WO2019026830A1 - アスファルトフィニッシャ - Google Patents
アスファルトフィニッシャ Download PDFInfo
- Publication number
- WO2019026830A1 WO2019026830A1 PCT/JP2018/028413 JP2018028413W WO2019026830A1 WO 2019026830 A1 WO2019026830 A1 WO 2019026830A1 JP 2018028413 W JP2018028413 W JP 2018028413W WO 2019026830 A1 WO2019026830 A1 WO 2019026830A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- controller
- screed
- wireless communication
- tractor
- asphalt finisher
- Prior art date
Links
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/48—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C2301/00—Machine characteristics, parts or accessories not otherwise provided for
- E01C2301/14—Extendable screeds
- E01C2301/16—Laterally slidable screeds
Definitions
- An asphalt finisher is configured to perform wireless communication between at least two of a plurality of devices mounted on at least one of a tractor, a screed, and the tractor and the screed. And a wireless communication system.
- the control unit 50a controls various devices mounted on the asphalt finisher 100.
- the control unit 50a controls the control valve in accordance with control commands from, for example, the operation panel 51, the rear controller 52, the switch box 53, the pavement thickness control device 54, and the like.
- the control valve controls the flow of hydraulic fluid between the hydraulic pump driven by the engine 11 and the hydraulic actuator.
- the hydraulic actuators include front wheel drive hydraulic motors, rear wheel drive hydraulic motors, screw drive hydraulic motors, conveyor drive hydraulic motors, screed telescopic cylinders, leveling cylinders, screed drift cylinders, hopper cylinders, tamper drive hydraulic motors, vibrators. Including a driving hydraulic motor etc.
- the vibrator is a device that vibrates the screed 3.
- the cooperative system CS may be configured such that wired communication is performed between the controller 50 and the rear controller 52 and wireless communication is performed between the controller 50 and the operation panel 51.
- wired communication is performed between the controller 50 and the rear controller 52, and wireless communication is performed between at least one of the switch box 53, the sensor 54a, and the screed controller, and the rear controller 52. It may be configured to be performed.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Road Paving Machines (AREA)
Abstract
本発明の実施形態に係るアスファルトフィニッシャ(100)は、トラクタ(1)と、スクリード(3)と、トラクタ(1)及びスクリード(3)の少なくとも一方に搭載される複数の機器のうちの少なくとも2つの間で無線通信が行われるように構成される無線通信システムと、を備える。トラクタ(1)に搭載される機器は、コントローラ(50)及び操作盤(51)のうちの少なくとも1つを含み、スクリード(3)に搭載される機器は、リアコントローラ(52)、スイッチボックス(53)、センサ、スクリードコントローラ、及び、電力供給装置(60A)としての振動発電機のうちの少なくとも1つを含む。
Description
本開示は、アスファルトフィニッシャに関する。
従来、スクリードの両端にスイッチボックス(スクリード操作ボックス)が取り付けられたアスファルトフィニッシャが知られている(特許文献1及び2参照。)
通常、スイッチボックスは、トラクタに搭載されたバッテリに電源ケーブルを介して接続され、且つ、トラクタに搭載された制御装置に通信ケーブルを介して接続されている。
通常、スイッチボックスは、トラクタに搭載されたバッテリに電源ケーブルを介して接続され、且つ、トラクタに搭載された制御装置に通信ケーブルを介して接続されている。
しかしながら、電源ケーブル及び通信ケーブルは、スクリードが車幅方向に伸縮できるように構成されているため、スクリードが伸縮されたときに損傷を受けるおそれがある。また、トラクタとスクリードの間にある舗装材の熱による損傷を受けるおそれもある。そして、電源ケーブル又は通信ケーブルが損傷を受けると、トラクタに搭載されている機器とスクリードに搭載されている機器との連携が絶たれるおそれがある。
上述に鑑み、トラクタに搭載されている機器とスクリードに搭載されている機器とをより安定的に連携させるアスファルトフィニッシャを提供することが望ましい。
本発明の実施形態に係るアスファルトフィニッシャは、トラクタと、スクリードと、前記トラクタ及び前記スクリードの少なくとも一方に搭載される複数の機器のうちの少なくとも2つの間で無線通信が行われるように構成される無線通信システムと、を備える。
上述の手段により、トラクタに搭載されている機器とスクリードに搭載されている機器とをより安定的に連携させるアスファルトフィニッシャが提供される。
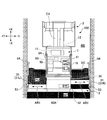
図1は、本発明の実施形態に係る道路機械の一例であるアスファルトフィニッシャ100の側面図である。図2はアスファルトフィニッシャ100の上面図である。アスファルトフィニッシャ100は、主に、トラクタ1、ホッパ2及びスクリード3で構成されている。以下では、トラクタ1から見たホッパ2の方向(+X方向)を前方とし、トラクタ1から見たスクリード3の方向(-X方向)を後方とする。図2のトラクタ1において、運転席1Sを含む運転台がある側(-Y側)を右側とし、その反対側(+Y側)を左側とする。
トラクタ1は、アスファルトフィニッシャ100を走行させるための機構である。本実施形態では、トラクタ1は、後輪走行用油圧モータを用いて後輪5を回転させ、且つ、前輪走行用油圧モータを用いて前輪6を回転させてアスファルトフィニッシャ100を移動させる。後輪走行用油圧モータ及び前輪走行用油圧モータは油圧ポンプから作動油の供給を受けて回転する。後輪5及び前輪6はクローラで置き換えられてもよい。トラクタ1には、エンジン11、発電機12、コントローラ50、操作盤51、電力供給装置60等が搭載されている。
ホッパ2は、舗装材を受け入れるための機構である。本実施形態では、トラクタ1の前方に設置され、ホッパシリンダによってY軸方向(車幅方向)に開閉できるように構成されている。アスファルトフィニッシャ100は、通常、ホッパ2を全開状態にしてダンプトラックの荷台から舗装材(例えばアスファルト混合物である。)を受け入れる。図1及び図2はホッパ2が全開状態であることを示す。ホッパ2内の舗装材が減少するとホッパ2が閉じられ、ホッパ2の内壁付近にあった舗装材がホッパ2の中央部に集められる。ホッパ2の中央部にあるコンベアCVがトラクタ1の後方に舗装材を給送できるようにするためである。トラクタ1の後方に給送された舗装材は、スクリュSCによってトラクタ1の後方且つスクリード3の前方で車幅方向に敷き拡げられる。本実施形態では、スクリュSCは、エクステンションスクリュが左右に連結された状態にある。図1及び図2は、スクリュSCによって敷き拡げられた舗装材PVを粗いドットパターンで示している。
スクリード3は、舗装材PVを敷き均すための機構である。本実施形態では、スクリード3は、前側スクリード30及び後側スクリード31を含む。後側スクリード31は、双方向矢印AR1で示すように、車幅方向(Y軸方向)に伸縮できるように構成されている。具体的には、後側スクリード31は、車幅方向に伸縮可能な左後側スクリード31Lと右後側スクリード31Rを含む。左後側スクリード31L及び右後側スクリード31Rは進行方向(X軸方向)に互いにオフセットされて配置されている。そのため、オフセットされていないときよりも長い幅(車幅方向(Y軸方向)の長さ)を有することができ、車幅方向へより長く伸張でき、より広い新設舗装体を施工することができる。
スクリード3は、トラクタ1によって牽引される浮動スクリードであり、レベリングアーム3Aを介してトラクタ1に連結されている。スクリード3には、リアコントローラ52、スイッチボックス53、舗装厚制御装置54、電力供給装置60A等が搭載されている。図1及び図2は、スクリード3によって敷き均された新設舗装体NPを細かいドットパターンで示している。
次に、図3を参照し、アスファルトフィニッシャ100に搭載される無線通信システムとしての連携システムCSについて説明する。図3は、連携システムCSの構成例を示すブロック図である。連携システムCSは、トラクタ1に搭載されている機器とスクリード3に搭載されている機器とを連携させるシステムであり、主に、トラクタ1に搭載されているコントローラ50及び操作盤51と、スクリード3に搭載されているリアコントローラ52、スイッチボックス53及び舗装厚制御装置54とを含む。
本実施形態では、コントローラ50及び操作盤51は、トラクタ1に搭載された電力供給装置60から電力の供給を受ける。電力供給装置60は、エンジン11によって駆動される発電機12が発電した交流電力を直流電力に変換する。電力供給装置60は、蓄電装置を含んでいてもよい。図3の太点線は電力線を表し、二重線はエンジン11と発電機12とが機械的に連結されていることを表す。
リアコントローラ52及びスイッチボックス53は、スクリード3に搭載された電力供給装置60Aから電力の供給を受ける。電力供給装置60Aは、電力供給装置60から独立した装置であり、例えば、振動発電機、太陽光発電機、温度差発電機、蓄電装置等である。電力供給装置60Aは、着脱式であってもよく、非着脱式であってもよい。電力供給装置60Aは、スイッチを操作する操作者の操作力(運動エネルギ)を利用して発電する自己発電機であってもよい。自己発電機は、スイッチ毎に搭載されていてもよい。この場合、スイッチは、そのスイッチを操作する操作者の操作力から生成された電力を利用してそのスイッチに関する情報を無線で送信できる。蓄電装置を備える必要もない。
舗装厚制御装置54は、アスファルトフィニッシャ100によって敷設される舗装材の厚みを制御する。本実施形態では、舗装厚制御装置54は、内蔵式の電力供給装置60Bから電力の供給を受ける。電力供給装置60Bは、電力供給装置60及び電力供給装置60Aから独立した装置であり、例えば、振動発電機、太陽光発電機、温度差発電機、自己発電機、蓄電装置等である。但し、舗装厚制御装置54は、電力供給装置60又は電力供給装置60Aから電力の供給を受けてもよい。
コントローラ50は、アスファルトフィニッシャ100を制御する制御装置である。本実施形態では、コントローラ50は、CPU、揮発性記憶装置、不揮発性記憶装置等を含むマイクロコンピュータで構成されている。コントローラ50の各種機能は、例えば、不揮発性記憶装置に格納されたプログラムをCPUが実行することで実現される。
コントローラ50は、機能要素として制御部50a及び通信部50bを含む。制御部50a及び通信部50bは、ソフトウェア、ハードウェア又はそれらの組み合わせで構成される。
制御部50aは、アスファルトフィニッシャ100に搭載されている各種機器を制御する。制御部50aは、例えば、操作盤51、リアコントローラ52、スイッチボックス53、舗装厚制御装置54等からの制御指令に応じて制御弁を制御する。制御弁は、エンジン11によって駆動される油圧ポンプと油圧アクチュエータとの間の作動油の流れを制御する。油圧アクチュエータは、前輪駆動用油圧モータ、後輪駆動用油圧モータ、スクリュ駆動用油圧モータ、コンベア駆動用油圧モータ、スクリード伸縮シリンダ、レベリングシリンダ、スクリードリフトシリンダ、ホッパシリンダ、タンパ駆動用油圧モータ、バイブレータ駆動用油圧モータ等を含む。バイブレータは、スクリード3を振動させる装置である。
通信部50bは、コントローラ50と、トラクタ1及びスクリード3のそれぞれに搭載されている機器との無線通信を制御する。本実施形態では、通信部50bは、Bluetooth(登録商標)、Wi-Fi(登録商標)等の無線通信規格を利用し、トラクタ1に搭載されたコントローラ50と操作盤51との間の無線通信を制御する。また、通信部50bは、コントローラ50と、スクリード3に搭載されたリアコントローラ52、スイッチボックス53及び舗装厚制御装置54のそれぞれとの間の無線通信を制御する。
操作盤51は、操作者の入力に応じて制御指令を生成し、その制御指令をコントローラ50に対して出力する。操作盤51は、スイッチ51a、モニタ51b及び通信部51cを含む。本実施形態では、操作盤51は、運転台において運転席1Sの前方に取り付けられている。
スイッチ51aは、アスファルトフィニッシャ100を制御するために操作者が操作する操作装置の一例である。スイッチ51aは、例えば、コンベアCVのオン・オフを切り換えるスイッチ、スクリュSCのオン・オフを切り換えるスイッチ、後側スクリード31の伸張・収縮・オフを切り換えるスイッチ、ホッパ2の開・閉・オフを切り換えるスイッチ等を含む。スイッチは、トグルスイッチ、ロッカースイッチ、ロータリスイッチ、プッシュスイッチ、スライドスイッチ、レバースイッチ等で構成される。操作盤51は、ダイヤル、ジョイスティック等の他の操作装置を含んでいてもよい。
モニタ51bは、各種情報を表示する。本実施形態では、モニタ51bは、カラー液晶ディスプレイである。タッチパネルが装着されていてもよい。
通信部51cは、操作盤51とコントローラ50との無線通信を制御する。但し、操作盤51は通信ケーブルを介してコントローラ50に接続されていてもよい。この場合、通信部51cは、コントローラ50の通信部50bと共に、コントローラ50と操作盤51との間の有線通信を制御する。
リアコントローラ52は、操作者の入力に応じて制御指令を生成し、その制御指令をコントローラ50に対して出力する。本実施形態では、リアコントローラ52は、操作盤51と同様にスイッチ52a、モニタ52b及び通信部52cを有し、スクリード3の中央部に取り付けられている。但し、リアコントローラ52は省略されてもよい。
通信部52cは、リアコントローラ52とコントローラ50との無線通信を制御する。但し、リアコントローラ52は通信ケーブルを介してコントローラ50に接続されていてもよい。この場合、通信部52cは、コントローラ50の通信部50bと共に、コントローラ50とリアコントローラ52との間の有線通信を制御する。
スイッチボックス53は、操作者の入力に応じて制御指令を生成し、その制御指令をコントローラ50に対して出力する。本実施形態では、スイッチボックス53は、リアコントローラ52と同様にスイッチ53a、モニタ53b及び通信部53cを有し、右後側スクリード31Rの右端、及び、左後側スクリード31Lの左端に取り付けられている。
操作者は、スイッチ53a等を操作することで、コンベアCVのオン・オフ、スクリュSCのオン・オフ、コンベアCVの搬送速度の調整、スクリュSCの回転速度の調整、バイブレータ駆動用油圧モータの回転速度の調整、スクリード温度の調整等を行うことができる。
モニタ53bは、例えば、コンベアCVの搬送速度、スクリュSCの回転速度、バイブレータ駆動用油圧モータの回転速度、スクリード温度等を表示できる。
通信部53cは、スイッチボックス53とコントローラ50との無線通信を制御する。但し、スイッチボックス53は通信ケーブルを介してコントローラ50又はリアコントローラ52に接続されていてもよい。この場合、通信部53cは、コントローラ50の通信部50b又はリアコントローラ52の通信部52cと共に、スイッチボックス53とコントローラ50又はリアコントローラ52との間の有線通信を制御する。
舗装厚制御装置54は、レベリングシリンダを伸縮させる制御指令を出力することで、アスファルトフィニッシャ100によって敷設される舗装材の厚みを制御する。舗装厚制御装置54は、例えば、センサ54a及び通信部54bを含む。センサ54aは、例えば、後側スクリード31の前端に取り付けられ、後側スクリード31の前方にある路盤RB(図1及び図2参照。)までの鉛直距離を測定する超音波センサである。
通信部54bは、舗装厚制御装置54とコントローラ50との無線通信を制御する。但し、舗装厚制御装置54は通信ケーブルを介してコントローラ50、リアコントローラ52又はスイッチボックス53に接続されていてもよい。この場合、通信部54bは、コントローラ50の通信部50b、リアコントローラ52の通信部52c、又は、スイッチボックス53の通信部53cと共に、舗装厚制御装置54とコントローラ50、リアコントローラ52、又はスイッチボックス53との間の有線通信を制御する。
舗装厚制御装置54は、例えば、センサ54aが検出した鉛直距離に基づいてレベリングシリンダの伸縮量に関する制御指令を生成し、その制御指令をコントローラ50に対して出力する。コントローラ50は、その制御指令に応じて油圧ポンプとレベリングシリンダとを繋ぐ管路に配置された制御弁を動作させてレベリングシリンダを伸縮させる。レベリングシリンダは、レベリングアーム3Aの前端部分を上下動させてスクリード3の位置及び姿勢を調整することで舗装材の敷き均し厚さを調整する。センサ54aが検出した鉛直距離又はそれに関連する情報は、例えば、スイッチボックス53のモニタ53bに表示されてもよい。
操作盤51、リアコントローラ52、スイッチボックス53及び舗装厚制御装置54のそれぞれは、アスファルトフィニッシャ100に対して着脱可能に構成されていてもよい。この場合、操作盤51は、例えば、トラクタ1から取り外されている場合には内蔵バッテリから電力の供給を受けてリモコンとして機能する。すなわち、操作者は、アスファルトフィニッシャ100から離れたところからアスファルトフィニッシャ100を遠隔操作できる。操作盤51は、トラクタ1に取り付けられている場合には電力供給装置60から電力の供給を受けて動作し、且つ、電力供給装置60の電力で内蔵バッテリを充電する。充電は、接触充電であってもよく非接触充電であってもよい。リアコントローラ52、スイッチボックス53、及び、舗装厚制御装置54についても同様である。また、操作盤51、リアコントローラ52、スイッチボックス53及び舗装厚制御装置54のそれぞれは、スマートフォン、タブレットPC、ノートPC等の携帯端末で構成されていてもよい。
連携システムCSは、抱え込み量制御装置を含んでいてもよい。抱え込み量制御装置は、後側スクリード31の前方における舗装材の抱え込み量を制御する。抱え込み量制御装置は、例えば、抱え込み量センサ及び通信部を含む。抱え込み量制御装置は、例えば、舗装厚制御装置54と同様に、内蔵式の電力供給装置から電力の供給を受ける。抱え込み量センサは、例えば、後側スクリード31のサイドプレートに取り付けられた超音波センサである。この場合、抱え込み量センサは、後側スクリード31の前方でスクリュSCが敷き拡げる舗装材までの距離を測定する。
通信部は、抱え込み量制御装置とコントローラ50との無線通信を制御する。但し、抱え込み量制御装置は通信ケーブルを介してコントローラ50、リアコントローラ52、スイッチボックス53又は舗装厚制御装置54に接続されていてもよい。この場合、通信部は、コントローラ50の通信部50b、リアコントローラ52の通信部52c、スイッチボックス53の通信部53c、又は、舗装厚制御装置54の通信部54bと共に、抱え込み量制御装置とコントローラ50、リアコントローラ52、スイッチボックス53又は舗装厚制御装置54との間の有線通信を制御する。
抱え込み量制御装置は、例えば、抱え込み量センサが検出した距離に基づいて抱え込み量が所定量より大きいか否かを判定する。そして、その判定結果に基づいてスクリュSCの回転速度に関する制御指令を生成し、その制御指令をコントローラ50に対して出力する。コントローラ50は、その制御指令に応じて油圧ポンプとスクリュ駆動用油圧モータとを繋ぐ管路に配置された制御弁を動作させてスクリュ駆動用油圧モータの回転速度を調整する。スクリュ駆動用油圧モータは、スクリュSCの回転速度を増減させて抱え込み量を増減させる。抱え込み量センサが検出した距離又はそれに関連する情報は、例えば、スイッチボックス53のモニタ53bに表示されてもよい。
上述のように、連携システムCSは、トラクタ1に搭載されている機器とスクリード3に搭載されている機器との間で無線通信が行われるように構成されている。また、トラクタ1に搭載されている機器が、トラクタ1に搭載されている電力供給装置60から電力の供給を受け、スクリード3に搭載されている機器が、スクリード3に搭載されている電力供給装置60Aから電力の供給を受けるように構成されている。そのため、トラクタ1からスクリード3に延びる電源ケーブル及び通信ケーブルが存在しない。従って、電源ケーブル及び通信ケーブルがトラクタ1とスクリード3との間で舗装材の熱等による損傷を受けるおそれはない。
また、連携システムCSは、トラクタ1に搭載されているコントローラ50とスクリード3に搭載されているスイッチボックス53との間で無線通信が行われるように構成されている。そのため、後側スクリード31の端部に取り付けられたスイッチボックス53に向かってスクリード3の中央部から延びる通信ケーブルが存在しない。従って、後側スクリード31が伸縮されたときに通信ケーブルが剥皮、断線等の損傷を受けるおそれはない。
上述の通り、連携システムCSは、スクリード3に搭載されている機器に関わるケーブルの損傷に関する問題を緩和或いは解消できる。そのため、トラクタ1に搭載されている機器とスクリード3に搭載されている機器とをより安定的に連携させることができる。その結果、アスファルトフィニッシャ100の利便性、安定性、作業性、生産性等を向上させることができる。
次に、図4を参照し、連携システムCSの別の構成例について説明する。図4は、連携システムCSの別の構成例を示すブロック図である。図4の連携システムCSは、リアコントローラ52及びスイッチボックス53がトラクタ1に搭載された電力供給装置60から電力の供給を受ける点で、図3の連携システムCSと異なる。また、リアコントローラ52とスイッチボックス53及び舗装厚制御装置54のそれぞれとの間で無線通信が行われる点、すなわち、コントローラ50とスイッチボックス53及び舗装厚制御装置54のそれぞれとの間で無線通信が行われない点で、図3の連携システムCSと異なる。但し、図4の連携システムCSは、その他の点で図3の連携システムCSと共通する。
この構成により、図4の連携システムCSは、図3の連携システムCSと同様に、トラクタ1に搭載されている機器とスクリード3に搭載されている機器とをより安定的に連携させることができる。また、図4の連携システムCSは、図3の連携システムCSに比べ、スクリード3に搭載されている機器に電力を安定的に供給できる。スクリード3に搭載されている機器が、トラクタ1に搭載された電力供給装置60から電力の供給を受けるためである。また、機器間を接続する通信ケーブルが省略されるため、通信ケーブルが損傷を受けるおそれを排除できる。なお、図4の連携システムCSでは、電力線搬送通信が利用されてもよい。
次に、図5を参照し、連携システムCSの更に別の構成例について説明する。図5は、連携システムCSの更に別の構成例を示すブロック図である。図5の連携システムCSは、リアコントローラ52とスイッチボックス53及び舗装厚制御装置54のそれぞれとの間で無線通信が行われるように構成されている点で図3の連携システムCSと異なる。すなわち、コントローラ50とスイッチボックス53及び舗装厚制御装置54のそれぞれとの間で無線通信が行われないように構成されている点で図3の連携システムCSと異なる。但し、図5の連携システムCSは、その他の点で図3の連携システムCSと共通する。
図5の連携システムCSでは、スイッチボックス53と舗装厚制御装置54との間で無線通信が行われ、舗装厚制御装置54とコントローラ50及びリアコントローラ52のそれぞれとの間では無線通信が行われないように構成されてもよい。
この構成により、図5の連携システムCSは、図3の連携システムCSと同様に、トラクタ1に搭載されている機器とスクリード3に搭載されている機器とをより安定的に連携させることができる。また、図5の連携システムCSは、図3の連携システムCSに比べ、スイッチボックス53及び舗装厚制御装置54に関する無線通信を低電力で実現できる。比較的短い距離で無線通信が行われるように構成されているためである。
上述のように、本発明の実施形態に係るアスファルトフィニッシャ100は、トラクタ1と、スクリード3と、トラクタ1及びスクリード3の少なくとも一方に搭載される複数の機器のうちの少なくとも2つの間の無線通信を可能にする無線通信システムとしての連携システムCSとを備える。そのため、トラクタ1に搭載されている機器とスクリード3に搭載されている機器とをより安定的に連携させることができる。
トラクタ1に搭載される機器は、例えば、コントローラ50及び操作盤51のうちの少なくとも1つを含み、スクリード3に搭載される機器は、リアコントローラ52、スイッチボックス53、センサ54a、スクリードコントローラ、及び、電力供給装置60Aのうちの少なくとも1つを含む。センサ54aは、段差センサであってもよい。スクリードコントローラは、操作者がスクリード3に関する各種設定を行うことができるようにスクリード3に取り付けられる装置であり、例えば、スイッチボックス53と同様の構成を有する。電力供給装置60Aは、例えば、振動発電機である。
連携システムCSは、図3~図5に示すように、コントローラ50とリアコントローラ52との間で無線通信が行われるように構成されてもよく、コントローラ50と操作盤51との間で無線通信が行われるように構成されてもよい。連携システムCSは、スイッチボックス53、センサ54a、及び、スクリードコントローラのうちの少なくとも1つとリアコントローラ52との間で無線通信が行われるように構成されてもよい。
連携システムCSは、コントローラ50とリアコントローラ52との間で有線通信が行われ、且つ、コントローラ50と操作盤51との間で無線通信が行われるように構成されてもよい。連携システムCSは、コントローラ50とリアコントローラ52との間で有線通信が行われ、且つ、スイッチボックス53、センサ54a、及び、スクリードコントローラのうちの少なくとも1つとリアコントローラ52との間で無線通信が行われるように構成されてもよい。
アスファルトフィニッシャ100は、例えば、トラクタ1に搭載された第1電力供給装置としての電力供給装置60と、電力供給装置60から独立した第2電力供給装置としての電力供給装置60Aとを備えていてもよい。そして、トラクタ1及びスクリード3の少なくとも一方に搭載される複数の機器のうちの少なくとも1つは、電力供給装置60Aから電力の供給を受けるように構成されてもよい。
また、本実施形態では、左後側スクリード31Lと右後側スクリード31Rは、進行方向(X軸方向)に互いにオフセットされて配置されている。そのため、車幅方向へより長く伸張できる。しかしながら、後側スクリード31が伸張されたときにはスイッチボックス53はトラクタ1から遠く離れた位置に配置される。そのため、スイッチボックス53が有線通信を行う場合、アスファルトフィニッシャは、スイッチボックス53に関する長いケーブルを備えている必要がある。一方で、後側スクリード31が収縮されたときには、アスファルトフィニッシャは、スイッチボックス53に関する長いケーブルの余分な部分を収納するスペースを備えている必要がある。本実施形態では、アスファルトフィニッシャ100は、スイッチボックス53が無線通信を行うことで、有線通信を行う場合に必要なケーブルを収納するためのスペースを省略することができる。
以上、本発明の好ましい実施形態が説明された。しかしながら、本発明は、上述した実施形態に限定されることはない。上述した実施形態は、本発明の範囲を逸脱することなしに、種々の変形、置換等が適用され得る。また、上述の実施形態を参照して説明された特徴のそれぞれは、技術的に矛盾しない限り、適宜に組み合わされてもよい。
本願は、2017年8月1日に出願した日本国特許出願2017-149062号に基づく優先権を主張するものであり、この日本国特許出願の全内容を本願に参照により援用する。
1・・・トラクタ 1S・・・運転席 2・・・ホッパ 3・・・スクリード 3A・・・レベリングアーム 5・・・後輪 6・・・前輪 11・・・エンジン 12・・・発電機 30・・・前側スクリード 31・・・後側スクリード 31L・・・左後側スクリード 31R・・・右後側スクリード 50・・・コントローラ 50a・・・制御部 50b・・・通信部 51・・・操作盤 51a・・・スイッチ 51b・・・モニタ 51c・・・通信部 52・・・リアコントローラ 52a・・・スイッチ 52b・・・モニタ 52c・・・通信部 53・・・スイッチボックス 53a・・・スイッチ 53b・・・モニタ 53c・・・通信部 54・・・舗装厚制御装置 54a・・・センサ 54b・・・通信部 60、60A、60B・・・電力供給装置 100・・・アスファルトフィニッシャ CV・・・コンベア NP・・・新設舗装体 PV・・・舗装材 RB・・・路盤 SC・・・スクリュ
Claims (9)
- トラクタと、
スクリードと、
前記トラクタ及び前記スクリードの少なくとも一方に搭載される複数の機器のうちの少なくとも2つの間で無線通信が行われるように構成される無線通信システムと、を備える、
アスファルトフィニッシャ。 - 前記トラクタに搭載される機器は、コントローラ及び操作盤のうちの少なくとも1つを含み、
前記スクリードに搭載される機器は、リアコントローラ、スイッチボックス、センサ、スクリードコントローラ、及び、振動発電機のうちの少なくとも1つを含む、
請求項1に記載のアスファルトフィニッシャ。 - 前記無線通信システムは、前記コントローラと前記リアコントローラとの間で無線通信が行われるように構成されている、
請求項2に記載のアスファルトフィニッシャ。 - 前記無線通信システムは、前記コントローラと前記操作盤との間で無線通信が行われるように構成されている、
請求項2に記載のアスファルトフィニッシャ。 - 前記無線通信システムは、前記スイッチボックス、前記センサ、及び、前記スクリードコントローラのうちの少なくとも1つと前記リアコントローラとの間で無線通信が行われるように構成されている、
請求項2に記載のアスファルトフィニッシャ。 - 前記無線通信システムは、前記コントローラと前記リアコントローラとの間で有線通信が行われ、且つ、前記コントローラと前記操作盤との間で無線通信が行われるように構成されている、
請求項2に記載のアスファルトフィニッシャ。 - 前記無線通信システムは、前記コントローラと前記リアコントローラとの間で有線通信が行われ、且つ、前記スイッチボックス、前記センサ、及び、前記スクリードコントローラのうちの少なくとも1つと前記リアコントローラとの間で無線通信が行われるように構成されている、
請求項2に記載のアスファルトフィニッシャ。 - 前記トラクタに搭載された第1電力供給装置と、
前記第1電力供給装置から独立した第2電力供給装置と、を備え、
前記トラクタ及び前記スクリードの少なくとも一方に搭載される複数の機器のうちの少なくとも1つは、前記第2電力供給装置から電力の供給を受ける、
請求項1に記載のアスファルトフィニッシャ。 - 前記スクリードは、車幅方向に伸縮可能な左後側スクリードと右後側スクリードを含み、
前記左後側スクリードと前記右後側スクリードとは進行方向に互いにオフセットされて配置されている、
請求項1に記載のアスファルトフィニッシャ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019534491A JPWO2019026830A1 (ja) | 2017-08-01 | 2018-07-30 | アスファルトフィニッシャ |
| CN201880052504.4A CN111344458A (zh) | 2017-08-01 | 2018-07-30 | 沥青滚平机 |
| EP18840475.0A EP3663465A4 (en) | 2017-08-01 | 2018-07-30 | ASPHALT FINISHING DEVICE |
| JP2022206003A JP7462019B2 (ja) | 2017-08-01 | 2022-12-22 | アスファルトフィニッシャ |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-149062 | 2017-08-01 | ||
| JP2017149062 | 2017-08-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019026830A1 true WO2019026830A1 (ja) | 2019-02-07 |
Family
ID=65233841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/028413 WO2019026830A1 (ja) | 2017-08-01 | 2018-07-30 | アスファルトフィニッシャ |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3663465A4 (ja) |
| JP (2) | JPWO2019026830A1 (ja) |
| CN (1) | CN111344458A (ja) |
| WO (1) | WO2019026830A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020203489A1 (ja) * | 2019-03-29 | 2020-10-08 | ||
| EP3736378A1 (de) * | 2019-05-08 | 2020-11-11 | Joseph Vögele AG | Einbaubohle mit schnellkupplung für aussenbedienstand |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0953253A (ja) * | 1995-08-14 | 1997-02-25 | Hitachi Constr Mach Co Ltd | 建設機械の領域制限掘削制御の掘削領域設定装置 |
| JP2011006858A (ja) * | 2009-06-23 | 2011-01-13 | Caterpillar Japan Ltd | 遠隔制御の室内用操作ユニット |
| JP2013253468A (ja) * | 2012-06-05 | 2013-12-19 | Joseph Voegele Ag | 路面仕上げ機及び路面仕上げ機による混合材の敷設方法 |
| JP2014047568A (ja) | 2012-08-31 | 2014-03-17 | Sumitomo (Shi) Construction Machinery Co Ltd | 舗装機械の運転者支援装置 |
| JP2016079570A (ja) | 2014-10-10 | 2016-05-16 | 住友建機株式会社 | 道路機械 |
| JP2016180300A (ja) * | 2015-03-13 | 2016-10-13 | ヨゼフ フェゲーレ アーゲー | 建設機械用操作装置 |
| JP2016191299A (ja) * | 2015-03-30 | 2016-11-10 | ヨゼフ フェゲーレ アーゲー | データ伝送用のネットワークを備える建設機械 |
| JP2017149062A (ja) | 2016-02-26 | 2017-08-31 | ブラザー工業株式会社 | 印刷装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5783022U (ja) * | 1980-11-10 | 1982-05-22 | ||
| JP3137000B2 (ja) | 1996-07-05 | 2001-02-19 | 松下電器産業株式会社 | 起電式スイッチ装置とこれを備えた電子機器 |
| EP1845196A1 (de) * | 2006-04-10 | 2007-10-17 | Joseph Vögele AG | Strassenfertiger |
| US8142103B2 (en) * | 2009-02-20 | 2012-03-27 | Caterpillar Trimble Control Technologies Llc | Wireless sensor with kinetic energy power arrangement |
| US8297875B1 (en) * | 2011-06-21 | 2012-10-30 | Caterpillar Paving Products Inc. | Screed heating control |
| US8469630B2 (en) * | 2011-11-10 | 2013-06-25 | Sauer-Danfoss Inc. | Sensor system for construction equipment having wireless sonic sensor system |
| US20130136539A1 (en) * | 2011-11-30 | 2013-05-30 | James Alvin Aardema | Paving system utilizing embedded measuring devices |
| US8825312B2 (en) * | 2012-03-21 | 2014-09-02 | Caterpillar Paving Products Inc. | System and method for paver screed endgate control |
| US9200415B2 (en) * | 2013-11-19 | 2015-12-01 | Caterpillar Paving Products Inc. | Paving machine with automatically adjustable screed assembly |
| JP2017089325A (ja) * | 2015-11-16 | 2017-05-25 | 住友建機株式会社 | アスファルトフィニッシャ |
| JP3205723U (ja) | 2016-05-30 | 2016-08-12 | 幅 朗 | 建設機械用アタッチメントおよび建設機械用アタッチメントシステム |
| CN105926418A (zh) * | 2016-06-17 | 2016-09-07 | 湖南中路华程桥梁科技股份有限公司 | 薄层活性粉末混凝土摊铺机智能控制方法及专用控制系统 |
-
2018
- 2018-07-30 CN CN201880052504.4A patent/CN111344458A/zh active Pending
- 2018-07-30 JP JP2019534491A patent/JPWO2019026830A1/ja active Pending
- 2018-07-30 WO PCT/JP2018/028413 patent/WO2019026830A1/ja unknown
- 2018-07-30 EP EP18840475.0A patent/EP3663465A4/en not_active Withdrawn
-
2022
- 2022-12-22 JP JP2022206003A patent/JP7462019B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0953253A (ja) * | 1995-08-14 | 1997-02-25 | Hitachi Constr Mach Co Ltd | 建設機械の領域制限掘削制御の掘削領域設定装置 |
| JP2011006858A (ja) * | 2009-06-23 | 2011-01-13 | Caterpillar Japan Ltd | 遠隔制御の室内用操作ユニット |
| JP2013253468A (ja) * | 2012-06-05 | 2013-12-19 | Joseph Voegele Ag | 路面仕上げ機及び路面仕上げ機による混合材の敷設方法 |
| JP2014047568A (ja) | 2012-08-31 | 2014-03-17 | Sumitomo (Shi) Construction Machinery Co Ltd | 舗装機械の運転者支援装置 |
| JP2016079570A (ja) | 2014-10-10 | 2016-05-16 | 住友建機株式会社 | 道路機械 |
| JP2016180300A (ja) * | 2015-03-13 | 2016-10-13 | ヨゼフ フェゲーレ アーゲー | 建設機械用操作装置 |
| JP2016191299A (ja) * | 2015-03-30 | 2016-11-10 | ヨゼフ フェゲーレ アーゲー | データ伝送用のネットワークを備える建設機械 |
| JP2017149062A (ja) | 2016-02-26 | 2017-08-31 | ブラザー工業株式会社 | 印刷装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020203489A1 (ja) * | 2019-03-29 | 2020-10-08 | ||
| WO2020203489A1 (ja) * | 2019-03-29 | 2020-10-08 | 住友建機株式会社 | アスファルトフィニッシャ |
| CN113597489A (zh) * | 2019-03-29 | 2021-11-02 | 住友建机株式会社 | 沥青滚平机 |
| JP7275254B2 (ja) | 2019-03-29 | 2023-05-17 | 住友建機株式会社 | アスファルトフィニッシャ |
| JP2023087053A (ja) * | 2019-03-29 | 2023-06-22 | 住友建機株式会社 | アスファルトフィニッシャ |
| EP3736378A1 (de) * | 2019-05-08 | 2020-11-11 | Joseph Vögele AG | Einbaubohle mit schnellkupplung für aussenbedienstand |
| JP2020183698A (ja) * | 2019-05-08 | 2020-11-12 | ヨゼフ フェゲーレ アーゲー | 外部制御ステーションのためのクイックカップリングを備えた舗装スクリード |
| JP6998989B2 (ja) | 2019-05-08 | 2022-01-18 | ヨゼフ フェゲーレ アーゲー | 外部制御ステーションのためのクイックカップリングを備えた舗装スクリード |
| US11447077B2 (en) | 2019-05-08 | 2022-09-20 | Joseph Voegele Ag | Paving screed with quick coupling for external control station |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023024677A (ja) | 2023-02-16 |
| JP7462019B2 (ja) | 2024-04-04 |
| EP3663465A4 (en) | 2020-08-12 |
| EP3663465A1 (en) | 2020-06-10 |
| CN111344458A (zh) | 2020-06-26 |
| JPWO2019026830A1 (ja) | 2020-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7462019B2 (ja) | アスファルトフィニッシャ | |
| US20140031954A1 (en) | Operating unit for a construction machine and method for operating the operating unit | |
| US8403594B2 (en) | Aggregate-spreading device | |
| CN110824931B (zh) | 用于控制自主施工车辆的系统和方法 | |
| CN105113373B (zh) | 旋转铺砖机 | |
| JP6668114B2 (ja) | アスファルトフィニッシャ | |
| US20140107882A1 (en) | Travel-restricted area setting system for unmanned traveling vehicle and computer program for setting travel-restricted area of unmanned traveling vehicle | |
| US20170260702A1 (en) | Paving machine | |
| CN106414856A (zh) | 用于运行机器的操作杆的无人驾驶系统 | |
| JP2008069516A (ja) | 電動式建設機械 | |
| US20150337504A1 (en) | Screed Vibration System | |
| JP2017089325A (ja) | アスファルトフィニッシャ | |
| JP2019157395A (ja) | 電動小型フィニッシャ | |
| JP7393524B2 (ja) | 作業システム | |
| CN101575839A (zh) | 新型牵引式摊铺机 | |
| WO2022210978A1 (ja) | アスファルトフィニッシャ、及び路面舗装システム | |
| JP6990491B2 (ja) | 電動小型ローラ | |
| JPH11269816A (ja) | 舗装材の敷き均し装置 | |
| JP2008169562A (ja) | 道路舗装車両のスクリード装置 | |
| CN101545239A (zh) | 新型摊铺机 | |
| JP5268788B2 (ja) | ホッパ装置 | |
| CN110863413B (zh) | 用于控制铺路机压实系统的操作的控制系统 | |
| JP2001172908A (ja) | アスファルト敷き均し機 | |
| CN207176466U (zh) | 用于冷铣刨机的转子组件及冷铣刨机 | |
| WO2023190952A1 (ja) | アスファルトフィニッシャ、及びアスファルトフィニッシャの給電システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18840475 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018840475 Country of ref document: EP Effective date: 20200302 |
|
| ENP | Entry into the national phase |
Ref document number: 2019534491 Country of ref document: JP Kind code of ref document: A |