CN100457545C - 计算机控制的用于船体表面修整和涂漆的方法及装置 - Google Patents
计算机控制的用于船体表面修整和涂漆的方法及装置 Download PDFInfo
- Publication number
- CN100457545C CN100457545C CNB2004100335514A CN200410033551A CN100457545C CN 100457545 C CN100457545 C CN 100457545C CN B2004100335514 A CNB2004100335514 A CN B2004100335514A CN 200410033551 A CN200410033551 A CN 200410033551A CN 100457545 C CN100457545 C CN 100457545C
- Authority
- CN
- China
- Prior art keywords
- robot
- hull
- trim materials
- superstructure
- instrument
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05D—PROCESSES FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05D1/00—Processes for applying liquids or other fluent materials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B13/00—Machines or plants for applying liquids or other fluent materials to surfaces of objects or other work by spraying, not covered by groups B05B1/00 - B05B11/00
- B05B13/005—Machines or plants for applying liquids or other fluent materials to surfaces of objects or other work by spraying, not covered by groups B05B1/00 - B05B11/00 mounted on vehicles or designed to apply a liquid on a very large surface, e.g. on the road, on the surface of large containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B12/00—Arrangements for controlling delivery; Arrangements for controlling the spray area
- B05B12/08—Arrangements for controlling delivery; Arrangements for controlling the spray area responsive to condition of liquid or other fluent material to be discharged, of ambient medium or of target ; responsive to condition of spray devices or of supply means, e.g. pipes, pumps or their drive means
- B05B12/084—Arrangements for controlling delivery; Arrangements for controlling the spray area responsive to condition of liquid or other fluent material to be discharged, of ambient medium or of target ; responsive to condition of spray devices or of supply means, e.g. pipes, pumps or their drive means responsive to condition of liquid or other fluent material already sprayed on the target, e.g. coating thickness, weight or pattern
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B13/00—Machines or plants for applying liquids or other fluent materials to surfaces of objects or other work by spraying, not covered by groups B05B1/00 - B05B11/00
- B05B13/02—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work
- B05B13/04—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation
- B05B13/0431—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation with spray heads moved by robots or articulated arms, e.g. for applying liquid or other fluent material to 3D-surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B1/00—Processes of grinding or polishing; Use of auxiliary equipment in connection with such processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B27/00—Other grinding machines or devices
- B24B27/0015—Hanging grinding machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B27/00—Other grinding machines or devices
- B24B27/0038—Other grinding machines or devices with the grinding tool mounted at the end of a set of bars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24C—ABRASIVE OR RELATED BLASTING WITH PARTICULATE MATERIAL
- B24C3/00—Abrasive blasting machines or devices; Plants
- B24C3/02—Abrasive blasting machines or devices; Plants characterised by the arrangement of the component assemblies with respect to each other
- B24C3/04—Abrasive blasting machines or devices; Plants characterised by the arrangement of the component assemblies with respect to each other stationary
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0075—Manipulators for painting or coating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/02—Manipulators mounted on wheels or on carriages travelling along a guideway
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0084—Programme-controlled manipulators comprising a plurality of manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/06—Cleaning devices for hulls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B59/00—Hull protection specially adapted for vessels; Cleaning devices specially adapted for vessels
- B63B59/06—Cleaning devices for hulls
- B63B59/10—Cleaning devices for hulls using trolleys or the like driven along the surface
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/20—Measuring arrangements characterised by the use of mechanical techniques for measuring contours or curvatures
- G01B5/207—Measuring arrangements characterised by the use of mechanical techniques for measuring contours or curvatures using a plurality of fixed, simultaneously operating transducers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Application Of Or Painting With Fluid Materials (AREA)
- Spray Control Apparatus (AREA)
- Coating Apparatus (AREA)
- Manipulator (AREA)
Abstract
一种计算机控制的使用机器人对船体表面修整及涂漆的方法,包括以下步骤:分析船壳和/或上层建筑以找到缺陷;在缺陷处施加修整材料;光整这些缺陷处以使其与船壳和/或上层建筑平齐;以及对船壳和/或上层建筑完成涂漆这一最后的工序。
Description
本申请是申请号为00128338.3、申请日为2000年11月17日的、发明名称为“计算机控制的用于船体表面修整和涂漆的方法及装置”的中国发明专利申请的分案申请。
技术领域
本发明涉及船体的自动修整和涂漆,且本发明特别涉及用于分析表面缺陷,修整(fairing),施加可雾化的修整材料(fairing compound),以及涂漆的计算机控制机器人装置的使用。
背景技术
当今,普通的船只采用已被时间证实可行的技术和方法来建造。已知修整是制造过程的一部分。修整是一个使不光滑表面被填充、打磨且涂底漆以为涂漆作准备的过程。作为造船工业中使用的修整过程,它几乎专门对游(快)艇的外表面采用,这样可以大大地提高在专业修整过的船壳或上层建筑上的涂漆的美观质量使涂漆完毕的表面呈均匀的镜面般的质量。由于所耗费的成本和时间以及该过程的纯美观特性使商业和军用的船只几乎不进行修整。
修整是通过分析船体的外表面来找到缺陷并随后使用某种技术来从船体或上层建筑上清除该缺陷来完成。通常,技术熟练的船员使用手操纵的气动工具、手操纵的电动工具,单纯的手动工具或它们的任意的组合来进行这个过程。第一个步骤是通过使用直角边,长板或标尺“测绘”或标出船体表面的缺陷来分析船壳或上层建筑表面的缺陷。下一个步骤包括涂底漆,通常是一种用于喷涂的底漆。在“测绘”和涂底漆步骤后,任何深度大约大于1/8英寸的缺陷被用镘刀或长金属散布器以可用镘刀涂抹的修整材料填充。当可用镘刀涂抹的填料硬化后,用附有砂纸的手块或长板以及手动的打磨器进行手动打磨。当被修整的表面相对光滑及平顺后,可选择的最后的工序是使用手动操纵的喷射装置喷涂可雾化修整材料。一旦所有的修整材料已被施加且已被手动打磨,就对已修整过的船壳或上层建筑涂底漆以及涂漆,然后就完成了修整和涂漆过程。
使用目前的方法,5000平方英尺不平整面积的表面大约需要每平方英尺2.2工时或总共11000工时来将不平整表面修整到高质量的表面,即“游艇的质量”的最终涂漆的表面。相关的工业,如汽车制造工业,已通过使生产过程某方面自动化来尝试解决这个由手来完成大量任务所带来的效率低下。例如,授予Veciello的美国专利4532148描述了通过在臂上连接有旋转钟型雾化装置的机器人来实现的汽车自动喷漆系统。尽管这个发明对于大规模生产的汽车的喷漆是足够的,但它只能用于喷漆。
授予Kiba等人的美国专利4498414描述了一种汽车喷漆机器人。这个机器人被设计成在装配线上给汽车喷漆并具有附加的特征,即能够打开车门以更靠近汽车来喷漆。
以上的专利涉及自动喷漆机器人以及用于用机器人喷漆的系统,同时授予Andoe的美国专利5571312描述了一种可以由机器人涂覆到船体上的涂覆材料。
上面的参考文献(上述各文献被引作参考)中没有一个描述了用于修整船体的方法。另外,船体工业还没有发明出一种自动方法来节省消耗在船体和上层建筑修整上的时间和花费。
发明内容
结果,本领域中需要一种自动修整船体以节省时间和花费并保证修整精度的方法。
本领域中还需要一种采用带有可互换工作头的多功能机器人的自动修整方法。
本发明通过提供自动技术来对船体的船壳及上层建筑进行分析,修整以及涂漆以节省材料成本、劳动力,并通过提供计算机控制的精确的修整来满足技术上的需求。
本发明优选的实施例是一种使用机器人系统来修整船体的船壳或上层建筑的由计算机控制完成的方法,机器人系统包括多个机器人,这些机器人放置在可动装置上并且具有带有各种固定装置的可绕各种控制轴运动的臂。该方法包括:设置船体以使机器人可以接近船壳和上层建筑;分析船壳和上层建筑以找到缺陷;在缺陷处施加修整材料;打磨修整材料以使其与船体或上层建筑平齐;清除任何由打磨过程产生的材料尘屑;以及在船壳或上层建筑上涂底漆及喷漆的步骤。
在本发明的另一个优选的实施例中,机器人被设置在导管或台架上以便移动。
在本发明的另一个优选的实施例中,机器人带有可用于固定及操纵各种附件的臂。
在本发明另一个优选的实施例中,分析步骤还包括使用固定在机器人上的利用激光的表面测绘系统。
在本发明的另一个实施例中,分析步骤还包括使用固定在机器人上的利用雷达的表面测绘系统。
在本发明的另一个实施例中,修整材料施加步骤还包括使用固定在机器人臂的末端的喷洒装置。
在本发明的另一个实施例中,修整步骤还包括使用固定在机器人臂末端的相互连接的研磨装置和真空装置。
在本发明的另一个实施例中,喷漆步骤还包括使用固定在机器人臂末端的第二喷洒装置。
在本发明的另一个实施例中,步骤中还包括使用为机器人所用的可互换附件。
于是,本发明的一个目的是使用机器人通过应用表面测绘激光器或雷达来分析在船体的船壳或上层建筑中的缺陷。
本发明的另一个目的是以机器人使用施加喷涂材料的喷洒装置来喷涂可雾化修整材料,这些修整材料是修复在船体的船壳或上层建筑中被探测到的缺陷所必需。
本发明的另一个目的是一旦修整材料被喷涂到船体上,以机器人使用研磨或打磨头来打磨该修整材料以得到光滑的表面。
本发明的另一个目的是通过真空管或其它类似的清理装置来从工作区清除由打磨过程产生的修整材料尘屑。
本发明的另一个目的是以机器人使用可喷漆的喷洒装置来在船体表面进行最后的喷漆过程。
本发明的另一个目的是提供用于机器人的可移动装置,来实现允许机器人与船体的船壳和上层建筑的表面完全接近的目的。
本发明的另一个目的是提供带有各种可互换工具的机器人,这些工具用于完成分析船壳缺陷,施加修整材料,打磨船壳及喷漆任务。
附图说明
从下面结合附图的说明和所附的权利要求书,本发明的上述目的和优点将变得更清楚,而这些附图仅是示例性地示出了本发明的一些优选实施例。附图中:
图1是一位于自动修整系统的工作区内的船体以及根据本发明的所述系统的大致布置平面图;
图2是根据本发明优选实施例的带有台架安装机器人的自动修整系统的透视图;
图3是一水平的侧视图,示出用于根据本发明的自动修整系统和方法的导轨安装机器人和台架安装机器人;以及
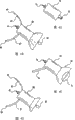
图4A-4D是根据本发明的与机器人一起使用的各种头的透视图。
具体实施方式
参照附图,且具体参考其中的图1,图中显示了一自动修整系统10,其包括用于指挥机器人14运动的控制器12。所述控制器能够接收各种电输入信号以初始化机器人14使之按照预先编制的步骤进行工作。机器人14安装在平行的导轨16上以可以沿船体18的纵轴运动。船体18位于导轨16之间的机器人14的工作区内,使所述的机器人能够沿船体18的长度完全接近。
图2表示了本系统10的另一个实施例的透视图,其中可以看出在导轨16上的机器人14与台架20以及台架安装机器人22一同在船体上工作,所述台架(gantry)20和台架安装机器人22也由控制器12控制。根据该另一个实施例,台架应能够沿船体18的纵轴上下进行线性移动24,且在台架20上的机器人22应具有从一侧到另一侧的运动,以及采用伸缩装置35来升高或降低到工作表面。如对图1的说明中所述,本发明的实施例仅用机器人14工作,不用台架20,且本发明的装置包括机器人14,不包括台架20。另外,当使用台架20时,各种变动的结构在本发明的范围内也都可以采用,如当为腿支撑时可如图2所示,或者可以如图2所示带有腿支撑但从上方悬挂台架。
如图3中可以看到的,机器人14和22是液力操纵元件,其包括一基体30,一第一臂32,一第二臂34以及一终止在支撑头38处的腕部36,支撑头38与可互换的工具50、60、70及80中的任一个固接。控制器12及基体30,第一臂32,第二臂34、腕部36、支撑头38以及可互换的工具50、60、70和80有效地连接以使可互换的工具50、60、70和80能够以期望的方式运动。
图4A-4D说明了各种用在本自动修整系统10中的可互换的工具50、60、70和80。图4A中的可任选的分析器工具50用于通过使用表面测绘激光或雷达53来分析船体的表面19。这个工具利用一与腕部36锁结的连接装置51来固定。分析过程由装在机器人14和22的基体30上(而不是装在第二臂34末端)的分析装置来完成。
在图4B中的修整材料施加工具60采用了喷嘴62,其通过导管65和67分别供给高压气体64和修整材料66。该工具利用一与腕部36相连的连接装置61来固定。该工具利用一与腕部36相连的连接装置61来固定。
图4C显示了一用于对已被修整材料66处理后的区域进行打磨的可互换的打磨工具70。该工具采用一与真空管74相连的打磨装置72,真空管74用于清除由光整修整材料66产生的有毒的尘埃。一护罩76将打磨装置72和真空管74环绕。真空管穿过工具70而伸出到护罩76中与打磨装置72接近,为了图面清晰,该部分未在图4C中画出,但通过上面的描述可以理解。护罩76被用来防止尘屑四处飞扬且增强真空管74的抽吸能力。打磨工具70通过连接装置71可互换地固定在腕部36上。并且,也可使用其它的各种工具,用以清洗已被分析并已被修整材料处理过的表面;例如,水喷射装置可被用作其中一个工具,但这就需要足够多的连接装置来控制水流,并且这也潜在需要在水喷射或压力冲洗后使用干燥装置。在使用水冲洗来清洗表面时,水压按照船体的尺寸来调整(用于游艇的水压小于用于大船的水压)。此外,特别对于大船,本发明的方法只包括定位船体,用水喷射清洗,以及在修理和/或涂漆前分析缺陷或轮廓的步骤。
图4D中是表示一种可互换的涂漆工具80的透视图,漆86通过喷嘴82涂在表面上,喷嘴82分别由导管85和87供给压缩气体84和漆86。涂漆工具80通过连接装置81可互换地固定在腕部36上。
应理解的是,上文以举例的方式公开了本发明的优选实施例,且对于那些本领域的一般技术人员来说,可以在不背离权利要求书的范围和精神的前提下进行修改和变动。
Claims (4)
1.使用包括多个机器人(14、22)的自动修整系统(10)分析船体(18)的船壳和上层建筑并对其进行精修和涂漆的计算机控制的装置,包括:
用于安装多个机器人(14、22)的可移动装置(16、20),所述可移动装置被布置成允许机器人可完全接近船体(18)的整个长度的各个地方,其中所述可移动装置包括布置在船壳一侧的导轨(16);
用于指示机器人(14、22)移动的控制器(12),所述控制器适于接收输入信号以使机器人(14、22)按照预先编制的步骤进行工作;
其中,所述机器人(14、22)中的每一个具有终止于支撑头(38)处的臂(32),所述支撑头(38)适于与可互换工具互锁,可互换工具包括分析器工具(50)、修整材料施加工具(60)和涂漆工具(80);
其中,所述分析器工具(50)包括适于根据所述控制器(12)中提供的表面测绘系统分析船体的表面(19)以检测轮廓及不完整处的激光或雷达(53);
其中,所述修整材料施加工具(60)包括被提供以高压气体和修整材料的喷嘴(62),所述修整材料施加工具根据所述控制器(12)中的所述表面测绘系统进行控制以修整所述不完整处;及
其中,所述涂漆工具(80)包括被提供以高压气体和漆的喷嘴(82)。
2.如权利要求1所述的装置,其中所述可移动装置还包括用于将机器人(22)安装在船体(18)的上层建筑的上面的台架(20)。
3.如权利要求1所述的装置,其中所述可互换工具还包括打磨工具(70),其包括打磨装置(72)和真空管(74),真空管用于清除因光整修整材料而产生的尘埃。
4.如权利要求1-3任一所述的装置,其中所述可互换工具还包括用于清洗表面(19)的水喷射装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/447,973 US6365221B1 (en) | 1999-11-23 | 1999-11-23 | Computer controlled method and apparatus for fairing and painting of marine vessel surfaces |
| US09/447,973 | 1999-11-23 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB001283383A Division CN1170727C (zh) | 1999-11-23 | 2000-11-17 | 计算机控制的用于船体表面修整和涂漆的方法及装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1535893A CN1535893A (zh) | 2004-10-13 |
| CN100457545C true CN100457545C (zh) | 2009-02-04 |
Family
ID=23778495
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB001283383A Expired - Fee Related CN1170727C (zh) | 1999-11-23 | 2000-11-17 | 计算机控制的用于船体表面修整和涂漆的方法及装置 |
| CNB2004100335514A Expired - Fee Related CN100457545C (zh) | 1999-11-23 | 2000-11-17 | 计算机控制的用于船体表面修整和涂漆的方法及装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB001283383A Expired - Fee Related CN1170727C (zh) | 1999-11-23 | 2000-11-17 | 计算机控制的用于船体表面修整和涂漆的方法及装置 |
Country Status (23)
| Country | Link |
|---|---|
| US (2) | US6365221B1 (zh) |
| EP (2) | EP1103310B1 (zh) |
| JP (1) | JP4022711B2 (zh) |
| KR (1) | KR100696252B1 (zh) |
| CN (2) | CN1170727C (zh) |
| AR (1) | AR026418A1 (zh) |
| AT (2) | ATE361151T1 (zh) |
| AU (1) | AU783497B2 (zh) |
| BR (1) | BR0005526B1 (zh) |
| CA (1) | CA2325285C (zh) |
| CY (1) | CY1106756T1 (zh) |
| DE (3) | DE60044831D1 (zh) |
| DK (1) | DK1103310T3 (zh) |
| ES (2) | ES2349866T3 (zh) |
| GR (1) | GR20010300056T1 (zh) |
| HK (1) | HK1034698A1 (zh) |
| MX (1) | MXPA00011503A (zh) |
| NZ (1) | NZ508330A (zh) |
| PT (1) | PT1103310E (zh) |
| RU (1) | RU2250141C2 (zh) |
| SG (2) | SG126715A1 (zh) |
| TW (1) | TW501948B (zh) |
| ZA (1) | ZA200006850B (zh) |
Families Citing this family (75)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6757586B2 (en) * | 2001-09-05 | 2004-06-29 | Abb Automation Inc. | Multiple arm robot arrangement |
| AU2002362669A1 (en) * | 2001-10-11 | 2003-04-22 | Laser Projection Technologies Inc. A Delaware Corporation | Method and system for visualizing surface errors |
| US6907318B2 (en) * | 2003-01-09 | 2005-06-14 | Advanced Tubing Technology, Inc. | Multi-station robotic welding assembly |
| US20060288756A1 (en) * | 2003-02-21 | 2006-12-28 | De Meurechy Guido D K | Method and apparatus for scanning corrosion and surface defects |
| US6923489B2 (en) * | 2004-01-05 | 2005-08-02 | Timothy J. Keys | Motorcycle protective cover |
| US7934467B2 (en) * | 2004-02-02 | 2011-05-03 | John Stephen Morton | Cost effective automated preparation and coating methodology for large surfaces |
| FR2872482B1 (fr) * | 2004-07-05 | 2007-09-21 | Ignaki Michel Albaina | Systeme automatise de nettoyage par ultrasons des parties immergees d'un bateau ou de toutes surfaces immergees flottantes |
| US8085388B2 (en) * | 2005-02-01 | 2011-12-27 | Laser Projection Technologies, Inc. | Laser radar projection with object feature detection and ranging |
| US7306339B2 (en) * | 2005-02-01 | 2007-12-11 | Laser Projection Technologies, Inc. | Laser projection with object feature detection |
| KR20070070733A (ko) * | 2005-12-29 | 2007-07-04 | 삼성중공업 주식회사 | 곡판 부재 계측 장치 |
| DE502007003013D1 (de) | 2006-05-11 | 2010-04-15 | Eew Maschb Gmbh | Tragstruktur für ein bearbeitungsgerät |
| US7974739B2 (en) * | 2006-06-27 | 2011-07-05 | Illinois Tool Works Inc. | System and method having arm with cable passage through joint to infrared lamp |
| WO2008092799A1 (en) * | 2007-01-30 | 2008-08-07 | Akzo Nobel Coatings International B.V. | Automated dent filling |
| WO2008110899A2 (en) | 2007-03-12 | 2008-09-18 | Azimut-Benetti S.P.A. | Method and plant for surface fairing a structure |
| US8218852B2 (en) * | 2007-05-08 | 2012-07-10 | Spirit Aerosystems, Inc. | System and method for repairing composite parts |
| US20090094292A1 (en) * | 2007-10-08 | 2009-04-09 | Lynn Hagan | Quality Assurance Tool Kit and Method |
| KR100897004B1 (ko) | 2007-11-06 | 2009-05-14 | 에스티엑스조선주식회사 | 선체외판 자율이동 도장장치 |
| EP2090506B1 (en) * | 2008-02-12 | 2010-04-28 | Vincenzo Rina | Mobile device for working hulls of marine vessels |
| US9375746B2 (en) * | 2008-06-05 | 2016-06-28 | Durr Systems Gmbh | Compact paint booth |
| US20100282026A1 (en) * | 2009-05-11 | 2010-11-11 | Baker Hughes Incorporated | Method and system for automated earth boring drill bit manufacturing |
| DE102009036838B4 (de) | 2009-08-10 | 2014-12-11 | Dürr Systems GmbH | Verfahren zum Glätten einer Oberfläche eines Bauteils, insbesondere von Großstrukturen |
| JP5025701B2 (ja) * | 2009-09-18 | 2012-09-12 | 株式会社ナカタ・マックコーポレーション | 垂下式塗装装置および塗装システム |
| US8386112B2 (en) * | 2010-05-17 | 2013-02-26 | Raytheon Company | Vessel hull robot navigation subsystem |
| CN101927391A (zh) * | 2010-08-27 | 2010-12-29 | 大连海事大学 | 对破损金属部件进行自动堆焊修复的方法 |
| ITMO20100263A1 (it) * | 2010-09-21 | 2012-03-22 | Vincenzo Rina | Apparecchiatura per la verniciatura di scafi di imbarcazioni navali o simili |
| KR101259822B1 (ko) * | 2010-11-12 | 2013-04-30 | 삼성중공업 주식회사 | 선체 블록 내부 작업용 이동 장치 및 선체 블록의 내부 작업 방법 |
| EP2457819A1 (en) * | 2010-11-26 | 2012-05-30 | The European Union, represented by the European Commission | Under-keel inspection system |
| AT510919A1 (de) * | 2010-12-16 | 2012-07-15 | Palfinger Systems Gmbh | Instandhaltungsvorrichtung |
| DE102011009998A1 (de) * | 2011-02-01 | 2012-08-02 | Airbus Operations Gmbh | Verfahren zur Herstellung eines Strömungskörpers mit einer Soll-Oberflächentexturierung und Laser-Materialabtragsvorrichtung |
| KR101284858B1 (ko) * | 2011-08-23 | 2013-07-09 | 삼성중공업 주식회사 | 도장 장치 |
| US20130122186A1 (en) | 2011-11-10 | 2013-05-16 | Hoppel Fabrication Specialties, Inc. | Method and apparatus for coating horizontal surfaces |
| CN103623969B (zh) * | 2012-08-27 | 2016-03-09 | 上海建冶科技工程股份有限公司 | 大型钢结构构件的自动化喷涂装置 |
| JP5832461B2 (ja) * | 2013-02-15 | 2015-12-16 | アイシン化工株式会社 | 高粘性塗料の塗布ノズル |
| US20140238296A1 (en) * | 2013-02-25 | 2014-08-28 | John F. Grimes | Automated Paint Application System |
| DE102013007917A1 (de) | 2013-05-10 | 2014-11-13 | Mankiewicz Gebr. & Co. (Gmbh & Co. Kg) | Zusammensetzung zur Herstellung von Spachtelmassen und Verfahren zur Herstellung und Verarbeitung der Spachtelmassen |
| WO2015021173A1 (en) | 2013-08-06 | 2015-02-12 | Laser Projection Technologies, Inc. | Virtual laser projection system and method |
| CN104511387B (zh) * | 2013-09-28 | 2016-09-14 | 沈阳新松机器人自动化股份有限公司 | 船体表面自动喷涂设备 |
| KR101577645B1 (ko) | 2013-10-17 | 2015-12-15 | 대우조선해양 주식회사 | 선체 외판용 자동 도장장치 및 선체 외판 자동 도장방법 |
| DE102013221431A1 (de) * | 2013-10-22 | 2015-04-23 | Freese Ag | Schleifroboter für einen Schiffsrumpf und Verfahren zum Schleifen eines Schiffsrumpfes |
| CN104624429A (zh) * | 2013-11-14 | 2015-05-20 | 沈阳新松机器人自动化股份有限公司 | 一种船体表面喷涂机器人 |
| US9861998B2 (en) * | 2014-04-07 | 2018-01-09 | Oria Collapsibles, Llc | Assembly for coating an article incorporating robotic subassemblies utilizing articulating spray arms and carousel conveyor with inlet and outlet locations for the article |
| CN105149148A (zh) * | 2014-08-12 | 2015-12-16 | 清华大学 | 大型复杂工件表面多机器人自动喷涂系统 |
| CN105751492B (zh) * | 2014-12-15 | 2018-05-18 | 广州光宝移动电子部件有限公司 | 三维对象及其制造方法 |
| US11305429B2 (en) * | 2015-10-13 | 2022-04-19 | ATENSOR Engineering and Technology Systems GmbH | Synchronization of multiple robots |
| CN105344516B (zh) * | 2015-10-23 | 2018-05-22 | 舟山欣臻船舶设计有限公司 | 一种8200t化学成品油船的涂漆装置 |
| US11534885B2 (en) | 2016-06-09 | 2022-12-27 | Yaborã Indústria Aeronáutica S.A. | Automated systems and processes for preparing vehicle surfaces, such as an aircraft fuselage, for painting |
| CN106312751A (zh) * | 2016-11-07 | 2017-01-11 | 华东交通大学 | 一种轨道车辆外墙涂装自动打磨系统 |
| CN106741602B (zh) * | 2016-11-15 | 2018-04-27 | 大连理工大学 | 一种船舶外板双机爬壁拖涂全覆盖无碾压轨迹作业方法 |
| CN106540833A (zh) * | 2016-12-07 | 2017-03-29 | 辽宁工程技术大学 | 船舶自动喷漆机 |
| KR101870705B1 (ko) * | 2017-05-26 | 2018-06-25 | 최준식 | 이동형 블라스팅 장치 |
| ES2695627A1 (es) * | 2017-05-31 | 2019-01-09 | Vilarino David Roca | Robot- máquina automática de pintado de estructuras (R-MAPE) |
| CN107600313A (zh) * | 2017-07-25 | 2018-01-19 | 广东加德伟自动化有限公司 | 一种船体分段机器人除锈和喷漆施工设计系统 |
| US10780550B2 (en) * | 2018-01-11 | 2020-09-22 | Anthony Cibilich | System for blast-cleaning a barge deck, sides, and fittings |
| CN110152916A (zh) * | 2018-02-14 | 2019-08-23 | 邑富有限公司 | 喷涂模块、使用此喷涂模块的侧喷涂胶设备及侧喷涂胶设备的操作方法 |
| BR102018008935B1 (pt) * | 2018-05-03 | 2021-09-28 | Petróleo Brasileiro S.A. - Petrobras | Dispositivo de limpeza e polimento de conexões de equipamentos submarinos |
| CN108791749B (zh) * | 2018-06-11 | 2019-10-01 | 芜湖恒安钢结构有限公司 | 一种船舶甲板清洁用的洒水设备 |
| CN108970866B (zh) * | 2018-07-19 | 2020-05-12 | 清华大学 | 一种大型船舶分段自动化涂装系统 |
| WO2020046952A1 (en) * | 2018-08-27 | 2020-03-05 | Ascend Robotics LLC | Automated construction robot systems and methods |
| CN111013882B (zh) * | 2018-10-09 | 2022-04-05 | 上海交通大学 | 面向船体分段的自动化行架式喷涂系统 |
| JP7152930B2 (ja) * | 2018-10-11 | 2022-10-13 | 株式会社Subaru | シール材吐出ノズルおよびシール材吐出装置 |
| CA3121959A1 (en) * | 2018-12-20 | 2020-06-25 | Akzo Nobel Coatings International B.V. | Process for spray-applying a non-aqueous two-component filler coating composition onto a substrate |
| US11110606B2 (en) * | 2019-01-02 | 2021-09-07 | The Boeing Company | Coordinating work within a multi-robot cell |
| CN109821687A (zh) * | 2019-03-04 | 2019-05-31 | 清研同创机器人(天津)有限公司 | 大型复杂工件表面多机器人自动喷涂系统 |
| CN110000792B (zh) * | 2019-04-26 | 2020-08-21 | 西湖大学 | 船壁清洗机器人的路径调整方法、装置、设备及存储介质 |
| CN111470005A (zh) * | 2020-05-27 | 2020-07-31 | 广船国际有限公司 | 一种船舶分段的外板涂装方法 |
| CN112974080A (zh) * | 2021-02-03 | 2021-06-18 | 北京东方昊为工业装备有限公司 | 一种大型桥梁组合式协同喷砂喷涂装置 |
| CN113399150B (zh) * | 2021-05-20 | 2023-07-25 | 青岛固德复材科技有限公司 | 一种安全头盔喷漆装置 |
| EP4154987A1 (en) * | 2021-09-27 | 2023-03-29 | Siemens Gamesa Renewable Energy A/S | Surface treatment vehicle and method for manufacturing a wind turbine blade |
| CN114148485B (zh) * | 2021-11-09 | 2022-12-30 | 中船澄西船舶修造有限公司 | 一种船舶底部漆面加工用上架支撑工装 |
| CN114887804B (zh) * | 2022-04-28 | 2023-07-21 | 江苏科技大学 | 船舶分段内舱双臂协同喷涂机器人 |
| IT202200011468A1 (it) * | 2022-05-31 | 2023-12-01 | Sapa S P A | Sistema e metodo ecologico di verniciatura monostrato di componenti per automobili |
| CN114939495B (zh) * | 2022-06-08 | 2023-05-23 | 江苏科钛机器人有限公司 | 一种船舶表面加工用具有自助攀爬结构的喷涂机器人 |
| CN115921168B (zh) * | 2023-02-10 | 2023-10-03 | 东莞市华纬涂装设备有限公司 | 一种多工位喷涂机械手 |
| CN115991268B (zh) * | 2023-03-24 | 2023-06-30 | 淄博首拓环境科技有限公司 | 一种用于船舶生产的环保型清洁装置 |
| CN117583522B (zh) * | 2023-12-07 | 2024-05-10 | 台州市承跃机械有限公司 | 一种摩托车生产用铝锻件锻造装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0165911A2 (en) * | 1984-06-22 | 1985-12-27 | VIANOVA S.p.A. | Method and robot platform for washing, sandblasting and painting in shipbuilding dry dock |
| US5067085A (en) * | 1989-05-15 | 1991-11-19 | Southwest Research Institute | Optical robotic canopy polishing system |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5867377A (ja) * | 1981-10-17 | 1983-04-21 | Toyota Motor Corp | 自動水研装置 |
| JPS5895558A (ja) | 1981-11-30 | 1983-06-07 | Mazda Motor Corp | 自動車ボデイ塗装用ロボツト |
| DE3211992A1 (de) * | 1982-03-31 | 1983-10-06 | Wagner Gmbh J | Verfahren und vorrichtung zum programmieren eines roboters, insbesondere farbspritzroboters |
| US4532148A (en) | 1983-04-01 | 1985-07-30 | General Motors Corporation | Robot painting system for automobiles |
| DE8322699U1 (de) * | 1983-08-06 | 1983-11-10 | Hermann Behr & Sohn Gmbh & Co, 7121 Ingersheim | Automatisch gesteuerte handhabungsvorrichtung |
| GB8331152D0 (en) * | 1983-11-22 | 1983-12-29 | Henderson & Co Ltd John M | Vessel nozzle cleaning apparatus |
| US4986664A (en) * | 1984-02-07 | 1991-01-22 | International Technical Associates | System and process for controlled removal of material to produce a desired surface contour |
| JPH065155B2 (ja) * | 1984-10-12 | 1994-01-19 | 住友金属工業株式会社 | 窯炉の炉壁補修装置 |
| CA1300366C (en) * | 1986-11-10 | 1992-05-12 | Kiyohiro Ichinose | Method of and apparatus for cleaning paint spray guns |
| FR2612875A1 (fr) * | 1987-03-26 | 1988-09-30 | Vanek Michel | Procede et dispositif pour nettoyer, lustrer et carener les bateaux, a flot |
| EP0455371A3 (en) * | 1990-04-24 | 1992-04-22 | Engineering Incorporated | Robotic carrier mechanism for aircraft maintenance |
| KR950011757B1 (ko) * | 1990-12-28 | 1995-10-10 | 마쓰다 가부시끼가이샤 | 차체의 불량도장부위 연마 방법및 그 장치 |
| US5571312A (en) | 1992-07-28 | 1996-11-05 | Cresco Inc., Sa. | Environmentally safe epoxy adhesive-copper hull coating and method |
| US5336304A (en) | 1992-07-28 | 1994-08-09 | Cresco, Inc., Sa. | Environmentally safe epoxy adhesive-copper hull coating and method |
| US5398632A (en) * | 1993-03-08 | 1995-03-21 | Mmc Compliance Engineering, Inc. | Apparatus and method for performing external surface work on ship hulls |
| US5487440A (en) * | 1993-05-18 | 1996-01-30 | Seemann; Henry R. | Robotic apparatus |
| FI101689B1 (fi) * | 1993-06-17 | 1998-08-14 | Robotic Technology Systems Fin | Menetelmä kappaleen käsittelemiseksi |
| FI955274A (fi) * | 1995-11-03 | 1997-05-04 | Robotic Technology Systems Fin | Työstösolu ja menetelmä kappaleen työstämiseksi |
| US5938501A (en) * | 1996-02-20 | 1999-08-17 | Wedin International, Inc. | Multi-axis processing machine and method for forming the interior and exterior surfaces of aquatic vehicles |
| US5737227A (en) | 1996-03-19 | 1998-04-07 | Consulex Corporation | Software planning program for coatings |
| US5858111A (en) * | 1997-01-21 | 1999-01-12 | Marrero; Lou | Aircraft maintenance apparatus and method of maintaining same |
| US5947051A (en) * | 1997-06-04 | 1999-09-07 | Geiger; Michael B. | Underwater self-propelled surface adhering robotically operated vehicle |
| KR19990016503A (ko) * | 1997-08-16 | 1999-03-05 | 문만기 | 자동차의 손상부(흠집) 부분도장 방법 |
| US5997951A (en) * | 1997-11-24 | 1999-12-07 | Lincoln Diagnostics, Inc. | Method of treating fiberglass boat hulls to repair, prevent and retard blisters |
| US6189473B1 (en) * | 1998-02-23 | 2001-02-20 | Remote Tools, Inc. | Contour-following apparatus for cleaning surfaces |
| EP0970811B1 (en) * | 1998-07-06 | 2005-09-21 | L.A.C. Corporation | Automatic painting device |
-
1999
- 1999-11-23 US US09/447,973 patent/US6365221B1/en not_active Expired - Lifetime
-
2000
- 2000-11-02 CA CA002325285A patent/CA2325285C/en not_active Expired - Fee Related
- 2000-11-09 AR ARP000105923A patent/AR026418A1/es active IP Right Grant
- 2000-11-17 CN CNB001283383A patent/CN1170727C/zh not_active Expired - Fee Related
- 2000-11-17 CN CNB2004100335514A patent/CN100457545C/zh not_active Expired - Fee Related
- 2000-11-17 TW TW089124353A patent/TW501948B/zh not_active IP Right Cessation
- 2000-11-20 AT AT00204086T patent/ATE361151T1/de not_active IP Right Cessation
- 2000-11-20 PT PT00204086T patent/PT1103310E/pt unknown
- 2000-11-20 DE DE60044831T patent/DE60044831D1/de not_active Expired - Lifetime
- 2000-11-20 EP EP00204086A patent/EP1103310B1/en not_active Expired - Lifetime
- 2000-11-20 ES ES07008535T patent/ES2349866T3/es not_active Expired - Lifetime
- 2000-11-20 ES ES00204086T patent/ES2157183T3/es not_active Expired - Lifetime
- 2000-11-20 DE DE1103310T patent/DE1103310T1/de active Pending
- 2000-11-20 EP EP07008535A patent/EP1813354B1/en not_active Expired - Lifetime
- 2000-11-20 DK DK00204086T patent/DK1103310T3/da active
- 2000-11-20 AT AT07008535T patent/ATE477059T1/de not_active IP Right Cessation
- 2000-11-20 DE DE60034646T patent/DE60034646T2/de not_active Expired - Lifetime
- 2000-11-21 KR KR1020000069146A patent/KR100696252B1/ko not_active IP Right Cessation
- 2000-11-22 RU RU2000129021/12A patent/RU2250141C2/ru not_active IP Right Cessation
- 2000-11-22 NZ NZ508330A patent/NZ508330A/en not_active IP Right Cessation
- 2000-11-22 MX MXPA00011503A patent/MXPA00011503A/es active IP Right Grant
- 2000-11-22 JP JP2000355401A patent/JP4022711B2/ja not_active Expired - Fee Related
- 2000-11-22 ZA ZA200006850A patent/ZA200006850B/xx unknown
- 2000-11-23 SG SG200300077A patent/SG126715A1/en unknown
- 2000-11-23 SG SG200007650A patent/SG98013A1/en unknown
- 2000-11-23 BR BRPI0005526-3A patent/BR0005526B1/pt not_active IP Right Cessation
- 2000-11-23 AU AU71805/00A patent/AU783497B2/en not_active Ceased
-
2001
- 2001-08-06 HK HK01105444A patent/HK1034698A1/xx not_active IP Right Cessation
- 2001-10-31 GR GR20010300056T patent/GR20010300056T1/el unknown
-
2002
- 2002-01-03 US US10/035,261 patent/US6562139B2/en not_active Expired - Lifetime
-
2007
- 2007-07-24 CY CY20071100989T patent/CY1106756T1/el unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0165911A2 (en) * | 1984-06-22 | 1985-12-27 | VIANOVA S.p.A. | Method and robot platform for washing, sandblasting and painting in shipbuilding dry dock |
| US5067085A (en) * | 1989-05-15 | 1991-11-19 | Southwest Research Institute | Optical robotic canopy polishing system |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100457545C (zh) | 计算机控制的用于船体表面修整和涂漆的方法及装置 | |
| US8455054B2 (en) | Automated wing painting system | |
| KR101516689B1 (ko) | 보수 장치 | |
| CN106181218A (zh) | 一种汽车铝合金轮毂再制造工艺 | |
| CN102189055A (zh) | 船体外板自动喷涂作业车 | |
| CN104842238A (zh) | 一种基于数字总线的智能自动打磨抛光单元及其使用方法 | |
| CN101356025A (zh) | 用于车身板件的成形工具的最终加工的设备和方法 | |
| CN207120858U (zh) | 一种船体表面油漆的激光清洗装置 | |
| KR102147944B1 (ko) | 차량 재도장 방법 | |
| CN114042695B (zh) | 一种飞机发动机风扇叶片清洗润滑设备 | |
| CN102462226A (zh) | 一种漆膜喷砂砂磨的木质家具及其制造方法和装置 | |
| CN106000836A (zh) | 汽车油罐车喷涂工艺 | |
| EP0346754A2 (de) | Verfahren zum Ausbessern von Fehlern in Anstrichen | |
| CN208663429U (zh) | 彩钢板表面残漆打磨治具 | |
| CN209648478U (zh) | 一种五金件的均匀喷砂打磨装置 | |
| CN219943309U (zh) | 一种钢轨修复用金属粉末喷洒装置 | |
| CN213626508U (zh) | 一种建筑工程用涂料喷涂装置 | |
| CN219255145U (zh) | 一种自动化打磨装置 | |
| KR20050039892A (ko) | 저압 스프레이건을 이용한 자동차 흠집 도장방법 | |
| DK202170532A1 (en) | Reblade | |
| CN117101937A (zh) | 一种汽车配件表面喷涂装置及工艺 | |
| WO2011078747A1 (en) | Method and apparatus for preparing a surface for bonding a glass pane to a window aperture of a vehicle passenger compartment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090204 Termination date: 20161117 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |