WO2019078088A1 - 変速機 - Google Patents
変速機 Download PDFInfo
- Publication number
- WO2019078088A1 WO2019078088A1 PCT/JP2018/037958 JP2018037958W WO2019078088A1 WO 2019078088 A1 WO2019078088 A1 WO 2019078088A1 JP 2018037958 W JP2018037958 W JP 2018037958W WO 2019078088 A1 WO2019078088 A1 WO 2019078088A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- planetary
- rotation
- transmission
- central axis
- shaft
- Prior art date
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H13/00—Gearing for conveying rotary motion with constant gear ratio by friction between rotary members
- F16H13/06—Gearing for conveying rotary motion with constant gear ratio by friction between rotary members with members having orbital motion
- F16H13/08—Gearing for conveying rotary motion with constant gear ratio by friction between rotary members with members having orbital motion with balls or with rollers acting in a similar manner
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H13/00—Gearing for conveying rotary motion with constant gear ratio by friction between rotary members
- F16H13/10—Means for influencing the pressure between the members
- F16H13/14—Means for influencing the pressure between the members for automatically varying the pressure mechanically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
Definitions
- the present invention relates to a transmission.
- Japanese Patent Laid-Open No. 2001-304350 discloses a reduction gear using a traction drive.
- the reduction gear of this publication is a combination of a planetary gear and a traction drive. Then, the traction drive is disposed on the input side. The rotational power decelerated by the traction drive is further decelerated by the planetary gear device and output.
- an object of the present invention is to provide a transmission capable of improving back drivability.
- a transmission comprising an input shaft and an output shaft extending along a central axis and rotating about the central axis, wherein the output shaft is rotated at a speed different from that of the input shaft, A first rotation mechanism and a second rotation mechanism that shift the rotation of the input shaft and transmit it to the output shaft, and the first rotation mechanism is a sun roller that rotates integrally with the input shaft; A plurality of planet rollers disposed around the sun roller and supporting the rotation axes of the plurality of planet rollers that rotate around the rotation axis and the plurality of planet rollers that rotate along the rotation of the sun roller A planetary roller support portion that rotates around a central axis as the planetary roller revolves, and a rotation transmission shaft that rotates around the central axis together with the planetary roller support portion, wherein the second rotation mechanism A sun gear that rotates integrally with a rotation transmission shaft, a plurality of planet gears that are disposed around the sun gear so as to be rotatable around a rotation
- rolling resistance is reduced and back drivability is improved by pressing the planetary roller against the sun roller with a necessary minimum load by the pressure adjustment mechanism. Therefore, it is possible to finely adjust the input side (motor) according to the load of the output shaft.
- FIG. 1 is a cross-sectional view of a transmission.
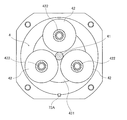
- FIG. 2 is a cross-sectional view taken along line II-II of FIG.
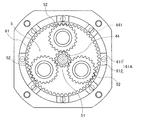
- FIG. 3 is a cross-sectional view taken along line III-III of FIG.
- FIG. 4 is a side view of the cam viewed from the radial direction.
- FIG. 5 is a diagram for explaining the operation of the pressure control mechanism.
- FIG. 6 is a diagram for explaining the operation of the pressure control mechanism.
- FIG. 7 is a diagram for explaining the operation of the pressure control mechanism.
- FIG. 8 is a partial cross-sectional view of a transmission of a modification.
- a direction parallel to the central axis of the transmission is "axial direction”
- a direction perpendicular to the central axis of the transmission is “radial direction”
- a direction along an arc centered on the central axis of the transmission is “axial direction”. It is referred to as “circumferential direction”.
- the “parallel direction” also includes a substantially parallel direction.
- the “orthogonal direction” also includes a substantially orthogonal direction.
- FIG. 1 is a cross-sectional view of the transmission 1.
- FIG. 2 is a cross-sectional view taken along line II-II of FIG.
- FIG. 3 is a cross-sectional view taken along line III-III of FIG.
- the transmission 1 of the present embodiment is used, for example, in a robot.
- the transmission 1 shifts the rotational movement of the drive motor of the robot and transmits it to the arm.
- the arm turns at a rotational speed changed by the transmission 1.
- the transmission 1 includes an input shaft 2 and an output shaft 3.
- the input shaft 2 and the output shaft 3 extend along the central axis 91 and rotate around the central axis 91.
- the transmission 1 rotates the output shaft 3 at a speed different from that of the input shaft 2.
- the transmission 1 includes a first rotation mechanism 4, a second rotation mechanism 5, a pressure adjustment mechanism 6, and a casing 7.
- the first rotation mechanism 4 and the second rotation mechanism 5 shift the rotation of the input shaft 2 and transmit the rotation to the output shaft 3.
- the casing 7 surrounds the central axis 91 and accommodates the first rotation mechanism 4 and the second rotation mechanism 5 therein.
- the casing 7 is non-rotatably fixed.
- the casing 7 has a shaft holding portion 71, a lid portion 72, and a side portion 73.
- the shaft holding portion 71 is a cylindrical member surrounding the central shaft 91.
- the lid portion 72 is a member which spreads radially outward from the shaft holding portion 71.
- the side portion 73 is a member extending along the axial direction from the radially outer end of the lid 72.
- the first rotation mechanism 4 described later has a sun roller 41 that rotates integrally with the input shaft 2.
- the shaft holding portion 71 holds the sun roller 41 via the bearing 81.
- the bearing 81 is, for example, a ball bearing. The bearing 81 enables the input shaft 2 and the sun roller 41 to rotate around the central axis 91 with respect to the casing 7.
- the second rotation mechanism 5 also has a planetary gear support 53 that rotates integrally with the output shaft 3.
- the side 73 holds the planetary gear support 53 via a bearing 82.
- the bearing 82 is, for example, a ball bearing. The bearing 82 enables the output shaft 3 and the planetary gear support 53 to rotate relative to the casing 7 about the central axis 91.
- the first rotation mechanism 4 has a sun roller 41, three planet rollers 42, a first planet roller support portion 431 and a second planet roller support portion 432, and a rotation transmission shaft 44.
- the sun roller 41 extends along the central axis 91 and rotates integrally with the input shaft 2 around the central axis 91.
- the sun roller 41 is rotatably supported by the shaft holding portion 71 of the casing 7 as described above.
- Three planet rollers 42 are arranged around the sun roller 41.
- the three planet rollers 42 are supported rotatably around a rotation shaft 92 by a first planetary roller support 431 and a second planetary roller support 432 described later, and rotatably supported around a central axis 91 Be done.
- the outer circumferential surface of each of the three planet rollers 42 contacts the outer circumferential surface of the sun roller 41.
- each of the three planet rollers 42 revolves around the central axis 91 while rotating on the rotation axis 92 as the sun roller 41 rotates.
- Each of the three planet rollers 42 has a first cylindrical portion 421 and a second cylindrical portion 422.
- the first cylindrical portion 421 surrounds the rotation shaft 92 and protrudes toward the output shaft 3 in the axial direction.
- the first cylindrical portion 421 has a conical shape whose diameter decreases toward the output shaft 3 side.
- the second cylindrical portion 422 surrounds the rotation shaft 92 and protrudes toward the input shaft 2 in the axial direction.
- the second cylindrical portion 422 has a conical shape whose diameter decreases toward the input shaft 2 side.
- the first planetary roller support portion 431 is circular when viewed from the axial direction.
- the first planetary roller support portion 431 is disposed closer to the output shaft 3 than the sun roller 41 and the planetary roller 42 in the axial direction.
- the first planetary roller support portion 431 inserts and fixes the rotation shaft 92 of each of the three planetary rollers 42.
- the first planetary roller support 431 supports each of the three planetary rollers 42.
- the first planetary roller support portion 431 supports each of the three planetary rollers 42 rotatably around the rotation shaft 92.
- the first planetary roller support portion 431 rotates about the central axis 91 as the three planetary rollers 42 revolve.
- the second planetary roller support portion 432 has an annular shape as viewed from the axial direction.
- the second planetary roller support portion 432 is disposed closer to the input shaft 2 than the sun roller 41 and the planetary roller 42 in the axial direction. That is, the first planetary roller support portion 431 and the second planetary roller support portion 432 are disposed to face each other with the sun roller 41 and the planetary roller 42 interposed therebetween in the axial direction.
- the second planetary roller support portion 432 inserts and fixes the rotation shaft 92 of each of the three planetary rollers 42. Specifically, the second planetary roller support 432 supports each of the three planetary rollers 42. At this time, the second planetary roller support portion 432 supports each of the three planetary rollers 42 rotatably around the rotation shaft 92.
- the second planetary roller support portion 432 surrounds the shaft holding portion 71 of the casing 7.
- a bearing 83 is provided between the second planetary roller support portion 432 and the shaft holding portion 71.
- the bearing 83 is, for example, a ball bearing.
- the second planetary roller support portion 432 is rotatable relative to the shaft holding portion 71 by the bearing 83.
- the first planetary roller support portion 431 rotates about the central axis 91 as the three planetary rollers 42 revolve.
- the rotation transmission shaft 44 has a cylindrical shape extending along the central axis 91.
- the rotation transmission shaft 44 is provided on the first planetary roller support portion 431, and rotates with the first planetary roller support portion 431 around the central axis 91. That is, the rotation transmission shaft 44 rotates around the central axis 91 as the three planetary rollers 42 revolve.
- a support plate 531 of a planetary gear support 53 described later is supported at an end portion on the output shaft 3 side of the rotation transmission shaft 44 via a bearing 84.
- Each of the first planetary roller support 431, the second planetary roller support 432, the rotation transmission shaft 44 and the rotation shaft 92 of the first rotation mechanism 4 is integrally supported by the bearing 83 and the bearing 84.
- the second rotation mechanism 5 includes a sun gear 51, three planet gears 52, and a planet gear support 53.
- the sun gear 51 is provided on the rotation transmission shaft 44 of the first rotation mechanism 4.
- the sun gear 51 rotates integrally with the rotation transmission shaft 44 about the central axis 91.
- Each of the three planet gears 52 is disposed around the sun gear 51.
- Each of the three planetary gears 52 is rotatably supported about a rotational shaft 93 by a planetary gear support 53 described later, and supported so as to revolve around a central shaft 91.
- the three planet gears 52 mesh with the sun gear 51.
- each of the three planetary gears 52 revolves around the central axis 91 while rotating on the rotation axis 93 as the sun gear 51 rotates.
- the planetary gear support 53 has a support plate 531 and a rotating shaft 532.
- the support plate 531 is circular when viewed from the axial direction.
- the support plate 531 is disposed closer to the output shaft 3 than the sun gear 51 and the planetary gear 52 in the axial direction.
- the support plate 531 supports the rotation shaft 93 of each of the three planetary gears 52.
- the support plate 531 rotatably supports each of the three planetary gears 52 around the rotation shaft 93.
- the rotation transmission shaft 44 is supported by the support plate 531 via the bearing 84.
- the bearing 84 is, for example, a ball bearing.
- the support plate 531 rotates about the central axis 91 as the three planetary gears 52 revolve.
- the rotation axis 532 is a cylindrical shape extending along the central axis 91.
- the rotation shaft 532 is provided on the support plate 531 and rotates around the central axis 91 together with the support plate 531.
- the rotating shaft 532 is rotatably supported on the side 73 of the casing 7 via a bearing 82.
- the output shaft 3 is provided on the rotating shaft 532. Then, the output shaft 3 rotates relative to the casing 7 integrally with the rotation shaft 532 around the central shaft 91.
- the pressure adjustment mechanism 6 is a mechanism that generates a pressing force that presses the plurality of planetary rollers 42 radially inward.
- the pressure control mechanism 6 is disposed radially inward of the side portion 73 of the casing 7.
- the pressure control mechanism 6 has an internal gear 61, a first annular member 62, a second annular member 63, a cam 64, and a spring 65.
- the internal gear 61 is disposed radially outside of the three planetary gears 52 as shown in FIGS. 1 and 3.
- the internal gear 61 is rotatable about a central axis 91 and meshes with the three planet gears 52.
- the internal gear 61 rotates around the central axis 91 by meshing with the three planetary gears 52.
- the rotation angle of the internal gear 61 in the circumferential direction is small.
- the internal gear 61 rotates to such an extent that the rolling element 641 does not come off from the first recess 61A and the second recess 62A, which will be described later with reference to FIG.
- the first annular member 62 and the second annular member 63 are annular members surrounding the central axis 91 when viewed from the axial direction.
- the first annular member 62 and the second annular member 63 are provided on the inner peripheral surface of the side portion 73 by the key 73A so as not to rotate about the central axis 91.
- the first annular member 62 and the second annular member 63 are axially aligned with the internal gear 61, and are disposed closer to the input shaft 2 than the internal gear 61 is.
- the first annular member 62 is disposed radially outward of the first cylindrical portion 421 so as to be axially displaceable. Further, the first annular member 62 axially faces the internal gear 61. A cam 64 described later is provided between the internal gear 61 and the first annular member 62.
- the inner circumferential surface of the first annular member 62 abuts on the outer circumferential surface of the first cylindrical portion 421 of the planetary roller 42.
- the inner circumferential surface of the first annular member 62 is an example of the “first contact portion” in the present application.
- the second annular member 63 is disposed radially outward of the second cylindrical portion 422 so as to be axially displaceable. Further, the second annular member 63 is opposed to the first annular member 62 in the axial direction, and the planetary roller 42 is interposed between the first annular member 62 and the second annular member 63.
- the inner circumferential surface of the second annular member 63 abuts on the outer circumferential surface of the second cylindrical portion 422 of the planetary roller 42.
- the inner circumferential surface of the second annular member 63 is an example of the “second contact portion” in the present application.
- FIG. 4 is a side view of the cam 64 viewed from the radial direction.
- FIG. 4 is a view showing the internal gear 61 not rotating.
- the cam 64 has a first recess 61A provided in the internal gear 61, a second recess 62A provided in the first annular member 62, and a rolling element 641.
- the first recess 61 ⁇ / b> A is provided on the facing surface of the internal gear 61 facing the first annular member 62 in the axial direction.
- the first recess 61 ⁇ / b> A is a groove which is recessed in a V-shape toward the output shaft 3 in the axial direction from the facing surface of the internal gear 61.
- the first recess 61 ⁇ / b> A has an inclined surface 611 and an inclined surface 612.
- eight first concave portions 61A are provided at equal intervals along the circumferential direction centering on the central axis 91, as shown in FIG.
- the second recess 62 ⁇ / b> A is provided on the opposite surface of the first annular member 62 that faces the internal gear 61 in the axial direction.
- the second recess 62A is a groove which is recessed in a V-shape toward the input shaft 2 in the axial direction from the opposing surface of the first annular member 62.
- the second recess 62A has an inclined surface 621 and an inclined surface 622. Similar to the first recess 61A, eight second recesses 62A are provided at equal intervals along the circumferential direction centering on the central axis 91.
- the first recess 61A and the second recess 62A face each other in the axial direction to form a space therebetween.
- the rolling element 641 is a spherical rigid body interposed in the space between the first recess 61A and the second recess 62A.
- the rolling elements 641 are respectively inclined surfaces 611 and 612 of the first recess 61A and inclined surfaces 621 and 622 of the second recess 62A.
- Contact The rolling element 641 rolls on the inclined surfaces 611 and 612 of the first recess 61A and the inclined surfaces 621 and 622 of the second recess 62A as the internal gear 61 rotates.
- the spring 65 is located on the side of the output shaft 3 in the axial direction of the internal gear 61, and is provided so as to be sandwiched between the internal gear 61 and the side portion 73.
- the spring 65 is an elastic member that presses the plurality of planet rollers 42 radially inward.
- the spring 65 presses the internal gear 61 toward the first annular member 62.
- the pressing force of the spring 65 is made by the inclined surface 421 of the first cylindrical portion of the planet roller 42. A radially inward pressure is generated.
- the pressure adjustment mechanism 6 can improve the performance (back drivability) to make the small external force applied to the output shaft 3 easy to be transmitted to the input shaft 2. By improving the back drivability, the rotation control on the input shaft 2 side can be performed with high accuracy in accordance with the impact (load) applied to the output shaft 3. Moreover, in the first rotation mechanism 4, the speed reduction ratio can be accurately obtained by the pressure adjustment mechanism 6. Furthermore, slippage between the planetary roller 42, the first annular member 62, the second annular member 63, and the sun roller 41 can be reduced by the pressure adjustment mechanism 6, and the occurrence of lost motion can be prevented. The operation of the pressure control mechanism 6 will be described in detail later.
- a motor (not shown) is connected to the input shaft 2 to apply a rotational driving force.
- the sun roller 41 also rotates integrally with the input shaft 2.
- the sun roller 41 rotates, the three planet rollers 42 in contact with the sun roller 41 revolve around the central axis 91 while rotating on the rotational axis 92.
- the first planet roller support portion 431 and the rotation transmission shaft 44 rotate around the central axis 91.
- the sun gear 51 rotates around the central axis 91 integrally with the rotation transmission shaft 44.
- the number of rotations of the first planetary roller support portion 431 and the rotation transmission shaft 44 is lower than the number of rotations of the input shaft 2 and the sun roller 41. That is, the first rotation mechanism 4 reduces the rotational speed of the input shaft 2 and transmits it to the second rotation mechanism 5.
- the sun gear 51 rotates around the central axis 91
- the three planetary gears 52 meshing with the sun gear 51 revolve around the central axis 91 while rotating about the rotational axis 93.
- the planetary gear support 53 rotates around the central axis 91.
- the rotation speed of the planetary gear support 53 is lower than the rotation speed of the sun gear 51.
- the output shaft 3 that rotates integrally with the planetary gear support portion 53 rotates at a rotational speed lower than the rotational speed of the sun gear 51. That is, the second rotation mechanism 5 further decelerates the rotational speed of the input shaft 2 decelerated by the first rotation mechanism 4 and transmits it to the output shaft 3.
- the pressure control mechanism 6 acts to generate a pressing force inward in the radial direction on the planetary roller 42.
- the three planet gears 52 revolve around the central axis 91 when the input shaft 2 rotates.
- the three planetary gears 52 try to revolve around the central axis 91 when a load in the rotational direction acts on the output shaft 3. That is, the pressure adjustment mechanism 6 generates a pressing force for pressing the plurality of planet rollers 42 radially inward according to the rotation of the input shaft 2 or the load in the rotation direction of the output shaft 3.
- FIG. 5 is a side view of the cam 64 viewed from the radial direction.
- the internal gear 61, the first annular member 62, and the rolling elements 641 when a load in the rotational direction is not acting on the internal gear 61 are indicated by broken lines.
- FIG. 6 is a view showing the state of the spring 65 when no load in the rotational direction acts on the internal gear 61.
- FIG. 7 is a view showing the state of the spring 65 when a load in the rotational direction acts on the internal gear 61.
- the internal gear 61 When no load in the rotational direction acts on the internal gear 61, the internal gear 61 is pressed by the spring 65 toward the first annular member 62, as shown in FIG.
- the inner circumferential surface of the first annular member 62 abuts on the outer circumferential surface of the first cylindrical portion 421.
- the contact position between the inner peripheral surface of the first annular member 62 and the outer peripheral surface of the first cylindrical portion 421 is on the side of the input shaft 2 in the axial direction.
- Move to The first cylindrical portion 421 has a conical shape whose diameter decreases toward the output shaft 3 side. For this reason, when the contact position moves, the pressing force with which the first annular member 62 presses the first cylindrical portion 421 becomes strong. Similarly, the pressing force with which the second annular member 63 presses the second cylindrical portion 422 also becomes strong.
- the pressure adjusting mechanism 6 moves the plurality of planetary rollers 42 radially inward even when the three planetary rollers 42 do not rotate, that is, even when neither the input shaft 2 nor the output shaft 3 rotates. Generate pressing force to press.
- the first annular member 62 presses the first cylindrical portion 421 radially inward.
- the pressing force at this time is stronger than in the case of FIG.
- the pressing force with which the second annular member 63 presses the second cylindrical portion 422 also becomes strong. That is, when a load acts on the internal gear 61, the planetary roller 42 presses the sun roller 41 more strongly than when no load acts on the internal gear 61.
- FIG. 8 is a partial cross-sectional view of a transmission of a modification.
- the spring 65 is provided on the input shaft 2 side of the second annular member 63 in the axial direction.
- the cam 64 is provided on the output shaft 3 side of the internal gear 61 in the axial direction.
- a slide bearing is provided between the internal gear 61 and the first annular member 62. Even with this configuration, it is possible to generate a radially inward pressing force on the planetary roller 42 by using the pressing force of the cam 64 and the elastic force of the spring 65.
- the transmission 1 has been described as being used for a robot, but is not limited thereto. Further, the number of planet rollers 42 and planet gears 52 is not limited to the number described in the above embodiment.
- the present application is applicable to a transmission.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Friction Gearing (AREA)
Abstract
入力軸と異なる速度で、出力軸を回転させる変速機は、第1回転機構および第2回転機構、を備える。第1回転機構は、入力軸と一体的に回転する太陽ローラと、太陽ローラの回転に伴い自転する複数の遊星ローラと、複数の遊星ローラの公転と共に、中心軸を中心として回転する遊星ローラ支持部と、遊星ローラ支持部と共に、中心軸を中心として回転する回転伝達軸と、を有する。第2回転機構は、回転伝達軸と一体的に回転する太陽歯車と、太陽歯車と噛み合う複数の遊星歯車と、複数の遊星歯車の公転と共に、中心軸を中心として回転する遊星歯車支持部と、を有する。出力軸は、遊星歯車支持部と共に、中心軸を中心として回転する。出力軸の回転方向の負荷に応じて、複数の遊星ローラを径方向内側へ押圧する調圧機構、をさらに備える。
Description
本発明は、変速機に関する。
従来、変速機を用いたロボットが知られている。この種の変速機は、ロボットの駆動モータの回転運動を変速させて、アームへ伝達する。アームは、変速機により変速された回転数で旋回する。ロボットに変速機を用いる場合、駆動モータの回転軸は小型化のために高速回転する。高速回転時の騒音と振動を抑えるために、変速機にトラクションドライブを用いることがある。
特開2001-304350号公報には、トラクションドライブを用いた減速機が開示されている。当該公報の減速機は、遊星歯車装置と、トラクションドライブとが組み合わされる。そして、トラクションドライブが入力側に配置される。そのトラクションドライブで減速した回転動力を、遊星歯車装置により更に減速して出力する。
特開2001-304350号公報
ところで、近年、ロボットのなかには、人と協働して作業するものがある。特に人に隣接して協働作業を行う際には、人体との接触を敏感に感じて、出力側のアームにかかる負荷に応じて、入力側のモータの回転を制御する必要がある。このため、出力側の負荷を、入力側に伝わり易くする性能(バックドライバビリティ)が求められることがある。
このような問題を鑑みて、本発明の目的は、バックドライバビリティを向上させることができる変速機、を提供することである。
上記課題を解決するため、中心軸に沿って延び、中心軸を中心に回転する入力軸および出力軸を備え、前記入力軸と異なる速度で、前記出力軸を回転させる、変速機であって、
前記入力軸の回転を変速して前記出力軸に伝達する、第1回転機構および第2回転機構、を備え、前記第1回転機構は、前記入力軸と一体的に回転する太陽ローラと、前記太陽ローラの周囲に配置され、自転軸を中心として、前記太陽ローラの回転に伴い自転する複数の遊星ローラと、複数の前記遊星ローラの自転軸を支持し、中心軸を中心とする複数の前記遊星ローラの公転と共に、中心軸を中心として回転する遊星ローラ支持部と、前記遊星ローラ支持部と共に、中心軸を中心として回転する回転伝達軸と、を有し、前記第2回転機構は、前記回転伝達軸と一体的に回転する太陽歯車と、自転軸を中心として回転可能に、前記太陽歯車の周囲に配置され、前記太陽歯車と噛み合う、複数の遊星歯車と、複数の前記遊星歯車の自転軸を支持し、中心軸を中心とする複数の前記遊星歯車の公転と共に、中心軸を中心として回転する遊星歯車支持部と、を有し、前記出力軸は、前記遊星歯車支持部と共に、中心軸を中心として回転し、前記出力軸の回転方向の負荷に応じて、複数の前記遊星ローラを径方向内側へ押圧する調圧機構、をさらに備える。
前記入力軸の回転を変速して前記出力軸に伝達する、第1回転機構および第2回転機構、を備え、前記第1回転機構は、前記入力軸と一体的に回転する太陽ローラと、前記太陽ローラの周囲に配置され、自転軸を中心として、前記太陽ローラの回転に伴い自転する複数の遊星ローラと、複数の前記遊星ローラの自転軸を支持し、中心軸を中心とする複数の前記遊星ローラの公転と共に、中心軸を中心として回転する遊星ローラ支持部と、前記遊星ローラ支持部と共に、中心軸を中心として回転する回転伝達軸と、を有し、前記第2回転機構は、前記回転伝達軸と一体的に回転する太陽歯車と、自転軸を中心として回転可能に、前記太陽歯車の周囲に配置され、前記太陽歯車と噛み合う、複数の遊星歯車と、複数の前記遊星歯車の自転軸を支持し、中心軸を中心とする複数の前記遊星歯車の公転と共に、中心軸を中心として回転する遊星歯車支持部と、を有し、前記出力軸は、前記遊星歯車支持部と共に、中心軸を中心として回転し、前記出力軸の回転方向の負荷に応じて、複数の前記遊星ローラを径方向内側へ押圧する調圧機構、をさらに備える。
本願発明によれば、調圧機構により、必要最小限の荷重で遊星ローラを太陽ローラへ押圧することで、転がり抵抗が減少してバックドライバビリティが向上する。このため、出力軸の負荷に応じた入力側(モータ)の微細調整が可能となる。
以下、本願の例示的な実施形態について、図面を参照しながら説明する。なお、本願では、変速機の中心軸と平行な方向を「軸方向」、変速機の中心軸に直交する方向を「径方向」、変速機の中心軸を中心とする円弧に沿う方向を「周方向」、とそれぞれ称する。また、本願において「平行な方向」とは、略平行な方向も含む。また、本願において「直交する方向」とは、略直交する方向も含む。
<1.変速機の全体構成>
図1は、変速機1の断面図である。図2は、図1のII-II線における断面図である。図3は、図2のIII-III線における断面図である。
図1は、変速機1の断面図である。図2は、図1のII-II線における断面図である。図3は、図2のIII-III線における断面図である。
本実施形態の変速機1は、例えば、ロボットに用いられる。変速機1は、ロボットの駆動モータの回転運動を変速させて、アームへ伝達する。アームは、変速機1により変速された回転数で旋回する。
変速機1は、入力軸2および出力軸3を備える。入力軸2および出力軸3は、中心軸91に沿って延び、中心軸91を中心に回転する。変速機1は、入力軸2と異なる速度で、出力軸3を回転させる。
変速機1は、第1回転機構4と、第2回転機構5と、調圧機構6と、ケーシング7と、を備える。第1回転機構4および第2回転機構5は、入力軸2の回転を変速して出力軸3に伝達する。
ケーシング7は、中心軸91を囲み、内部に第1回転機構4および第2回転機構5を収容する。ケーシング7は、回転不可に固定される。ケーシング7は、軸保持部71と、蓋部72と、側部73とを有する。軸保持部71は、中心軸91を囲む円筒状の部材である。蓋部72は、軸保持部71から径方向外側に拡がる部材である。側部73は、蓋部72の径方向外側の端部から、軸方向に沿って延びる部材である。
後述する第1回転機構4は、入力軸2と一体的に回転する太陽ローラ41を有する。軸保持部71は、軸受81を介して、太陽ローラ41を保持する。軸受81は、例えば、ボールベアリングである。軸受81により、入力軸2および太陽ローラ41は、ケーシング7に対して、中心軸91を中心として、回転可能となる。
また、第2回転機構5は、出力軸3と一体的に回転する遊星歯車支持部53を有する。側部73は、軸受82を介して、遊星歯車支持部53を保持する。軸受82は、例えば、ボールベアリングである。軸受82により、出力軸3および遊星歯車支持部53は、ケーシング7に対して、中心軸91を中心として、回転可能となる。
第1回転機構4は、太陽ローラ41と、3つの遊星ローラ42と、第1遊星ローラ支持部431および第2遊星ローラ支持部432と、回転伝達軸44と、を有する。
太陽ローラ41は、中心軸91に沿って延び、中心軸91を中心に、入力軸2と一体的に回転する。太陽ローラ41は、前記のように、ケーシング7の軸保持部71に、回転可能に支持される。
