CN1043201C - 采用特性值简单运算起动的乘员保护系统 - Google Patents
采用特性值简单运算起动的乘员保护系统 Download PDFInfo
- Publication number
- CN1043201C CN1043201C CN95117640A CN95117640A CN1043201C CN 1043201 C CN1043201 C CN 1043201C CN 95117640 A CN95117640 A CN 95117640A CN 95117640 A CN95117640 A CN 95117640A CN 1043201 C CN1043201 C CN 1043201C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- value
- external force
- vector
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 49
- 230000009471 action Effects 0.000 claims description 19
- 230000010354 integration Effects 0.000 claims description 9
- 238000000605 extraction Methods 0.000 claims description 5
- 238000004364 calculation method Methods 0.000 abstract description 6
- 230000000452 restraining effect Effects 0.000 abstract 2
- 230000002194 synthesizing effect Effects 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 29
- 238000000034 method Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 3
- 230000036316 preload Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000003252 repetitive effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 230000034994 death Effects 0.000 description 1
- 231100000517 death Toxicity 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000007634 remodeling Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/02—Occupant safety arrangements or fittings, e.g. crash pads
- B60R21/16—Inflatable occupant restraints or confinements designed to inflate upon impact or impending impact, e.g. air bags
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R21/01332—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis
- B60R21/01338—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value by frequency or waveform analysis using vector analysis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Air Bags (AREA)
- Automotive Seat Belt Assembly (AREA)
- Professional, Industrial, Or Sporting Protective Garments (AREA)
Abstract
车辆用乘员保护系统,车辆受到外力时,车辆产生加速度,乘员保护系统包括:保护装置,用于保护外力超过预定值时车辆中的乘员;外力假定装置,用于假定车辆所受外力的大小和方向;投影值计算装置,用于计算与外力相适应的外力矢量得出的投影矢量投影值,外力矢量由外力假定装置假定的量值和方向求出,投影矢量为外力矢量相对于预定方向的投影;动作确定装置,用于确定保护装置的起动,通过投影值与预定阈值的比较,使得在投影值大于预定阈值时保护装置动作。
Description
本发明一般涉及车辆的乘员保护系统,尤其是涉及车辆的加速度超过预定值时,保护车辆内乘员的乘员保护系统。
车辆使用的乘员保护系统,如保险气袋或安全带预载器,在工程技术中,人所共知。当车辆的加速度超过预定值时,起动这种系统,将乘员限制,靠在其座位上。乘员保护系统动作时,乘员保持在合适的位置。
只有在乘员真正需要保护时,乘员保护系统,如保险气袋才应起动。当乘员不能自行保持其位置时,乘员必须得到保护的情况才会出现。巨大的外力作用在行驶方向的车辆上会出现这种情况。
此外,从车辆侧面发生相当大的力,即车辆的横向(左右)产生相当大的加速度,乘员必须受得保护。这时,车辆的纵向(前后)不会产生明显的加速度。
所以,为了正确测定乘员保护系统的动作。必须考虑纵向产生的加速度和横向产生的加速度。
这种乘员保护系统坡露在日本公开专利申请号6-56000。用该系统测量车辆产生的加速度前后分量GX和左右分量GY。两种分量合成得出合成矢量,并计算出合成矢量的量值F和方向θ。然后方向θ得出阈值Fth(θ)。再确定量值F是否大于与方向θ相对应的阈值Fthθ(F>Fth(θ))。当上述条件满足时,保险气袋系统启动。在这种系统中,保险气袋系统的启动是根据车辆受力方向以及力的大小决定的。这样,就能合适地确定动作,而与车辆受力方向无关。
每当车辆受到外力,上述传统的乘员保护系统必须计算方向θ和与方向θ相对应的阈值Fth(θ)。为了求出阈值Fth(θ),推出一个方程式,以便进行复杂的计算。也就是说,在系统动作确定之前,该系统有许多必须进行运算的问题。从这点出发,上述传统的乘员保护系统实际不能应用。
本发明的一般目的是为车辆消除上述问题,提供一种改型的有用的乘员保护系统。
本发明的特别目的是提供一种通过简单运算,确定系统动作的乘员保护系统。
为了达到上述目的,提出一种本发明一个方面的车辆乘员保护系统,如图1描述的本发明原理,当车辆受到外力时,车辆产生加速度,该乘员保护系统包括:
保护装置(M5),用于保护外力超过预定值时上述车辆中的乘员;
外力假定装置(M1,M2,M3),用于假定车辆所受外力的大小和方向;
投影值计算装置(M4),用于计算与外力相对应的外力矢量得出的投影矢量投影值,外力矢量由外力假定装置假定的量值和方向求出,投影矢量为相对于预定方向的外力矢量投影;以及
动作确定装置(M6),用于确定保护装置的起动,通过投影值与预定阈值的比较,使得在投影值大于预定阈值时,保护装置动作。
外力假定装置包括:
第一特性值提取装置(M1),用于提取第一方向加速度第一分量的第一特性值,第一特性值代表相对于第一方向的外力第一矢量;
第二特性值提取装置(M2),用于提取不同于第一方向的第二方向加速度第二分量的第二特性值,第二特性值代表相对于第二方向的上述外力第二矢量;以及
合成矢量计算装置(M3),用于计算合成矢量的方向和大小,合成矢量是由第一矢量和第二矢量合成得出的,并与外力矢量相对应。
在上述发明中,相对于预定方向车辆受到外力引起的加速对应于矢量分量,其大小代表合成矢量的投影值,该值很容易求出,按照利用第一特性值和第二特性值计算出的合成矢量大小和方向进行简单的计算即可做到。由于通过投影值与预定阈值进行比较,很简单地测定保护装置的动作,所以,用简单的计算可做到精确确定。
在上述发明中,投影值计算装置(M4)可计算许多预定方向的投影值,动作确定装置(M6)比较每一投影值与相应的各个方向确定的阈值,当投影值超过任一预定方向的相应阈值时,即确定起动保护装置(M5)。如果车辆所受外力方向与前后方向斜交,则车辆产生旋转力。这样产生车辆左右侧之间加速度初始阶段之差。也就是说,其中一侧初始阶段的加速度相对地大于另一侧的加速度。由于当影值超过任一预定方向相应的阈值时,动作确定装置(M6)起动保护装置(M5),故能在很短时间内做出确定。
另外,按照本发明另一方面,如图2描述的本发明原理,推出一种车辆乘员保护系统,当车辆受到外力时,车辆产生加速度,该乘员保护系统包括:
保护位置(M5),用于保护外力超过预定值时车辆中的乘员;
第一特性值提取装置(M7),用于提取车辆前后方向加速度第一分量的第一特性值;
第二特性值得取装置(M9),用于提取车辆左右方向加速度第二分量的第二特性值;
动作确定装置(M8),用于确定在第一特性值大于预定阈值时保护装置的起动;以及
阈值变换装置(M10),用于按照第二特性值将预定阈值变为合适的值,阈值随着第二特性值的绝对值增加而降低。
根据本发明,通过第一特性值与预定阈值的简单比较,可确定保护装置(M5)的动作。这样不需要计算单个方向的阈值或合成矢量。因而,通过简单的运算,可做到精确确定,而不要进行复杂的计算。
通过下面详细说明,配合附图阅读,本发明的其他目的,特征和优点更为明显。
图1为方块图,表示本发明一个方面的乘员保护系统原理;
图2为方块图,表示本发明另一个方面的乘员保护系统原理;
图3为本发明第一实施例的乘员保护系统方块图;
图4为图3所示整个系统结构例图;
图5为图3所示CPU进行处理的流程图;
图6为特性值计算方法例图;
图7为预定方向投影值求算法例图;
图8为例图,表示各投影方向确定的阈值实例;
图9为本发明第一实施例进行处理的流程图;
图10为曲线图,表示有小的外部作用力时,相对于经过的时间,加速度X分量的变化;
图11为曲线图,表示有小的外部作用力时,相对于经过的时间,加速度Y分量的变化;
图12为曲线图,表示有小的外部作用力时,相对于经过的时间,速度X分量的变化;
图13为曲线图,表示有小的外部作用力时,相对于经过的时间,速度Y分量的变化;
图14为曲线图,表示速度量相对于时间经过的变化;
图15为曲线图,表示有小的外部作用力时,速度方向相对于时间经过的变化。
图16A和16B为曲线图,表示有小的外部作用力时,速度投影值的变化;
图17为曲线图,表示有小的外部作用力时,区间积分,求出的速度量相对于经过的时间变化;
图18为曲线图,表示有小的外部作用力时,区间积分,求出的速度方向相对于经过的时间变化;
图19A和19B为曲线图,表示有小的外部作用力时,区间积分,求出的速度投影值相对于经过的时间变化;
图20为曲线图,表示有大的外部作用力时,加速度X分量相对于经过的时间变化;
图21为曲线图,表示有大的外部作用力时,加速度Y分量相对于经过的时间变化;
图22为曲线图,表示有大的外部作用力时,速度X分量相对于经过的时间变化;
图23为曲线图,表示有大的外部作用力时,速度Y分量相对于经过的时间变化;
图24为曲线图,表示有大的外部作用力时,速度量相对于时间经过的变化;
图25为曲线图,表示有大的外部作用力时,速度方向相对于时间经过的变化;
图26A和26B为曲线图,表示有大的外部作用力时,速度投影值的变化;
图27为曲线图,表示有大的外部作用力时,区间积分,求出的速度量相对于经过的时间变化;
图28为曲线图,表示有大的外部作用力时,区间积分,求出的速度方向,相对于经过的时间变化;
图29A和29B为曲线图,表示有大的外部作用力时,区间积分,求出的速度投影值相对于经过的时间变化;
图30为图表,是为按照特性值确定保险气袋的动作而制订的;
图31为本发明第二实施例CPU进行处理的流程图。
现对本发明的第一实施例结构,参照图3和4给予描述。图3为本发明第一实施例乘员保护系统的方块图。图4为图3所示整个系统结构的例图。
如图4所示,车辆12装有乘员保护系统10。乘员保护系统10设有保险气袋14,16,18和20,这些气袋充气,用来保护车辆12上的乘员。驾驶员座椅没有保险气袋14和16。保险气袋14装在方向盘中心垫内,而保险气袋16则装在驾驶员侧的门内板里、乘员前面坐椅装置保险气袋18和20。保险气袋18位于仪表盘的下面,而保险气袋20则装在乘员侧的门内板里。
车辆12还装有电子控制装置(ECU)22,用来控制保险气袋14,16,18和20的动作,如图3所示,ECU22包括有中央处理装置(CPU)22a和模拟一数字(A/D)转换器22b和22c。前后G传感器24连接A/D转换器22b,探测车辆12产生的加速度前后分量。左右G传感器26连接A/D转换器22C,探测车辆12产生的加速度左右分量。
开关元件14a,16a,18a和20a连接CPU22。这些开关元件构成保险气袋14,16,18和20驱动电路的一部分。点火管14b,16b,18b和20b分别连接开关元件14a,16a,18a和20a,能引发保险气袋使之开始充气。点火管14b,16b,18b和20b还分别连接安全传感器14c,16c,18c和20c。安全传感器14c,16c,18c和20c再分别连接有关电源。各安全传感器14c,16c,18c和20c系机械传感器,它由一个弹簧和一个靠惯性运动的重锤组成。如果车辆12产生的减速度超过预定值,各个安全传感器14c,16c,18c和20c的电触点闭合。
在本实施例的上述结构中,当产生减速度时,其量值使得各安全传感器14c,16c,18c和20c的电触点闭合,如果向开关元件14a,16a,18a和20发出驱动信号,预定电流则流至各个点火管14b,16b,18b和20b。这样触发各个点火管14b,16b,18b和20b,从而使保险气袋14,16,18和20充气。在驱动电路中设置机械传感器的目的是防止因噪音引起电子电路误操作造成保险气袋不需要的动作。
应当注意,本发明第一实施例的乘员保护系统确定保险气袋14,16,18和20的动作,考虑到车辆12所受外力的方向,也就是说,本实施例保护乘员免遭伤亡,而不管车辆12受外力的方向。
图5为CPU22a进行处理的流程图,以便达到上述功能。当在预定方向产生的加速度超过预定阈值时,通过这种处理,起动保险气袋14,16,18和20。
图5所示程序开始时,在程序步100,向有关的前后G传感器24和左右传感器26输入车辆12产生的加速度前后分量GX和左右分量GY。
在程序步102中,计算特性值fx和fy用于有关的分量Gx和Gy。确定保险气袋14,16,18和20是否动作以因车辆12所受外力的方向和大小为基础。确定所用之值不限于分量GX和GY,其他能基本代表加速度分量GX和GY的数值也可使用。按程序步102计算的特性值fx和fy与该值一致。
也就是说,如图6所示,当车辆12产生加速度G(GX,GY)时,加速度G的特性与速度V(VX,VY)和位移S(SX,SY)有关,另外,与特性值f(fx,fy)也有关。加速度G积分求出速度V。加速度G重积分则求出位移S。加速度G的n次积分求出特性值f。
在这种情况下,使用特性值f,而不是直接使用加速度G数值情况时,可轻而易举地计算。引起加速度G的外力大小和方向分别用“(fx2+fy2)1/2”和“tan-1(fx/fy)”表示,如图6所示。在本实施例中,加速度G积分求出的速度V作特性值f使用。
通过前后G传感器24和左右G传感器26的输出量GX和GY积分可求出特性值f。此外,还可以通过预定时间间隔dt输出量GX和GY区间积分或用低通滤波器材,滤清输出量GX和GY求出特性值f。使用特性值f时,由于消除了特性值f中的输出量GX和GY高频振荡分量,计算取得稳定结果,这样可使特性值f反映出短时间隔加速度的变化。从而,达到快速反应计算结果。
在程序步104中,确定特性值f的X分量是否小于下限安全值fxmin。在该处理过程中,由于用计算“tan-1(fx/fy)”确定外力方向,故可按程序步104确定。如果X分量fx小于下限安全值fxmin,则特性计算结果可能离题。因此,如果确定X分量fx小于下限安全值fxmin,则程序回到程序步100。只有在程序步104确定为负值时,程序才能进到程序步106。
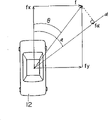
在程序步106中,按照方程式“f=(fx2+fy2)1/2”计算,确定车辆12所受外力的大小。在程序步108中按照方程式θ=“tan-1(fy/fx)”计算,确定外力的方向。
此后,程序进行到程序步110,其中,外力投影矢量值fa(以下简称投影值)相对于预定方向。在本实施例中,如图7所示,预定方向(以下简称α方向)定义为相对于车辆12前后方向的α度方向。因而,按照方程式“fα=fcos(θ-α)”简单计算,可求出外力投影fa。
在程序步112中,确定投影值fα是否大于预定阈值fth(α)。阈值fth(α)靠实验确定,以车辆乘员,在作用在α方向的外力值等于阈值fth(α)的时候必须保护的设想为基础。因此,如果在程序步112中确定,投影值fα小于预定阈值fth(α),则程序回到程度步100,不起动保险气袋14,16,18和20。
另一方向,如果在程序步112中确定,投影值fα大小于预定阈值fth(α),则程序进到程序步114。在程序步114中,由于程序步112确定,表示,必须保护车辆12中的乘员,点燃点火管14b,16b,18b和20b,于是程序结束。
如上所述,在本实施例中,用简单的方法,确定加速度是否是在任意方向(α方向)产生,其确定值应反映保险气袋的充气。这样,可短时做到有关保险气袋14,16,18和20动作正确而精确的确定。
虽然乘员保护系统10共有4个保险气袋,但位于乘员侧的保险气袋20,例如在车辆12受到来自驾驶员侧的外力时,不需要充气。在该实施例中,由于在程序步108求出外力方向θ,对于保险气袋14,16,18和20中那些要按方向θ充气的保险气袋可轻而易举地确定。所以,在程序步14中,只能点燃从点火管14b,16b,18b和20b中选出的点火管,选择按方向θ完成。
为了做到保险气袋起动精确确定,探测超过各个方向阈值产生加速度是有效的,也就是说,如图8所示各个方向确定阈值fth(α)。如果产生超过相应阈值fth(α)的加速度,则保险气袋14,16,18和20充气。这样,当在任一方向形成车辆12乘员保护条件时,保证确定起动保险气袋。
应当注意,图8所示例子有11个方向(以下简称αn),从角度α=-75°到角度α=75°,间隔为15°。阈值fth(αn)沿相应方向αn示出。图8中,阈值fth(αn)随着角度α的绝对值增加而降低这是因为车辆12一侧受到外力时,保险气袋靠小量外力而充气。
图9为按照图8所示阈值fth(αn)确定起动保险气袋的处理流程图。图9中,程序步与图5所示程序步一样,标出相同的参考编号,但其说明省略。
在图9所示处理过程中,程序步200在程序步100之前进行,在程序步200中,变量n首先设定到“0”。此后,进行程序步100~108,以便根据特性值fx和fy,计算外力量值f和方向θ。然后,程序进行到程序步202,以递增变量n。变量n与附在图8a后面的数字相一致。在开始执行程序时,变量n设定为“1”。
在以后的程序步204中为方向αn计算投影值fαn。然后,在程序步206中确定,投影值fαn是否大于相应的阈值fth(αn)。如果投影值fαn大于相应的阈值fth(αn),则程序进到程序步114,点燃点火管14b,16b,18b和20b。
另一方面,如果在程序步206中确定,投影值fαn小于相应的阈值fth(αn),则程序进到程序步208。然后在程序步208中确定变量n是否等于“11”。如果变量n等于“11”,则程序回到程序步200。如果确定变量n不等于“11”,则程序回到程序步202,重复程序步202~208,直到变量n等于“11”为止。
因此,如果任一投影值fαn超过相应的阈值fth(αn),则确定保险气袋充气。所以,用简单的运算,可使保险气袋起动达到可靠的确定。另外,与传统的乘员保护装置相比,可达到快速的确定。
可以看到,确定保险气袋充气化费的时间要求尽量短暂。在本实施例中,将阈值fth(αn)设定到合适的数值,进一步缩短确定所用时间。
现参考图10~29B对设定阈值fth(αn)为合适数值的方法加以描述。图10和11表示加速度G的X分量GX和Y分量GY,在车辆12所受外力不具有要求保险气袋动作的量值时,相对于经过的时间变化。不足以起动保险气袋的外力,以下简称小作用力。
图12和13表示速度V的X分量VX和Y分量VY相对于用作图9所示处理过程中特性值fx和fy经过的时间变化。如图10和11所示GX和GY分别积分,设定起始时间为开始受到外力的时间,求出X分量VX和Y分量VY。于是,与图12和13所示速度一致的外力为小作用力。
图14和15分别表示图14所示速度V的量值和方向θ,相对于按上述VX和VY计算经过的时间变化。图16A和16B表示投影值Vα相对于角度α设定为α1~α11时经过的时间变化;图16A表示α≥0的情况。图16b则表示α≤0的情况。
这时,由于车辆12受到小的作用力,各阈值fth(αn)必须设定得大于图16A和16B所示相应的投影值Vα。
如前面所述,通过GX和GY时间间隔积分,也可求出特性值f。图17和18分别表示量值V30和方向θ30相对于经过的时间变化。量值V30和方向θ30用相对间隔30ms的GX和GY区间积分进行计算。图19A和19B表示投影值V30α相对于角度α设定为α1~α11时经过的时间变化;图19A表示α≥0的情况;图19B则表示α≤0的情况。这时,由于车辆12受到小的作用力,各阈值fth(αn)必须设定得大于图19A和19B所示相应的投影值V30α。
另一方面,图20和21表示加速度G的X分量GX和Y分量GY相对于车辆受到的外力具有要求起动保险气袋量值时经过的时间变化。足以起动得保险气袋的外力,以下简称大作用力。
图22和23分别表示速度V的X分量VX和Y分量VY相对于图20和21所示用GX和GY求出经过的时间变化。图24和25分别表示图24所示速度V的量值和方向θ相对于按上述VX和VY计算经过的时间变化。图26A和26B表示投影值V30α相对于角度a设定为α1~α11时,经过的时间变化;图26A表示α≥0的情况;图26B表示α≤0的情况。
图27和28分别表示量值V30和方向θ30相对于时间经过的变化。用相对于间隔30ms和GX和GY时间间隔积分,计算量值V30和方向θ30。图29A和29B表示投影值V30α相对于角度α设定为α1~α11时经过的时间变化;图29A表示α≥0的情况;图29B表示α≤0的情况。这时,由于车辆12受到大的作用力,各阈值fth(αn)必须设定得小于图29A和29B所示相应的投影值V30α。
当车辆12受到外力时,如果外力的方向不等于0度,则车辆12由于外力引起旋转力而转动。如果外力太强,车辆12就强烈转动。如果外力不太强,相对于车辆12的转动,只有很小的影响。所以,如果车辆12所受外力很大,则车辆12强烈转动;如果外力很小,则车辆12几平没有转动。因此,图19A(α≥0)投影值V30α和图19B(α≤0)所示之量值,由于外力太小而几乎相同。另一方面图29A(α≥0)投影值V30a,由于外力太大造成车辆12转动,而有别于29B(α≤0)所示之量值。
上述现象表示,左侧(α为负值)速度的变化几乎等于在受到比较小的外力时初始阶段右侧(α为正值)的速度变化,而左侧的速度变化明显不同于在受到比较大的外力时初始阶段右侧的速度变化。可以观察到车辆12受到大的外力时,在左右其中任一方向上比较层烈的变化(增加)
在本实施例中,如果设定的阈值fth(αn)稍微大于图19A和19B所示投影值V30αn的最大值,则投影值V30αn在经过40ms时间之前,超图29B角度α为-75°,-60°和-45°上相应的阈值fth(αn)。根据图9所示处理过程,当投影值V30αn大于α1~α11任一角度上相应的阈值fth(αn)时,确定起动保险气袋。这样,考虑到由于与车辆12前后方向斜交方向上外部作用力造成车辆的转动,可达到有关保险气袋动作的快速确定。
在上述实施例中,通过探测车辆12产生的加速度前后分量和左右分量,确定车辆12所受的外力。不过,探测分量的方向不限于前后方向和左右方向,如果通过合成这些方向上的分量能够计算外力,则可选择任何方向。
现对本发明的第二个实施例加以阐述,第二个实施例的结构与上述图3所示的第一个实施例的结构一样。第一个实施例按照投影值确定保险气袋的动作,投影值则根据特性值fx和fy合成矢量求出的。然而,第二个实施例不能象第一实施例那样采用矢量计算进行起动保险气袋的确定。
确定特性值fx和fy的时候,只确定一个量值f和一个方向θ,确定角度θ时,也仅确定一个阈值fth(θ)。这意味着,可能事先准备好一个包括确定数据的表,表示确定的关系式f=(fx2+fy2)1/2>fth(θ)是否适宜于任意特性值fx和fy。图30即为该图表。图30所示表中,“ON”表示满足上述关系式,“OFF”表示不满足上述关系式。表中确定数据是依据阈值随fy绝对值增加而降低编制的。所以,确定数据表示,绝对值fy增加时在较小fx值上为“ON”。
在图30所示表中查找特性值fx和fy的数据,不用每次比较特性值与阈值fth(θ)就可确定关于保险气袋的起动。图31为第二个实施例CPU22a执行处理的流程图。在图31中,程序步与图5所示程序步一样,标出相同的参考编号,但其说明省略。
图31所示处理过程开始时,按照程序步100和102的GX和GY计算特性值fx和fy。然后,按程序300,根据特性值fy,确定图30所示表中指出的栏位(以下简称参考栏)。这样,从表上,在参考栏与特性值fx所示行列的的相交点,读出确定数据。于是,在程序步302中确定,确定数据是否表为“ON”。
如果确定,确定数据表示为“ON”,则程序进到程序步114,起动保险气袋,于是程序结束。如果确定,确定数据未表示为“ON”,程序则进到程序步100,重复程序步100~302。
在本实施例中,参照事先准备好的表,不用进行复杂的计算,就可确定保险气袋的起动。可以说,用简单的运算,就可取得可靠的确定。
在本实施例中,按照二维图,可确定保险气袋的起动,该图中,阈值fxth根据fy值逐步变化。在这种情况下,首先,按照fx值,确定二维图表示的栏位。然后,确定fx是否大于fxth。如果fx大于fxth,则确定起动保险气袋。
应当注意,在本发明中,保险气袋14,16,18和20起到乘员保护装置的作用。然而,在另外的方案中,也可装置如预载器的其他装置作为乘员保护装置,这种预载器可退绕过长的安全带。
本发明不限于专门公开的实施例,在不违反本发明范围的条件下,可以变更和改进。
Claims (9)
1.车辆(12)用乘员保护系统(10),上述车辆受到外力时,上述车辆产生加速度,上述乘员保护系统包括:
保护装置(M5),用于保护上述外力超过预定值时上述车辆中的乘员;其特征在于:
外力假定装置(M1,M2,M3),用于假定上述车辆所受外力的大小和方向;
投影值计算装置(M4),用于计算与外力相适应的外力矢量得出的投影矢量投影值,上述外力矢量由上述外力假定装置假定的量值和方向求出,上述投影矢量为上述外力矢量相对于预定方向的投影;以及
动作确定装置(M6),用于确定上述保护装置的起动,通过上述投影值与预定阈值的比较,使得在上述投影值大于上述预定阈值时,上述保护装置动作。
2.权利要求1所述的乘员保护系统,其特征在于:上述外力假定装置包括:
第一特性值提取装置(M1),用于提取第一方向上述加速度第一分量的第一特性值,上述第一特性值代表相对于上述第一方向的上述外力第一矢量;
第二特性值提取装置(M2),用于提取不同于上述第一方向的第二方向上述加速度第二分量的第二特性值,上述第二特性值代表相对于上述第二方向的上述外力第二矢量,以及
合成矢量计算装置(M3),用于计算合成矢量的方向与大小,合成矢量是由上述第一矢量和上述第二矢量合成得出的,上述合成矢量与上述外力矢量相对应。
3.权利要求2所述的乘员保护系统,其特征在于:通过上述加速度的上述第一分量和上述第二分量相对于时间的积分,分别提取上述第一特性值和上述第二特性值。
4.权利要求2所述的乘员保护系统,其特征在于:通过上述加速度的上述第一分量和上述第二分量相对于时间的n次积分提取上述第一特性值和上述第二特性值,n为大于1的整数。
5.权利要求2所述的乘员保护系统,其特征在于:通过对上述加速度的上述第一分量和上述第二分量相对于时间的区间积分提取上述第一特性和上述第二特性。
6.权利要求2所述的乘员保护系统,其特征在于:上述第一方向对应上述车辆(12)的前后方向,而上述第二方向则对应上述车辆(12)的左右方向。
7.权利要求2所述的乘员保护系统,其特征在于:上述投影值计算装置(M4)计算许多预定方向的上述投影值,而上述动作确定装置(M6)比较每一计算出的投影值与每一上述预定方向确定的相应阈值,当上述投影值超过任一上述预定方向上的相应阈值时,确定起动上述保护装置。
8.权利要求7所述的乘员保护系统,其特征在于:上述预定方向限定在相对于上述车辆(12)前后方向,从负75度到正75度的范围内,上述范围分为均匀间隔。
9.权利要求8所述的乘员保护系统,其特征在于:上述间隔为15度。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP260528/94 | 1994-10-25 | ||
| JP6260528A JP3050061B2 (ja) | 1994-10-25 | 1994-10-25 | 乗員拘束装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1125670A CN1125670A (zh) | 1996-07-03 |
| CN1043201C true CN1043201C (zh) | 1999-05-05 |
Family
ID=17349222
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95117640A Expired - Fee Related CN1043201C (zh) | 1994-10-25 | 1995-10-24 | 采用特性值简单运算起动的乘员保护系统 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US5740041A (zh) |
| EP (1) | EP0709255B1 (zh) |
| JP (1) | JP3050061B2 (zh) |
| KR (1) | KR0182787B1 (zh) |
| CN (1) | CN1043201C (zh) |
| CA (1) | CA2161158A1 (zh) |
| DE (1) | DE69507108T2 (zh) |
| TW (2) | TW318459U (zh) |
Families Citing this family (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08246512A (ja) * | 1995-03-07 | 1996-09-24 | Shinwa Musen Syst Kk | 漏水検知器具 |
| US6095554A (en) * | 1995-06-15 | 2000-08-01 | Trw Inc. | Method and apparatus for sensing side impact crash conditions with an enhanced safing function |
| JP2973902B2 (ja) * | 1995-11-06 | 1999-11-08 | トヨタ自動車株式会社 | 乗員保護装置の起動制御装置 |
| DE19609176A1 (de) * | 1996-03-11 | 1997-09-18 | Bosch Gmbh Robert | Verfahren und Anordnung zum Erkennen eines Fahrzeug-Überschlags |
| DE19609717A1 (de) * | 1996-03-13 | 1997-09-18 | Bosch Gmbh Robert | Anordnung zum Erkennen von Überrollvorgängen bei Fahrzeugen |
| JP3333813B2 (ja) * | 1996-11-20 | 2002-10-15 | トヨタ自動車株式会社 | 乗員保護装置の起動制御装置 |
| DE19736840B4 (de) * | 1997-08-23 | 2006-01-26 | Volkswagen Ag | Verfahren zur situationsabhängigen Auslösung eines Rückhaltesystems und Rückhaltesystem |
| US6063132A (en) * | 1998-06-26 | 2000-05-16 | International Business Machines Corporation | Method for verifying design rule checking software |
| US6186539B1 (en) * | 1998-07-01 | 2001-02-13 | Trw Inc. | Method and apparatus for controlling an actuatable restraint device using crash severity indexing and crush zone sensor |
| DE19851981C2 (de) * | 1998-11-11 | 2000-09-14 | Daimler Chrysler Ag | Verfahren zur Steuerung eines aktiven Insassenkopfschutzsystems in einem Fahrzeug |
| JP3346472B2 (ja) | 1999-02-01 | 2002-11-18 | トヨタ自動車株式会社 | 乗員保護装置の起動制御装置 |
| JP3436185B2 (ja) | 1999-02-09 | 2003-08-11 | トヨタ自動車株式会社 | 乗員保護装置の起動制御装置 |
| US6834218B2 (en) * | 2001-11-05 | 2004-12-21 | Ford Global Technologies, Llc | Roll over stability control for an automotive vehicle |
| US7109856B2 (en) * | 2000-09-25 | 2006-09-19 | Ford Global Technologies, Llc | Wheel lifted and grounded identification for an automotive vehicle |
| US6356188B1 (en) | 2000-09-25 | 2002-03-12 | Ford Global Technologies, Inc. | Wheel lift identification for an automotive vehicle |
| US7233236B2 (en) * | 2000-09-25 | 2007-06-19 | Ford Global Technologies, Llc | Passive wheel lift identification for an automotive vehicle using operating input torque to wheel |
| US7132937B2 (en) * | 2000-09-25 | 2006-11-07 | Ford Global Technologies, Llc | Wheel lift identification for an automotive vehicle using passive and active detection |
| US6904350B2 (en) | 2000-09-25 | 2005-06-07 | Ford Global Technologies, Llc | System for dynamically determining the wheel grounding and wheel lifting conditions and their applications in roll stability control |
| US6520536B2 (en) | 2001-05-04 | 2003-02-18 | Trw Inc. | Method and apparatus for controlling an occupant side restraining device with enhanced side safing function |
| US6336499B1 (en) * | 2001-05-31 | 2002-01-08 | Hong Tsai Liu | CPU heat sink mounting structure |
| US6654674B2 (en) * | 2001-11-21 | 2003-11-25 | Ford Global Technologies, Llc | Enhanced system for yaw stability control system to include roll stability control function |
| US6556908B1 (en) | 2002-03-04 | 2003-04-29 | Ford Global Technologies, Inc. | Attitude sensing system for an automotive vehicle relative to the road |
| US6941205B2 (en) * | 2002-08-01 | 2005-09-06 | Ford Global Technologies, Llc. | System and method for deteching roll rate sensor fault |
| US7085639B2 (en) * | 2002-08-01 | 2006-08-01 | Ford Global Technologies, Llc | System and method for characterizing the road bank for vehicle roll stability control |
| US7003389B2 (en) * | 2002-08-01 | 2006-02-21 | Ford Global Technologies, Llc | System and method for characterizing vehicle body to road angle for vehicle roll stability control |
| US7194351B2 (en) * | 2002-08-01 | 2007-03-20 | Ford Global Technologies, Llc | System and method for determining a wheel departure angle for a rollover control system |
| US7079928B2 (en) * | 2002-08-01 | 2006-07-18 | Ford Global Technologies, Llc | System and method for determining a wheel departure angle for a rollover control system with respect to road roll rate and loading misalignment |
| US7302331B2 (en) * | 2002-08-01 | 2007-11-27 | Ford Global Technologies, Inc. | Wheel lift identification for an automotive vehicle |
| US6961648B2 (en) | 2002-08-05 | 2005-11-01 | Ford Motor Company | System and method for desensitizing the activation criteria of a rollover control system |
| US6963797B2 (en) * | 2002-08-05 | 2005-11-08 | Ford Global Technologies, Llc | System and method for determining an amount of control for operating a rollover control system |
| US7430468B2 (en) * | 2002-08-05 | 2008-09-30 | Ford Global Technologies, Llc | System and method for sensitizing the activation criteria of a rollover control system |
| US20040024504A1 (en) * | 2002-08-05 | 2004-02-05 | Salib Albert Chenouda | System and method for operating a rollover control system during an elevated condition |
| US7085642B2 (en) * | 2002-08-05 | 2006-08-01 | Ford Global Technologies, Llc | Method and system for correcting sensor offsets |
| US20040024505A1 (en) * | 2002-08-05 | 2004-02-05 | Salib Albert Chenouda | System and method for operating a rollover control system in a transition to a rollover condition |
| US7239949B2 (en) * | 2003-02-26 | 2007-07-03 | Ford Global Technologies, Llc | Integrated sensing system |
| US9162656B2 (en) * | 2003-02-26 | 2015-10-20 | Ford Global Technologies, Llc | Active driven wheel lift identification for an automotive vehicle |
| US7653471B2 (en) * | 2003-02-26 | 2010-01-26 | Ford Global Technologies, Llc | Active driven wheel lift identification for an automotive vehicle |
| US7136731B2 (en) * | 2003-06-11 | 2006-11-14 | Ford Global Technologies, Llc | System for determining vehicular relative roll angle during a potential rollover event |
| US7308350B2 (en) * | 2004-05-20 | 2007-12-11 | Ford Global Technologies, Llc | Method and apparatus for determining adaptive brake gain parameters for use in a safety system of an automotive vehicle |
| US7451032B2 (en) * | 2004-06-02 | 2008-11-11 | Ford Global Technologies, Llc | System and method for determining desired yaw rate and lateral velocity for use in a vehicle dynamic control system |
| US7640081B2 (en) | 2004-10-01 | 2009-12-29 | Ford Global Technologies, Llc | Roll stability control using four-wheel drive |
| US7668645B2 (en) | 2004-10-15 | 2010-02-23 | Ford Global Technologies | System and method for dynamically determining vehicle loading and vertical loading distance for use in a vehicle dynamic control system |
| US7715965B2 (en) | 2004-10-15 | 2010-05-11 | Ford Global Technologies | System and method for qualitatively determining vehicle loading conditions |
| US7660654B2 (en) | 2004-12-13 | 2010-02-09 | Ford Global Technologies, Llc | System for dynamically determining vehicle rear/trunk loading for use in a vehicle control system |
| US7590481B2 (en) * | 2005-09-19 | 2009-09-15 | Ford Global Technologies, Llc | Integrated vehicle control system using dynamically determined vehicle conditions |
| US7600826B2 (en) * | 2005-11-09 | 2009-10-13 | Ford Global Technologies, Llc | System for dynamically determining axle loadings of a moving vehicle using integrated sensing system and its application in vehicle dynamics controls |
| US8121758B2 (en) * | 2005-11-09 | 2012-02-21 | Ford Global Technologies | System for determining torque and tire forces using integrated sensing system |
| JP4483925B2 (ja) * | 2007-10-04 | 2010-06-16 | トヨタ自動車株式会社 | 衝突判定装置、及び乗員保護装置 |
| DE102008003339A1 (de) * | 2008-01-07 | 2009-07-09 | Robert Bosch Gmbh | Verfahren und Steuergerät zur Ansteuerung von Personenschutzmitteln für ein Fahrzeug |
| JP5871612B2 (ja) * | 2011-12-26 | 2016-03-01 | 株式会社クボタ | 作業車 |
| DE102014202666B4 (de) * | 2014-02-13 | 2024-05-23 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Auslösen zumindest eines Personenschutzmittels eines Fahrzeugs |
| DE102016222501A1 (de) * | 2016-11-16 | 2018-05-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bewerten einer Beschleunigung |
| DE102017204390A1 (de) | 2017-03-16 | 2018-09-20 | Robert Bosch Gmbh | Verfahren zum Auslösen von Sicherheitsfunktionen |
| JP7334695B2 (ja) * | 2020-09-04 | 2023-08-29 | トヨタ自動車株式会社 | 車両用乗員支援装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS605600A (ja) * | 1983-06-23 | 1985-01-12 | 九州日本電気株式会社 | ロ−デイング装置 |
| US5202831A (en) * | 1991-07-09 | 1993-04-13 | Trw Vehicle Safety Systems Inc. | Method and apparatus for controlling an occupant restraint system using real time vector analysis |
| US5234228A (en) * | 1991-02-12 | 1993-08-10 | Honda Giken Kogyo Kabushiki Kaisha | Air bag apparatus |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2745620A1 (de) * | 1977-10-11 | 1979-04-12 | Daimler Benz Ag | Luftsack-system zum schutz der insassen eines kraftfahrzeuges bei unfaellen |
| DE3717427C3 (de) * | 1987-05-23 | 1994-09-01 | Deutsche Aerospace | Aufprallsensor für Kraftfahrzeuge |
| DE3803426A1 (de) * | 1988-02-05 | 1989-08-17 | Audi Ag | Verfahren zur wirksamschaltung eines sicherheitssystems |
| DE3816587A1 (de) * | 1988-05-16 | 1989-11-23 | Messerschmitt Boelkow Blohm | Einrichtung zur ausloesung einer passiven sicherheitseinrichtung |
| EP0434679B1 (en) * | 1988-09-17 | 1993-05-12 | Robert Bosch Gmbh | Apparatus for tripping a system for the protection of occupants of a vehicle |
| JPH0343058U (zh) * | 1989-09-06 | 1991-04-23 | ||
| JPH0443938A (ja) * | 1990-06-11 | 1992-02-13 | Hitachi Ltd | リンク機構解析方法 |
| DE4116336C1 (en) * | 1991-05-18 | 1992-06-11 | Messerschmitt-Boelkow-Blohm Gmbh, 8012 Ottobrunn, De | Passive safety device release assembly for motor vehicle occupant - has acceleration pick=ups with sensitivity axes directed to detect angle of frontal impact and supplying evaluating circuit |
| US5282134A (en) * | 1991-08-19 | 1994-01-25 | Automotive Systems Laboratory, Inc. | Slant transform/signal space crash discriminator |
| JP2876363B2 (ja) * | 1991-09-11 | 1999-03-31 | トヨタ自動車株式会社 | サイドエアバッグ装置の側面衝突センサシステム |
| ES2088159T3 (es) * | 1991-10-31 | 1996-08-01 | M M B Pineroli I | Dispositivo para la determinacion de magnitudes de estado de marcha de un vehiculo. |
| JP3141534B2 (ja) * | 1992-06-22 | 2001-03-05 | トヨタ自動車株式会社 | エアバック制御装置 |
| JP2776161B2 (ja) * | 1992-08-04 | 1998-07-16 | トヨタ自動車株式会社 | 衝突検出装置 |
| JP3383816B2 (ja) * | 1992-08-04 | 2003-03-10 | トヨタ自動車株式会社 | 車両用エアバッグ作動制御装置 |
| JP3365799B2 (ja) * | 1992-11-24 | 2003-01-14 | オリンパス光学工業株式会社 | 距離・速度測定装置 |
| JP3214932B2 (ja) * | 1992-11-24 | 2001-10-02 | オリンパス光学工業株式会社 | 距離・速度予知装置 |
| US5484166A (en) * | 1994-07-22 | 1996-01-16 | Trw Vehicle Safety Systems Inc. | Method and apparatus for providing a deployment signal for a vehicle occupant restraint device during a side impact crash |
-
1994
- 1994-10-25 JP JP6260528A patent/JP3050061B2/ja not_active Expired - Fee Related
-
1995
- 1995-08-11 TW TW085212044U patent/TW318459U/zh unknown
- 1995-08-12 TW TW084108420A patent/TW309489B/zh active
- 1995-09-19 KR KR1019950030642A patent/KR0182787B1/ko not_active IP Right Cessation
- 1995-10-19 US US08/545,225 patent/US5740041A/en not_active Expired - Fee Related
- 1995-10-23 CA CA002161158A patent/CA2161158A1/en not_active Abandoned
- 1995-10-24 EP EP95116760A patent/EP0709255B1/en not_active Expired - Lifetime
- 1995-10-24 CN CN95117640A patent/CN1043201C/zh not_active Expired - Fee Related
- 1995-10-24 DE DE69507108T patent/DE69507108T2/de not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS605600A (ja) * | 1983-06-23 | 1985-01-12 | 九州日本電気株式会社 | ロ−デイング装置 |
| US5234228A (en) * | 1991-02-12 | 1993-08-10 | Honda Giken Kogyo Kabushiki Kaisha | Air bag apparatus |
| US5202831A (en) * | 1991-07-09 | 1993-04-13 | Trw Vehicle Safety Systems Inc. | Method and apparatus for controlling an occupant restraint system using real time vector analysis |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0709255B1 (en) | 1999-01-07 |
| KR0182787B1 (ko) | 1999-05-01 |
| DE69507108D1 (de) | 1999-02-18 |
| KR960013870A (ko) | 1996-05-22 |
| JP3050061B2 (ja) | 2000-06-05 |
| CN1125670A (zh) | 1996-07-03 |
| TW318459U (en) | 1997-10-21 |
| EP0709255A1 (en) | 1996-05-01 |
| US5740041A (en) | 1998-04-14 |
| CA2161158A1 (en) | 1996-04-26 |
| TW309489B (zh) | 1997-07-01 |
| JPH08119060A (ja) | 1996-05-14 |
| DE69507108T2 (de) | 1999-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1043201C (zh) | 采用特性值简单运算起动的乘员保护系统 | |
| US10850639B2 (en) | Vehicle seat control device, vehicle seat control method and vehicle seat control program | |
| CN1276851C (zh) | 倾翻判断系统和方法 | |
| US10464551B2 (en) | Traveling support device | |
| US7162340B2 (en) | Vehicle rollover detection and method of anticipating vehicle rollover | |
| CN101522477B (zh) | 车辆安全系统以及用于探测车辆的侧面碰撞的方法 | |
| CN1146512C (zh) | 乘员气囊的起动控制装置 | |
| US11584332B2 (en) | Seat belt device | |
| US9254803B2 (en) | Apparatus for protecting passenger of autombile and control methodlamp | |
| JP2973902B2 (ja) | 乗員保護装置の起動制御装置 | |
| CN1226155C (zh) | 用于控制气囊展开的设备和方法 | |
| US7386384B2 (en) | System and method for predicting a vehicle rollover | |
| CN1576114A (zh) | 确定车辆驾驶员头部位置的方法和装置 | |
| JP5133367B2 (ja) | 側突判定装置 | |
| CN1800780A (zh) | 车载道路坡度角测量系统及车载道路坡度角测量方法 | |
| EP2505435B1 (en) | Control of active vehicle devices during cornering | |
| JP2020037395A (ja) | 原動機付き二輪車、特にオートバイを運転する方法および方法を実施するためのコンピュータプログラム。 | |
| US20130332032A1 (en) | Method and control unit for activating a safety device for a vehicle in a rollover situation | |
| KR20120018612A (ko) | 에어백 제어방법 | |
| JP2005283290A (ja) | 傾斜検出装置 | |
| JP7124423B2 (ja) | 衝突検知装置 | |
| JP2007245829A (ja) | オフセット補正診断装置ならびにロールオーバー対応エアバッグシステム | |
| JP2003261003A (ja) | 乗員保護装置の起動制御装置 | |
| US20190225174A1 (en) | Vehicle airbag firing control system and airbag firing control method using the same | |
| CN204472669U (zh) | 一种前照灯调节系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |