BR112014027043B1 - Aparelho para operação em tecido - Google Patents
Aparelho para operação em tecido Download PDFInfo
- Publication number
- BR112014027043B1 BR112014027043B1 BR112014027043-0A BR112014027043A BR112014027043B1 BR 112014027043 B1 BR112014027043 B1 BR 112014027043B1 BR 112014027043 A BR112014027043 A BR 112014027043A BR 112014027043 B1 BR112014027043 B1 BR 112014027043B1
- Authority
- BR
- Brazil
- Prior art keywords
- ultrasonic
- blade
- ultrasonic blade
- assembly
- circuit
- Prior art date
Links
- 230000007423 decrease Effects 0.000 claims abstract 2
- 239000004744 fabric Substances 0.000 claims description 4
- 238000005520 cutting process Methods 0.000 abstract description 11
- 238000005345 coagulation Methods 0.000 abstract description 2
- 230000015271 coagulation Effects 0.000 abstract description 2
- 238000002347 injection Methods 0.000 description 15
- 239000007924 injection Substances 0.000 description 15
- 239000000463 material Substances 0.000 description 12
- 238000005516 engineering process Methods 0.000 description 11
- 238000000034 method Methods 0.000 description 11
- 239000000853 adhesive Substances 0.000 description 8
- 230000001070 adhesive effect Effects 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 7
- 238000010348 incorporation Methods 0.000 description 7
- 238000003466 welding Methods 0.000 description 7
- 230000001112 coagulating effect Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 5
- 238000001356 surgical procedure Methods 0.000 description 5
- 238000004140 cleaning Methods 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 230000000717 retained effect Effects 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 3
- 230000006378 damage Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 239000012634 fragment Substances 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 210000003041 ligament Anatomy 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000010355 oscillation Effects 0.000 description 3
- 102000004169 proteins and genes Human genes 0.000 description 3
- 108090000623 proteins and genes Proteins 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000007373 indentation Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000002955 isolation Methods 0.000 description 2
- 230000014759 maintenance of location Effects 0.000 description 2
- 230000010358 mechanical oscillation Effects 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 238000003908 quality control method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- 229910001069 Ti alloy Inorganic materials 0.000 description 1
- 229910000883 Ti6Al4V Inorganic materials 0.000 description 1
- 239000004775 Tyvek Substances 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000009852 coagulant defect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013536 elastomeric material Substances 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 238000013467 fragmentation Methods 0.000 description 1
- 238000006062 fragmentation reaction Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000009419 refurbishment Methods 0.000 description 1
- 239000010980 sapphire Substances 0.000 description 1
- 229910052594 sapphire Inorganic materials 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000005493 welding type Methods 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00725—Calibration or performance testing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320074—Working tips with special features, e.g. extending parts blade
- A61B2017/320077—Working tips with special features, e.g. extending parts blade double edge blade, e.g. reciprocating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320088—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with acoustic insulation, e.g. elements for damping vibrations between horn and surrounding sheath
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320093—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing cutting operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320095—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw with sealing or cauterizing means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/037—Automatic limiting or abutting means, e.g. for safety with a frangible part, e.g. by reduced diameter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0814—Preventing re-use
Abstract
dispositivo ultrassônico para corte e coagulação. a presente invenção refere-se a um aparelho cirúrgico que compreende um corpo, um transdutor ultrassônico, um cabo e um atuador de extremidade. o transdutor ultrassônico é operável para converter energia elétrica em vibrações ultrassônicas. o cabo acopla o atuador de extremidade e o corpo um ao outro. o atuador de extremidade compreende uma lâmina ultrassônica em comunicação acústica com o transdutor ultrassônico. a lâmina ultrassônica inclui uma região de reentrância que tem uma pluralidade de reentrâncias. a região de reentrâncias é afunilada, de modo que a área da seção transversal da região de reentrância diminui ao longo do comprimento da região de reentrância. a lâmina ultrassônica também é curva, de modo que um eixo geométrico longitudinal central da lâmina ultrassônica se estende ao longo de uma trajetória curva. um circuito de referência é usado para detectar quedas de voltagem de valores desconhecidos durante a operação do aparelho cirúrgico.
Description
[001] Este pedido reivindica a prioridade do pedido provisório de patente US n° 61/640.227, intitulado "Ultrasonic Device for Cutting and Coagulating", depositado em 30 de abril de 2012, cuja revelação está aqui incorporado a título de referência.
[002] Este pedido também reivindica a prioridade do pedido pro visório de patente US n° 61/722.986, intitulado "Ultrasonic Device for Cutting and Coagulating", depositado em 06 de novembro de 2012, cuja revelação está aqui incorporado a título de referência.
[003] Uma variedade de instrumentos cirúrgicos incluem um atua- dor de extremidade com um elemento cortante que vibra em frequências ultrassônicas para cortar e/ou vedar tecidos (por exemplo, através da desnaturação de proteínas nas células do tecido). Esses instrumentos incluem elementos piezoelétricos que convertem potência elétrica em vibrações ultrassônicas que, por sua vez, são comunicadas ao longo de um instrumento de guia de ondas acústicas para o elemento de lâmina. A precisão do corte e da coagulação pode ser controlada pela técnica do cirurgião e através do ajuste do nível de potência, do gume da lâmina, da tração do tecido e da pressão da lâmina.
[004] Exemplos de instrumentos cirúrgicos ultrassônicos incluem as tesouras ultrassônicas HARMONIC ACE®, as tesouras ultrassôni- cas HARMONIC WAVE®, as tesouras ultrassônicas HARMONIC FOCUS® e as lâminas ultrassônicas HARMONIC SYNERGY®, todas produzidas pela Ethicon Endo-Surgery, Inc. de Cincinnati, Ohio, EUA. Outros exemplos de tais dispositivos e conceitos relacionados são apresentados na patente US n° 5.322.055, intitulada "Clamp Coagula- tor/Cutting System for Ultrasonic Surgical Instruments", concedida em 21 de junho de 1994, cuja revelação foi incorporada à presente invenção para fins de referência; na patente US n° 5.873.873, intitulada "Ultrasonic Clamp Coagulator Apparatus Having Improved Clamp Mechanism", concedida em 23 de fevereiro de 1999, cuja revelação está aqui incorporado a título de referência; na patente US n° 5.980.510, intitulada "Ultrasonic Clamp Coagulator Apparatus Having Improved Clamp Arm Pivot Mount", submetida em 10 de outubro de 1997, cuja revelação está aqui incorporado a título de referência; na patente US n° 6.325.811, intitulada "Blades with Functional Balance Asymmetries for use with Ultrasonic Surgical Instruments", concedida em 4 de dezembro de 2001, cuja revelação está aqui incorporado a título de referência; na patente US n° 6.773.444, intitulada "Blades with Functional Balance Asymmetries for Use with Ultrasonic Surgical Instruments", concedida em 10 de agosto de 2004, cuja revelação está aqui incorporado a título de referência; e na patente US n° 6.783.524, intitulada "Robotic Surgical Tool with Ultrasound Cauterizing and Cutting Instrument", concedida em 31 de agosto de 2004, cuja revelação está aqui incorporado a título de referência.
[005] Outos exemplos ainda deinstrumentos cirúrgicos ultrassôni- cos são revelados na publicação US n° 2006/0079874, intitulada "Tissue Pad for Use with an Ultrasonic Surgical Instrument", publicada em 13 de abril de 2006, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2007/0191713, intitulada "Ultrasonic Device for Cutting and Coagulating", publicada em 16 de agosto de 2007, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2007/0282333, intitulada "Ultrasonic Waveguide and Blade", publicada em 6 de dezembro de 2007, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2008/0200940, intitulada "Ultrasonic Device for Cutting and Coagulating", publicada em 21 de agosto de 2008, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2009/0105750, intitulada "Ergono mic Surgical Instruments", publicada em 23 de abril de 2009, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2010/0069940, intitulada "Ultrasonic Device for Fingertip Control", publicada em 18 de março de 2010, cuja revelação está aqui incorporado a título de referência; e na publicação US n° 2011/0015660, intitulada "Rotating Transducer Mount for Ultrasonic Surgical Instruments", publicada em 20 de janeiro de 2011, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2012/0029546, intitulada "Ultrasonic Surgical Instrument Blades", publicada em 2 de fevereiro de 2012, cuja revelação está aqui incorporado a título de referência; no pedido de patente US n° 13/538.588, submetido em 29 de junho de 2012, intitulado "Surgical Instruments with Articulating Shafts", cuja revelação está aqui incorporado a título de referência; e no pedido de patente US n° 13/657.553, submetido em 22 de outubro de 2012, intitulado "Flexible Harmonic Waveguide/Blades for Surgical Instruments", cuja revelação está aqui incorporado a título de referência.
[006] Ademais, alguns dos instrumentos cirúrgicos supracitados incluem um transdutor sem fio, como o apresentado na publicação US n° 2012/0112687, intitulada "Recharge System for Medical Devices", publicada em 10 de maio de 2012, cuja revelação está aqui incorporado a título de referência; na publicação US n° 2012/0116265, intitulada "Surgical Instrument with Charging Devices", publicada em 10 de maio de 2012, cuja revelação está aqui incorporado a título de referência; e/ou no pedido de patente US n° 61/410.603, submetido em 5 de novembro de 2010, intitulado "Energy-Based Surgical Instruments", cuja revelação está aqui incorporado a título de referência.
[007] Embora vários instrumentos e sistemas cirúrgicos tenham sido desenvolvidos e usados, acredita-se que ninguém antes dos inventores tenha desenvolvido ou usado a invenção descrita nas concretizações em anexo.
[008] Embora o relatório descritivo conclua com concretizações que especificamente indicam e distintamente reivindicam esta tecnologia, acredita-se que esta tecnologia será melhor compreendida a partir da descrição a seguir de certos exemplos tomados em conjunto com os desenhos anexos, nos quais os mesmos números de referência identificam os mesmos elementos e em que:
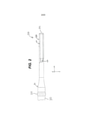
[009] a FIGURA 1 mostra uma vista em elevação lateral de um instrumento cirúrgico ultrassônico exemplificador;
[0010] a FIGURA 2 mostra uma vista em elevação esquerda de uma lâmina ultrassônica do instrumento cirúrgico da FIGURA 1;
[0011] a FIGURA 3 mostra uma vista em elevação direita da lâmi na ultrassônica da FIGURA 2;
[0012] a FIGURA 4 mostra uma vista em planta superior da lâmina ultrassônica da FIGURA 2;
[0013] a FIGURA 5 mostra uma vista em planta do fundo da lâmi na ultrassônica da FIGURA 2;
[0014] a FIGURA 6 mostra uma vista em planta superior da lâmina ultrassônica da FIGURA 2, com vários planos em seção transversal indicados;
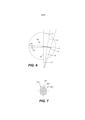
[0015] a FIGURA 7 mostra uma vista transversal da lâmina ultras- sônica da FIGURA 2, tomada ao longo da linha 7-7 da FIGURA 6;
[0016] a FIGURA 8 mostra uma vista transversal da lâmina ultras- sônica da FIGURA 2, tomada ao longo da linha 8-8 da FIGURA 6;
[0017] a FIGURA 9 mostra uma vista transversal da lâmina ultras- sônica da FIGURA 2, tomada ao longo da linha 9-9 da FIGURA 6;
[0018] a FIGURA 10 mostra uma vista em planta superior de uma lâmina ultrassônica alternativa exemplificadora adequada para incorporação ao instrumento da FIGURA 1;
[0019] a FIGURA 11 mostra uma vista em elevação lateral de uma porção de um guia de onda acústica do instrumento cirúrgico da FIGURA 1;
[0020] a FIGURA 12 mostra uma vista em planta superior da por ção do guia de onda acústica da FIGURA 11;
[0021] a FIGURA 13 mostra uma vista esquemática de um circuito exemplificador adequado para incorporação ao instrumento da FIGURA 1;
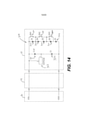
[0022] a FIGURA 14 mostra uma vista esquemática de um outro circuito exemplificador adequado para incorporação ao instrumento da FIGURA 1;
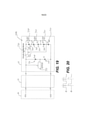
[0023] a FIGURA 15 mostra uma vista esquemática de um outro circuito exemplificador adequado para incorporação ao instrumento da FIGURA 1;
[0024] a FIGURA 16 mostra uma vista esquemática de um outro circuito exemplificador adequado para incorporação ao instrumento da FIGURA 1;
[0025] a FIGURA 17 mostra uma vista esquemática de um outro circuito exemplificador adequado para incorporação ao instrumento da FIGURA 1;
[0026] a FIGURA 18 mostra formatos de onda exemplificadores de saída dos circuitos das FIGURAS 15 a 17;
[0027] a FIGURA 19 mostra uma vista esquemática de um outro circuito exemplificador adequado para incorporação ao instrumento da FIGURA 1;
[0028] a FIGURA 20 mostra formatos de onda de saída exemplifi- cadores do circuito da FIGURA 19;
[0029] a FIGURA 21 mostra uma vista em perspectiva explodida de componentes da carcaça que podem ser incorporados ao instrumento da FIGURA 1;
[0030] a FIGURA 22 mostra uma vista parcial em perspectiva de uma primeira carcaça dos componentes da carcaça da FIGURA 21;
[0031] a FIGURA 23 mostra uma vista parcial em perspectiva de uma segunda carcaça dos componentes da carcaça da FIGURA 21;
[0032] a FIGURA 24 mostra uma vista parcial em elevação lateral da primeira carcaça da FIGURA 22, acoplada a um recurso de retenção exemplificador;
[0033] a FIGURA 25 mostra uma vista em perspectiva do recurso de retenção da FIGURA 24;
[0034] a FIGURA 26 mostra uma vista em perspectiva explodida de componentes da carcaça alternativos exemplificadores, que podem ser incorporados ao instrumento da FIGURA 1;
[0035] a FIGURA 27 mostra uma vista em elevação lateral de um primeiro componente exemplificador da carcaça do instrumento da FIGURA 1, com um orifício formado para facilitar a separação de um segundo componente da carcaça;
[0036] a FIGURA 28 mostra uma vista em elevação lateral de um segundo componente exemplificador da carcaça do instrumento da FIGURA 1, com um orifício formado para facilitar a separação de um primeiro componente da carcaça;
[0037] a FIGURA 29 mostra uma vista em planta superior de um conjunto de lâmina ultrassônica exemplificadora, incorporado ao instrumento da FIGURA 1;
[0038] a FIGURA 30 mostra uma vista lateral transversal do con junto de lâmina da FIGURA 29, tomada ao longo da linha 30-30 da FIGURA 29;
[0039] a FIGURA 31 mostra uma vista parcial superior de um conjunto de conexão do cabo de alimentação exemplificador, com uma metade da carcaça de um instrumento cirúrgico separada do conjunto de conexão e a outra metade da carcaça engatada com o conjunto de alimentação;
[0040] a FIGURA 32 mostra uma vista parcial superior de um con junto de conexão do cabo de alimentação exemplificador, com as metades da carcaça presas ao conjunto de conexão;
[0041] a FIGURA 33 mostra uma vista parcial lateral de um recur so de acoplamento exemplificador de uma das metades da carcaça da FIGURA 31; e
[0042] a FIGURA 34 mostra uma vista da extremidade das meta des da carcaça de um instrumento cirúrgico, separadas em torno de um outro conjunto de conexão exemplificador.
[0043] Os desenhos não pretendem ser limitadores de modo al gum, e contempla-se que várias modalidades da tecnologia podem ser executadas em uma variedade de outras maneiras, incluindo aquelas não necessariamente representadas nos desenhos. Os desenhos em anexo incorporados e formando uma parte do relatório descritivo ilustram vários aspectos da presente tecnologia, e em conjunto com a descrição servem para explicar os princípios da tecnologia; entende-se, entretanto, que esta tecnologia não se limita precisamente às disposições mostradas.
[0044] A seguinte descrição de alguns exemplos da tecnologia não devem ser usada para limitar o seu âmbito. Outros exemplos, elementos, aspectos, modalidades e vantagens da tecnologia se tornarão evidentes para os versados na técnica com a descrição a seguir, que é por meio de ilustrações, um dos melhores modos contemplados para realização da tecnologia. Conforme será compreendido, a tecnologia aqui descrita é capaz de outros aspectos diferentes e óbvios, todos sem se afastar da tecnologia. Conse-quentemente, os desenhos e descrições devem ser considera-dos como de natureza ilustrativa, e não restritiva.
[0045] É adicionalmente entendido que qualquer um ou mais dos ensinamentos, expressões, modalidades, exemplos, etc aqui descritos podem ser combinados com qualquer um ou mais dos outros ensinamentos, expressões, modalidades, exemplos, etc, que são descritos na presente invenção. Os ensinamentos, expressões, modalidades, exemplos, etc. descritos a seguir não devem ser vistos isoladamente em relação um ao outro. Várias maneiras adequadas, pelas quais os ensinamentos da presente invenção podem ser combinados, serão prontamente aparentes aos versados na técnica tendo em vista os ensinamentos da presente invenção. Essas modificações e variações são destinadas a estarem incluídas no escopo das concretizações anexas.
[0046] Para maior clareza da revelação, os termos "proximal" e "distal" são definidos na presente invenção em relação a um operador humano ou robótico do instrumento cirúrgico. O termo "proximal" refere-se à posição de um elemento mais próximo do operador humano ou robótico do instrumento cirúrgico e mais distante do atuador de extremidade cirúrgico do instrumento cirúrgico. O termo "distal" refere-se à posição de um elemento mais próximo do atuador de extremidade cirúrgico do instrumento cirúrgico e mais distante do operador humano ou robótico do instrumento cirúrgico.
[0047] A FIGURA 1 ilustra um instrumento cirúrgico ultrassônico exemplificador (10). Ao menos parte do instrumento (10) pode ser construída e operável de acordo com pelo menos alguns dos ensinamentos da patente US n° 5.322.055; da patente US n° 5.873.873; da patente US n° 5.980.510; da patente US n° 6.325.811; da patente US n° 6.773.444; da patente US n° 6.783.524; da publicação US n° 2006/0079874; da publicação US n° 2007/0191713; da publicação US n° 2007/0282333; da publicação US n° 2008/0200940; da publicação US n° 2009/0105750; da publicação US n° 2010/0069940; da publicação US n° 2011/0015660; da publicação US n° 2012/0112687; da pu- blicação US n° 2012/0116265; do pedido de patente US n° 13/538.588; do pedido de patente US n° 13/657.553; e/ou do pedido de patente US n° 61/410.603. As revelações de cada uma das patentes, publicações e pedidos supracitados estão aqui incorporados a título de referência. Conforme descrito nelas e conforme será descrito com mais detalhes abaixo, o instrumento (10) é operável para cortar tecidos e selar ou soldar tecidos (por exemplo, um vaso sanguíneo, etc.) substancialmente simultaneamente. Deve-se entender que o instrumento (10) pode ter várias semelhanças estruturais e funcionais com as tesouras ul- trassônicas HARMONIC ACE®, as tesouras ultrassônicas HARMONIC WAVE®, as tesouras ultrassônicas HARMONIC FOCUS® e/ou com as lâminas ultrassônicas HARMONIC SYNERGY®. Ademais, o instrumento (10) pode ter várias semelhanças estruturais e funcionais com os dispositivos ensinados em qualquer uma das outras referências citadas e incorporadas para fins de referência na presente invenção.
[0048] Até o ponto em que houver algum grau de sobreposição entre os ensinamentos das referência citadas na presente invenção, nas tesouras ultrassônicas HARMONIC ACE®, nas tesouras ultras- sônicas HARMONIC WAVE®, nas tesouras ultrassônicas HARMONIC FOCUS® e/ou nas lâminas ultrassônicas HARMONIC SYNERGY®, e nos ensinamentos a seguir relacionados ao instrumento (10), não se pretende que qualquer descrição contida na presente invenção seja entendida como reconhecida como técnica anterior. Pelo contrário, o escopo de vários dos ensinamentos da presente invenção é mais amplo que o escopo dos ensinamentos das referências citadas na presente invenção e das tesouras ultrassônicas HARMONIC ACE®, das tesouras ultrassônicas HARMONIC WAVE®, das tesouras ultrassônicas HARMONIC FOCUS® e das lâminas ul- trassônicas HARMONIC SYNERGY®.
[0049] O instrumento (10) do presente exemplo compreende um conjunto do pegador (20), um conjunto de haste (30) e um atuador de extremidade (40). O conjunto do pegador (20) compreende um corpo (22) incluindo uma empunhadura de pistola (24) e um par de botões (26). O conjunto do pegador (20) inclui também um gatilho (28) que é articulável na direção da empunhadura de pistola (24) e na direção contrária. Deve-se entender, entretanto, que várias outras configurações adequadas podem ser usadas, incluindo, mas não limitado a uma configuração de empunhadura de tesoura. O atuador de extremidade (40) inclui uma lâmina ultrassônica (100) e um braço de garra articulável (44). O braço de garra (44) é acoplada ao gatilho (28), de modo que o braço de garra (44) é articulável no sentido da lâmina ultras- sônica (100) em resposta à rotação do gatilho (28) no sentido da em- punhadura de pistola (24); e de modo que o braço de garra (44) é articulável na direção contrária da lâmina ultrassônica (100), em resposta à rotação do gatilho (28) na direção contrária da empunhadura de pistola (24). Várias maneiras adequadas através das quais o braço de garra (44) pode ser acoplado ao gatilho (28) se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção. Em algumas versões, um ou mais membros resilientes são usados para inclinar o braço de garra (44) e/ou o gatilho (28) para a posição aberta mostrada na FIGURA 1.
[0050] Um conjunto de transdutor ultrassônico (12) se estende de maneira proximal do corpo (22) do conjunto do pegador (20). O conjunto transdutor (12) é acoplado a um gerador (16) através de um cabo (14). O conjunto transdutor (12) recebe potência elétrica do gerador (16) e converte tal potência em vibrações ultrassônicas através de princípios piezoelétricos. O gerador (16) pode incluir uma fonte de potência e um módulo de controle que é configurado para fornecer um perfil de potência ao conjunto transdutor (12), que é especialmente adequado para a geração de vibrações ultrassônicas através do con- junto transdutor (12). Somente a título de exemplo, o gerador (16) pode compreender um GEN 300 vendido pela Ethicon Endo-Surgery, Inc. de Cincinnati, Ohio, EUA. Além disso ou na alternativa, o gerador (16) pode ser construído de acordo com pelo menos alguns dos ensinamentos da Publicação US n° 2011/0087212, intitulada "Surgical Generator for Ultrasonic and Electrosurgical Devices", publicada em 14 de abril de 2011, cuja revelação está incorporado à presente invenção a título de referência. Deve-se entender também que pelo menos algumas das funcionalidades do gerador (16) podem ser integradas no conjunto do pegador (20), e que o conjunto do pegador (20) pode até incluir uma bateria ou outra fonte de potência embutida, de modo que o cabo (14) é omitido. Ainda outras formas adequadas que o gerador (16) pode assumir, bem como vários recursos e funcionalidades que o gerador (16) pode fornecer, serão aparentes para os versados na técnica a partir dos ensinamentos da presente invenção.
[0051] Vibrações ultrassônicas geradas pelo conjunto transdutor (12) são comunicadas ao longo de um instrumento que mede ondas elétricas acústico (150) (mostrado nas FIGURAS 11-12), que se estende através do conjunto de haste (30) para chegar à lâmina ultras- sônica (100). A lâmina (100) é, portanto, operável para cortar eficazmente e unir tecidos, especialmente quando o tecido está sendo preso entre o braço de garra (44) e a lâmina (100). Deve-se entender que o guia de ondas (150) pode ser configurado para amplificar vibrações magnéticas transmitidas através do guia de ondas (150). Ademais, o guia de ondas (150) pode incluir recursos operáveis para controlar o ganho das vibrações longitudinais ao longo do guia de ondas (150) e/ou recursos para sintonizar o guia de ondas (150) com a frequência ressonante do sistema. Os botões (26) são operáveis para ativar seletivamente o conjunto transdutor (12) e, assim, ativar a lâmina ultrassô- nica (100). No presente exemplo, dois botões (26) são fornecidos - um para ativar a lâmina ultrassônica (100) com uma potência baixa e outro para ativar a lâmina ultrassônica (100) com uma potência alta. No entanto, deve-se entender que pode ser fornecido qualquer outro número adequado de botões e/ou níveis de potência selecionáveis.
[0052] No presente exemplo, a extremidade distal da lâmina ultras- sônica (100) fica localizada em uma posição que corresponde a um an- tinó associado a vibrações ultrassônicas ressonantes, comuni-cadas através do guia de ondas, para sintonizar o conjunto acústico à frequência ressonante preferida fo quando o conjunto acústico não está carregado com tecido. Quando o conjunto transdutor (12) está ener- gizado, a extremidade distal da lâmina ultrassônica (100) é configurada para se mover longitudinalmente na faixa de, por exemplo, aproximadamente 10 a 500 mícrons de pico a pico e, em alguns casos, na faixa de cerca de 20 a cerca de 200 mícrons em uma frequência vibratória fo predeterminada de, por exemplo, 55,5 kHz. Quando o conjunto transdutor (12) do presente exemplo está ativado, essas oscilações mecânicas são transmitidas através do guia de ondas para chegar à lâmina ultrassônica (100), causando assim a oscilação da lâmina ultrassônica (100) na frequência ultrassônica ressonante. Portanto, quando o tecido está preso entre a lâmina ultrassônica (100) e o braço de garra (44), a oscilação ultrassônica da lâmina ultrassônica (100) pode simultaneamente cortar o tecido e desnaturar as proteínas nas células do tecido adjacente, criando assim um efeito coagulante com relativamente pouca propagação térmica. Quando o conjunto transdutor (12) e a lâmina ultrassônica (100) não estão energizados, o braço de garra (44) pode ser girado em relação à lâmina ultrassônica (100) para segurar e manipular tecidos, sem cortar ou danificar o tecido.
[0053] Em algumas versões, uma corrente elétrica pode também ser fornecida através da lâmina ultrassônica (100) e do braço de garra (44) para cauterizar também o tecido. Embora algumas configurações para um conjunto de transmissão acústica e conjunto transdutor (12) tenham sido descritas, outras configurações adequadas para um conjunto de transmissão acústica e conjunto transdutor (12) ainda se tornarão aparentes aos versados na técnica, com base nos ensinamentos da presente invenção. De modo similar, outras configurações adequadas para o atuador de extremidade (40) se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0054] No presente exemplo, o conjunto de haste (30) é configurado para se acoplar seletivamente ao conjunto transdutor (12). Para auxiliar no devido acoplamento, uma chave dinamométrica (não mostrada) pode ser incluída no conjunto de haste (30). Tal chave dinamométrica pode ser configurada para facilitar a preensão do conjunto de haste (30), conforme o conjunto de haste (30) é girado em relação ao conjunto transdutor (12) durante o acoplamento. Além disso, tal chave dinamométrica pode ser configurada para fornecer retorno audível e/ou tátil quando o torque ade-quado é atingido para promover o acoplamento do conjunto transdutor (12) e do conjunto de haste (30) com o aperto adequado. Por exemplo, uma chave dinamométrica pode fornecer um par de cliques audíveis e táteis quando o devido nível de torque/preensão é atingido. Outras variações de uma chave dinamométrica serão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção. Ademais, deve-se entender que uma chave dinamométrica pode sim-plesmente ser omitida, se for desejado.
