WO2022004485A1 - 工具交換装置と工作機械 - Google Patents
工具交換装置と工作機械 Download PDFInfo
- Publication number
- WO2022004485A1 WO2022004485A1 PCT/JP2021/023565 JP2021023565W WO2022004485A1 WO 2022004485 A1 WO2022004485 A1 WO 2022004485A1 JP 2021023565 W JP2021023565 W JP 2021023565W WO 2022004485 A1 WO2022004485 A1 WO 2022004485A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magazine
- tool
- arm
- center
- support
- Prior art date
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q3/00—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine
- B23Q3/155—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling
- B23Q3/157—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling of rotary tools
- B23Q3/15713—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling of rotary tools a transfer device taking a single tool from a storage device and inserting it in a spindle
- B23Q3/1572—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling of rotary tools a transfer device taking a single tool from a storage device and inserting it in a spindle the storage device comprising rotating or circulating storing means
- B23Q3/15722—Rotary discs or drums
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q3/00—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine
- B23Q3/155—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling
- B23Q3/1552—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling parts of devices for automatically inserting or removing tools
- B23Q3/15526—Storage devices; Drive mechanisms therefor
- B23Q3/15534—Magazines mounted on the spindle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q3/00—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine
- B23Q3/155—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling
- B23Q3/1552—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling parts of devices for automatically inserting or removing tools
- B23Q3/15526—Storage devices; Drive mechanisms therefor
- B23Q3/15539—Plural magazines, e.g. involving tool transfer from one magazine to another
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q3/00—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine
- B23Q3/155—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling
- B23Q3/1552—Arrangements for automatic insertion or removal of tools, e.g. combined with manual handling parts of devices for automatically inserting or removing tools
- B23Q3/1554—Transfer mechanisms, e.g. tool gripping arms; Drive mechanisms therefore
- B23Q2003/155414—Transfer mechanisms, e.g. tool gripping arms; Drive mechanisms therefore the transfer mechanism comprising two or more grippers
Definitions
- This technology relates to tool changers and machine tools with tool magazines.
- Vibration may occur when passing tools between the main magazine and the sub magazine.
- the vibration propagates to the spindle of the machine tool, the work holding portion, and the like.
- the machine tool vibrates during machining, which causes a problem that the machining accuracy of the workpiece is lowered.
- the present disclosure aims to provide a tool changer and a machine tool that have a plurality of magazines for storing tools and suppress the generation of vibration.
- the present invention is a tool changing device for exchanging tools between a first magazine and a second magazine for storing tools, in which the center of gravity of the second magazine is below the tool exchange positions of the first magazine and the second magazine. To place.
- the second magazine is stable and the generation of vibration in the second magazine can be suppressed.
- the first magazine of the present invention stores the tools to be mounted on the spindle of the machine tool, and the second magazine stores the tools stored in the first magazine.
- the tool changer of the present invention can store more tools than one magazine by providing two magazines.
- the second magazine of the tool changer of the present invention rotates around an axis inclined with respect to a horizontal plane.
- the center of gravity of the second magazine is lowered because the second magazine is tilted with respect to the horizontal plane.
- the second magazine of the tool changer of the present invention includes a support disk and an arm provided on the peripheral edge of the support disk to hold a tool, and one end of the arm is outside the radial direction of the support disk from the peripheral edge. Protruding in the direction, the other end of the arm is arranged at a position not opposed to the center of the support disk.
- the arm of the tool changer is arranged so as to intersect the line extending in the radial direction passing through the center of the support disk. Therefore, the center of gravity of the second magazine of the tool changer is lowered.
- the arm of the tool changer of the present invention includes a support plate fixed to the second magazine and two support rods rotating on both sides of the support plate, one of which is the center of rotation of the second magazine.
- the first portion extending in a direction orthogonal to the axis, the first inclined portion extending in one direction parallel to the axis of the center of rotation from one end of the first portion, and the other end portion of the first portion on the same side as one direction. It has a first grip that is provided and grips the tool, and the other support rod has a second portion that extends in a direction perpendicular to the axis of the center of rotation and a shaft of the center of rotation from one end of the second portion.
- It has a second inclined portion that extends in the other direction parallel to the other direction, and a second grip portion that is fixed to the same side as the other direction at the other end of the second portion and grips the tool, and has a center of rotation. In the axial direction, the first grip and the second grip are in the same position.
- the direction in which the first inclined portion and the second inclined portion extend is opposite, and the fixed positions of the first grip portion and the second grip portion are opposite, so that the first grip portion and the second grip portion are opposite.
- the fixed position of the part is the same position.
- For the tool changer prepare two identical support rods and arrange them in opposite directions. Therefore, since the support rods on both sides are the same part, it is easy to manage.
- the second magazine of the tool changer of the present invention includes a moving mechanism that moves in the radial direction and a pot that is provided in the moving mechanism and holds the tool.
- the pot grips the tool, and the moving mechanism transports the tool gripped by the pot between the first magazine and the second magazine. Since the pot moves in the radial direction, the design of the moving mechanism is easy.
- the moving mechanism of the tool changer of the present invention is located above the center of the second magazine.
- the machine tool of the present invention is provided with the above-mentioned tool changer.
- the machine tool places the center of gravity of the second magazine below the tool exchange position of the first magazine and the second magazine. Therefore, the machine tool can suppress the generation of vibration.
- the center of gravity of the second magazine is arranged below the tool change positions of the first magazine and the second magazine, so that the second magazine is stable and vibrations in the second magazine. Can be suppressed.
- FIG. 6 is a schematic cross-sectional view taken along the line VV shown in FIG. 4 as a cutting line.
- Rear perspective view near the second magazine Schematic perspective view of the arm viewed from the upper left direction. Schematic perspective view of the arm viewed from the upper right. Schematic front view of the arm. Top view of the arm. Schematic left side view of the arm. Schematic bottom view of the arm. Enlarged perspective view of a schematic portion of the configuration near the arm. Schematic front view of the arm gripping the tool.
- FIG. 1 Schematic rear view of the arm gripping the tool.
- the second showing the relationship between the vertical distance between the installation surface of the machine tool and the center of gravity of the second magazine and the vertical distance between the installation surface and the tool exchange position when the other end of the arm is not opposed to the center.
- Right side view of the magazine The second magazine showing the relationship between the distance between the installation surface of the machine tool and the center of gravity of the second magazine and the distance between the installation surface and the tool change position when the other end of the arm faces the central axis. Reference right side view.
- L indicates a horizontal plane
- L1 indicates a central axis of the second magazine 8.
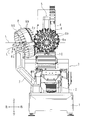
- the machine tool includes a base 1, a work holding portion 2, an XY moving mechanism 3, a vertical column 4, a Z moving mechanism 5, a first magazine 6, a support portion 7, a second magazine 8, a tool transfer device (not shown), and a spindle head. It is equipped with 10 mag.
- the first magazine 6, the support portion 7, the second magazine 8, and the tool transfer device constitute a tool changer.