3つの遊星ローラ42は、太陽ローラ41の周囲に配置される。3つの遊星ローラ42は、後述の第1遊星ローラ支持部431および第2遊星ローラ支持部432により、自転軸92を中心として自転可能に支持され、かつ、中心軸91を中心として公転可能に支持される。3つの遊星ローラ42それぞれの外周面は、太陽ローラ41の外周面と接触する。そして、3つの遊星ローラ42それぞれは、太陽ローラ41の回転に伴い、自転軸92を中心に自転しながら、中心軸91を中心に公転する。
3つの遊星ローラ42それぞれは、第1円筒部421と、第2円筒部422とを有する。第1円筒部421は、自転軸92を囲み、軸方向の出力軸3側に突出する。第1円筒部421は、出力軸3側に向かって径が縮小する円錐状である。第2円筒部422は、自転軸92を囲み、軸方向の入力軸2側へ突出する。第2円筒部422は、入力軸2側に向かって径が縮小する円錐状である。
第1遊星ローラ支持部431は、図2に示すように、軸方向から視て円形状である。第1遊星ローラ支持部431は、軸方向において、太陽ローラ41および遊星ローラ42より、出力軸3側に配置される。第1遊星ローラ支持部431は、3つの遊星ローラ42それぞれの自転軸92を挿入固定している。詳しくは、第1遊星ローラ支持部431は、3つの遊星ローラ42それぞれを支持する。このとき、第1遊星ローラ支持部431は、自転軸92を中心として回転可能に、3つの遊星ローラ42それぞれを支持する。第1遊星ローラ支持部431は、3つの遊星ローラ42の公転に伴い、中心軸91を中心として回転する。
第2遊星ローラ支持部432は、図示しないが、軸方向から視て円環状である。第2遊星ローラ支持部432は、軸方向において、太陽ローラ41および遊星ローラ42より、入力軸2側に配置される。つまり、第1遊星ローラ支持部431および第2遊星ローラ支持部432は、軸方向において、太陽ローラ41および遊星ローラ42を間に挟んで、対向して配置される。第2遊星ローラ支持部432は、3つの遊星ローラ42それぞれの自転軸92を挿入固定している。詳しくは、第2遊星ローラ支持部432は、3つの遊星ローラ42それぞれを支持する。このとき、第2遊星ローラ支持部432は、自転軸92を中心として回転可能に、3つの遊星ローラ42それぞれを支持する。
また、第2遊星ローラ支持部432は、ケーシング7の軸保持部71を囲む。そして、第2遊星ローラ支持部432と、軸保持部71との間には、軸受83が設けられる。軸受83は、例えば、ボールベアリングである。第2遊星ローラ支持部432は、軸受83により、軸保持部71に対して、回転可能となる。これにより、第1遊星ローラ支持部431は、3つの遊星ローラ42の公転に伴い、中心軸91を中心として回転する。
回転伝達軸44は、中心軸91に沿って延びる円柱状である。回転伝達軸44は、第1遊星ローラ支持部431に設けられ、第1遊星ローラ支持部431と共に、中心軸91を中心として回転する。つまり、回転伝達軸44は、3つの遊星ローラ42の公転に伴い、中心軸91を中心として回転する。
軸方向において、回転伝達軸44の出力軸3側の端部には、後述する遊星歯車支持部53の支持板531が、軸受84を介して支持される。第1回転機構4の第1遊星ローラ支持部431、第2遊星ローラ支持部432、回転伝達軸44および自転軸92それぞれは、軸受83と、軸受84とで、一体的に支持される。
第2回転機構5は、太陽歯車51と、3つの遊星歯車52と、遊星歯車支持部53と、を備える。
太陽歯車51は、第1回転機構4の回転伝達軸44に設けられる。太陽歯車51は、中心軸91を中心として、回転伝達軸44と一体的に回転する。
3つの遊星歯車52それぞれは、太陽歯車51の周囲に配置される。3つの遊星歯車52それぞれは、後述の遊星歯車支持部53により、自転軸93を中心として自転可能に支持され、かつ、中心軸91を中心として公転可能に支持される。3つの遊星歯車52は、太陽歯車51と噛み合う。そして、3つの遊星歯車52それぞれは、太陽歯車51の回転に伴い、自転軸93を中心に自転しながら、中心軸91を中心に公転する。
遊星歯車支持部53は、支持板531と、回転軸532とを有する。支持板531は、図示しないが、軸方向から視て円形状である。支持板531は、軸方向において、太陽歯車51および遊星歯車52より、出力軸3側に配置される。支持板531は、3つの遊星歯車52それぞれの自転軸93を支持する。詳しくは、支持板531は、3つの遊星歯車52それぞれを、自転軸93を中心として回転可能に支持する。また、回転伝達軸44は、軸受84を介して、支持板531に支持される。軸受84は、例えば、ボールベアリングである。そして、支持板531は、3つの遊星歯車52の公転に伴い、中心軸91を中心として回転する。
回転軸532は、中心軸91に沿って延びる円柱状である。回転軸532は、支持板531に設けられ、支持板531と共に、中心軸91を中心として回転する。回転軸532は、軸受82を介して、ケーシング7の側部73に、回転可能に支持される。出力軸3は、この回転軸532に設けられる。そして、出力軸3は、中心軸91を中心に、回転軸532と一体的に、ケーシング7に対して回転する。
調圧機構6は、複数の遊星ローラ42を径方向内側へ押圧する押圧力を発生させる機構である。調圧機構6は、ケーシング7の側部73の径方向内側に配置される。調圧機構6は、内歯歯車61と、第1環状部材62と、第2環状部材63と、カム64と、バネ65と、を有する。
内歯歯車61は、図1および図3に示すように、3つの遊星歯車52の径方向外側に配置される。内歯歯車61は、中心軸91を中心に回転可能であって、3つの遊星歯車52と噛み合う。内歯歯車61は、3つの遊星歯車52と噛み合うことで、中心軸91を中心に回転する。ただし、周方向における内歯歯車61の回転角度は、小さい。内歯歯車61は、後の図4で説明する、転動体641が、第1凹部61Aおよび第2凹部62Aから外れない程度に回転する。
第1環状部材62および第2環状部材63は、軸方向から視て、中心軸91を囲む円環状の部材である。第1環状部材62および第2環状部材63は、キー73Aにより、中心軸91を中心とする回転が不可に、側部73の内周面に設けられる。第1環状部材62および第2環状部材63は、内歯歯車61と軸方向に並び、内歯歯車61より、入力軸2側に配置される。
第1環状部材62は、軸方向に変位可能に、第1円筒部421の径方向外側に配置される。また、第1環状部材62は、内歯歯車61と軸方向に対向する。内歯歯車61と第1環状部材62との間には、後述のカム64が設けられる。第1環状部材62の内周面は、遊星ローラ42の第1円筒部421の外周面に当接する。第1環状部材62の内周面は、本願の「第1当接部」の一例である。
第2環状部材63は、軸方向に変位可能に、第2円筒部422の径方向外側に配置される。また、第2環状部材63は、軸方向において、第1環状部材62と対向し、第1環状部材62と、第2環状部材63との間に、遊星ローラ42が介在する。第2環状部材63の内周面は、遊星ローラ42の第2円筒部422の外周面に当接する。第2環状部材63の内周面は、本願の「第2当接部」の一例である。
図4は、径方向から視たカム64の側面図である。図4は、内歯歯車61が回転していない状態を示す図である。カム64は、内歯歯車61に設けられた第1凹部61Aと、第1環状部材62に設けられた第2凹部62Aと、転動体641とを有する。
第1凹部61Aは、軸方向において、第1環状部材62と対向する、内歯歯車61の対向面に設けられる。第1凹部61Aは、内歯歯車61の対向面から、軸方向の出力軸3側へV字状に凹む溝である。第1凹部61Aは、傾斜面611と、傾斜面612と有する。この例では、第1凹部61Aは、図3に示すように、中心軸91を中心に、周方向に沿って等間隔に、8個設けられる。
第2凹部62Aは、軸方向において、内歯歯車61と対向する、第1環状部材62の対向面に設けられる。第2凹部62Aは、第1環状部材62の対向面から、軸方向の入力軸2側へV字状に凹む溝である。第2凹部62Aは、傾斜面621と、傾斜面622と有する。第2凹部62Aは、第1凹部61Aと同様に、中心軸91を中心に、周方向に沿って等間隔に、8個設けられる。そして、第1凹部61Aと第2凹部62Aとは、軸方向に対向し、間に空間を形成する。
転動体641は、第1凹部61Aと、第2凹部62Aとの間の空間に介在する球状の剛体である。入力軸2が回転せず、出力軸3に回転負荷が与えられていない状態では、転動体641は、第1凹部61Aの傾斜面611、612と、第2凹部62Aの傾斜面621、622それぞれに接触する。転動体641は、内歯歯車61が回転することで、第1凹部61Aの傾斜面611、612、および第2凹部62Aの傾斜面621、622を転がる。
バネ65は、内歯歯車61の軸方向の出力軸3側に位置し、内歯歯車61と、側部73とで挟まれた状態で設けられる。バネ65は、複数の遊星ローラ42を、径方向内側に押圧する弾性部材である。この例では、バネ65は、内歯歯車61を第1環状部材62側へ押圧する。詳しくは後述するが、第1環状部材62に、軸方向の入力軸2側への押圧力を付与することで、バネ65の押圧力は遊星ローラ42の第1円筒部の傾斜面421によって、径方向内側への押圧力が発生する。
この調圧機構6により、出力軸3に加えられた微小外力が、入力軸2に伝わり易くする性能(バックドライバビリティ)を向上させることができる。バックドライバビリティが向上することにより、出力軸3に加わった衝撃(負荷)に応じて、入力軸2側の回転制御を精度よく行える。また、調圧機構6により、第1回転機構4において、精度よく減速比を得ることができる。さらに、調圧機構6により、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との滑りを小さくして、ロストモーションの発生を防ぐことができる。調圧機構6の動作については、後に詳述する。
<2.変速機の動作>
上記のように構成される変速機1の動作について、説明する。
上記のように構成される変速機1の動作について、説明する。
入力軸2には、不図示のモータが接続され、回転駆動力が付与される。入力軸2が中心軸91を中心に回転すると、入力軸2と一体的に太陽ローラ41も回転する。太陽ローラ41が回転すると、太陽ローラ41と接触する3つの遊星ローラ42が、自転軸92を中心に自転しつつ、中心軸91を中心に公転する。
3つの遊星ローラ42が公転すると、第1遊星ローラ支持部431および回転伝達軸44が、中心軸91を中心に、回転する。そして、回転伝達軸44と一体的に、太陽歯車51が、中心軸91を中心に回転する。このとき、第1遊星ローラ支持部431および回転伝達軸44の回転数は、入力軸2および太陽ローラ41の回転数よりも低い。つまり、第1回転機構4は、入力軸2の回転速度を減速させて、第2回転機構5に伝達する。
太陽歯車51が、中心軸91を中心に回転すると、太陽歯車51と噛み合う3つの遊星歯車52が、自転軸93を中心に自転しつつ、中心軸91を中心に公転する。3つの遊星歯車52が公転すると、遊星歯車支持部53は、中心軸91を中心に回転する。このとき、遊星歯車支持部53の回転数は、太陽歯車51の回転数よりも低い。このため、遊星歯車支持部53と一体的に回転する出力軸3は、太陽歯車51の回転数より低い回転数で回転する。つまり、第2回転機構5は、第1回転機構4により減速された入力軸2の回転速度を、さらに減速させて、出力軸3へ伝達する。
また、3つの遊星歯車52が回転すると、調圧機構6が作用し、遊星ローラ42に対して、径方向内側への押圧力を発生させる。3つの遊星歯車52は、入力軸2が回転すると、中心軸91を中心に公転する。また、3つの遊星歯車52は、入力軸2が回転しない場合であっても、出力軸3に回転方向の負荷が作用すると、中心軸91を中心に公転しようとする。つまり、調圧機構6は、入力軸2の回転、または、出力軸3の回転方向の負荷に応じて、複数の遊星ローラ42を径方向内側へ押圧する押圧力を発生する。
図5、図6および図7は、調圧機構6の作用を説明するための図である。図5は、径方向から視たカム64の側面図である。図5では、内歯歯車61に回転方向の負荷が作用していないときの、内歯歯車61と、第1環状部材62と、転動体641と、を破線で示す。図6は、内歯歯車61に回転方向の負荷が作用しないときのバネ65の状態を示す図である。図7は、内歯歯車61に回転方向の負荷が作用したときのバネ65の状態を示す図である。
内歯歯車61に回転方向の負荷が作用していないとき、図6に示すように、内歯歯車61は、バネ65により、第1環状部材62側へ押圧される。第1環状部材62の内周面は、第1円筒部421の外周面と当接する。第1環状部材62が内歯歯車61から押圧力を受けると、第1環状部材62の内周面と、第1円筒部421の外周面との当接位置は、軸方向の入力軸2側へ移動する。第1円筒部421は、出力軸3側に向かって径が縮小する円錐状である。このため、当接位置が移動すると、第1環状部材62が、第1円筒部421を押圧する押圧力は強くなる。同様に、第2環状部材63が、第2円筒部422を押圧する押圧力も、強くなる。
この結果、第1環状部材62および第2環状部材63は、遊星ローラ42および太陽ローラ41を押圧するため、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との滑りは小さくなる。これにより、入力軸2の回転開始時において、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との間で、滑りに起因するロストモーションの発生を防ぐことができる。このように、調圧機構6は、3つの遊星ローラ42が回転しない場合、つまり、入力軸2および出力軸3のいずれも回転しない場合であっても、複数の遊星ローラ42を径方向内側へ押圧する押圧力を発生する。
3つの遊星歯車52が回転すると、内歯歯車61が、図5の矢印で示す周方向に、僅かに回転する。このとき、内歯歯車61は、転動体641を転がしながら、周方向に移動する。そして、図5のように、内歯歯車61の傾斜面611および第1環状部材62の傾斜面622は、転動体641に乗り上がる。その結果、内歯歯車61は、第1環状部材62から離れる方向へ移動する。このとき、図7に示すように、バネ65は、内歯歯車61により、軸方向の出力軸3側へ押圧されるが、ケーシング7の側部73からの反力を受け、収縮する。そして、第1環状部材62は、第1円筒部421を径方向内側に押圧する。このときの押圧力は、図6の場合よりも強い。同様に、第2環状部材63が、第2円筒部422を押圧する押圧力も、強くなる。つまり、内歯歯車61に負荷が作用する場合、内歯歯車61に負荷が作用していない場合よりも、遊星ローラ42は、太陽ローラ41に強く押圧する。
これにより、太陽ローラ41と、遊星ローラ42との滑りに起因する、ロストモーションの発生を防ぐことができる。また、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との接触圧は大きくなるため、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との間の摩擦力が大きくなる。その結果、第1回転機構4において、回転速度が精度よく減速する。このように、第1回転機構4では、調圧機構6により、精度よく減速比を得ることができる。
さらに、入力軸2を回転させない状態で、出力軸3に回転負荷がかかると、3つの遊星歯車52が、中心軸91を中心に公転する。このとき、3つの遊星歯車52は、内歯歯車61と噛み合い、内歯歯車61は、中心軸91を中心として僅かに回転する。そして、図5~図7で説明したように、調圧機構6が作用することで、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との接触圧は大きくなる。このため、遊星ローラ42と、第1環状部材62および第2環状部材63、太陽ローラ41との滑りが小さく、出力軸3に加えられた回転負荷は、入力軸2に伝わり易くなる。つまり、バックドライバビリティが向上する。その結果、出力軸3に加わった回転負荷に応じて、入力軸2に接続されるモータの回転制御を精度よく行える。
<3.変形例>
以上、本発明の例示的な実施形態について説明したが、本発明は上記の実施形態に限定されるものではない。
以上、本発明の例示的な実施形態について説明したが、本発明は上記の実施形態に限定されるものではない。
図8は、変形例の変速機の一部断面図である。この例では、バネ65は、軸方向において、第2環状部材63の入力軸2側に設けられる。また、カム64は、軸方向において、内歯歯車61の出力軸3側に設けられる。内歯歯車61と、第1環状部材62との間には、例えば、すべり軸受が設けられる。この構成であっても、カム64の押圧力およびバネ65の弾性力を利用して、遊星ローラ42に対して、径方向内側への押圧力を発生させることができる。
上記の実施形態では、変速機1は、ロボットに用いられるものとして説明したが、これに限定されない。また、遊星ローラ42および遊星歯車52の数は、上記の実施形態で説明した数に限定されない。
以上、一実施形態について説明したが、上述の実施形態および変形例に登場した各要素を、矛盾が生じない範囲で、適宜に組み合わせてもよい。
本出願は、2017年10月18日に出願された日本出願である特願2017-201499号に基づく優先権を主張し、当該日本出願に記載された全ての記載内容を援用するものである。
本願は、変速機に利用できる。
1 :変速機
2 :入力軸
3 :出力軸
4 :第1回転機構
5 :第2回転機構
6 :調圧機構
7 :ケーシング
41 :太陽ローラ
42 :遊星ローラ
44 :回転伝達軸
51 :太陽歯車
52 :遊星歯車
53 :遊星歯車支持部
61 :内歯歯車
61A :第1凹部
62 :第1環状部材
62A :第2凹部
63 :第2環状部材
64 :カム
65 :バネ
71 :軸保持部
72 :蓋部
73A :キー
73 :側部
81 :軸受
82 :軸受
83 :軸受
91 :中心軸
92 :自転軸
93 :自転軸
421 :第1円筒部
422 :第2円筒部
431 :第1遊星ローラ支持部
432 :第2遊星ローラ支持部
531 :支持板
532 :回転軸
611 :傾斜面
612 :傾斜面
621 :傾斜面
622 :傾斜面
641 :転動体
2 :入力軸
3 :出力軸
4 :第1回転機構
5 :第2回転機構
6 :調圧機構
7 :ケーシング
41 :太陽ローラ
42 :遊星ローラ
44 :回転伝達軸
51 :太陽歯車
52 :遊星歯車
53 :遊星歯車支持部
61 :内歯歯車
61A :第1凹部
62 :第1環状部材
62A :第2凹部
63 :第2環状部材
64 :カム
65 :バネ
71 :軸保持部
72 :蓋部
73A :キー
73 :側部
81 :軸受
82 :軸受
83 :軸受
91 :中心軸
92 :自転軸
93 :自転軸
421 :第1円筒部
422 :第2円筒部
431 :第1遊星ローラ支持部
432 :第2遊星ローラ支持部
531 :支持板
532 :回転軸
611 :傾斜面
612 :傾斜面
621 :傾斜面
622 :傾斜面
641 :転動体
Claims (7)
- 中心軸に沿って延び、中心軸を中心に回転する入力軸および出力軸を備え、前記入力軸と異なる速度で、前記出力軸を回転させる、変速機であって、
前記入力軸の回転を変速して前記出力軸に伝達する、第1回転機構および第2回転機構、
を備え、
前記第1回転機構は、
前記入力軸と一体的に回転する太陽ローラと、
前記太陽ローラの周囲に配置され、自転軸を中心として、前記太陽ローラの回転に伴い自転する複数の遊星ローラと、
複数の前記遊星ローラの自転軸を支持し、中心軸を中心とする複数の前記遊星ローラの公転と共に、中心軸を中心として回転する遊星ローラ支持部と、
前記遊星ローラ支持部と共に、中心軸を中心として回転する回転伝達軸と、
を有し、
前記第2回転機構は、
前記回転伝達軸と一体的に回転する太陽歯車と、
自転軸を中心として回転可能に、前記太陽歯車の周囲に配置され、前記太陽歯車と噛み合う、複数の遊星歯車と、
複数の前記遊星歯車の自転軸を支持し、中心軸を中心とする複数の前記遊星歯車の公転と共に、中心軸を中心として回転する遊星歯車支持部と、
を有し、
前記出力軸は、前記遊星歯車支持部と共に、中心軸を中心として回転し、
前記出力軸の回転方向の負荷に応じて、複数の前記遊星ローラを径方向内側へ押圧する調圧機構、
をさらに備える、
変速機。 - 請求項1に記載の変速機であって、
前記遊星ローラは、
自転軸を囲み、前記出力軸側へ軸方向に突出し、前記出力軸側に向かって径が縮小する円錐状の第1円筒部、
を有し、
前記調圧機構は、
中心軸を中心に回転可能に、複数の前記遊星歯車の径方向外側に配置され、複数の前記遊星歯車と噛み合う、内歯歯車と、
軸方向に変位可能に、前記第1円筒部の径方向外側に配置され、前記第1円筒部の外周面に当接する第1当接部と、
前記内歯歯車の回転に伴い、前記第1当接部を軸方向に変位させるカムと、
を有する、
変速機。 - 請求項2に記載の変速機であって、
前記調圧機構は、
軸方向に変位可能に、前記第1円筒部の径方向外側に配置され、かつ、前記内歯歯車と軸方向に対向する、中心軸を囲む第1環状部材
を有し、
前記第1当接部は、前記第1環状部材の内周面であり、
前記カムは、
前記第1環状部材と対向する、前記内歯歯車の対向面に設けられた第1凹部と、
前記内歯歯車と対向する、前記第1環状部材の対向面に設けられ、前記第1凹部と対向する第2凹部と、
前記第1凹部と、前記第2凹部との間に介在する転動体と、
を有する、
変速機。 - 請求項2または請求項3に記載の変速機であって、
前記遊星ローラは、自転軸を囲み、前記入力軸側へ軸方向に突出し、前記入力軸側に向かって径が縮小する円錐状の第2円筒部を有し、軸方向に変位可能であり、
前記調圧機構は、前記第2円筒部の径方向外側に配置され、前記第2円筒部の外周面に当接する第2当接部、を有する、
変速機。 - 請求項4に記載の変速機であって、
前記調圧機構は、
前記第2円筒部の径方向外側に配置され、中心軸を囲む第2環状部材
を有し、
前記第2当接部は、前記第2環状部材の内周面である、
変速機。 - 請求項2から請求項5までのいずれか一つに記載の変速機であって、
前記調圧機構は、
複数の前記遊星ローラを、径方向内側に押圧する弾性部材、
を有する、
変速機。 - 請求項1から請求項6までのいずれか一つに記載の変速機であって、
前記太陽ローラは、前記入力軸の外周面である、
変速機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880066669.7A CN111212993B (zh) | 2017-10-18 | 2018-10-11 | 变速器 |
| JP2019549233A JP7207628B2 (ja) | 2017-10-18 | 2018-10-11 | 変速機 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017201499 | 2017-10-18 | ||
| JP2017-201499 | 2017-10-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019078088A1 true WO2019078088A1 (ja) | 2019-04-25 |
Family
ID=66173951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/037958 WO2019078088A1 (ja) | 2017-10-18 | 2018-10-11 | 変速機 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7207628B2 (ja) |
