WO2019229871A1 - ウエハ検査装置およびウエハ検査方法 - Google Patents
ウエハ検査装置およびウエハ検査方法 Download PDFInfo
- Publication number
- WO2019229871A1 WO2019229871A1 PCT/JP2018/020719 JP2018020719W WO2019229871A1 WO 2019229871 A1 WO2019229871 A1 WO 2019229871A1 JP 2018020719 W JP2018020719 W JP 2018020719W WO 2019229871 A1 WO2019229871 A1 WO 2019229871A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- wafer
- height
- optical
- control device
- stage
- Prior art date
Links
Images










Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67288—Monitoring of warpage, curvature, damage, defects or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/10—Measuring as part of the manufacturing process
- H01L22/12—Measuring as part of the manufacturing process for structural parameters, e.g. thickness, line width, refractive index, temperature, warp, bond strength, defects, optical inspection, electrical measurement of structural dimensions, metallurgic measurement of diffusions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/06—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness for measuring thickness ; e.g. of sheet material
- G01B11/0608—Height gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9501—Semiconductor wafers
- G01N21/9505—Wafer internal defects, e.g. microcracks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/22—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material
- G01N23/225—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material using electron or ion
- G01N23/2251—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material using electron or ion using incident electron beams, e.g. scanning electron microscopy [SEM]
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70483—Information management; Active and passive control; Testing; Wafer monitoring, e.g. pattern monitoring
- G03F7/70605—Workpiece metrology
- G03F7/70616—Monitoring the printed patterns
- G03F7/70625—Dimensions, e.g. line width, critical dimension [CD], profile, sidewall angle or edge roughness
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/64—Analysis of geometric attributes of convexity or concavity
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/72—Combination of two or more compensation controls
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/07—Investigating materials by wave or particle radiation secondary emission
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/20—Sources of radiation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/50—Detectors
- G01N2223/507—Detectors secondary-emission detector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/60—Specific applications or type of materials
- G01N2223/611—Specific applications or type of materials patterned objects; electronic devices
- G01N2223/6116—Specific applications or type of materials patterned objects; electronic devices semiconductor wafer
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10056—Microscopic image
- G06T2207/10061—Microscopic image from scanning electron microscope
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30148—Semiconductor; IC; Wafer
Definitions
- the present disclosure relates to, for example, a wafer inspection apparatus and a wafer inspection method for inspecting a wafer used in an electronic device.
- a fine device is formed on a wafer made of Si, SiC, or the like polished in a mirror shape. If there are foreign matter, scratches, crystal defects, etc. on the wafer, it will lead to defective manufactured devices. In order to reduce the defective rate of the manufactured device, it is important to inspect the wafer during the manufacturing process and manage each manufacturing process. Therefore, an optical wafer inspection apparatus capable of observing foreign matter and scratches on the wafer surface with the reflected light by irradiating light or laser, and recently, the wafer surface and the wafer with the reflected electrons irradiating uniformly with an electron beam. There is an attempt to inspect the entire surface of the wafer by using a wafer inspection apparatus applying a mirror electron microscope capable of observing internal defects. The performance required for these inspection apparatuses is high-speed inspection and high recognition accuracy of foreign matter and defects.
- TDI Time Delay Integration
- Patent Document 1 discloses an inspection apparatus using a mirror electron microscope that corrects the deviation of the measurement position by correcting the inclination of the measurement position.
- Patent Document 2 discloses a surface state observation apparatus using a mirror electron microscope in which the stage speed is adjusted to correct distortion of an optical system.
- the present disclosure has been made in view of such a situation, and provides a wafer inspection technique in which image quality is hardly deteriorated even in an observation target having a height variation due to wafer warpage or the like.
- a wafer inspection apparatus is placed on a stage on which a wafer is placed and moved, an optical observation unit that optically observes the surface of the wafer, and a stage that moves.
- a TDI camera having a time-delay integration type image detection element that converts an optical signal obtained by observing the wafer surface into an electrical signal, a stage position detector that detects the position of the stage, and the height of the wafer surface And at least one height sensor for measuring, an imaging optical system control device for controlling the optical observation unit, and a camera control device for controlling the TDI camera, wherein the imaging optical system control device has at least one height. Based on the height of the wafer surface measured by the sensor, the optical magnification of the optical observation unit is changed to focus on the wafer surface. Based on the location of the di, it corrects the switching timing of the image sensing element.
- FIG. 1 is a diagram showing a cross-sectional configuration example of a wafer inspection apparatus using a mirror electron microscope according to a first embodiment. It is a figure for demonstrating the principle of a camera control system. It is a figure for demonstrating the principle of a camera control system. It is a figure for demonstrating the method of imaging a smooth curved surface using a camera control principle. It is an upper view which shows a mode that the CCD line sensor 13 was seen from the lens 15 side. It is a figure for demonstrating the visual field when optical magnifications differ. It is a figure which shows the cross-sectional structural example of the wafer inspection apparatus using the mirror electron microscope by 2nd Embodiment.
- FIG. 1 is a diagram showing a cross-sectional configuration example of a wafer inspection apparatus using a mirror electron microscope according to the first embodiment.
- an incident electron beam 21 generated by an electron source 20 is made into a parallel beam having a large diameter by an irradiation optical system 16 and is incident on the surface of a wafer 9.
- a negative potential is applied to the stage 2 on which the wafer 9 is placed by the negative potential application power source 17 so that the incident electron beam 21 rebounds, and the electron beam is reflected on the wafer surface.
- the reflected electrons are condensed as a reflected electron beam 22 by the imaging optical system 5 and enter the fluorescent plate 6.
- the light is converted into light 23 proportional to the electron beam density.
- the light may be infrared light, visible light, ultraviolet light, vacuum ultraviolet light, X-ray or the like depending on the energy of the reflected electron beam.
- the light 23 is optically focused by the optical lens 14 and is incident on the TDI camera 1.
- the stage 2 includes at least two-axis stages that move in the horizontal direction and the vertical direction with respect to the paper surface, and is moved in the horizontal direction in the stage advancing direction 19 during the inspection.
- the height of the observation position on the surface of the wafer 9 is measured by the height sensor 3, and the height data 33 of the observation position is input to the imaging optical system controller 10.
- the imaging optical system control device 10 inputs an imaging optical system control signal 38 to the imaging optical system 5 so that the observation image at the height position of the height data 33 is focused on the fluorescent screen 6.
- the imaging optical system control device 10 calculates the optical magnification of the imaging optical system 5 at this time, and inputs the optical magnification data 34 to the TDI camera control device 11. Then, the TDI camera control device 11 changes the optical magnification of the imaging optical system 5 to focus on the surface on the wafer 9 whose height has changed.
- the stage 2 is controlled by the stage control device 8 in accordance with the stage position command 30 from the overall control device 12 so as to have a constant speed as much as possible during image capturing.
- the stage position is observed by the laser interferometer 4, and the stage position data 32 is input to the TDI camera control device 11.
- the entire wafer inspection apparatus is controlled by the overall control apparatus 12.
- the overall control device 12 inputs a stage position command (for example, information indicating the number of rotations of the motor) 30 to the stage control device 8, and in response thereto, the stage control device 8 receives a position control signal (information of coordinate position) 31. Is supplied to the stage driving device 7, and the position of the stage 2 is controlled to a desired place. Further, the overall control device 12 supplies an image ON-OFF signal (clock adjustment signal) 36 to the TDI camera 1, controls image capturing, and acquires image data 37.
- a stage position command for example, information indicating the number of rotations of the motor
- the stage control device 8 receives a position control signal (information of coordinate position) 31. Is supplied to the stage driving device 7, and the position of the stage 2 is controlled to a desired place.
- the overall control device 12 supplies an image ON-OFF signal (clock adjustment signal) 36 to the TDI camera 1, controls image capturing, and acquires image data 37.
- the TDI camera control device 11 inputs a line switching signal 35 to the TDI camera 1 at a timing when the movement of the stage 2 becomes one line width of the CCD line sensor 13 from the magnification data 34 and the stage position data 32.
- the switching signal in consideration of the magnification data 34 corresponding to the wafer height data, it is possible to obtain a height-corrected image.
- FIGS. 2 and 3 are diagrams for explaining the principle of the camera control system.
- FIGS. 2 and 3 are schematic views in which FIG. 1 is simplified.
- the wafer 9 has a two-step height so that it can be easily understood, but is stepped, and the surface of the wafer 9 is observed at each height. The conditions will be described.
- the imaging optical system 5 in FIG. 1 is simply represented by a single lens 15.
- FIG. 2 shows a state where the left half of the wafer is being observed.
- the height of the observation position on the surface of the wafer 9 is measured by the height sensor 3, and the height data 33 of the observation position is input from the height sensor 3 to the imaging optical system controller 10.
- the imaging optical system control device 10 inputs an imaging optical system control signal 38 to the lens 15 so that the image of the observation surface 300 on the wafer is focused on the fluorescent screen 6 in accordance with the height of the height data 33.
