WO2016002236A1 - 構造物の屋内監視システム及び方法 - Google Patents
構造物の屋内監視システム及び方法 Download PDFInfo
- Publication number
- WO2016002236A1 WO2016002236A1 PCT/JP2015/051360 JP2015051360W WO2016002236A1 WO 2016002236 A1 WO2016002236 A1 WO 2016002236A1 JP 2015051360 W JP2015051360 W JP 2015051360W WO 2016002236 A1 WO2016002236 A1 WO 2016002236A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- distance
- unit
- position information
- unmanned floating
- floating machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0038—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C23/00—Combined instruments indicating more than one navigational value, e.g. for aircraft; Combined measuring devices for measuring two or more variables of movement, e.g. distance, speed or acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0094—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots involving pointing a payload, e.g. camera, weapon, sensor, towards a fixed or moving target
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/14—Flying platforms with four distinct rotor axes, e.g. quadcopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/70—UAVs specially adapted for particular uses or applications for use inside enclosed spaces, e.g. in buildings or in vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
Definitions
- the present invention relates to an indoor monitoring system and method for a structure.
- boiler furnaces used in thermal power plants need to be opened at the time of production and periodically after the start of operation, and an operator needs to enter the inside for maintenance inspection.
- this maintenance inspection it is necessary to clarify the inspection location, but the boiler furnace has a large capacity and it is difficult to accurately grasp the inspection location visually. Therefore, conventionally, the worker's whereabouts or maintenance inspection position has been grasped by measuring and marking the height position and the left and right position of the inspection location with a tape measure or the like. Requires a lot of labor, cost, and inspection period.
- Patent Document 1 a technique for cleaning the inside of a structure such as a chimney with an unmanned inspection device.
- Patent Document 1 a technique for cleaning the inside of a structure such as a chimney with an unmanned inspection device.
- this proposal also requires a frame for installing the wire, and labor, cost, and inspection period are required for the preparation.
- Patent Document 2 For outdoor structures, it has been proposed to apply unmanned inspection technology that does not require scaffolding using a drone and GPS (Global Positioning System) (Patent Document 2).
- Patent Document 3 a system capable of indoor flight without using GPS has also been proposed.
- Patent Document 3 has a problem that a feature point (or pattern) is required on the ground instead of using GPS, and the place where the feature point (or pattern) can be installed is limited. Moreover, since structures such as boiler furnaces and chimneys are closed spaces in the dark, there is a problem that feature points cannot be confirmed.
- the present invention enables an uninhabited inspection in which internal position information is ensured, for example, an indoor monitoring system for a structure that can reduce labor, cost, and inspection period due to the absence of scaffolding construction, and It is an object to provide a method.
- the first invention of the present invention for solving the above-described problems is an unmanned floating machine equipped with a floating means for floating the inside of a structure by remote operation, and the unmanned floating machine mounted on the unmanned floating machine.
- a distance measuring unit that measures the distance between the machine and the inner wall surface of the structure, and an inertial measurement unit that is mounted on the unmanned floating machine, grasps a body posture of the unmanned floating machine, and is mounted on the unmanned floating machine, The current position of the unmanned floating machine according to the imaging unit for imaging the structure on the wall surface side of the structure, the operation unit for remotely operating the unmanned floating machine, the information of the distance measuring unit, and the information of the inertial measuring unit
- a flight position information acquisition unit that acquires information, a monitor unit that displays image information from the imaging unit, and position information from the flight position information acquisition unit, and in the flight position information acquisition unit,
- the unmanned floating by the distance measurement unit Obtained by the horizontal distance measurement step of measuring horizontal distance information between the inner wall surface of the structure and the posture angle
- An indoor monitoring system for a structure is characterized in that a distance acquisition step and a horizontal current position information acquisition step of acquiring horizontal current position information from known cross-sectional shape information of the structure are executed.
- the distance measurement unit measures distance information in the height direction of either the top or bottom of the unmanned floating aircraft and the structure.
- a distance measurement step a posture angle acquisition step for acquiring the posture angle of the unmanned floating machine, and a height for correcting the distance information in the height direction using the posture angle acquired in the posture angle acquisition step.
- An indoor monitoring of a structure comprising: performing a vertical distance correction step, and a height direction current position information acquisition step of acquiring current position information in a height direction from known vertical cross-sectional shape information of the structure In the system.
- a third invention is an indoor monitoring system for a structure according to the first invention, wherein a plurality of measurements are performed in the horizontal distance measurement step, and an average distance is used as the horizontal distance information.
- a fourth invention is the indoor monitoring system for a structure according to the second invention, wherein a plurality of measurements in the height direction distance measurement step are performed, and the averaged distance is used as distance information in the height direction. It is in.
- a fifth invention is the first or second invention, wherein the flight position information acquisition unit is mounted on an unmanned floating aircraft, the acquired current position information is transmitted to the ground side by the transmission unit, and is displayed on the monitor unit. It is in the indoor monitoring system of the structure characterized by.
- the flight position information acquisition unit is mounted on a controller terminal on the ground unit side, and the information on the distance measurement unit and the information on the inertia measurement unit are transmitted by the transmission unit to the ground unit.
- the current position information is displayed on the monitor unit after being transmitted to the side and processed in the flight position information acquisition unit.
- a seventh invention is an indoor surveillance system for a structure according to the first or second invention, wherein the imaging unit is one or both of a still image capturing unit and a moving image capturing unit.
- An eighth invention is an indoor surveillance system for a structure according to the first or second invention, wherein a guard portion is provided around the unmanned floating machine.
- the 9th invention uses the unmanned floating machine provided with the floating means which floats the inside of a structure in the air by remote control, and is mounted in the unmanned floating machine,
- the unmanned floating machine and the inner wall surface of the structure A distance measuring step for measuring a distance; an inertial measuring step mounted on the unmanned floating machine; for grasping a body posture of the unmanned floating machine; and a structure on the wall surface side of the structure mounted on the unmanned floating machine.
- a monitor display step for displaying image information from the imaging step and position information from the flight position information acquisition step, and in the flight position information acquisition step, the unmanned floater When A horizontal distance measurement step for measuring horizontal distance information with the inner wall surface of the structure, a posture angle acquisition step for acquiring a posture angle of the unmanned floating machine by the inertia measurement step, and a posture angle acquired by the posture angle acquisition step.
- a horizontal distance acquisition process that acquires the distance between at least two points on the front, rear, left, and right sides of the unmanned floating aircraft based on the yaw angle acquired in the inertial measurement process and a horizontal distance correction process that corrects the horizontal distance information using
- an indoor monitoring method for a structure which includes performing a process and a horizontal current position information acquisition step of acquiring horizontal current position information from known cross-sectional shape information of the structure.
- a height direction that measures distance information in a height direction of either the top or bottom of the unmanned floating aircraft and the structure by the distance measurement step A distance measurement step and a posture angle acquisition step for acquiring the posture angle of the unmanned floating machine by the inertia measurement step, and a height for correcting the distance information in the height direction using the posture angle acquired in the posture angle acquisition step.
- An indoor monitoring of a structure comprising: performing a vertical distance correction step, and a height direction current position information acquisition step of acquiring current position information in a height direction from known vertical cross-sectional shape information of the structure Is in the way.
- An eleventh aspect of the invention is an indoor monitoring method for a structure according to the ninth aspect of the invention, wherein a plurality of points are measured in the horizontal distance measuring step, and an average distance is used as the horizontal distance information.
- a twelfth aspect of the invention is the indoor monitoring method for a structure according to the tenth aspect of the invention, wherein a plurality of measurements in the height direction distance measurement step are performed, and the averaged distance is used as distance information in the height direction. It is in.
- a thirteenth invention is characterized in that, in the ninth or tenth invention, the flight position information acquisition step is processed on the unmanned floating aircraft side, and the acquired current position information is transmitted to the ground part side and displayed on a monitor. There is an indoor monitoring method for structures.
- the flight position information acquisition step is processed on the ground side, the distance measurement step information and the inertial measurement step information are transmitted to the ground side, An indoor monitoring method for a structure, which is processed in a flight position information acquisition step and displays current position information on a monitor.
- a fifteenth aspect of the invention is an indoor monitoring method for a structure according to the ninth or tenth aspect of the invention, wherein the imaging step is one or both of a still image imaging step and a moving image imaging step.
- the present invention for example, it is possible to perform an unmanned inspection in which position information inside a structure such as a boiler furnace or a chimney is ensured, for example, a significant reduction in labor, cost, and inspection period by eliminating the need for scaffolding. Can be achieved.
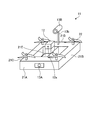
- FIG. 1 is a schematic diagram of an unmanned floating machine according to a first embodiment.
- FIG. 2 is a schematic diagram illustrating a state in which the boiler furnace according to the first embodiment is inspected.
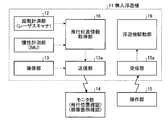
- FIG. 3 is a block configuration diagram of the indoor monitoring system for a structure according to the first embodiment.
- FIG. 4 is a block diagram of an indoor monitoring system for another structure according to the first embodiment.
- FIG. 5 is a diagram illustrating an example of a scan range when a laser scanner is used as the distance measurement unit according to the first embodiment.
- FIG. 6 is a diagram illustrating three modes of posture positions of the unmanned floating machine according to the first embodiment.
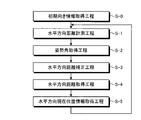
- FIG. 7 is a horizontal position monitoring flowchart according to the first embodiment.
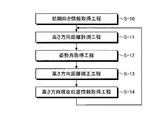
- FIG. 8 is a position monitoring flowchart in the height direction according to the first embodiment.
- FIG. 9 is a diagram illustrating an example of acquisition of the current position in the horizontal direction according to the first embodiment.
- FIG. 1 is a schematic diagram of an indoor monitoring system for a structure according to the first embodiment.
- FIG. 2 is a schematic diagram illustrating a state in which the boiler furnace according to the first embodiment is inspected.
- FIG. 3 is a block configuration diagram of the indoor monitoring system for a structure according to the first embodiment.
- the indoor monitoring system for a structure according to the present embodiment is a floating means that floats and moves the inside of a closed structure 50 such as a boiler furnace by remote control.
- the unmanned floating machine 11 provided with the propeller 22 and a distance measuring unit (for example, a laser scanner, an ultrasonic sensor, etc.) mounted on the unmanned floating machine 11 and measuring the distance between the unmanned floating machine 11 and the inner wall surface of the structure 50.
- a distance measuring unit for example, a laser scanner, an ultrasonic sensor, etc.
- IMU Inertial Measurement Unit
- IMU Inertial Measurement Unit
- Information (signals) and inertial measurement of an image pickup unit (still image pickup unit 13A, moving image pickup unit 13B) 13 an operation unit 15 for remotely operating the unmanned floating machine 11, and a distance measurement unit 12
- the flight position information acquisition unit 16 that acquires the current position information of the unmanned floater 11, the image information from the imaging unit 13, and the position information from the flight position information acquisition unit 16 are displayed.
- a monitor unit 14 is a laser beam emission part.
- a distance measurement step in which the distance measurement unit 12 measures horizontal distance information (r (t), ⁇ s ) between the unmanned floating aircraft 11 and the inner wall surface of the structure 50.
- the attitude angle acquisition step step S-2) of acquiring the attitude angle of the unmanned floating machine 11 by the inertial measurement unit, and the horizontal distance information using the attitude angle acquired in step 2
- the distance correction step step 3: S-3 for correcting (r (t), ⁇ s ) and the yaw angle acquired by the inertial measurement unit, at least two points (front and rear) (L f (t)) and left (L L (t)), front (L f (t)) and right (L R (t)), rear (L B (t)) and left (L L (t) ))
- a distance acquisition step step 4: S-4) for acquiring the distance between the rear (L B (t)) and the right (L R (t)), and the structure 50 is known
- a simple structure 50 such as a boiler furnace or a chimney is targeted. Since it is inside the structure 50, a distance measurement unit (for example, a laser scanner, an ultrasonic sensor, etc.) 12 that does not use GPS and an inertial measurement unit (Inertial Measurement Unit) that is a group of sensors used for controlling the attitude of the unmanned floating machine 11
- a distance measurement unit for example, a laser scanner, an ultrasonic sensor, etc.
- IMU inertial Measurement Unit
- the flight position and video of the unmanned floater 11 are displayed on the monitor unit 14 of the personal computer PC of the ground station installed outside the closed structure (boiler furnace) 50.
- the unmanned floating machine 11 is operated by the operation unit 15 while checking the damaged part), and the inner wall inspection of the closed space of the boiler furnace 50 is performed.
- the unmanned floating machine 11 is introduced from the entrance of the boiler furnace 50 shown in FIG. 2, and then the inside of the boiler furnace 50 is raised by a predetermined distance, and the operation part 15 on the ground side is operated along the inner surface of the four-direction wall. And turn. Then, it is raised again by a predetermined distance, and is similarly turned along the inner surface of the wall in the four directions. This operation is repeated until the top of the boiler furnace 50 is inspected and then lowered to finish the inspection.
- the degree of damage such as cracks in the piping on the inner surface is performed by the imaging unit.
- the monitor unit 14 can check the flight position and the damaged part, so that the position information inside can be checked by unmanned inspection. Is possible.
- the unmanned floating machine 11 is protected by a body guard part 21 (front guard part 21A, left guard part 21B, right guard part 21C, rear guard part 21D).
- Propeller 22 which is a floating means provided on the upper surface of the four corners of guard unit 21, distance measuring unit 12 mounted at the center of airframe body 21E, and still image capturing unit installed at a part of front guard unit 21A 13 ⁇ / b> A and a moving image capturing unit 13 ⁇ / b> B installed on the rear guard unit 21 ⁇ / b> D via the support unit 13 b. Since the distance measuring unit 12 scans a predetermined angle ( ⁇ 135 ° in this embodiment), it can be turned by a turning means (not shown).
- the imaging unit 13 for confirming the internal information may be either the still image capturing unit 13A or the moving image capturing unit 13B.
- FIG. 5 shows an example of the scanning range of the laser scanner.
- a scanner type range sensor “UTM-30LX (trade name)” manufactured by Hokuyo Electric Co., Ltd. was used.
- this scanner type range sensor is a two-dimensional scanning type optical distance sensor that measures the distance to a detection object while scanning with laser light, and the scan angle is ⁇ around 0 °. 135 °.
- a distance (r) is an actually measured distance from the laser scanner of the distance measuring unit 12 to the inner wall 50a, and ⁇ is an angle of the measured scan step.
- the scanning measurement step (s) in this apparatus is in increments of 0.25 °.
- FIG. 6 is a diagram illustrating three modes of posture positions of the unmanned floating machine according to the first embodiment.