| CN (1) | CN111212993B (ja) |
| WO (1) | WO2019078088A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021134847A (ja) * | 2020-02-27 | 2021-09-13 | 日本電産シンポ株式会社 | ハイブリッド減速機およびモータ付きハイブリッド減速機 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020159535A (ja) * | 2019-03-28 | 2020-10-01 | 日本電産シンポ株式会社 | トラクション減速機 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011252603A (ja) * | 2006-03-24 | 2011-12-15 | Toyota Central R&D Labs Inc | 動力伝達装置 |
| JP2014055657A (ja) * | 2012-09-14 | 2014-03-27 | Toyota Central R&D Labs Inc | 遊星ローラ機構 |
| JP2017141910A (ja) * | 2016-02-10 | 2017-08-17 | 武蔵精密工業株式会社 | 伝動装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05157148A (ja) * | 1991-11-06 | 1993-06-22 | Shimpo Ind Co Ltd | 摩擦伝動変速機 |
| TWI257758B (en) * | 2000-09-14 | 2006-07-01 | Sumitomo Heavy Industries | Series of motors with speed reducers |
| JP2002295606A (ja) * | 2001-03-28 | 2002-10-09 | Sumitomo Heavy Ind Ltd | 2段形減速機及びモータ付き2段形減速機 |
| WO2015178098A1 (ja) * | 2014-05-23 | 2015-11-26 | 日本精工株式会社 | 摩擦ローラ式変速機 |
| JP2016048112A (ja) * | 2014-08-25 | 2016-04-07 | 日本精工株式会社 | 摩擦ローラ式減速機 |
| JP2016070285A (ja) * | 2014-09-26 | 2016-05-09 | 日本電産シンポ株式会社 | 減速装置 |
| JP6650724B2 (ja) * | 2015-10-19 | 2020-02-19 | 日本電産シンポ株式会社 | 変速機 |
| JP6642079B2 (ja) * | 2016-02-12 | 2020-02-05 | 日本精工株式会社 | 摩擦ローラ式減速機 |
-
2018
- 2018-10-11 CN CN201880066669.7A patent/CN111212993B/zh active Active
- 2018-10-11 WO PCT/JP2018/037958 patent/WO2019078088A1/ja active Application Filing
- 2018-10-11 JP JP2019549233A patent/JP7207628B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011252603A (ja) * | 2006-03-24 | 2011-12-15 | Toyota Central R&D Labs Inc | 動力伝達装置 |
| JP2014055657A (ja) * | 2012-09-14 | 2014-03-27 | Toyota Central R&D Labs Inc | 遊星ローラ機構 |
| JP2017141910A (ja) * | 2016-02-10 | 2017-08-17 | 武蔵精密工業株式会社 | 伝動装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021134847A (ja) * | 2020-02-27 | 2021-09-13 | 日本電産シンポ株式会社 | ハイブリッド減速機およびモータ付きハイブリッド減速機 |
| JP7448111B2 (ja) | 2020-02-27 | 2024-03-12 | ニデックドライブテクノロジー株式会社 | ハイブリッド減速機およびモータ付きハイブリッド減速機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7207628B2 (ja) | 2023-01-18 |
| CN111212993B (zh) | 2023-06-13 |
| CN111212993A (zh) | 2020-05-29 |
| JPWO2019078088A1 (ja) | 2020-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8613684B2 (en) | Continuously variable transmission | |
| WO2011101991A1 (ja) | 動力伝達装置 | |
| JP4948968B2 (ja) | 遊星ローラ式変速機 | |
| JP5138535B2 (ja) | 増減速装置 | |
| JP2017044287A (ja) | 波動歯車伝達装置 | |
| WO2019078088A1 (ja) | 変速機 | |
| JP6182245B1 (ja) | 遊星歯車機構を利用したクラッチ | |
| JP4407281B2 (ja) | 摩擦伝動装置 | |
| JP7068102B2 (ja) | ハイポサイクロイド減速機 | |
| JP5203209B2 (ja) | 無段変速装置 | |
| JPWO2007029564A1 (ja) | 遊星ローラ変速装置及びそれを備えた車輌 | |
| KR101863502B1 (ko) | 구동 전달 장치 | |
| WO2012086327A1 (ja) | 歯車伝動装置 | |
| WO2016021410A1 (ja) | スタビライザー装置 | |
| JP2009121574A (ja) | 摩擦式増減速装置 | |
| JP2024076609A (ja) | 減速機 | |
| JP2008019962A (ja) | 遊星ローラ変速装置 | |
| JP2024050213A (ja) | 車両用駆動伝達装置 | |
| WO2018012574A1 (ja) | 変速機 | |
| JP2024076608A (ja) | 遊星歯車機構、及びそれを備えた減速機 | |
| JP2020133719A (ja) | トラクション変速機およびアクチュエータ | |
| JPH0735212A (ja) | 減速装置 | |
| JP2001065653A (ja) | 摩擦ローラ式変速装置 | |
| JP2024111979A (ja) | 遊星歯車機構 | |
| WO2019009176A1 (ja) | 減速機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18867722 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019549233 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18867722 Country of ref document: EP Kind code of ref document: A1 |