- Base 1 forms a rectangular shape in a plan view and extends in the front-back direction.
- a work holding portion 2 is provided on the upper front side of the base 1.
- an XY moving mechanism 3 that can move in the left-right direction (X direction) and the front-back direction (Y direction) is provided on the rear side of the work holding portion 2.
- a vertical pillar 4 is provided on the upper side of the XY movement mechanism 3.
- a Z moving mechanism 5 that can move in the vertical direction (Z direction) is provided on the front surface of the vertical column 4.
- the spindle head 10 is provided in the Z moving mechanism 5.
- the spindle head 10 includes a spindle extending up and down. A tool is attached to the lower end of the spindle.
- the first magazine 6 is provided on the front side of the spindle head 10.
- the first magazine 6 is connected to the vertical column 4 via a connecting member.
- the first magazine 6 includes a disk 6a and an arm 6b.
- a motor (not shown) is connected to the disk 6a, and the disk 6a rotates around its central axis by driving the motor.
- a plurality of arms 6b are radially provided on the peripheral edge of the disk 6a. The arm 6b holds the tool.
- the first magazine 6 is arranged so that the central axis of the disk 6a extends in the front-rear direction and the disk 6a is in a forward leaning posture.
- the lower end position of the first magazine 6 is the tool change position.
- the arm 6b holding the tool is arranged at the tool replacement position, and the Z moving mechanism 5 is moved downward.
- the spindle is equipped with a tool gripped by the arm 6b.
- an empty arm 6b is placed at the tool replacement position, and the Z moving mechanism 5 is moved upward. Based on the upward movement of the Z moving mechanism 5, the arm 6b grips the tool of the spindle, and the tool is removed from the spindle.
- the tool attached to the spindle processes the work held in the work holding part 2.
- the XY moving mechanism 3 adjusts the front-back and left-right positions of the tool (spindle) with respect to the work, and the Z-moving mechanism 5 adjusts the vertical position of the tool.
- the support portion 7 is provided on the rear side of the left portion of the base 1.
- the support portion 7 extends upward, and the second magazine 8 is provided at the tip portion thereof.
- the second magazine 8 is arranged on the left side and the rear side of the first magazine 6.
- the second magazine 8 includes a tool transfer device. The tool transfer device transfers tools between the arm 6b of the first magazine 6 and the arm 8b of the second magazine 8.
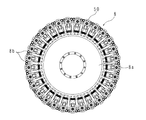
- FIG. 2 is a view viewed from the axial direction of the support disk 8a.
- the second magazine 8 includes a support disk 8a and an arm 8b.
- a motor (not shown) is connected to the support disk 8a, and the support disk 8a is rotated around the central axis L1 (see FIG. 1) by driving the motor.
- the central axis L1 of the support disk 8a is the axis of the center of rotation, which is a virtual axis.
- one side of the support disk 8a faces diagonally rearward to the right, the other side faces diagonally forward to the left, and the central axis L1 intersects the horizontal plane L.
- the central axis L1 extends diagonally forward to the left and diagonally backward to the right.
- the front side of the central axis L1 is located below the horizontal plane L, and the rear side of the central axis L1 is located above the horizontal plane L.
- the central axis L1 and the horizontal plane L form a predetermined angle ⁇ .
- the arm 6b of the first magazine 6 and the arm 8b of the second magazine 8 are closest to each other at a position lower than the horizontal plane L.
- the closest position is the magazine tool exchange position P for exchanging the tool of the first magazine 6 and the tool of the second magazine 8.
- the arm 6b of the first magazine 6 arranged at the magazine tool replacement position P will be referred to as a replacement position arm 6c
- the arm 8b of the second magazine 8 will be referred to as a replacement position arm 8c.
- the machine tool exchanges tools between the exchange position arm 6c and the exchange position arm 8c.
- the center of gravity 8g of the second magazine 8 is arranged below the horizontal plane L, that is, below the magazine tool replacement position P.
- the center of gravity 8 g of the second magazine 8 is arranged below the magazine tool exchange position P of the first magazine 6 and the second magazine 8, the second magazine 8 is stable and vibration is generated in the second magazine 8. Can be suppressed.
- FIG. 3 is a schematic reference front view of a conventional machine tool.
- La in FIG. 3 indicates the vertical position of the magazine tool replacement position Pa.
- the central axis L4 of the second magazine 8A is parallel to the horizontal plane L.
- the center of gravity 8G of the second magazine 8A is located above the magazine tool replacement position Pa. Since the machine tool of FIG. 3 has a center of gravity higher than that of the machine tool of FIG. 1, the second magazine 8A tends to be unstable, and it is difficult to suppress the vibration in the second magazine 8A.
- the second magazine 8 Since the center of gravity 8g of the second magazine 8 in FIG. 1 is arranged below the magazine tool replacement position P, the second magazine 8 is stable, and the machine tool can suppress the generation of vibration in the second magazine 8.
- the second magazine 8 may be provided on the right side of the first magazine 6.
- the cutting line in FIG. 5 is orthogonal to the central axis of the support disk 81.
- the first magazine 6 includes a cover 6d.
- the cover 6d covers the outside of each arm 6b.
- the cover 6d is rotatable and rotates together with the arm 6b when the tool is exchanged with the spindle, and does not interfere with the tool exchange.
- the mounting member 70 is fixed to the upper end portion of the support portion 7.
- the mounting member 70 includes a front plate portion 70a, a rear plate portion 70b, and a support cylinder 70c.
- the front plate portion 70a and the rear plate portion 70b extend in the upper right direction from the upper end portion of the support portion 7 and are arranged in the front-rear direction.
- the support cylinder 70c is connected to the upper end portions of the front plate portion 70a and the rear plate portion 70b with the left-right direction as the axial direction.
- the reduction gear device 71 Connect the reduction gear device 71 to the right part of the support cylinder 70c.
- the reduction gear device 71 has an annular inner peripheral portion 72 and an outer peripheral portion 73.
- the inner peripheral portion 72 is fixed to the peripheral portion of the support cylinder 70c.
- the outer peripheral portion 73 is rotatably attached around the inner peripheral portion 72 around the axis. That is, the inner peripheral portion 72 rotatably supports the outer peripheral portion 73.
- the second magazine 80 includes a support disk 81, a motor 82, and an arm 83.
- the motor 82 is connected to the left portion of the support cylinder 70c.
- the support disk 81 is arranged on the right side of the reduction gear device 71 with both sides facing left and right.
- the right side of the support disk 81 faces slightly backward, and the left side faces slightly forward.
- a through hole 81b (see FIG. 5) penetrating to the left and right is provided at the center of the support disk 81.
- the support cylinder 70c and the inner peripheral portion 72 extend in the axial direction and are inserted into the through hole 81b.
- the outer peripheral portion 73 is connected to the inner peripheral portion of the through hole 81b.
- the outer peripheral portion 73 is rotated by the drive of the motor 82, and the support disk 81 is rotated around its central axis.
- a plurality of arms 83 are provided radially on the peripheral edge of the support disk 81. The arm 83 holds the tool.
- the gripping arm 6b of the first magazine 6 and the gripping arm 83 of the second magazine 80 are closest to each other at a position below the center 81a.
- the closest position is the magazine tool exchange position P for exchanging the tool of the first magazine 6 and the tool of the second magazine 80.
- the arm 6b of the first magazine 6 arranged at the magazine tool exchange position P is referred to as an exchange position arm 6c
- the gripping arm 83 of the second magazine 80 is referred to as an exchange position arm 84.
- a tool is exchanged between the exchange position arm 6c and the exchange position arm 84.
- One end portion 83f of the gripping arm 83 projects radially outward from the peripheral edge portion of the support disk 81.
- L2 shows a line passing through the central axis 81a of the support disk 81 and the center of the tool 50 gripped by the replacement position arm 84
- L3 shows a line along the longitudinal direction of the replacement position arm 84. ..
- the line L3 passes through the center of the replacement position arm 84.
- the line L2 and the line L3 intersect to form a predetermined angle ⁇ 1 (> 0). Since each arm 83 located at the magazine tool exchange position P is arranged so as to form a predetermined angle ⁇ 1, the other end portion 83 g of the arm 83 is not opposed to the central axis 81a of the support disk 81.
- a tool transfer device 9 is provided on the right side of the support disk 81.
- the tool transfer device 9 includes a motor 9a, a ball screw 9b, a nut 9c, a track 9d, a slider 9e, a pot 9f, and a connecting portion 9g.
- the motor 9a, the ball screw 9b, the nut 9c, the track 9d, the slider 9e, and the connecting portion 9g constitute a moving mechanism.
- the moving mechanism is located above the central axis 81a of the support disk 81.
- the support cylinder 70c and the inner peripheral portion 72 inserted into the through hole 81b support the ball screw 9b and the track 9d.
- the ball screw 9b is connected to the rotation shaft of the motor 9a.
- the nut 9c is connected to the ball screw 9b.
- the track 9d is arranged next to the ball screw 9b.
- the track 9d is fixed at a position deviated from the central axis 81a of the support disk 81.
- the orbit 9d extends along the longitudinal direction of the replacement position arm 84.
- One end of the track 9d faces the exchange position arm 84.
- the slider 9e is slidably provided on the track 9d.
- the pot 9f is attached to the slider 9e.
- the connecting portion 9g connects the slider 9e and the nut 9c.
- the pot 9f grabs the tool 50 gripped by the replacement position arm 84 and passes it to the empty replacement position arm 6c, or grabs the tool 50 gripped by the replacement position arm 6c and passes it to the empty replacement position arm 84.
- the center of gravity 8g of the second magazine 80 is located near the central axis 81a and is located below the center of the first magazine 6.
- the plurality of arms 83 are arranged along the peripheral edge of the support disk 81.
- the arm 83 extends in the radial direction of the support disk 81.
- the configuration of the arm 83 will be described.
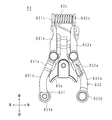
- the arm 83 includes a first support rod 831 and a second support rod 832.
- the support plate 83a, the first support rod 831 and the second support rod 832 extend in the front-rear direction.
- the front end portion of the support plate 83a has a circular arc shape in a plan view protruding to the rear side.
- the first support rod 831 and the second support rod 832 are separated from each other in the left-right direction, and are arranged on the left side and the right side of the support plate 83a, respectively.
- the front-rear midway portion of the first support rod 831 is connected to the front-rear halfway portion of the support plate 83a via a pivot axis 83d whose axial direction is the vertical direction.
- the front-rear midway portion of the second support rod 832 is connected to the front-rear halfway portion of the support plate 83a via a pivot axis 83e whose axial direction is the vertical direction.
- the front side of the first support rod 831 from the pivot 83d is referred to as a front portion 831d
- the rear side of the pivot rod 83d is referred to as a rear portion 831e
- the front side of the second support rod 832 from the pivot 83e is referred to as a front portion 832d
- the rear side of the pivot rod 83e is referred to as a rear portion 832e.
- the front portion 831d of the first support rod 831 is curved so as to project to the left side.
- the front portion 832d of the second support rod 832 is curved so as to project to the right.
- the front end portion of the arc-shaped support plate 83a is arranged between the front side portions 831d and 832d of the first support rod 831 and the second support rod 832.
- a spring seat 831c is provided at the rear end of the first support rod 831.
- a spring seat 832c is provided at the rear end of the second support rod 832.
- the two spring seats 831c and 832c form a disk shape and face each other in the left-right direction.
- a push spring 83c is provided between the two spring seats 831c and 832c. The push spring 83c urges the two spring seats 831c and 832c so that the two spring seats 831c and 832c are separated from each other in the left-right direction.
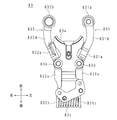
- the front side portion 831d of the first support rod 831 is located on the left side of the rear side portion 831e.
- the inclined portion 831a connects the front side portion 831d and the rear side portion 831e.
- the inclined portion 831a is inclined so as to extend downward from the rear end portion of the front side portion 831d toward the rear side.
- the roller 831b is provided on the lower surface of the front end portion of the front side portion 831d.
- the front side portion 831d constitutes the first portion
- the inclined portion 831a constitutes the first inclined portion.
- the roller 831b constitutes the first grip portion.
- the vertical direction is a direction parallel to the axial direction of the rotation center of the second magazine 80.
- the front side portion 832d of the second support rod 832 is located on the right side of the rear side portion 832e.
- An inclined portion 832a connects the front side portion 832d and the rear side portion 832e.
- the inclined portion 832a is inclined so as to extend upward from the rear end portion of the front side portion 832d toward the rear side.
- the roller 832b is provided on the upper surface of the front end portion of the front side portion 832d.
- the front side portion 832d constitutes the second portion
- the inclined portion 832a constitutes the second inclined portion
- the roller 832b constitutes the second grip portion.
- the first support rod 831 and the second support rod 832 are the same parts and are only upside down.
- the positions of the pivot axis 83d and the pivot axis 83e are the same in the direction parallel to the axial direction of the rotation center of the tool magazine 80.
- the inclined directions of the inclined portion 831a and the inclined portion 832a are opposite to each other, and the magnitudes of the inclined portions are the same.
- the lengths of the inclined portion 831a and the inclined portion 832a are the same. Therefore, the positions of the roller 831b and the roller 832b are the same in the direction parallel to the axial direction of the rotation center of the tool magazine.
- the plurality of arms 83 are arranged along the peripheral edge of the support disk 81.
- the plurality of arms 83 include a first arm 83A and a second arm 83B located next to the first arm 83A.
- the front portion 831d of the first arm 83A is located above the front portion 832d of the second arm 83B. That is, in the adjacent first arm 83A and the second arm 83B, the positions of the front side portion 831d of the first arm 83A and the front side portion 832d of the second arm 83B are displaced in the vertical direction, that is, in the axial direction of the support disk 81.
- the first arm 83A and the second arm 83B that is, the two adjacent arms 83 are at least partially in the circumferential direction of the support disk 81.
- the front side portions 831d and 832d overlap in the direction parallel to the central axis 81a, in other words, the positions of the front side portions 831d and 832d are displaced in the axial direction of the support disk 81, so that the two adjacent arms 83 interfere with each other in the circumferential direction. do not do.
- the tool 50 is mounted between the front side portions 831d and 832d of the first support rod 831 and the second support rod 832.
- the rollers 831b and 832b hold the tool 50 by the urging force of the push spring 83c.
- D indicates the vertical distance between the installation surface 100 of the machine tool and the center of gravity 8 g of the second magazine 80
- S indicates the vertical distance between the installation surface 100 and the magazine tool exchange position P.
- the line Lb indicates the vertical position of the magazine tool replacement position P.
- the center of gravity 8g of the second magazine 80 is located near the central axis 81a of the second magazine 80, and is located below the magazine tool replacement position P. That is, the exchange position arms 6c and 84 are located above the center of gravity 8g, and the distance D is shorter than the distance S.
- the line L3 passing through the center of the exchange position arm 84 is horizontal, and the exchange position arm 84 faces the exchange position arm 6c.
- FIG. 17 is a diagram corresponding to FIG. 16 when the other end of the arm 8b faces the central axis L1.
- the configuration of the second magazine 8 is the same as the configuration of the second magazine 8 of FIGS. 1 and 2.
- One end 8ba of the arm 8b projects radially outward from the peripheral edge of the support disk 8a.
- the other end 8bb of the arm 8b faces the central axis L1 of the support disk 8a. Since the position of the replacement position arm 6c and the magazine tool replacement position P are the same in FIGS. 16 and 17, the distance S is also the same.
- the center of gravity 8g of the second magazine 8 is located near the central axis L1 of the second magazine 8 and is below the magazine tool replacement position P.
- the line L3 passing through the center of the exchange position arm 8c is slanted, and the exchange position arm 8c does not face the exchange position arm 6c. Therefore, when the tool is exchanged between the exchange position arms 8c and 6c, problems such as incomplete gripping of the tool or dropping of the tool may occur.
- the replacement position arm 84 has a replacement position arm 84 as compared with the case where the other end portion 8bb faces the central shaft L1.
- the distance between the installation surface 100 and the center of gravity 8g can be shortened while facing the exchange position arm 6c. That is, the smooth execution of tool change can be realized, and the center of gravity 8 g of the second magazine 80 can be lowered.
- the pot 9f grips the tool 50, and the moving mechanism conveys the tool 50 gripped by the pot 9f between the first magazine 6 and the second magazine 80. Since the moving mechanism changes tools on the upper side of the center of the second magazine 80, it is easy to lower the position of the second magazine 80.
- the central axis (axis of the center of rotation) L1 of the first magazine 6 may be inclined with respect to the horizontal plane, or may be parallel to the horizontal plane.
- the illustration of the tool transfer device is omitted in the first embodiment, it has the same configuration as the tool transfer device of the first embodiment and the tool transfer device 9 of the second embodiment.
- Tool transfer device 9a Motor (movement mechanism) 9b ball screw (movement mechanism) 9c nut (movement mechanism) 9d orbit (movement mechanism) 9e slider (movement mechanism) 9f pot 9g connecting part (moving mechanism) P, Pa Magazine tool replacement position
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automatic Tool Replacement In Machine Tools (AREA)
Abstract
工具を収納する複数のマガジンを有し、振動の発生を抑制することができる工具交換装置及び工作機械を提供する。 工具交換装置は、工具を収納する第一マガジンと第二マガジンの間で工具を交換する工具交換装置において、前記第一マガジンと第二マガジンの工具交換位置よりも下側に前記第二マガジンの重心を配置する。好ましくは、前記第二マガジンは水平面に対して傾斜する。
Description
本技術は工具マガジンを有する工具交換装置と工作機械に関する。
従来、工具を収納する主マガジンと副マガジンを備える工作機械がある。工作機械は主マガジンと副マガジンの間で工具の受け渡しを行う。(特許文献1参照)。
主マガジンと副マガジン間で工具を受け渡す時、振動が発生することがある。該振動は工作機械の主軸とワーク保持部等に伝搬する。工作機械は加工中に振動することによって、ワークの加工精度が低下するという問題がある。
本開示は、工具を収納する複数のマガジンを有し、振動の発生を抑制する工具交換装置と工作機械を提供することを目的とする。
本発明は、工具を収納する第一マガジンと第二マガジンの間で工具を交換する工具交換装置において、前記第一マガジンと第二マガジンの工具交換位置よりも下側に前記第二マガジンの重心を配置する。
本発明の工具交換装置は、第二マガジンが安定し、第二マガジンでの振動の発生を抑制できる。
本発明の第一マガジンは工作機械の主軸に装着する工具を収納し、第二マガジンは第一マガジンが収納する工具を収納する。
本発明の工具交換装置は二つのマガジンを設けることで、一つのマガジンよりも多くの工具を収納できる。
本発明の工具交換装置の第二マガジンは水平面に対して傾斜した軸周りに回転する。
工具交換装置は第二マガジンが水平面に対して傾斜することで、第二マガジンの重心が低くなる。
本発明の工具交換装置の第二マガジンは、支持円盤と、該支持円盤の周縁部に設けてあり、工具を把持するアームとを備え、アームの一端部は周縁部から支持円盤の径方向外向きに突出し、アームの他端部は支持円盤の中心に非対向となる位置に配置する。
工具交換装置のアームは支持円盤の中心を通る径方向に延びた線に対して、交差するように配置する。故に工具交換装置は第二マガジンの重心が低くなる。
本発明の工具交換装置のアームは、第二マガジンに固定する支持板と、該支持板の両側にて回転する二つの支持桿とを備え、一方の支持桿は、第二マガジンの回転中心の軸に直交する方向に延びる第一部分と、該第一部分の一端部から回転中心の軸に平行な一方向に向けて延びる第一傾斜部と、第一部分の他端部における一方向と同じ側に設けてあり、工具を把持する第一把持部とを有し、他方の支持桿は、回転中心の軸に直交する方向に延びる第二部分と、該第二部分の一端部から回転中心の軸に平行な他方向に向けて延びる第二傾斜部と、第二部分の他端部における他方向と同じ側に固定してあり、工具を把持する第二把持部とを有し、回転中心の軸方向にて、第一把持部と第二把持部は同じ位置にある。
回転中心の軸方向において、第一傾斜部と第二傾斜部が延びる方向が反対であり、第一把持部と第二把持部の固定位置が反対であるので、第一把持部と第二把持部の固定位置は同じ位置になる。工具交換装置は同一の支持桿を二つ準備し、反対向きに配置させる。故に両側の支持桿は同一部品であるので管理が容易である。
本発明の工具交換装置の第二マガジンは、径方向に移動する移動機構と、該移動機構に設けてあり且つ工具を把持するポットとを備える。
ポットは工具を把持し、移動機構は、ポットが把持した工具を第一マガジンと第二マガジン間で搬送する。ポットが径方向に移動するので、移動機構の設計が容易である。
本発明の工具交換装置の移動機構は前記第二マガジンの中心の上側に位置する。
移動機構は第二マガジンの中心の上側にて工具を交換するので、第二マガジンの位置を低くし易い。
本発明の工作機械は上述の工具交換装置を備える。
工作機械は第一マガジンと第二マガジンの工具交換位置よりも下側に第二マガジンの重心を配置する。故に工作機械は振動の発生を抑制できる。
本発明の工具交換装置と工作機械は、第一マガジンと第二マガジンの工具交換位置よりも下側に第二マガジンの重心を配置するので、第二マガジンは安定し、第二マガジンでの振動の発生を抑制できる。
以下本発明の工作機械について図面に基づいて説明する。以下の説明では、図に示す上下前後左右を使用する。図1において、Lは水平面を示し、L1は、第二マガジン8の中心軸を示す。
工作機械は、基台1、ワーク保持部2、XY移動機構3、立柱4、Z移動機構5、第一マガジン6、支持部7、第二マガジン8、工具搬送装置(図示略)、主軸ヘッド10等を備える。第一マガジン6、支持部7、第二マガジン8及び工具搬送装置は工具交換装置を構成する。
基台1は平面視矩形をなし、前後方向に延びる。基台1の上部前側に、ワーク保持部2が設けてある。基台1の上部にて、ワーク保持部2の後側に左右方向(X方向)及び前後方向(Y方向)に移動可能なXY移動機構3を設ける。
XY移動機構3の上側に立柱4が設けてある。立柱4の前面に上下方向(Z方向)に移動可能なZ移動機構5が設けてある。Z移動機構5に主軸ヘッド10を設ける。主軸ヘッド10は上下に延びる主軸を備える。主軸の下端部は工具を装着する。
主軸ヘッド10の前側に、第一マガジン6設ける。第一マガジン6は立柱4に連結部材を介して連結する。第一マガジン6は、円盤6aとアーム6bを備える。円盤6aにモータ(図示略)を連結し、円盤6aはモータの駆動によって、その中心軸回りに回転する。円盤6aの周縁部に、複数のアーム6bを放射状に設ける。アーム6bは工具を保持する。
円盤6aの中心軸が前後方向に延び且つ円盤6aが前傾姿勢となるように、第一マガジン6を配置する。第一マガジン6の下端位置は工具交換位置である。主軸に工具を装着する場合、工具交換位置に工具を把持したアーム6bを配置し、Z移動機構5を下方に移動する。Z移動機構5の下方移動に基づき、主軸はアーム6bが把持する工具を装着する。主軸から工具を取り外す場合、工具交換位置に空のアーム6bを配置し、Z移動機構5を上方に移動する。Z移動機構5の上方移動に基づき、アーム6bは主軸の工具を把持し、工具は主軸から抜ける。
主軸に装着した工具は、ワーク保持部2に保持したワークを加工する。XY移動機構3はワークに対する工具(主軸)の前後左右位置を調整し、Z移動機構5は工具の上下位置を調整する。
支持部7は基台1の左部後側に設ける。支持部7は上側に延び、その先端部に第二マガジン8は設ける。第二マガジン8は第一マガジン6の左側且つ後側に配置する。第二マガジン8は工具搬送装置を備える。工具搬送装置は、第一マガジン6のアーム6bと第二マガジン8のアーム8bとの間で、工具の受け渡しを行う。
図2は支持円盤8aの軸方向から視認した図である。第二マガジン8は支持円盤8aとアーム8bを備える。支持円盤8aは、モータ(図示略)が連結し、モータの駆動によって、中心軸L1(図1参照)回りに回転する。支持円盤8aの中心軸L1は回転中心の軸であり、仮想的な軸である。
図1の如く、支持円盤8a(図2参照)の一面が右斜め後を向き、他面が左斜め前を向き、中心軸L1が水平面Lに交差する。平面視にて、中心軸L1は左斜め前方向と右斜め後方向に延びる。中心軸L1の前側は水平面Lよりも下側に位置し、中心軸L1の後側は水平面Lよりも上側に位置する。中心軸L1と水平面Lは所定角度θを形成する。
第一マガジン6の中心軸を通る水平面Lを設定した場合、第一マガジン6のアーム6bと、第二マガジン8のアーム8bとは、水平面Lよりも下側の位置にて最も接近する。該最も接近した位置が第一マガジン6の工具と第二マガジン8の工具を交換するマガジン工具交換位置Pとなる。以下、マガジン工具交換位置Pに配した第一マガジン6のアーム6bを交換位置アーム6cと称し、第二マガジン8のアーム8bを交換位置アーム8cと称する。工作機械は交換位置アーム6cと交換位置アーム8cの間で工具交換を行う。
第二マガジン8の重心8gは水平面Lよりも下側、即ちマガジン工具交換位置Pよりも下側に配置する。
第一マガジン6と第二マガジン8のマガジン工具交換位置Pよりも下側に、第二マガジン8の重心8gを配置するので、第二マガジン8は安定し、第二マガジン8での振動の発生を抑制できる。
図3は従来の工作機械の略示参考正面図である。図3のLaはマガジン工具交換位置Paの上下位置を示す。第二マガジン8Aの中心軸L4は水平面Lと平行である。中心軸L4と水平面Lとが平行である場合、第二マガジン8Aの重心8Gは、マガジン工具交換位置Paよりも上側に位置する。図3の工作機械は図1の工作機械に比べて重心位置が上にあるので、第二マガジン8Aは不安定になり易く、第二マガジン8Aでの振動を抑制し難い。
図1の第二マガジン8の重心8gはマガジン工具交換位置Pよりも下側に配置するので第二マガジン8は安定し、工作機械は第二マガジン8での振動の発生を抑制できる。第二マガジン8は第一マガジン6の右側に設けてもよい。
以下本発明の他の例を図面に基づいて説明する。前述の例と同様な構成には同じ符号を付し、その詳細な説明を省略する。
以下本発明の他の例を図面に基づいて説明する。前述の例と同様な構成には同じ符号を付し、その詳細な説明を省略する。
図5の切断線は支持円盤81の中心軸に直交する。第一マガジン6はカバー6dを備える。カバー6dは各アーム6bの外側を覆う。カバー6dは回転可能であり、主軸との工具交換時にアーム6bと共に回転し、工具交換を妨げない。
図6の如く、支持部7の上端部に取付部材70を固定する。取付部材70は、前板部70a、後板部70b及び支持筒70cを備える。前板部70aと後板部70bは支持部7の上端部から右上方向に延び、且つ前後に並ぶ。支持筒70cは左右方向を軸方向とし、前板部70a及び後板部70bの上端部に連結する。
支持筒70cの右部に減速ギア装置71を連結する。減速ギア装置71は、環状の内周部72及び外周部73を有する。内周部72は支持筒70cの周縁部に固定する。外周部73は内周部72の周囲に、軸回りに回転可能に取り付ける。即ち内周部72は外周部73を回転可能に支持する。
第二マガジン80は、支持円盤81、モータ82及びアーム83を備える。モータ82は支持筒70cの左部に連結する。支持円盤81は両面を左右に向けて、減速ギア装置71の右側に配置する。支持円盤81の右面は若干後側に向き、左面は若干前側を向く。支持円盤81の中央部に、左右に貫通した貫通穴81b(図5参照)を設ける。支持筒70cと内周部72は軸方向に延び、貫通穴81bに挿入する。外周部73は貫通穴81bの内周部分に連結する。モータ82の駆動によって外周部73は回転し、支持円盤81はその中心軸回りに回転する。支持円盤81の周縁部に複数のアーム83を放射状に設ける。アーム83は工具を保持する。
第一マガジン6の把持アーム6bと、第二マガジン80の把持アーム83とは、中心81aよりも下側の位置にて最も接近する。該最も接近した位置が第一マガジン6の工具と第二マガジン80の工具を交換するマガジン工具交換位置Pとなる。以下、マガジン工具交換位置Pに配した第一マガジン6のアーム6bを交換位置アーム6cと称し、第二マガジン80の把持アーム83を交換位置アーム84と称する。交換位置アーム6cと交換位置アーム84の間で工具交換を行う。把持アーム83の一端部83fは支持円盤81の周縁部から径方向外向きに突出する。
図5において、L2は、支持円盤81の中心軸81aと、交換位置アーム84が把持する工具50の中心とを通る線を示し、L3は、交換位置アーム84の長手方向に沿った線を示す。線L3は交換位置アーム84の中央を通る。線L2と線L3は交差し、所定角度θ1(>0)を形成する。マガジン工具交換位置Pに位置する各アーム83について所定角度θ1を形成するように配置するので、アーム83の他端部83gは支持円盤81の中心軸81aに非対向となる。
支持円盤81の右側に工具搬送装置9を設ける。工具搬送装置9は、モータ9a、ボール螺子9b、ナット9c、軌道9d、スライダ9e、ポット9f、連結部9gを備える。モータ9a、ボール螺子9b、ナット9c、軌道9d、スライダ9e、連結部9gは移動機構を構成する。移動機構は支持円盤81の中心軸81aの上側に位置する。貫通穴81bに挿入した支持筒70cと内周部72はボール螺子9bと軌道9dを支持する。ボール螺子9bはモータ9aの回転軸に連結する。ナット9cはボール螺子9bに連結する。
図5の如く、軌道9dはボールねじ9bの隣に配置する。軌道9dは支持円盤81の中心軸81aから外れた位置に固定する。軌道9dは交換位置アーム84の長手方向に沿って延びる。軌道9dの一端部は交換位置アーム84に臨む。スライダ9eは軌道9dに摺動可能に設ける。ポット9fはスライダ9eに取り付ける。連結部9gはスライダ9eとナット9cを連結する。モータ9aの駆動によって、ボール螺子9bが回転し、ナット9cがボール螺子9bに沿って移動し、スライダ9e、連結部9g及びポット9fが軌道9dに沿って移動する。ポット9fは、交換位置アーム84が把持する工具50を掴み、空の交換位置アーム6cに渡す、又は交換位置アーム6cが把持する工具50を掴み、空の交換位置アーム84に渡す。図5に示す如く、第二マガジン80の重心8gは中心軸81a付近にあり、第一マガジン6の中心よりも下側に位置する。
図5及び図6の如く、複数のアーム83は、支持円盤81の周縁部に沿って並ぶ。アーム83は支持円盤81の径方向に延びる。以下、アーム83の構成について説明する。
図7及び図8の如く、アーム83は、第一支持桿831と第二支持桿832を備える。支持板83a、第一支持桿831及び第二支持桿832は前後方向に延びる。支持板83aの前端部は後側に突出した平面視円弧状をなす。第一支持桿831及び第二支持桿832は左右方向に離れ、支持板83aの左側と右側に夫々配置する。
第一支持桿831の前後方向中途部は、上下方向を軸方向とした枢軸83dを介して、支持板83aの前後方向中途部に連結する。第二支持桿832の前後方向中途部は、上下方向を軸方向とした枢軸83eを介して、支持板83aの前後方向中途部に連結する。
第一支持桿831の枢軸83dよりも前側を前側部分831dと称し、枢軸83dよりも後側を後側部分831eと称す。第二支持桿832の枢軸83eよりも前側を前側部分832dと称し、枢軸83eよりも後側を後側部分832eと称す。第一支持桿831の前側部分831dは左側に突出するように湾曲する。第二支持桿832の前側部分832dは右側に突出するように湾曲する。円弧状をなす支持板83aの前端部は、第一支持桿831及び第二支持桿832の前側部分831d、832dの間に配置する。
第一支持桿831の後端部にバネ座831cを設ける。第二支持桿832の後端部にバネ座832cを設ける。二つのバネ座831c、832cは円板状をなし、左右方向に対向する。二つのバネ座831c、832cの間に押しばね83cを設ける。押しばね83cは二つのバネ座831c、832cを、二つのバネ座831c、832cが左右方向にて相互に離れるように付勢する。
第一支持桿831の前側部分831dは後側部分831eよりも左側に位置する。前側部分831dと後側部分831eを傾斜部831aが連結する。傾斜部831aは前側部分831dの後端部から後側に向かうに従って、下側に向かって延びるように傾斜する。ローラ831bは前側部分831dの前端部下面に設ける。前側部分831dは第一部分を構成し、傾斜部831aは第一傾斜部を構成する。ローラ831bは第一把持部を構成する。上下方向は第二マガジン80の回転中心の軸方向に平行な方向である。
第二支持桿832の前側部分832dは後側部分832eよりも右側に位置する。前側部分832dと後側部分832eは傾斜部832aが連結する。傾斜部832aは前側部分832dの後端部から後側に向かうに従って、上側に延びるように傾斜する。ローラ832bは前側部分832dの前端部上面に設けてる。前側部分832dは第二部分を構成し、傾斜部832aは第二傾斜部を構成し、ローラ832bは第二把持部を構成する。
第一支持桿831と第二支持桿832は同一部品であり上下が反対になっているのみである。工具マガジン80の回転中心の軸方向に平行な方向において、枢軸83dと枢軸83eの位置は同じである。傾斜部831aと傾斜部832aの傾斜方向は逆であり、傾斜角の大きさは同じである。傾斜部831aと傾斜部832aの長さは同じである。故に工具マガジンの回転中心の軸方向に平行な方向において、ローラ831bとローラ832bの位置は同じである。
図13の如く、複数のアーム83は支持円盤81の周縁部に沿って並ぶ。複数のアーム83は、第一アーム83Aと、該第一アーム83Aの隣に位置する第二アーム83Bを含む。第一アーム83Aの前側部分831dは第二アーム83Bの前側部分832dの上側に位置する。即ち隣合う第一アーム83Aと第二アーム83Bにおいて、第一アーム83Aの前側部分831d、及び第二アーム83Bの前側の部分832dの位置は、上下方向、即ち支持円盤81の軸方向にずれる。
前述したように、線L2及び線L3は交差し、所定角度θ1を形成するので、第一アーム83Aと第二アーム83B、即ち隣合う二つのアーム83は支持円盤81の周方向にて少なくとも部分的に同じ位置にある。しかし前側部分831d、832dは中心軸81aに平行な方向に重なる、換言すれば前側部分831d、832dの位置は支持円盤81の軸方向にずれるので、周方向にて隣合う二つのアーム83は干渉しない。
図14、図15の如く、工具50は第一支持桿831と第二支持桿832の前側部分831d、832dの間に装着する。ローラ831b、832bは、押しばね83cの付勢力によって、工具50を保持する。
以下、図16と図17を参照し、工作機械について説明する。Dは工作機械の設置面100と第二マガジン80の重心8gとの上下間距離を示し、Sは設置面100とマガジン工具交換位置Pとの上下間距離を示す。線Lbはマガジン工具交換位置Pの上下位置を示す。第二マガジン80の重心8gは第二マガジン80の中心軸81a付近に位置し、マガジン工具交換位置Pよりも下側に位置する。即ち交換位置アーム6c、84は重心8gよりも上側に位置し、距離Dは距離Sよりも短い。交換位置アーム84の中央を通る線L3は水平であり、交換位置アーム84は交換位置アーム6cに正対する。
図17は、アーム8bの他端部が中心軸L1に対向する場合の図16相当図である。第二マガジン8の構成は、図1及び図2の第二マガジン8の構成と同様である。アーム8bの一端部8baは支持円盤8aの周縁部から径方向外向きに突出する。アーム8bの他端部8bbは支持円盤8aの中心軸L1に対向する。交換位置アーム6cの位置とマガジン工具交換位置Pは図16も図17も同じであるため、距離Sも同じとなる。
第二マガジン8の重心8gは第二マガジン8の中心軸L1付近に位置し、マガジン工具交換位置Pよりも下側にある。この場合、交換位置アーム8cの中央を通る線L3は斜めになり、交換位置アーム8cは交換位置アーム6cに正対しない。故に交換位置アーム8c、6c間において工具を交換する場合、工具の不完全な把持又は工具の脱落等、不具合が生じることがある。交換位置アーム8cを交換位置アーム6cに正対させるには、図17の交換位置アーム8cの下隣のアームを交換位置アームとするように第二マガジン8を上方に移動させる必要がある。
他端部83gが中心軸81aに非対向となるように(図16)アーム83の向きを設定することで、他端部8bbが中心軸L1に対向する場合に比べて、交換位置アーム84は交換位置アーム6cに正対し且つ設置面100と重心8gとの間の距離を短くできる。即ち工具交換の円滑な実行を実現でき、第二マガジン80の重心8gを低くできる。
他の工具交換装置及び工作機械は、アーム83が支持円盤81の中心を通る径方向に延びた線L2とアーム83の長手方向に延びる線L3とが交差するように配置する。このような配置にすることによって、工具交換の円滑な実行を実現でき且つ第二マガジン80の重心は低くなる。
ポット9fは工具50を把持し、移動機構は、ポット9fが把持した工具50を第一マガジン6と第二マガジン80間で搬送する。移動機構は第二マガジン80の中心の上側にて工具を交換するので、第二マガジン80の位置を低くし易い。
第一マガジン6の中心軸(回転中心の軸)L1を水平面に対して傾斜してもよいし、水平面に平行でもよい。実施の形態1において工具搬送装置の図示を省略しているが、実施の形態1の工具搬送装置、実施の形態2の工具搬送装置9と同様な構成を備える。
今回開示した実施の形態は全ての点で例示であり、制限的なものではない。各実施例にて記載の技術的特徴は互いに組み合わせることができ、本発明の範囲は請求の範囲内での全ての変更及び請求の範囲と均等の範囲が含まれる。
50 工具
6 第一マガジン
8、80 第二マガジン
8a、81 支持円盤
8b、83 アーム
L1 中心軸(回転中心の軸)
9 工具搬送装置
9a モータ(移動機構)
9b ボール螺子(移動機構)
9c ナット(移動機構)
9d 軌道(移動機構)
9e スライダ(移動機構)
9f ポット
9g 連結部(移動機構)
P、Pa マガジン工具交換位置
6 第一マガジン
8、80 第二マガジン
8a、81 支持円盤
8b、83 アーム
L1 中心軸(回転中心の軸)
9 工具搬送装置
9a モータ(移動機構)
9b ボール螺子(移動機構)
9c ナット(移動機構)
9d 軌道(移動機構)
9e スライダ(移動機構)
9f ポット
9g 連結部(移動機構)
P、Pa マガジン工具交換位置
Claims (8)
- 工具を収納する第一マガジンと第二マガジンの間で工具を交換する工具交換装置において、
前記第一マガジンと第二マガジンの工具交換位置よりも下側に前記第二マガジンの重心を配置する
工具交換装置。 - 前記第一マガジンは工作機械の主軸に装着する工具を収納し、
前記第二マガジンは前記第一マガジンが収納する工具を収納する
請求項1に記載の工具交換装置。 - 前記第二マガジンは水平面に対して傾斜した軸周りに回転する
請求項2に記載の工具交換装置。 - 前記第二マガジンは、
支持円盤と、
該支持円盤の周縁部に設けてあり、工具を把持するアームと
を備え、
前記アームの一端部は前記周縁部から前記支持円盤の径方向外向きに突出し、
前記アームの他端部は前記支持円盤の中心に非対向となる位置に配置する
請求項1から3のいずれか一つに記載の工具交換装置。 - 前記アームは、
前記第二マガジンに固定する支持板と、
該支持板の両側にて回転する二つの支持桿と
を備え、
一方の前記支持桿は、
前記第二マガジンの回転中心の軸に直交する方向に延びる第一部分と、
該第一部分の一端部から前記回転中心の軸に平行な一方向に向けて延びる第一傾斜部と、
前記第一部分の他端部における前記一方向と同じ側に設けてあり、工具を把持する第一把持部と
を有し、
他方の前記支持桿は、
前記回転中心の軸に直交する方向に延びる第二部分と、
該第二部分の一端部から前記回転中心の軸に平行な他方向に向けて延びる第二傾斜部と、
前記第二部分の他端部における前記他方向と同じ側に固定してあり、工具を把持する第二把持部と
を有し、
前記回転中心の軸方向にて、前記第一把持部及び第二把持部は同じ位置にある
請求項4に記載の工具交換装置。 - 前記第二マガジンは、
径方向に移動する移動機構と、
該移動機構に設けてあり、工具を把持するポットと
を備える
請求項1から5のいずれか一つに記載の工具交換装置。 - 前記移動機構は前記第二マガジンの中心の上側に位置する
請求項6に記載の工具交換装置。 - 請求項1から7のいずれか一つに記載の工具交換装置
を備える工作機械。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180044751.1A CN115720539A (zh) | 2020-06-30 | 2021-06-22 | 换刀装置和机床 |
| DE112021001993.7T DE112021001993T5 (de) | 2020-06-30 | 2021-06-22 | Werkzeugwechsler und werkzeugmaschine |
| JP2022533889A JP7552693B2 (ja) | 2020-06-30 | 2021-06-22 | 工具交換装置と工作機械 |
| US18/058,098 US20230082204A1 (en) | 2020-06-30 | 2022-11-22 | Tool changer and machine tool |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020113511 | 2020-06-30 | ||
| JP2020-113511 | 2020-06-30 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/058,098 Continuation US20230082204A1 (en) | 2020-06-30 | 2022-11-22 | Tool changer and machine tool |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022004485A1 true WO2022004485A1 (ja) | 2022-01-06 |
Family
ID=79316141
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/023565 WO2022004485A1 (ja) | 2020-06-30 | 2021-06-22 | 工具交換装置と工作機械 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230082204A1 (ja) |
| JP (1) | JP7552693B2 (ja) |
| CN (1) | CN115720539A (ja) |
| DE (1) | DE112021001993T5 (ja) |
| WO (1) | WO2022004485A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6186150A (ja) * | 1984-10-01 | 1986-05-01 | Yamazaki Mazak Corp | 数値制御工作機械における工具交換方法 |
| JPH02172649A (ja) * | 1988-12-24 | 1990-07-04 | Toshiba Corp | 工具入替え装置 |
| DE19860709A1 (de) * | 1998-12-23 | 2001-02-22 | Hektor Steinhilber | Werkzeugmagazin und Werkzeugwechselverfahren an Bearbeitungszentren |
| DE102008059089A1 (de) * | 2008-11-26 | 2010-05-27 | Gebr. Saacke Gmbh & Co. Kg | Werkzeugmaschine |
| JP2011011262A (ja) * | 2009-06-30 | 2011-01-20 | Aisin Aw Co Ltd | マシニングセンタのツール交換機構及び方法並びに外部マガジン |
| CN205703431U (zh) * | 2016-04-13 | 2016-11-23 | 中山市赛佳数控机械有限公司 | 一种带伺服刀库的雕刻机床 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11254260A (ja) | 1998-03-04 | 1999-09-21 | Mori Seiki Co Ltd | 工作機械の工具交換装置 |
| JP2001018136A (ja) | 1999-07-08 | 2001-01-23 | Sugino Mach Ltd | 自動工具交換型工作機械 |
| KR101520967B1 (ko) | 2008-11-14 | 2015-05-15 | 두산인프라코어 주식회사 | 양방향 굴절방식의 툴 그리퍼 체인 |
| JP4827912B2 (ja) | 2008-12-04 | 2011-11-30 | 本田技研工業株式会社 | 工作機械システム |
| DE102014110926A1 (de) | 2013-08-01 | 2015-02-05 | Grob-Werke Gmbh & Co. Kg | Bearbeitungsmaschine |
| DE102013021674A1 (de) | 2013-12-18 | 2015-06-18 | Astrium Gmbh | Vorrichtung zum Bearbeiten einer Struktur sowie Raumflugkörper |
-
2021
- 2021-06-22 DE DE112021001993.7T patent/DE112021001993T5/de active Pending
- 2021-06-22 JP JP2022533889A patent/JP7552693B2/ja active Active
- 2021-06-22 WO PCT/JP2021/023565 patent/WO2022004485A1/ja active Application Filing
- 2021-06-22 CN CN202180044751.1A patent/CN115720539A/zh active Pending
-
2022
- 2022-11-22 US US18/058,098 patent/US20230082204A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6186150A (ja) * | 1984-10-01 | 1986-05-01 | Yamazaki Mazak Corp | 数値制御工作機械における工具交換方法 |
| JPH02172649A (ja) * | 1988-12-24 | 1990-07-04 | Toshiba Corp | 工具入替え装置 |
| DE19860709A1 (de) * | 1998-12-23 | 2001-02-22 | Hektor Steinhilber | Werkzeugmagazin und Werkzeugwechselverfahren an Bearbeitungszentren |
| DE102008059089A1 (de) * | 2008-11-26 | 2010-05-27 | Gebr. Saacke Gmbh & Co. Kg | Werkzeugmaschine |
| JP2011011262A (ja) * | 2009-06-30 | 2011-01-20 | Aisin Aw Co Ltd | マシニングセンタのツール交換機構及び方法並びに外部マガジン |
| CN205703431U (zh) * | 2016-04-13 | 2016-11-23 | 中山市赛佳数控机械有限公司 | 一种带伺服刀库的雕刻机床 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112021001993T5 (de) | 2023-01-19 |
| CN115720539A (zh) | 2023-02-28 |
| JPWO2022004485A1 (ja) | 2022-01-06 |
| JP7552693B2 (ja) | 2024-09-18 |
| US20230082204A1 (en) | 2023-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6423209B2 (ja) | 工作機械 | |
| JP5094465B2 (ja) | 工作機械及び該工作機械を用いたワークの内表面加工方法 | |
| JP5429221B2 (ja) | 工具交換装置、及び工具交換装置を備える工作機械 | |
| WO2008016076A1 (fr) | Ensemble combiné de tour de transformation et son support porte-outil | |
| JP5497582B2 (ja) | 横型マシニングセンタ | |
| JP6807669B2 (ja) | 工作機械ユニット | |
| JP3877560B2 (ja) | 自動工具交換装置 | |
| JP2010064243A6 (ja) | 複数のワークピーススピンドルを備えた多軸旋盤 | |
| JP5385036B2 (ja) | 工具マガジン | |
| WO2022004485A1 (ja) | 工具交換装置と工作機械 | |
| JPH0451296B2 (ja) | ||
| WO2022004484A1 (ja) | アーム、工具マガジン及び工作機械 | |
| JP2009291848A (ja) | 工作機械 | |
| JP5149031B2 (ja) | 工作機械 | |
| JP4330413B2 (ja) | 自動工具交換装置 | |
| JP3650706B2 (ja) | 工作機械 | |
| JP3233444U (ja) | 工具マガジン及び工作機械 | |
| JPH10315077A (ja) | 横形マシニングセンタ | |
| JP6716369B2 (ja) | 工作機械 | |
| JP7501405B2 (ja) | 工具マガジン及び工作機械 | |
| JP7501404B2 (ja) | 工具マガジン及び工作機械 | |
| JP5914215B2 (ja) | 工作機械 | |
| JP6429968B1 (ja) | 工具交換装置 | |
| JP5398216B2 (ja) | 工具マガジン | |
| JPH05228767A (ja) | 工具交換装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21832565 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022533889 Country of ref document: JP Kind code of ref document: A |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21832565 Country of ref document: EP Kind code of ref document: A1 |