- An inertial measurement unit is a device that detects three-axis angles (or angular velocities) and accelerations that control motion.
- the upper stage in FIG. 6 is a state of vertical rotation of the unmanned floating machine 11, and a turn (pitch (upward pitch)) that raises or lowers the front guard part 21 ⁇ / b> A (nose side) facing the inner wall 50 a side. ⁇ )).
- the middle stage shows the left-right rotation of the unmanned floating machine 11. The nose is shifted left and right, and the left guard part 21 ⁇ / b> B and the right guard part 21 ⁇ / b> C are swung left and right (yaw ( ⁇ )).
- the lower stage shows a state of rotation around the axis in the traveling direction of the unmanned floating machine 11, and is a turn (roll ( ⁇ )) that tilts the machine body to the left and right.
- the left and right sides of the aircraft are based on the direction of travel.
- the flight position information acquisition unit 16 calculates the true distance based on the actual distance information of the distance measurement unit 12 and the attitude angle information of the inertia measurement unit (IMU). This is because the unmanned floating aircraft 11 does not always fly according to the XY coordinates, and thus correction is necessary.
- FIG. 7 is a horizontal position monitoring flowchart according to the first embodiment.
- the measurement in the horizontal direction is performed by the first step (S-1) to the fifth step (S-5).
- an initial orientation information acquisition step (S-0) for acquiring initial orientation information when the unmanned floating machine 11 is installed in the bottom of the structure 50 is provided prior to this measurement.
- this step may be omitted.
- the first step is a horizontal distance measuring step (S-1) in which the distance measuring unit 12 measures horizontal distance information (r (t), ⁇ S ) between the unmanned floating machine 11 and the inner wall 50a of the structure 50. ).
- the second step is an attitude angle acquisition step (S-2) in which the inertial measurement unit (IMU) acquires the attitude angle of the unmanned floating machine 11.
- IMU inertial measurement unit
- the third step is a horizontal distance correction step (S-3) for correcting the horizontal distance information (r (t), ⁇ S ) using the posture angle acquired in the second step (S-2). .
- the fourth step is based on the yaw angle ( ⁇ ) acquired by the inertial measurement unit (IMU), and at least two points (front (L F (t )) And left (L L (t)), front (L F (t)) and right (L R (t)), rear (L B (t)) and left (L L (t)), rear ( This is a horizontal distance acquisition step (S-4) for acquiring the distance between L B (t)) and right (L R (t)).
- ⁇ yaw angle
- the fifth step is a horizontal direction current position information acquisition step (S-5) in which the current position information in the horizontal direction is acquired from the known cross-sectional shape information of the structure 50.
- the true distance information in the horizontal direction in consideration of the attitude angle at the time of measurement of the unmanned floating machine 11 can be acquired.
- the measurement distance is corrected with the acquired posture angle in the third step (S-3) as follows.
- the laser measurement point obtained by (r (t), ⁇ S ) is converted into (x R , y R ) coordinates. This coordinate transformation is obtained from the following equation (1).
- Equation (2) The value obtained from Equation (2) is converted into the (r, ⁇ ) coordinate system of laser measurement. This coordinate transformation is obtained from the following equation (3).
- the front-rear and left-right distances of the unmanned floating machine 11 are acquired based on the yaw angle ⁇ (t) acquired by the inertial measurement unit (IMU).
- the scan angle is out of the predetermined scan range, the distance from the wall side is not adopted.
- the data of the scan angle where the scan angle ⁇ 1 ⁇ (t) is the front distance L F (t) ⁇
- the current position (x (t), y ( t)) is obtained.
- the true current position can be acquired, and the imaging information and the position information captured at the current position can be confirmed on the monitor unit 14.
- FIG. 8 is a position monitoring flowchart in the height direction according to the first embodiment.
- the initial orientation information acquisition step (S-10) for acquiring the initial orientation information uses the information in the initial orientation information acquisition step (S-0) for acquiring the initial orientation information in the horizontal direction.
- the measurement in the height direction is performed by the following eleventh step (S-11) to fourteenth step (S-14).
- the eleventh step is a height direction distance measuring step in which the distance measuring unit 12 measures distance information (L D (t), ⁇ s ) on the lower side in the height direction of the unmanned floating machine 11 and the structure 50. (S-11).
- the measurement with the laser beam in the height direction is performed by a reflection optical system such as a mirror (not shown).
- the distance information (L U (t), ⁇ s ) on the upper side may be measured by reflecting the distance upward.
- the twelfth step is a posture angle acquisition step (S-12) in which the inertial measurement unit (IMU) acquires the posture angle of the unmanned floating machine 11.
- IMU inertial measurement unit
- the distance information (L D (t)) in the height direction is corrected using the posture angles ( ⁇ (t), ⁇ (t)) acquired in the twelfth step (S-12). This is a height direction distance correction step (S-13).
- the 14th step is a height direction current position information acquisition step (S-14) for acquiring the current position information in the height direction from the known longitudinal section shape information of the structure 50.
- the corrected measurement point (z ′ (t)) is obtained from the following equation (4).
- the horizontal direction and the height direction can be converted from the actual measurement distance to the true distance, and the position information can be acquired with certainty.
- FIG. 3 is a block diagram of the indoor monitoring system for structures according to the first embodiment.
- FIG. 4 is a block diagram of an indoor monitoring system for another structure according to the first embodiment.
- the position information processing is executed on the unmanned floating machine 11 side.
- the flight position information acquisition unit 16 is mounted at a predetermined location (not shown) on the unmanned floating aircraft 11 side, where the true current position information is acquired, and the acquired true current position information is displayed.
- the data is transmitted to the ground side by the transmission unit 13 a and displayed on the monitor unit 14.
- the unmanned floating machine 11 is operated by receiving a signal from the operation unit 15 by the receiving unit 15 a and issuing a flight command to the floating unit driving unit 19.
- the imaging information of the imaging unit 13 (still image imaging unit 13A, moving image imaging unit 13B) 13 is simultaneously transmitted on the ground side via the transmission unit 13a and displayed on the monitor unit 14. Yes.
- the position information processing is performed on the controller terminal side of the personal computer PC on the ground.
- the flight position information acquisition unit 16 is mounted on a controller terminal of a PC on the ground side (base station), and information (signal) of the distance measurement unit 12 and information (signal) of the inertia measurement unit (IMU) Is transmitted to the ground portion side by the transmitter 13a. And it is processed in the flight position information acquisition part 16 based on the received information, true current position information is acquired, and this acquired current position information is displayed on the monitor part 14.
- the imaging information captured by the imaging unit 13 is transmitted by the transmission unit 13a.
- the imaging information is temporarily transmitted to the unmanned floating machine 11 side. May be stored in the memory unit of the imaging unit, and information may be sent to the ground station after the observation is finished so that the imaging information matches the position information.
- the position information inside the structure 50 such as the boiler furnace and the chimney can be surely checked by an unmanned person, for example, labor due to the fact that no scaffolding is required, Cost and inspection period can be greatly reduced.
- the measurement by the distance measuring unit 12 is set as one point of information, but the present invention is not limited to this, and the accuracy of position measurement may be improved based on the measurement information of a plurality of points. Good.
- a plurality of points are extracted with the scan angle in the distance measuring unit 12 as the center, and the average is used as each distance. If more than half of the plurality of points become abnormal in distance measurement or become unmeasurable, they are not used for position monitoring. As a result, the influence of the distance acquisition error can be reduced.
- Unmanned floating machine 12
- Distance measuring unit laser scanner
- Imaging unit still image imaging unit 13A, moving image imaging unit 13B
- DESCRIPTION OF SYMBOLS 14
- Operation part 16
- Flight position information acquisition part 21
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Studio Devices (AREA)
- Closed-Circuit Television Systems (AREA)
- Length Measuring Devices By Optical Means (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201580034665.7A CN106662880B (zh) | 2014-07-02 | 2015-01-20 | 构造物的屋内监视系统以及方法 |
| EP15814504.5A EP3147743B1 (en) | 2014-07-02 | 2015-01-20 | Indoor monitoring system and method for structure |
| US15/322,230 US10359778B2 (en) | 2014-07-02 | 2015-01-20 | Indoor monitoring system and method for structure |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-136868 | 2014-07-02 | ||
| JP2014136868A JP6486024B2 (ja) | 2014-07-02 | 2014-07-02 | 構造物の屋内監視システム及び方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016002236A1 true WO2016002236A1 (ja) | 2016-01-07 |
Family
ID=55018806
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/051360 Ceased WO2016002236A1 (ja) | 2014-07-02 | 2015-01-20 | 構造物の屋内監視システム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10359778B2 (https=) |
| EP (1) | EP3147743B1 (https=) |
| JP (1) | JP6486024B2 (https=) |
| CN (1) | CN106662880B (https=) |
| TW (1) | TWI578132B (https=) |
| WO (1) | WO2016002236A1 (https=) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018158927A1 (ja) * | 2017-03-02 | 2018-09-07 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 3次元形状推定方法、飛行体、モバイルプラットフォーム、プログラム及び記録媒体 |
| US20220097845A1 (en) * | 2019-02-27 | 2022-03-31 | Mitsubishi Power, Ltd. | Unmanned aerial vehicle and inspection method |
| JP2022156984A (ja) * | 2021-03-31 | 2022-10-14 | 関西電力株式会社 | データ取得装置および該方法 |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017138049A1 (ja) * | 2016-02-10 | 2017-08-17 | パナソニックIpマネジメント株式会社 | 飛行体及びその制御システム |
| WO2017169516A1 (ja) * | 2016-03-28 | 2017-10-05 | 日本電気株式会社 | 無人飛行装置制御システム、無人飛行装置制御方法および検査装置 |
| JP6710114B2 (ja) * | 2016-06-21 | 2020-06-17 | 株式会社日立製作所 | 管路施設点検飛行体と、それを用いた管路施設点検システム |
| JP6697821B2 (ja) * | 2016-07-21 | 2020-05-27 | 三菱重工機械システム株式会社 | 画像処理装置および画像処理方法 |
| JP6746137B2 (ja) * | 2016-11-02 | 2020-08-26 | 株式会社プロドローン | 無人航空機 |
| CN106500611A (zh) * | 2016-11-25 | 2017-03-15 | 重庆科技学院 | 测距仪辅助装置 |
| JP2018116443A (ja) * | 2017-01-18 | 2018-07-26 | 住友重機械工業株式会社 | 検査システム |
| CN110392819B (zh) * | 2017-03-12 | 2022-02-01 | 株式会社尼罗沃克 | 用于测量农场水深的无人机 |
| JP6822267B2 (ja) * | 2017-03-28 | 2021-01-27 | 富士通株式会社 | 飛翔機及び飛翔機の使用方法 |
| JP6729879B2 (ja) * | 2017-04-06 | 2020-07-29 | 株式会社自律制御システム研究所 | 無人航空機、及びこれを用いる方法 |
| TWI662505B (zh) * | 2017-07-28 | 2019-06-11 | 中華大學 | 菌類生長影像監控系統 |
| CN109561275A (zh) * | 2017-09-27 | 2019-04-02 | 湖南航天远望科技有限公司 | 一种基于圆周扫描的区域监控方法及区域监控系统 |
| US20200364954A1 (en) * | 2017-09-28 | 2020-11-19 | Optim Corporation | Maintenance device control system, maintenance device control method, and program |
| JP7063578B2 (ja) * | 2017-11-09 | 2022-05-09 | 株式会社Soken | 飛行装置 |
| JP6475377B1 (ja) * | 2018-03-14 | 2019-02-27 | 株式会社サンメイ | 煙突の内部を検査する検査システム、および煙突の内部を検査する方法 |
| JP7033969B2 (ja) * | 2018-03-19 | 2022-03-11 | 三菱重工業株式会社 | 無人飛行体 |
| CN109031312B (zh) * | 2018-04-26 | 2023-08-22 | 中国计量大学 | 适用于烟囱内部作业的飞行平台定位装置和定位方法 |
| JP6505927B1 (ja) * | 2018-07-24 | 2019-04-24 | ミスギ工業株式会社 | 無人小型飛行体を用いた点検方法及びこれに用いる無人小型飛行体 |
| JP2020094780A (ja) * | 2018-12-14 | 2020-06-18 | 三菱重工機械システム株式会社 | 煙突筒身内面点検システム |
| WO2020139195A1 (en) * | 2018-12-27 | 2020-07-02 | Performance Rotors Pte. Ltd. | Drone for surface defects inspection |
| JP6733925B2 (ja) * | 2019-03-27 | 2020-08-05 | ミスギ工業株式会社 | 無人小型飛行体を用いた点検方法及びこれに用いる無人小型飛行体 |
| JP6737521B2 (ja) * | 2019-08-27 | 2020-08-12 | 株式会社センシンロボティクス | 高さ位置取得システム及び撮像システム、高さ位置取得方法、撮像方法 |
| JP6604681B1 (ja) | 2019-09-11 | 2019-11-13 | 株式会社Liberaware | 寸法表示システムおよび寸法表示方法 |
| JP6715542B1 (ja) * | 2019-10-28 | 2020-07-01 | 株式会社センシンロボティクス | 飛行体、点検方法及び点検システム |
| JP6777804B1 (ja) * | 2019-11-22 | 2020-10-28 | 三菱パワー株式会社 | ボイラ内部検査方法 |
| JP2021066420A (ja) * | 2020-06-02 | 2021-04-30 | 株式会社センシンロボティクス | 飛行体、点検方法及び点検システム |
| JP7612149B2 (ja) * | 2020-12-24 | 2025-01-14 | 株式会社Liberaware | 製鉄用加熱炉の検査方法 |
| CN112729312A (zh) * | 2020-12-25 | 2021-04-30 | 云南电网有限责任公司昆明供电局 | 一种变电站高压室无人机巡视方法 |
| CN113483616B (zh) * | 2021-07-06 | 2023-03-14 | 重庆市地质矿产勘查开发局208水文地质工程地质队(重庆市地质灾害防治工程勘查设计院) | 用于地表裂缝的便携式快速装拆精准监测仪 |
| JP7594753B2 (ja) * | 2023-05-17 | 2024-12-05 | 国立大学法人徳島大学 | 円筒構造体の点検システム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007213190A (ja) * | 2006-02-08 | 2007-08-23 | Advanced Telecommunication Research Institute International | コミュニケーションロボット改良システム |
| JP2009136987A (ja) * | 2007-12-10 | 2009-06-25 | Toyota Motor Corp | 移動ロボット、及び床面形状データの補正方法 |
| JP2009294713A (ja) * | 2008-06-02 | 2009-12-17 | Sanyo Electric Co Ltd | 点検システム、制御装置、点検方法及び制御プログラム |
| JP2010079869A (ja) * | 2008-08-25 | 2010-04-08 | Murata Machinery Ltd | 自律移動装置 |
| JP2012509812A (ja) * | 2008-11-27 | 2012-04-26 | パロット | 無人機を操縦する装置 |
| JP2012228944A (ja) * | 2011-04-26 | 2012-11-22 | Chiba Inst Of Technology | マルチロータヘリコプタの横風安定化装置及びこれを備えたマルチロータヘリコプタ |
| JP2013531573A (ja) * | 2010-05-26 | 2013-08-08 | エアロヴァイロンメント インコーポレイテッド | 再構成可能なバッテリ式の無人機システム |
| JP2014119828A (ja) * | 2012-12-13 | 2014-06-30 | Secom Co Ltd | 自律飛行ロボット |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3153832B2 (ja) | 1992-08-26 | 2001-04-09 | 三菱重工業株式会社 | 煙突の清掃装置 |
| JP2001209426A (ja) * | 2000-01-26 | 2001-08-03 | Nippon Telegr & Teleph Corp <Ntt> | 移動体制御装置 |
| JP2004211995A (ja) * | 2003-01-07 | 2004-07-29 | Mitsubishi Heavy Ind Ltd | 密閉空間内検査システム |
| CA2484422A1 (en) | 2004-10-08 | 2006-04-08 | Furgro Airborne Surveys | Unmanned airborne vehicle for geophysical surveying |
| EP1901153A1 (en) | 2006-09-12 | 2008-03-19 | OFFIS e.V. | Control system for unmanned 4-rotor-helicopter |
| JP2009093308A (ja) * | 2007-10-05 | 2009-04-30 | Hitachi Industrial Equipment Systems Co Ltd | ロボットシステム |
| JP5105596B2 (ja) * | 2007-10-30 | 2012-12-26 | 株式会社Ihi | 自律走行移動体の走行経路決定用地図作成装置及び走行経路決定用地図作成方法 |
| JP5349804B2 (ja) * | 2008-01-10 | 2013-11-20 | 株式会社日立産機システム | 移動ロボットシステム及びその制御方法 |
| US8060270B2 (en) | 2008-02-29 | 2011-11-15 | The Boeing Company | System and method for inspection of structures and objects by swarm of remote unmanned vehicles |
| US20140061376A1 (en) | 2010-05-26 | 2014-03-06 | Aerovironment Inc | Reconfigurable battery-operated vehicle system |
| CN102435188B (zh) * | 2011-09-15 | 2013-10-02 | 南京航空航天大学 | 一种用于室内环境的单目视觉/惯性全自主导航方法 |
| CN202600150U (zh) | 2012-05-17 | 2012-12-12 | 北京必威易激光科技有限公司 | 智能化低空遥感测绘系统 |
| CN103455036B (zh) | 2012-06-05 | 2018-04-27 | 国家电网公司 | 一种场景空中巡视方法和飞行器 |
| CN103144770B (zh) * | 2013-03-19 | 2015-10-28 | 南京航空航天大学 | 一种全自主控制入室环境避障导航微型飞行器 |
| CN103365295B (zh) | 2013-06-29 | 2015-09-30 | 天津大学 | 基于dsp的四旋翼无人飞行器自主悬停控制系统及方法 |
| CN203342367U (zh) | 2013-07-01 | 2013-12-18 | 昊翔电能运动科技(昆山)有限公司 | 多轴飞行器 |
| CN107203219B (zh) * | 2013-07-05 | 2020-10-23 | 深圳市大疆创新科技有限公司 | 无人飞行器的飞行辅助系统和方法 |
| CN103697889B (zh) | 2013-12-29 | 2016-05-25 | 北京航空航天大学 | 一种基于多模型分布式滤波的无人机自主导航与定位方法 |
| WO2015107623A1 (ja) * | 2014-01-15 | 2015-07-23 | パイオニア株式会社 | 管理システム及び位置特定方法 |
-
2014
- 2014-07-02 JP JP2014136868A patent/JP6486024B2/ja active Active
-
2015
- 2015-01-20 WO PCT/JP2015/051360 patent/WO2016002236A1/ja not_active Ceased
- 2015-01-20 CN CN201580034665.7A patent/CN106662880B/zh active Active
- 2015-01-20 US US15/322,230 patent/US10359778B2/en active Active
- 2015-01-20 EP EP15814504.5A patent/EP3147743B1/en active Active
- 2015-01-27 TW TW104102689A patent/TWI578132B/zh active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007213190A (ja) * | 2006-02-08 | 2007-08-23 | Advanced Telecommunication Research Institute International | コミュニケーションロボット改良システム |
| JP2009136987A (ja) * | 2007-12-10 | 2009-06-25 | Toyota Motor Corp | 移動ロボット、及び床面形状データの補正方法 |
| JP2009294713A (ja) * | 2008-06-02 | 2009-12-17 | Sanyo Electric Co Ltd | 点検システム、制御装置、点検方法及び制御プログラム |
| JP2010079869A (ja) * | 2008-08-25 | 2010-04-08 | Murata Machinery Ltd | 自律移動装置 |
| JP2012509812A (ja) * | 2008-11-27 | 2012-04-26 | パロット | 無人機を操縦する装置 |
| JP2013531573A (ja) * | 2010-05-26 | 2013-08-08 | エアロヴァイロンメント インコーポレイテッド | 再構成可能なバッテリ式の無人機システム |
| JP2012228944A (ja) * | 2011-04-26 | 2012-11-22 | Chiba Inst Of Technology | マルチロータヘリコプタの横風安定化装置及びこれを備えたマルチロータヘリコプタ |
| JP2014119828A (ja) * | 2012-12-13 | 2014-06-30 | Secom Co Ltd | 自律飛行ロボット |
Non-Patent Citations (3)
| Title |
|---|
| DILL, E.; ET AL.: "Seamless indoor-outdoor navigation for unmanned multi-sensor aerial platforms", POSITION, LOCATION AND NAVIGATION SYMPOSIUM - PLANS 2014, 5 May 2015 (2015-05-05), pages 1174 - 1182, XP032616416 * |
| See also references of EP3147743A4 * |
| SEUNGHO JEONG; ET AL.: "Vision-based localization of a quad-rotor system", UBIQUITOUS ROBOTS AND AMBIENT INTELLIGENCE (URAI), 2012 9TH INTERNATIONAL CONFERENCE ON, 26 November 2012 (2012-11-26), pages 636 - 638, XP032331135 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018158927A1 (ja) * | 2017-03-02 | 2018-09-07 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 3次元形状推定方法、飛行体、モバイルプラットフォーム、プログラム及び記録媒体 |
| US20220097845A1 (en) * | 2019-02-27 | 2022-03-31 | Mitsubishi Power, Ltd. | Unmanned aerial vehicle and inspection method |
| JP2022156984A (ja) * | 2021-03-31 | 2022-10-14 | 関西電力株式会社 | データ取得装置および該方法 |
| JP7602952B2 (ja) | 2021-03-31 | 2024-12-19 | 関西電力株式会社 | データ取得装置および該方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6486024B2 (ja) | 2019-03-20 |
| EP3147743A1 (en) | 2017-03-29 |
| JP2016015628A (ja) | 2016-01-28 |
| EP3147743A4 (en) | 2017-05-31 |
| TW201602748A (zh) | 2016-01-16 |
| US10359778B2 (en) | 2019-07-23 |
| CN106662880B (zh) | 2019-08-06 |
| CN106662880A (zh) | 2017-05-10 |
| TWI578132B (zh) | 2017-04-11 |
| US20170139410A1 (en) | 2017-05-18 |
| EP3147743B1 (en) | 2019-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6486024B2 (ja) | 構造物の屋内監視システム及び方法 | |
| JP7260269B2 (ja) | 航空非破壊検査用の測位システム | |
| US11048276B2 (en) | Measuring device, control device for unmanned aerial vehicle and computer program product for controlling unmanned aerial vehicle | |
| CN108303426B (zh) | 一种电缆隧道缺陷无损快速检测装置及其检测方法 | |
| JP2019078746A (ja) | ケーブル懸架式プラットフォームを用いた構造体を測定及び検査するための方法 | |
| JP6039050B1 (ja) | 無人機を用いた構造物等の検査方法 | |
| WO2017065102A1 (ja) | 飛行型検査装置および検査方法 | |
| CN112327898B (zh) | 无人机的井道巡检导航方法、装置和无人机 | |
| JP2017059955A (ja) | 撮像システム及びコンピュータプログラム | |
| JP2017201757A (ja) | 画像取得システム、画像取得方法、画像処理方法 | |
| JP6707933B2 (ja) | 無人飛行装置制御システム、無人飛行装置制御方法および無人飛行装置 | |
| JP6499542B2 (ja) | 構造物の点検方法 | |
| JP7026272B1 (ja) | 飛行体ユニットおよび点検システム | |
| US20230103063A1 (en) | Hammering test system | |
| KR102504743B1 (ko) | 시설물의 모델링을 기반으로 하는 점검 드론의 위치 보정장치 및 보정방법 | |
| JP2023070120A (ja) | 自律飛行制御方法、自律飛行制御装置および自律飛行制御システム | |
| KR102572904B1 (ko) | 무인 항공기 및 검사 방법 | |
| JP2025089391A (ja) | 飛行体、点検方法及び点検システム | |
| US20250150559A1 (en) | Moving wind turbine blade inspection | |
| JP7314466B2 (ja) | 無人航空機、画像撮像システム、及びプログラム | |
| JP6715542B1 (ja) | 飛行体、点検方法及び点検システム | |
| KR101956472B1 (ko) | 구조물 검사 장치 및 밸러스트 탱크 검사 시스템 | |
| JP7165800B2 (ja) | 撮影画像補正方法 | |
| KR101990202B1 (ko) | 구조물 검사 장치 및 밸러스트 탱크 검사 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15814504 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015814504 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015814504 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15322230 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |