至S1-4之间的连接关系与电容器元件C1-0和开关S1-0之间的关系相同。电容器元件C1-0至C1-6的电容值满足二进制权重关系(binaryweight relationship)。电容器元件C1-0的电容值为1C。电容器元件C1-1至C1-6的电容值依次为2C、4C、8C、16C、32C和64C。开关S1-0至S1-6将电压VRH或VRL连接到对应的电容器元件C1-0至C1-6。从每个控制电路106输出的信号CON1控制切换电压VRH或VRL的连接。
第二DAC 104-2包括电容器元件C2-0至C2-3和开关S2-0至S2-3。电容器元件和开关之间的连接关系与第一DAC 104-1的相同。电容器元件C2-0至C2-3的电容值满足二进制权重关系。电容器元件C2-0的电容值为1C。电容器元件C2-1至C2-3的电容值依次为2C、4C和8C。
第一DAC 104-1执行7位信号的AD转换。第二DAC 104-2执行4位信号的AD转换。根据本实施例,随机噪声的±6σ在7LSB内。为此,第二DAC 104-2执行4位信号的AD转换。
图5例示了利用根据本实施例的成像设备的AD转换。
根据本实施例,对于每个像素信号执行多次AD转换。现在将描述每个像素信号。在复位晶体管606不从FD部分605排出电荷或者转移晶体管603a和603b不将电荷转移到FD部分605的状态下,从放大晶体管607输出被视为像素信号的信号。例如,在一些情况下,FD部分605的电压由于随机噪声而变化,而放大晶体管607在每个像素11的选择晶体管608接通时输出信号。随机噪声通常由于放大晶体管607造成。因此,放大晶体管607的信号电平变化。但是,复位晶体管606不从FD部分605排出电荷或者转移晶体管603a和603b不将电荷转移到FD部分605。因而,FD部分605的电压由于这种噪声引起的变化导致基本上在信号值被视为像素信号的范围内的信号值变化。
根据本实施例,对于每个像素信号执行四次AD转换。第一次AD转换生成7位数字信号,作为与像素信号对应的N位(N是2或更大的整数)数字信号。第二次AD转换和相继的AD转换生成与N位中的低n位(特别地,低4位)对应的数字信号。
图5例示了作为Vv1和Vdac的示例的图3中例示的信号Vv1和信号Vdac的电压。图5中的水平轴是时间。垂直轴表示SAR(比吸收率)值,该值表示与信号Vdac对应的数字信号的值。图5还例示了开关S1-0至S1-6和S2-0至S2-3的操作。图5中被例示为L的开关连接到电压VRL。图5中被例示为H的开关连接到电压VRH。
现在将描述图5中例示的信号Vv1的电压。
垂直扫描电路将连接到对应的转移晶体管603a的栅极的每条控制线650的电压和连接到对应的转移晶体管603b的栅极的每条控制线655的电压设定为高电平电压。因此,存储在光电二极管601a和光电二极管601b中的电荷(根据本实施例是电子)经由转移晶体管603a和转移晶体管603b被转移到FD部分605。在FD部分605处,将光电二极管601a和光电二极管601b的电荷相加。因此,FD部分605的电压与通过将光电二极管601a和光电二极管601b的电荷相加而获得的电荷对应。假设放大晶体管607基于仅从光电二极管601a的电荷导出的FD部分605的电压而输出的信号被称为信号A。假设放大晶体管607基于仅从光电二极管601b的电荷导出的FD部分605的电压而输出的信号被称为信号B。根据该参考,放大晶体管607基于与通过将光电二极管601a和601b的电荷相加获得的电荷对应的FD部分605的电压而输出的信号可以被视为信号A+B,信号A+B是信号A和信号B之和。因而,信号A+B被输出到对应的信号线201。
图5中例示的信号Vvl是与信号A+B对应的电压。
ADC 107执行信号A+B的AD转换。
在时间t0处,每个控制电路106输出信号CON1,以使对应的第一DAC 104-1的开关连接到电压VRL。
在时间t0处,控制电路106输出信号CON2,以使对应的第二DAC 104-2的开关S2-3连接到电压VRH。第二DAC 104-2在这个时候的输出与在开关S2-3连接到电压VRL的情况下的输出相差所施加的一个偏移。虽然这将在后面描述,但是施加与通过AD转换生成的数字信号的8LSB对应的偏移。未例示的定时发生器将开关SW1和SW2从接通切换为断开,信号Vdac输出。因此,每个比较器105的复位被取消。因此,信号Vdac的初始值变为其中开关S1-0至S1-6和开关S2-0至S2-2连接到电压VRL并且开关S2-3连接到电压VRH的电压。第二DAC104-2的开关S2-3和电容器元件C2-3用作将偏移施加到比较信号的偏移单元。
随后,控制电路106使开关S1-6连接到电压VRH。因此,信号Vdac变为与SAR值1000000对应的电压。信号Vv1大于信号Vdac的振幅,并且比较器105输出高电平比较结果信号。控制电路106接收高电平比较结果信号,并将数字信号的第七位(该位是MSB(最高有效位))的值设定为1。
接收高电平比较结果信号的控制电路106使开关S1-5连接到电压VRH,其中开关S1-6连接到电压VRH。因此,信号Vdac变为与SAR值1100000对应的电压。信号Vv1小于信号Vdac的振幅,并且比较器105输出低电平比较结果信号。控制电路106接收低电平比较结果信号,并将数字信号的第六位的值设定为0。
接收低电平比较结果信号的控制电路106使开关S1-5连接到电压VRL并使开关S1-4连接到电压VRH,其中开关S1-6连接到电压VRH。因此,信号Vdac变为与SAR值1010000对应的电压。信号Vv1小于信号Vdac的振幅,并且比较器105输出低电平比较结果信号。控制电路106接收低电平比较结果信号,并将数字信号的第五位的值设定为0。
接收低电平比较结果信号的控制电路106使开关S1-5和开关S1-4连接到电压VRL并使开关S1-3连接到电压VRH,其中开关S1-6连接到电压VRH。因此,信号Vdac变为与SAR值1001000对应的电压。信号Vv1大于信号Vdac的振幅,并且比较器105输出高电平比较结果信号。控制电路106接收高电平比较结果信号,并将数字信号的第四位的值设定为1。
接收高电平比较结果信号的控制电路106使开关S1-5和开关S1-4连接到电压VRL,其中开关S1-6和S1-3连接到电压VRH。控制电路106使开关S1-2连接到电压VRH。因此,信号Vdac变为与SAR值1001100对应的电压。信号Vv1小于信号Vdac的振幅,并且比较器105输出低电平比较结果信号。控制电路106接收低电平比较结果信号,并将数字信号的第三位的值设定为0。
接收低电平比较结果信号的控制电路106使开关S1-5、开关S1-4和开关S1-2连接到电压VRL,其中开关S1-6和开关S1-3连接到电压VRH。控制电路106使开关S1-1连接到电压VRH。因此,信号Vdac变为与SAR值1001010对应的电压。信号Vv1大于信号Vdac的振幅,并且比较器105输出高电平比较结果信号。控制电路106接收高电平比较结果信号,并将数字信号的第二位的值设定为1。
接收高电平比较结果信号的控制电路106使开关S1-5、S1-4和S1-2连接到电压VRL,其中开关S1-6、S1-3和S1-1连接到电压VRH。控制电路106使开关S1-0连接到电压VRH。因此,信号Vdac变为与SAR值1001011对应的电压。信号Vv1大于信号Vdac的振幅,并且比较器105输出高电平比较结果信号。控制电路106接收高电平比较结果信号,并将数字信号的LSB(最低有效位)的值设定为1。因此,与信号A+B对应的数字信号D1被确定为1001011。在这个时候,第一DAC 104-1的开关S1-0、S1-1、S1-3和S1-6连接到电压VRH。第一DAC 104-1的开关S1-2、S1-4和S1-5连接到电压VRL。
在这种状态下,控制电路106输出信号CON2,以将第二DAC 104-2的开关S2-3所连接到的电压从电压VRH变为电压VRL。因此,信号Vdac的电压变为与1000011对应的电压,这个值是通过将数字信号D1的从最低有效位起的第四位的值设定为0而获得的值。即,与比数字信号D1小8LSB的数字信号对应的信号Vdac被输出,并且这个信号Vdac与当通过第一次AD转换确定数字信号D1时的信号Vdac不同。即,在时间t0处,信号Vdac的初始值是当第二DAC104-2的开关S2-3连接到电压VRH时的值。因此,信号Vdac可以被确定为与以下电压对应:该电压的振幅低于当数字信号D1的值通过第一次AD转换确定时信号Vdac的电压的振幅。这使得即使当信号Vvl的振幅由于随机噪声受到影响而减小时,也可能在允许的范围内执行4位信号的第二次AD转换。
如果开关S2-3在时间t0处连接到电压VRL,那么第二DAC 104-2不能减小信号Vdac的振幅。因而,不能即使在信号Vvl的振幅由于随机噪声受到影响而减小时也在允许的范围内执行4位信号的第二次AD转换。假设信号Vdac的电压通过切换第一DAC 104-1的开关S1-3而不提供第二DAC 104-2来改变。但是,在这种情况下,有必要根据数字信号D1的第四位的值来改变处理。例如,在数字信号D1的值为1000000的情况下,开关S1-6所连接到的电压从电压VRH变为电压VRL,以生成与减小了16LSB的数字信号对应的信号Vdac。此外,开关S1-3所连接到的电压有必要从电压VRL变为电压VRH。因此,需要根据数字信号D1的值改变处理。这使得处理变得复杂。
但是,根据本实施例,利用连接到电压VRH的第二DAC 104-2的开关S2-3来确定信号Vdac的初始值。这使得与8LSB对应的偏移能够被施加到信号Vdac,而不取决于于数字信号D1的值。
将描述具有偏移的第二次AD转换。
关于信号Vv1,电压受随机噪声的影响,并且与执行第一次AD转换时的电压不同。
信号Vv1的振幅大于信号Vdac的振幅,其中开关S2-3连接到电压VRL。因而,比较器105输出高电平比较结果信号。
控制电路106接收高电平比较结果信号并使开关S2-3连接到电压VRH。因此,信号Vdac变为与数字信号D1的信号值对应的电压。当比较器105的比较结果信号处于低电平时,信号Vvl的振幅被决定为低于使得第二次AD转换能够执行的范围。在这种情况下,可以改变第二次AD转换的范围,使得允许振幅小的电压,或者取消第二次AD转换。在决定是不必要的情况下,不必要在时间t2处将开关S2-3所连接到的电压从电压VRH变为电压VRL。
在从时间t2到时间t3的时段期间,其它AD转换可以与第一次AD转换相同。因此,可以获得具有值0110的数字信号D2。