- the imaging optical system control device 10 calculates the optical magnification of the lens 15 at this time, and inputs the optical magnification data 34 to the TDI camera control device 11.
- the stage 2 is controlled to have a constant speed as much as possible during image capturing, the stage position is observed by the laser interferometer 4, and the stage position data 32 is input to the TDI camera control device 11.
- the line switching signal 35 is input to the TDI camera 1 at a timing when the distance 101a transferred to the CCD line sensor by the lens 15 corresponding to the moving distance 102a becomes equal to the width of the CCD line sensor.
- the TDI camera 1 moves the charge stored by converting the optical signal by the CCD line sensor 13a to the CCD line sensor 13b along the route indicated by the charge movement 40a.
- the CCD line sensor 13b also converts the optical signal and stores electric charges.
- the TDI camera 1 accumulates electric charges in the CCD line sensors 13c and 13d one after another, thereby converting an optical signal into electric charges and accumulating them while observing the same point with adjacent line sensors. And a bright image can be obtained.
- a method of capturing an image while integrating charges with a CCD line sensor is called a time-delay integration method, and an integration time in which a single point image is repeatedly integrated by the number of line sensors is called a time-delay integration time. To do.
- the TDI camera 1 Since the TDI camera 1 has about 64, 128, 256, and 512 stages of CCD line sensors, the longer the time delay integration time, the brighter the image can be obtained.
- the stage moving distance can be calculated by calculating the moving distance from the stage position data 32 from the laser interferometer 4.
- FIG. 3 shows a state where the right half of the wafer 9 is being observed.
- the wafer height at the observation position is different, and the control method and the like operate in exactly the same way.
- the optical magnification set by the imaging optical system control device 10 also becomes a different value.
- the optical magnification is f2
- the width of the CCD line sensor is W
- the stage moving distance is d
- Equation (2) is obtained. If the TDI camera control device 11 operates so as to input the line switching signal 35 to the TDI camera at a satisfactory timing, the TDI camera is in a condition for capturing an ideal image.
- W f2 ⁇ d (2)
- the wafer surface whose height changes can be observed by adjusting the timing of generating the line switching signal 35 every time the height changes.
- the height sensor 3 detects that a change in height has occurred, and changes the magnification. Then, by changing the information of the magnification (change) and the clock (line switching signal 35) output from the moving distance of the stage 2, it is possible to change the in-focus location.
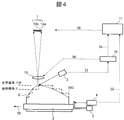
- FIG. 4 is a diagram for explaining a method of imaging a smooth curved surface using the above-described camera control principle. The only difference between FIG. 4 and FIGS. 2 and 3 is the cross-sectional shape of the wafer 9.
- the optical magnification is adjusted at the timing when the wafer height at the observation position changes and an error of ⁇ f occurs from the ideal optical magnification f.
- ⁇ f is referred to as an optical magnification error allowable value. From this point of view, the observation surface 300 is stepped.
- the optical magnification allowable value ⁇ f is large, the magnification changes abruptly when the TDI camera 1 takes an image, and the image is disturbed because the field of view changes instantaneously. Therefore, it is necessary to obtain the condition of the allowable optical magnification value ⁇ f that can reduce the disturbance of the image.
- FIG. 5 is a top view showing the CCD line sensor 13 as viewed from the lens 15 side.
- the CCD line sensor 13 is composed of a plurality of CCD pixels 39 arranged in the vertical direction on the paper surface.
- the number of pixels constituting the CCD line sensor 13 is M columns. It is assumed that the CCD line sensor 13 constitutes the TDI camera 1 in N stages.
- the charge movements 40a and 40b when the line switching signal 35 described with reference to FIG. 3 is input the charges move to pixels adjacent in the horizontal direction in two dimensions.
- FIG. 6 is a diagram for explaining the field of view when the optical magnifications are different.
- a case is considered in which the visual field 51a at the optical magnification f changes to the optical magnification f + ⁇ f and becomes the visual field 51b in the TDI camera 1 during the time delay integration time.
- a CCD camera can tolerate fluctuations of about two adjacent pixels due to vibrations of the apparatus, electrical noise, and the like. Therefore, it can be seen that the change in the optical magnification does not affect the image of the TDI camera if the change in the visual field during the time delay integration time is one pixel or less (two pixels on both sides).
- the range of the magnitude of the optical magnification fluctuation ⁇ f that does not affect the image of the TDI camera 1 from the change of the optical magnification in the direction in which the CCD line sensors 13 are arranged is the number of stages of the TDI CCD line sensor.
- ⁇ 2 / N (7) Therefore, it can be seen that the optical magnification change amount ⁇ f that satisfies the condition of Expression (7) does not affect the image of the TDI camera.
- the conditions for the direction in which the pixels of the CCD line sensor 13 are arranged are as follows: the number of columns of the CCD line sensor 13 is M, the optical magnification is f, and the pixels of the CCD line sensor 13 are in that direction.
- the width W
- the width that the CCD line sensor 13 with the width W can be seen on the stage 2 is e
- the equation corresponding to the equation (3) is as the equation (8).
- W f ⁇ e (8)
- the change in optical magnification in the direction in which the pixels of the CCD line sensor 13 are arranged has a magnitude of the optical magnification fluctuation ⁇ f that does not affect the image of the TDI camera 1.
- M is the number of columns of the CCD line sensor 13 of the TDI camera 1.
- the optical magnification changes by about 1% when the height changes by about 100 ⁇ m.
- FIG. 7 is a diagram illustrating a cross-sectional configuration example of a wafer inspection apparatus using a mirror electron microscope according to the second embodiment.
- components 1 to 38 are the same as those in FIG.
- the wafer inspection apparatus according to the second embodiment includes a height data buffer 110.
- the buffer 110 temporarily stores and stores past height data.
- FIG. 8 is a diagram showing a trajectory 111 for inspecting the wafer.
- the inspection of the wafer 9 is performed by taking an image with the TDI camera 1 while moving the stage 2 in the vertical direction.
- the stage 2 temporarily stops, moves about the field of view of the TDI camera 1 in the horizontal direction of the paper, and moves in the opposite direction again to take an image.
- the adjacent trajectory 111a and the trajectory 111b are only separated by a distance of about one field of view (for example, 100 ⁇ m), and therefore can be regarded as having substantially the same height.
- height data 33 collected by the height sensor 3 during imaging of the trajectory 111a is stored in the buffer 110, and height data stored in the buffer 110 (obtained by imaging the trajectory 111a is acquired during imaging of the trajectory 111b. Height correction) can be used to perform height correction.
- this method it is possible to prepare in advance the timing for generating the line switching signal 35 before imaging, and there is no need to calculate while measuring the height during imaging.
- the height data is not stored in the buffer 110 in the first trajectory 111c (there is no past height data)
- only the 111c is moved along the same trajectory and the height data is stored in the buffer 110. Processing is required.
- the past height data to be used may not be data obtained by imaging the previous trajectory. For example, past height data may be used about once for trajectory imaging for 10 lines.
- FIG. 9 is a diagram illustrating a cross-sectional configuration example of a wafer inspection apparatus using a mirror electron microscope according to the third embodiment.
- components 1 to 38 are the same as those of the wafer inspection apparatus (FIG. 1) according to the first embodiment.
- the wafer inspection apparatus according to the third embodiment differs from the wafer inspection apparatus according to the first embodiment (FIG. 1) in that two height sensors are installed, and at least 2 in the direction of stage movement at the observation position. It is possible to measure the height of the points.
- two height sensors are provided has been described.
- three or more height sensors may be provided, and the observation surface 300 may be approximated based on the respective measurement results.
- FIG. 10 is a diagram for explaining the observation surface calculation process by measuring the height of two points.
- the height sensor 3 a and the height sensor 3 b measure two points separated by a distance X before the observation position, respectively, and an imaging optical system controller for an observation plane 300 that approximates the two points with a straight line.
- the operation is performed at 10.
- the wafer 9 is moved in the stage advancing direction 19 and the calculated observation plane 300 data is prepared in advance. By doing in this way, the frequency
- the optical magnification changes by about 1% when the height changes by about 100 ⁇ m.
- Y 19.5 ⁇ m.
- X ⁇ 19.5 ⁇ 150/100 29.3 mm from Equation (11). It can be seen that the distance X should be smaller than 3 mm.
- the calculation for obtaining the observation surface 300 is performed every time the stage 2 moves by the distance X.
- the observation surface 300 is changed every time the stage 2 moves by the distance 2X.
- the observation surface obtained by calculation may be used at a distance of 2X.
- FIG. 11 is a diagram showing a cross-sectional configuration example of a wafer inspection apparatus using an optical microscope according to a fourth embodiment.
- components 1 to 38 are the same as those of the wafer inspection apparatus (FIG. 1) according to the first embodiment.
- the wafer inspection apparatus according to the fourth embodiment is different from the case where the wafer inspection apparatus according to the first embodiment observes an electron beam and observes the light 54 on the wafer 9 by the light source 53, and the reflected light thereof.
- the wafer 9 is observed by condensing 52 on the CCD line sensor 13 via the window 60 of the TDI camera 1 by the condenser lens 50.
- the light source 53 for example, in order to take an image with a high optical magnification, it is desirable to use a single wavelength light source in order to eliminate chromatic aberration as much as possible. Therefore, it is desirable to limit the wavelength by using a bandpass filter at the exit of the light source 53, or to use an LD light source, a laser light source, an X-ray source, or the like.
- the wafer inspection apparatus according to the fourth embodiment has the same configuration as the wafer inspection apparatus according to the first embodiment except for the configuration described above, and the functions and configurations according to the second to fourth embodiments are applied. It is possible to do this and it is equally effective.
- the imaging optical system controller 10 determines the optical observation unit (5 and 16) based on the height of the surface of the wafer 9 measured by the at least one height sensor 3. Or 50 and 53) to change the optical magnification to focus on the surface of the wafer, and the camera control device (TDI camera control device 11) uses the image detection element (TDI camera) based on the optical magnification and the position of the stage 2. The switching timing of one CCD line sensor 13) is corrected. By doing in this way, it becomes possible to obtain a high-quality observation image by suppressing the deterioration of the image quality even for an observation object having a height variation due to warpage of the wafer, a step or the like.
- the optical observation unit for example, the electron source 20, and the irradiation optical system 16 that irradiates the wafer 9 with a planar incident electron beam from the electron source 20,
- a negative potential application power source 17 for applying a negative potential on the surface of the wafer 9
- a condensing optical system (imaging optical system 5) for condensing a reflected electron beam reflected by the negative potential formed on the surface of the wafer 9
- a mirror electron microscope including a fluorescent plate 6 that condenses light by a condensing optical system and converts light into an electrical signal can be used.
- the optical observation unit for example, a light source 53 and an irradiation unit (irradiation optical system not shown) that irradiates the light emitted from the light source 53 onto the wafer 9;
- An optical microscope that observes the collected light which includes a condenser lens 50 that collects the reflected light reflected by the surface of the wafer 9, can be used. By doing so, it becomes possible to inspect the entire surface of the wafer 9 with a relatively simple configuration while adapting to height fluctuations.
- the camera control device (TDI camera control device 11) is configured so that the change in the optical magnification of the optical observation unit is 1% or less so that the image detection element (CCD line sensor 13) Correct the switching timing. By doing in this way, it can prevent that a visual field changes rapidly in the image acquired.
- the wafer inspection apparatus includes a buffer 110 for storing the height data of the surface of the wafer 9, and temporarily stores the height data of the wafer 9 acquired when the wafer is inspected in the past.
- the camera control device (TDI camera control device 11) is stored in the buffer 110 as a trajectory (see FIG. 8) for reciprocating inspection on the wafer 9 while shifting the observation position on the surface of the wafer 9.
- the switching timing of the image detection element (CCD line sensor 13) is corrected using the past height data. By doing so, it is not necessary to calculate the switching timing while measuring the height of the wafer 9 during image capturing, and the processing speed can be increased.
- At least two wafer height sensors 3a and 3b are provided.
- at least two heights of the surface of the wafer 9 are observed using at least two wafer height sensors 3a and 3b, and the imaging optical system controller 10 is based on the observed height data of at least two points.
- the surface of the wafer 9 is estimated by the inclined approximate plane.
- the camera control device TDI camera control device 11
- the camera control device corrects the switching timing of the image detection element (CCD line sensor 13) so that the height of the surface of the wafer 9 becomes the estimated approximate plane height.
- the number of times of height measurement can be reduced, and the processing speed can be increased.
- TDI camera 2 stages 3 Height sensor 4 Laser interferometer 5 Imaging optical system 6 Fluorescent screen 7 Stage drive device 8 Stage control device 9 Wafer 10 Imaging optical system control device 11 TDI camera control device 12 Overall control device 13 CCD line sensor 14 Optical lens 15 Lens 16 Irradiation optical system 17 Negative potential application power source 19 Stage traveling direction 20 Electron source 21 Incident electron beam 22 Backscattered electron beam 30 Stage position command 31 Position control signal 32 Stage position data 33 Height data 34 Optical magnification data 35 Line switching signal 36 Image ON-OFF signal 37 Image data 38 Imaging optical system control signal 39 CCD pixel 40 Charge transfer 50 Condenser lens 51 Field of view 52 Reflected light 53 Light source 54 Light 60 Window 101 Transfer distance 102 Travel distance 110 Buffer 111 Trajectory 300 Observation surface
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Quality & Reliability (AREA)
- Geometry (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
本開示は、ウエハの反り等による高さ変動がある観測対象においても画質の劣化が少ないウエハ検査技術を提供する。ウエハ検査装置は、ウエハ表面高さを測定する高さセンサで測定した高さに観測光学系の焦点を合わせ、また、高さに応じた光学倍率データとステージ位置データからCCDラインセンサの切り替え信号を補正してウエハ表面高さに応じた補正を実施することにより、劣化の少ない画像を得る(図1参照)。
Description
本開示は、例えば、電子デバイスに用いられるウエハを検査するウエハ検査装置およびウエハ検査方法に関する。
半導体デバイスの製造では、鏡面状に研磨されたSiやSiCなどを材料とするウエハ上に微細なデバイスを形成する。ウエハ上に異物、傷、結晶欠陥等があると製造されたデバイス不良につながる。製造されたデバイスの不良率を低下させるためには、製造工程中にウエハ上を検査して各製造工程の管理が重要である。そこで、光やレーザを照射してその反射光によりウエハ表面の異物や傷を観測可能な光学的なウエハ検査装置や、最近は電子線を一様に照射してその反射電子によりウエハ表面及びウエハ内部欠陥も観測可能なミラー電子顕微鏡を応用したウエハ検査装置によりウエハ上を全面検査する試みがある。
これらの検査装置に求められる性能としては、検査の高速化と、異物や欠陥の高い認識精度である。
これらの検査装置に求められる性能としては、検査の高速化と、異物や欠陥の高い認識精度である。
検査の高速化(スループット向上)の要求には、ウエハを移動させながら画像を撮像できる時間延滞積分(TDI:Time Delay Integration)型のTDIカメラを用いることで対応できる。しかし、TDIカメラは、ウエハを移動させながら撮像するので、ウエハに反りが有る場合には、測定位置の傾きや高さ変動の影響で画像に乱れが生じる。
例えば、特許文献1は、測定位置の傾きを補正して測定位置のズレを補正したミラー電子顕微鏡を用いた検査装置について開示する。また、特許文献2は、ステージ速度を調整して光学系の歪曲収差を補正したミラー電子顕微鏡を用いた表面状態観測装置について開示する。
しかしながら、特許文献1による検査装置では、測定位置の傾きの影響については考慮されているが、高さ変動の影響については考慮されていない。また、特許文献2による表面状態観測装置では、光学系の視野内の倍率のムラについての補正について考慮されているが、観測対象の高さ変動の影響については考慮されていない。このため、これらの技術を用いたとしても画像の乱れに充分に対応することはできず、高さ変動の影響を軽減する技術が望まれている。
本開示はこのような状況に鑑みてなされたものであり、ウエハの反り等による高さ変動がある観測対象においても画質の劣化が少ないウエハ検査技術を提供するものである。
上記課題を解決するために、本開示によるウエハ検査装置は、ウエハを載置し、移動させるステージと、ウエハの表面を光学的に観察する光学的観察部と、移動するステージに載置されたウエハの表面を観測して得られる光信号を電気信号に変換する時間延滞積分型の画像検出素子を有するTDIカメラと、ステージの位置を検出するステージ位置検出器と、ウエハの表面の高さを測定する、少なくとも1つの高さセンサと、光学的観察部を制御する撮像光学系制御装置と、TDIカメラを制御するカメラ制御装置と、を備え、撮像光学系制御装置は、少なくとも1つの高さセンサによって測定されたウエハの表面の高さに基づいて、光学的観察部の光学倍率を変化させてウエハの表面に焦点を合わせ、カメラ制御装置は、光学倍率とステージの位置に基づいて、画像検出素子の切り替えタイミングを補正する。
本開示に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、本開示の態様は、要素及び多様な要素の組み合わせ及び以降の詳細な記述と添付される特許請求の範囲の様態により達成され実現される。
本明細書の記述は典型的な例示に過ぎず、特許請求の範囲又は適用例を如何なる意味に於いても限定するものではないことを理解する必要がある。
本明細書の記述は典型的な例示に過ぎず、特許請求の範囲又は適用例を如何なる意味に於いても限定するものではないことを理解する必要がある。
本開示によれば、ウエハの反りによるTDIカメラ画像の劣化を補正することが可能となり、鮮明な検査画像を得ることが可能となる。
以下、添付図面を参照して本開示の実施形態について説明する。添付図面では、機能的に同じ要素は同じ番号で表示される場合もある。なお、添付図面は本開示の原理に則った具体的な実施形態と実装例を示しているが、これらは本開示の理解のためのものであり、決して本開示を限定的に解釈するために用いられるものではない。
本実施形態では、当業者が本開示を実施するのに十分詳細にその説明がなされているが、他の実装・形態も可能で、本開示の技術的思想の範囲と精神を逸脱することなく構成・構造の変更や多様な要素の置き換えが可能であることを理解する必要がある。従って、以降の記述をこれに限定して解釈してはならない。
(1)第1の実施形態
<ウエハ検査装置の構成例>
図1は、第1の実施形態による、ミラー電子顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図1において、電子源20で発生した入射電子線21を照射光学系16により径の太い平行ビームにしてウエハ9表面に入射する。ウエハ9を置くステージ2には入射電子線21を跳ね返すようにウエハ9を負電位印加電源17により負電位を印加して電子線をウエハ表面で反射させる。その反射した電子を撮像光学系5により反射電子線22として集光させて蛍光板6に入射する。蛍光板6では、電子線の密度に比例した光23に変換される。光は、反射電子線のエネルギーに応じて、赤外光、可視光、紫外光、真空紫外光、X線などの場合がある。その光23を光学レンズ14により光学的なピントを合わせてTDIカメラ1へ入射する。ステージ2は少なくとも紙面に対して水平方向と垂直方向に移動する2軸以上のステージを備え、検査中は水平方向にステージ進行方向19へ移動させる。
<ウエハ検査装置の構成例>
図1は、第1の実施形態による、ミラー電子顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図1において、電子源20で発生した入射電子線21を照射光学系16により径の太い平行ビームにしてウエハ9表面に入射する。ウエハ9を置くステージ2には入射電子線21を跳ね返すようにウエハ9を負電位印加電源17により負電位を印加して電子線をウエハ表面で反射させる。その反射した電子を撮像光学系5により反射電子線22として集光させて蛍光板6に入射する。蛍光板6では、電子線の密度に比例した光23に変換される。光は、反射電子線のエネルギーに応じて、赤外光、可視光、紫外光、真空紫外光、X線などの場合がある。その光23を光学レンズ14により光学的なピントを合わせてTDIカメラ1へ入射する。ステージ2は少なくとも紙面に対して水平方向と垂直方向に移動する2軸以上のステージを備え、検査中は水平方向にステージ進行方向19へ移動させる。
ウエハ9表面の観測位置の高さを高さセンサ3により測定し、観測位置の高さデータ33が撮像光学系制御装置10に入力される。撮像光学系制御装置10は、高さデータ33の高さの位置の観測画像が蛍光板6上にピントが合うように、撮像光学系5に撮像光学系制御信号38を入力する。撮像光学系制御装置10は、このときの撮像光学系5の光学倍率を計算してその光学倍率データ34をTDIカメラ制御装置11に入力する。そして、TDIカメラ制御装置11は、撮像光学系5の光学倍率を変えて、高さが変化したウエハ9上の面に焦点を合わせる。
ステージ2は、全体制御装置12からのステージ位置指令30に応じてステージ制御装置8により制御され、画像撮像中は極力一定速度となるようにする。ステージ位置はレーザ干渉計4により観測され、ステージ位置データ32はTDIカメラ制御装置11に入力される。
ウエハ検査装置全体は、全体制御装置12により制御される。全体制御装置12は、ステージ制御装置8にステージ位置指令(例えば、モータの回転数を示す情報)30を入力し、それに応答して、ステージ制御装置8が位置制御信号(座標位置の情報)31をステージ駆動装置7に供給し、ステージ2の位置を所望の場所に制御する。また、全体制御装置12は、TDIカメラ1に画像ON-OFF信号(クロック調整用信号)36を供給し、撮像撮影を制御して、画像データ37を取得する。
TDIカメラ制御装置11は、倍率データ34とステージ位置データ32からステージ2の移動がCCDラインセンサ13の1ライン幅となるタイミングでライン切り替え信号35をTDIカメラ1に入力する。この切り替え信号をウエハの高さデータに対応した倍率データ34を考慮したものとすることで、高さ補正された画像を得ることができる。
<カメラ制御の原理>
図2および図3は、カメラ制御系の原理を説明するための図である。図2及び図3は、図1を簡略化した模式図であり、ウエハ9は分かり易いように2段階の高さを持つも階段状のとして、それぞれの高さでウエハ9の表面を観測する条件について説明する。また、図2および図3では、図1での撮像光学系5を簡略的に一枚のレンズ15で表記している。
図2および図3は、カメラ制御系の原理を説明するための図である。図2及び図3は、図1を簡略化した模式図であり、ウエハ9は分かり易いように2段階の高さを持つも階段状のとして、それぞれの高さでウエハ9の表面を観測する条件について説明する。また、図2および図3では、図1での撮像光学系5を簡略的に一枚のレンズ15で表記している。
図2は、ウエハの左半分を観測している状態を示している。ウエハ9の表面の観測位置の高さを高さセンサ3により測定し、観測位置の高さデータ33が高さセンサ3から撮像光学系制御装置10に入力される。撮像光学系制御装置10は、高さデータ33の高さに合わせてウエハ上の観測面300の画像が蛍光板6にピントが合うようにレンズ15に撮像光学系制御信号38を入力する。撮像光学系制御装置10は、このときのレンズ15の光学倍率を計算してその光学倍率データ34をTDIカメラ制御装置11に入力する。ステージ2は画像撮像中には極力一定速度となるように制御され、ステージ位置はレーザ干渉計4により観測され、ステージ位置データ32はTDIカメラ制御装置11に入力される。
上記の状態でウエハ上のある1点が観測される状況を説明する。ある1点が移動距離102aに相当する部分を移動する時間帯では、その点はCCDラインセンサ13aにて観測される。そして、移動距離102aに相当する距離がレンズ15によってCCDラインセンサに転写される距離101aがCCDラインセンサの幅と等しくなったタイミングでライン切り替え信号35をTDIカメラ1に入力する。このライン切り替え信号35が入力されると、TDIカメラ1は、CCDラインセンサ13aで光信号を変換して蓄えた電荷を、電荷移動40aに示すルートでCCDラインセンサ13bに移動させる。
次に、ある1点が移動距離102bに相当する部分を移動する時間帯では、その1点はCCDラインセンサ13bにて観測され、TDIカメラ1は、CCDラインセンサ13aでの電荷に加えて、CCDラインセンサ13bでも光信号を変換して電荷を蓄える。このように、TDIカメラ1は、次々とCCDラインセンサ13cおよび13dでも同様に電荷を蓄積することにより、隣り合うラインセンサで同一点を観測しながら光信号を電荷に変換して蓄積することができ、明るい画像を得ることが可能となる。CCDラインセンサで電荷を積分しながら画像を撮像する方法を時間延滞積分方式と呼び、ある1点の画像をラインセンサの数だけ積分を繰り返して撮影する積分時間を時間延滞積分時間と呼ぶこととする。
TDIカメラ1がCCDラインセンサを64、128、256、512段程度の段数備えることで、時間延滞積分時間が長くなればなるほど明るい画像を得ることが可能となる。
ここで、光学倍率をf1、CCDラインセンサの幅をW、ステージ移動距離をdとすると、式(1)を満足するようなタイミングでライン切り替え信号35をTDIカメラに入力するようにTDIカメラ制御装置11が動作すれば、TDIカメラとしては理想的な画像を撮像する条件となる。
W=f1・d ・・・ (1)
ステージ移動距離は、レーザ干渉計4からのステージ位置データ32より移動距離を演算することで計算できる。
W=f1・d ・・・ (1)
ステージ移動距離は、レーザ干渉計4からのステージ位置データ32より移動距離を演算することで計算できる。
次に、図3はウエハ9の右半分を観測している状態を示している。図2との違いは、観測位置のウエハ高さが異なることのみであり、制御方法等は全く同様に動作する。ウエハ高さが異なることで、撮像光学系制御装置10が設定する光学倍率も異なる値となりその光学倍率をf2、CCDラインセンサの幅をW、ステージ移動距離をdとすると、式(2)を満足するようなタイミングでライン切り替え信号35をTDIカメラに入力するようにTDIカメラ制御装置11が動作すればTDIカメラとしては理想的な画像を撮像する条件となる。
W=f2・d ・・・ (2)
W=f2・d ・・・ (2)
上記のように、高さが変化する毎にライン切り替え信号35を発生するタイミングを調整することで高さが変化するウエハ表面の観測が可能となる。具体的には、高さセンサ3で高さの変化が起こったことを検知し、倍率を変化させる。そして、倍率(の変化)の情報と、ステージ2の移動距離から出力するクロック(ライン切り替え信号35)を変えることでピントが合う場所を変えることができる。
<滑らかな曲面を撮像する方法>
図4は、上述のカメラ制御原理を用いて滑らかな曲面を撮像する方法を説明するための図である。図4と図2および図3との違いは、ウエハ9の断面形状のみである。
図4は、上述のカメラ制御原理を用いて滑らかな曲面を撮像する方法を説明するための図である。図4と図2および図3との違いは、ウエハ9の断面形状のみである。
高さセンサ3で細かく高さデータを測定してそれに合わせて観測面300を設定すれば滑らかに曲面上を撮像可能となる。しかし、このようにすると、撮像光学系制御装置10とTDIカメラ制御装置11の演算回数が膨大となり、制御系が追いつかない可能性が高くなる。そこで、本実形態では、観測位置のウエハ高さが変化して理想の光学倍率fからδfだけ誤差が発生したタイミングで光学倍率を調整する方法とする。ここで、δfを光学倍率誤差許容値と呼ぶ。この考え方からすると、観測面300は階段状となる。
ただし、光学倍率許容値δfが大きいと、TDIカメラ1で撮像する上で倍率が急激に変化することになり、視野が瞬間的に変わることから画像が乱れることになる。そこで、画像の乱れが小さくできる光学倍率許容値δfの条件を求める必要がある。
図5は、CCDラインセンサ13をレンズ15側から見た様子を示す上視図である。CCDラインセンサ13は、紙面上下方向に配列された複数のCCD画素39で構成される。CCDラインセンサ13を構成する画素数をM列とする。また、このCCDラインセンサ13がN段でTDIカメラ1を構成しているものとする。図3で説明したライン切り替え信号35が入るときの電荷移動40aおよび40bは、二次元的には水平方向に隣接する画素に電荷が移動する。
図6は、光学倍率が異なる場合の視野について説明するための図である。図6を参照して、TDIカメラ1において、時間延滞積分時間中に光学倍率fのときの視野51aが、光学倍率f+δfと変化して視野51bとなった場合を考える。CCDカメラでは装置の振動や電気的なノイズ等により、隣り合う2画素程度のゆらぎは許容できることが知られている。そこで、時間延滞積分時間中の視野の変化が1画素分(両側で2画素分)以下となる条件であれば、光学倍率の変化によりTDIカメラの画像に影響を与えないことが分かる。その条件として、まずCCDラインセンサ13の並んでいる方向(紙面水平方向)について考える。式(1)と同様に、光学倍率をf、CCDラインセンサ13のその方向の幅をW、ステージ2の移動距離をdとすると、式(3)が成り立つ。
W=f・d ・・・ (3)
W=f・d ・・・ (3)
式(3)をN倍すると、式(4)のようになる。
N・W=f・(N・d) ・・・ (4)
式(4)は、距離N・dが図6の視野51aのCCDラインセンサ13の並んでいる方向(紙面水平方向)の距離N・Wに見えることを示している。この視野51aが倍率f+δfと変化したことにより視野51bとなった場合には、式(5)のように表すことができる。
(N-2)・W=(f+δf)・(N・d) ・・・ (5)
ここで、式(5)から式(4)を引くと、式(6)を得ることができる。
δf/f=-2/N ・・・ (6)
N・W=f・(N・d) ・・・ (4)
式(4)は、距離N・dが図6の視野51aのCCDラインセンサ13の並んでいる方向(紙面水平方向)の距離N・Wに見えることを示している。この視野51aが倍率f+δfと変化したことにより視野51bとなった場合には、式(5)のように表すことができる。
(N-2)・W=(f+δf)・(N・d) ・・・ (5)
ここで、式(5)から式(4)を引くと、式(6)を得ることができる。
δf/f=-2/N ・・・ (6)
式(6)より、CCDラインセンサ13が並んでいる方向についての光学倍率の変化よりTDIカメラ1の画像に影響を与えない光学倍率変動δfの大きさの範囲は、TDIのCCDラインセンサの段数をNとして、式(7)のように表すことができる。
|δf/f| < 2/N ・・・ (7)
よって、式(7)の条件を満たす光学倍率変化量δfであれば、TDIカメラの画像に影響を与えないことが分かる。
|δf/f| < 2/N ・・・ (7)
よって、式(7)の条件を満たす光学倍率変化量δfであれば、TDIカメラの画像に影響を与えないことが分かる。
同様に、CCDラインセンサ13の画素の並んでいる方向(紙面上下方向)についての条件は、CCDラインセンサ13の列数をMとして、光学倍率をf、CCDラインセンサ13の画素のその方向の幅をW、幅WのCCDラインセンサ13がステージ2上で見える幅をeとすると、式(3)に相当する式は、式(8)のようになる。
W=f・e ・・・ (8)
W=f・e ・・・ (8)
後は、NをMに置き換えて同様に解くと、CCDラインセンサ13の画素の並んでいる方向についての光学倍率の変化よりTDIカメラ1の画像に影響を与えない光学倍率変動δfの大きさの範囲は、TDIカメラ1のCCDラインセンサ13の列数をMとして、式(9)のようになる。
|δf/f| < 2/M ・・・ (9)
|δf/f| < 2/M ・・・ (9)
式(7)及び式(8)より、画素数が多い程に光学倍率許容値δfは小さくする必要があり、例えばM=N=1024のTDIカメラでは|δf/f|<0.195%、M=N=256では|δf/f|<0.781%とする必要があり、画素数の小さなTDIカメラであっても光学倍率許容値δfは1%以下とする必要があることが分かる。
なお、光学倍率許容値ではなく、高さ変動に許容値を設けて制御する方法もある。例えば、光学倍率65倍のミラー電子顕微鏡の場合、高さが100μm程度変化すると光学倍率が1%程度変化する。この場合、高さの許容値は、M=N=1024のTDIカメラ1では19.5μm以下、M=N=256では78.1μm以下となる。
このように許容値を設けて図4のように観測面300を設定して高さ補正しながら観測することで反りの大きなウエハ表面の画像を鮮明に撮像することが可能となる。
(2)第2の実施形態
<ウエハ検査装置の構成例>
図7は、第2の実施形態による、ミラー電子顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図7において、構成要素1から38は図1と同じものである。第2の実施形態によるウエハ検査装置は、第1の実施形態によるウエハ検査装置(図1)とは異なり、高さデータのバッファー110を備えている。バッファー110は、過去の高さデータを一時的に格納して保存する。
<ウエハ検査装置の構成例>
図7は、第2の実施形態による、ミラー電子顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図7において、構成要素1から38は図1と同じものである。第2の実施形態によるウエハ検査装置は、第1の実施形態によるウエハ検査装置(図1)とは異なり、高さデータのバッファー110を備えている。バッファー110は、過去の高さデータを一時的に格納して保存する。
<過去の高さデータの活用>
図8は、ウエハ上を検査する軌跡111を示す図である。ウエハ9の検査は、上下方向にステージ2を移動させながらTDIカメラ1で画像を撮像して行われる。ウエハ端まで画像を撮像するとステージ2は一旦停止し、紙面の水平方向にTDIカメラ1の視野程度移動して再び逆方向に移動して画像が撮像される。ここで、例えば、隣り合った軌跡111aと軌跡111bとは、視野1個分程度の距離(例えば、100μm)離れているだけなので、概略同じ高さであると見なすことができる。そこで、軌跡111aの撮像中に高さセンサ3で収集した高さデータ33をバッファー110に格納し、軌跡111bの撮像中にはバッファー110に格納された高さデータ(軌跡111aを撮像して得られた高さデータ)を用いて高さ補正を実施することができる。この方法では撮像前にライン切り替え信号35を発生するタイミングを予め用意することが可能となり、画像撮像中に高さを測定しながら演算する必要がない。ただし、一番初めの軌跡111cではバッファー110に高さデータは保管されていない(過去の高さデータがない)ため、111cのみ1度同じ軌跡で移動させてバッファー110に高さデータを保管させる処理が必要となる。なお、用いる過去の高さデータは、直前の軌跡を撮像して得られたデータでなくてもよい。例えば、10ライン分の軌跡撮像に1回程度の過去の高さデータを用いてもよい。
図8は、ウエハ上を検査する軌跡111を示す図である。ウエハ9の検査は、上下方向にステージ2を移動させながらTDIカメラ1で画像を撮像して行われる。ウエハ端まで画像を撮像するとステージ2は一旦停止し、紙面の水平方向にTDIカメラ1の視野程度移動して再び逆方向に移動して画像が撮像される。ここで、例えば、隣り合った軌跡111aと軌跡111bとは、視野1個分程度の距離(例えば、100μm)離れているだけなので、概略同じ高さであると見なすことができる。そこで、軌跡111aの撮像中に高さセンサ3で収集した高さデータ33をバッファー110に格納し、軌跡111bの撮像中にはバッファー110に格納された高さデータ(軌跡111aを撮像して得られた高さデータ)を用いて高さ補正を実施することができる。この方法では撮像前にライン切り替え信号35を発生するタイミングを予め用意することが可能となり、画像撮像中に高さを測定しながら演算する必要がない。ただし、一番初めの軌跡111cではバッファー110に高さデータは保管されていない(過去の高さデータがない)ため、111cのみ1度同じ軌跡で移動させてバッファー110に高さデータを保管させる処理が必要となる。なお、用いる過去の高さデータは、直前の軌跡を撮像して得られたデータでなくてもよい。例えば、10ライン分の軌跡撮像に1回程度の過去の高さデータを用いてもよい。
(3)第3の実施形態
<ウエハ検査装置の構成例>
図9は、第3の実施形態による、ミラー電子顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図9において、構成要素1から38は、第1の実施形態によるウエハ検査装置(図1)と同じものである。ただし、第3の実施形態によるウエハ検査装置は、第1の実施形態のウエハ検査装置(図1)とは異なり、高さセンサが2台設置されており、観測位置のステージ進行方向の少なくとも2点の高さを測定することが可能となっている。なお、本実施形態では、2つの高さセンサを設けた例を示したが、3つ以上の高さセンサを設け、それぞれの測定結果に基づいて観測面300を近似してもよい。
<ウエハ検査装置の構成例>
図9は、第3の実施形態による、ミラー電子顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図9において、構成要素1から38は、第1の実施形態によるウエハ検査装置(図1)と同じものである。ただし、第3の実施形態によるウエハ検査装置は、第1の実施形態のウエハ検査装置(図1)とは異なり、高さセンサが2台設置されており、観測位置のステージ進行方向の少なくとも2点の高さを測定することが可能となっている。なお、本実施形態では、2つの高さセンサを設けた例を示したが、3つ以上の高さセンサを設け、それぞれの測定結果に基づいて観測面300を近似してもよい。
<2点高さ測定の動作>
図10は、2点の高さを測定することで、観測面演算処理を説明するための図である。図10において、高さセンサ3aと高さセンサ3bは観測位置よりも前の距離Xだけ離れた2点をそれぞれ測定して、その2点を直線で近似した観測面300を撮像光学系制御装置10において演算する。ウエハ9がステージ進行方向19に移動させ、演算した観測面300のデータを前もって用意する。このようにすることにより、画像撮像中に高さを測定しながら演算する回数を減少させることができる。
図10は、2点の高さを測定することで、観測面演算処理を説明するための図である。図10において、高さセンサ3aと高さセンサ3bは観測位置よりも前の距離Xだけ離れた2点をそれぞれ測定して、その2点を直線で近似した観測面300を撮像光学系制御装置10において演算する。ウエハ9がステージ進行方向19に移動させ、演算した観測面300のデータを前もって用意する。このようにすることにより、画像撮像中に高さを測定しながら演算する回数を減少させることができる。
距離Xを小さく設定すればする程、観測面300を直線で近似した高さ誤差Yを小さくできるが、演算回数が多くなる。図10に示したウエハ9の高さ変動の大きさをa、周期をTと仮定する。その時の高さ誤差YはXがTよりも小さい場合は、式(10)のように見積もることができる。
Y ≒ a・(X/T) ・・・ (10)
式(10)より、誤差Yよりも小さい誤差とするための距離Xの条件は、式(11)のようになる。
X < Y・T/a ・・・ (11)
Y ≒ a・(X/T) ・・・ (10)
式(10)より、誤差Yよりも小さい誤差とするための距離Xの条件は、式(11)のようになる。
X < Y・T/a ・・・ (11)
例えば、光学倍率65倍のミラー電子顕微鏡の場合、高さが100μm程度変化すると光学倍率が1%程度変化する。この場合、高さの許容値は、M=N=1024のTDIカメラ1では19.5μm以下であった。高さの誤差Yを高さの許容値と考えて、Y=19.5μmとする。周期Tを直径150mmのウエハの中央が100μm反っていると仮定し、T=150mm、a=100μmとすると、式(11)よりX<19.5・150/100=29.3mmとなり、29.3mmよりも距離Xを小さくすれば良いことが分かる。
なお、本実施形態では、上述の観測面300を得る演算を、ステージ2が距離Xだけ移動する度に実行するようにしているが、例えば、ステージ2が距離2X移動する度に観測面300を演算計算して求めた観測面を2Xの距離で活用することとしてもよい。
(4)第4の実施形態
図11は、第4の実施形態による、光学顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図11において、構成要素1から38は第1の実施形態によるウエハ検査装置(図1)と同じものである。第4の実施形態によるウエハ検査装置は、第1の実施形態によるウエハ検査装置が電子線を当てて観測するのとは異なり、光源53により光54をウエハ9上に照射して、その反射光52を集光レンズ50によりTDIカメラ1のウィンドウ60を経由してCCDラインセンサ13上に集光させることでウエハ9を観測する。
図11は、第4の実施形態による、光学顕微鏡を用いたウエハ検査装置の断面構成例を示す図である。図11において、構成要素1から38は第1の実施形態によるウエハ検査装置(図1)と同じものである。第4の実施形態によるウエハ検査装置は、第1の実施形態によるウエハ検査装置が電子線を当てて観測するのとは異なり、光源53により光54をウエハ9上に照射して、その反射光52を集光レンズ50によりTDIカメラ1のウィンドウ60を経由してCCDラインセンサ13上に集光させることでウエハ9を観測する。
光源53としては、例えば、高い光学倍率で撮像するためには色収差を極力無くすために単一波長の光源とすることが望ましい。このため、光源53の出口にバンドパスフィルタを用いて波長を制限するか、LD光源、レーザ光源、X線源等を用いることが望ましい。
第4の実施形態によるウエハ検査装置は、上述した構成以外については、第1の実施形態によるウエハ検査装置と同様の構成を備えており、第2から第4の実施形態による機能や構成を適用することも可能であり、同様に効果的である。
(5)まとめ
(i)本実施形態では、撮像光学系制御装置10が、少なくとも1つの高さセンサ3によって測定されたウエハ9の表面の高さに基づいて、光学的観察部(5および16、あるいは50および53)の光学倍率を変化させてウエハの表面に焦点を合わせ、カメラ制御装置(TDIカメラ制御装置11)が、光学倍率とステージ2の位置に基づいて、画像検出素子(TDIカメラ1のCCDラインセンサ13)の切り替えタイミングを補正する。このようにすることにより、ウエハの反りや段差等による高さ変動がある観察対象に対しても画質の劣化を抑制し、高画質な観察画像を取得することができるようになる。
(i)本実施形態では、撮像光学系制御装置10が、少なくとも1つの高さセンサ3によって測定されたウエハ9の表面の高さに基づいて、光学的観察部(5および16、あるいは50および53)の光学倍率を変化させてウエハの表面に焦点を合わせ、カメラ制御装置(TDIカメラ制御装置11)が、光学倍率とステージ2の位置に基づいて、画像検出素子(TDIカメラ1のCCDラインセンサ13)の切り替えタイミングを補正する。このようにすることにより、ウエハの反りや段差等による高さ変動がある観察対象に対しても画質の劣化を抑制し、高画質な観察画像を取得することができるようになる。
(ii)第1から第3の実施形態では、上記光学的観察部として、例えば、電子源20と、電子源20から面状の入射電子線をウエハ9上に照射する照射光学系16と、ウエハ9の表面上に負電位を印加する負電位印加電源17と、ウエハ9の表面上に形成された負電位によって反射した反射電子線を集光する集光光学系(撮像光学系5)と、集光光学系で集光して光を電気信号に変換する蛍光板6と、を備えるミラー電子顕微鏡を用いることができる。このようにすることにより、高さ変動に対応しつつ、ウエハ9の表面全体を検査することができ、検査の高速化を実現でき、異物や欠陥を精度良く認識することができるようになる。
(iii)また、第4の実施形態では、上記光学的観察部として、例えば、光源53と、光源53から放射された光をウエハ9上に照射する照射部(図示しない照射光学系)と、ウエハ9の表面で反射された反射光を集光する集光レンズ50と、を備える、集光した光を観測する光学顕微鏡を用いることができる。このようにすることにより、比較的簡単な構成で、高さ変動に対応しつつ、ウエハ9の表面全体を検査することができるようになる。
(iv)さらに、本実施形態では、カメラ制御装置(TDIカメラ制御装置11)は、光学的観察部の光学倍率の変化が1%以下となるように、画像検出素子(CCDラインセンサ13)の切り替えタイミングを補正する。このようにすることにより、取得する画像において、視野が急激に変化することを防止することができる。
(v)第2の実施形態では、ウエハ検査装置は、ウエハ9の表面の高さデータを蓄えるバッファー110を備え、過去に検査した際に取得したウエハ9の高さデータを一時的に格納する。この場合、カメラ制御装置(TDIカメラ制御装置11)は、ウエハ9の表面の観測位置をずらしながらウエハ9の上を往復して検査する軌跡(図8参照)として、バッファー110に蓄えられた、過去の高さデータを用いて、画像検出素子(CCDラインセンサ13)の切り替えタイミングを補正する。このようにすることにより、画像撮像中にウエハ9の高さを測定しながら切り替えタイミングを演算する必要がなくなり、処理の高速化を実現することができる。
(vi)第3の実施形態では、少なくとも2つのウエハ高さセンサ3aおよび3bを設けている。この場合、少なくとも2つのウエハ高さセンサ3aおよび3bを用いて、ウエハ9の表面の高さを少なくとも2点観測し、撮像光学系制御装置10は、観測した少なくとも2点の高さデータに基づいて、ウエハ9の表面を傾いた近似平面で推測する。そして、カメラ制御装置(TDIカメラ制御装置11)は、ウエハ9の表面の高さが推測した近似平面高さとなるように、画像検出素子(CCDラインセンサ13)の切り替えタイミングを補正する。このように、近似平面を用いて高さを推定するので、高さの測定回数を減らすことができ、処理の高速化を実現することができる。
1 TDIカメラ
2 ステージ
3 高さセンサ
4 レーザ干渉計
5 撮像光学系
6 蛍光板
7 ステージ駆動装置
8 ステージ制御装置
9 ウエハ
10 撮像光学系制御装置
11 TDIカメラ制御装置
12 全体制御装置
13 CCDラインセンサ
14 光学レンズ
15 レンズ
16 照射光学系
17 負電位印加電源
19 ステージ進行方向
20 電子源
21 入射電子線
22 反射電子線
30 ステージ位置指令
31 位置制御信号
32 ステージ位置データ
33 高さデータ
34 光学倍率データ
35 ライン切り替え信号
36 画像ON-OFF信号
37 画像データ
38 撮像光学系制御信号
39 CCD画素
40 電荷移動
50 集光レンズ
51 視野
52 反射光
53 光源
54 光
60 ウィンドウ
101 転写距離
102 移動距離
110 バッファー
111 軌跡
300 観測面
2 ステージ
3 高さセンサ
4 レーザ干渉計
5 撮像光学系
6 蛍光板
7 ステージ駆動装置
8 ステージ制御装置
9 ウエハ
10 撮像光学系制御装置
11 TDIカメラ制御装置
12 全体制御装置
13 CCDラインセンサ
14 光学レンズ
15 レンズ
16 照射光学系
17 負電位印加電源
19 ステージ進行方向
20 電子源
21 入射電子線
22 反射電子線
30 ステージ位置指令
31 位置制御信号
32 ステージ位置データ
33 高さデータ
34 光学倍率データ
35 ライン切り替え信号
36 画像ON-OFF信号
37 画像データ
38 撮像光学系制御信号
39 CCD画素
40 電荷移動
50 集光レンズ
51 視野
52 反射光
53 光源
54 光
60 ウィンドウ
101 転写距離
102 移動距離
110 バッファー
111 軌跡
300 観測面
Claims (10)
- ウエハを載置し、移動させるステージと、
前記ウエハの表面を光学的に観察する光学的観察部と、
移動する前記ステージに載置された前記ウエハの表面を観測して得られる光信号を電気信号に変換する時間延滞積分型の画像検出素子を有するTDIカメラと、
前記ステージの位置を検出するステージ位置検出器と、
前記ウエハの表面の高さを測定する、少なくとも1つの高さセンサと、
前記光学的観察部を制御する撮像光学系制御装置と、
前記TDIカメラを制御するカメラ制御装置と、を備え、
前記撮像光学系制御装置は、前記少なくとも1つの高さセンサによって測定された前記ウエハの表面の高さに基づいて、前記光学的観察部の光学倍率を変化させて前記ウエハの表面に焦点を合わせ、
前記カメラ制御装置は、前記光学倍率と前記ステージの位置に基づいて、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査装置。 - 請求項1において、
前記光学的観察部は、電子源と、前記電子源から面状の入射電子線をウエハ上に照射する照射光学系と、前記ウエハの表面上に負電位を印加する負電位印加電源と、前記ウエハの表面上に形成された負電位によって反射した反射電子線を集光する集光光学系と、前記集光光学系で集光して光を電気信号に変換する蛍光板と、を備えるミラー電子顕微鏡である、ウエハ検査装置。 - 請求項1において、
前記光学的観察部は、光源と、前記光源から放射された光をウエハ上に照射する照射部と、前記ウエハの表面で反射された反射光を集光する集光レンズと、を備え、前記集光した光を観測する光学顕微鏡である、ウエハ検査装置。 - 請求項1において、
前記カメラ制御装置は、前記光学的観察部の光学倍率の変化が1%以下となるように、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査装置。 - 請求項1において、
さらに、前記ウエハの表面の高さデータを蓄えるバッファーを備え、
前記カメラ制御装置は、前記ウエハの表面の観測位置をずらしながら前記ウエハの上を往復して検査する軌跡として、前記バッファーに蓄えられた、過去の高さデータを用いて、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査装置。 - 請求項1において、
少なくとも2つの高さセンサを備え、
前記少なくとも2つの高さセンサは、前記ウエハの表面の高さを少なくとも2点観測し、
前記撮像光学系制御装置は、少なくとも2点観測された高さのデータに基づいて、前記ウエハの表面を傾いた近似平面で推測し、
前記カメラ制御装置は、前記ウエハの表面の高さが前記推測した近似平面高さとなるように、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査装置。 - 光学的観察部が、ステージの上に載置したウエハの表面を光学的に観察することと、
時間延滞積分型の画像検出素子が、前記ウエハの表面を観測して得られる光信号を電気信号に変換することと、
ステージ位置検出器が、前記ステージの位置を検出することと、
少なくとも1つの高さセンサが、前記ウエハの表面の高さを測定することと、
前記光学的観察部を制御する撮像光学系制御装置が、前記少なくとも1つの高さセンサによって測定された前記ウエハの表面の高さに基づいて、前記光学的観察部の光学倍率を変化させて前記ウエハの表面に焦点を合わせることと、
前記画像検出素子を有するTDIカメラを制御するカメラ制御装置が、前記光学倍率と前記ステージの位置に基づいて、前記画像検出素子の切り替えタイミングを補正することと、
を含む、ウエハ検査方法。 - 請求項7において、
前記カメラ制御装置は、前記光学的観察部の光学倍率の変化が1%以下となるように、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査方法。 - 請求項7において、
さらに、バッファーに前記ウエハの表面の高さデータを格納することを含み、
前記カメラ制御装置は、前記ウエハの表面の観測位置をずらしながら前記ウエハの上を往復して検査する軌跡として、前記バッファーに蓄えられた、過去の高さデータを用いて、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査方法。 - 請求項7において、さらに、
少なくとも2つの高さセンサが、前記ウエハの表面の高さを少なくとも2点観測することと、
前記撮像光学系制御装置が、前記少なくとも2点の高さのデータを用いて、前記ウエハの表面を傾いた近似平面で推測することと、を含み、
前記カメラ制御装置は、前記ウエハの表面の高さが前記推測した近似平面高さとなるように、前記画像検出素子の切り替えタイミングを補正する、ウエハ検査方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/981,769 US11342211B2 (en) | 2018-05-30 | 2018-05-30 | Wafer inspection apparatus and wafer inspection method |
| JP2020522449A JP7060687B2 (ja) | 2018-05-30 | 2018-05-30 | ウエハ検査装置およびウエハ検査方法 |
| CN201880093447.4A CN112119297A (zh) | 2018-05-30 | 2018-05-30 | 晶片检查装置和晶片检查方法 |
| DE112018007301.7T DE112018007301B4 (de) | 2018-05-30 | 2018-05-30 | Waferuntersuchungseinrichtung und Waferuntersuchungsverfahren |
| PCT/JP2018/020719 WO2019229871A1 (ja) | 2018-05-30 | 2018-05-30 | ウエハ検査装置およびウエハ検査方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/020719 WO2019229871A1 (ja) | 2018-05-30 | 2018-05-30 | ウエハ検査装置およびウエハ検査方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019229871A1 true WO2019229871A1 (ja) | 2019-12-05 |
Family
ID=68697874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/020719 WO2019229871A1 (ja) | 2018-05-30 | 2018-05-30 | ウエハ検査装置およびウエハ検査方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11342211B2 (ja) |
| JP (1) | JP7060687B2 (ja) |
| CN (1) | CN112119297A (ja) |
| DE (1) | DE112018007301B4 (ja) |
| WO (1) | WO2019229871A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113948414B (zh) * | 2021-10-19 | 2024-02-09 | 无锡卓海科技股份有限公司 | 一种薄膜应力仪自动调平装置 |
| CN115079045B (zh) * | 2022-06-10 | 2023-05-02 | 郴州恒维电子股份有限公司 | 一种前工序图像自动检测短断路装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11135056A (ja) * | 1997-11-04 | 1999-05-21 | Nikon Corp | 検査装置 |
| JPH11250847A (ja) * | 1998-02-27 | 1999-09-17 | Hitachi Ltd | 収束荷電粒子線装置およびそれを用いた検査方法 |
| JP2003177101A (ja) * | 2001-09-13 | 2003-06-27 | Hitachi Ltd | 欠陥検査方法及びその装置並びに撮像方法及びその装置 |
| JP2005235777A (ja) * | 2001-01-10 | 2005-09-02 | Ebara Corp | 電子線による検査装置、検査方法、及びその検査装置を用いたデバイス製造方法 |
| JP2007051902A (ja) * | 2005-08-17 | 2007-03-01 | Hitachi High-Technologies Corp | 写像投影型電子線式検査装置及びその方法 |
| JP2010073507A (ja) * | 2008-09-19 | 2010-04-02 | Hitachi High-Technologies Corp | 走査型電子顕微鏡装置およびその焦点あわせ方法 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11149895A (ja) * | 1997-08-11 | 1999-06-02 | Hitachi Ltd | 電子線式検査または測定装置およびその方法、高さ検出装置並びに電子線式描画装置 |
| US6335532B1 (en) | 1998-02-27 | 2002-01-01 | Hitachi, Ltd. | Convergent charged particle beam apparatus and inspection method using same |
| JPH11311608A (ja) * | 1998-04-28 | 1999-11-09 | Nikon Corp | 検査装置 |
| US6831998B1 (en) * | 2000-06-22 | 2004-12-14 | Hitachi, Ltd. | Inspection system for circuit patterns and a method thereof |
| JP4942240B2 (ja) | 2000-08-09 | 2012-05-30 | 大日本印刷株式会社 | クレジットカードを用いた決済処理方法 |
| EP1319244A1 (en) * | 2000-09-20 | 2003-06-18 | Kla-Tencor Inc. | Methods and systems for semiconductor fabrication processes |
| US6992290B2 (en) * | 2001-01-10 | 2006-01-31 | Ebara Corporation | Electron beam inspection system and inspection method and method of manufacturing devices using the system |
| US7127098B2 (en) | 2001-09-13 | 2006-10-24 | Hitachi, Ltd. | Image detection method and its apparatus and defect detection method and its apparatus |
| US6917421B1 (en) * | 2001-10-12 | 2005-07-12 | Kla-Tencor Technologies Corp. | Systems and methods for multi-dimensional inspection and/or metrology of a specimen |
| JP3986801B2 (ja) | 2001-11-09 | 2007-10-03 | 株式会社ニコン | 表面状態観察装置及び方法並びに半導体素子及びマイクロデバイスの製造方法 |
| US7126699B1 (en) * | 2002-10-18 | 2006-10-24 | Kla-Tencor Technologies Corp. | Systems and methods for multi-dimensional metrology and/or inspection of a specimen |
| US7176459B2 (en) | 2003-12-25 | 2007-02-13 | Ebara Corporation | Electron beam apparatus |
| JP2005249745A (ja) * | 2004-03-08 | 2005-09-15 | Ebara Corp | 試料表面検査方法および検査装置 |
| US7697727B2 (en) * | 2005-05-23 | 2010-04-13 | Board Of Regents, The University Of Texas System | Automated surface distress measurement system |
| JP2007124278A (ja) * | 2005-10-28 | 2007-05-17 | Nikon Corp | 撮像装置 |
| US7551272B2 (en) * | 2005-11-09 | 2009-06-23 | Aceris 3D Inspection Inc. | Method and an apparatus for simultaneous 2D and 3D optical inspection and acquisition of optical inspection data of an object |
| US20090309022A1 (en) * | 2008-06-12 | 2009-12-17 | Hitachi High-Technologies Corporation | Apparatus for inspecting a substrate, a method of inspecting a substrate, a scanning electron microscope, and a method of producing an image using a scanning electron microscope |
| US9958561B2 (en) * | 2009-08-20 | 2018-05-01 | The Curators Of The University Of Missouri | Apparatus and method for the determination of one or more neutron source characteristics |
| US9880089B2 (en) * | 2010-08-31 | 2018-01-30 | Complete Genomics, Inc. | High-density devices with synchronous tracks for quad-cell based alignment correction |
| US9488823B2 (en) * | 2012-06-07 | 2016-11-08 | Complete Genomics, Inc. | Techniques for scanned illumination |
| US9528915B2 (en) * | 2012-11-13 | 2016-12-27 | Ues, Inc. | Automated high speed metallographic system |
| US9587936B2 (en) * | 2013-03-14 | 2017-03-07 | Kla-Tencor Corporation | Scanning inspection system with angular correction |
| JP6214903B2 (ja) | 2013-04-10 | 2017-10-18 | 株式会社日立ハイテクノロジーズ | 検査装置 |
| US9689804B2 (en) * | 2013-12-23 | 2017-06-27 | Kla-Tencor Corporation | Multi-channel backside wafer inspection |
| US20160249230A1 (en) * | 2015-02-20 | 2016-08-25 | Harris Corporation | Adaptive network optimization in overlap zone in a simulcast system |
| JP6462843B1 (ja) * | 2017-12-28 | 2019-01-30 | レーザーテック株式会社 | 検出方法、検査方法、検出装置及び検査装置 |
-
2018
- 2018-05-30 DE DE112018007301.7T patent/DE112018007301B4/de active Active
- 2018-05-30 WO PCT/JP2018/020719 patent/WO2019229871A1/ja active Application Filing
- 2018-05-30 JP JP2020522449A patent/JP7060687B2/ja active Active
- 2018-05-30 US US16/981,769 patent/US11342211B2/en active Active
- 2018-05-30 CN CN201880093447.4A patent/CN112119297A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11135056A (ja) * | 1997-11-04 | 1999-05-21 | Nikon Corp | 検査装置 |
| JPH11250847A (ja) * | 1998-02-27 | 1999-09-17 | Hitachi Ltd | 収束荷電粒子線装置およびそれを用いた検査方法 |
| JP2005235777A (ja) * | 2001-01-10 | 2005-09-02 | Ebara Corp | 電子線による検査装置、検査方法、及びその検査装置を用いたデバイス製造方法 |
| JP2003177101A (ja) * | 2001-09-13 | 2003-06-27 | Hitachi Ltd | 欠陥検査方法及びその装置並びに撮像方法及びその装置 |
| JP2007051902A (ja) * | 2005-08-17 | 2007-03-01 | Hitachi High-Technologies Corp | 写像投影型電子線式検査装置及びその方法 |
| JP2010073507A (ja) * | 2008-09-19 | 2010-04-02 | Hitachi High-Technologies Corp | 走査型電子顕微鏡装置およびその焦点あわせ方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112119297A (zh) | 2020-12-22 |
| JPWO2019229871A1 (ja) | 2021-03-25 |
| US20210118710A1 (en) | 2021-04-22 |
| JP7060687B2 (ja) | 2022-04-26 |
| DE112018007301B4 (de) | 2023-11-30 |
| DE112018007301T5 (de) | 2021-02-18 |
| US11342211B2 (en) | 2022-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20060284088A1 (en) | Focus correction method for inspection of circuit patterns | |
| KR101469403B1 (ko) | 하전 입자선 장치 | |
| US6570156B1 (en) | Autoadjusting electron microscope | |
| TWI462143B (zh) | 動態調整電子束影像之聚焦之方法、動態量測欲檢測樣本之高度變化之裝置、電子束裝置、調整電子束之焦距之裝置 | |
| JP6788660B2 (ja) | 欠陥検査装置 | |
| JP2008529065A (ja) | トラッキングオートフォーカスシステム | |
| TWI749481B (zh) | 自動聚焦帶電粒子束於樣本的表面區上的方法、計算帶電粒子束裝置的影像的銳利度值的收斂集合的方法、及用以攝像樣本的帶電粒子束裝置 | |
| JP2017003404A (ja) | 欠陥検査方法および装置 | |
| WO2019229871A1 (ja) | ウエハ検査装置およびウエハ検査方法 | |
| JP6145133B2 (ja) | 荷電粒子線装置 | |
| JP4164470B2 (ja) | 走査電子顕微鏡 | |
| JP6957633B2 (ja) | 評価用半導体基板およびそれを用いた検査装置の欠陥検出感度評価方法 | |
| JP6310864B2 (ja) | 検査装置 | |
| JP2007200784A (ja) | 試料ドリフト補正装置、これを備えた結像光学システム、及び試料ドリフト補正方法 | |
| JP6214903B2 (ja) | 検査装置 | |
| JP2010244740A (ja) | レビュー装置、及びレビュー方法 | |
| WO2022219667A1 (ja) | 欠陥検査装置 | |
| JP5373463B2 (ja) | 透過型電子顕微鏡の自動最適合焦点調整装置 | |
| JP5881445B2 (ja) | 顕微鏡 | |
| US20230073435A1 (en) | Image processing apparatus and image processing method | |
| JPWO2018173241A1 (ja) | 荷電粒子線装置、及び荷電粒子線装置の調整方法 | |
| JP4505674B2 (ja) | パターン検査方法 | |
| TW202247223A (zh) | 掃描電子顯微鏡的自動對焦方法及圖像生成裝置 | |
| JP2020153727A (ja) | 検査装置 | |
| JP2006100049A (ja) | 電子線式検査装置とその検査方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18920934 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020522449 Country of ref document: JP Kind code of ref document: A |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18920934 Country of ref document: EP Kind code of ref document: A1 |