WO2019054475A1 - モータ駆動システムおよびモータの制御方法 - Google Patents
モータ駆動システムおよびモータの制御方法 Download PDFInfo
- Publication number
- WO2019054475A1 WO2019054475A1 PCT/JP2018/034169 JP2018034169W WO2019054475A1 WO 2019054475 A1 WO2019054475 A1 WO 2019054475A1 JP 2018034169 W JP2018034169 W JP 2018034169W WO 2019054475 A1 WO2019054475 A1 WO 2019054475A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetic sensor
- rotor
- magnetic pole
- motor
- axis
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 21
- 238000001514 detection method Methods 0.000 claims abstract description 68
- 230000002159 abnormal effect Effects 0.000 claims description 5
- 239000000758 substrate Substances 0.000 abstract description 13
- 238000010586 diagram Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 239000013598 vector Substances 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 230000002542 deteriorative effect Effects 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000007850 degeneration Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/04—Means for controlling progress of starting sequence in dependence upon time or upon current, speed, or other motor parameter
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/04—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/03—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/022—Synchronous motors
- H02P25/024—Synchronous motors controlled by supply frequency
- H02P25/026—Synchronous motors controlled by supply frequency thereby detecting the rotor position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/022—Synchronous motors
- H02P25/03—Synchronous motors with brushless excitation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
Definitions
- the present invention relates to a motor drive system including a multiphase brushless motor and a control method of the multiphase brushless motor.
- a drive control method of the brushless motor there are a rectangular wave drive method in which the energization pattern is changed at every electrical angle of 60 degrees of rotor rotation, and a sine wave drive method driven by sine waves synchronized with the rotation.
- the sine wave drive has better driving efficiency than the rectangular wave drive, and has low vibration and low noise because the torque fluctuation is small.
- a magnetic pole detection sensor for generating a drive voltage in synchronization with the rotation of the rotor is used.
- Patent Document 1 the magnetic pole position is estimated by interpolation calculation at a fixed rotation or more, and the interpolation calculation is not performed at a very low speed less than that, and a fixed angle numerical value at the detection position is used. Further, in Japanese Patent Application Laid-Open No. 2007-110781 (Patent Document 2), a decrease in torque is prevented by increasing and correcting the current value at extremely low speed or at a stop.
- Patent Document 1 the torque fluctuation at the extremely low speed is not performed because the fixed numerical value at the detection position is discretely used. Can not hold back.
- Patent Document 2 when the current value is corrected to be increased at extremely low speed or at a stop, there remains the problem that torque is increased depending on the rotational position. Linearity of torque characteristics can not be secured.
- the present invention has been made to solve the above-described problems, and an object thereof is to reduce torque fluctuation at the time of rotation stop at an extremely low speed while using a relatively inexpensive and compact sensor.
- a motor drive system and a control method of a motor are provided.
- the present invention in summary, is a motor drive system, comprising: a stator on which coils of a plurality of phases are wound; a rotor rotating around a rotational axis with respect to the stator; The same number of coils as the number of phases of coils disposed in a member, and a two-axis magnetic sensor disposed in a member in which the positional relationship between the pulsar ring and the stator is fixed.
- the magnetic pole rotation angle detection unit that detects the magnetic pole rotation angle of the rotor by receiving the outputs of the above alternating magnetic sensor, the 2-axis magnetic sensor and the alternating magnetic sensor, and the magnetic pole rotation of the rotor detected by the magnetic pole rotation angle detection unit And a motor controller that controls the current of the coil using the angle.
- the magnetic pole rotational angle detection unit calculates the rotational angle of the magnetic pole of the rotor using the output of the two-axis magnetic sensor, and the rotational speed of the rotor is the threshold. If higher, the output of the alternating magnetic sensor is used to calculate the rotation angle of the magnetic pole of the rotor.
- the magnetic pole rotation angle detection unit uses the output of the normal magnetic sensor when either one of the two-axis magnetic sensor or the alternating magnetic sensor is abnormal and the other is normal. Calculate the magnetic pole rotation angle.
- the present invention in another aspect, is a method of controlling a motor.
- the motor is fixed to a stator in which coils of a plurality of phases are wound, a rotor rotating around a rotation axis with respect to the stator, and a rotor, and magnets are alternately arranged such that N and S poles are annularly located.
- a pulsar ring to be disposed, a two-axis magnetic sensor disposed on a member having a fixed positional relationship with the stator, and alternating magnetic sensors disposed on the member equal in number to the number of phases of coils or more are provided.
- the control method calculates the magnetic pole rotation angle of the rotor using the output of the two-axis magnetic sensor when the rotational speed of the rotor is lower than the threshold, and when the rotational speed of the rotor is higher than the threshold,
- the method comprises the steps of: calculating the magnetic pole rotation angle of the rotor using the output of the alternating magnetic sensor; and controlling the current of the coil using the detected magnetic pole rotation angle of the rotor.
- FIG. 1 is a block diagram showing a schematic configuration of a multiphase brushless motor according to a first embodiment.
- FIG. 6 is a projection view showing the main components of a motor 50.
- FIG. 5 is a development view of main components of a motor 50. It is a figure which shows the shape of the board
- FIG. It is a figure for demonstrating the vector which a 2-axis magnetic sensor detects. It is a figure which shows the 1st example of the output waveform of a 2-axis magnetic sensor. It is a figure which shows the 2nd example of the output waveform of a 2-axis magnetic sensor. It is the figure which expanded and showed a part of pulsar ring 53. As shown in FIG. FIG. FIG.
- FIG. 7 is a schematic view showing how the relative position of the two-axis magnetic sensor 80 changes along the pulser ring 53. It is a figure which shows an example of the relationship between a magnetic pole rotation angle and the detection angle of the biaxial magnetic sensor. It is the figure which compared and showed the torque fluctuation characteristic by the motor rotational position in a stall state by sine wave drive and a square wave drive. It is the figure which compared and showed the NT characteristic of the case where a two-axis magnetic sensor is used for magnetic pole detection, and the case where an alternating type magnetic sensor is used, in the same motor.
- 5 is a flowchart for describing switching processing of the magnetic pole rotation angle detection unit 60 of the first embodiment.
- FIG. 16 is a flowchart for describing switching processing of the magnetic pole rotation angle detection unit 60 of the second embodiment. It is a figure showing an application example of a motor drive system.
- FIG. 1 is a block diagram showing a schematic configuration of a multiphase brushless motor according to a first embodiment.
- motor drive system 10 includes motor control device 20, drive circuit 30, inverter 40, three-phase brushless DC motor (hereinafter “motor”) 50, and magnetic pole rotation angle detection unit 60. , An alternating magnetic sensor 70, a two-axis magnetic sensor 80, and a current sensor 90.
- Motor control device 20 is based on the current value of each phase coil of motor 50 detected by current sensor 90, the magnetic pole rotational angle of the rotor of motor 50 detected by magnetic pole rotational angle detection unit 60, and the given command value. Control the drive circuit 30.
- the motor control device 20 generates a current command value from a command value given based on the number of rotations, torque, the position of the driven body interlocked with the rotor of the motor, etc., performs PWM processing, and outputs a drive signal of the drive circuit 30.
- Drive circuit 30 generates control pulses for turning on / off each of the six power switching elements in inverter 40 based on the PWM signal received from motor control device 20, and transmits the control pulse to inverter 40.
- a drive current flows from the U-phase, V-phase, and W-phase conduction paths to the stator coil, and the motor 50 is rotationally driven.
- the alternating magnetic sensor 70 includes Hall sensors 71-73. In each of the Hall sensors 71 to 73, the output is switched to binary by the N pole and the S pole of the magnetic pole.
- the two-axis magnetic sensor 80 detects the direction of the magnetic field in the motor 50 as described later.
- the magnetic pole rotation angle detection unit 60 receives the output of the alternating magnetic sensor 70 and the output of the two-axis magnetic sensor 80.
- FIG. 2 is a projection view showing the main components of the motor 50.
- FIG. 3 is a development view of main parts of the motor 50.
- motor 50 is fixed to stator 51, rotor 52 rotating around the rotation axis with respect to stator 51, and rotor 52, and alternately has N poles and S poles annularly. It includes a pulsar ring 53 in which a magnet is disposed so as to be positioned, and a member whose positional relationship with the stator 51 is fixed (for example, a substrate 54 fixed to a motor case (not shown) to which the stator 51 is fixed).
- the stator 51 includes a stator core 51A formed of a magnetic material such as an electromagnetic steel plate, and three star-connected signal phases U-phase, V-phase, and W-phase stator coils 51B wound around the stator core 51A.
- Rotor 52 includes a rotor core 52A and a permanent magnet 52B disposed on the outer periphery of rotor core 52A.
- magnets are arranged on the same number of N poles and S poles as the permanent magnets 52B of the rotor, and are arranged such that the distance to the substrate 54 is constant.
- the motor illustrated in FIGS. 2 and 3 is a motor having a hollow rotor 52.
- the rotor 52 may not necessarily be hollow and may be fixed to a rotating shaft that is an output shaft of the motor. good.
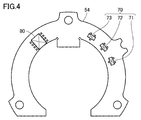
- FIG. 4 is a view showing the shape of the substrate 54. As shown in FIG. As shown in FIG. 4, on the substrate 54, the alternating magnetic sensor 70 and the biaxial magnetic sensor 80 of FIG. 1 are disposed.
- the alternating type magnetic sensor 70 detects the position of the magnet on the pulser ring 53 which rotates with the rotation of the rotor 52 by the Hall sensors 71 to 73, and positions as magnetic pole position information at predetermined angles (for example, 60 °).
- the detection signals PU, PV, PW are output.
- Magnetic pole rotation angle detection unit 60 generates six detection pulses based on the combination of the signal levels of position detection signals PU, PV and PW received from Hall sensors 71 to 73, and detects the magnetic pole position based on each detection pulse. Configured to The hall sensors 71 to 73 switch the high level / low level of the output according to the alternating detection, that is, the switching of the polarity of the magnetic pole. The Hall sensors 71 to 73 remember the polarity of the magnetic pole that was approaching last after the magnet left. Such Hall sensors are conventionally used for coil switching of a brushless motor.
- the two-axis magnetic sensor 80 detects a magnetic field at a certain point in the space to be a detected point.
- the order of the space to be detected is determined by the number of detection axes orthogonal to each other, and the magnetic field can be detected as a vector in a two-dimensional plane with two axes and a three-dimensional space with three axes.
- a biaxial magnetic sensor 80 is used as shown in FIG. 1 in order to detect a rotating magnetic field.
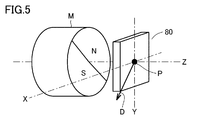
- FIG. 5 is a diagram for explaining vectors detected by the two-axis magnetic sensor.
- FIG. 6 is a diagram showing a first example of the output waveform of the two-axis magnetic sensor.
- FIG. 7 is a diagram showing a second example of the output waveform of the two-axis magnetic sensor.
- the two-axis magnetic sensor is provided, for example, as an IC in which a plurality of Hall elements and a signal processing circuit are integrated, and as shown in FIG. 6, a type (type A) that outputs the magnetic field strength of each of X and Y axes. As shown in FIG. 7, there is a type (type B) in which the angle ⁇ of the magnetic field vector is output by internal calculation.
- the output of the type A sensor is a sine wave (sin wave) and a cosine wave (cos wave)
- the output of the type B sensor is a sawtooth wave.
- FIG. 8 is an enlarged view of a part of the pulser ring 53.
- FIG. 9 is a schematic view showing how the relative position of the two-axis magnetic sensor 80 changes along the pulser ring 53. As shown in FIG.
- the magnetic poles of the pulsar ring 53 are circumferentially arranged in synchronization with the magnetic poles of the rotor as in the case of using a conventional alternating magnetic force sensor (N-S switch) and the direction of the magnetic field is detected as in the previous example,
- This cycle coincides with the cycle of the electrical angle of the motor. That is, when the rotor 52 rotationally moves by one pole pair, the electrical angle makes one rotation, and in synchronization with this, the detection angle by the two-axis magnetic sensor 80 also makes one rotation.
- the electrical angle can be detected by the two-axis magnetic sensor 80.
- the configuration of the three-phase brushless motor according to the present embodiment will be described with reference to FIGS. 3 and 4 again.
- the pulsar ring 53 which is an object to be detected in the magnetic pole detection, rotates with the rotor 52, and the three-phase alternating magnetic sensor 70 (three Hall sensors 71 to 73) and one two-axis magnetic sensor 80 are pulsar rings. It is fixed to the substrate 54 to face the face 53.
- the substrate 54 is fixed to a motor case (not shown) together with the stator 51.
- the two-axis magnetic sensor is a component of a magnetic field generated by the pulser ring 53 on a plane orthogonal to the surface of the pulser ring 53 and parallel to the circumferential tangent. (Indicated by an arrow in FIG. 9) is detected.
- the direction of the magnetic field detected by the two-axis magnetic sensor 80 is represented by a rotation angle of 360 °, and when the rotor 52 makes one rotation, it rotates by the number of pole pairs.
- the detection angle of the two-axis magnetic sensor 80 rotates six times when the rotor 52 makes one rotation.
- the electrical angle rotates by the number of pole pairs for one mechanical angle of the rotor, and motor control with less torque fluctuation can be realized by accurately detecting the electrical angle.
- the direction of the detected magnetic field uniquely corresponds to the rotation of the electrical angle, and the direction of the detected magnetic field is converted to the electrical angle.
- the electrical angle can be accurately calculated.
- FIG. 10 is a diagram showing an example of the relationship between the magnetic pole rotation angle and the detection angle of the two-axis magnetic sensor 80. As shown in FIG. Since the transitions of the respective angles do not coincide as shown in FIG. 10, a conversion for obtaining the electrical angle from the detection angle is required. This conversion may be performed using the linearity correction function of the two-axis magnetic sensor 80, or the calculation may be performed at the subsequent stage of the two-axis magnetic sensor 80.
- FIG. 11 is a diagram showing the torque fluctuation characteristics depending on the motor rotational position in the stalled state in comparison between the sine wave drive and the rectangular wave drive. As shown in FIG. 11, the variation of the stall torque is suppressed in the case of the sine wave drive as compared with the case of the rectangular wave drive. Therefore, by performing the sine wave drive, torque fluctuation is reduced at the time of stall or extremely low speed.
- the two-axis magnetic sensor 80 may be mounted on the existing substrate 54, the layout of the output axis is not limited as in the case of adding a resolver or the like. According to the motor drive system of the present embodiment, sine wave drive can be used even in a stalled state by using the inexpensive two-axis magnetic sensor 80, and torque fluctuation is improved more than using an alternating magnetic sensor. can do.
- the two-axis magnetic sensor 80 may cause a delay in detection when the arithmetic processing is performed in the sensor, or it may take time to perform the arithmetic processing at a later stage, causing deterioration of motor performance at high speed rotation. there's a possibility that.
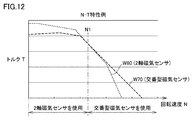
- FIG. 12 is a diagram comparing NT characteristics between the case where a two-axis magnetic sensor is used for magnetic pole detection and the case where an alternating magnetic sensor is used in the same motor.
- the NT characteristic indicating the relationship between the rotational speed and the torque is better when using the two-axis magnetic sensor 80 (W80) in the low rotational range from stall to rotational speed N1. It is better to use the alternating magnetic sensor 70 (W70) in the high rotation area exceeding.
- FIG. 13 is a flowchart for explaining the switching process of the magnetic pole rotation angle detection unit 60 according to the first embodiment.
- magnetic pole rotation angle detection unit 60 determines whether the current rotational speed is lower than N1. If the rotational speed is lower than N1 (YES in S1), the magnetic pole rotational angle detection unit 60 detects the magnetic pole position from the output of the two-axis magnetic sensor 80.
- the magnetic pole rotational angle detection unit 60 detects the magnetic pole position from the output of the alternating magnetic sensor 70.
- the process proceeds to step S4.
- motor control using the detected magnetic pole position is performed.
- sensorless control can be used instead of the three-phase alternating type hall sensor.
- control at the start of motor rotation is complicated and motor performance is limited, but these defects can be compensated by using magnetic pole detection by the two-axis magnetic sensor 80 in combination at the start of rotation.
- Second Embodiment In the first embodiment, it has been described that two types of magnetic sensors are switched and used according to the rotational speed. In the second embodiment, two types of magnetic sensors having a redundant configuration are used to improve the reliability.
- FIG. 14 is a flowchart for explaining the switching process of the magnetic pole rotation angle detection unit 60 according to the second embodiment.
- step S11 magnetic pole rotation angle detection unit 60 determines whether the current rotational speed is lower than N1. If the rotational speed is lower than N1 (YES in S11), in step S12, the magnetic pole rotational angle detection unit 60 determines whether the output of the two-axis magnetic sensor 80 is normal. For example, when the output of the two-axis magnetic sensor 80 is fixed at 0 V, disconnection is suspected, so the magnetic pole rotation angle detection unit 60 determines that the output of the two-axis magnetic sensor 80 is not normal. If it is determined in step S12 that the output of the two-axis magnetic sensor 80 is abnormal (NO in S12), in step S13, the magnetic pole rotation angle detection unit 60 determines whether the output of the alternating magnetic sensor 70 is normal or not. To judge.
- step S14 the magnetic pole rotational angle detection unit 60 determines whether the output of the alternating magnetic sensor 70 is normal. For example, when at least one of the outputs of the alternating magnetic sensor 70 is fixed at 0 V, the magnetic pole rotational angle detection unit 60 determines that the output of the alternating magnetic sensor 70 is not normal because disconnection is suspected. . If it is determined in step S14 that the output of the alternating magnetic sensor 70 is abnormal (NO in S14), in step S15, the magnetic pole rotational angle detection unit 60 determines whether the output of the biaxial magnetic sensor 80 is normal or not. To judge.
- step S12 or step S15 If it is determined in step S12 or step S15 that the output of the two-axis magnetic sensor 80 is normal, the magnetic pole rotation angle detection unit 60 detects the magnetic pole position from the output of the two-axis magnetic sensor 80 (S16). On the other hand, when the output of the alternating magnetic sensor 70 is determined to be normal in step S13 or step S14, the magnetic pole rotation angle detection unit 60 detects the magnetic pole position from the output of the alternating magnetic sensor 70 (S17).
- step S18 In the motor control device 20 of FIG. 1, motor control using the detected magnetic pole position is performed.
- magnetic pole rotation angle detection unit 60 Outputs a magnetic sensor failure error display (S19), causes the motor control device to stop the motor (S20), and ends the detection processing of the magnetic pole rotation angle (S21).
- FIG. 15 is a view showing an application example of a motor drive system.
- motor drive system 110 incorporates linear motion mechanism 130 in motor drive system 10 of FIG.
- the motor drive system 110 further includes a speed reducer 120 that decelerates the rotation of the rotor of the motor 50, a linear motion mechanism 130, and a stroke sensor 140.
- the linear motion mechanism 130 includes a ball screw nut 131 connected to the reduction gear 120 and a ball screw shaft 132 whose rotation is restricted.
- the stroke amount X changes so that the ball screw shaft 132 moves forward or backward according to the rotation direction.
- the stroke sensor 140 detects the stroke amount X of the ball screw shaft 132, and outputs it to the motor control device 20A.
- the motor control device 20A controls the rotation of the motor 50 so that the stroke amount X matches the command value.
- the motor 50 is not always rotating, and rotation and stopping are often repeated frequently.
- the motor drive system of the present embodiment it is possible to obtain a stable thrust even in the linear motion mechanism.
- motor drive system 10 includes a stator 51 on which stator coils 51 B of a plurality of phases are wound, a rotor 52 that rotates around a rotational axis with respect to stator 51, and a rotor 52.
- a pulsar ring 53 which is fixed and in which a magnet is disposed so that an N pole and a S pole are alternately positioned annularly, a two-axis magnetic sensor 80, an alternating magnetic sensor 70, a magnetic pole rotation angle detection unit 60, and motor control And an apparatus 20.
- the two-axis magnetic sensor 80 is disposed on a substrate 54 whose positional relationship with the stator 51 is fixed.
- the alternating magnetic sensor 70 includes Hall sensors 71 to 73 disposed on the substrate 54 and having the same number or more as the number of phases of the stator coils 51B.
- the magnetic pole rotation angle detection unit 60 receives the outputs of the two-axis magnetic sensor 80 and the alternating type magnetic sensor 70 to detect the magnetic pole rotation angle of the rotor.
- the motor control device 20 controls the current of the coil using the magnetic pole rotation angle of the rotor 52 detected by the magnetic pole rotation angle detection unit 60.
- the magnetic pole rotational angle of the rotor 52 is calculated using the output of the alternating magnetic sensor 70.
- the magnetic pole rotation angle detection unit 60 is normal when either one of the two-axis magnetic sensor 80 and the alternating magnetic sensor 70 is abnormal and the other is normal.
- the magnetic pole rotation angle of the rotor 52 is calculated using the output of the magnetic sensor of
- a relatively inexpensive and small sensor is used to output It is possible to provide a method of detecting the magnetic pole rotational position without limiting the layout of the shaft.
- a pulser ring similar to a general brushless motor using an alternating type magnetic sensor is detected using an inexpensive 2-axis magnetic sensor compared to a high-speed high-precision expensive resolver or the like.
- the magnetic pole angle can be detected with high resolution without limiting the layout of the motor output shaft.
- the delay and operation time of the 2-axis magnetic sensor cause deterioration of motor performance at high speed rotation
- mount an alternating magnetic sensor (NS pole switch type) with the same pulser ring as the detection target
- the motor performance is prevented from deteriorating by performing position estimation by interpolation based on the elapsed time from the switch switching timing, which is the method of Since these sensors can be mounted on the circumference of the substrate opposed to a single pulser ring to be detected, an increase in motor size can be avoided.
- motor rotation with certain performance can be performed, and therefore, improvement in safety at the time of failure due to duplexing of the magnetic pole detection sensor can be expected.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
モータ駆動システム(10)は、モータ(50)と、2軸磁気センサ(80)と、交番型磁気センサ(70)と、磁極回転角検出部(60)と、モータ制御装置(20)とを備える。交番型磁気センサ(70)および2軸磁気センサ(80)は、ステータとの位置関係が固定された基板に配置される。交番型磁気センサ(70)は、モータ(50)のコイルの相数と同個数以上のホールセンサ(71~73)を含む。磁極回転角検出部(60)は、2軸磁気センサ(80)および交番型磁気センサ(70)の出力を受けてロータの磁極回転角度を検出する。モータ制御装置(20)は、磁極回転角検出部(60)によって検出されたロータの磁極回転角度を用いてコイルの電流を制御する。このようにして、コストの上昇を抑えつつ、ブラシレスモータの極低速時、回転停止時のトルク変動を軽減する。
Description
本発明は、多相ブラシレスモータを含むモータ駆動システムおよび多相ブラシレスモータの制御方法に関する。
ブラシレスモータの駆動制御方法としては、ロータ回転の電気角60度ごとに通電パターンを変化させる矩形波駆動方式と、回転に同期した正弦波で駆動する正弦波駆動方式がある。正弦波駆動は矩形波駆動よりも駆動効率が良く、またトルク変動が少ないため低振動低騒音である。これらの駆動制御を行なうためには、ロータ回転に同期して駆動電圧を発生するための磁極検出センサを用いる。
ブラシレスモータの磁極検出には、安価なホールICなどの交番型磁気センサ(N-Sスイッチ型)を複数用いることが一般的である。これらのセンサを用いて正弦波駆動を行なうには、センサが検出するタイミングからの経過時間をもとにした補間によって磁極位置を推定する必要がある。
特開2003-009579号公報(特許文献1)では、一定の回転以上で磁極位置を補間演算により推定し、それ未満の極低速時には補間演算を行わず、検出位置における固定の角度数値を用いる。また、特開2007-110781号公報(特許文献2)では、極低速時や停止時に電流値を増加補正することでトルクの低下を防止している。
交番型磁気センサを複数用いる方式およびセンサレス駆動方式では、モータが回転し続ける用途では補間が可能だが、モータを動力とした位置制御やトルク制御などを行なうアクチュエータとしての用途などでは、モータの回転が不規則になったり断続的になったりするので、補間が行えない場合がある。このような場合は矩形波駆動を用いることになるが、トルク変動が大きくなる問題がある。
たとえば、特開2003-009579号公報(特許文献1)に開示される方法では、極低速時には補間演算を行わず、検出位置における固定の角度数値を離散的に用いるため、極低速時のトルク変動を抑えることができない。
また、特開2007-110781号公報(特許文献2)に開示される方法では、極低速時や停止時に電流値を増加補正すると、回転位置によっては逆にトルクが増加する問題が残り、電流-トルク特性のリニアリティが確保できない。
トルク変動やリニアリティ不良が許容できないときは、ストール状態から高精度に回転位置検出が可能で、かつ高速なレゾルバなどを用いるのが一般的である。しかし、レゾルバは構造が複雑で、専用の駆動回路も必要なため、モータを含めたシステムが大型で高価になることが避けられない。
この発明は、上記の課題を解決するためになされたものであって、その目的は、比較的安価かつ小型のセンサを用いつつ、極低速時、回転停止時のトルク変動を軽減することができるモータ駆動システムおよびモータの制御方法を提供することである。
この発明は、要約すると、モータ駆動システムであって、複数相のコイルが巻回されたステータと、ステータに対して回転軸の回りに回転するロータと、ロータに固定され、環状にN極とS極が交互に位置するように磁石が配置されるパルサリングと、ステータとの位置関係が固定された部材に配置される2軸磁気センサと、部材に配置された、コイルの相数と同個数以上の交番型磁気センサと、2軸磁気センサおよび交番型磁気センサの出力を受けてロータの磁極回転角度を検出する磁極回転角検出部と、磁極回転角検出部によって検出されたロータの磁極回転角度を用いてコイルの電流を制御するモータ制御装置とを備える。
好ましくは、磁極回転角検出部は、ロータの回転速度がしきい値より低い場合には、2軸磁気センサの出力を用いてロータの磁極回転角度を算出し、ロータの回転速度がしきい値より高い場合には、交番型磁気センサの出力を用いてロータの磁極回転角度を算出する。
好ましくは、磁極回転角検出部は、2軸磁気センサと交番型磁気センサのいずれか一方が異常で、他方が正常である場合には、正常である方の磁気センサの出力を用いてロータの磁極回転角度を算出する。
この発明は、他の局面ではモータの制御方法である。モータは、複数相のコイルが巻回されたステータと、ステータに対して回転軸の回りに回転するロータと、ロータに固定され、環状にN極とS極が交互に位置するように磁石が配置されるパルサリングと、ステータと位置関係が固定された部材に配置される2軸磁気センサと、部材に配置された、コイルの相数と同個数以上の交番型磁気センサとを備える。制御方法は、ロータの回転速度がしきい値より低い場合には、2軸磁気センサの出力を用いてロータの磁極回転角度を算出し、ロータの回転速度がしきい値より高い場合には、交番型磁気センサの出力を用いてロータの磁極回転角度を算出するステップと、検出されたロータの磁極回転角度を用いてコイルの電流を制御するステップとを備える。
本発明によれば、多相ブラシレスモータにおいて、コストの増加を抑えつつ極低速時、回転停止時のトルク変動を軽減することができる。
以下、本発明の実施の形態について図面を参照しつつ説明する。なお、以下の図面において同一または相当する部分には同一の参照番号を付し、その説明は繰返さない。
[実施の形態1]
図1は、実施の形態1に係る多相ブラシレスモータの概略構成を示すブロック図である。図1を参照して、モータ駆動システム10は、モータ制御装置20と、ドライブ回路30と、インバータ40と、三相ブラシレスDCモータ(以下、「モータ」と)50と、磁極回転角検出部60と、交番型磁気センサ70と、2軸磁気センサ80と、電流センサ90とを含む。
図1は、実施の形態1に係る多相ブラシレスモータの概略構成を示すブロック図である。図1を参照して、モータ駆動システム10は、モータ制御装置20と、ドライブ回路30と、インバータ40と、三相ブラシレスDCモータ(以下、「モータ」と)50と、磁極回転角検出部60と、交番型磁気センサ70と、2軸磁気センサ80と、電流センサ90とを含む。
モータ制御装置20は、電流センサ90が検出したモータ50の各相コイルの電流値と、磁極回転角検出部60が検出したモータ50のロータの磁極回転角と、与えられた指令値とに基づいて、ドライブ回路30を制御する。モータ制御装置20は、回転数、トルク、モータのロータに連動する被駆動体の位置などに基づいて与えられる指令値から電流指令値を生成し、PWM処理を行なってドライブ回路30の駆動信号を生成する。
ドライブ回路30は、モータ制御装置20から受信したPWM信号に基づき、インバータ40内の6つのパワースイッチング素子をそれぞれオン/オフ作動させるための制御パルスを発生させて、インバータ40に送信する。インバータ40内の6つのパワースイッチング素子がオン/オフ作動することによって、U相,V相,W相の通電路からステータコイルに駆動電流が流れ、モータ50が回転駆動される。
交番型磁気センサ70は、ホールセンサ71~73を含む。ホールセンサ71~73の各々は、磁極のN極、S極により出力が2値に切り替わる。2軸磁気センサ80は、後述するように、モータ50内で磁界の方向を検出する。磁極回転角検出部60は、交番型磁気センサ70の出力および2軸磁気センサ80の出力を受ける。
図2は、モータ50の主要部品を示した投影図である。図3は、モータ50の主要部品の展開図である。図2、図3を参照して、モータ50は、ステータ51と、ステータ51に対して回転軸の回りに回転するロータ52と、ロータ52に固定され、環状にN極とS極が交互に位置するように磁石が配置されるパルサリング53と、ステータ51と位置関係が固定された部材(たとえばステータ51が固定される図示しないモータケースに固定された基板54)とを含む。
ステータ51は、電磁鋼板等の磁性体で形成されたステータコア51Aと、ステータコア51Aに巻回されているスター結線された3つの信号相であるU相、V相、W相のステータコイル51Bとを含む。ロータ52は、ロータコア52Aと、ロータコア52Aの外周に配置された永久磁石52Bとを含む。
パルサリング53は、ロータの永久磁石52Bと同数のN極、S極に磁石が配置され、基板54との距離が一定となるように配置されている。
なお、図2および図3に例示したのは、中空のロータ52を有するモータであるが、ロータ52は必ずしも中空でなくてもよく、モータの出力軸である回転シャフトに固定されているものでも良い。
図4は、基板54の形状を示す図である。図4に示すように、基板54には、図1の交番型磁気センサ70と、2軸磁気センサ80とが配置されている。
交番型磁気センサ70は、ホールセンサ71~73によって、ロータ52の回転に伴って回転するパルサリング53上の磁石の位置を検出し、所定の角度(たとえば60°)ごとに磁極位置情報としての位置検出信号PU、PV、PWを出力する。
磁極回転角検出部60は、ホールセンサ71~73から受けた位置検出信号PU、PV、PWの信号レベルの組み合せに基づいて6つの検出パルスを発生させ、各検出パルスに基づいて磁極位置を検出するように構成される。ホールセンサ71~73は交番検知、すなわち磁極の極性の切り替わりに応じて出力のハイレベル/ローレベルが切り替わる。ホールセンサ71~73は磁石が離れた後も最後に接近していた磁極の極性を覚えている。このようなホールセンサは、ブラシレスモータのコイル切替えに従来から用いられている。
一方、2軸磁気センサ80は、被検出点となる空間中のある点における磁界を検出する。このような磁気センサは、それぞれが直交した検出軸の数によって検出する空間の次数が定まり、2軸では2次元平面、3軸では3次元空間におけるベクトルとして磁界を検出できる。本実施の形態では、回転磁界を検出するために、図1のように2軸磁気センサ80を用いる。
図5は、2軸磁気センサの検出するベクトルを説明するための図である。図6は、2軸磁気センサの出力波形の第1例を示す図である。図7は、2軸磁気センサの出力波形の第2例を示す図である。図5のようにマグネットMが2軸磁気センサ80の近くに配置されると、被検出点Pにおける磁界の向きと大きさが2軸磁気センサ80から出力される。2軸磁気センサ80は、XY平面におけるベクトルDを示す情報を出力する。マグネットMがZ軸を回転軸として回転するとベクトルDも磁界の向きに合わせて回転する。
2軸磁気センサは、たとえば複数のホール素子と信号処理回路とが集積されたICとして提供され、図6に示すように、X軸、Y軸のそれぞれの磁界強度を出力するタイプ(タイプA)と、図7に示すように、内部演算によって磁界ベクトルの角度θを出力するタイプ(タイプB)がある。一定の角速度で回転する磁界に対し、タイプAのセンサの出力は正弦波(sin波)と余弦波(cos波)であり、タイプBのセンサの出力はのこぎり波となる。X軸、Y軸のそれぞれの磁界強度を出力する場合(タイプA)は、センサの後段で検出した磁界のベクトルを演算により求める必要がある。磁界ベクトルの角度を出力する場合(タイプB)、演算はセンサ内部の信号処理回路で行われ、出力のスカラ量が角度そのものを表すので、センサの後段で演算を行なう必要がない。また、リニアリティの補正を行えるセンサも市販されている。ただし、このタイプでは演算のための検出遅延が発生する。
次に、2軸磁気センサ80を用いてパルサリング53による磁極位置検出を行なう原理を解説する。図8は、パルサリング53の一部を拡大して示した図である。図9は、パルサリング53に沿って2軸磁気センサ80の相対位置が変化する様子を示した模式図である。
図8、図9に示すように周方向に沿って磁石のN極とS極が交互に並んでいるとき、ロータ52が回転すると磁石の並びの方向に沿って2軸磁気センサ80が相対移動する。磁界の方向を磁力線で表すと、2軸磁気センサ80の検出点P1~P5おける磁力線の方向は、センサと磁石の相対移動によってN極とS極の1対分が通過すると1回転する。通常の交番型磁力センサ(N-Sスイッチ)に用いるのと同様にパルサリング53の磁極をロータの磁極と同期して円周状に配置し、さきほどの例と同様に磁界の方向を検出すると、この周期はモータの電気角の周期と一致する。すなわち、ロータ52が1極対分回転移動すると電気角が1回転し、これに同期して2軸磁気センサ80による検出角も1回転する。このようにして、2軸磁気センサ80により電気角を検出できる。
再び図3、図4を参照して本実施の形態に係る3相ブラシレスモータの構成を説明する。磁極検出における被検出体であるパルサリング53がロータ52とともに回転し、検出部である3相の交番型磁気センサ70(3個のホールセンサ71~73)と1個の2軸磁気センサ80がパルサリング53に正対して基板54に固定されている。基板54は、ステータ51とともに図示しないモータケースに固定されている。このように検出部と被検出部がスラスト方向に配置された場合、2軸磁気センサは、パルサリング53により発生する磁界のうち、パルサリング53の表面に直交し円周接線と平行な平面上の成分(図9に矢印で示す)を検出する。
2軸磁気センサ80によって検出される磁界の向きは360°の回転角度で表され、ロータ52が1回転すると極対数の回数だけ回転する。図3の例では、極対数は6であるので、ロータ52が1回転すると2軸磁気センサ80の検出角は6回転する。また、ロータの機械角1回転に対し電気角は極対数の回数だけ回転し、この電気角を正確に検出することでトルク変動の少ないモータ制御を実現できる。パルサリング53の磁石の配置をロータ52の磁石の配置に対応させておけば、検出される磁界の向きは電気角の回転に一意に対応し、検出された磁界の向きを電気角に変換することで、電気角を正確に算出することができる。
なお、図3、図4、図9で示されるパルサリング53と2軸磁気センサ80の位置関係では、磁極回転角と2軸磁気センサ80の検出角の周期は一致するものの、磁極回転角と2軸磁気センサ80の検出角は直線関係にはならない。図10は、磁極回転角と2軸磁気センサ80の検出角の関係の一例を示す図である。図10のようにそれぞれの角度の推移は一致しないので、検出角から電気角を求める変換が必要である。この変換は2軸磁気センサ80のリニアリティ補正機能を用いて行ってもよいし、2軸磁気センサ80の後段で演算を行ってもよい。
2軸磁気センサ80を使用することによって、ストール時や極低速時にも電気角を知ることができるので、ストール時や極低速時にも正弦波駆動を行なうことができる。図11は、ストール状態でのモータ回転位置によるトルク変動特性について、正弦波駆動と矩形波駆動で比較して示した図である。図11に示すように、正弦波駆動の方が矩形波駆動のときよりもストールトルクの変動が抑えられている。したがって、正弦波駆動を行なうことによって、ストール時や極低速時にトルク変動が低減する。
また、2軸磁気センサ80は、既存の基板54に実装すれば良いので、レゾルバなどを追加する場合のように出力軸のレイアウトを制限しない。本実施の形態のモータ駆動システムによれば、安価な2軸磁気センサ80を使用して、ストール状態でも正弦波駆動を用いることが可能となり、交番型磁気センサを使用するよりもトルク変動を改善することができる。
しかし、2軸磁気センサ80は、演算処理をセンサ内で行なう場合は検出に遅れが発生したり、後段で行なう場合は演算に時間がかかることにより、高速回転時のモータ性能の劣化を引き起こしたりする可能性がある。
図12は、同じモータにおいて、磁極検出に2軸磁気センサを使用した場合と交番型磁気センサを使用した場合とのN-T特性を比較して示した図である。図12に示されるように、回転速度とトルクの関係を示すN-T特性は、ストールから回転速度N1までの低回転領域では2軸磁気センサ80を用いる方(W80)が良く、回転速度N1を超えた高回転領域では交番型磁気センサ70を用いる方(W70)が良い。
そこで、一定の回転数を超えたとき、従来から用いられている3相交番型磁気センサ70による検出方法に切り替えることが好ましい。2種類の磁気センサを使用することによって、高速回転時においてもモータ性能が劣化することを防止することができる。
図12における回転速度N1を境にして2種類のセンサを切り替えることで、ストール状態から高回転まで良好なモータ特性を得ることができる。図13は、実施の形態1の磁極回転角検出部60の切替え処理を説明するためのフローチャートである。図13を参照して、ステップS1において、磁極回転角検出部60は、現在の回転速度がN1より低いか否かを判断する。回転速度がN1より低ければ(S1でYES)、磁極回転角検出部60は、2軸磁気センサ80の出力から磁極位置を検出する。一方、回転速度がN1以上であれば(S1でNO)、磁極回転角検出部60は、交番型磁気センサ70の出力から磁極位置を検出する。ステップS2、S3のいずれかで磁極位置が検出されたら、ステップS4に処理が進められる。図1のモータ制御装置20では、検出された磁極位置を使用したモータ制御が実行される。
なお、このとき、3相交番型ホールセンサの代わりにセンサレス制御を用いることもできる。一般的にセンサレス制御では、モータ回転開始時の制御が複雑でモータ性能も限定されるが、回転開始時に2軸磁気センサ80による磁極検出を併用することで、これらの欠点を補うことができる。
[実施の形態2]
実施の形態1では、2種類の磁気センサを回転速度に応じて切換えて使用することについて説明した。実施の形態2では、信頼性を向上させるために冗長構成とした2種類の磁気センサを使用する。
実施の形態1では、2種類の磁気センサを回転速度に応じて切換えて使用することについて説明した。実施の形態2では、信頼性を向上させるために冗長構成とした2種類の磁気センサを使用する。
図12のN‐T特性に見られるように、モータ性能が多少低下する領域があるが、どちらかのセンサのみでも一定の性能を満たしたモータ作動に問題はない。この冗長性により、たとえば車載用途において、故障発生時に縮退運転を行なう事が可能となり、安全性の向上を得ることができる。
図14は、実施の形態2の磁極回転角検出部60の切替え処理を説明するためのフローチャートである。図14を参照して、ステップS11において、磁極回転角検出部60は、現在の回転速度がN1より低いか否かを判断する。回転速度がN1より低ければ(S11でYES)、ステップS12において、磁極回転角検出部60は、2軸磁気センサ80の出力が正常であるか否かを判断する。たとえば、2軸磁気センサ80の出力が0Vに固定されたような場合には断線が疑われるので、磁極回転角検出部60は2軸磁気センサ80の出力が正常でないと判断する。ステップS12において2軸磁気センサ80の出力が異常であると判断された場合(S12でNO)、ステップS13において磁極回転角検出部60は、交番型磁気センサ70の出力が正常であるか否かを判断する。
一方、ステップS11において回転速度がN1以上であれば(S11でNO)、ステップS14において磁極回転角検出部60は交番型磁気センサ70の出力が正常であるか否かを判断する。たとえば、交番型磁気センサ70の出力の少なくとも1つが0Vに固定されたような場合には、断線が疑われるので磁極回転角検出部60は、交番型磁気センサ70の出力が正常でないと判断する。ステップS14において交番型磁気センサ70の出力が異常であると判断された場合(S14でNO)、ステップS15において磁極回転角検出部60は、2軸磁気センサ80の出力が正常であるか否かを判断する。
ステップS12またはステップS15において、2軸磁気センサ80の出力が正常と判断された場合、磁極回転角検出部60は2軸磁気センサ80の出力から磁極位置を検出する(S16)。一方ステップS13またはステップS14において、交番型磁気センサ70の出力が正常と判断された場合、磁極回転角検出部60は交番型磁気センサ70の出力から磁極位置を検出する(S17)。
ステップS16、S17のいずれかで磁極位置が検出されたら、ステップS18に処理が進められる。図1のモータ制御装置20では、検出された磁極位置を使用したモータ制御が実行される。
一方、交番型磁気センサ70の出力が正常でないと判断された場合(S13でNO)または2軸磁気センサ80の出力が正常でないと判断された場合(S15でNO)、磁極回転角検出部60は磁気センサ不良エラー表示を出力し(S19)、モータ制御装置にモータを停止させ(S20)、磁極回転角の検出処理を終了する(S21)。
[応用例]
図15は、モータ駆動システムの応用例を示した図である。図15を参照して、モータ駆動システム110は、図1のモータ駆動システム10に直動機構130を組み込んだものである。モータ駆動システム110は、モータ駆動システム10の構成に加えて、モータ50のロータの回転を減速させる減速機120と、直動機構130と、ストロークセンサ140とをさらに備える。
図15は、モータ駆動システムの応用例を示した図である。図15を参照して、モータ駆動システム110は、図1のモータ駆動システム10に直動機構130を組み込んだものである。モータ駆動システム110は、モータ駆動システム10の構成に加えて、モータ50のロータの回転を減速させる減速機120と、直動機構130と、ストロークセンサ140とをさらに備える。
直動機構130は、減速機120に連結されたボールねじナット131と回転が規制されたボールねじシャフト132とを含む。減速機120によってボールねじナット131が回転されると、ボールねじシャフト132が回転方向に応じて前進または後退をするようにストローク量Xが変化する。ストロークセンサ140は、ボールねじシャフト132のストローク量Xを検出し、モータ制御装置20Aに出力する。モータ制御装置20Aは、ストローク量Xが指令値と一致するようにモータ50の回転を制御する。
このような用途では、モータ50は常時回転しているわけではなく、回転と停止とを頻繁に繰り返すことが多い。このような用途では、本実施の形態のモータ駆動システムを用いることにより、直動機構においても安定した推力を得ることが可能となる。
最後に、再び図面を参照して、実施の形態1,2について総括する。図1~図4を参照して、モータ駆動システム10は、複数相のステータコイル51Bが巻回されたステータ51と、ステータ51に対して回転軸の回りに回転するロータ52と、ロータ52に固定され、環状にN極とS極が交互に位置するように磁石が配置されるパルサリング53と、2軸磁気センサ80と、交番型磁気センサ70と、磁極回転角検出部60と、モータ制御装置20とを備える。2軸磁気センサ80は、ステータ51との位置関係が固定された基板54に配置される。交番型磁気センサ70は、基板54に配置された、ステータコイル51Bの相数と同個数以上のホールセンサ71~73を含む。磁極回転角検出部60は、2軸磁気センサ80および交番型磁気センサ70の出力を受けてロータの磁極回転角度を検出する。モータ制御装置20は、磁極回転角検出部60によって検出されたロータ52の磁極回転角度を用いてコイルの電流を制御する。
好ましくは、図13に示すように、磁極回転角検出部60は、ロータ52の回転速度がしきい値N1より低い場合には、2軸磁気センサ80の出力を用いてロータ52の磁極回転角度を算出し、ロータ52の回転速度がしきい値N1より高い場合には、交番型磁気センサ70の出力を用いてロータ52の磁極回転角度を算出する。
好ましくは、図14に示すように、磁極回転角検出部60は、2軸磁気センサ80と交番型磁気センサ70のいずれか一方が異常で、他方が正常である場合には、正常である方の磁気センサの出力を用いてロータ52の磁極回転角度を算出する。
以上説明したように、本実施の形態によれば、ブラシレスモータがストール状態から高回転状態にわたって効率やトルク変動において優れる正弦波駆動を行なうために、比較的安価で小型なセンサを用いて、出力軸のレイアウトを制限することなく磁極回転位置を検出する方法を提供することができる。
また、高速高精度の高価なレゾルバなどに比べて安価な2軸磁気センサを用いて、交番型磁気センサ(N-S極スイッチ型)を用いた一般的なブラシレスモータと同様のパルサリングを被検出体とすることで、モータ出力軸のレイアウトを制限せず、磁極角度を高分解能に検出することができる。
また、高速回転時に2軸磁気センサの遅延や演算時間がモータ性能の劣化を引き起こす場合は、同じパルサリングを被検出体とした交番型磁気センサ(N-S極スイッチ型)を実装し、従来通りの手法であるスイッチの切り替わりのタイミングからの経過時間をもとにした補間による位置推定を行なうことで、モータ性能の劣化を防止する。これらのセンサは被検出体である単一のパルサリングに対向する基板の円周上に実装できるため、モータサイズの増大を避けることができる。また、2軸磁気センサと交番型磁気センサのどちらかのみを用いても、一定の性能を確保したモータ回転は可能なので、磁極検出センサの二重化による故障時の安全性の向上も期待できる。
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
10,110 モータ駆動システム、20,20A モータ制御装置、30 ドライブ回路、40 インバータ、50 モータ、51 ステータ、51A ステータコア、51B ステータコイル、52 ロータ、52A ロータコア、52B 永久磁石、53 パルサリング、54 基板、60 磁極回転角検出部、70 交番型磁気センサ、71,73 ホールセンサ、80 2軸磁気センサ、90 電流センサ、120 減速機、130 直動機構、131 ボールねじナット、132 ボールねじシャフト、140 ストロークセンサ。
Claims (4)
- 複数相のコイルが巻回されたステータと、
前記ステータに対して回転軸の回りに回転するロータと、
前記ロータに固定され、環状にN極とS極が交互に位置するように磁石が配置されるパルサリングと、
前記ステータとの位置関係が固定された部材に配置される2軸磁気センサと、
前記部材に配置された、前記コイルの相数と同個数以上の交番型磁気センサと、
前記2軸磁気センサおよび前記交番型磁気センサの出力を受けて前記ロータの磁極回転角度を検出する磁極回転角検出部と、
前記磁極回転角検出部によって検出された前記ロータの磁極回転角度を用いて前記コイルの電流を制御するモータ制御装置とを備える、モータ駆動システム。 - 前記磁極回転角検出部は、前記ロータの回転速度がしきい値より低い場合には、前記2軸磁気センサの出力を用いて前記ロータの磁極回転角度を算出し、前記ロータの回転速度がしきい値より高い場合には、前記交番型磁気センサの出力を用いて前記ロータの磁極回転角度を算出する、請求項1に記載のモータ駆動システム。
- 前記磁極回転角検出部は、前記2軸磁気センサと前記交番型磁気センサのいずれか一方が異常で、他方が正常である場合には、正常である方の磁気センサの出力を用いて前記ロータの磁極回転角度を算出する、請求項1または2に記載のモータ駆動システム。
- モータの制御方法であって、
前記モータは、
複数相のコイルが巻回されたステータと、
前記ステータに対して回転軸の回りに回転するロータと、
前記ロータに固定され、環状にN極とS極が交互に位置するように磁石が配置されるパルサリングと、
前記ステータと位置関係が固定された部材に配置される2軸磁気センサと、
前記部材に配置された、前記コイルの相数と同個数以上の交番型磁気センサとを備え、
前記制御方法は、
前記ロータの回転速度がしきい値より低い場合には、前記2軸磁気センサの出力を用いて前記ロータの磁極回転角度を算出し、前記ロータの回転速度がしきい値より高い場合には、前記交番型磁気センサの出力を用いて前記ロータの磁極回転角度を算出するステップと、
検出された前記ロータの磁極回転角度を用いて前記コイルの電流を制御するステップとを備える、モータの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18855250.9A EP3683954A4 (en) | 2017-09-15 | 2018-09-14 | ENGINE CONTROL SYSTEM AND ENGINE CONTROL PROCESS |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-177716 | 2017-09-15 | ||
| JP2017177716A JP2019054656A (ja) | 2017-09-15 | 2017-09-15 | モータ駆動システムおよびモータの制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019054475A1 true WO2019054475A1 (ja) | 2019-03-21 |
Family
ID=65722782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/034169 WO2019054475A1 (ja) | 2017-09-15 | 2018-09-14 | モータ駆動システムおよびモータの制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3683954A4 (ja) |
| JP (1) | JP2019054656A (ja) |
| WO (1) | WO2019054475A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114389505A (zh) * | 2020-10-21 | 2022-04-22 | 三菱电机株式会社 | 电流检测装置以及交流旋转电机的控制装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7329466B2 (ja) * | 2020-02-18 | 2023-08-18 | 日立Astemo株式会社 | 回転角センサの校正方法 |
| WO2024025848A1 (en) * | 2022-07-24 | 2024-02-01 | Navia Energy Inc. | Controlled energy system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0854254A (ja) * | 1994-08-15 | 1996-02-27 | Sankyo Seiki Mfg Co Ltd | アブソリュートエンコーダ |
| JP2003009579A (ja) | 2001-06-21 | 2003-01-10 | Nissan Motor Co Ltd | 電動機の制御装置及び制御方法 |
| JP2005318724A (ja) * | 2004-04-28 | 2005-11-10 | Nsk Ltd | モータ駆動装置及び電動パワーステアリング装置 |
| JP2007110781A (ja) | 2005-10-11 | 2007-04-26 | Aisin Aw Co Ltd | モータ制御装置 |
| WO2011111617A1 (ja) * | 2010-03-10 | 2011-09-15 | Ntn株式会社 | 電気自動車のモータ駆動システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5633546A (en) * | 1993-12-30 | 1997-05-27 | Emerson Electric Co. | Magnetic sensor for switched reluctance motor |
| JP2000162222A (ja) * | 1998-11-26 | 2000-06-16 | Ntn Corp | 回転速度検出装置付き車輪軸受装置 |
| JP4719218B2 (ja) * | 2005-06-13 | 2011-07-06 | シナノケンシ株式会社 | 開閉体駆動装置 |
| JP4404160B2 (ja) * | 2008-01-21 | 2010-01-27 | ダイキン工業株式会社 | モータ駆動制御装置 |
-
2017
- 2017-09-15 JP JP2017177716A patent/JP2019054656A/ja active Pending
-
2018
- 2018-09-14 WO PCT/JP2018/034169 patent/WO2019054475A1/ja unknown
- 2018-09-14 EP EP18855250.9A patent/EP3683954A4/en not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0854254A (ja) * | 1994-08-15 | 1996-02-27 | Sankyo Seiki Mfg Co Ltd | アブソリュートエンコーダ |
| JP2003009579A (ja) | 2001-06-21 | 2003-01-10 | Nissan Motor Co Ltd | 電動機の制御装置及び制御方法 |
| JP2005318724A (ja) * | 2004-04-28 | 2005-11-10 | Nsk Ltd | モータ駆動装置及び電動パワーステアリング装置 |
| JP2007110781A (ja) | 2005-10-11 | 2007-04-26 | Aisin Aw Co Ltd | モータ制御装置 |
| WO2011111617A1 (ja) * | 2010-03-10 | 2011-09-15 | Ntn株式会社 | 電気自動車のモータ駆動システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3683954A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114389505A (zh) * | 2020-10-21 | 2022-04-22 | 三菱电机株式会社 | 电流检测装置以及交流旋转电机的控制装置 |
| CN114389505B (zh) * | 2020-10-21 | 2024-01-05 | 三菱电机株式会社 | 电流检测装置以及交流旋转电机的控制装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019054656A (ja) | 2019-04-04 |
| EP3683954A4 (en) | 2021-04-14 |
| EP3683954A1 (en) | 2020-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4483009B2 (ja) | モータ制御装置 | |
| JP5131318B2 (ja) | モータ制御装置 | |
| JP5494662B2 (ja) | 回転角検出装置 | |
| JP4879649B2 (ja) | 電動機の制御装置 | |
| JP5502605B2 (ja) | モータ制御装置 | |
| US6639371B2 (en) | Method and system for controlling start of a permanent magnet machine | |
| JP2003509999A (ja) | 電動パワーステアリングシステム用のインデックスパルスを確実に生成するための方法及び装置 | |
| US6774592B2 (en) | Method and system for controlling a permanent magnet machine | |
| WO2019054475A1 (ja) | モータ駆動システムおよびモータの制御方法 | |
| JP5653898B2 (ja) | 永久磁石モータ制御装置 | |
| WO2018021176A1 (ja) | センサ故障検出方法、モータ駆動システムおよび電動パワーステアリングシステム | |
| JP6844617B2 (ja) | モータモジュール、モータステップ動作制御システム、およびモータ制御装置 | |
| JPWO2018229842A1 (ja) | ブラシレスdcサーボモータの制御装置 | |
| US20150102758A1 (en) | Motor drive controller, motor drive control method and motor system using the same | |
| KR101655297B1 (ko) | 리니어 홀 센서 위치보정장치 및 그 위치보정방법 | |
| JP2004194490A (ja) | ブラシレスモータ制御方法 | |
| JP5978924B2 (ja) | モータ駆動装置および真空ポンプ | |
| WO2020066946A1 (ja) | モータ装置 | |
| JP6619382B2 (ja) | モータ駆動制御装置及びモータ駆動制御装置の制御方法 | |
| JP2011117769A (ja) | 回転角検出装置、モータ制御装置、および電動パワーステアリング装置 | |
| JP2021197895A (ja) | 3相ブラシレスモーター及び3相ブラシレスモーターの回転位置検出方法 | |
| JPWO2020059759A1 (ja) | モータ駆動制御装置、モータユニット、及びアクチュエータ | |
| TWI511439B (zh) | 一種發電機裝置及自體振動抑制方法 | |
| JP2006033928A (ja) | ブラシレスモータ | |
| JP2010246231A (ja) | モータ制御装置および電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18855250 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018855250 Country of ref document: EP Effective date: 20200415 |