在从时间t4到时间t5的时段期间的AD转换可以与第二次AD转换相同。因此,可以获得具有值1011的数字信号D3。
在从时间t6到时间t7的时段期间的AD转换可以与第二次AD转换相同。因此,可以获得具有值0010的数字信号D4。
关于所获得的数字信号执行以下处理。
所获得的数字信号D2、D3和D4的MSB被反转(invert)。反转后的数字信号Dv2、Dv3和Dv4如下:数字信号Dv2=1110,数字信号Dv3=0011,数字信号Dv4=1010。数字信号Dv2、Dv3和Dv4表示与数字信号D1的差异。
随后,通过执行以下计算来确定与放大的信号Vamp对应的数字信号DF的值:数字信号DF=D1+(Dv2+Dv3+Dv4)/4。数字信号DF与通过从数字信号D1减少随机噪声而获得的信号对应。获得数字信号DF的计算可以由图1中例示的存储器108或部署在成像设备外部的信号处理单元来执行。
在根据本实施例的成像设备中,用作偏移单元的第二DAC 104-2的开关S2-3和电容器元件C2-3因此将偏移施加到比较信号。用作控制器的控制电路106使比较器比较作为模拟信号的信号Vv1与信号Vdac,其中信号Vdac是第一DAC 104-1转换成电压的比较信号,其中偏移被施加到比较信号。以这种方式,可以将预定位数的偏移施加到信号Vdac,以执行第二次AD转换和相继的AD转换,而不管数字信号D1的值如何。
第二实施例
根据第一实施例,第二次AD转换和相继的AD转换作为4位信号的AD转换被执行,并且N位中的低n位是4位。将描述根据第二实施例的第二次AD转换和相继的AD转换的位数。
图6是例示根据本实施例的用于确定第二次AD转换和相继的AD转换的位数的处理的图表。
假设随机噪声具有正态分布,那么第二次AD转换是6σLSB或更大的AD转换,其中σ是标准偏差。根据本实施例,假设如第一实施例中那样,6σ是7或更小。
ADC 107执行第(N-1)次AD转换。
未例示的计算单元估计噪声的绝对值|Nam|。该绝对值可以被估计为:|Nam|≤6σ×√(N-1)。当N-1为4时,绝对值被估计为:|Nam|≤3.5(LSB)。
因而,计算单元决定噪声与位数大约为X位的信号对应。由于在这里|Nam|≤3.5(LSB)成立,因此计算单元决定噪声与位数大约为2位(包括3.5LSB)的信号对应。计算单元对迄今为止获得的数字信号求平均,以生成数字信号Ave。
计算单元从数字信号Ave中减去与2^X LSB(符号“^”表示幂)对应的信号,以获得与偏移对应的信号。计算单元将后续AD转换AD(N)的位数确定为X+1位。
在N=2的情况下,6σ与7LSB对应,并且X+1是4位。因而,第二次AD转换是4位信号的AD转换。在N=3和N=4的情况下,X+1是4位。类似地,第三次AD转换和第四次AD转换是4位信号的AD转换。在N=5的情况下,X+1是3位。因而,第五次AD转换是3位信号的AD转换。因此,随着执行AD转换的次数增加,后续AD转换的位数能够减少。
根据本实施例的成像设备能够通过估计噪声的量值来减少多次执行AD转换的时段。
第三实施例
将描述根据第三实施例的成像设备,主要是第三实施例与第一实施例的不同之处。
图7例示了根据本实施例的成像设备的结构。根据本实施例的成像设备包括放大器103,放大器103放大信号Vvl并将放大的信号Vamp输出到相应的比较器105。
图8例示了图7中的一个放大器103和对应的ADC 107。每个放大器103的增益值是可变的,并且通过使用来自未例示的定时发生器的信号Gain来确定。信号Gain是确定其放大因子的信息,并且还被输入到ADC 107的控制电路106中。控制电路106通过使用信号Gain来确定第二次AD转换和相继的AD转换的位数。
放大器103使用通过使用用于信号Vv1的信号Gain所确定的增益值。放大器103通过使用增益值放大信号Vvl来获得放大的信号Vamp,并将放大的信号Vamp输出到比较器105。
随着放大器103的增益值增加,放大的信号Vamp中包含的噪声的量值增加。因而,根据本实施例的成像设备根据放大器103的增益值的增加来增加第二次AD转换和相继的AD转换的位数。假设随机噪声的6σ的值在增益值是1倍、4倍和16倍的情况下依次为7LSB、15LSB和31LSB。在增益值是1倍的情况下,第二次AD转换和相继的AD转换的位数通常被确定为3位。在增益值是4倍的情况下,第二次AD转换和相继的AD转换的位数通常被确定为4位。在增益值是16倍的情况下,第二次AD转换和相继的AD转换的位数通常被确定为5位。因此,第二次AD转换和相继的AD转换的位数根据放大器103的增益值的增加而增加。这使得根据本实施例的成像设备能够根据放大器的增益值生成噪声降低的数字信号。
根据本实施例的成像设备能够与第二实施例组合。
第四实施例
将描述根据第四实施例的成像设备,主要是第四实施例与第一实施例的不同之处。
在根据本实施例的成像设备中,图2中例示的每个像素11基于对应的光电二极管601a的电荷来输出信号(信号A)。像素11还基于通过将对应的光电二极管601a和光电二极管601b的电荷相加而获得的电荷来输出信号(信号A+B)。信号A是基于一些光电转换器的电荷的第一信号。信号A+B是基于所有光电转换器的电荷的第二信号。
在根据本实施例的成像设备中,信号A的AD转换的位数小于信号A+B的AD转换的位数。具体而言,信号A的AD转换的位数比信号A+B的AD转换的位数小低1位(lower 1bit)。
根据本实施例,信号N的AD转换的位数小于信号A+B的AD转换的位数。具体而言,信号N的AD转换的位数比信号A+B的AD转换的位数小高2位(upper 2bits)。
图9是例示根据本实施例的成像设备的操作的时序图。图9中的附图标记650、655和660与图2中的控制线对应。
在时间t102处,垂直扫描电路101将每条控制线660的电压从高电平改变为低电平。因此,每个FD部分605的复位被取消,并且噪声信号(信号N)被输出到对应的信号线201。
在从时间t103到时间t107的时段期间,ADC 107执行信号N的AD转换。在从时间t103到时间t104的时段期间,以A位执行信号N的第一次AD转换(NAD1)。
以小于A位的B位执行信号N的第二次AD转换和相继的AD转换。B位信号的AD转换被执行三次(NAD2至NAD4)。
通过对由NAD2至NAD4获得的数字信号和由NAD1获得的数字信号求平均所获得的信号被用于获得与信号N对应的数字信号DN。
在时间t108处,垂直扫描电路101将控制线650的电压设定为高电平电压。在时间t109处,垂直扫描电路101将控制线650的电压设定为低电平电压。因此,光电二极管601a的电荷被转移到FD部分605。放大晶体管607然后将与光电二极管601a的电荷对应的信号A输出到信号线201。
在从时间t110到时间t114的时段期间,ADC 107执行信号A的AD转换。在从时间t110到时间t111的时段期间,以C位执行信号A的第一次AD转换(SAD1_A)。C位的位数大于A位的位数。
以小于C位的D位执行信号A的第二次AD转换和相继的AD转换。D位信号的AD转换被执行三次(SAD2_A至SAD4_A)。D位的位数大于B位的位数。
通过对由SAD2_A至SAD4_A获得的数字信号和由SAD1_A获得的数字信号求平均而获得的信号被用于获得与信号A对应的数字信号DA。
在时间t115之前,FD部分605具有从光电二极管601a转移的电荷。
在时间t115处,垂直扫描电路101将控制线650和控制线655的电压设定为高电平电压。在时间t116处,垂直扫描电路101将控制线650和控制线655的电压改变为低电平电压。因此,在从时间t109到时间t116的时段期间存储在光电二极管601a中的电荷和从时间t101起直到时间t116的时段期间存储在光电二极管601b中的电荷被转移到FD部分605。然后将光电二极管601a和光电二极管601b的电荷加到FD部分605的电荷上。放大晶体管607将信号A+B输出到信号线201上,其中信号A+B与通过将光电二极管601a和光电二极管601b的电荷相加而获得的电荷对应。
在从时间t117到时间t121的时段期间,ADC 107执行信号A+B的AD转换。在从时间t117到时间t118的时段期间,以E位执行信号A+B的第一次AD转换(SAD1_B)。E位的位数大于C位的位数。
以小于E位的F位来执行信号A的第二次AD转换和相继的AD转换。F位信号的AD转换被执行三次(SAD2_B至SAD4_B)。F位的位数大于B位的位数。
通过对由SAD2_B至SAD4_B获得的数字信号和由SAD1_B获得的数字信号求平均而获得的信号被用于获得与信号A+B对应的数字信号DAB。
信号N、信号A和信号A+B的最大振幅满足以下关系:信号N的最大振幅<信号A的最大振幅<信号A+B的最大振幅。根据这个关系,根据本实施例的成像设备的ADC改变信号的第一次AD转换、第二次AD转换和相继的AD转换的位数。
根据本实施例的AD转换的位数总结如下:NAD1的位数是A位,NAD2至NAD4的位数是B位,SAD1_A的位数是C位,SAD2_A至SAD4_A的位数是D位,SAD1_B的位数是E位,并且SAD2_B至SAD4_B的位数是F位。
位数的关系如下。在信号的第一次AD转换期间,位数满足A<C<E。在信号的第二次AD转换和相继的AD转换期间,位数满足B<D<F。F位的位数通常小于A位的位数。因而,B<D<F<A<C<E成立。
图10例示了根据本实施例的每个ADC 107执行信号A的AD转换的操作。信号A的AD转换与第一实施例中的AD转换的不同之处在于,位数小于信号A+B的AD转换中的位数,并且开关S1-0和S2-0连接到的电压固定到电压VRL。AD转换的其它事项与第一实施例中的相同。
这使得根据本实施例的成像设备能够生成噪声减小的数字信号,并且使得能够减少多次执行信号的AD转换的时段。
根据本实施例,信号A的AD转换的位数小于信号A+B的AD转换的位数。为了增加信号A的分辨率,信号A的位数可以大于信号A+B的位数。图2中的像素11包括针对单个微透镜的光电二极管601a和601b,如上所述。因而,使用信号A和通过从信号A+B中减去信号A而获得的信号B使得能够以相位差检测方式检测焦点。为了增加焦点检测的精度,信号A的分辨率能够高于信号A+B的分辨率。在这种情况下,信号A的位数可以大于信号A+B的位数。这种情况下的位数满足A<E<C。
在另一个示例中,通过从信号A+B中减去信号A来获得信号B,用于焦点检测。在这个时候,信号A的分辨率优选地与信号B的分辨率匹配。从这个角度来看,信号A的AD转换的位数可以与信号A+B的AD转换的位数相同。这种情况下的位数满足A<C=E。根据本实施例的位数的关系包括A<C≤E或A<E≤C。
