WO2022113740A1 - 車両統合制御装置、および、車両統合制御方法 - Google Patents
車両統合制御装置、および、車両統合制御方法 Download PDFInfo
- Publication number
- WO2022113740A1 WO2022113740A1 PCT/JP2021/041337 JP2021041337W WO2022113740A1 WO 2022113740 A1 WO2022113740 A1 WO 2022113740A1 JP 2021041337 W JP2021041337 W JP 2021041337W WO 2022113740 A1 WO2022113740 A1 WO 2022113740A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- command
- control device
- vehicle
- vehicle integrated
- external
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 14
- 230000001133 acceleration Effects 0.000 claims description 42
- 201000003152 motion sickness Diseases 0.000 claims description 17
- 230000035945 sensitivity Effects 0.000 claims description 16
- 230000000295 complement effect Effects 0.000 claims description 11
- 230000009469 supplementation Effects 0.000 abstract 1
- 230000001502 supplementing effect Effects 0.000 abstract 1
- 239000000725 suspension Substances 0.000 description 18
- 238000004364 calculation method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 230000006866 deterioration Effects 0.000 description 6
- 210000003128 head Anatomy 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 2
- 230000035900 sweating Effects 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 230000004886 head movement Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0013—Planning or execution of driving tasks specially adapted for occupant comfort
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/22—Conjoint control of vehicle sub-units of different type or different function including control of suspension systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/025—Control of vehicle driving stability related to comfort of drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/10—Interpretation of driver requests or demands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/16—Pitch
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/18—Roll
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/221—Physiology, e.g. weight, heartbeat, health or special needs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/16—Pitch
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/18—Roll
Definitions
- the present invention relates to a vehicle integrated control device that controls the posture of a vehicle so as to improve the driver's operability and the ride quality of a occupant, and a vehicle integrated control method.
- Patent Document 1 As a conventional vehicle attitude control device for controlling the attitude of a vehicle, the one described in Patent Document 1 is known.
- the abstract of Patent Document 1 relates to a vehicle attitude control device that "can reduce the power consumption for attitude control without sacrificing the performance of attitude control" and "the degree of freedom of attitude control".
- the target value calculation unit 42 calculates the target motion state amount of the number of degrees of freedom based on the state of the vehicle.
- the control force calculation unit 44 calculates the control force vector so that the square norm of the control force vector for driving the attitude control device is minimized and the target motion state amount is realized. " There is.
- Track value calculation unit 42 outputs the calculated target vertical force Fz, target roll moment Mx, target pitch moment My, target yaw moment Mz, and target front-rear force Fx to the control force calculation unit 44.
- the target force Fx, Fz, the target moment Mx, My, and Mz 5 calculated by the target value calculation unit 42 are calculated.
- the control force calculation unit 44 calculates a control force vector such as a control driving force F d and an active suspension generating force FAS to realize desired attitude control.
- the vehicle attitude control in Patent Document 1 is mainly for controlling power consumption, and is not intended to improve the operability of the driver and the ride quality of the occupants. Therefore, in the vehicle attitude control of Patent Document 1, the target left-right force Fy is not taken into consideration when calculating the control force vector, and as a result of suppressing the power consumption, the operability of the driver and the riding comfort of the occupant are impaired. Left-right force may be generated.
- a vehicle in an environment where external commands are insufficient, a vehicle that generates internal commands that complement the insufficient external commands and controls each actuator in an integrated manner so as to improve the operability of the driver and the ride comfort of the occupants. It is an object of the present invention to provide an integrated control device and a vehicle integrated control method.
- the vehicle integrated control device of the present invention controls a plurality of actuators mounted on the vehicle in an integrated manner, and controls the vehicle with six control axes of front / rear, left / right, up / down, roll, pitch, and yaw. It is a vehicle integrated control device, and corresponds to the external command based on the command value acquisition unit that acquires the external command corresponding to the control axis of 1 or more and 6 or less for realizing the desired driving operation, and the external command. It is provided with a command value complementing unit that generates an internal command corresponding to a control axis other than the control axis to be operated, and an operation amount control distribution unit that controls the plurality of actuators based on the external command and the internal command. did.
- each actuator can be controlled in an integrated manner.
- Functional block diagram of the vehicle integrated control device of the first embodiment Explanatory diagram of an example of the calculation method of motion sickness incidence Plan view showing a vehicle entering the left curve A specific example of how to generate an internal command by the command value complement unit Attitude control of vehicle 1 by the motor driving force shown in FIG. 6 (d) Plan view showing a vehicle changing lanes
- Functional block diagram of the vehicle integrated control device of the second embodiment A specific example of how to limit external commands by the command value complement section
- FIG. 1 is a plan view showing the overall configuration of the vehicle 1 of the present embodiment.
- 2 is a vehicle integrated control device
- 3 is an external control device
- 4 is a combine sensor
- 11 is a wheel
- 12 is a motor
- 13 is a brake mechanism
- 14 is a steering mechanism
- 15 is a suspension
- 16 is an accelerator pedal
- 17 Is the brake pedal and 18 is the steering wheel.
- FL is a symbol indicating that the front left
- FR is the front right
- RL is the rear left
- RR is the rear right.
- the RRs are the left front wheel, the right front wheel, the left rear wheel, and the right rear wheel, respectively.
- F is a symbol indicating that the configuration corresponds to the front side
- R is a symbol corresponding to the rear side.
- the front-rear direction of the vehicle 1 is defined as the x-axis (front direction is positive)
- the left-right direction is defined as the y-axis (left direction is positive)
- the vertical direction is defined as the z-axis (upward direction is positive).
- the vehicle integrated control device 2 is operated by the driver, an external command from the external control device 3, and a detection signal of the combine sensor 4 (front / rear, left / right, up / down acceleration, and roll, pitch, and yaw rates. It is a control device that integrally controls each actuator such as a motor 12, a brake mechanism 13, a steering mechanism 14, and a suspension 15 according to a detection signal relating to a control axis having a total of 6 degrees of freedom.
- the vehicle integrated control device 2 is an ECU (Electronic Control Unit) including hardware such as an arithmetic unit such as a CPU, a main storage device such as a semiconductor memory, an auxiliary storage device, and a communication device. .. Then, each function described later is realized by the arithmetic unit executing the program loaded from the auxiliary storage device to the main storage device, but the following will be described while omitting such a well-known technique as appropriate.
- ECU Electronic Control Unit
- the external control device 3 is a host controller for executing driving support control and automatic driving control via the vehicle integrated control device 2, and is external world information acquired by various external world sensors (camera, radar, LiDAR, etc.) (not shown). To realize speed command value and acceleration command value to realize adaptive cruise control (ACC) that follows the preceding vehicle, or lane keep control (LKC) to maintain driving in the lane. Yaw command values and the like are calculated and output to the vehicle integrated control device 2 as external commands.
- the vehicle integrated control device 2 and the external control device 3 are separate bodies in FIG. 1, both may be realized by one ECU.
- the vehicle 1 is equipped with a torque generator that applies a driving force to each of the wheels 11 as a main part of the drive system.
- a torque generator that applies a driving force to each of the wheels 11 as a main part of the drive system.
- An example of this torque generator is an engine or motor that transmits driving force to a pair of left and right wheels 11 via a differential gear and a drive shaft.
- Another example of the torque generator is an in-wheel motor type motor 12 that independently drives each wheel 11.
- the details of the present embodiment will be described on the premise of the vehicle structure of FIG. 1 in which the in-wheel motor type motor 12 is mounted on each wheel 11.
- the driver When the driver wants to move the vehicle 1 forward (or backward), the driver sets the shift lever to a desired setting and then operates the accelerator pedal 16. At this time, the stroke sensor 16a detects the depression amount of the accelerator pedal 16, and the acceleration control device 16b outputs an accelerator command converted from the depression amount to the vehicle integrated control device 2.
- the vehicle integrated control device 2 supplies electric power corresponding to the input accelerator command from a battery (not shown) to the motors 12 of each wheel, and controls the motor torque of each wheel. As a result, the vehicle 1 can be accelerated / decelerated according to the operation of the accelerator pedal 16.
- the vehicle integrated control device 2 supplies desired electric power to the motor 12 of each wheel in response to the input external command. By doing so, each motor torque is controlled. As a result, the vehicle 1 is accelerated / decelerated, and desired driving support and automatic driving are executed.
- the vehicle 1 is equipped with a wheel cylinder 13a that applies a braking force to each of the wheels 11 as a main part of the braking system.
- the foil cylinder 13a is composed of, for example, a cylinder, a piston, a pad, a disc rotor, and the like.
- the piston is propelled by the hydraulic fluid supplied from the master cylinder, and the pad connected to the piston is pressed against the disc rotor rotating together with the wheel 11, so that the brake torque acting on the disc rotor is applied. Is the braking force acting between the wheel 11 and the road surface.
- the driver When the driver wants to brake the vehicle 1, the driver operates the brake pedal 17. At this time, the pedaling force at which the driver steps on the brake pedal 17 is increased by the brake booster (not shown), and the master cylinder generates hydraulic pressure substantially proportional to the pedaling force.
- the generated hydraulic pressure is supplied to the wheel cylinders 13a FL , 13a FR , 13a RL , and 13a RR of each wheel via the brake mechanism 13, so that the wheel cylinder 13a of each wheel is supplied according to the driver's brake pedal operation.
- the piston is pressed against the disc rotor and generates braking force on each wheel.
- the brake booster and the master cylinder may be omitted. In that case, if the brake pedal 17 and the brake mechanism 13 are directly connected and the driver steps on the brake pedal 17.
- the brake mechanism 13 may be a mechanism that operates directly.
- the vehicle integrated control device 2 and the brake mechanism 13 via the braking control device 13b in response to the input external command.
- the wheel cylinder 13a of each wheel is controlled.
- the braking control device 13b also has a function of converting the amount of operation of the brake pedal 17 by the driver into a brake command and outputting it to the vehicle integrated control device 2 as an external command.
- the vehicle 1 is equipped with a steering mechanism 14 that gives steering force to each wheel 11 as a main part of the steering system.
- the front steering mechanism 14 F for steering the front wheels 11 F left front wheel 11 FL , right front wheel 11 FR
- the rear steering mechanism 14 R left rear wheel 11 RL , right rear wheel 11 RR
- the steering mechanism 14 R on the side is shown, it is not necessary to provide the steering mechanism 14 on the front and rear, and for example, the steering mechanism 14 R on the rear side may be omitted.
- the driver When the driver wants to steer the vehicle 1, the driver operates the steering wheel 18. At this time, the "steering torque" and the “steering angle” input by the driver via the steering wheel 18 are detected by the steering torque detecting device 18a and the steering angle detecting device 18b.
- the front steering control device 14a F controls the front steering motor 14b F based on the detected steering torque and steering angle to generate an assist torque for steering the front wheels 11F .
- the rear steering control device 14a R controls the rear steering motor 14b R based on the detected steering torque and steering angle to provide an assist torque for steering the rear wheels 11 R. generate.
- the vehicle integrated control device 2 controls the steering torque of the steering motor 14b via the steering control device 14a. As a result, the vehicle 1 is braked, and desired driving support and automatic driving are executed.
- the vehicle 1 is equipped with a suspension 15 as a main part of the suspension system, which absorbs vibrations and impacts generated on each wheel 11 to improve the stability and riding comfort of the vehicle body.
- the suspension 15 is, for example, a semi-active suspension in which a damper and a coil spring whose viscosity can be changed are combined, or an actuator whose length is adjustable, a damper and a coil spring, and the relative distance between the vehicle body and the wheel 11 is arbitrarily changed. It is a fully active suspension that can be used.
- the vehicle integrated control device 2 not only improves the riding comfort by controlling the viscosity of the semi-active suspension and the length of the fully active suspension, but also appropriately controls the posture of the vehicle 1 according to the environment.
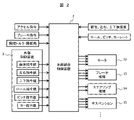
- FIG. 2 is a schematic diagram listing input / output signals of the vehicle integrated control device 2.
- the vehicle integrated control device 2 has an accelerator command, a brake command, a steering torque, a steering angle, etc. generated by the driver operating the accelerator pedal 16, the brake pedal 17, the steering wheel 18, and the like. Input as an external command.
- the vehicle integrated control device 2 has a front-rear acceleration command value, a left-right acceleration command value, a vertical acceleration command value, a roll command value, and a pitch command value generated by the external control device 3 during driving support control or automatic driving control.
- Yaw command values a total of 6 degrees of freedom external commands are input. Further, the vehicle integrated control device 2 is input with the front / rear, left / right, up / down accelerations, and the detected values of the roll, pitch, and yaw rates from the combine sensor 4.
- the vehicle integrated control device 2 has a motor 12 (12 FL to 12 RR ), a brake mechanism 13 (wheel cylinder 13a FL to 13a RR ), and a steering mechanism 14 (steering motor) based on the above-mentioned external commands and detected values.
- vehicle control Since the vehicle 1 in FIG. 1 corresponds to manual driving, an external command caused by the driver is also exemplified in FIG. 2, but the present invention is a vehicle corresponding only to fully automatic driving or remote control. 1 can also be applied, in which case the configuration may be such that the external command caused by the driver is omitted.
- FIG. 3 is a functional block diagram of the vehicle integrated control device 2.
- FIG. 2 illustrates a vehicle integrated control device 2 in which three types of external commands caused by the driver are input and six types of external commands are input from the external control device 3, but the specifications of the external control device 3 are specified. Depending on the situation, one of the external commands may not be input.
- the details of the vehicle integrated control device 2 of this embodiment will be described by taking as an example a situation in which any of the external commands that can be input is missing.
- any of the six types of external commands front-back acceleration command value, left-right acceleration command value, up-down acceleration command value, roll command value, pitch command value, yaw command value
- the three types of command values are referred to as the first command value to the third command value.
- the vehicle integrated control device 2 of the present embodiment is not input so as to be able to realize attitude control that does not impair the driver's operability and the ride quality of the occupant even when the types of input external commands are insufficient.
- An internal command that replaces the command is generated, and the operation amount of the motor 12 and the like is appropriately distributed in consideration of this internal command.
- the vehicle integrated control device 2 of this embodiment includes a command value acquisition unit 21, a command value complement unit 22, and an operation amount control unit 23.
- the command value acquisition unit 21 acquires an external command from the external control device 3 and outputs it to the command value complement unit 22 and the operation amount control unit 23. Specifically, the input type of external command is output as it is to the command value complement unit 22 and the operation amount control unit 23, and the invalid signal (for example, Null) is output as the command value for the type of external command that is not input. Output to the complement 22.
- the command value acquisition unit 21 issues those external commands from the external control device 3. It shall be converted and output to the front-back acceleration command value, left-right acceleration command value, and yaw command value of the same type as the external command.
- the command value complementing unit 22 generates an internal command of the same type as the external command of the type not input or can be used as an alternative based on the external command of the input type, and outputs the internal command to the operation amount control unit 23.
- the method of generating an internal command by the command value complementing unit 22 will be described later.
- the operation amount control unit 23 appropriately controls the distribution of the operation amount of the motor 12 and the like based on the external command input from the outside and the internal command generated by the command value complement unit 22. As a result, it is possible to control the motor 12 and the like so as to improve the operation feeling of the driver and the ride comfort of the occupant even with respect to the vehicle posture and the like corresponding to the type of external command not input from the external control device 3.
- the motion sickness incidence rate (MSI), which is an example of a sensitivity index for evaluating the ride quality of an occupant, will be described.
- a paper by Takahiro Wada et al. Is known as a document on motion sickness (so-called "motion sickness") (Takahiro Wada, Satoshi Fujisawa, Katsuya Imaizumi, Tokumasa Uechi, Shunichi Doi, Suppression of motion sickness in driver's head movement. Analysis of effects, Proceedings of the Society of Automotive Engineers of Japan, Vol. 41, No. 5, pp. 999-1004, 2010.).
- the motion sickness incidence rate (MSI) can be calculated by the method shown in FIG.
- the "head acceleration” and "head angular velocity” in the figure are the acceleration and the angular velocity received by the occupant's head while the vehicle is driving.
- the command value complementing unit 22 Since the motion sickness incidence rate (MSI) is an index that the ride quality is considered to be better as it is smaller, it is desired that the command value complementing unit 22 generate an internal command so that the motion sickness incidence rate (MSI) becomes smaller.
- the command value complementing unit 22 has already learned the correspondence between the sensitivity index and the internal command, and improves the motion sickness incidence rate (MSI) without measuring the head acceleration and head angular velocity of the occupant in real time. It shall be possible to generate an internal signal.
- MSDV Motion Sickness Dose Value
- This is a value obtained by extracting a specific frequency component that is considered to be particularly prone to motion sickness among the accelerations generated in the human body, and it is generally known that the higher this value is, the more prone to motion sickness. There is. Therefore, when paying attention to this sensitivity index, the command value complementing unit 22 generates an internal command for controlling the front-back, left-right, and up-down accelerations so as not to generate the specific frequency component.
- the sensitivity index is the time constant for the steering angle. This defines the response time (delay time) of each rate of left-right acceleration, roll, and yaw as a time constant with respect to the change in steering angle, and the difference between the time constants related to the above three momentums is small (3). It is generally known that (they have similar values) makes the car easier to drive. Therefore, when paying attention to this sensitivity index, the command value complementing unit 22 uses this "difference in time constant" as an index to generate an internal command for controlling left / right / roll / yaw so as to reduce the index. ..
- a biological signal for example, sweating / heartbeat
- the command value complementing unit 22 when paying attention to this sensitivity index, the command value complementing unit 22 generates an internal command for controlling the momentum of the six axes so that the biological signal is improved.
- FIG. 5 is a plan view showing the vehicle 1 entering the left curve, and the driving operation executed here is a left turn.
- the roads shown here have a first section (to A) with a curvature of 0, a second section (A to B) in which the curvature gradually increases, and a third section (B to C) having a constant curvature. It can be divided into a fourth section (C to D) that gradually decreases and a fifth section (D to) having a curvature of 0.
- FIG. 6A shows an external command “yaw command value” required for steering control given to the vehicle integrated control device 2 by the external control device 3 when the vehicle 1 travels on the left curve of FIG. ..
- the yaw command value required in the first section (to A) and the fifth section (D to) having a curvature of 0 is 0.
- the yaw command value required in the second section (A to B) in which the curvature gradually increases is monotonically increased, and is required in the fourth section (C to D) in which the curvature gradually decreases.
- the yaw command value decreases monotonically.
- the yaw command value required in the third section (B to C) having a constant curvature is constant.
- FIG. 6B is a left-right acceleration actually generated when the vehicle 1 is driven according to the yaw command value of FIG. 6A.
- the command value complementing unit 22 calculates the left-right acceleration of FIG. 6B as an internal command prior to the actual running. Can be done.
- the broken line in FIG. 6 (c) is the roll angle of the vehicle 1 predicted to be generated by the lateral acceleration in FIG. 6 (b) in the conventional technique that does not adopt the control of this embodiment.
- the roll angle when tilting to the right is defined as positive, and the roll angle in the left direction is defined as negative. Therefore, the control of the present embodiment is executed for the vehicle 1 traveling on the left curve of FIG. If not, it can be seen that a roll tilting to the right occurs.
- a large motion sickness incidence rate (MSI) as shown by the broken line of FIG. 6 (e) is calculated, and deterioration of ride quality is confirmed.
- the solid line in FIG. 6C is the roll angle generated as an internal command by the command value complementing unit 22 of this embodiment.
- the roll angle generated here corresponds to an internal command for tilting the vehicle 1 traveling on the left curve of FIG. 5 to the left.
- MSI motion sickness incidence rate
- FIG. 6D exemplifies the motor driving force generated by the operation amount control unit 23 in each motor 12 in order to realize the roll angle shown by the solid line in FIG. 6C. That is, from the second section to the fourth section, the motor driving force in the positive direction is generated in the front left and rear motors 12 FL and 12 RR , and the motors in the negative direction are generated in the front right and rear motors 12 FR and 12 RL . Generates driving force.
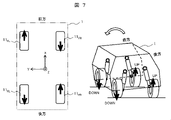
- FIG. 8 is a plan view showing a vehicle 1 traveling on a straight road with two lanes on each side, and the driving operation executed here is a lane change from the right lane to the left lane.
- the road shown here can be divided into a sixth section (to E) scheduled to go straight, a seventh section (E to F) scheduled to change lanes, and an eighth section (F to) scheduled to go straight.
- FIG. 9A shows an external command “yaw command value” required for steering control given to the vehicle integrated control device 2 by the external control device 3 when the vehicle 1 implements the lane change of FIG. ..
- the yaw command value required in the sixth section (to E) and the eighth section (F to) scheduled to go straight is 0.
- a positive yaw command value is given in the front stage of the seventh section (E to F) where the lane is scheduled to be changed, and a non-directional yaw command value is given in the rear stage.
- FIG. 9 (b) shows the left-right acceleration actually generated when the vehicle 1 is driven according to the yaw command value of FIG. 9 (a).
- the command value complementing unit 22 may calculate the left-right acceleration of FIG. 9B as an internal command prior to the actual running. can.
- the broken line in FIG. 9 (c) is the roll angle of the vehicle 1 predicted to be generated by the lateral acceleration in FIG. 9 (b) in the conventional technique that does not adopt the control of this embodiment.
- the lateral acceleration and the roll angle have substantially the same shape, but the roll angle may be delayed from the lateral acceleration due to the physical characteristics of the suspension system. This delay can occur even in the environment shown in FIG. 5, but unlike the left turn in FIG. 5, which takes a relatively long time, the lane change in FIG. 8 is completed in a relatively short time, so that the time for lateral acceleration and roll angle is long. The effect of deviation on the deterioration of riding comfort is large.
- a roll angle synchronized with the left-right acceleration in FIG. 9 (b) is generated as an internal command.
- the roll angle generated here corresponds to an internal command for tilting the vehicle 1 traveling in the seventh section of FIG. 8 to the right first and then to the left, for example, as shown in FIG. 9 (d). It controls the suspension stroke.
- the difference in the response time (delay time) of each rate of the left-right acceleration, the roll, and the yaw with respect to the steering angle becomes small, and the running stability of the vehicle 1 is improved, so that the improvement of the riding comfort can be confirmed. Note that it is not necessary to completely synchronize FIGS. 9 (b) and 9 (c), as long as the time delay between them is equal to or less than a predetermined value.
- each actuator can be controlled in an integrated manner so as to improve the riding comfort of the vehicle.
- an external command is given to the operation amount control unit 23 as it is, and it is allowed that the sensitivity index is deteriorated by the vehicle control based on the external command. Met.
- the command value complementing unit 22 of the present embodiment has an external command (from the first command value to the third command value) and a variable permissible range (from the first permissible width to the third permissible width). Based on the above, an internal command that can improve the sensitivity index is generated, and at the same time, an external command is modified so as not to cause deterioration of the sensitivity index.
- FIG. 11 is a graph for specifically explaining the control by the vehicle integrated control device 2 of the present embodiment, and is premised on traveling in the same environment as FIGS. 5 and 6 of the first embodiment. ..
- FIG. 11 (a) and 11 (b) are the "yaw command value” and the "front-back acceleration command value” input as external commands, and FIG. 11 (c) shows the "front-back acceleration command value” set as the front-back acceleration command value. Acceleration allowable width ". Note that FIG. 11A is equivalent to FIG. 6A.
- FIG. 11 (d) shows the corrected front-rear acceleration command value (external command) generated based on the front-rear acceleration (external command) in FIG. 11 (b) and the left-right acceleration (internal command) in FIG. 6 (b). be.
- the corrected front-back acceleration command value (external command) shown here is proportional to the time change of the left-right acceleration with a first-order delay of a predetermined time constant, and an amount that does not exceed the allowable fluctuation range is added to the front-back acceleration or It is a command generated by subtraction.
- the operation amount control unit 23 controls the motor driving force and the brake braking force as shown in FIGS. 11 (e) and 11 (f) to allow deterioration of the sensitivity index within a predetermined allowable range. Can be stored inside.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
Description
図1は、本実施例の車両1の全体構成を示す平面図である。図1において、2は車両統合制御装置、3は外部制御装置、4はコンバインセンサ、11は車輪、12はモータ、13はブレーキ機構、14はステアリング機構、15はサスペンション、16はアクセルペダル、17はブレーキペダル、18はハンドルである。図中、FLは左前、FRは右前、RLは左後、RRは右後に対応する構成であることを示す符号であり、車輪11を例にすれば、11FL、11FR、11RL、11RRはそれぞれ、左前輪、右前輪、左後輪、右後輪である。また、Fは前側、Rは後側に対応する構成であることを示す符号である。
車両統合制御装置2は、運転者の操作や、外部制御装置3からの外部指令、および、コンバインセンサ4の検出信号(前後、左右、上下の各加速度、および、ロール、ピッチ、ヨーの各レートの合計6自由度の制御軸に関する検出信号)に応じて、モータ12、ブレーキ機構13、ステアリング機構14、サスペンション15等の各アクチュエータを統合制御する制御装置である。この車両統合制御装置2は、具体的には、CPU等の演算装置、半導体メモリ等の主記憶装置、補助記憶装置、および、通信装置などのハードウェアを備えたECU(Electronic Control Unit)である。そして、補助記憶装置から主記憶装置にロードしたプログラムを演算装置が実行することで、後述する各機能を実現するが、以下では、このような周知技術を適宜省略しながら説明する。
外部制御装置3は、車両統合制御装置2を介して運転支援制御や自動運転制御を実行するための上位コントローラであり、図示しない各種の外界センサ(カメラ、レーダ、LiDAR等)が取得した外界情報に基づいて、先行車に追従するアダプティブ・クルーズ・コントロール(ACC)を実現するための速度指令値や加速指令値、あるいは、車線内走行を維持するレーン・キープ・コントロール(LKC)を実現するためのヨー指令値等を演算し、それらを外部指令として車両統合制御装置2に出力する。なお、図1では、車両統合制御装置2と外部制御装置3を別体としているが、両者を一つのECUで実現しても良い。
ここで、車両1の駆動系を説明する。車両1は、駆動系の要部として、各々の車輪11に駆動力を与えるトルク発生装置を搭載している。このトルク発生装置の一例は、デファレンシャルギアとドライブシャフトを介して左右一対の車輪11に駆動力を伝達するエンジンやモータである。トルク発生装置の他の例は、各々の車輪11を独立駆動させるインホイールモータ式のモータ12である。以下では、インホイールモータ式のモータ12を各々の車輪11に搭載した、図1の車両構造を前提に本実施例の詳細を説明する。
次に、車両1の制動系を説明する。車両1は、制動系の要部として、各々の車輪11に制動力を与えるホイルシリンダ13aを搭載している。このホイルシリンダ13aは、例えば、シリンダ、ピストン、パッド、ディスクロータ等から構成されている。このホイルシリンダ13aでは、マスタシリンダから供給された作動液によってピストンが推進され、ピストンに連結されたパッドが車輪11と共に回転しているディスクロータに押圧されることで、ディスクロータに作用したブレーキトルクが、車輪11と路面との間に作用する制動力となる。
次に、車両1の操舵系を説明する。車両1は、操舵系の要部として、各々の車輪11に操舵力を与えるステアリング機構14を搭載している。図1では、前輪11F(左前輪11FL、右前輪11FR)を操舵する前側のステアリング機構14Fと、後輪11R(左後輪11RL、右後輪11RR)を操舵する後側のステアリング機構14Rを示しているが、前後にステアリング機構14を備える必要は無く、例えば、後側のステアリング機構14Rを省略しても良い。
次に、車両1の懸架系を説明する。車両1は、懸架系の要部として、各々の車輪11に発生する振動や衝撃を吸収し、車体の安定性、乗り心地を良くするための、サスペンション15を搭載している。このサスペンション15は、例えば、粘性を変更可能なダンパとコイルスプリングを組み合わせたセミアクティブサスペンションや、長さを調節可能なアクチュエータとダンパとコイルスプリングを組み合わせ、車体と車輪11の相対距離を任意に変更できるフルアクティブサスペンションである。
次に、図2を用いて、車両統合制御装置2の入出力を説明する。図2は、車両統合制御装置2の入出力信号を列挙した概略図である。ここに示すように、車両統合制御装置2には、運転者がアクセルペダル16、ブレーキペダル17、ハンドル18等を操作することで生成された、アクセル指令、ブレーキ指令、操舵トルク、操舵角等が外部指令として入力される。また、車両統合制御装置2には、運転支援制御中や自動運転制御中に外部制御装置3が生成した、前後加速指令値、左右加速指令値、上下加速指令値、ロール指令値、ピッチ指令値、ヨー指令値の、合計6自由度の外部指令が入力される。さらに、車両統合制御装置2には、コンバインセンサ4から、前後、左右、上下の各加速度、および、ロール、ピッチ、ヨーの各レートの各検出値が入力される。
図3は、車両統合制御装置2の機能ブロック図である。図2では、運転者起因の3種の外部指令が入力され、また、外部制御装置3からの6種の外部指令が入力される車両統合制御装置2を例示したが、外部制御装置3の仕様次第では、何れかの外部指令が入力されない可能性もある。以下では、入力可能な外部指令のうち何れかの外部指令が欠落している状況を例に、本実施例の車両統合制御装置2の詳細を説明する。なお、以下では、外部制御装置3から入力可能な6種の外部指令(前後加速指令値、左右加速指令値、上下加速指令値、ロール指令値、ピッチ指令値、ヨー指令値)のうち、任意の3種の指令値を、第一指令値から第三指令値と称する。
ここで、図4を用いて、乗員の乗り心地を評価する感性指標の一例である動揺病発症率(MSI)について説明する。動揺病(いわゆる「車酔い」)に関する文献としては、和田隆広らの論文が知られている(和田 隆広, 藤澤 智, 今泉 克哉, 上地 徳昌, 土居 俊一, ドライバ頭部運動の動揺病抑制効果の解析, 自動車技術会論文集, Vol. 41, No. 5, pp. 999-1004, 2010.)。この文献によれば、図4に示す方法で動揺病発症率(MSI)を演算できる。なお、図中の「頭部加速度」と「頭部角速度」は、車両の運転中に乗員の頭部が受ける加速度と角速度である。
乗員が動揺病を発症した場合、心拍数の増加、掌部または額部の発汗が見られることが一般に知られている。従って、この感性指標に着目する場合は、指令値補完部22は、この生体信号が改善するように6軸の運動量を制御するような内部指令を生成する。
次に、図5から図7を用いて、所望の運転動作を実行する際の、指令値補完部22による内部指令の生成方法の一具体例を説明する。
次に、図8と図9を用いて、所望の運転動作を実行する際の、指令値補完部22による内部指令の生成方法の他の具体例を説明する。
Claims (9)
- 車両に搭載した複数のアクチュエータを統合制御して、前後・左右・上下・ロール・ピッチ・ヨーの6制御軸で前記車両を制御する車両統合制御装置であって、
所望の運転動作を実現するための1以上6以下の制御軸に対応する外部指令を取得する指令値取得部と、
前記外部指令に基づいて、前記外部指令に対応する制御軸以外の制御軸に対応する内部指令を生成する指令値補完部と、
前記外部指令と前記内部指令に基づいて前記複数のアクチュエータを制御する操作量制御配部と、
を具備することを特徴とする車両統合制御装置。 - 請求項1に記載の車両統合制御装置において、
前記内部指令は、前記車両の乗員に関する感性指標を改善するように、前記複数のアクチュエータを制御する指令であることを特徴とする車両統合制御装置。 - 請求項2に記載の車両統合制御装置において、
前記感性指標は、乗員の動揺病発症率、MSDV(Motion Sickness Dose Value)、操舵角に対する時定数、または、乗員の生体信号の何れかであることを特徴とする車両統合制御装置。 - 請求項2に記載の車両統合制御装置において、
前記指令値補完部は、前記外部指令として左右またはヨーの制御軸に関する指令が入力された場合には、左右加速度とロール角が、同位相、または、所定以内の時間差となるように前記内部指令を生成することを特徴とする車両統合制御装置。 - 請求項2に記載の車両統合制御装置において、
前記指令値補完部は、前記外部指令の夫々に設定された変動許容幅に基づいて、前記外部指令を修正することを特徴とする車両統合制御装置。 - 請求項5に記載の車両統合制御装置において、
前記指令値補完部は、前記外部指令として、前後、および、左右またはヨーの制御軸に関する指令が入力された場合には、
前後の時間軸に関する外部指令を、左右加速度の時間変化に比例し、かつ、前記変動許容幅を超えない量を加算または減算することで修正することを特徴とする車両統合制御装置。 - 請求項1から請求項6の何れか一項に記載の車両統合制御装置において、
前記外部指令は、外部制御装置から入力された、運転支援制御または自動運転制御を実行するための指令であることを特徴とする車両統合制御装置。 - 請求項1から請求項6の何れか一項に記載の車両統合制御装置において、
前記外部指令は、運転者によるハンドル、アクセルペダル、または、ブレーキペダルの操作に基づいて生成した、前後、左右、ヨーの何れかの制御軸に関する指令であることを特徴とする車両統合制御装置。 - 車両に搭載した複数のアクチュエータを統合制御して、前後・左右・上下・ロール・ピッチ・ヨーの6制御軸で前記車両を制御する車両統合制御方法であって、
所望の運転動作を実現するための1以上6以下の制御軸に対応する外部指令を取得するステップと、
前記外部指令に基づいて、前記外部指令に対応する制御軸以外の制御軸に対応する内部指令を生成するステップと、
前記外部指令と前記内部指令に基づいて前記複数のアクチュエータを制御するステップと、
を具備することを特徴とする車両統合制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180078737.3A CN116507539A (zh) | 2020-11-25 | 2021-11-10 | 车辆综合控制装置以及车辆综合控制方法 |
| US18/037,658 US20230415775A1 (en) | 2020-11-25 | 2021-11-10 | Vehicle integrated-control device and vehicle integrated-control method |
| EP21897714.8A EP4253180A1 (en) | 2020-11-25 | 2021-11-10 | Vehicle integrated-control device, and vehicle integrated-control method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020194869A JP7523329B2 (ja) | 2020-11-25 | 2020-11-25 | 車両統合制御装置、および、車両統合制御方法 |
| JP2020-194869 | 2020-11-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022113740A1 true WO2022113740A1 (ja) | 2022-06-02 |
Family
ID=81755810
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/041337 WO2022113740A1 (ja) | 2020-11-25 | 2021-11-10 | 車両統合制御装置、および、車両統合制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230415775A1 (ja) |
| EP (1) | EP4253180A1 (ja) |
| JP (1) | JP7523329B2 (ja) |
| CN (1) | CN116507539A (ja) |
| WO (1) | WO2022113740A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024084961A1 (ja) * | 2022-10-20 | 2024-04-25 | ソフトバンクグループ株式会社 | 情報処理装置、情報処理システム、及びプログラム |
| CN117786955A (zh) * | 2023-12-05 | 2024-03-29 | 中铁大桥局集团有限公司 | 一种评价大跨桥梁涡振司乘感受性的方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07215036A (ja) * | 1993-12-06 | 1995-08-15 | Unisia Jecs Corp | 車両の入力加速度演算装置 |
| WO2017145555A1 (ja) * | 2016-02-26 | 2017-08-31 | 日立オートモティブシステムズ株式会社 | 走行制御装置及び走行制御システム |
| JP2019182104A (ja) * | 2018-04-05 | 2019-10-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2019196154A (ja) * | 2018-05-11 | 2019-11-14 | トヨタ自動車株式会社 | 車両制御システム |
| JP2020042641A (ja) * | 2018-09-12 | 2020-03-19 | 学校法人立命館 | 評価装置、制御装置、操作主体感向上システム、評価方法、及びコンピュータプログラム |
| JP2020109414A (ja) * | 2016-08-19 | 2020-07-16 | ウェイモ エルエルシー | 乗客の安楽のために経路および運転スタイルを判定し、動的に更新する方法およびシステム |
| WO2020170640A1 (ja) * | 2019-02-18 | 2020-08-27 | 三菱電機株式会社 | 乗り物酔い推定装置、乗り物酔い抑制装置及び乗り物酔い推定方法 |
| JP2020142761A (ja) * | 2019-03-08 | 2020-09-10 | マツダ株式会社 | 車両用演算システム |
-
2020
- 2020-11-25 JP JP2020194869A patent/JP7523329B2/ja active Active
-
2021
- 2021-11-10 US US18/037,658 patent/US20230415775A1/en active Pending
- 2021-11-10 CN CN202180078737.3A patent/CN116507539A/zh active Pending
- 2021-11-10 EP EP21897714.8A patent/EP4253180A1/en active Pending
- 2021-11-10 WO PCT/JP2021/041337 patent/WO2022113740A1/ja active Application Filing
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07215036A (ja) * | 1993-12-06 | 1995-08-15 | Unisia Jecs Corp | 車両の入力加速度演算装置 |
| WO2017145555A1 (ja) * | 2016-02-26 | 2017-08-31 | 日立オートモティブシステムズ株式会社 | 走行制御装置及び走行制御システム |
| JP2020109414A (ja) * | 2016-08-19 | 2020-07-16 | ウェイモ エルエルシー | 乗客の安楽のために経路および運転スタイルを判定し、動的に更新する方法およびシステム |
| JP2019182104A (ja) * | 2018-04-05 | 2019-10-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2019196154A (ja) * | 2018-05-11 | 2019-11-14 | トヨタ自動車株式会社 | 車両制御システム |
| JP2020042641A (ja) * | 2018-09-12 | 2020-03-19 | 学校法人立命館 | 評価装置、制御装置、操作主体感向上システム、評価方法、及びコンピュータプログラム |
| WO2020170640A1 (ja) * | 2019-02-18 | 2020-08-27 | 三菱電機株式会社 | 乗り物酔い推定装置、乗り物酔い抑制装置及び乗り物酔い推定方法 |
| JP2020142761A (ja) * | 2019-03-08 | 2020-09-10 | マツダ株式会社 | 車両用演算システム |
Non-Patent Citations (1)
| Title |
|---|
| TAKAHIRO WADASATOSHI FUJISAWAKATSUYA IMAIZUMINORIYOSHI UECHITOSHIKAZU DOI: "Analysis of Concussion Disease-suppressing Effect of Driver's Head Movement", JOURNAL OF SOCIETY OF AUTOMOTIVE ENGINEERS, vol. 41, no. 5, 2010, pages 999 - 1004 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022083518A (ja) | 2022-06-06 |
| JP7523329B2 (ja) | 2024-07-26 |
| EP4253180A1 (en) | 2023-10-04 |
| CN116507539A (zh) | 2023-07-28 |
| US20230415775A1 (en) | 2023-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2421354C2 (ru) | Приводное устройство транспортного средства | |
| US7702442B2 (en) | Control device for vehicle | |
| JP4918149B2 (ja) | 車両の運動制御装置 | |
| JP4370605B2 (ja) | 車両の制御装置 | |
| JP4226060B2 (ja) | 車両の制御装置 | |
| KR102353534B1 (ko) | 차량 및 차량 조향 방법 | |
| JP5540894B2 (ja) | 車両の制振制御装置 | |
| WO2012043683A1 (ja) | 車両の運動制御装置 | |
| WO2022113740A1 (ja) | 車両統合制御装置、および、車両統合制御方法 | |
| JP2008290720A (ja) | 車両の制御装置 | |
| JP4519439B2 (ja) | 車両挙動検出装置、及び車両挙動検出装置を用いた車両挙動制御装置 | |
| US20170106755A1 (en) | Vehicle control apparatus | |
| JP2019155970A (ja) | 車両の制御装置及び車両の制御方法 | |
| JP5351814B2 (ja) | 車両の運動制御装置 | |
| EP4349678A1 (en) | Vehicle integrated control device and vehicle integrated control method | |
| CN114834440B (zh) | 车辆控制系统 | |
| WO2019077973A1 (ja) | 車両のブレーキシステム | |
| JP5053139B2 (ja) | 車両挙動制御装置 | |
| CN115107713A (zh) | 车辆控制系统 | |
| CN112078586B (zh) | 车辆驱动系统 | |
| US20230173926A1 (en) | Vehicle control method and vehicle | |
| JP7460513B2 (ja) | 車両運動制御装置、および、車両運動制御方法 | |
| CN114312752B (zh) | 一种电动汽车转向车速控制方法 | |
| JP4923978B2 (ja) | 車両用操舵角制御装置 | |
| JP2018047760A (ja) | 車両姿勢制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21897714 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18037658 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180078737.3 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021897714 Country of ref document: EP Effective date: 20230626 |