[0055] Em algumas versões, o conjunto de haste (30) inclui uma seção de articulação que possibilita ao atuador de extremidade (40) ser desviado lateralmente de modo angular, na direção contrária do eixo geométrico longitudinal definido pelo conjunto de haste (30). Somente a título de exemplo, tal seção de articulação pode ser configurada de acordo com um ou mais dos ensinamentos da publicação US n° 2012/0078247, cuja revelação foi incorporada à presente invenção para fins de referência. Como outro exemplo meramente ilustrativo, tal seção de articulação pode ser configurada de acordo com um ou mais dos ensinamentos do pedido de patente US n° 13/538.588 e/ou do pedido de patente US n° 13/657.553, cujas revelações estão incorporadas à presente invenção para fins de referência. Naturalmente, algumas versões do conjunto de haste (30) podem simplesmente não ter articulação. O conjunto de haste (30) do presente exemplo compreende um botão (32) que é operável para girar o conjunto de haste (30) e o atuador de extremidade (40) em relação ao conjunto do pegador (20), em torno do eixo geométrico longitudinal do conjunto de haste (30). Entretanto, deve-se entender que o botão (32) e a habilidade de girar do conjunto de haste (30) são meramente opcionais.
[0056] Os componentes supracitados e funcionalidades do instru mento (10) são meramente ilustrativos. O instrumento (10) pode ser configurado de diversas outras formas, conforme se tornará aparente para os versados na técnica, com base nos ensinamentos da presente invenção. Somente a título de exemplo, ao menos parte do instrumento (10) pode ser construída e/ou operável de acordo com pelo menos alguns dos ensinamentos de qualquer um dos seguintes, cujas revelações estão todas incorporadas à presente invenção para fins de referência: Patente US n° 5.322.055; Patente US n° 5.873.873; Patente US n° 5.980.510; Patente US n° 6.325.811; Patente US n° 6.773.444; Patente US n° 6.783.524; Publicação US n° 2006/0079874; Publicação US n° 2007/0191713; Publicação US n° 2007/0282333; Publicação US n° 2008/0200940; Publicação US n° 2009/0105750; Publicação US n° 2010/0069940; Publicação US n° 2011/0015660; Publicação US n° 2012/0112687; Publicação US n° 2012/0116265; Pedido de patente US n° 13/538.588; Pedido de patente US n° 13/657.553; e/ou pedido de patente US n° 61/410.603. Variações adicionais do instrumento (10) serão descritas com mais detalhes abaixo. Deve-se entender que as variações descritas abaixo podem ser prontamente aplicadas a qualquer dos instrumentos referidos em qualquer das referências citadas na presente invenção, dentre outras.
[0057] As FIGURAS 2 a 9 mostram a lâmina ultrassônica (100) do instrumento (10) com mais detalhes. A lâmina ultrassônica (100) do presente exemplo está sob a forma de uma lâmina curva, multi-funcional, afunilada, com assimetrias funcionais e movimento não desejável minimizado. Deve-se entender que o fornecimento de uma versão curva da lâmina ultrassônica (100) introduz um conjunto de considerações de engenharia que pode precisar ser abordado. Por exemplo, uma lâmina ul- trassônica curva (100) pode precisar ser devidamente equilibrada, incluindo posicionamento da massa ao longo do atuador de extremidade (40). Um outro aspecto de um equilíbrio adequado pode incluir um desejo de equilibrar separadamente deslo-camentos ortogonais encontrados por uma lâmina ultrassônica (100) ativada, o que pode ser especiamnete desafiador quando a lâmina (100) é curva. Além disso, uma lâmina ultras- sônica curva (100) pode ter propensão a fraturas devido a altas tensões na região curva da lâmina (100), especialmente se a lâmina (100) entrar em contato com metais quando a lâmina (100) estiver em um estado ativado. Ademais, uma lâmina ultrassônica curva (100) pode fornecer um comprimento ativo relativamente mais curto que pode, por sua vez, limitar o tamanho do vaso (ou outra estrutura de tecido) em que a lâmina (100) pode operar. ("Comprimento ativo" pode ser definido como o comprimento da extremidade distal (102) da lâmina (100) até onde o deslocamento é metade do deslocamento na sua extremidade distal (102).) As considerações supracitadas referem-se à lâmina (100) do presente exemplo.
[0058] Tendo abordado as considerações de engenharia men cionadas acima, deve-se também entender que a configuração curva e afunilada da lâmina (100) pode fornecer benefícios cirúrgicos, como melhora da visibilidade do cirurgião. Além disso, a curvatura e inclinação podem, juntas, fornecer um comprimento ativo mais longo, através de uma maior velocidade do som e redução progressiva em massa. Ademais, a inclinação pode resultar em uma superfície menor na extremidade distal (102), que pode melhorar a capacidade de perfura- ção/dissecção mediante o aumento da pressão local exercida sobre o tecido. O bom desempenho pode ser melhorado através do controle da razão entre o estresse acústico e o estresse de flexão da porção exposta da lâmina (100). A lâmina (100) pode, portanto, ser menos sensível ao dano resultante do contato acidental com outros materiais metálicos para aprimorar sua durabilidade.
[0059] A lâmina (100) do presente exemplo é posicionada na ex tremidade distal do guia de ondas (150). A extremidade proximal do guia de ondas (150) é acoplada com o conjunto transdutor (12). Portanto, a lâmina (100) e o guia de ondas (150), juntos, definem um conjunto de transmissão acústica que é acoplado acusticamente com o conjunto transdutor (12). Somente a título de exemplo, esse conjunto de transmissão acústica pode ter aproximadamente 36 cm de comprimento, aproximadamente 23 cm de comprimento, ou qualquer outro comprimento adequado. No presente exemplo, a extremidade distal (102) da lâmina ultrassônica (42) está localizada em uma posição que corresponde a um antinó associado com vibrações ultrassônicas ressonantes, comunicadas através do guia de ondas (150), para sintonizar o conjunto de transmissão acústica em uma frequência ressonante preferida fo quando o conjunto de transmissão acústica não está carregado com tecido. A lâmina (100) e o guia de ondas (150) são integral-mente formados neste exemplo, embora a lâmina (100) e o guia de ondas (150) possam alternativamente ser formados como peças separadas que são unidas (por exemplo, através de um acomplamento rosqueado, encaixe por atrito, junta soldada, etc.). Pode-se entender que a lâmina (100) termina eficazmente de maneira proximal no nó mais distal associado com as vibrações ultrassônicas ressonantes, comunicadas através do guia de ondas (150). Em outras palavras, a lâmina (100) se estende do nó mais distal ao antinó mais distal.
[0060] Quando o conjunto transdutor (12) está energizado, a ex tremidade distal (102) da lâmina ultrassônica (100) é configurada para se mover longitudinalmente (ao longo do eixo geométrico x) na faixa de, por exemplo, aproximadamente 10 a 500 mícrons de pico a pico e, em alguns exemplos, na faixa de cerca de 20 a cerca de 200 mícrons, em uma frequência vibratória predeterminada fo de, por exemplo, 55,5 kHz. Quando o conjunto transdutor (12) do presente exemplo é ativado, essas oscilações mecânicas são transmitidas através do guia de ondas (150) para chegar à lâmina ultrassônica (100), promovendo assim a oscilação da lâmina ultrassônica (100) na frequência ultrassônica ressonante. Portanto, quando o tecido é fixado entre a lâmina ultras- sônica (100) e o braço de garra (44), a oscilação ultrassônica da lâmina ultrassônica (100) pode simultaneamente cortar o tecido e desnaturar as proteínas nas células do tecido adjacente, criando assim um efeito coagulante com relativamente pouca propagação térmica.
[0061] A lâmina (100) do presente exemplo é afunilada na sua ex tremidade proximal no sentido da sua extremidade distal (102). A lâmina (100) também é curva, de modo que o centro da extremidade distal (102) está posicionado lateralmente ao eixo geométrico longitudinal, definido pelo guia de ondas (150). Deve-se entender que determinados recursos de equilíbrio podem ser necessários para manter o movimento longitudinal substancialmente ao longo do eixo geométrico x e dentro do plano x-y, bem como para separar as faixas de vibração do modo transversal na direção contrária do modo de vibração longitudinal desejado, a uma frequência ressonante de 55,5 kHz. Conforme será descrito com mais deta- lhes abaixo, o guia de ondas (150) inclui uma série de etapas de ganho, configuradas para fornecer um ganho de aproximadamente 3,5, de modo que a extremidade distal (102) da lâmina (100) vibre ao longo do eixo geométrico x a uma excursão máxima de aproximadamente 73,5 mícrons no nível máximo de geração de potência (por exemplo, de modo que a excursão do transdutor (150) seja de aproximadamente 21,5 mícrons).
[0062] O afunilamento da lâmina (100) é melhor visto nas FIGU RAS 7 a 9, que mostram um conjunto de seções transversais em vários pontos ao longo do comprimento da lâmina (100). Especificamente, a FIGURA 7 mostra uma seção transversal proximal da lâmina (100), ao longo de um plano que passa ao longo de um eixo geométrico (PA), que é perpendicular ao eixo geométrico longitudinal do guia de ondas (150). A FIGURA 8 mostra uma seção transversal intermediária da lâmina (100) ao longo de um primeiro plano que é obliquamente orientado em relação ao eixo geométrico (PA). A FIGURA 9 mostra uma seção transversal distal (100), ao longo de um segundo plano que é obliquamente orientado em relação ao eixo geométrico (PA). No presente exemplo, a largura da lâmina (100) na seção transversal mostrada na FIGURA 7 é de entre cerca de 0,14 cm (0,055 polegadas) e cerca de 0,18 cm (0,070 polegadas), e, mais especificamente, entre cerca de 0,15 cm (0,060 polegadas) e cerca de 0,17 cm (0,065 polegadas). A largura da lâmina (100) na seção transversal mostrada na FIGURA 8 é de entre cerca de 0,11 cm (0,045 polegadas) e cerca de 0,15 cm (0,060 polegadas), e, mais especificamente, entre cerca de 0,13 cm (0,050 polegadas) e cerca de 0,14 cm (0,055 polegadas). A largura da lâmina (100) na seção transversal mostrada na FIGURA 9 é de entre cerca de 0,089 e 0,127 cm (entre cerca de 0,035 e 0,050 polegadas), e, mais especificamente, entre cerca de 0,10 cm (0,040 polegadas) e cerca de 0,11 cm (0,045 polegadas). É claro que, quaisquer outras dimensões adequadas podem ser usadas.
[0063] As curvaturas e inclinação da lâmina (100) são definidas por simples cortes radiais, bem como cortes radiais compostos mais complexos feitos em um cilindro de base curva. Esses cortes definem uma pluralidade de recursos de equilíbrio (110, 112, 114, 120). Especificamente, e conforme se pode observar melhor na FIGURA 4, um primeiro recurso de equilíbrio (110) é formado por um corte côncavo lateral com um primeiro raio de curvatura (R1). Somente a título de exemplo, o primeiro raio de curvatura (R1) pode ser entre cerca de 0,508 cm (0,200 polegadas) e cerca de 0,635 cm (0,250 polegadas), e, mais especificamente, cerca de 0,572 cm (0,225 polegadas). Naturalmente, qualquer outro valor adequado pode ser usado para o primeiro raio de curvatura (R1). No presente exemplo, o primeiro recurso de equilíbrio (110) é definido pelo primeiro raio de curvatura (R1) arrastado ao longo de um plano ortogonal x-y que passa pelo eixo geométrico longitudinal do conjunto de haste (30). Um segundo recurso de equilíbrio (112) é formado por um corte côncavo lateral com um segundo raio de curvatura (R2) arrastado ao longo de um plano ortogonal x-y que passa pelo eixo geométrico longitudinal do conjunto de haste (30). Somente a título de exemplo, o segundo raio de curvatura (R2) pode ser de entre cerca de 0,635 cm (0,250 polegadas) e cerca de 0,699 cm (0,275 polegadas), e, mais especificamente, cerca de 0,681 cm (0,268 polegadas). Naturalmente, quaisquer outras dimensões adequadas podem ser usadas para o segundo raio de curvatura (R2). No presente exemplo, o segundo recurso de equilíbrio (112) é contrabalanceado a partir do primeiro recurso de equilíbrio (110) ao longo do comprimento da lâmina (100). Especificamente, o segundo recurso de equilíbrio (112) fica localizado mais distalmente que o primeiro recurso de equilíbrio (110) por entre cerca de 0,005 cm (0,002 polegadas) e cerca de 0,025 cm (0,010 polegadas), e, mais especificamente, cerca de 0,013 cm (0,005 polegadas). Alterna-tivamente, qualquer outro contrapeso adequado (ou nenhum contra-peso) pode ser usado. No presente exemplo, o segundo recurso de equilíbrio (112) é definido pelo segundo raio de curvatura (R2) arrastado ao longo do mesmo plano ortogonal x-y que passa pelo eixo geométrico longitudinal do conjunto de haste (30), como o plano ortogonal x-y associado ao primeiro recurso de equilíbrio (110) e ao primeiro raio de curvatura (R1).
[0064] Um terceiro recurso de equilíbrio (114) se estende de modo circunferencial ao redor da lâmina (100) e é formado por um corte côncavo que tem um terceiro raio de curvatura (R3). Somente a título de exemplo, o terceiro raio de curvatura (R3) pode ser de entre cerca de 1,52 cm (0,600 polegadas) e cerca de 1,78cm (0,700 polegadas), e, mais especificamente, cerca de 1,7cm (0,650 polegadas). Naturalmente, quaisquer outras dimen-sões adequadas podem ser usadas para o terceiro raio de curvatura (R3).
[0065] Um quarto recurso de equilíbrio (120) é melhor visto nas FI GURAS 4 e 7-8. O quarto recurso de equilíbrio (120) é formado como uma reentrância que se estende longitudinalmente em um canto da lâmina (100). A reentrância do recurso de equilíbrio (120) é definida por um quarto raio de curvatura (R4) que é arrastado ao longo do plano x-y e um quinto raio de curvatura (R5) que é arrastado ao longo do plano y- z. Somente a título de exemplo, o quarto raio de curvatura (R4) pode ser de entre aproximadamente 3,43 cm (1,350 polegadas) e aproximadamente 3,620cm (1,425 polegadas), e, mais especificamente, cerca de 3,543cm (1,395 polegadas). Alternativamente, quaisquer outras dimensões adequadas podem ser usadas para o quarto raio de curvatura (R4). No presente exemplo, o plano x-y ao longo do qual o quarto raio de curvatura (R4) é arrastado, é paralelo ao e ainda distanciado do plano x-y ao longo do qual os primeiro e segundo raios de curvatura (R1, R2) são arrastados. Também somente a título de exemplo, o quinto raio de curvatura (R5) pode ser de entre aproximadamente 0,15 cm (0,060 polegadas) e aproximadamente 0,17 cm (0,065 polegadas), e, mais especificamente, cerca de 0,16 cm (0,062 polegadas). Alternati-vamente, quaisquer outras dimensões adequadas podem ser usadas para o quinto raio de curvatura (R5). O quarto recurso de equilíbrio (120) pode ser configurado para equilibrar o movimento da lâmina (100), conforme descrito na patente US n° 6.773.444, cuja revelação foi incorporada à presente invenção para fins de referência. Além disso, o quarto recurso de equilíbrio (120) apresenta uma borda (122), que pode ser usada para cortar tecidos para trás e/ou para outros fins. Em algumas versões do instrumento (10) que têm um braço de garra (44), a lâmina ultrassônica (100) é orientada de modo que a borda (122) fica voltada para o braço de garra (44). Em algumas outras versões do instrumento (10) que têm um braço de garra (44), a lâmina ultrassônica (100) é orientada de modo que a borda (122) fica voltada par a direção contrária do braço de garra (44).
[0066] Como pode ser visto na FIGURA 4, o corte côncavo lateral do segundo recurso de equilíbrio (112) se transforma em uma curva convexa que se estende para a extremidade distal (102). Essa curva convexa é definida por um sexto raio de curvatura (R6) arrastado ao longo de um plano ortogonal x-y, que passa através do eixo geométrico longitudinal do conjunto de haste (30). Somente a título de exemplo, o sexto raio de curvatura (R6) pode ser de aproximadamente 3,673 cm (1,446 polegadas). Naturalmente, quaisquer outras dimensões adequadas podem ser usadas para o sexto raio de curvatura (R6).
[0067] A FIGURA 10 mostra uma lâmina ultrassônica (200) alter nativa exemplificadora que pode estar localizada na extremidade distal do guia de ondas (150). A lâmina (200) deste exemplo é substancialmente semelhante à lâmina (100) descrita acima e inclui uma extremidade distal (202) e uma pluralidade de recursos de equilíbrio (210, 212, 214, 220). Em algumas versões, a lâmina (100) tem aproximadamente 36 centímetros de comprimento, ao passo em que a lâmina (200) tem aproximadamente 23 centímetros de comprimento. É claro que, quaisquer outras dimensões adequadas podem ser usadas. As diferenças nos raios de curvatura associados à lâmina (200) podem ser selecionadas para determinar que a lâmina (200) tenha um comprimento menor que a lâmina (100).
[0068] No exemplo mostrado na FIGURA 10, os recursos de equi líbrio (210, 212) da lâmina (200) são substancialmente idênticos aos respectivos recursos de equilíbrio (110, 112) da lâmina (100), incluindo tendo os mesmos raios de curvatura como recursos de equilíbrio (110, 112). Embora o recurso de equilíbrio (220) da lâmina (200) também seja semelhante ao recurso de equilíbrio (120) da lâmina (100), o recurso de equilíbrio (220) é definido por raios de curvatura (R7, R8) que diferem dos respectivos raios de curvatura (R4, R5) que definem o recurso de equilíbrio (120). Especificamente, a reentrância do recurso de equilíbrio (220) é definida por um sétimo raio de curvatura (R7) que é arrastado ao longo do plano x-y e um oitavo raio de curvatura (R8) que é arrastado ao longo do plano y-z. Somente a título de exemplo, o sétimo raio de curvatura (R7) pode ser de entre 3,531cm (1,390 polegadas) e aproximadamente 3,8cm (1,500 polegadas), e, mais especificamente, cerca de 3,607cm (1,420 polegadas). Em algumas outras versões, o sétimo raio de curvatura (R7) é de aproximadamente 3,543cm (1,395 polegadas). Alternativamente, quaisquer outras dimensões adequadas podem ser usadas para o sétimo raio de curvatura (R7). Também somente a título de exemplo, o oitavo raio de curva-tura (R8) pode ser de entre 2,54 cm (1,000 polegadas) e aproximadamente 3,048 cm (1,200 polegadas), e, mais especificamente, cerca de 2,794cm (1,100 polegadas). Em algumas outras versões, o oitavo raio de curvatura (R8) é de aproximadamente 3,543cm (1,395 polegadas). Alternativamente, quaisquer outras dimensões adequadas podem ser usadas para o oitavo raio de curvatura (R8).
[0069] A lâmina (200) da FIGURA 10 também tem um recurso de equilíbrio (214) que se estende de modo circunferencial, definido por um nono raio de curvatura (R9) que é de aproximadamente 3,81 cm (1,500 polegadas). Alternativamente, quaisquer outras dimensões adequadas podem ser usadas para o nono raio de curvatura (R9). O corte côncavo lateral do recurso de equilíbrio (212) se transforma em uma curva convexa que se estende para a extremidade distal (202). Essa curva convexa é definida por um décimo raio de curvatura (R10), arrastado ao longo de um plano ortogonal x-y que passa pelo eixo geométrico longitudinal do conjunto de haste (30). Somente a título de exemplo, o décimo raio de curvatura (R10) pode ser de aproximadamente 3,543 cm (1,395 polegadas). Naturalmente, quaisquer outras dimensões adequadas podem ser usadas para o décimo raio de curvatura (R10). Conforme observado acima, em alguns casos uma lâmina ultrassônica que tem um comprimento de aproximadamente 36 cm é configurada de acordo com a lâmina (100); ao passo em que uma lâmina ultrassônica que tem um comprimento de aproximadamente 23 cm é configurada de acordo com a lâmina (200). Alternativamente, a configuração de qualquer das lâminas (100, 200) pode ser combinada com qualquer outro comprimento de lâmina ultrassônica adequado.
[0070] As FIGURAS 11 a 12 mostram o guia de ondas (150) do presente exemplo com mais detalhes. o guia de ondas (150) pode ser flexível, semiflexível ou rígido. o guia de ondas (150) pode também ser configurado para amplificar as vibrações mecânicas transmitidas através do guia de ondas (150) para a lâmina (100), como é bem conhecido na técnica. o guia de ondas (150) pode ainda ter recursos para controlar o ganho de vibração longitudinal ao longo do guia de ondas (150), bem como recursos para sintonizar o guia de ondas (150) à frequência ressonante do sistema. Especificamente, o guia de ondas (150) pode ter qualquer dimensão em seção transversal adequada. Por exemplo, o guia de ondas (150) pode ser afunilado em várias seções para controlar o ganho de vibração longitudinal. o guia de ondas (150) pode, por exemplo, ter um comprimento substancialmente igual a um número integral de comprimentos de onda de metade do sistema (nl/2). O guia de ondas (150) e a lâmina (100) podem ser preferencialmente fabricados a partir de um núcleo central sólido, construído de material que propaga energia ultrassônica eficazmente, como uma liga de titânio (por exemplo, Ti-6Al-4V), ligas de alumínio, safira, aço inoxidável ou qualquer outro material acusticamente compatível. O guia de ondas (150) pode incluir também pelo menos um orifício ou abertura radial (não mostrado), que se estende através do mesmo, substancialmente perpendicular ao eixo geométrico longitudinal do guia de ondas (150). Tal abertura pode ser posicionada em um nó. Um anel de vedação proximal (não mostrado) e um anel de vedação distal (130) (vide FIGURAS 2-6) são montados no conjunto de transmissão acústica, próximo dos nós ultrassônicos do guia de ondas (150), conforme é conhecido na técnica.
[0071] Conforme mostrado ainda nas FIGURAS 11 a 12, o guia de ondas (150) inclui ainda recursos de equilíbrio (160). Os recursos de equilíbrio (160) são formados como superfícies planas, dispotas lateralmente no guia de ondas (150), que é de outro modo cilíndrico. Os recursos de equilíbrio (160) servem para ampliar as faixas do modo transversal na direção contrária dos modos longitudinais preferidos, em ambas as direções a partir da frequência ressonante (por exemplo, 55,5 kHz). Em algumas versões, os recursos de equilíbrio (160) são espaçados 180° um do outro no guia de ondas (150) e se estendem por um comprimento de cerca de 6,604 cm (2,600 polegadas) a cerca de 7,112 cm (2,800 polegadas), e, mais especificamente, cerca de 6,858 cm (2,700 polegadas). A linha central dos recursos de equilíbrio (160) é de cerca de 17,78 a cerca de 18,29 cm (7,000 a cerca de 7,200 polegadas), e, mais especificamente, cerca de 18,16 cm (7,148 polegadas). Alternativamente, quaisquer outras dimensões adequadas podem ser usadas.
[0072] Em alguns casos, o instrumento (10) pode incluir um pedal, operado com o pé (não usado), que fornece uma chave para energizar seletivamente o transdutor (12) e a lâmina ultrassônica (100). Alternati-vamente, o operador pode usar botões (26) como chaves para energi- zar seletivamente o transdutor (12) e a lâmina ultrassônica (100). Em alguns de tais casos, entretanto, pode haver variabilidade signi-ficativa na resistência do cabo (14) e/ou na resistência dos contatos no circuito entre o gerador (16) e os botões (26). Tal resistência variável pode dificultar a detecção pelo gerador (16) dos estados de fechamento das chaves (por exemplo, quando os botões (26) estão pressionados). A variabilidade na resistência pode ser devido a resíduos deixados nos contatos do conjunto do pegador (20) por um processo de limpeza; e/ou devido a outros fatores. Algumas versões dos circuitos podem ser significativamente menos suscetíveis a tais riscos. Por exemplo, algumas versões dos circuitos podem eficazmente anular os efeitos da resistência variável em tempo real. Vários exemplos de tais circuitos são descritos com mais detalhes abaixo; enquanto outros exemplos ainda se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0073] Em algumas versões, o gerador (16) compreende um gera dor GEN11, fabricado e vendido pela Ethicon Endo-Surgery, Inc. O gerador (16) pode atuar como uma fonte de corrente constante (por exemplo, a aproximadamente +/-16 mA, alternando em uma frequência baixa, como cerca de 500 Hz) e determinar o estado das chaves (aberto/fechado) no conjunto do pegador (20), através da medição da queda de tensão através das linhas dos interruptores manuais, na face do gerador (16). Essa queda de tensão pode incluir uma queda de tensão desconhecida, causada pela resistência no cabo (14) e/ou pela resistência nos contatos no conjunto do pegador (20), que pode mudar ao longo do tempo devido a fatores como rotação do instrumento e mudanças na força de contato durante o uso do instrumento, etc. Os exemplos descritos abaixo possibilitam ao gerador (16) determinar e subtrair essa tensão desconhecida, através da medição de um componente de referência conhecido no conjunto do pegador (20), que produz uma queda de tensão conhecida, em estreita proximidade temporal com a medição dos estados das chaves.
[0074] A FIGURA 13 mostra um circuito meramente exemplificador (200) que pode ser incorporado ao instrumento (10) para detectar variações na resistência, conforme descrito acima. O circuito (200) inclui um resistor de referência (210) e um EEPROM (212) que, juntos, fornecem um recurso de referência colocado na perna positiva do circuito (200). Esse recurso de referência formado pelo resistor de referência (210) e pelo EEPROM (212) pode ser lido no semiciclo positivo de um sinal de interrogação do gerador (16). Deve-se entender que o EEPROM (212) puxa uma corrente tão baixa que o EEPROM (212) não afeta de modo apreciável a queda de tensão produzida pelo resistor de referência (210). O circuito (200) inclui também um conjunto de chave (220), seus respectivos resistores (222) e um par de diodos (224). As chaves (220) são acionadas por botões (26), por um gatilho (28) e/ou outros recursos móveis no conjunto do pegador (20). As chaves (220), os resistores (222) e os diodos (224) são colocados na perna negativa do circuito (200). As chaves (220), os resistores (222) e os diodos (224) são, portanto, lidos no semiciclo negativo de um sinal de interrogação do gerador (16). O gerador (16) é operável para determinar e subtrair uma queda de tensão das chaves (220), resistores (222) e diodos (224) com base em uma queda de tensão conhecida de um resistor de refe- rência (210), em estreita proximidade temporal com a medição dos estados das chaves (220).
[0075] A FIGURA 14 mostra um outro circuito meramente exemplifi- cador (300), que pode ser incorporado ao instrumento (10) para detectar variações na resistência, conforme descrito acima. O circuito (300) inclui um diodo zener de referência (310) e um EEPROM (312) que, juntos, forncem um recurso de referência colocado na perna positiva do circuito (300). Esse recurso de referência formado pelo diodo zener de referência (310) e o EEPROM (312) podem ser lidos no semiciclo positivo de um sinal de interrogação do gerador (16). Deve-se entender que o EEPROM (312) puxa uma corrente tão baixa que o EEPROM (312) não afeta de modo apreciável a queda de tensão produzida pelo diodo zener (310). O circuito (300) inclui também um conjunto de chave (320), seus respectivos diodos (322) e um par adicional de diodos (324). As chaves (320) são acionadas por botões (26), um gatilho (28) e/ou outros recursos móveis no conjunto do pegador (20). As chaves (320) e diodos (322, 324) são colocados na perna negativa do circuito (300). As chaves (320) e diodos (322, 324) são, portanto, lidas no semiciclo negativo de um sinal de interrogação do gerador (16). O gerador (16) é operável para determinar e subtrair uma queda de tensão das chaves (320) e diodos (322, 324), com base em uma tensão conhecida do diodo zener de referência (310), em estreita proximidade temporal com a medição dos estados das chaves (320).
[0076] A FIGURA 15 mostra um outro circuito meramente exempli- ficador (400) que pode ser incorporado ao instrumento (10) para detectar variações na resistência, conforme descrito acima. O circuito (400) é substancialmente semelhante ao circuito (300) descrito acima, em que o circuito (400) inclui um diodo zener de referência (410), um EEPROM (412), chaves (420) e diodos (422, 424) que são todos arranjados de menira semelhante ao arranjo de diodo zener (310), EEPROM (312), chaves (320) e diodos (322, 324) do circuito (300). Ao contrário do circuito (300), o circuito (400) deste exemplo inclui ainda um circuito de atraso do ligamento (430). O circuito de atraso do ligamento (430) é configurado para aproximadamente % do tempo do ciclo do sinal de interrogação do gerador (16), de modo que o gerador (16) vê somente o recurso de referência (isto é, diodo zener (410) e EEPROM (412)) durante a primeira metade do semiciclo negativo; e então vê as chaves (420) e diodos (422, 424) em paralelo com o recurso de referência durante a segunda metade do semiciclo negativo. Em algumas versões, o circuito de atraso do ligamento (430) pode incluir um sequenciador Maxim MAX6895, que aciona um FET de canal p Philips PMV65XP. Outras configurações adequadas para o circuito de atraso do ligamento (430) se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0077] A FIGURA 16 mostra um outro circuito meramente exempli- ficador (500) que pode ser incorporado ao instrumento (10) para detectar variações na resistência, conforme descrito acima. O circuito (500) é substancialmente semelhante ao circuito (200) descrito acima, em que o circuito (200) inclui um resistor de referência (510), um EEPROM (512), chaves (520), resistores (522) e diodos (524) que são todos arranjados de uma maneira semelhante ao arranjo do resistor de referência (210), um EEPROM (212), chaves (220), resistores (222) e diodos (224) do circuito (200). Ao contrário do circuito (200), o circuito (500) deste exemplo inclui ainda um circuito de atraso do ligamento (530). O circuito de atraso do ligamento (530) é configurado para aproximadamente % do tempo do ciclo do sinal de interrogação do gerador (16), de modo que o gerador (16) vê somente o recurso de referência (isto é, resistor de referência (510) e EEPROM (512)) durante a primeira metade do semiciclo negativo; e então vê as chaves (520), resistores (522) e diodos (524) em paralelo com o recurso de referência, durante a segun- da metade do semiciclo negativo. Em algumas versões, o circuito de atraso do ligamento (530) pode incluir um sequenciador Maxim MAX6895 que aciona um FET de canal p Philips PMV65XP. Outras configurações adequadas para o circuito de atraso do ligamento (530) se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0078] A FIGURA 17 mostra um outro circuito meramente exempli- ficador (600) que pode ser incorporado ao instrumento (10) para detectar variações na resistência, conforme descrito acima. O circuito (600) é substancialmente semelhante ao circuito (500) descrito acima, em que o circuito (600) inclui um resistor de referência (610), um EEPROM (612), chaves (620), resistores (622) e diodos (624) que são todos arranjados de maneira semelhante ao arranjo de resistor de referência (510), um EEPROM (512), chaves (520), resistores (522) e diodos (524) do circuito (500). O circuito (600) inclui também um circuito de atraso do ligamento (630), que pode ser configurado e operável como o circuito de atraso do ligamento (530) descrito acima. Entretanto, neste exemplo, o circuito de atraso do ligamento (630) é inserido na extremidade oposta da escada da chave (620). Tal posicionamento do circuito de atraso do ligamento (630) pode permitir o uso de um estágio de saída que usa FET de canal n, ou um circuito integrado de dreno essencialmente aberto (por exemplo, um temporizador 555 Zetex ZSCT1555 de baixa tensão).
[0079] A FIGURA 18 mostra formatos de onda exemplificadores de entrada e saída dos circuitos de atraso do ligamento (430, 530, 630). Especificamente, o sinal A representa um sinal de saída do circuito de atraso do ligamento (430, 530, 630); enquanto o sinal B representa um sinal de saída do circuito de atraso do ligamento (430, 530, 630).
[0080] A FIGURA 19 mostra um outro circuito meramente exempli- ficador (700) que pode ser incorporado ao instrumento (10) para detec tar variações na resistência, conforme descrito acima. O circuito (700) é substancialmente semelhante ao circuito (400) descrito acima, em que o circuito (300) inclui um diodo zender de referência (710), um EEPROM (712), chaves (720) e diodos (722, 724) que são todos arranjados de maneira semelhante ao arranjo de diodo zener (410), EEPROM (412), chaves (420) e diodos (422, 424) do circuito (400). Ao contrário do circuito (400), o circuito (700) deste exemplo inclui ainda um circuito de alternância (730), ao invés do circuito de atraso do ligamento (430). O circuito de alternância (730) deste exemplo é do tipo biestável, que é acionado por um segundo pulso durante o semiciclo negativo e reiniciado pelo pulso positivo no semiciclo positivo. Embora não mostrado, deve- se entender que o circuito de alternância (730) pode alternativamente ser posicionado na extremidade oposta da escada da chave (720) (por exemplo, semelhante à colocação do circuito de atraso do ligamento (630) no circuito (600). A FIGURA 20 mostra formatos de onda de entrada e saída exemplificadores do circuito de alternância (730). Especificamente, o sinal C representa um sinal de entrada do circuito de alternância (730); enquanto o sinal D representa um sinal de saída do circuito de alternância (730).
[0081] Deve-se entender que os circuitos (200, 300, 400, 500, 600, 700) descritos acima são exemplos meramente ilustrativos. Vários outros componentes, recursos e técnicas adequados podem ser usados para comutar alternadamente somente em um recurso de referência individual e, então, em uma escada de chave em paralelo com o recurso de referência ou sozinha. Deve-se entender também que o número de chaves (220, 320, 420, 520, 620, 720) pode variar; de modo que mais que três chaves (220, 320, 420, 520, 620, 720) ou menos que três chaves (220, 320, 420, 520, 620, 720) podem ser usadas.
[0082] Pelo menos uma ou mais porções de algumas versões do instrumento (10) podem ser esterilizadas e reutilizadas. Por exemplo, pode ser desejável recuperar e reutilizar componentes elétricos dentro do conjunto do pegador (20), como circuitos, etc. Entretanto, pode não ser desejável reutilizar outras porções do conjunto do pegador (20), como a carcaça externa do conjunto do pegador (20), botões (26), etc. Portanto, pode ser desejável configurar o conjunto do pegador (20) de modo que alguns componentes dentro do conjunto do pegador (20) possam ser recuperados e reutilizados; mas de modo ainda que outras porções do conjunto do pegador (20) não possam ser recuperadas e reutilizadas. Em algumas configurações, pelo menos uma porção do instrumento (10) pode ser reutilizada após o instrumento (10) ter sido usado em um procedimento cirúrgico. Em algumas outras configurações, pelo menos uma porção do instrumento (10) pode ser reutilizada antes mesmo de o instrumento (10) deixar o local de fabricação. Por exemplo, se um instrumento (10) não passar em um teste de controle de qualidade, um ou mais componentes do instrumento (10) (por exemplo, aqueles que não interferiram na falha no teste de controle de qualidade) podem ser recuperados e reutilizados para construir outro instrumento (10). Vários exemplos de configurações que podem ser incorporadas no conjunto do pegador (20) para permitir a reutilização seletiva serão descritos com mais detalhes abaixo; enquanto outros exemplos ainda se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0083] Em algumas versões do instrumento (10), ao menos parte dos circuitos pode incluir um circuito flexível formado como um laminado. Uma ou mais regiões da camada externa desse laminado podem estar aderidas à carcaça do conjunto do pegador (20), de modo que uma ou mais camadas são puxadas na direção contrária do circuito flexível, quando a carcaça é desmontada, durante o processo de recuperação, danificando assim o circuito flexível. Tal ação de puxar as camadas na direção contrária pode tornar o circuito flexível inoperante. Em alguns desses casos, toda uma camada externa de um circuito está aderida à carcaça do conjunto do pegador (20). Em alguns outros exemplos, somente porções do circuito, próximas a componentes do circuito-chave, estão aderidas à carcaça do conjunto do pegador (20). Como uma outra variação, um ou mais componentes do circuito podem estar aderidos à carcaça do conjunto do pegador (20), sem necessariamente haver adesão do laminado flexível de um circuito flexível à carcaça do conjunto do pegador (20). Em algumas de tais versões, o laminado flexível do circuito flexível pode ser perfurado ou enfraquecido de outro modo, criando uma região de quebra controlada, de modo que o circuito flexível se desprende do componente do circuito aderido, enquanto o componente do circuito aderido permanece na carcaça do conjunto do pegador, quando porções do conjunto do pegador são separadas durante uma tentativa de recuperação. Como ainda mais um exemplo meramente ilustrativo, uma ou mais regiões de um circuito no conjunto do pegador (20) podem ser sensíveis a água, álcool ou outro fluido, de modo que o circuito é destruído quando tais regiões entram em contato com água, álcool ou outro fluido que pode ser usado durante uma tentativa de recuperação. Por exemplo, um laminado de circuito pode ser configurado para se deslaminar ao entrar em contato com água, álcool ou outro fluido.
[0084] As FIGURAS 21 a 25 mostram um conjunto da carcaça do pegador (1000) exemplificador que pode ser incorporado ao instrumento (10). O conjunto (1000) deste exemplo inclui um primeiro membro da carcaça (1010), um segundo membro da carcaça (1030) e um membro de retenção (1050). Conforme se pode observar melhor na FIGURA 21, o membro da carcaça (1010) inclui uma pluralidade de colunas (1012) e uma cavidade (1014). Também conforme se pode observar melhor na FIGURA 21, o membro da carcaça (1030) inclui uma pluralidade de ca- vidades (1032) e uma coluna (1034). As colunas (1012, 1034) são con-figuradas para inserção nas cavidades correspondentes (1014, 1032) com a finalidade de prender os membros da carcaça (1010, 1030) uns aos outros. Somente a título de exemplo, as colunas (1012, 1034) podem se encaixar por pressão nas cavidades correspondentes (1014, 1032), podem ser presas às cavidades (1014, 1032) através de soldagem ultrassônica, podem ser submetidas a montagem a quente (1014, 1032), pode ser aderidas às cavidades (1014, 1032) usando adesivos e/ou podem ser presas de outra forma às cavidades (1014, 1032). Conforme se pode observar melhor nas FIGURAS 22-23, os membros da carcaça (1010, 1030) também incluem recursos macho e fêmea complementares (1018, 1038). Em algumas outras versões, os recursos macho e fêmea (1018, 1038) são substituídos por recursos de preensão por sobreposição ("shiplap") ou algum outro tipo de estrutura. O recursos macho e fêmea (1018, 1038) podem ser presos um ao outro por encaixe de interferência, soldagem ultrassônica, montagem a quente, adesivos, etc.
[0085] Também conforme melhor observado nas FIGURAS 22 a 23, cada membro da carcaça (1010, 1030) inclui uma faixa enfraquecida (1016, 1036) sob a forma de um corte em forma de V. As faixas enfraquecidas (1016, 1036) reduzem a espessura da parede, o que promove quebra ao longo das faixas enfraquecidas (1016, 1036) quando os membros da carcaça (1010, 1030) são separados. Em outras palavras, quando alguém tenta separar membros conectados da carcaça (1010, 1030) puxando os membros conectados da carcaça (1010, 1030) em direções opostas, um ou ambos os membros da carcaça (1010, 1030) podem quebrar sua respectiva faixa enfraquecida (1016, 1036). Portanto, um fragmento de um membro da carcaça (1010, 1030) pode permanecer unido ao outro membro da carcaça (1010, 1030), enquanto o restante do membro da carcaça (1010, 1030) fragmentado pode ser sepa- rado do outro membro da carcaça (1010, 1030). Essa que- bra/fragmentação pode impedir a reutilização de ambos os membros da carcaça (1010, 1030). O fragmento menor do membro da carcaça (1010, 1030) quebrado pode continuar unido ao outro membro da carcaça (1010, 1030) devido à conexão entre os recursos macho e fêmea (1018, 1038), entre a cavidade (1014) e a coluna (1034) e/ou de outro modo. Outros meios adequados através dos quais se pode fornecer quebra controlada nos membros da carcaça (1010, 1030) se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0086] Conforme se pode observar melhor na FIGURA 25, o mem bro de retenção (1050) do presente exemplo, em geral, tem um formato de "Y", com um primeiro braço (1052), um segundo braço (1054) e um terceiro braço (1056). O primeiro braço (1052) inclui uma seção dobrada (1058) e uma reentrância (1070) que termina em uma borda (1072). Os segundo e terceiro braços (1054, 1056) têm suas respectivas colunas (1060). Conforme se pode observar melhor nas FIGURAS 21 e 24, o membro de retenção (1050) é configurado para se encaixar nos recursos do membro de retenção (1020, 1040) dos membros da carcaça (1010, 1030). Conforme mostrado na FIGURA 23, o recurso do membro de retenção (1020) do membro da carcaça (1010) compreende um par de cavidades (1022) que têm um perfil hexagonal. As cavidades (1022) são configuradas para receber as colunas (1060) através de um encaixe de interferência. Naturalmente, as cavidades (1022) podem ter ter qualquer outra configuração adequada; e soldagem ultrassônica, montagem a quente, adesivos, etc., podem também ser usados para prender as colunas (1060) às cavidades (1022). Conforme mostrado nas FIGURAS 22 e 24, o recurso do membro de retenção (1040) do membro da carcaça (1030) compreende um par de membros com fecho de mola (1042). O membro de retenção (1050) pode deslizar na posição atrás dos membros com fecho de mola (1042), de modo que os membros com fecho de mola (1042) podem ajudar a manter o posicionamento do membro de retenção (1050) em relação ao membro da carcaça (1030). Conforme mostrado, a seção dobrada (1058) do membro de retenção (1050) passa entre os e na frente dos membros com fecho de mola (1042), quando os braços (1054, 1056) são posicionados nos membros com fecho de mola (1042).
[0087] No presente exemplo, um ou mais conjuntos de chaves (não mostrados) são posicionados atrás dos botões (26) e incluem circuitos de alternadores que respondem a ativação pelos botões (26). A reentrância (1070) é dimensionada para receber uma porção de tal conjunto de chave. Especificamente, um conjunto de chave pode deslizar entre a seção dobrada (1058) do primeiro braço (1052) e os membros com fecho de mola (1042), com o conjunto de chave sendo recebido na reentrância (1070). Os membros com fecho de mola (1042) ajudam a segurar o conjunto de chave em posição em relação ao membro da carcaça (1030). Um par de nervuras (1043) definido no membro da carcaça (1010) também apoia o conjunto de chave contra o membro da carcaça (1030). Portanto, uma borda externa do conjunto de chave é retida nos membros com trava de mola (1042), enquanto a borda externa oposta do conjunto de chave, que fica sentada na reentrância (1070), é retida pelo membro de retenção (1050). Como o membro de retenção (1050) é preso ao membro da carcaça (1010), deve-se entender que o membro de retenção (1050) e os membros com trava de mola (1042) exercerão forças opostas sobre as bordas externas do conjunto de chave conforme os membros da carcaça (1010, 1030) são separados. Essas superfícies opostas no conjunto de chave podem cortar/quebrar o conjunto de chave (por exemplo, por cisalhamento) ou torná-lo de outro modo inoperante. Portanto, se alguém tenta desmontar o conjunto do pegador (1000), separando os membros da carcaça (1010, 1030), tal ação destrói o conjunto de chave localizado atrás dos botões (26). O conjunto de chave pode compreender quaisquer componentes adequados, como placas de circuito rígidas, circuitos flexíveis, fios, chaves convencionais, etc. Em alguns casos, a borda (1072) é afiada para facilitar a separação do conjunto de chave.
[0088] Embora membros com trava de mola (1042) retenham o conjunto de chave em relação ao membro da carcaça (1030) no presente exemplo, deve-se entender que um conjunto de chave pode ser retido de outro modo em relação ao membro da carcaça (1030). Por exemplo, ao menos parte do conjunto de chave pode ser soldada ao membro da carcaça (1030) (por exemplo, usando soldagem soldagem por fricção, soldagem ultrassônica, montagem a quente, adesivos, etc.). Como outro exemplo meramente ilustrativo, um recurso de retenção secundário pode ser colocado sobre a reentrância (1070) do membro de retenção (1050). Como ainda outro exemplo meramente ilustrativo, o conjunto de chave pode ser aderido ao membro da carcaça (1030). Outros meios adequados através dos quais um conjunto de chave pode ser preso se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção.
[0089] A FIGURA 26 mostra um outro conjunto da carcaça do pe gador (1100) exemplificador, que pode ser incorporado ao instrumento (10). O conjunto (1100) deste exemplo inclui um primeiro membro da carcaça (1110) e um segundo membro da carcaça (1130). O membro da carcaça (1110) inclui uma pluralidade de colunas (1112) e uma cavidade (1114). O membro da carcaça (1130) inclui uma pluralidade de cavidades (1132) e uma coluna (1134). As colunas (1112, 1134) são configuradas para inserção nas cavidades correspondentes (1114, 1132) para prender os membros da carcaça (1110, 1130) uns aos outros. Somente a título de exemplo, as colunas (1112, 1134) podem se encaixar por pressão às cavidades correspondentes (1114, 1132), podem ser presas às cavidades (1114, 1132) por soldagem ultrassônica, podem ser montadas a quente nas cavidades (1114, 1132), podem ser aderidas às cavidades (1114, 1132) usando adesivos e/ou podem ser presas de outro modo às cavidades (1114, 1132).
[0090] O membro da carcaça (1110) inclui um recurso de retenção embutido (1150) que compreende um par de pinos (1152). Pinos (1152) definem uma lacuna configurada para receber uma porção de um conjunto de chave, que pode incluir circuitos alternadores que respondem a ativação por botões (26). Um adesivo pode ser usado para aderir o conjunto de chave aos pinos (1152). Em casos em que o conjunto da carcaça (1100) é desmontado, o conjunto de chave pode ser retido no recurso de retenção (1150). Deve-se entender que, devido à adesão do conjunto de chave ao recurso de retenção (1150), uma pessoa que esteja montando vários conjuntos de carcaça (1100) pode ser capaz de identificar rapidamente que um conjunto da carcaça (1100) já foi montado e talvez desmontado posteriormente. Isso pode levar tal pessoa a descartar o conjunto da carcaça (1100) como sucata. Além disso, um adesivo pode ser usado para aderir o conjunto de chave a uma região adjacente do membro da carcaça (1130). Portanto, quando o conjunto da carcaça (1100) é desmontado através da separação dos membros da carcaça (1110, 1130), o conjunto de chave pode ser quebrado e, portanto, se tornar inoperante. Novamente, se dois fragmen-tos quebrados do conjunto de chave permanecerem aderidos a cada membro da carcaça (1110, 1130), uma pessoa que esteja montando vários conjuntos de carcaça (1100) pode ser capaz de identificar rapidamente que um conjunto da carcaça (1100) já foi montado e talvez desmontado posteriormente.
[0091] Em alguns casos, pode ser desejável desmontar cuidado samente um conjunto do pegador (20), minimizando, ao mesmo tempo, a destruição do conjunto do pegador (20). Por exemplo, isso pode ser feito para recuperar pelo menos uma porção do conjunto do pegador (20) e/ou algo dentro do conjunto do pegador (20). Com algumas versões do conjunto do pegador (20), isso pode ser feito cuidadosamente, fazendo um ou mais orifícios no conjunto do pegador (20). Por exemplo, a FIGURA 27 mostra um exemplo onde um orifício (1200) pode ser feito em um membro da carcaça (1010, 1110), em um local que corresponde à coluna (1034, 1134) e à cavidade (1014, 1114), e, assim, desacoplar eficazmente a coluna (1034, 1134) e a cavidade (1014, 1114). A FIGURA 28 mostra um exemplo onde são feitos orifícios (1210, 1220) em um membro da carcaça (1030), em locais que correspondem a colunas (1060) e cavidades (1022), desacomplando, assim, as colunas (1060) e cavidades (1022). Naturalmente, os membros da carcaça (1010, 1030, 1110, 1130) podem ser furados em diversos outros locais, inclusive aqueles associados às colunas (1012, 1112) e às cavidades (1032, 1132). Os orifícios feitos podem facilitar a separação do membro da carcaça (1010, 1110) do membro da carcaça (1030, 1130) com força mínima, podem manter substancialmente a integridade estrutural dos membros da carcaça (1010, 1110, 1030, 1130) e/ou minimizar o dano aos componentes dentro dos membros da carcaça (1010, 1110, 1030, 1130). Em casos onde um membro da carcaça (1010, 1110, 1030, 1130) furado pode ser reutilizado, o orifício feito pode ser enchido, coberto ou resolvido de outro modo.
[0092] As FIGURAS 29 a 30 mostram um conjunto de lâmina ul- trassônica (1300) exemplificador, que compreende uma lâmina ultras- sônica (1310) disposta em um tubo (1320). A lâmina ultrassônica (1310) é posicionada de modo que uma extremidade distal (1312) da lâmina (1310) fica exposta em relação ao tubo (1320). O tubo (1320) tem um diâmetro interno que é substancialmente maior que o diâmetro externo da lâmina (1310), de modo que uma lacuna cilíndrica é defini- da entre o diâmetro interno do tubo (1320) e o diâmetro externo da lâmina (1310). Uma injeção anular (1330) é posicionada em torno do exterior da lâmina (1310) para apoiar a lâmina (1310) em relação ao tubo (1320). Somente a título de exemplo, a injeção (1330) pode ser formada de um material plástico ou de um material elastomérico. A injeção (1330) pode estar localizada em uma posição longitudinal que corresponde a um nó associado a vibrações ultrassônicas ressonantes comunicadas através da lâmina (1310). O posicionamento e/ou propriedades da injeção (1330) fornecem isolamento acústico significativo do tubo (1320) em relação à lâmina (1310). Embora uma injeção (1330) seja mostrada, deve-se entender que várias injeções podem ser usadas. Deve-se entender também que podem ser usados outros recursos além da injeção (1330). Somente a título de exemplo, um ou mais anéis de vedação localizados nos nós podem ser usados ao invés da injeção (1330).
[0093] O tubo (1320) inclui uma aba direcionada distalmente (1322), formada por um corte em formato de "U" no tubo (1320). Conforme se pode observar melhor na FIGURA 30, a aba (1322) é orientada para dentro e distalmente dentro do tubo (1320). No presente exemplo, a aba (1322) não entra em contato com a lâmina ultrassônica (1310). Em algumas outras versões, a aba (1322) entra em contato com a lâmina ultrassônica (1310) em um nó associado a vibrações ul- trassônicas ressonantes, comunicadas através da lâmina (1320). A aba (1322) é resiliente, de modo que a aba (1322) se desvia do trajeto quando a lâmina (1310) e a injeção (1330) são inseridas distalmente através do tubo (1320) durante a montagem do conjunto da lâmina ul- trassônica (1300); no entanto, a aba (1322) retorna à posição mostrada na FIGURA 30 após a injeção (1330) liberar a aba (1322). Entretanto, se a lâmina (1310) e a injeção (1330) forem retraídas de maneira proximal através do tubo (1320) durante a desmontagem do conjunto da lâmina ultrassônica (1300), a aba (1322) rasgará a injeção (1330) ou destruirá de outro modo a injeção (1330). Na medida que alguém tentasse depois reutilizar a lâmina (1310) e a injeção (1330), a injeção (1330) destruída faria com que o conjunto da lâmina ultrassônica (1300) reconstruído fosse reprovado em um teste de vazamento.
[0094] Em algumas versões do instrumento (10), o conjunto trans dutor (12) pode ser apoiado dentro do conjunto do pegador (20) por uma carcaça do conector que permite ao conjunto transdutor (12) girar em relação ao conjunto do pegador (20), ao redor do eixo geométrico longitudinal definido pelo conjunto transdutor (12). As FIGURAS 31 a 33 mostram um exemplo de tal carcaça do conector (1400), juntamente com recursos exemplificadores que podem ser usados para acoplar a carcaça do conector (1400) ao conjunto do pegador (20). Especificamente, a carcaça do conector (1400) deste exemplo inclui um cubo de retenção (1410) que define uma abertura (1412). Uma metade da carcaça do pegador inclui um grampo de retenção (1420); enquanto outra metade da carcaça do pegador inclui um par de flanges de retenção (1430). Conforme mostrado na FIGURA 33, o grampo de retenção (1420) inclui um par de braços farpados (1422). Os braços farpados (1422) são configurados para caber em uma abertura (1412) do cubo de retenção (1410) e, assim, fornecer um encaixe por mola entre a carcaça do conector (1400) e a metade associada da carcaça do pegador, conforme mostrado na transição da FIGURA 31 para a FIGURA 32. As flanges (1430) são configuradas para conter parcialmente a carcaça do conector (1400) e, assim, restringir até certo ponto o movimento da car-caça do conector (1400); permitindo ainda que a carcaça do conector (1400) flutue até certo ponto dentro do conjunto do pegador.
[0095] A FIGURA 34 mostra um exemplo onde uma primeira me tade da dobradiça (1510) e uma segunda metade da dobradiça (1520) são unidas para conter uma carcaça do conector (1500) que é seme- lhante à carcaça do conector (1400) descrita acima. As metades unidas (1510, 1520) podem se acoplar ao conjunto do pegador (20) através de pinos de atrito, adesivos, soldagem ultrassônica, outro tipo qualquer de soldagem, ou de qualquer outro meio adequado. As metades unidas (1510, 1520) podem ou não se mover em relação ao conjunto do pegador (20). Entretanto, as metades unidas (1510, 1520) podem possibilitar que a carcaça do conector (1500) flutue em relação às metades unidas (1510, 1520), conforme necessário. Como outra variação meramente ilustrativa, um membro de silicone pode ser interposto entre a carcaça do conector (1500) e o conjunto do pegador (20), ao invés das metades unidas (1510, 1520). Tal membro de silicone pode reter substancialmente a carcaça do conector (1500) dentro do conjunto do pegador (20) e ainda permitir algum grau de movimento (isto é, flutuação) da carcaça do conector (1500) em relação ao conjunto do pegador (20). Outros meios adequados através dos quais uma carcaça do conector pode ser acoplada a um conjunto do pegador se tornarão aparentes para os versados na técnica, com base nos ensinamentos da presente invenção. Esses recursos de acoplamento da carcaça do conector podem ser usados em conjunto com quaisquer outros recursos descritos acima para fornecer um meio de reconhecer um conjunto de chave ou revestimento.
[0096] Deve-se entender que quaisquer das versões dos instrumen tos aqui descritas pode incluir diversos outros recursos além de, ou substituindo os recursos descritos acima. Somente a título de exemplo, quaisquer dos intrumentos aqui descritos podem também incluir um ou mais dos diversos recursos apresentados em qualquer das diversas referências incoporadas para fins de referência na presente invenção. Deve-se entender também que os ensinamentos da presente invenção podem ser prontamente aplicados a qualquer dos instrumentos descri- tos em qualquer das outras referências citadas na presente invenção, de modo que os ensinamentos da presente invenção podem ser prontamente combinados com os ensinamentos de qualquer das referências citadas na presente invenção de diversas formas. Outros tipos de instrumentos nos quais os ensinamentos da presente invenção podem ser incorporados serão evidentes para os versados na técnica.
[0097] Entende-se que qualquer patente, publicação, ou outro ma terial de descrição, no todo ou em parte, que diz-se ser incorporado à presente invenção a título de referência, é incorporado à presente invenção somente se o material incorporado não entrar em conflito com definições, declarações, ou outro material de descrição existentes apresentados nesta descrição. Desse modo, e até onde for necessário, a descrição como explicitamente aqui determinada substitui qualquer material conflitante incorporado aqui a título de referência. Qualquer material, ou porção do mesmo, que são tidos como incorporados a título de referência na presente invenção, mas que entra em conflito com definições, declarações, ou outros materiais de descrição existentes aqui determinados serão aqui incorporados apenas até o ponto em que nenhum conflito surgirá entre o material incorporado e o material de descrição existente.
[0098] Versões dos dispositivos descritos acima podem ter aplica ção em tratamentos médicos convencionais e procedimentos conduzidos por um profissional médico, assim como aplicação em tratamentos e procedimentos médicos assistidos por robótica. Somente a título de exemplo, vários ensinamentos da presente invenção podem ser pron-tamente incorporados a sistemas cirúrgicos robóticos como o sistema DAVINCI™ da Intuitive Surgical, Inc., de Sunnyvale, CA, EUA. De modo similar, os elementos versados na técnica reconhecerão que vários dos ensinamentos da presente invenção podem ser prontamente combinados com vários dos ensinamentos da patente US n° 6.783.524, in- titulada "Robotic Surgical Tool with Ultrasound Cauterizing and Cutting Instrument", publicada em 31 de agosto de 2004, cuja revelação foi in-corporada à presente invenção para fins de referência.
[0099] As versões descritas acima podem ser projetadas para se rem descartadas após um único uso, ou podem ser projetadas para serem usadas múltiplas vezes. As versões podem, em qualquer um ou em ambos os casos, ser recondicionadas para reutilização após pelo menos um uso. O recondicionamento pode incluir qualquer combinação das etapas de desmontagem do dispositivo, seguido de limpeza ou substituição de peças particulares, e remontagem subsequente. Especificamente, algumas versões do dispositivo podem ser desmontadas, em qualquer número de peças particulares ou partes do dispositivo pode ser seletivamente substituídas ou removidas em qualquer combinação. Com a limpeza e/ou substituição de partes particulares, algumas versões do dispositivo podem ser remontadas para uso subsequente em uma instalação de recondicionamento, ou por um usuário imediatamente antes de um procedimento cirúrgico. Aqueles versados na técnica entenderão que o recondicionamento de um dispositivo pode utilizar uma variedade de técnicas para desmontagem, limpeza/substituição, e re- montagem. O uso de tais técnicas, e o dispositivo recondicionado resultante estão todos dentro do escopo do presente pedido.
[00100] Apenas a título de exemplo, as versões aqui descritas podem ser esterilizadas antes e/ou depois de um procedimento. Em uma técnica de esterilização, o dispositivo é colocado em um recipiente fechado e vedado, como um saco plástico ou de TYVEK. O recipiente e o dispositivo podem então ser colocados em um campo de radiação, como radiação gama, raios X ou elétrons de alta energia, que pode penetrar no recipiente. A radiação pode exterminar bactérias no dispositivo e no recipiente. O dispositivo esterilizado pode então ser guardado em um recipiente estéril para uso posterior. O dispositivo pode também ser esterilizado com o uso de qualquer outra técnica conhecida, incluindo, mas não se limitando a, radiação beta ou gama, óxido de etileno ou vapor d'água.
[00101] Tendo mostrado e descrito várias modalidades da presente invenção, outras adaptações dos métodos e sistemas descritos na presente invenção podem ser realizados por meio de modificações adequadas por um elemento versado na técnica sem se afastar do âmbito da presente invenção. Várias dessas possíveis modificações foram mencionadas, e outras estarão evidentes para os versados na técnica. Por exemplo, os exemplos, modalidades, geometria, materiais, dimensões, proporções, etapas e similares discutidos acima são ilustrativos e não são necessários. Consequentemente, o escopo da presente invenção deve ser considerado de acordo com os termos das concretizações a seguir e entende-se que ele não está limitado aos detalhes da estrutura e operação mostrados e descritos no relatório descritivo e nos desenhos.
Claims (14)
1. Aparelho (10) para operação em tecido, o aparelho com-preendendo: (a) um corpo (22); (b) um transdutor ultrassônico (12) operável para converter potência elétrica em vibrações ultrassônicas; (c) uma haste (30) se estendendo distalmente do corpo (22), em que a haste (30) define um eixo geométrico longitudinal; e (d) um atuador de extremidade (40) na extremidade distal da haste (30), em que o atuador de extremidade (40) compreende uma lâmina ultrassônica (100) em comunicação acústica com o transdutor ultrassônico (12), em que a lâmina ultrassônica (100) inclui uma região de reentrância tendo uma pluralidade de reentrâncias (110, 112), caracterizado pelo fato de que a região de reentrância é afunilada tal que a área de seção transversal da região de reentrância diminui ao longo do comprimento da região de reentrância, em que a lâmina ultrassônica (100) ainda compreende um recurso de equilíbrio (114) formado por um corte côncavo se estendendo circunferencialmente ao redor da lâmina ultrassônica (100), em que o recurso de equilíbrio (114) é proximal à região de reentrância.
2. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que a lâmina ultrassônica (100) é curva tal que um eixo geométrico longitudinal central da lâmina ultrassônica (100) se estende ao longo de uma trajetória curva.
3. Aparelho, de acordo com a reivindicação 2, caracterizado pelo fato de que a lâmina ultrassônica (100) tem uma ponta distal, em que a ponta distal é deslocada lateralmente em relação ao eixo geométrico longitudinal definido pela haste (30).
4. Aparelho, de acordo com a reivindicação 1, caracteriza- do pelo fato de que as reentrâncias (110, 112) incluem seções arqueadas e seções se estendendo longitudinalmente.
5. Aparelho, de acordo com a reivindicação 4, caracterizado pelo fato de que as seções arqueadas são côncavas.
6. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que as reentrâncias (110, 112) incluem uma primeira reentrância tendo uma primeira seção arqueada definida por um primeiro raio arrastado ao longo de um primeiro plano ortogonal passando pelo eixo geométrico longitudinal da haste (30), em que o eixo geométrico longitudinal da haste (30) se estende ao longo do primeiro plano ortogonal.
7. Aparelho, de acordo com a reivindicação 6, caracterizado pelo fato de que as reentrâncias (110, 112) ainda incluem uma segunda reentrância tendo uma segunda seção arqueada definida por um segundo raio arrastado ao longo do primeiro plano ortogonal.
8. Aparelho, de acordo com a reivindicação 7, caracterizado pelo fato de que as primeira e segunda seções arqueadas estão em lados opostos de uma lâmina ultrassônica (100).
9. Aparelho, de acordo com a reivindicação 8, caracterizado pelo fato de que a lâmina ultrassônica (100) é curva tal que um eixo geométrico longitudinal central da lâmina ultrassônica (100) se estende ao longo de uma trajetória curva, em que a primeira seção arqueada é posicionada em uma região interna da curva da lâmina ul- trassônica (100), em que a segunda seção arqueada é posicionada em uma região externa da curva da lâmina ultrassônica (100).
10. Aparelho, de acordo com a reivindicação 6, caracterizado pelo fato de que as reentrâncias (110, 112) ainda incluem uma terceira seção arqueada definida em parte por um terceiro raio arrastado ao longo de um segundo plano ortogonal, em que o segundo plano ortogonal é paralelo ao primeiro plano ortogonal, em que o segundo plano ortogonal é deslocado a partir do primeiro plano ortogonal tal que o eixo geométrico longitudinal da haste (30) não se estende ao longo do primeiro plano ortogonal.
11. Aparelho, de acordo com a reivindicação 10, caracterizado pelo fato de que a terceira seção arqueada é ainda definida em parte por um quarto raio arrastado ao longo de um terceiro plano ortogonal, em que o terceiro plano ortogonal é perpendicular aos primeiro e segundo planos ortogonais.
12. Aparelho, de acordo com a reivindicação 10, caracterizado pelo fato de que a primeira e terceira seções arqueadas compartilham uma borda em comum, ou em que a primeira seção arqueada termina de maneira proximal em uma primeira posição ao longo do comprimento da lâmina ultrassônica (100), em que a terceira seção arqueada termina de maneira proximal em uma segunda posição ao longo do comprimento da lâmina ultrassônica (100), em que a segunda posição é proximal em relação à primeira posição, ou em que parte da terceira seção arqueada termina em uma borda que corta para trás.
13. Aparelho, de acordo com a reivindicação 1, caracterizado pelo fato de que o atuador de extremidade (40) ainda compreende um braço de garra, em que o braço de garra é seletivamente articulável em direção à, e na direção contrária da, lâmina ultrassônica (100).
14. Aparelho, de acordo com a reivindicação 13, caracterizado pelo fato de que a lâmina ultrassônica (100) inclui uma borda que corta para trás, em que a borda que corta para trás faceia em direção ao braço de garra.
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261640227P | 2012-04-30 | 2012-04-30 | |
| US61/640,227 | 2012-04-30 | ||
| US201261722986P | 2012-11-06 | 2012-11-06 | |
| US61/722,986 | 2012-11-06 | ||
| US13/868,336 | 2013-04-23 | ||
| US13/868,336 US10238416B2 (en) | 2012-04-30 | 2013-04-23 | Ultrasonic device for cutting and coagulating |
| PCT/US2013/038396 WO2013165842A1 (en) | 2012-04-30 | 2013-04-26 | Ultrasonic device for cutting and coagulating |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112014027043A2 BR112014027043A2 (pt) | 2017-06-27 |
| BR112014027043B1 true BR112014027043B1 (pt) | 2022-02-08 |
Family
ID=49477937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014027043-0A BR112014027043B1 (pt) | 2012-04-30 | 2013-04-26 | Aparelho para operação em tecido |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US10238416B2 (pt) |
| EP (2) | EP3919008B1 (pt) |
| JP (1) | JP6702721B2 (pt) |
| KR (1) | KR102198444B1 (pt) |
| CN (1) | CN104271051B (pt) |
| AU (2) | AU2013256686A1 (pt) |
| BR (1) | BR112014027043B1 (pt) |
| CA (1) | CA2871945C (pt) |
| IN (1) | IN2014DN08803A (pt) |
| MX (1) | MX366565B (pt) |
| RU (1) | RU2669023C2 (pt) |
| WO (1) | WO2013165842A1 (pt) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10238416B2 (en) * | 2012-04-30 | 2019-03-26 | Ethicon Llc | Ultrasonic device for cutting and coagulating |
| US10172636B2 (en) | 2013-09-17 | 2019-01-08 | Ethicon Llc | Articulation features for ultrasonic surgical instrument |
| US9861381B2 (en) * | 2013-11-12 | 2018-01-09 | Ethicon Llc | Removable battery casing for surgical instrument |
| US9763674B2 (en) * | 2013-12-26 | 2017-09-19 | Ethicon Llc | Ultrasonic bone cutting instrument |
| US10667835B2 (en) | 2014-04-22 | 2020-06-02 | Ethicon Llc | Ultrasonic surgical instrument with end effector having restricted articulation |
| US10258363B2 (en) | 2014-04-22 | 2019-04-16 | Ethicon Llc | Method of operating an articulating ultrasonic surgical instrument |
| KR20160107492A (ko) | 2015-03-04 | 2016-09-19 | 김용호 | 초음파 절삭기의 냉각 장치 및 그에 의한 초음파 절삭기의 냉각 방법 |
| US10226274B2 (en) | 2015-04-16 | 2019-03-12 | Ethicon Llc | Ultrasonic surgical instrument with articulation joint having plurality of locking positions |
| US10029125B2 (en) | 2015-04-16 | 2018-07-24 | Ethicon Llc | Ultrasonic surgical instrument with articulation joint having integral stiffening members |
| US10342567B2 (en) | 2015-04-16 | 2019-07-09 | Ethicon Llc | Ultrasonic surgical instrument with opposing thread drive for end effector articulation |
| US20160302818A1 (en) | 2015-04-16 | 2016-10-20 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instrument with movable rigidizing member |
| US20160302819A1 (en) * | 2015-04-16 | 2016-10-20 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instrument with articulating end effector having a curved blade |
| US11020140B2 (en) * | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| CN105310746B (zh) * | 2015-07-22 | 2018-04-24 | 以诺康医疗科技(苏州)有限公司 | 一种同时提高切割和止血效果的超声手术刀 |
| US10893914B2 (en) | 2015-10-19 | 2021-01-19 | Ethicon Llc | Surgical instrument with dual mode end effector and modular clamp arm assembly |
| US10314607B2 (en) * | 2015-12-21 | 2019-06-11 | Ethicon Llc | Ultrasonic surgical instrument with tubular acoustic waveguide segment |
| US10835255B2 (en) * | 2016-02-10 | 2020-11-17 | Covidien Lp | Adapter assemblies for interconnecting electromechanical handle assemblies and surgical loading units |
| JP6596576B2 (ja) * | 2016-03-28 | 2019-10-23 | オリンパス株式会社 | 関節用超音波処置具 |
| US10492819B2 (en) | 2016-04-01 | 2019-12-03 | Ethicon Llc | Surgical instrument with dual mode articulation drive |
| US10575836B2 (en) | 2016-04-04 | 2020-03-03 | Ethicon Llc | Surgical instrument with selectively locked articulation assembly |
| US10743850B2 (en) | 2016-04-04 | 2020-08-18 | Ethicon Llc | Surgical instrument with locking articulation drive wheel |
| US10507034B2 (en) | 2016-04-04 | 2019-12-17 | Ethicon Llc | Surgical instrument with motorized articulation drive in shaft rotation knob |
| US10405876B2 (en) | 2016-04-05 | 2019-09-10 | Ethicon Llc | Articulation joint for surgical instrument |
| CN109937018B (zh) * | 2016-11-09 | 2022-03-11 | 奥林巴斯株式会社 | 振动传递构件及超声波处置器具 |
| US10575917B2 (en) * | 2016-12-14 | 2020-03-03 | Ethicon Llc | Ultrasonic surgical instrument with integral torque wrench and transverse engagement |
| US11051866B2 (en) * | 2017-05-22 | 2021-07-06 | Cilag Gmbh International | Combination ultrasonic and electrosurgical instrument having ultrasonic waveguide with distal overmold member |
| JP6828162B2 (ja) * | 2017-07-21 | 2021-02-10 | オリンパス株式会社 | 超音波処置具のブレード、及び、超音波処置具 |
| WO2019076086A1 (zh) | 2017-10-19 | 2019-04-25 | 以诺康医疗科技(苏州)有限公司 | 一种超声波手术刀头、刀杆及超声波手术刀 |
| KR102012840B1 (ko) * | 2017-12-29 | 2019-08-21 | (의료)길의료재단 | 고온분무 흡입 초음파 절삭기 |
| US11540856B2 (en) * | 2018-05-31 | 2023-01-03 | Covidien Lp | Methods and systems for ultrasonic vessel sealing |
| JP6909930B2 (ja) | 2018-07-09 | 2021-07-28 | オリンパス株式会社 | 医療機器の再製造方法 |
| CN110811770B (zh) * | 2018-08-14 | 2023-04-07 | 北京锐诺医疗技术有限公司 | 一种超声刀传导杆及超声刀 |
| US11691858B2 (en) | 2019-03-15 | 2023-07-04 | Oshkosh Corporation | Scissor lift with offset pins |
| CN114040719A (zh) * | 2019-04-17 | 2022-02-11 | 柯惠有限合伙公司 | 用于超声手术器械的超声波导和刀片以及其制造方法 |
| US20200337760A1 (en) * | 2019-04-26 | 2020-10-29 | Covidien Lp | Single-use surgical instrument |
| KR102128489B1 (ko) | 2019-12-21 | 2020-06-30 | 주식회사 메타바이오메드 | 에너지 수집이 가능한 무선형 초음파 수술기 |
| USD956222S1 (en) | 2020-08-21 | 2022-06-28 | Stryker European Operations Limited | Surgical bur assembly |
| KR102600134B1 (ko) * | 2021-07-08 | 2023-11-08 | 김용훈 | 외과 수술용 드릴 |
| USD1024324S1 (en) * | 2021-08-11 | 2024-04-23 | Ezisurg Medical Co., Ltd. | Handle for surgical instrument |
| CN115770086A (zh) * | 2022-11-30 | 2023-03-10 | 苏州英途康医疗科技有限公司 | 电动施夹器 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4531524A (en) * | 1982-12-27 | 1985-07-30 | Rdm International, Inc. | Circuit apparatus and method for electrothermal treatment of cancer eye |
| US5322055B1 (en) * | 1993-01-27 | 1997-10-14 | Ultracision Inc | Clamp coagulator/cutting system for ultrasonic surgical instruments |
| US6066979A (en) * | 1996-09-23 | 2000-05-23 | Eldec Corporation | Solid-state high voltage linear regulator circuit |
| US5873873A (en) * | 1997-10-10 | 1999-02-23 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp mechanism |
| US5980510A (en) | 1997-10-10 | 1999-11-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp arm pivot mount |
| US6309400B2 (en) * | 1998-06-29 | 2001-10-30 | Ethicon Endo-Surgery, Inc. | Curved ultrasonic blade having a trapezoidal cross section |
| US6666875B1 (en) | 1999-03-05 | 2003-12-23 | Olympus Optical Co., Ltd. | Surgical apparatus permitting recharge of battery-driven surgical instrument in noncontact state |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US6918758B2 (en) * | 2003-03-25 | 2005-07-19 | John Jiin Chung Yang | Childproof safety disposable lighter |
| MX2007004151A (es) | 2004-10-08 | 2007-09-11 | Johnson & Johnson | Instrumento quirurgico ultrasonico. |
| GB2423931B (en) * | 2005-03-03 | 2009-08-26 | Michael John Radley Young | Ultrasonic cutting tool |
| US8016843B2 (en) | 2005-09-09 | 2011-09-13 | Alcon Research Ltd | Ultrasonic knife |
| US20070191713A1 (en) * | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US8114104B2 (en) | 2006-06-01 | 2012-02-14 | Ethicon Endo-Surgery, Inc. | Mechanism for assembly of ultrasonic instrument |
| US9693792B2 (en) * | 2006-10-18 | 2017-07-04 | Misonix, Incorporated | Ultrasonic treatment method and apparatus with active pain suppression |
| CN101600393B (zh) | 2007-01-16 | 2014-06-04 | 伊西康内外科公司 | 用于切割和凝结的超声装置 |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| WO2008154338A1 (en) * | 2007-06-07 | 2008-12-18 | Piezo Resonance Innovations, Inc. | Eye surgical tool |
| AU2008308606B2 (en) | 2007-10-05 | 2014-12-18 | Ethicon Endo-Surgery, Inc. | Ergonomic surgical instruments |
| US9107690B2 (en) * | 2007-12-03 | 2015-08-18 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| WO2010030850A2 (en) * | 2008-09-12 | 2010-03-18 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for fingertip control |
| US8461744B2 (en) | 2009-07-15 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Rotating transducer mount for ultrasonic surgical instruments |
| US9168054B2 (en) * | 2009-10-09 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US8951248B2 (en) * | 2009-10-09 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US9402682B2 (en) | 2010-09-24 | 2016-08-02 | Ethicon Endo-Surgery, Llc | Articulation joint features for articulating surgical device |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| US9381058B2 (en) | 2010-11-05 | 2016-07-05 | Ethicon Endo-Surgery, Llc | Recharge system for medical devices |
| US10238416B2 (en) * | 2012-04-30 | 2019-03-26 | Ethicon Llc | Ultrasonic device for cutting and coagulating |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
-
2013
- 2013-04-23 US US13/868,336 patent/US10238416B2/en active Active
- 2013-04-26 CA CA2871945A patent/CA2871945C/en active Active
- 2013-04-26 RU RU2014148146A patent/RU2669023C2/ru active
- 2013-04-26 WO PCT/US2013/038396 patent/WO2013165842A1/en active Application Filing
- 2013-04-26 AU AU2013256686A patent/AU2013256686A1/en not_active Abandoned
- 2013-04-26 EP EP21187407.8A patent/EP3919008B1/en active Active
- 2013-04-26 IN IN8803DEN2014 patent/IN2014DN08803A/en unknown
- 2013-04-26 JP JP2015510347A patent/JP6702721B2/ja active Active
- 2013-04-26 CN CN201380022660.3A patent/CN104271051B/zh active Active
- 2013-04-26 BR BR112014027043-0A patent/BR112014027043B1/pt active IP Right Grant
- 2013-04-26 EP EP13722906.8A patent/EP2844158B1/en active Active
- 2013-04-26 MX MX2014013199A patent/MX366565B/es active IP Right Grant
- 2013-04-26 KR KR1020147033350A patent/KR102198444B1/ko active IP Right Grant
-
2017
- 2017-10-11 AU AU2017245348A patent/AU2017245348B2/en not_active Ceased
-
2019
- 2019-02-12 US US16/273,214 patent/US11529164B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| AU2017245348A1 (en) | 2017-11-02 |
| CN104271051A (zh) | 2015-01-07 |
| KR102198444B1 (ko) | 2021-01-06 |
| KR20150008153A (ko) | 2015-01-21 |
| CA2871945A1 (en) | 2013-11-07 |
| AU2017245348B2 (en) | 2018-12-20 |
| JP6702721B2 (ja) | 2020-06-03 |
| CN104271051B (zh) | 2017-09-08 |
| IN2014DN08803A (pt) | 2015-05-22 |
| US20130289592A1 (en) | 2013-10-31 |
| BR112014027043A2 (pt) | 2017-06-27 |
| JP2015516231A (ja) | 2015-06-11 |
| US10238416B2 (en) | 2019-03-26 |
| AU2013256686A1 (en) | 2014-10-23 |
| MX2014013199A (es) | 2014-12-08 |
| US11529164B2 (en) | 2022-12-20 |
| RU2014148146A (ru) | 2016-06-20 |
| EP2844158A1 (en) | 2015-03-11 |
| US20190247082A1 (en) | 2019-08-15 |
| RU2669023C2 (ru) | 2018-10-05 |
| MX366565B (es) | 2019-07-11 |
| WO2013165842A1 (en) | 2013-11-07 |
| EP2844158B1 (en) | 2021-11-03 |
| EP3919008A1 (en) | 2021-12-08 |
| EP3919008B1 (en) | 2024-03-27 |
| CA2871945C (en) | 2020-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112014027043B1 (pt) | Aparelho para operação em tecido | |
| US10709906B2 (en) | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments | |
| CN105764435B (zh) | 具有电外科特征部的超声外科器械 | |
| BR112016010807B1 (pt) | Aparelho | |
| BR112016021794B1 (pt) | Instrumento cirúrgico | |
| BR112016005963B1 (pt) | Aparelho para operar em tecido | |
| BR112019024368A2 (pt) | instrumento eletrocirúrgico e ultrassônico combinado que tem guia de onda ultrassônica com membro de sobreposição distal | |
| BR112016011571B1 (pt) | Aparelho para operar em tecido e método de fixação de um conjunto de eixo a um conjunto de corpo do referido aparelho | |
| BR112018012567B1 (pt) | Instrumento ultrassônico com força de aperto variável | |
| BR112019012145A2 (pt) | instrumento cirúrgico ultrassônico com transdutor de junta deslizante | |
| BR112016010518B1 (pt) | Instrumento cirúrgico | |
| US20100298743A1 (en) | Thermally-activated coupling arrangements and methods for attaching tools to ultrasonic surgical instruments | |
| BR112016011719B1 (pt) | Aparelho para recursos de luva resiliente para lâmina ultrassônica de um instrumento cirúrgico | |
| BR112015013319B1 (pt) | Instrumento ultrassônico | |
| BR112017001211B1 (pt) | Instrumento ultrassônico e método para montagem de um instrumento ultrassônico | |
| BR112017007683B1 (pt) | Instrumento ultrassônico | |
| BR112015022948B1 (pt) | Aparelho para operar em tecido | |
| BR112018012563B1 (pt) | Aparelho com recursos de substituição de lâmina | |
| AU2010249539A1 (en) | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments | |
| BR112018077494B1 (pt) | Instrumento cirúrgico ultrassônico com recurso de deflexão de braço de aperto | |
| BR112018012535B1 (pt) | Instrumento cirúrgico ultrassônico com segmento tubular de guia de ondas acústicas | |
| WO2012114977A1 (ja) | 超音波プローブ及び超音波処置装置 | |
| EP3000424A1 (en) | Ultrasonic treatment device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B07A | Application suspended after technical examination (opinion) [chapter 7.1 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 26/04/2013, OBSERVADAS AS CONDICOES LEGAIS. |