第五实施例
根据第一实施例至第四实施例的每个成像设备不限于在半导体基板上形成的成像设备,并且可以是层压型成像设备。
以下描述的第五实施例涉及层压型成像设备。
成像设备的总体结构
图11例示了根据本实施例的成像设备的第一芯片1和第二芯片5。第一芯片1是包括像素阵列的像素芯片,像素11按行和列布置在像素芯片中。第二芯片5是电路芯片,信号处理电路21按行和列的形式布置在电路芯片上。虽然图11中仅例示了像素11和信号处理电路21,但是第一芯片1还包括用于控制像素11的控制线以及通过其发送从像素11输出的信号的信号线。第一芯片1或第二芯片5包括适当的驱动电路,诸如垂直扫描电路和定时发生器。
像素阵列中的像素布置
图12例示了第一芯片1的像素阵列。根据本实施例的像素阵列的像素11包括有效像素、光学黑像素(OB像素)和参考像素。稍后将描述每个像素的结构。像素阵列具有有效像素区域810、水平OB像素区域812A、垂直OB像素区域812B和参考像素区域815。
垂直OB像素区域812B位于参考像素区域815和有效像素区域810之间。水平OB像素区域812A位于有效像素区域810的边缘之外。水平OB像素区域812A和垂直OB像素区域812B的组合形成与有效像素区域810相邻的L形OB像素区域。
平面视图中像素与信号处理电路的布置关系
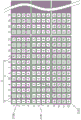
图13例示了图12中的区域820的平面图中的第一芯片1的像素11和第二芯片5的信号处理电路21(A)至21(C)的布局。在下面的描述中,当不区分信号处理电路21(A)至21(C)时,信号处理电路简单地由21表示。
像素11包括有效像素13。图13还例示了每个有效像素13包括的滤色器的颜色。图13中例示的R表示对应的有效像素13包括针对红色(R)的滤色器。类似地,G表示对应的有效像素13包括针对绿色(G)的滤色器,并且B表示对应的有效像素13包括针对蓝色的滤色器(B)。
换句话说,波长与第一颜色对应的光入射在一些像素上,而波长与第二颜色对应的光入射在其它像素上。
与红色对应的波长通常是600nm至830nm。与绿色对应的波长通常是500nm至600nm。与蓝色对应的波长通常是360nm至500nm。
每个滤色器的颜色可以通过滤色器的透射率达到峰值处的峰值波长来区分。针对蓝色的滤色器的透射率的峰值波长通常是大约450nm。针对绿色的滤色器的透射率的峰值波长通常是大约540nm。针对红色的滤色器的透射率的峰值波长通常是大约630nm。
每个有效像素13的滤色器可以由滤色器构件形成。每个像素11的滤色器可以由具有不同成分的滤色器构件形成,只要其中部署有滤色器的区域的颜色与另一个区域中的颜色基本相同。
在图13中,像素中的一些由符号“A”表示。由“A”表示的像素是光学黑像素15(以下称为OB像素15),其通过遮光膜遮光。每个有效像素13具有第一导电类型半导体区域,该半导体区域用作存储通过光电转换生成的电荷的电荷生成单元。每个OB像素15包括与有效像素13的电荷生成单元对应的第一导电类型半导体区域。OB像素15的第一导电类型半导体区域被遮光。
在图13中,像素中的一些由符号“N”表示。由“N”表示的像素是参考像素17。参考像素17不具有有效像素13和OB像素15所具有的第一导电类型半导体区域。
在平面图中,每个信号处理电路21与按行和列布置的像素11中的一些重叠。在这里,每个信号处理电路21与布置成4行和12列的像素11重叠。特别地,信号处理电路21中的一个与OB像素15重叠。另一个信号处理电路21与有效像素13和参考像素17重叠。每个信号处理电路21包括多路复用电路和AD转换电路(将稍后描述)。因而,可以说在每个信号处理电路21中,多路复用电路或AD转换电路或两者与像素11重叠。
根据本实施例的AD转换电路对布置在一列中的像素11的信号执行AD转换,这将稍后描述。例如,信号处理电路21(A)将第一列中的像素11(即,OB像素15和参考像素17)的信号转换成数字信号,并且不执行有效像素13的信号的AD转换。
信号处理电路21(B)将第二列中的像素11(即,有效像素13、OB像素15和参考像素17)的信号转换成数字信号。
信号处理电路21(C)将第三列的像素11(即,有效像素13、OB像素15和参考像素17)的信号转换成数字信号。
通过示例描述了这种布置。根据本实施例,像素11中的一些可以在每个信号处理电路21上按行和列布置。
成像设备的等效电路
图14例示了成像设备的等效电路。在图11中例示的像素11中,第一列、第二列和第N列中的像素11在图14中示出。第一芯片1对于一列中的像素11包括四条信号线201(A)至201(D)。在以下描述中,当不区分信号线201(A)至201(D)时,信号线简单地由201表示。第一列中的像素11连接到信号线201(A)。类似地,第二列至第四列中的像素11连接到信号线201(B)至201(D)。信号线201(A)至201(D)以与第一列中的像素11相同的方式布置。
与一列中的像素11对应的信号线201(A)至201(D)连接到包括在每个信号处理电路21中的多路复用电路(以下称为MPX电路)350(A),连接件303插入在信号线201(A)至201(D)与多路复用电路350(A)之间。信号处理电路21包括AD转换电路(以下在描述和附图中称为ADC)360(A)和360(B)。MPX电路350(A)是第一选择单元,其包括连接到信号线201(A)至201(D)的输入部分和连接到ADC 360(A)的输出部分。
ADC 360可以是根据第一实施例和第四实施例描述的ADC 107。
与另一列中的像素11对应的信号线201(A)至201(D)连接到包括在每个信号处理电路21中的MPX电路350(B),连接件303插入在信号线201(A)至201(D)与多路复用电路350(B)之间。MPX电路350(B)是第二选择单元,其包括连接到信号线201(A)至201(D)的输入部分和连接到ADC 360(B)的输出部分。
如图14所示,连接到每个ADC 360的像素11属于相同列。根据本实施例,连接到ADC360(A)的像素11是属于相同列的OB像素15和参考像素17。类似地,连接到ADC 360(B)的像素11是属于相同列的OB像素15和参考像素17。
ADC 360(A)和ADC 360(B)执行在图12中例示的水平OB像素区域812A中布置的OB像素15的信号的AD转换。ADC 360(A)和ADC 360(B)执行在图12中例示的垂直OB像素区域812B中布置的OB像素15的信号的AD转换。
连接到ADC 360(C)的像素11属于相同列。根据本实施例,连接到ADC 360(C)的像素11是有效像素13、OB像素15和参考像素17。ADC 360(C)不执行布置在图12中例示的水平OB像素区域812A中的OB像素15的信号的AD转换。ADC 360(C)执行布置在有效像素区域810中的有效像素13、布置在垂直OB像素区域812B中的OB像素15和布置在参考像素区域815中的参考像素17的信号的AD转换。
如图14所示,第二芯片5包括电流源310。电流源310经由连接件303按照列向信号线201供给电流。
如图14所示,水平OB像素区域812A中的OB像素15和参考像素17布置在像素阵列的第一列中。ADC 360(A)对从第一列中的OB像素15输出的信号执行AD转换。参考图13中的布置,图13中例示了平面图中的像素与信号处理电路21的布置关系。图13中例示的信号处理电路21(A)包括图14中例示的ADC 360(A)。即,可以说,在平面图中,水平OB像素区域812A中的OB像素15与执行OB像素15的信号的AD转换的ADC 360(A)重叠。还可以说,在平面图中,水平OB像素区域812A中的OB像素15与执行OB像素15的信号的AD转换的ADC 360(B)重叠。根据本实施例,在平面图中,ADC 360(A)和ADC 360(B)与第九列至第十二列中的有效像素13重叠。
ADC的布置
图15例示了信号处理电路21的布置的包括ADC 360的一部分以及像素阵列的像素布置的一部分。在图15中,与图12中的部件相似的部件由相似的附图标记表示。
信号处理电路21(A)连接到第一列中的像素11。具体而言,连接到第一列中的像素11的信号线201连接到连接件303(A)。连接件303(A)连接到信号处理电路21的输入部分160(A),连接布线170(A)插入在连接件303(A)与输入部分160(A)之间。因此,第一列中的像素11和信号处理电路21(A)彼此连接。
类似地,信号处理电路21(B)连接到第二列中的像素11。信号处理电路21(C)连接到第三列中的像素11。信号处理电路21(D)连接到第四列中的像素11。
从第一列中的像素11的第一像素组到第二列中的像素11的第二像素组的方向被称为第一方向。即,第一方向是列编号增加的方向。从连接到第一列中的像素11的信号处理电路21(A)到连接到第二列中的像素11的信号处理电路21(B)的方向被称为与第一方向相交的第二方向。对水平OB像素区域812A中的OB像素15的信号执行AD转换的信号处理电路21能够以与以上相同的方式布置。类似地,对有效像素13的信号执行AD转换的信号处理电路21能够以与以上相同的方式布置。
根据本实施例,水平OB像素区域812A包含成列的OB像素15。假设列数是X,则连接到水平OB像素区域812A中的OB像素15的信号处理电路21被布置成X行。如图12和图15所示,水平OB像素区域812A包含成行的OB像素15。因而,在平面图中,连接到水平OB像素区域812A中的OB像素15的信号处理电路21与水平OB像素区域812A重叠。以另一个角度来看,在平面图中,连接到水平OB像素区域812A中的OB像素15的MPX电路350与水平OB像素区域812A重叠。以另一个角度来看,在平面图中,执行水平OB像素区域812A中的OB像素15的信号的AD转换的ADC360与水平OB像素区域812A重叠。
连接件附近的成像设备的区段的结构
图16例示了图14中例示的成像设备的区段的结构。在图16中,主要例示第一列中的四行中的OB像素15和第五列中的四行中的参考像素17。图11中例示的第一芯片1和第二芯片5沿着键合表面300彼此接合。
根据本实施例的成像设备是背侧照射的成像设备。每个OB像素15包括未例示的光电转换器。信号线201位于光电转换器和键合表面300之间。信号线201在像素11的预定方向(沿着图16中的列的方向)上延伸。信号线201连接到连接件303,连接布线401插入在信号线201与连接件303之间。MPX电路350(A)连接到连接件303,连接布线405插入在MPX电路350(A)与连接件303之间。
在图16中,省略了图15中例示的连接布线170的例示。连接布线170可以包括在图16中例示的MPX电路350(A)中。在另一个示例中,连接布线170可以位于连接布线405和MPX电路350(A)之间的布线层上。
在平面图中,连接布线401、连接布线405和连接件303重叠。换句话说,信号处理电路21和信号线201能够以形成连接布线401以便在平面图中与连接布线405重叠的方式彼此连接。信号线201和MPX电路350能够通过将连接布线401连接到在预定方向上延伸的信号线201而彼此连接。在信号线201在预定方向上延伸的情况下,连接布线401和信号线201能够容易地彼此连接。
像素的等效电路
图17A例示了根据本实施例的有效像素13和对应的OB像素15之一的等效电路。有效像素13和OB像素15各自包括作为光电转换器的光电二极管601a和光电二极管601b。穿过微透镜(未例示)和如图13所示那样布置的滤色器的光入射在有效像素13的光电二极管601a和601b上。即,入射在光电二极管601a上的光的波长基本上与入射在光电二极管601b上的光的波长相同。OB像素15的光电二极管601a和601b被遮光。
光电二极管601a连接到浮置扩散部分(称为FD部分)605,转移晶体管603a插入在光电二极管601a与FD部分605之间。转移晶体管603a的栅极连接到垂直扫描电路(图17A中未例示),控制线650插入在转移晶体管603a的栅极与垂直扫描电路之间。
光电二极管601b连接到浮置扩散部分(称为FD部分)605,转移晶体管603b插入在光电二极管601b与FD部分605之间。转移晶体管603b的栅极连接到垂直扫描电路(图17A中未例示),控制线655插入在转移晶体管603b的栅极与垂直扫描电路之间。
FD部分605连接到放大晶体管607的栅极以及复位晶体管606。
复位晶体管606和放大晶体管607被供给电源电压Vdd。复位晶体管606的栅极连接到垂直扫描电路(图17A中未例示),控制线660插入在复位晶体管606的栅极与垂直扫描电路之间。
放大晶体管607连接到选择晶体管608。选择晶体管608的栅极连接到垂直扫描电路(图17A中未例示),控制线665插入在选择晶体管608的栅极与垂直扫描电路之间。
选择晶体管608连接到信号线201。
图17B例示了参考像素17之一的等效电路。参考像素17的等效电路与图17A中的等效电路的不同之处在于,其中部署电容器6010a和6010b,而不是光电二极管601a和601b。即,参考像素17不包括光电转换器。
成像设备的操作
MPX电路350(A)将与一列中的像素11对应的信号线201(A)至201(D)的信号顺序地输出到ADC 360(A)。图18A和图18B通过Row_n例示了从MPX电路350(A)输出的信号,其中n是与从MPX电路350(A)输出到ADC 360(A)的信号对应的像素行。即,高电平Row_1指示MPX电路350(A)向ADC 360(A)输出从第一行中的像素11输出到信号线201(A)的信号。
从每行中的像素11读取信号N的操作
在时间t1处,垂直扫描电路将要输出到第一行中的像素11的信号PSEL(1)设定为高电平信号。
在时间t2处,垂直扫描电路将要输出到第二行中的像素11的信号PSEL(2)设定为高电平信号。
在时间t3处,垂直扫描电路将要输出到第三行中的像素11的信号PSEL(3)设定为高电平信号。
之后,类似地,垂直扫描电路将要输出到第四行中的像素11的信号PSEL(4)设定为高电平信号。
在时间t5处,垂直扫描电路将要输出到第一行中的像素11的信号PRES从高电平信号改变为低电平信号。因此,信号N被输出到信号线201(A)。
在时间t6处,垂直扫描电路将要输出到第二行中的像素11的信号PRES从高电平信号改变为低电平信号。因此,信号N被输出到信号线201(B)。
在时间t7处,垂直扫描电路将要输出到第三行中的像素11的信号PRES从高电平信号改变为低电平信号。因此,信号N被输出到信号线201(C)。
在时间t8处,垂直扫描电路将要输出到第四行中的像素11的信号PRES从高电平信号改变为低电平信号。因此,信号N被输出到信号线201(D)。
每行中像素11的信号N的AD转换的操作
现在将描述信号N的AD转换。图18A和图18B例示了根据第四实施例描述的被多次执行的信号N的AD转换的AD转换块。
在时间t9处,MPX电路350(A)将信号线201(A)的信号(即,第一行中的像素11的信号N)输出到ADC 360(A)。ADC 360(A)将第一行中的像素11的信号N转换成数字信号。
在时间t10处,MPX电路350(A)将信号线201(B)的信号(即,第二行中的像素11的信号N)输出到ADC 360(A)。ADC 360(A)将第二行中的像素11的信号N转换成数字信号。
在时间t11处,MPX电路350(A)将信号线201(C)的信号(即,第三行中的像素11的信号N)输出到ADC 360(A)。ADC 360(A)将第三行中的像素11的信号N转换成数字信号。
在时间t12处,MPX电路350(A)将信号线201(D)的信号(即,第四行中的像素11的信号N)输出到ADC 360(A)。ADC 360(A)将第四行中的像素11的信号N转换成数字信号。
读取每行中的像素11的信号A+B的操作
在时间t10处,垂直扫描电路将要输出到第一行中的像素11的信号PTXA和信号PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。FD部分605将光电二极管601a和光电二极管601b的电荷相加。因此,FD部分605的电压与通过将光电二极管601a和光电二极管601b的电荷相加而获得的电荷对应。假设放大晶体管607基于仅从光电二极管601a的电荷导出的FD部分605的电压而输出的信号被称为信号A。假设放大晶体管607基于仅从光电二极管601b的电荷导出的FD部分605的电压而输出的信号被称为信号B。根据该参考,放大晶体管607基于与通过将光电二极管601a和光电二极管601b的电荷相加而获得的电荷对应的FD部分605的电压而输出的信号可以被视为信号A+B,信号A+B是信号A和信号B之和。第一行中的像素11的信号A+B被输出到信号线201(A)。
在时间t11处,垂直扫描电路将要输出到第二行中的像素11的信号PTXA和PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第二行中的像素11的信号A+B被输出到信号线201(B)。
在时间t12处,垂直扫描电路将要输出到第三行中的像素11的信号PTXA和信号PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第三行中的像素11的信号A+B被输出到信号线201(C)。
在时间t13处,垂直扫描电路将要输出到第四行中的像素11的信号PTXA和信号PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第四行中的像素11的信号A+B被输出到信号线201(D)。
每行中像素11的信号A+B的AD转换的操作
现在将描述信号A+B的AD转换。图18A和图18B例示了根据第一实施例至第四实施例描述的被多次执行的信号A+B的AD转换的AD转换块。
在时间t19处,MPX电路350(A)将信号线201(A)的信号(即,第一行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第一行中的像素11的信号A+B转换成数字信号。
在时间t20处,MPX电路350(A)将信号线201(B)的信号(即,第二行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第二行中的像素11的信号A+B转换成数字信号。
在时间t21处,MPX电路350(A)将信号线201(C)的信号(即,第三行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第三行中的像素11的信号A+B转换成数字信号。
在时间t22处,MPX电路350(A)将信号线201(D)的信号(即,第四行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第四行中的像素11的信号A+B转换成数字信号。
随后,垂直扫描电路将用于第五行中的像素11的信号PSEL(5)设定为高电平信号。随后,重复与以上操作相同的操作。
根据本实施例的成像设备因此能够获得基于像素的信号N的数字信号和基于像素的信号A+B的数字信号。即,成像设备获得基于有效像素13的信号N的数字信号和基于有效像素13的信号A+B的数字信号。成像设备还获得基于OB像素15的信号N的数字信号和基于OB像素15的信号A+B的数字信号。成像设备还获得基于参考像素17的信号N的数字信号和基于参考像素17的信号A+B的数字信号。OB像素15的信号A+B基于FD部分605的暗电流分量以及被遮光的光电二极管601a和光电二极管601b的电荷(主要是暗电流分量)。参考像素17的信号A+B主要基于FD部分605的暗电流分量。
随后,由ADC 360生成的数字信号经由未例示的转移信号线输出到数字信号处理电路。数字信号处理电路通过使用基于OB像素15的信号的数字信号和基于参考像素17的信号的数字信号来执行用于减小包含在基于有效像素13的信号的数字信号中的噪声分量的校正处理。
本实施例的效果
在根据本实施例的成像设备中,如参考图15所描述的,在平面图中,连接到水平OB像素区域812A的信号处理电路21与水平OB像素区域812A重叠。
假设连接到水平OB像素区域812A的信号处理电路21在平面图中不与水平OB像素区域812A重叠,而是与有效像素区域810重叠。在这种情况下,通过其发送有效像素13的信号的信号线201与水平OB像素区域812A中的信号被输入到其中的信号处理电路21重叠。在这种情况下,存在OB像素15的信号被输入到其中的连接布线170(参见图15)和有效像素13的信号被输入到其中的信号线201之间发生串扰的可能性。因此,OB像素15的信号和有效像素13的信号的准确度会降低。
但是,根据本实施例,在平面图中,连接到水平OB像素区域812A的信号处理电路21与水平OB像素区域812A重叠。因而,串扰不太可能在OB像素15的信号被输入到其中的连接布线170和有效像素13的信号被输入到其中的信号线201之间发生。因此,OB像素15的信号和有效像素13的信号的准确度不太可能降低。
成像设备的焦点检测操作及其在成像模式下的操作
图19A和图19B例示了成像设备输出焦点检测信号和成像信号的操作。
下面将主要描述与图18A和图18B中例示的操作的不同之处。
从每行中的像素11读取信号N的操作
操作与图18A和图18B中例示的操作相同。
每行中像素11的信号N的AD转换的操作
操作与图18A和图18B中例示的操作相同。
读取与每行中的像素11对应的信号A的操作
在时间t9处,垂直扫描电路将要输出到第一行中的像素11的信号PTXA设定为高电平信号。因此,光电二极管601a存储的电荷经由转移晶体管603a被转移到FD部分605。因此,FD部分605的电压与光电二极管601a的电荷对应。第一行中的像素11的信号A被输出到每列中的信号线201(A)。信号A是基于光电二极管中的一些的信号的第一信号。第一信号能够用于焦点检测。
在时间t10处,垂直扫描电路将要输出到第二行中的像素11的信号PTXA设定为高电平信号。因此,第二行中的像素11的信号A被输出到每列中的信号线201(B)。
在时间t11处,垂直扫描电路将要输出到第三行中的像素11的信号PTXA设定为高电平信号。因此,第三行中的像素11的信号A被输出到每列中的信号线201(C)。
在时间t12处,垂直扫描电路将要输出到第四行中的像素11的信号PTXA设定为高电平信号。因此,第四行中的像素11的信号A被输出到每列中的信号线201(D)。
每行中像素11的信号A的AD转换的操作
现在将描述信号A的AD转换。图19A和图19B例示了根据第四实施例描述的被多次执行的信号A的AD转换的AD转换块。
在时间t17处,MPX电路350(A)将信号线201(A)的信号(即,第一行中的像素11的信号A)输出到ADC 360(A)。ADC 360(A)将第一行中的像素11的信号A转换成数字信号。
在时间t18处,MPX电路350(A)将信号线201(B)的信号(即,第二行中的像素11的信号A)输出到ADC 360(A)。ADC 360(A)将第二行中的像素11的信号A转换成数字信号。
在时间t19处,MPX电路350(A)将信号线201(C)的信号(即,第三行中的像素11的信号A)输出到ADC 360(A)。ADC 360(A)将第三行中的像素11的信号A转换成数字信号。
在时间t20处,MPX电路350(A)将信号线201(D)的信号(即,第四行中的像素11的信号A)输出到ADC 360(A)。ADC 360(A)将第四行中的像素11的信号A转换成数字信号。
读取每行中的像素11的信号A+B的操作
在时间t18处,垂直扫描电路将要输出到第一行中的像素11的信号PTXA和PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第一行中的像素11的信号A+B被输出到信号线201(A)。
在时间t19处,垂直扫描电路将要输出到第二行中的像素11的信号PTXA和PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第二行中的像素11的信号A+B被输出到信号线201(B)。
在时间t20处,垂直扫描电路将要输出到第三行中的像素11的信号PTXA和PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第三行中的像素11的信号A+B被输出到信号线201(C)。
在时间t21处,垂直扫描电路将要输出到第四行中的像素11的信号PTXA和PTXB设定为高电平信号。因此,光电二极管601a和光电二极管601b存储的电荷经由转移晶体管603a和转移晶体管603b被转移到FD部分605。然后,第四行中的像素11的信号A+B被输出到信号线201(D)。
每行中像素11的信号A+B的AD转换的操作
在时间t26处,MPX电路350(A)将信号线201(A)的信号(即,第一行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第一行中的像素11的信号A+B转换成数字信号。
在时间t27处,MPX电路350(A)将信号线201(B)的信号(即,第二行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第二行中的像素11的信号A+B转换成数字信号。
在时间t28处,MPX电路350(A)将信号线201(C)的信号(即,第三行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第三行中的像素11的信号A+B转换成数字信号。
在时间t29处,MPX电路350(A)将信号线201(D)的信号(即,第四行中的像素11的信号A+B)输出到ADC 360(A)。ADC 360(A)将第四行中的像素11的信号A+B转换成数字信号。
随后,垂直扫描电路将用于第五行中的像素11的信号PSEL(5)设定为高电平信号。随后,重复与以上操作相同的操作。
因此,根据本实施例的成像设备能够获得基于像素的信号N的数字信号、基于像素的信号A的数字信号和基于像素的信号A+B的数字信号。
本实施例的附加效果:在图19A和图19B中的操作期间通过成像设备的并行操作来加速
在图19A和图19B中例示的操作期间,如下执行并行操作。
(1)与读取与第二行中的像素11对应的信号N并行地,读取与第一行中的像素11对应的信号N。
(2)与读取与第二行中的像素11对应的信号N并行地,执行与第一行中的像素11对应的信号N的AD转换。
(3)与读取与第一行中的像素11对应的信号A并行地,执行与第四行中的像素11对应的信号N的AD转换。
(4)与读取与第二行中的像素11对应的信号A并行地,读取与第一行中的像素11对应的信号A。
(5)与读取与第二行中的像素11对应的信号A并行地,执行与第一行中的像素11对应的信号A的AD转换。
(6)与读取与第一行中的像素11对应的信号A+B并行地,执行与第四行中的像素11对应的信号A的AD转换。
(7)与读取与第二行中的像素11对应的信号A+B并行地,读取与第一行中的像素11对应的信号A+B。
(8)与读取与第二行中的像素11对应的信号A并行地,执行与第一行中的像素11对应的信号A+B的AD转换。
以上并行操作缩短了在ADC 360(A)执行一次AD转换之后ADC 360(A)等待执行后续AD转换的时段。这缩短了从所有像素11输出的信号的AD转换所需的时段。因而,可以进一步增加成像设备的帧速率。
本实施例不限于这个示例。例如,在一个帧周期期间,可以连接包括第一颜色的滤色器的有效像素13,并且可以不连接包括用于第二颜色的滤色器的有效像素13。在解释这一点时,注意在一列中包括R和G的滤色器的有效像素13。MPX电路350将ADC 360连接到信号线201(A)和信号线201(C),包括第一颜色R的滤色器的有效像素13连接到信号线201(A)和信号线201(C)。在一个帧周期期间,MPX电路350不将ADC 360连接到包括第二颜色G的滤色器的有效像素13连接到的信号线201(B)和信号线201(D)。利用这种结构,输入到ADC 360的有效像素13的信号可以是仅与一种颜色对应的信号。这使得能够校正利用ADC 360的AD转换,并且使得能够简化AD转换之后的校正。
根据本实施例,每个信号处理电路21与一列中的像素11对应。但是,本公开不限于此。多个信号处理电路21可以与一列中的像素11对应。例如,连接到信号线201(A)和信号线201(B)的信号处理电路21可以与连接到信号线201(C)和信号线201(D)的信号处理电路21不同。像素列可以共享信号处理电路21之一。
第六实施例
图20是例示根据第六实施例的成像系统500的结构的框图。根据本实施例的成像系统500包括成像设备200,成像设备200具有与根据以上实施例描述的任何一个成像设备相同的结构。成像系统500的具体示例包括数字静态相机、数字便携式摄像机和监控相机。图20例示了数字静态相机的结构的示例,该数字静态相机包括用作根据以上实施例的任何一个成像设备的成像设备200。
图20中例示的成像系统500包括成像设备200、将物体的光学图像聚焦在成像设备200上的透镜5020、改变穿过透镜5020的光量的光阑504,以及保护透镜5020的屏障506。透镜5020和光阑504是用于将光聚焦在成像设备200上的光学系统。
成像系统500还包括处理从成像设备200输出的输出信号的信号处理单元5080。信号处理单元5080以各种方式校正输入信号并且压缩和输出用于信号处理的信号。信号处理单元5080可以具有对从成像设备200输出的输出信号执行AD转换的功能。在这种情况下,成像设备200不一定包括模数转换器。
成像系统500包括临时存储图像数据的缓冲存储器510和用于与例如外部计算机通信的外部接口(外部I/F)512。成像系统500还包括其中记录图像数据并从中读取图像数据的记录介质514(诸如半导体存储器),以及用于在记录介质514中记录图像数据并从记录介质514中读取图像数据的记录介质控制接口(记录介质控制I/F)516。记录介质514可以包含在成像系统500中并且可以是可分离的。
成像系统500还包括执行各种计算并控制整个数字静态相机的总体控制计算单元518,以及向成像设备200和信号处理单元5080输出各种定时信号的定时发生器520。定时信号可以从外部输入。成像系统500仅需要至少包括成像设备200和处理从成像设备200输出的输出信号的信号处理单元5080。总体控制计算单元518和定时发生器520可以控制成像设备200的一部分或全部。
成像设备200将图像信号输出到信号处理单元5080。信号处理单元5080以预定方式处理从成像设备200输出的图像信号,并输出图像数据。信号处理单元5080使用图像信号来生成图像。
针对成像系统使用根据以上实施例的成像设备使得成像系统能够获得具有增加的质量的图像。
第七实施例
参考图21A和图21B以及图22,描述根据第七实施例的成像系统和移动体。
图21A和图21B示意性地例示了根据本实施例的成像系统和移动体。图22是例示根据本实施例的成像系统的操作的流程图。
根据本实施例,将描述与车载相机相关的成像系统的示例。图21A和图21B例示了车辆系统和车辆系统配备的成像系统的示例。成像系统701包括成像设备702、图像预处理单元715、集成电路703和光学系统714。光学系统714将物体的光学图像聚焦在成像设备702上。成像设备702将光学系统714聚焦的物体的光学图像转换成电信号。每个成像设备702是根据以上实施例的成像设备中的任何一个。图像预处理单元715以预定方式处理从成像设备702输出的信号。成像设备702可以具有图像预处理单元715的功能。成像系统701包括光学系统714、成像设备702和图像预处理单元715中的至少两个三元组(trio)。来自每个三元组的图像预处理单元715的输出被输入到集成电路703中。
集成电路703是用在成像系统中的集成电路并且包括图像处理单元704(包括存储器705)、光学测距仪706、视差计算器707、物体识别单元708,以及异常检测器709。图像处理单元704对图像预处理单元715的输出信号执行诸如显影处理和缺陷校正处理之类的图像处理。存储器705存储图像像素的缺陷的位置并临时存储所成像的图像。光学测距仪706聚焦在物体上并测量距离。视差计算器707根据通过成像设备702获得的多条图像数据计算视差(视差图像的相位差)。物体识别单元708识别诸如汽车、道路、标志或人之类的物体。当异常检测器709检测到成像设备702的异常时,异常检测器709将关于异常的信息发送到主控制器713。
集成电路703可以利用专门设计的硬件构建,或者可以利用软件模块构建,或以上两种方式的组合。可替代地,集成电路703可以利用例如FPGA(现场可编程门阵列)、ASIC(专用集成电路)或其组合构建。
主控制器713管理并控制成像系统701、车辆传感器710、控制单元720和其它部件的操作。在可以不包括主控制器713的情况下,成像系统701、车辆传感器710和控制单元720可以各自包括通信接口,经由通信接口通过通信网络发送和接收控制信号(例如,CAN标准)。
集成电路703具有通过使用集成电路703包括的控制器或者当集成电路703从主控制器713接收控制信号时向成像设备702发送控制信号或配置的功能。例如,集成电路703发送用于成像设备702中的脉冲驱动电压开关的配置、用于每帧切换电压开关的配置或其它配置。
成像系统701连接到车辆传感器710并且能够检测正在运行的车辆的状态(诸如车辆速度、偏航率(yaw rate)、转向角度和车辆外部的环境状态)、其它车辆或障碍物的状态。车辆传感器710还用作距离信息获得单元,该单元获得关于从视差图像到物体的距离的信息。成像系统701连接到驾驶员辅助控制器711,驾驶员辅助控制器711以各种方式(诸如自动转向、自动巡航(cruising)、防止碰撞的功能)辅助驾驶员。特别地,碰撞确定单元推测车辆是否与另一个车辆或障碍物碰撞并且基于成像系统701或车辆传感器710的检测结果确定车辆是否发生碰撞。当碰撞确定单元推测车辆发生碰撞时,开启避免控制。在碰撞中,安全设备被激活。
成像系统701还连接到警报设备712,警报设备712基于碰撞确定单元的确定结果向驾驶员给出警报。例如,在碰撞确定单元已经确定存在碰撞的高可能性的情况下,主控制器713控制车辆以避免碰撞或减少损坏,例如以应用制动器、释放加速器或减少引擎输出的方式。警报设备712向用户给出警报,例如以响起警报、在例如汽车导航系统或仪表板的屏幕上显示警报信息或者振动安全带(sheet belt)或方向盘的方式。
根据本实施例,成像系统701拍摄车辆周围(例如,车辆的前部或后部)的图片。图21B例示了在成像系统701拍摄车辆前部的图片的情况下成像系统701的布置的示例。
两个成像设备702部署在车辆700的前部。具体而言,两个成像设备702相对于对称轴彼此对称地部署,该对称轴与在车辆700向前或向后行驶的方向上延伸的中心线或者外部形状(例如,车辆的宽度)的中心线重合。这在获得关于车辆700与物体之间的距离的信息或确定碰撞的可能性时是优选的。成像设备702优选地部署在当驾驶员从驾驶员座位观察车辆700的外部情形时驾驶员的视野不被阻挡的位置处。警报设备712优选地部署在驾驶员容易看到警报设备712的位置。
现在将参考图22描述成像系统701的成像设备702的故障检测操作。成像设备702的故障检测操作通过图22中例示的步骤S810至步骤S880来执行。
步骤S810是在启动处理期间设定成像设备702的配置的步骤。即,从成像系统701的外部(例如,主控制器713)或成像系统701的内部发送用于成像设备702的操作的配置,并且启动成像设备702的成像操作和故障检测操作。
随后,在步骤S820处,从有效像素获得像素信号。在步骤S830处,从用于检测故障的像素获得输出。用于检测故障的像素包括有效像素中的相应光电转换器。预定量值的电压被施加到光电转换器。用于检测故障的像素输出与施加到光电转换器的电压对应的信号。可以颠倒步骤S820和步骤S830的次序。
随后,在步骤S840处,确定用于检测故障的像素的输出的预期值是否与来自用于检测故障的像素的实际输出匹配。
当在步骤S840处输出的预期值与实际输出匹配时,处理步骤前进到步骤S850,在步骤S850中进行成像操作正常的确定,并且处理步骤前进到步骤S860。在步骤S860处,扫描行中的像素信号被发送到存储器705,以临时存储在存储器705中。随后,处理步骤返回到步骤S820,并且继续故障检测操作。
当在步骤S840处输出的预期值与实际输出不匹配时,处理步骤前进到步骤S870。在步骤S870处,进行成像操作异常的确定,并且向主控制器713或警报设备712给出警报。警报设备712在屏幕上显示异常的检测。随后,在步骤S880处,停止成像设备702,并且完成成像系统701的操作。
在根据本实施例描述的示例中,每行循环流程图。但是,可以关于多行来循环该流程图。可以每帧执行故障检测操作。
在步骤S870处,可以经由无线网络将警报给予车辆外部。
根据本实施例描述的控制用于避免与另一个车辆的碰撞。本实施例可以被用于控制自动驾驶以跟随另一个车辆或控制自动驾驶以防止车辆离开车道。成像系统701不限于诸如汽车之类的车辆,并且可以用于诸如船舶、飞行器或工业机器人之类的移动体(移动设备)。除了移动体之外,成像系统701还可以用于用于在宽范围中识别物体的仪器,诸如智能运输系统(ITS)。
修改
本公开不限于以上实施例。可以进行各种修改。
例如,本公开的实施例包括以上实施例之一的一部分和另一个实施例的组合的实施例,以及以上实施例之一的一部分被另一个实施例的一部分替换。
通过示例的方式描述了以上实施例以执行本公开。本公开的技术范围不由于以上实施例而被解释为在有限范围内。即,在不脱离技术概念或主要特征的情况下,本公开可以作为各种实施例被执行。
根据本公开,能够提供一种能够执行信号的第二次AD转换和相继的AD转换的逐次逼近型模数转换器。
虽然已经参考示例性实施例描述了本公开,但是应当理解的是,本公开不限于所公开的示例性实施例。所附权利要求的范围应当被赋予最广泛的解释,以涵盖所有此类修改以及等同的结构和功能。
Claims (16)
1.一种逐次逼近型模数转换器,其特征在于,该逐次逼近型模数转换器将模拟信号转换成N位数字信号,其中N是2或更大的整数,该逐次逼近型模数转换器包括:
比较器,接收模拟信号和比较信号作为输入;
第一数模转换器,将比较信号转换成与N位中的每一位对应的电压;
第二数模转换器,包括将与N位中的低n位对应的偏移施加于比较信号的偏移单元;以及
控制器,使比较器在模拟信号与第一数模转换器转换成电压的施加有偏移的比较信号之间执行多次比较,
其中由偏移单元施加到比较信号的偏移的量在所述多次比较中的每一次比较中是相同的量。
2.根据权利要求1所述的逐次逼近型模数转换器,
其中第一数模转换器和第二数模转换器各自包括电容器元件和连接到电容器元件的开关,以及
其中公共电压施加到第一数模转换器的电容器元件和第二数模转换器的电容器元件。
3.根据权利要求1所述的逐次逼近型模数转换器,
其中获得与包含在模拟信号中的噪声分量对应的数字信号值,并且偏移是与大于该数字信号值的数字信号对应的电压。
4.根据权利要求1所述的逐次逼近型模数转换器,还包括:
放大器,以从不同增益值中选择的增益值放大输入的信号,并将放大的信号作为模拟信号输出到逐次逼近型模数转换器,
其中,当放大器以增益值中的第一增益值放大输入的信号时,偏移是与第一位数对应的电压,以及
其中,当放大器以增益值中大于第一增益值的第二增益值放大输入的信号时,偏移是与大于第一位数的第二位数对应的电压。
5.一种成像设备,其特征在于,包括:
根据权利要求1所述的逐次逼近型模数转换器;以及
像素,所述像素中的每个像素输出像素信号,
其中逐次逼近型模数转换器使用像素信号作为用于AD转换的模拟信号。
6.根据权利要求5所述的成像设备,
其中所述像素中的每个像素输出基于一些光电转换器的电荷的第一信号以及基于所有光电转换器的电荷的第二信号,
其中逐次逼近型模数转换器将第一信号转换成数字信号至少两次,并将第二信号转换成数字信号至少两次,以及
其中当第一信号被第二次转换时的位数低于当第二信号被第二次转换时的位数。
7.根据权利要求6所述的成像设备,
其中所述像素中的每个像素输出噪声信号,该噪声信号是处于噪声电平的信号,
其中逐次逼近型模数转换器将噪声信号转换成数字信号至少两次,以及
其中当噪声信号被第二次转换时的位数低于当第一信号被第二次转换时的位数。
8.根据权利要求5所述的成像设备,
其中第一芯片包括像素,第二芯片包括逐次逼近型模数转换器,并且第一芯片和第二芯片堆叠。
9.根据权利要求8所述的成像设备,
其中第一芯片还包括被遮光的像素,该被遮光的像素包括被遮光的光电转换器,以及
其中被遮光的像素和逐次逼近型模数转换器在平面图中重叠。
10.一种成像设备,其特征在于,包括:
像素,所述像素中的每个像素包括光电转换器;以及
逐次逼近型模数转换器,
其中所述像素中的每个像素输出基于一些光电转换器的电荷的第一信号以及基于所有光电转换器的电荷的第二信号,
其中逐次逼近型模数转换器将第一信号转换成数字信号至少两次,并将第二信号转换成数字信号至少两次,以及
其中当第一信号被第二次转换时的位数低于当第二信号被第二次转换时的位数。
11.根据权利要求10所述的成像设备,
其中所述像素中的每个像素输出噪声信号,该噪声信号是处于噪声电平的信号,
其中逐次逼近型模数转换器将噪声信号转换成数字信号至少两次,以及
其中当噪声信号被第二次转换时的位数低于当第一信号被第二次转换时的位数。
12.根据权利要求10所述的成像设备,
其中第一芯片包括像素,第二芯片包括逐次逼近型模数转换器,并且第一芯片和第二芯片堆叠。
13.根据权利要求12所述的成像设备,
其中第一芯片还包括被遮光的像素,该被遮光的像素包括被遮光的光电转换器,以及
其中被遮光的像素和逐次逼近型模数转换器在平面图中重叠。
14.一种成像系统,其特征在于,包括:
根据权利要求5所述的成像设备;以及
信号处理单元,该信号处理单元处理从成像设备输出的信号以生成图像。
15.一种成像系统,其特征在于,包括:
根据权利要求10所述的成像设备;以及
信号处理单元,该信号处理单元处理从成像设备输出的信号以生成图像。
16.一种移动体,其特征在于,包括:
根据权利要求5至13中任一项所述的成像设备;
距离信息获得单元,基于从成像设备到物体的信号来获得关于距视差图像的距离的信息;以及
控制单元,基于关于距离的信息来控制移动体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-192054 | 2017-09-29 | ||
| JP2017192054A JP7039236B2 (ja) | 2017-09-29 | 2017-09-29 | 逐次比較型ad変換器、撮像装置、撮像システム、移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109587416A CN109587416A (zh) | 2019-04-05 |
| CN109587416B true CN109587416B (zh) | 2021-12-10 |
Family
ID=65898155
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811143657.8A Active CN109587416B (zh) | 2017-09-29 | 2018-09-29 | 逐次逼近型模数转换器、成像设备、成像系统以及移动体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10742910B2 (zh) |
| JP (2) | JP7039236B2 (zh) |
| CN (1) | CN109587416B (zh) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10686996B2 (en) | 2017-06-26 | 2020-06-16 | Facebook Technologies, Llc | Digital pixel with extended dynamic range |
| US10419701B2 (en) | 2017-06-26 | 2019-09-17 | Facebook Technologies, Llc | Digital pixel image sensor |
| US10598546B2 (en) | 2017-08-17 | 2020-03-24 | Facebook Technologies, Llc | Detecting high intensity light in photo sensor |
| US10764526B1 (en) * | 2017-11-01 | 2020-09-01 | Facebook Technologies, Llc | Spatial derivative pixel array with adaptive quantization |
| US11393867B2 (en) | 2017-12-06 | 2022-07-19 | Facebook Technologies, Llc | Multi-photodiode pixel cell |
| US10969273B2 (en) | 2018-03-19 | 2021-04-06 | Facebook Technologies, Llc | Analog-to-digital converter having programmable quantization resolution |
| US11004881B2 (en) | 2018-04-03 | 2021-05-11 | Facebook Technologies, Llc | Global shutter image sensor |
| US11089210B2 (en) | 2018-06-11 | 2021-08-10 | Facebook Technologies, Llc | Configurable image sensor |
| US11906353B2 (en) | 2018-06-11 | 2024-02-20 | Meta Platforms Technologies, Llc | Digital pixel with extended dynamic range |
| US11089241B2 (en) | 2018-06-11 | 2021-08-10 | Facebook Technologies, Llc | Pixel cell with multiple photodiodes |
| US11463636B2 (en) | 2018-06-27 | 2022-10-04 | Facebook Technologies, Llc | Pixel sensor having multiple photodiodes |
| US10897586B2 (en) | 2018-06-28 | 2021-01-19 | Facebook Technologies, Llc | Global shutter image sensor |
| JP7316028B2 (ja) * | 2018-08-01 | 2023-07-27 | キヤノン株式会社 | 撮像素子及びその制御方法、及び撮像装置 |
| US10931884B2 (en) | 2018-08-20 | 2021-02-23 | Facebook Technologies, Llc | Pixel sensor having adaptive exposure time |
| US11956413B2 (en) | 2018-08-27 | 2024-04-09 | Meta Platforms Technologies, Llc | Pixel sensor having multiple photodiodes and shared comparator |
| US11595602B2 (en) | 2018-11-05 | 2023-02-28 | Meta Platforms Technologies, Llc | Image sensor post processing |
| US11102430B2 (en) | 2018-12-10 | 2021-08-24 | Facebook Technologies, Llc | Pixel sensor having multiple photodiodes |
| US11218660B1 (en) | 2019-03-26 | 2022-01-04 | Facebook Technologies, Llc | Pixel sensor having shared readout structure |
| US11943561B2 (en) | 2019-06-13 | 2024-03-26 | Meta Platforms Technologies, Llc | Non-linear quantization at pixel sensor |
| US11165435B2 (en) * | 2019-10-08 | 2021-11-02 | Tron Future Tech Inc. | Signal converting apparatus |
| US11936998B1 (en) | 2019-10-17 | 2024-03-19 | Meta Platforms Technologies, Llc | Digital pixel sensor having extended dynamic range |
| US11902685B1 (en) | 2020-04-28 | 2024-02-13 | Meta Platforms Technologies, Llc | Pixel sensor having hierarchical memory |
| US11910114B2 (en) | 2020-07-17 | 2024-02-20 | Meta Platforms Technologies, Llc | Multi-mode image sensor |
| JP7446182B2 (ja) * | 2020-08-26 | 2024-03-08 | 東京エレクトロン株式会社 | 基板処理装置及びノイズ影響低減方法 |
| US11956560B2 (en) | 2020-10-09 | 2024-04-09 | Meta Platforms Technologies, Llc | Digital pixel sensor having reduced quantization operation |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11154866A (ja) * | 1997-11-19 | 1999-06-08 | Nec Corp | 逐次比較型ad変換器 |
| US6885396B1 (en) * | 1998-03-09 | 2005-04-26 | Micron Technology, Inc. | Readout circuit with gain and analog-to-digital a conversion for image sensor |
| JP2000269814A (ja) | 1999-03-18 | 2000-09-29 | Toshiba Microelectronics Corp | アナログ/ディジタル変換回路 |
| JP4389959B2 (ja) | 2007-04-23 | 2009-12-24 | ソニー株式会社 | 固体撮像装置、固体撮像装置の信号処理方法および撮像装置 |
| JP4921255B2 (ja) | 2007-06-22 | 2012-04-25 | ルネサスエレクトロニクス株式会社 | 逐次型ad変換器 |
| US7876371B2 (en) * | 2008-03-31 | 2011-01-25 | Aptina Imaging Corporation | Systems and methods to perform digital correlated double sampling using successive approximation analog to digital conversion techniques |
| JP2010063055A (ja) * | 2008-09-08 | 2010-03-18 | Sony Corp | 逐次比較型a/d変換器、逐次比較型a/d変換器の制御方法、固体撮像装置および撮像装置 |
| JP5440758B2 (ja) | 2009-05-07 | 2014-03-12 | セイコーエプソン株式会社 | A/d変換回路、電子機器及びa/d変換方法 |
| EP2421155B1 (en) * | 2010-08-02 | 2013-07-03 | Fraunhofer-Gesellschaft zur Förderung der Angewandten Forschung e.V. | A hybrid analog-to-digital converter, an image sensor and a method for providing a plurality of ditigal signals |
| JP5589780B2 (ja) | 2010-11-08 | 2014-09-17 | セイコーエプソン株式会社 | A/d変換回路、電子機器及びa/d変換方法 |
| JP5263268B2 (ja) | 2010-11-10 | 2013-08-14 | ソニー株式会社 | 逐次比較型a/d変換器および固体撮像装置 |
| JP2012151561A (ja) | 2011-01-17 | 2012-08-09 | Seiko Epson Corp | A/d変換回路、集積回路装置及び電子機器 |
| JP6136097B2 (ja) | 2012-03-30 | 2017-05-31 | セイコーエプソン株式会社 | A/d変換回路及び電子機器 |
| US8933385B2 (en) * | 2012-07-06 | 2015-01-13 | Omnivision Technologies, Inc. | Hybrid analog-to-digital converter having multiple ADC modes |
| US8659461B1 (en) * | 2012-11-13 | 2014-02-25 | University Of Macau | Analog to digital converter circuit |
| CN103178855B (zh) * | 2013-03-26 | 2016-04-13 | 天津大学 | 应用于高精度逐次逼近模数转换器的三段式电容阵列结构 |
| JP2015023391A (ja) | 2013-07-18 | 2015-02-02 | 株式会社ニコン | 固体撮像装置 |
| JP6480712B2 (ja) | 2014-02-06 | 2019-03-13 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP2015198273A (ja) | 2014-03-31 | 2015-11-09 | ソニー株式会社 | イメージセンサ、およびイメージセンサの動作方法、撮像装置および撮像方法、並びに電子機器 |
| CN104124973A (zh) * | 2014-08-11 | 2014-10-29 | 东南大学 | 一种逐次逼近型模数转换器及其转换方法 |
| CN204652351U (zh) * | 2015-07-07 | 2015-09-16 | 杭州士兰微电子股份有限公司 | 逐次逼近模数转换器 |
| JP6666043B2 (ja) | 2015-09-10 | 2020-03-13 | キヤノン株式会社 | 撮像装置及び撮像システム |
| US10003761B2 (en) * | 2015-09-10 | 2018-06-19 | Canon Kabushiki Kaisha | Imaging device having multiple analog-digital conversion circuits that perform multiple ad conversions for a singular one of a pixel signal |
| CN205510016U (zh) * | 2015-12-31 | 2016-08-24 | 杭州士兰微电子股份有限公司 | 逐次逼近模数转换器和传感信号处理装置 |
| JP6957162B2 (ja) | 2016-03-04 | 2021-11-02 | キヤノン株式会社 | 測距装置及び移動体 |
| CN105933004B (zh) * | 2016-04-15 | 2019-04-30 | 北京大学(天津滨海)新一代信息技术研究院 | 一种高精度电容自校准逐次逼近型模数转换器 |
| US10291251B1 (en) * | 2018-09-21 | 2019-05-14 | Semiconductor Components Industries, Llc | Imaging systems with sub-radix-2 charge sharing successive approximation register (SAR) analog-to-digital converters |
-
2017
- 2017-09-29 JP JP2017192054A patent/JP7039236B2/ja active Active
-
2018
- 2018-09-26 US US16/143,115 patent/US10742910B2/en active Active
- 2018-09-29 CN CN201811143657.8A patent/CN109587416B/zh active Active
-
2022
- 2022-03-09 JP JP2022036299A patent/JP7342173B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10742910B2 (en) | 2020-08-11 |
| JP7342173B2 (ja) | 2023-09-11 |
| JP2019068268A (ja) | 2019-04-25 |
| CN109587416A (zh) | 2019-04-05 |
| JP2022084730A (ja) | 2022-06-07 |
| US20190104265A1 (en) | 2019-04-04 |
| JP7039236B2 (ja) | 2022-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109587416B (zh) | 逐次逼近型模数转换器、成像设备、成像系统以及移动体 | |
| JP6929750B2 (ja) | 撮像装置、撮像システム、移動体 | |
| US11496704B2 (en) | Photoelectric conversion device having select circuit with a switch circuit having a plurality of switches, and imaging system | |
| CN110291785B (zh) | 图像传感器、控制图像传感器的方法及电子设备 | |
| WO2019146443A1 (ja) | Dac回路、固体撮像素子、および、電子機器 | |
| CN109429023B (zh) | 成像装置、成像系统和移动体 | |
| US11070755B2 (en) | Imaging device and signal processing device | |
| WO2019163511A1 (ja) | 撮像装置、撮像システム、および撮像方法 | |
| US20220201233A1 (en) | Photoelectric conversion device and imaging system | |
| JP2019068266A (ja) | 撮像装置、撮像システム、移動体、回路チップ | |
| JP2019102948A (ja) | 撮像装置、撮像システム、移動体 | |
| CN115942133A (zh) | 光检测装置和电子设备 | |
| JP7102159B2 (ja) | 光電変換装置、撮像システム、および、移動体 | |
| US11671728B2 (en) | Sensing device, electronic apparatus, and method for controlling sensing device | |
| CN109587454B (zh) | 成像装置、成像系统、移动物体和电路芯片 | |
| JP6991815B2 (ja) | 撮像装置、撮像システム、移動体 | |
| WO2022097445A1 (ja) | 固体撮像装置および電子機器 | |
| US11700465B2 (en) | Solid-state imaging element, imaging device, and solid-state imaging element control method | |
| US10834348B2 (en) | Imaging sensor, chip, imaging system, and moving body | |
| CN115516850A (zh) | 成像装置和电子设备 | |
| CN113169742B (zh) | 摄像装置和摄像系统 | |
| WO2024042896A1 (ja) | 光検出素子および電子機器 | |
| US20230247328A1 (en) | Imaging device and electronic device | |
| CN116249025A (zh) | 光电转换装置 | |
| JP2023110120A (ja) | 撮像装置及び電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |