CN107186108B - 一种应用于多工位冲压模具的模内机械手装置 - Google Patents
一种应用于多工位冲压模具的模内机械手装置 Download PDFInfo
- Publication number
- CN107186108B CN107186108B CN201710261565.9A CN201710261565A CN107186108B CN 107186108 B CN107186108 B CN 107186108B CN 201710261565 A CN201710261565 A CN 201710261565A CN 107186108 B CN107186108 B CN 107186108B
- Authority
- CN
- China
- Prior art keywords
- sliding table
- manipulator
- arm
- stamping die
- horizontal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D43/00—Feeding, positioning or storing devices combined with, or arranged in, or specially adapted for use in connection with, apparatus for working or processing sheet metal, metal tubes or metal profiles; Associations therewith of cutting devices
- B21D43/02—Advancing work in relation to the stroke of the die or tool
- B21D43/18—Advancing work in relation to the stroke of the die or tool by means in pneumatic or magnetic engagement with the work
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0608—Gripping heads and other end effectors with vacuum or magnetic holding means with magnetic holding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
- B25J15/0683—Details of suction cup structure, e.g. grooves or ridges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/007—Arms the end effector rotating around a fixed point
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Abstract
本发明涉及一种应用于多工位冲压模具的模内机械手装置,包括一可水平滑动和垂直滑动的滑台,所述滑台上连接有多个机械手手臂,所述机械手手臂前端设置有吸附装置用于吸附工件,通过多机械手的配合,使工作效率大大提升,同时,每个机械手手臂还能进行自我旋转,使该机械手手臂既可以吸附位于机械手手臂上方的工件同时也可以吸附位于机械手手臂下方的工件,增加了该机械手装置的适应性,从而当应用于新的冲压模具时不需要去更换机械手装置,从而减小了成本。
Description
技术领域
本发明涉及多工位冲压模模具技术领域,具体涉及一种应用于多工位冲压模具的模内机械手装置。
背景技术
冲压生产工艺因其无切屑而成形备受企业青睐,各种冲压企业大量使用冲床加工生产产品,早期使用的冲床结构简单,成本低廉,需要工作人员来进行取放工件,但由于工作人员疏忽或者疲劳导致冲压伤手等的人身事故时有发生,在现有冲压模具中应用模内机械手不仅可以提高生产的自动化水平和劳动生产率,而且可以减轻劳动强度、保证产品质量、实现安全生产,可以大大增加企业效益,因此得到越来越广泛的使用。
现有的模内机械手只能针对于一个工位进行取放工件,而随着生产的需求,现有的冲压模具都包含多个工位,因此需要一种能够适应多个工位的模内机械手来提高整体的冲压效率。
发明内容
本发明针对现有技术中的上述缺点进行改进,提供一种应用于多工位冲压模具的模内机械手装置,通过多个模内机械手配合来完成在多工位冲压模具中的自动取放工件工作,提高自动化程度,从而提高了生产效率。
为实现上述目的,本发明提供如下技术方案:一种应用于多工位冲压模具的模内机械手装置,包括底板,所述底板上设置有一水平轨道,所述水平轨道上设置有一滑动机构,所述滑动机构包括一箱体及一可在所述水平轨道上水平滑动的滑台,其中,所述箱体包括与所述水平轨道平行的两块侧板及设置于所述侧板上方的上板,所述侧板上设置有垂直轨道,所述滑台可在所述垂直轨道上上下滑动,所述滑台还与一水平电机和一垂直电机相连,其中,所述水平电机用于驱动所述滑台在水平轨道上滑动,所述垂直电机用于驱动所述滑台在垂直轨道上滑动,同时,所述滑台两侧伸出所述箱体,两侧的伸出部分分别连接有一机械手臂固定板,所述机械手臂固定板连接有一横杆,所述横杆上设置有若干根机械手手臂,所述机械手手臂上前端设置有吸附装置以用于吸附工件。
进一步的,所述水平电机安装于所述滑台的侧面,所述垂直电机安装于所述上板上。
进一步的,所述滑台上两侧分别设置有手臂压块,通过所述手臂压块将所述机械手臂固定板固定于所述滑台上。
进一步的,所述滑台与所述水平轨道和垂直轨道之间均设置有导轨垫块。
进一步的,还包括接近开关传感器,所述接近开关传感器设置于所述上板上或设置于所述滑台上。
进一步的,所述吸附装置为气动吸盘或磁吸附装置。
进一步的,所述机械手手臂至少包括4根。
进一步的,所述机械手手臂分为前段和后段,所述前段上设置有吸附装置,同时,在所述连接处设置有一旋转电机,所述旋转电机用于驱动所述机械手手臂前段进行360°旋转。
进一步的,所述机械手手臂上设置有对位装置,所述对位装置用于判断所述机械手手臂是否到达所需要的位置。
本发明与现有技术相比,本发明的有益效果是:
改变了现有技术中模内机械手只能针对一个工位进行取放件的缺点,通过多机械手的配合,使工作效率大大提升,同时,每个机械手手臂还能进行自我旋转,使该机械手手臂既可以吸附位于机械手手臂上方的工件同时也可以吸附位于机械手手臂下方的工件,增加了该机械手装置的适应性,从而当应用于新的冲压模具时不需要去更换机械手装置,从而减小了成本。
附图说明
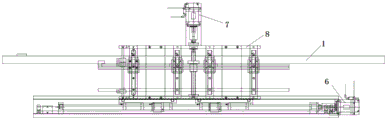
图1为所述模内机械手装置的顶视图;
图2为所述模内机械手装置的正视图;
附图标记:1-滑台,2-机械手臂固定板,3-横杆,4-机械手手臂,5-吸附装置,6-水平电机,7-垂直电机,8-上板,9-底板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-2所示,本发明提供如下技术方案:一种应用于多工位冲压模具的模内机械手装置,包括底板9,所述底板9上设置有一水平轨道,所述水平轨道上设置有一滑动机构,所述滑动机构包括一箱体及一可在所述水平轨道上水平滑动的滑台1,其中,所述箱体包括与所述水平轨道平行的两块侧板及设置于所述侧板上方的上板8,所述侧板上设置有垂直轨道,所述滑台1可在所述垂直轨道上上下滑动,所述滑台1还与一水平电机6和一垂直电机7相连,其中,所述水平电机6用于驱动所述滑台1在水平轨道上滑动,所述垂直电机7用于驱动所述滑台1在垂直轨道上滑动,同时,所述滑台1两侧伸出所述箱体,两侧的伸出部分分别连接有一机械手臂固定板,所述机械手臂固定板连接有一横杆,所述横杆上设置有若干根机械手手臂,所述机械手手臂4上前端设置有吸附装置5以用于吸附工件。
进一步的,所述水平电机6安装于所述滑台的侧面,所述垂直电机7安装于所述上板8上。
进一步的,所述滑台1上两侧分别设置有手臂压块,通过所述手臂压块将所述机械手臂固定板2固定于所述滑台1上。
进一步的,所述滑台1与所述水平轨道和垂直轨道之间均设置有导轨垫块。
进一步的,还包括接近开关传感器,所述接近开关传感器设置于所述上板8上或设置于所述滑台1上。
进一步的,所述吸附装置5为气动吸盘或磁吸附装置。
进一步的,所述机械手手臂4至少包括4根。
进一步的,所述机械手手臂4分为前段和后段,所述前段上设置有吸附装置,同时,在所述连接处设置有一旋转电机,所述旋转电机用于驱动所述机械手手臂前段进行360°旋转。
进一步的,所述机械手手臂4上设置有对位装置,所述对位装置用于判断所述机械手手臂4是否到达所需要的位置,当所述机械手手臂随滑台开始运行过程中,所述对位装置会实时进行检测所述机械手手臂4是否达到所需要的位置,如果没有达到所需要的位置,所述滑台会继续进行滑动,而到达后,则会发出信号使所述滑台停止滑动。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
Claims (6)
1.一种应用于多工位冲压模具的模内机械手装置,包括底板,所述底板上设置有一水平轨道,所述水平轨道上设置有一滑动机构,所述滑动机构包括一箱体及一可在所述水平轨道上水平滑动的滑台,其中,所述箱体包括与所述水平轨道平行的两块侧板及设置于所述侧板上方的上板,所述侧板上设置有垂直轨道,所述滑台可在所述垂直轨道上上下滑动,所述滑台还与一水平电机和一垂直电机相连,其中,所述水平电机用于驱动所述滑台在水平轨道上滑动,所述垂直电机用于驱动所述滑台在垂直轨道上滑动,同时,所述滑台两侧伸出所述箱体,两侧的伸出部分分别连接有一机械手臂固定板,所述机械手臂固定板连接有一横杆,所述横杆上设置有若干根机械手手臂,所述机械手手臂上前端设置有吸附装置以用于吸附工件;还包括接近开关传感器,所述接近开关传感器设置于所述上板上或设置于所述滑台上;所述机械手手臂分为前段和后段,所述前段上设置有吸附装置,同时,在所述前段和后段的连接处设置有一旋转电机,所述旋转电机用于驱动所述机械手手臂前段进行360°旋转,并且所述机械手手臂上设置有对位装置,所述对位装置用于判断所述机械手手臂是否到达所需要的位置。
2.根据权利要求1所述的一种应用于多工位冲压模具的模内机械手装置,其特征在于:所述水平电机安装于所述滑台的侧面,所述垂直电机安装于所述上板上。
3.根据权利要求1所述的一种应用于多工位冲压模具的模内机械手装置,其特征在于:所述滑台上两侧分别设置有手臂压块,通过所述手臂压块将所述机械手臂固定板固定于所述滑台上。
4.根据权利要求1所述的一种应用于多工位冲压模具的模内机械手装置,其特征在于:所述滑台与所述水平轨道和垂直轨道之间均设置有导轨垫块。
5.根据权利要求1所述的一种应用于多工位冲压模具的模内机械手装置,其特征在于:所述吸附装置为气动吸盘或磁吸附装置。
6.根据权利要求1所述的一种应用于多工位冲压模具的模内机械手装置,其特征在于:所述机械手手臂至少包括4根。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710261565.9A CN107186108B (zh) | 2017-04-20 | 2017-04-20 | 一种应用于多工位冲压模具的模内机械手装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710261565.9A CN107186108B (zh) | 2017-04-20 | 2017-04-20 | 一种应用于多工位冲压模具的模内机械手装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107186108A CN107186108A (zh) | 2017-09-22 |
| CN107186108B true CN107186108B (zh) | 2020-01-21 |
Family
ID=59871885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710261565.9A Active CN107186108B (zh) | 2017-04-20 | 2017-04-20 | 一种应用于多工位冲压模具的模内机械手装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107186108B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110227767B (zh) * | 2019-06-27 | 2024-07-02 | 乐清市小林模具科技有限公司 | 接线鼻自动成型模 |
| CN111319059B (zh) * | 2020-03-05 | 2023-04-18 | 杭州亚太智能装备有限公司 | 用于模具浇口过滤网取放的六轴机械臂用机械手及其操作方法 |
| CN114042795A (zh) * | 2021-11-26 | 2022-02-15 | 东莞市正翔金属科技有限公司 | 一种多次冲压金属物过热冷却系统 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102601255B (zh) * | 2012-02-24 | 2014-08-13 | 丰顺县培英电声有限公司 | 一种汽车音响五金件冲压自动化上下料机械手 |
| CN102717003B (zh) * | 2012-03-23 | 2014-10-22 | 顺德职业技术学院 | 多工位传递模冲压加工的自动取送料机械手 |
| CN203409057U (zh) * | 2013-08-12 | 2014-01-29 | 米亚精密金属科技(东莞)有限公司 | 一种全自动数控冲床 |
| CN203556763U (zh) * | 2013-10-14 | 2014-04-23 | 广东顺德劳佰得机器人科技有限公司 | 一种高速精密冲床快速送取料装置 |
| CN103611837B (zh) * | 2013-12-13 | 2015-11-04 | 广东凌丰集团股份有限公司 | 一种金属圆锅自动切边送料取料装置 |
| CN103707296B (zh) * | 2013-12-31 | 2015-11-11 | 哈尔滨工业大学 | 一种用于抓取钣金件的四轴机械手 |
| CN204322079U (zh) * | 2014-12-04 | 2015-05-13 | 深圳华阳宇光汽车配件有限公司 | 五金模内机械手 |
| CN104826955B (zh) * | 2015-04-02 | 2016-08-24 | 创美工艺(常熟)有限公司 | 冲床内置式多工位移模机械手 |
| CN204867161U (zh) * | 2015-08-14 | 2015-12-16 | 深圳市德富莱自动化设备有限公司 | 五轴冲压机械手 |
| CN106541042A (zh) * | 2015-09-23 | 2017-03-29 | 任思旭 | 薄片零件冲压加工上下料机械手臂系统 |
| CN205289523U (zh) * | 2015-11-24 | 2016-06-08 | 东莞川石自动化科技有限公司 | 模内多工位机械手 |
| CN206824549U (zh) * | 2017-04-20 | 2018-01-02 | 常熟市杜尼电子有限责任公司 | 一种应用于多工位冲压模具的模内机械手装置 |
-
2017
- 2017-04-20 CN CN201710261565.9A patent/CN107186108B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107186108A (zh) | 2017-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN204135219U (zh) | 自动翻转台 | |
| CN204053663U (zh) | 一种卧式平面磨床机械手 | |
| CN205200561U (zh) | 一种双翼双臂式上下料机械手装置 | |
| CN107186108B (zh) | 一种应用于多工位冲压模具的模内机械手装置 | |
| CN112427965B (zh) | 一种改进型金属簸箕生产线及其周边折弯模具的加工方法 | |
| CN208555772U (zh) | 一种冲压气瓶顶盖的装置 | |
| CN204308084U (zh) | 自动冲床 | |
| CN203508830U (zh) | 滤清器壳体自动拉伸输送上下左右运动机构 | |
| CN204585884U (zh) | 一种新型加工平台 | |
| CN105522571A (zh) | 一种自动化冲压机械手 | |
| CN204914370U (zh) | 一种塑胶件浇口铣削及整形一体化装置 | |
| CN207273230U (zh) | 一种电路板自动抓取机器人 | |
| CN211101397U (zh) | 一种用于弯链板自动化生产的多工位自动送料装置 | |
| CN111545669A (zh) | 一种货车高摩闸瓦瓦背自动生产线 | |
| CN206824549U (zh) | 一种应用于多工位冲压模具的模内机械手装置 | |
| CN202683822U (zh) | 一种机械手装置 | |
| CN205685114U (zh) | 一种多工位机械手输送装置 | |
| CN203691186U (zh) | 一种电机端盖自动质检生产设备 | |
| CN110142346B (zh) | 一种冲压设备用自动取件放件装置 | |
| CN211683688U (zh) | 一种送料装置及具有其的热压整型系统 | |
| CN204094124U (zh) | 汽车转向节铸件的清理和检测机构 | |
| CN115026863B (zh) | 一种自动夹紧移动机械臂装置 | |
| CN108519389B (zh) | 基于机器视觉的冲压件表面缺陷检测装置及方法 | |
| CN110899474A (zh) | 一种改进的自动化冲孔设备 | |
| CN206969694U (zh) | 一种自动下料机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |