WO2013102960A1 - 電気車制御装置及び電気車 - Google Patents
電気車制御装置及び電気車 Download PDFInfo
- Publication number
- WO2013102960A1 WO2013102960A1 PCT/JP2012/003954 JP2012003954W WO2013102960A1 WO 2013102960 A1 WO2013102960 A1 WO 2013102960A1 JP 2012003954 W JP2012003954 W JP 2012003954W WO 2013102960 A1 WO2013102960 A1 WO 2013102960A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- battery
- electric vehicle
- converter
- voltage
- control device
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/007—Physical arrangements or structures of drive train converters specially adapted for the propulsion motors of electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/02—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit
- B60L15/025—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit using field orientation; Vector control; Direct Torque Control [DTC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0046—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to electric energy storage systems, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/53—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells in combination with an external power supply, e.g. from overhead contact lines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/16—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to battery ageing, e.g. to the number of charging cycles or the state of health [SoH]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/24—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries
- B60L58/25—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries by controlling the electric load
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L9/00—Electric propulsion with power supply external to the vehicle
- B60L9/16—Electric propulsion with power supply external to the vehicle using ac induction motors
- B60L9/24—Electric propulsion with power supply external to the vehicle using ac induction motors fed from ac supply lines
- B60L9/28—Electric propulsion with power supply external to the vehicle using ac induction motors fed from ac supply lines polyphase motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/14—Boost converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/30—AC to DC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/40—DC to AC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/549—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/20—Inrush current reduction, i.e. avoiding high currents when connecting the battery
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present embodiment relates to an electric vehicle control device and an electric vehicle.
- An electric railway vehicle is driven using electric power supplied from an overhead line through a pantograph.
- an overhead line is installed on the premises line in the garage or the pit line for maintenance.
- a diesel-powered locomotive that does not require overhead power pushes the electric vehicle into the pit line.
- a diesel-powered locomotive is required every time an electric vehicle needs to be pushed into the pit line, resulting in poor work efficiency.
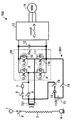
- FIG. 1 is a diagram illustrating a main circuit configuration of an electric vehicle control device for an electric vehicle according to a first embodiment.
- FIG. 2 is a diagram illustrating a step-up chopper to which a part of the configuration included in the AC / DC converter included in the electric vehicle control device according to the first embodiment is applied.
- FIG. 3 is a diagram showing a main circuit configuration for controlling the step-up chopper in the electric vehicle control apparatus according to the first embodiment.
- Figure 4 is a diagram showing an example of a switching signal Q Y produced in accordance with the relationship between the voltage command value and the triangular wave.
- Figure 5 is a diagram showing an example of discharge current I BATT increasing or decreasing in accordance with the on / off cycle of the switching signal Q Y.
- FIG. 1 is a diagram illustrating a main circuit configuration of an electric vehicle control device for an electric vehicle according to a first embodiment.
- FIG. 2 is a diagram illustrating a step-up chopper to which a part of the configuration included
- FIG. 6 is a diagram illustrating a configuration for controlling the VVVF inverter of the electric vehicle control apparatus according to the first embodiment.
- FIG. 7 is a diagram showing a main circuit configuration of the electric vehicle control device according to the second embodiment.
- FIG. 8 is a diagram illustrating a step-up chopper to which a part of the configuration included in the AC / DC converter included in the electric vehicle control device according to the second embodiment is applied.
- FIG. 9 is a diagram illustrating a main circuit configuration of the electric vehicle control device according to the third embodiment.
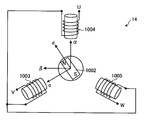
- FIG. 10 is a diagram illustrating an example of a driving main motor that is driven by electric power supplied from a VVVF inverter.
- FIG. 11 is a diagram showing the relationship between the D-axis current and the Q-axis current necessary for outputting the same torque, and the loss.
- the electric vehicle control device of one embodiment has a diode and a switching element that convert alternating current or direct current voltage supplied from the input side into direct current voltage, and a converter to which the main motor is connected to the output side via an inverter; A battery connected to the converter via a reactor and supplying power to the main motor; a diode included in the converter; and the switching element, and a boost chopper circuit for boosting the voltage of the battery.
- an electric vehicle control device that can be downsized while having a function of boosting a battery.
- FIG. 1 is a diagram illustrating a main circuit configuration of an electric vehicle control apparatus 100 for an electric vehicle according to the first embodiment.
- the electric vehicle control apparatus 100 is connected to a current collector (hereinafter referred to as a pantograph) 1 to an AC overhead line (not shown) and supplied with electric power.
- a current collector hereinafter referred to as a pantograph
- the pantograph 1 the AC high speed circuit breaker 2, and the transformer 3 are connected to the overhead line side.
- the negative side of the transformer 3 is grounded through the wheel 4.
- the transformer 3 transforms an AC voltage supplied from the AC overhead line via the pantograph 1 and supplies the transformed AC voltage to the AC / DC converter 20 side.
- the electric vehicle control device 100 includes a charging resistor charging contactor 5, a charging resistor short-circuiting contactor 6, a charging resistor 7, an AC / DC on the secondary side of the transformer 3. Converter 20. Further, the electric vehicle control device 100 includes a filter capacitor 12 and a VVVF inverter 13 on the DC side of the AC / DC converter 20. Furthermore, the electric vehicle control device 100 includes a drive main motor (MM) 14 on the AC side of the VVVF inverter 13. Further, the electric vehicle control device 100 includes a control power supply battery 15, a backflow prevention diode 16, a reactor 17, a plus side open contactor 18, and a minus side open contactor 19.
- Control power supply battery 15 (hereinafter also referred to as battery 15) is a battery that supplies power to various systems controlled by electric vehicle control device 100 or the like.
- the control power supply battery 15 according to the present embodiment is further used to supply power to the VVVF inverter 13 when the electric vehicle moves in a place without an overhead line.
- the control power supply battery 15 is normally fully charged because it is charged from a charger (not shown) when there is a power supply source such as an overhead wire or a third rail.
- the AC / DC converter 20 has two phases, a U phase and a V phase.
- the U phase includes a U phase upper element 8 and a U phase lower element 9.
- the V phase includes a V phase upper element 10 and a V phase lower element 11.
- diodes (10a, 11a) and switching elements (10b, 11b) such as IGBTs are connected in antiparallel. Configured.
- the configuration included in the V phase is used as the boost chopper circuit having the boosting function of the battery 15 will be described, but the configuration included in the U phase may be used.
- the electric vehicle control apparatus 100 when the electric vehicle travels in a place with an overhead line, the AC high-speed circuit breaker 2, the charging resistor charging contactor 5, and the charging resistor short-circuiting contactor 6 are connected. The plus side open contactor 18 and the minus side open contactor 19 are opened. Thereby, the electric power supplied from the transformer 3 is supplied to the AC / DC converter 20 via the charging resistor 7. The AC / DC converter 20 converts the AC voltage of the supplied power into a DC voltage. Then, power is supplied from the AC / DC converter 20 to the filter capacitor 12 and the VVVF inverter 13 arranged in parallel.
- the VVVF inverter 13 converts the DC voltage output from the AC / DC converter 20 into an AC voltage having a variable voltage and a variable frequency, and supplies the AC voltage to the driving main motor 14 that drives the electric vehicle. Thereby, the electric vehicle can drive
- the battery 15 needs to be driven by the battery 15.
- the electric vehicle control apparatus 100 is connected to the AC / DC converter 20 and the battery 15, and uses the semiconductor element necessary for boosting the boost chopper and the semiconductor element of the AC / DC converter in common.
- the converter and the step-up chopper are integrated. The contents will be described below.
- FIG. 2 is a diagram showing a step-up chopper to which a part of the configuration included in the AC / DC converter 20 included in the electric vehicle control device 100 is applied.
- the boost chopper circuit 201 is realized by the configuration on the path indicated by the thick line. That is, the boost chopper circuit 201 is included in the battery 15, the backflow prevention diode 16, the reactor 17, the switching element (for example, IGBT) 11 b included in the V-phase lower element 11, and the V-phase upper element 10. It comprises a diode 10a and a filter capacitor 12. As shown in FIG. 2, the switching element 10 b and the diode 10 a included in the V-phase upper element 10 are shared with the AC / DC converter 20.
- the reactor 17 used in the step-up chopper circuit 201 is determined by the battery discharge current and the switching frequency. For example, if the travel by the battery 15 is limited to about 3 km / h and the driving force is limited to about 1/5 of the maximum driving force, the power consumption is about 30 kw. If the voltage of the battery 15 is 110 V, the battery discharge current is 270 A, the switching frequency is 500 Hz, and the allowable current pulsation is ⁇ 50 A, that is, 100 A between the peaks, it may be about 1 mH. For this reason, in this embodiment, the reactor 17 having an inductance value of 1 mH and a rated current of 270 A may be selected. Therefore, the additional parts are not large parts that affect the overall size of the electric vehicle control device 100.
- the backflow prevention diode 16 is provided to suppress charging of the battery 15 due to backflow of current.
- the pantograph 1 When the electric vehicle according to the present embodiment moves in a place where there is no overhead line, the pantograph 1 is lowered by the operation of switching to battery running, and power is supplied from the control power supply battery 15 to the VVVF inverter 13. As such, the circuit is connected.
- the electric vehicle control device 100 opens the AC high-speed circuit breaker 2, the charging resistor charging contactor 5 and the charging resistor short-circuiting contactor 6, and opens the plus-side opening contactor 18 and the minus-side opening contactor 19. Connecting.
- the step-up chopper circuit 201 performs step-up according to the conduction rate of the switching element 11b.
- the electric vehicle control apparatus 100 can charge the filter capacitor 12 after the boost chopper circuit 201 boosts the voltage to 200V to 300V. . Since electric power is supplied to the VVVF inverter 13 with the boosted voltage, the driving main motor 14 can be driven. Thereby, the electric vehicle control device 100 can move the electric vehicle on which the electric vehicle control device 100 is mounted in a place where there is no overhead line.
- FIG. 3 is a diagram showing a main circuit configuration for controlling the step-up chopper circuit 201 in the electric vehicle control apparatus 100.
- the main circuit configuration shown in FIG. 3 includes a switch control unit 301 and operates by energization from the battery 15.
- the configuration shown in FIG. 3 is shown as an example of a control system for controlling the boost chopper circuit 201, and another control system may be used.
- the switch control unit 301 shown in FIG. 3 turns on / off the switching element 11b included in the V-phase lower element 11 so that the discharge current I BATT from the battery 15 flows. That is, when the switch control unit 301 turns on the switching element 11 b included in the V-phase lower element 11, the battery 15 is short-circuited via the reactor 17, so that the current increases. After that, when the switching element 11b is turned off, the switch controller 301 causes the current stored in the reactor 17 to flow into the filter capacitor 12 through the diode 10a side of the V-phase upper element 10. At this time, the discharge current I BATT gradually decreases. When the switch control unit 301 turns on the switching element 11b included in the V-phase lower element 11 again, the discharge current I BATT starts to increase.
- this operation is repeated, and the current from the battery 15 is charged to the filter capacitor 12.
- the switch control unit 301 appropriately changes the ON / OFF cycle of the switching element 11b of the V-phase lower element 11, in other words, the conduction ratio, thereby changing the voltage of the filter capacitor 12 to the battery 15. Can be higher than voltage.
- a filter capacitor voltage necessary for driving the driving main motor 14 is predetermined as a command value (also referred to as a filter capacitor voltage command value).
- a command value also referred to as a filter capacitor voltage command value.
- 300V is set as the filter capacitor voltage command value.
- the subtractor 311 inputs a differential voltage value obtained by subtracting the voltage measured from the filter capacitor 12 from the filter capacitor voltage command value to the proportional-plus-integral controller (PI) 312. Then, the proportional-plus-integral controller 312 calculates a command value (battery discharge current command value) that determines the discharge current flowing from the battery 15 from the input differential voltage value.
- PI proportional-plus-integral controller
- the subtractor 313 inputs a differential current value obtained by subtracting the actual battery discharge current value from the battery discharge current command value to the proportional-plus-integral controller (PI) 314.
- the proportional-plus-integral controller 314 calculates the conduction ratio of the switching element 11b of the step-up chopper circuit 201 (time ratio during which the switching element 11b is turned on) from the input differential current value.
- PWM signal generator 315 a technique such as comparing the duty ratio and the triangular wave, so that the predetermined switching frequency, and generates a switching signal Q Y of the switching element 11b.
- FIG. 4 is a diagram showing an example of a switching signal Q Y produced in accordance with the relationship between the voltage command value and the triangular wave.
- PWM signal generator 315 compares the duty ratio and the triangular wave, the time the duty ratio is larger than the triangular wave and outputs a switching signal Q Y as an on, the voltage command value or less of the triangular wave the time to output as an off-switching signal Q Y.
- the switching element 11b in accordance with the switching signal Q Y, ON / OFF periods are controlled.
- FIG. 5 is a diagram showing an example of discharge current I BATT increasing or decreasing in accordance with the on / off cycle of the switching signal Q Y. As shown in FIG. 5, in the time zone of the switching signal Q Y is turned on, the discharge current I BATT gradually increases, the switching signal Q Y is at off hours, the discharge current I BATT decreases gradually.
- the electric vehicle control device 100 has a configuration for controlling the inverter 13 in accordance with the voltage of the battery 15.
- FIG. 6 is a diagram showing a configuration for controlling the VVVF inverter 13 of the electric vehicle control apparatus 100.
- the electric vehicle control device 100 includes a battery SOC (State of Charge) detection mechanism 601 and a battery SOC determination unit 602.
- the battery SOC detection mechanism 601 detects the SOC (battery charge state) of the battery 15, and outputs the detection result to the battery SOC determination unit 602.
- Battery SOC determination unit 602 has a function of issuing a start command to VVVF inverter 13 based on the detection result. As described above, in the present embodiment, when the battery SOC determination unit 602 determines that the SOC of the battery 15 is equal to or greater than a predetermined value, the start command is issued to the VVVF inverter 13 to drive the driving main motor 14.
- This method makes it possible to make the voltage of the filter capacitor 12 higher than the voltage of the battery 15. Thereby, the VVVF inverter 13 can pressurize the driving main motor 14 with a voltage sufficient to drive the driving main motor 14.
- the battery SOC determination unit 602 determines that the SOC of the battery 15 is smaller than a predetermined value, the supply of power from the battery 15 is suppressed, so that overdischarge can be suppressed. Thereby, it can suppress that the battery 15 deteriorates.
- the diode 10a of the V-phase upper element 10 and the switching element 11b of the V-phase lower element 11 are chopper-operated to increase the voltage.
- the switching signal for controlling the switching element 11b is held in the OFF state without performing the chopper operation as in the present embodiment, the discharge current from the battery flows through the diode 10a of the V-phase upper element 10.
- the same voltage as that of the battery 15 is applied to the filter capacitor 12.
- the driving main motor 14 may be driven from the VVVF inverter 13 without boosting.
- the reactor 17 functions as a smoothing circuit for the discharge current from the battery 15. Thereby, the ripple (vibration component) of the discharge current from the battery 15 can be reduced, and the heat generation of the battery 15 can be suppressed and the battery life can be prevented from being shortened.
- the example in which the control power supply battery 15 is connected through the plus side open contactor 18 and the minus side open contactor 19 through the diode 16 has been described.
- the structure connected to a U phase may be sufficient.
- the battery 15 is boosted by using a part of the configuration of the AC / DC converter 20 configured in the main circuit for the AC overhead line as a boost chopper.
- the VVVF inverter 13 can pressurize the driving main motor 14 with a voltage sufficient for driving.
- the boosting function is ensured without providing a semiconductor element for the boosting chopper, so that the entire electric vehicle control device can be reduced in size.
- the electric vehicle control device of the present embodiment realizes a boost chopper using a part of the configuration of the converter, when driving the drive main motor with a battery, the voltage supplied to the drive main motor However, the booster chopper is not provided even though the booster is boosted.
- FIG. 7 is a diagram showing a main circuit configuration of the electric vehicle control device 700 according to the second embodiment.
- the same components as those in the first embodiment described above are denoted by the same reference numerals, and the description thereof is omitted.
- the electric vehicle control apparatus 700 shown in FIG. 7 is an example in which the reactor 17 is deleted and the secondary winding 701 of the transformer 3 is used in place of the reactor 17 as compared with the electric vehicle control apparatus 100 of the first embodiment.
- FIG. 8 is a diagram showing a step-up chopper to which a part of the configuration included in the AC / DC converter 20 included in the electric vehicle control device 700 is applied.
- the boost chopper 801 is realized by the configuration on the path indicated by the thick line. That is, the step-up chopper 801 includes the battery 15, the backflow prevention diode 16, the secondary winding 701 of the transformer 3, the switching element (for example, transistor) 11b included in the V-phase lower element 11, and the V-phase upper side.
- a diode 10a included in the element 10 and a filter capacitor 12 are included.
- the step-up chopper 801 shares the switching element 11 b and the diode 10 a included in the V-phase upper element 10 with the AC / DC converter 20, and the secondary winding of the transformer 3.
- the line 701 is used as a reactor.
- the inductance of the secondary winding of the transformer is about 1 mH to 2 mH.
- the secondary winding 701 of the transformer 3 can be used as a sufficient inductance as a reactor for the step-up chopper.
- the electric vehicle control device 700 shares a part of the elements included in the AC / DC converter 20 in the same manner as the first embodiment, and in addition to the secondary winding of the transformer 3.
- the line 701 is used as a reactor to boost the voltage of the battery 15 and pressurize the VVVF inverter 13 to drive the driving main motor 14. Note that control and the like for driving are the same as in the first embodiment, and a description thereof is omitted.
- the electric vehicle control device 700 can further reduce the number of parts by suppressing the provision of a new reactor. Thereby, an increase in cost can be suppressed.
- the electric vehicle control apparatus 700 can achieve smoothing of the discharge current as in the first embodiment by using the secondary winding 701 of the transformer 3 as a reactor.
- a part of the configuration of the AC / DC converter that converts the AC overhead wire voltage into the DC voltage in the electric vehicle of the AC overhead wire is used as a boost chopper.
- the electric vehicle control apparatus conventionally has a low battery voltage when the vehicle is driven by the control power supply battery, and therefore the battery voltage is directly driven by the VVVF inverter for driving.
- the voltage for driving the driving main motor is insufficient, so that the problem that sufficient speed and driving force cannot be obtained can be solved.
- the electric vehicle control device connects the reactor 17 or the secondary winding 701 of the transformer 3 to the output of the battery 15 to smooth the discharge current, so that the battery 15 Can prevent heat generation.
- the electric vehicle control device having such a configuration uses a semiconductor element and a reactor constituting the boost chopper together with a converter and a main transformer provided in the main circuit, It is possible to reduce the number of parts required for an electric vehicle control device having a boosting function, and thus it is possible to realize downsizing. Further, the cost can be reduced by reducing the number of parts. Furthermore, since it is not necessary to secure a space for installing the boost chopper, it is possible to give flexibility to the arrangement of other components.
- FIG. 9 is a diagram showing a main circuit configuration of an electric vehicle control apparatus 700 according to the third embodiment. Note that in the third embodiment, the same components as those in the first embodiment described above are denoted by the same reference numerals, and description thereof is omitted.
- the electric vehicle control apparatus 700 is configured such that a low-voltage battery 15 is connected via a reactor 17 between a U phase and a V phase of an AC / DC converter (single phase PWM converter) 20. Yes.
- a DC capacitor side of the AC / DC converter (single phase PWM converter) 20 is connected to a filter capacitor (smoothing capacitor) 12, a VVVF inverter 13, and a driving main motor 14 which is a main motor.
- a rotation detector 901 that detects the number of rotations of the driving main motor 14 is attached to the driving main motor 14.
- the control unit 900 performs control according to the rotation of the driving main motor 14 detected by the rotation detector 901.
- the controller 900 includes a PWM controller 911, a boost controller 912, a PWM controller 913, a damping controller 914, an adder 915, a current controller / vector controller 916, and a command calculation. And a container 917.
- the command calculator 917 of the control unit 900 receives the torque command calculated based on the command from the cab and the rotation speed of the driving main motor 14.
- the command calculator 917 calculates and outputs a D-axis current command, a Q-axis current command, and a boost voltage command based on the torque command and the rotation speed.
- the D-axis current and the Q-axis current will be described.
- FIG. 10 is a diagram showing an example of the driving main motor 14 driven by the power supplied from the VVVF inverter 13.
- the driving main electric motor 14 is configured by three phases of a V phase 1003, a U phase 1004, and a W phase 1005.
- the driving main motor 14 rotates the shaft 1002 with a rotating magnetic field generated by energizing the field coil of each phase.
- the three-phase (UVW) is converted into the orthogonal two-phase ⁇ -axis stationary coordinate system, and further converted into the DQ-axis rotational coordinate system to control the driving main motor 14. To do. Note that these coordinate system conversion methods are well-known techniques and will not be described.
- the command calculator 917 outputs a D-axis current command and a Q-axis current command based on the DQ-axis rotation coordinate system.
- the damping controller 914 pseudo-differentiates the voltage of the filter capacitor (smoothing capacitor) 12 detected by the voltage detector 918, and multiplies the gain to calculate the compensation amount for the Q-axis current command. Then, the adder 915 adds the compensation amount to the Q-axis current command output from the damping controller 914 to the Q-axis current command value output from the command calculator 917, and outputs the compensated Q-axis current command. Output.
- the current control / vector controller 916 receives the compensated Q-axis current command and D-axis current command. Then, the current controller / vector controller 916 outputs a three-phase voltage command to the PWM controller 911. Then, the PWM controller 911 controls the switching element built in the VVVF inverter 13 based on the input three-phase voltage command.
- the command calculator 917 outputs a boost voltage command to the boost controller 912.
- the boost controller 912 sends a current ratio command of the AC / DC converter (single-phase PWM converter) 20 to the PWM controller 913 by PI control or the like so that the voltage of the smoothing capacitor 12 matches the boost voltage command. Output.
- a boost chopper is realized by using a part of the configuration of the AC / DC converter 20.
- the PWM controller 913 switches the elements included in the U phase according to the input conduction rate command, and always turns on the lower elements included in the V phase.
- the boost voltage command is equal to the smoothing capacitor voltage.
- the step-up rate command is 100%, and the conduction rate command is 100%. Then, the PWM controller 913 always turns on the upper element included in the U phase and always turns on the lower element included in the V phase.
- boost voltage command has been described.
- a boost rate command may be used instead of the boost voltage command. Even when the boost rate is controlled using this boost rate command, the same effect as the boost voltage command can be obtained.
- the step-up rate represents the ratio of the DC voltage on the VVVF inverter 13 side of the AC / DC converter 20 to the DC voltage on the battery 15 side of the AC / DC converter (single phase PWM converter) 20. For example, when the step-up rate is 100%, the flow rate is 100% (the upper element included in the U phase is always on), and when the step-up rate is 200%, the flow rate is 50% (the upper and lower elements of the U phase) The element is switched at 50% duty).
- the damping controller 914 pseudo-differentiates the voltage of the smoothing capacitor 12 detected by the voltage detector 918, and multiplies the gain to calculate the compensation amount for the Q-axis current command.
- the Q-axis current increases, that is, increasing the torque to increase the current flowing from the smoothing capacitor 12 is equivalent to providing a resistor in parallel with the smoothing capacitor 12. It becomes a useful effect. Resonance can be suppressed by consuming energy due to the effect that the resistor is connected in parallel to the smoothing capacitor 12.
- the command calculator 917 determines the D-axis current command, the Q-axis current command, and the boost voltage command based on the torque command and the rotational speed so as to reduce the total loss including the motor loss and the power conversion loss. Therefore, the electric vehicle control device according to the present embodiment can suppress the life deterioration by reducing the heat generation of the low-voltage battery 15. In addition, since the high efficiency is improved, it is possible to travel a long distance within a limited battery capacity.
- FIG. 11 shows that the D-axis current and Q-axis current necessary for outputting the same torque and the motor operation are generated when the rotation speed and the DC voltage input to the VVVF inverter 13 are determined in advance. It is the figure which showed the relationship of the copper loss of the motor which is the heat_generation
- the command calculator 917 outputs a D-axis current command that reduces the D-axis current, as shown by the arrow in FIG.
- the modulation rate is lowered. Therefore, even when the direct current voltage decreases and the modulation rate exceeds 100%, the modulation rate can be shifted to a value lower than 100%. That is, it is possible to prevent the modulation rate from exceeding 100% with the change of the DC voltage.
- the command calculator 917 outputs a D-axis current command for decreasing the D-axis current. Thereby, it is possible to suppress the modulation rate within 100% while enabling high torque output.
- the command calculator 917 outputs a necessary torque in order to minimize the loss by the D-axis current command, and performs control so that the modulation rate does not exceed 100%.
- the control unit 900 performs various commands for the torque command in each rotation so that low-loss traveling can be performed within a range where the modulation rate does not exceed 100%. did.
- the modulation factor can theoretically be arbitrarily changed by the boost control of the boost chopper (in this embodiment, the single-phase PWM converter 20).
- the boost factor can be arbitrarily changed by the boost control of the boost chopper (in this embodiment, the single-phase PWM converter 20).
- the boost factor In addition to the increase in voltage and current, which are restricted by the protection voltage and protection current, boosting the voltage and current increases the loss of the single-phase PWM converter 20 and the VVVF inverter 13.
- the command calculator 917 determines the D-axis current command, the Q-axis current command, and the boost voltage command so that the total loss is minimized according to the torque command and rotation. This made it possible to suppress losses.
- the command calculator 917 when traveling with electric power supplied from the battery 15, a large torque and a large output are required while the vehicle is accelerating, but a required torque and output are reduced when a constant speed operation is started at a predetermined speed. . That is, while the vehicle is accelerating, the command calculator 917 outputs various commands so that the boosting operation is performed. In this case, a current value smaller than the current value at which the loss is minimized is set in the D-axis current command so that the output can be obtained although the loss is large.
- the command calculator 917 outputs various commands (conduction rate command 0) so that the boosting operation is not performed. In this case, a current value that minimizes the loss is set in the D-axis current command.
- the setting method of the D-axis current command and the Q-axis current command output from the command calculator 917 is a device that does not have a step-up chopper (here, the single-phase PWM converter 20) and cannot change the DC voltage arbitrarily. This also has the same effect and effect.
- the filter capacitor 12 of the step-up chopper circuit 201 is composed of one capacitor. However, two capacitors may be connected in series and ground between them.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Dc-Dc Converters (AREA)
- Rectifiers (AREA)
Abstract
バッテリを昇圧する機能を有しながら小型化を可能とする。 実施形態の電気車制御装置は、入力側から供給される交流または直流電圧を直流電圧に変換するダイオードとスイッチング素子を有し、出力側にインバータを介して主電動機が接続されるコンバータと、前記コンバータとリアクトルを介して接続され、前記主電動機の電源を供給するバッテリと、前記コンバータが有する前記ダイオードと前記スイッチング素子により構成され、前記バッテリの電圧を昇圧するための昇圧チョッパ回路と、を備える。
Description
本出願は、2012年1月5日に出願した先行する日本国特許出願第2012-000781号による優先権の利益に基礎をおき、かつ、その利益を求めており、その内容全体が引用によりここに包含される。
本実施形態は、電気車制御装置および電気車に関する。
電気鉄道車両は、架線からパンタグラフを通して供給される電力を使用して駆動される。ところで、海外の鉄道事業では、車庫内の構内線や、メンテナンスを行うピット線に架線が張られていないことも多い。この場合、車両を架線の張られていないピット線に移動する際、架線電力を必要としないディーゼル動力の機関車が、ピット線に電気車を押し込んでいる。この場合、ピット線に電気車を押し込む必要が生じるたびにディーゼル動力の機関車が必要となり、作業効率が悪いという問題点があった。
そこで、電気車に通常備えられている、制御電源用のバッテリを使用して低速で駆動用主電動機を駆動する手法が提案されている。しかしながら、制御電源用バッテリの電圧は、駆動用のVVVFインバータの直流側に通常加圧される主回路電圧と比べて低いため、所望の速度、すなわちモータ回転数を得るための電圧が不足する。
このような場合、制御電源用バッテリの電圧を、VVVFインバータに必要な電圧まで昇圧させるための構成として、昇圧チョッパを備える技術が提案されている。ここで、その技術に関して、下記文献を引用し、その内容全体を引用によりここに包含する。
特開2010-252524号公報
一実施形態の電気車制御装置は、入力側から供給される交流または直流電圧を直流電圧に変換するダイオードとスイッチング素子を有し、出力側にインバータを介して主電動機が接続されるコンバータと、前記コンバータとリアクトルを介して接続され、前記主電動機の電源を供給するバッテリと、前記コンバータが有する前記ダイオードと前記スイッチング素子により構成され、前記バッテリの電圧を昇圧するための昇圧チョッパ回路と、を備える。
上記一実施形態の構成によれば、バッテリを昇圧する機能を有しながら小型化を可能とする電気車制御装置を提供する。
(第1の実施形態)
図1は、第1の実施形態にかかる電気車の電気車制御装置100の主回路構成を示した図である。図1に示すように電気車制御装置100は、図示しない交流架線に集電装置(以下、パンタグラフ)1が接続され、電力が供給される。そして、電気車制御装置100は、パンタグラフ1と、交流高速度遮断器2と、トランス3とが架線側に接続される。そして、トランス3のマイナス側が車輪4を通して接地される。トランス3は、交流架線からパンタグラフ1を介して供給される交流電圧を変圧し、変圧した交流電圧を、AC/DCコンバータ20側に供給する。
図1は、第1の実施形態にかかる電気車の電気車制御装置100の主回路構成を示した図である。図1に示すように電気車制御装置100は、図示しない交流架線に集電装置(以下、パンタグラフ)1が接続され、電力が供給される。そして、電気車制御装置100は、パンタグラフ1と、交流高速度遮断器2と、トランス3とが架線側に接続される。そして、トランス3のマイナス側が車輪4を通して接地される。トランス3は、交流架線からパンタグラフ1を介して供給される交流電圧を変圧し、変圧した交流電圧を、AC/DCコンバータ20側に供給する。
図1に示すように、本実施形態にかかる電気車制御装置100は、トランス3の二次側に、充電抵抗投入用接触器5、充電抵抗短絡用接触器6、充電抵抗7、AC/DCコンバータ20と、を備えている。また、電気車制御装置100は、AC/DCコンバータ20の直流側に、フィルタコンデンサ12と、VVVFインバータ13と、を備えている。さらに、電気車制御装置100は、VVVFインバータ13の交流側に、駆動用主電動機(MM)14を備えている。さらに、電気車制御装置100は、制御電源用バッテリ15と、逆流防止用ダイオード16と、リアクトル17と、プラス側開放接触器18と、マイナス側開放接触器19と、を備えている。
制御電源用バッテリ15(以下、バッテリ15とも称す)は、電気車制御装置100等で制御を行う各種系統に対して電力を供給するバッテリとする。本実施形態にかかる制御電源用バッテリ15は、さらに、電気車が架線のない場所を移動する際に、VVVFインバータ13に電力を供給するために用いられる。制御電源用バッテリ15は、架線、第三軌条等の電力供給源があるときに、図示しない充電器から充電されているため、通常は満充電となる。
本実施形態にかかるAC/DCコンバータ20は、U相とV相の2相を有している。U相は、U相上側素子8と、U相下側素子9を含んでいる。V相は、V相上側素子10と、V相下側素子11を含んでいる。U相上側素子8、U相下側素子9、V相上側素子10、、V相下側素子11はそれぞれダイオード(10a、11a)とIGBT等のスイッチング素子(10b、11b)が逆並列に接続している構成される。本実施形態では、バッテリ15の昇圧機能を有する昇圧チョッパ回路として、V相に含まれている構成を使用する例について説明するが、U相に含まれている構成を使用しても良い。
本実施形態にかかる電気車制御装置100は、電気車が架線のある場所を走行する場合、交流高速度遮断器2、充電抵抗投入用接触器5、及び充電抵抗短絡用接触器6が接続され、プラス側開放接触器18、及びマイナス側開放接触器19が開放される。これにより、トランス3から供給される電力は、充電抵抗7を介して、AC/DCコンバータ20に供給される。そして、AC/DCコンバータ20は、供給された電力の交流電圧を直流電圧に変換する。そして、AC/DCコンバータ20から、並列に配置されたフィルタコンデンサ12及びVVVFインバータ13に電力が供給される。VVVFインバータ13は、AC/DCコンバータ20から出力された直流電圧を可変電圧可変周波数の交流電圧に変換し、当該交流電圧を、電気車を駆動させる駆動用主電動機14に供給する。これにより、電気車は、架線のある場所を走行することができる。しかしながら、海外の鉄道事業では、車庫内の構内線や、メンテナンスを行うピット線に架線が張られていないことも多い。このような状況でも電気車を走行させるためには、バッテリ15によるバッテリ駆動必要とする。
本実施形態にかかる電気車制御装置100は、AC/DCコンバータ20とバッテリ15と接続し、昇圧チョッパの昇圧に必要な半導体素子とAC/DCコンバータの半導体素子を共有して使用することで、コンバータと昇圧チョッパが一体化された構成となっている。以下、その内容について説明する。
図2は、電気車制御装置100が有しているAC/DCコンバータ20に含まれている構成の一部を適用した昇圧チョッパを示した図である。図2に示す例では、太線で示された経路上の構成により昇圧チョッパ回路201が実現されている。すなわち昇圧チョッパ回路201は、バッテリ15と、逆流防止用ダイオード16と、リアクトル17と、V相下側素子11に含まれているスイッチング素子(例えばIGBT等)11bと、V相上側素子10に含まれているダイオード10aと、フィルタコンデンサ12と、で構成されている。図2に示すように、スイッチング素子10bと、V相上側素子10に含まれているダイオード10aと、をAC/DCコンバータ20と共有している。
昇圧チョッパ回路201に用いられるリアクトル17は、バッテリ放電電流と、スイッチング周波数と、により決定される。例えば、バッテリ15による走行は3km/h程度に制限し、駆動力も最大駆動力の1/5程度に制限すると、消費電力は30kw程度となる。そして、バッテリ15の電圧を110Vとすると、バッテリ放電電流は270A、スイッチング周波数を500Hzとして、許容する電流の脈動を±50A、すなわちピーク間で100Aとすると、1mH程度あれば良い。このため、本実施形態では、インダクタンス値1mH、定格電流270Aのリアクトル17を選定すればよい。従って追加部品としては電気車制御装置100全体の大きさに影響するような大きな部品とはならない。
逆流防止用ダイオード16は、電流の逆流によるバッテリ15への充電を抑止するために設けられている。
本実施形態にかかる電気車が架線のない場所を移動する場合、操縦者が、バッテリ走行に切り替える操作を行うことで、パンタグラフ1が下がり、制御電源用バッテリ15からVVVFインバータ13に電力が供給されるように、回路が接続される。
本実施形態にかかる電気車が架線のない場所をバッテリ15の電力で走行する際、AC/DCコンバータ20の交流側を主回路的に切り離す。すなわち、電気車制御装置100は、交流高速度遮断器2、充電抵抗投入用接触器5及び充電抵抗短絡用接触器6を開放させ、プラス側開放接触器18、及びマイナス側開放接触器19を接続する。そして、昇圧チョッパ回路201は、スイッチング素子11bの通流率に従って昇圧が行われる。
これにより、本実施形態にかかる電気車制御装置100は、例えば、バッテリ15の電圧が110Vであっても、昇圧チョッパ回路201が電圧を200V~300Vに昇圧した上で、フィルタコンデンサ12を充電できる。昇圧された電圧でVVVFインバータ13に電力が供給されるため、駆動用主電動機14を駆動させることができる。これにより、電気車制御装置100は、当該電気車制御装置100が搭載された電気車を、架線がない場所で移動させることができる。
図3は、電気車制御装置100における、昇圧チョッパ回路201を制御する主回路構成を示した図である。図3に示す主回路構成は、スイッチ制御部301を備え、バッテリ15からの通電で動作する。なお、図3に示す構成は、昇圧チョッパ回路201を制御する制御系の例として示したものであり、他の制御系を用いても良い。
図3に示すスイッチ制御部301は、V相下側素子11に含まれているスイッチング素子11bをオン/オフすることで、バッテリ15からの放電電流IBATTが流れる。すなわち、スイッチ制御部301が、V相下側素子11に含まれているスイッチング素子11bをオンにすると、リアクトル17を介してバッテリ15が短絡されるため、電流が増加する。その後、スイッチ制御部301が、スイッチング素子11bがオフになると、リアクトル17に蓄えられたエネルギーにより、電流が、V相上側素子10のダイオード10a側を通して、フィルタコンデンサ12に流れ込む。このとき、放電電流IBATTは、徐々に減少する。再び、スイッチ制御部301が、V相下側素子11に含まれているスイッチング素子11bをオンすると、放電電流IBATTが増加に転じる。
本実施形態にかかる電気車制御装置100では、この動作を繰り返し、バッテリ15からの電流はフィルタコンデンサ12へ充電される。このように、スイッチ制御部301が、V相下側素子11のスイッチング素子11bのオン/オフ周期、換言すれば通流率を適切に変化させることで、フィルタコンデンサ12の電圧を、バッテリ15の電圧より高くできる。
次にスイッチ制御部301の構成について、図3を用いて説明する。本実施形態では、駆動用主電動機14を駆動するために必要なフィルタコンデンサ電圧が、指令値(フィルタコンデンサ電圧指令値とも称する)として予め定められている。例えば、フィルタコンデンサ12にかかる電圧を300Vにしたい場合、フィルタコンデンサ電圧指令値として300Vが設定されている。
そして、減算器311は、フィルタコンデンサ電圧指令値から、フィルタコンデンサ12から計測された電圧を減算した差分電圧値を、比例積分制御器(PI)312に入力する。そして、比例積分制御器312は、入力された差分電圧値から、バッテリ15から流れる放電電流を決める指令値(バッテリ放電電流指令値)を演算する。
そして、減算器313が、バッテリ放電電流指令値から、実際のバッテリの放電電流値を減算した差分電流値を、比例積分制御器(PI)314に入力する。比例積分制御器314は、入力された差分電流値から、昇圧チョッパ回路201のスイッチング素子11bの通流率(スイッチング素子11bをオンにしている時間比率)を演算する。
そして、PWM信号発生器315は、通流率と三角波とを比較する等の手法で、所定のスイッチング周波数となるように、スイッチング素子11bのスイッチング信号QYを生成する。
図4は、電圧指令値と三角波との関係に従って生成されるスイッチング信号QYの例を示した図である。図4に示すように、PWM信号発生器315は、通流率と三角波とを比較し、通流率が三角波より大きい時刻ではスイッチング信号QYをオンとして出力し、電圧指令値が三角波以下の時刻ではスイッチング信号QYをオフとして出力する。これにより、スイッチング素子11bは、スイッチング信号QYに従って、オン/オフ周期が制御される。
図5は、スイッチング信号QYのオン/オフ周期に従って増減する放電電流IBATTの例を示した図である。図5に示すように、スイッチング信号QYがオンの時間帯で、放電電流IBATTが徐々に増加し、スイッチング信号QYがオフの時間帯で、放電電流IBATTが徐々に減少する。
また、本実施形態にかかる電気車制御装置100は、バッテリ15の電圧に従ってインバータ13を制御する構成を備えている。図6は、電気車制御装置100のVVVFインバータ13を制御する構成を示した図である。図6に示すように、電気車制御装置100は、バッテリSOC(State of Charge:バッテリの充電状態)検出機構601と、バッテリSOC判定部602と、を備えている。
図6に示すように、バッテリSOC検出機構601が、バッテリ15のSOC(バッテリの充電状態)を検出し、検出結果をバッテリSOC判定部602に出力する。そして、バッテリSOC判定部602は、検出結果に基づいて、VVVFインバータ13へ起動指令を出す機能を有する。このように本実施形態では、バッテリSOC判定部602が、バッテリ15のSOCが予め定められた値以上と判定した場合に、VVVFインバータ13へ起動指令を出し、駆動用主電動機14を駆動させる。
当該手法により、フィルタコンデンサ12の電圧を、バッテリ15の電圧より高くすることが可能となる。これにより、VVVFインバータ13は、駆動用主電動機14を駆動するのに十分な電圧を駆動用主電動機14へ加圧することが可能となる。
また、バッテリSOC判定部602が、バッテリ15のSOCが予め定められた値より小さいと判定した場合に、バッテリ15からの電力の供給が抑止されるため、過放電を抑止できる。これによりバッテリ15が劣化するのを抑止できる。
ところで、図2に示す例では、V相上側素子10のダイオード10aとV相下側素子11のスイッチング素子11bとにチョッパ動作をさせて電圧を昇圧する構成で示した。しかしながら、本実施形態のようにチョッパ動作させないで、スイッチング素子11bを制御するスイッチング信号をオフ状態のまま保持しておくと、V相上側素子10のダイオード10aにバッテリからの放電電流が流れる。これにより、フィルタコンデンサ12にバッテリ15と同じ電圧が加圧される。このバッテリ15の電圧でも十分な駆動力が得られる場合、昇圧を行わずにVVVFインバータ13から、駆動用主電動機14を駆動させてもよい。このような場合でも、リアクトル17がバッテリ15からの放電電流の平滑回路として機能する。これにより、バッテリ15からの放電電流のリップル(振動成分)を低減し、バッテリ15の発熱を抑えバッテリの寿命を縮めてしまうことを防止できる。
本実施形態にかかる電気車制御装置100では、制御電源用のバッテリ15による駆動を行うためにAC/DCコンバータ20の一相、図1に示す例ではV相に対して、リアクトル17と逆流防止用ダイオード16とを通して、制御電源用バッテリ15が、プラス側開放接触器18とマイナス側開放接触器19を通して接続されている例について説明した。このように、本実施形態では、V相に制御電源用バッテリ15からの主回路線が接続された場合を示したが、U相へ接続する構成でもよい。なお、本実施形態にかかる電気車制御装置100では本実施形態では交流電圧を直流電圧に変換するコンバータを備えている例について説明したが、入力側から供給される直流電圧を直流電圧に変換するコンバータを備えている例であっても良い。
本実施形態にかかる電気車制御装置100では、交流架線用の主回路に構成されている、AC/DCコンバータ20の構成の一部を、昇圧チョッパとして用いて電圧を昇圧することで、バッテリ15の電圧より高い電圧でVVVFインバータ13を加圧することが可能となった。これにより、VVVFインバータ13は、駆動させるために十分な電圧で駆動用主電動機14を加圧することが可能となった。
つまり、本実施形態の電気車制御装置では、昇圧チョッパ用の半導体素子を設けることなく昇圧機能を確保したため、電気車制御装置全体の小型化を図ることが可能となる。
換言すると本実施形態の電気車制御装置は、コンバータの構成の一部を用いて昇圧チョッパを実現しているため、バッテリで駆動用主電動機を駆動させる際、駆動用主電動機に供給される電圧が昇圧されているにも拘わらず昇圧チョッパを備えていないことになる。
(第2の実施形態)
AC/DCコンバータの構成の一部を、昇圧チョッパとして用いる例は、第1の実施形態に制限するものではなく、他の態様を適用しても良い。そこで、第2の実施形態では、主回路構成が別形態の場合について説明する。
AC/DCコンバータの構成の一部を、昇圧チョッパとして用いる例は、第1の実施形態に制限するものではなく、他の態様を適用しても良い。そこで、第2の実施形態では、主回路構成が別形態の場合について説明する。
図7は、第2の実施形態にかかる電気車制御装置700の主回路構成を示した図である。なお、第2の実施形態では、上述した第1の実施の形態と同一の構成要素には同一の符号を付してその説明を省略する。
図7に示す電気車制御装置700は、第1の実施形態の電気車制御装置100と比べて、リアクトル17を削除し、当該リアクトル17の代わりにトランス3の2次巻線701を用いた例とする。
図8は、電気車制御装置700が有しているAC/DCコンバータ20に含まれている構成の一部を適用した昇圧チョッパを示した図である。図8に示す例では、太線で示された経路上の構成により昇圧チョッパ801が実現されている。すなわち昇圧チョッパ801は、バッテリ15と、逆流防止用ダイオード16と、トランス3の2次巻線701と、V相下側素子11に含まれているスイッチング素子(例えばトランジスタ)11bと、V相上側素子10に含まれているダイオード10aと、フィルタコンデンサ12と、で構成されている。
図8に示すように、昇圧チョッパ801は、スイッチング素子11bと、V相上側素子10に含まれているダイオード10aと、をAC/DCコンバータ20と共有している他、トランス3の2次巻線701をリアクトルとして利用している。
一般的にトランスの2次巻線のインダクタンスは1mHから2mH程度である。このため、トランス3の2次巻線701は、昇圧チョッパ用のリアクトルとしては十分なインダクタンスとして利用できる。
このように、本実施形態にかかる電気車制御装置700は、第1の実施形態と同様にAC/DCコンバータ20に含まれている素子の一部を共有するほかに、トランス3の2次巻線701をリアクトルとして使用して、バッテリ15の電圧を昇圧して、VVVFインバータ13へ加圧し、駆動用主電動機14を駆動させる。なお、駆動させる場合の制御等は、第1の実施形態と同様として説明を省略する。
このように、本実施形態にかかる電気車制御装置700は、新たなリアクトルを設けることを抑止することで、さらなる部品点数の削減を可能とする。これにより、コストアップを抑止することができる。
さらに、本実施形態にかかる電気車制御装置700は、トランス3の2次巻線701をリアクトルとして利用することで、第1の実施形態と同様に放電電流の平滑化を実現できる。
上述した第1~第2実施形態にかかる電気車制御装置では、交流架線の電気車において交流架線電圧を直流電圧に変換するAC/DCコンバータの構成の一部を、昇圧チョッパとして使用した。
これにより、第1~第2実施形態にかかる電気車制御装置は、従来、制御電源用のバッテリで車両を駆動しようとした場合、バッテリ電圧が低いため、バッテリ電圧を直接、駆動用のVVVFインバータの直流へ接続すると、駆動用主電動機を駆動するための電圧としては不足するため、十分な速度と駆動力を得ることができないという問題を解消することが可能となった。
さらに、従来、バッテリの電圧を用いてVVVFインバータへ加圧する際に、VVVFインバータがスイッチングすることで、バッテリからの放電電流にリップル(振動成分)をもち、バッテリが発熱し、バッテリの寿命を縮めてしまう問題点があった。これに対し、第1~第2実施形態にかかる電気車制御装置は、バッテリ15の出力にリアクトル17又はトランス3の2次巻線701を接続して放電電流を平滑化することで、バッテリ15の発熱を防止できる。
このような構成の電気車制御装置は、第1の実施形態の効果に加えて、昇圧チョッパを構成する半導体素子やリアクトルを、主回路に備わっているコンバータ及び主変圧器と併用することにより、昇圧機能を有する電気車制御装置に必要な部品点数を削減でき、そのため小型化を実現することが可能となる。また、部品点数が削減されたことによりコストを削減できる。さらに、昇圧チョッパを設置するスペースを確保する必要がないため、その他の部品配置に柔軟性を持たせることが可能となる。
(第3の実施形態)
図9は、第3の実施形態にかかる電気車制御装置700の主回路構成を示した図である。なお、第3の実施形態では、上述した第1の実施の形態と同一の構成要素には同一の符号を付してその説明を省略する。
図9は、第3の実施形態にかかる電気車制御装置700の主回路構成を示した図である。なお、第3の実施形態では、上述した第1の実施の形態と同一の構成要素には同一の符号を付してその説明を省略する。
第3の実施形態にかかる電気車制御装置700は、AC/DCコンバータ(単相PWMコンバータ)20のU相とV相との間に、低圧のバッテリ15を、リアクトル17を介して接続している。
AC/DCコンバータ(単相PWMコンバータ)20の直流側には、フィルタコンデンサ(平滑コンデンサ)12、VVVFインバータ13と、主電動機である駆動用主電動機14が接続されている。
そして、本実施形態にかかる電気車制御装置700は、駆動用主電動機14に対して、駆動用主電動機14の回転数を検出する回転検出器901が取り付けられている。そして、本実施形態は、回転検出器901により検出された駆動用主電動機14の回転に従って制御部900が制御を行う例とする。
本実施形態にかかる制御部900は、PWM制御器911と、昇圧制御器912と、PWM制御器913と、ダンピング制御器914と、加算器915と、電流制御・ベクトル制御器916と、指令演算器917と、を備えている。
そして、制御部900の指令演算器917は、運転室から指令をもとに演算されたトルク指令と、駆動用主電動機14の回転数とが入力される。指令演算器917は、トルク指令と回転数とに基づいて、D軸電流指令、Q軸電流指令、及び昇圧電圧指令を算出し、出力する。次に、D軸電流及びQ軸電流について説明する。
図10は、VVVFインバータ13から供給される電力で駆動する駆動用主電動機14の例を示した図である。図10に示すように、駆動用主電動機14は、V相1003、U相1004、及びW相1005の3相で構成されている。駆動用主電動機14は、各相の界磁コイルに通電することで発生する回転磁界で、軸1002を回転させる。
そして、本実施形態では、3相(UVW)を、直交2相のαβ軸静止座標系へ変換した後、さらにDQ軸回転座標系に変換して、駆動用主電動機14の制御を行う例とする。なお、これら座標系の変換手法は、周知の技術として説明を省略する。
そして、DQ軸回転座標系において、D軸を駆動用主電動機14の2次磁束方向に設定すると、D軸が励磁成分となり、Q軸がトルク成分となる。すなわち、D軸電流が励磁電流成分となり、Q軸電流がトルク電流成分となる。そして、指令演算器917は、DQ軸回転座標系に基づいて、D軸電流指令、及びQ軸電流指令を出力する。
図9に戻り、ダンピング制御器914は、電圧検出器918で検出されたフィルタコンデンサ(平滑コンデンサ)12の電圧を擬似微分し、ゲインを乗じてQ軸電流指令への補償量を算出する。そして、加算器915が、指令演算器917から出力されたQ軸電流指令値に、ダンピング制御器914から出力されたQ軸電流指令への補償量を加算し、補償後のQ軸電流指令を出力する。
電流制御・ベクトル制御器916は、補償後のQ軸電流指令と、D軸電流指令と、が入力される。そして、電流制御・ベクトル制御器916は、三相電圧指令を、PWM制御器911に出力する。そして、PWM制御器911が、入力される三相電圧指令に基づいて、VVVFインバータ13に内蔵されるスイッチング素子を制御する。
また、指令演算器917は、昇圧電圧指令を昇圧制御器912に出力する。昇圧制御器912は、平滑コンデンサ12の電圧が、昇圧電圧指令と一致するように、PI制御などにより、AC/DCコンバータ(単相PWMコンバータ)20の通流率指令を、PWM制御器913に出力する。本実施形態にかかる電気車制御装置でも、AC/DCコンバータ20の構成の一部を用いて、昇圧チョッパを実現する。
PWM制御器913は、入力された通流率指令に応じて、U相に含まれる素子をスイッチングさせる一方、V相に含まれる下素子を常時オンにする。
なお、昇圧電圧指令=平滑コンデンサ電圧となる場合もある。この場合、昇圧率指令は100%であり、通流率指令は100%となる。そして、PWM制御器913は、U相に含まれる上素子を常時オン、V相の含まれる下素子を常時オンとする。
なお、本実施形態では、昇圧電圧指令を用いた例について説明したが、昇圧電圧指令の代わりに、昇圧率指令を用いても良い。この昇圧率指令を用いて、昇圧率を制御した場合でも、昇圧電圧指令と同様の作用効果を得ることができる。
なお、昇圧率とは、AC/DCコンバータ(単相PWMコンバータ)20のバッテリ15側の直流電圧に対する、AC/DCコンバータ20のVVVFインバータ13側の直流電圧の比率を表したものである。例えば、昇圧率が100%の場合、通流率 100%(U相に含まれる上素子が常時オン)となり、昇圧率=200%の場合、通流率50%(U相の上素子及び下素子が50%のDUTYでスイッチング)となる。
ダンピング制御器914は、上述したように、電圧検出器918で検出された平滑コンデンサ12の電圧を擬似微分し、ゲインを乗じてQ軸電流指令への補償量を算出している。そして、直流電圧が上昇したときに、Q軸電流が増加する、すなわち、トルクを増加させて、平滑コンデンサ12から流れる電流を増加させることは、平滑コンデンサ12に並列に抵抗を備えたことと同等な作用効果となる。平滑コンデンサ12に抵抗が並列に接続されている作用により、エネルギーが消費されることで、共振を抑制できる。
AC/DCコンバータ(単相PWMコンバータ)20の制御、すなわち、昇圧制御器912の中においては、前述のように、昇圧率指令=100%の場合、制御部900が、U相に含まれる上素子を常時オン、V相に含まれる下素子を常時オンとして制御する。その際、ダンピング制御器914が、平滑コンデンサ12に並列に接続した抵抗と同様の作用を有することによって、平滑コンデンサ12とリアクトル17間で発生する共振を抑制するように作用する。なお、昇圧率指令=100%とすることは、AC/DCコンバータ(単相PWMコンバータ)20のスイッチングを停止するとともに、VVVFインバータ13への印加電圧を小さくする。これにより、AC/DCコンバータ(単相PWMコンバータ)20およびVVVFインバータ13のスイッチング損失を低減し、バッテリ15の電流を低減できる。
指令演算器917は、モータ損失や電力変換損失から成る総損失を低減するように、トルク指令・回転数に基づいたD軸電流指令・Q軸電流指令・昇圧電圧指令を決定している。そのため、本実施形態にかかる電気車制御装置は、低圧のバッテリ15の発熱低減により寿命劣化を抑制できる。また、高効率性が向上しているため、限られたバッテリ容量の中で長い距離を走行させることが可能となる。
図11は、回転数、及びVVVFインバータ13へ入力される直流電圧が予め定められている場合に、同一トルクを出力するために必要なD軸電流及びQ軸電流、並びにモータの運転に伴い発生する発熱損失であるモータの銅損の関係を示した図である。極低速で回転する場合、電力変換効率に比べ、モータ効率が低く、モータの損失の中でも銅損が支配的である。図11に示すように、モータ銅損を最小にするためには、D軸電流を130A程度に設定すればよい。このとき、変調率は90%程度であり、出力することが可能である。
このとき、VVVFインバータ13へ入力される直流電圧が図11において定められた直流電圧よりさらに低下する場合、変調率は直流電圧に逆比例して増加するため、変調率が100%を超えることが想定される。変調率が100%を超えると、制御を行うことはできない。直流電圧が下がり変調率が100%を超えるような場合は、図11の矢印で示されるように、指令演算器917ではD軸電流を減少させるようなD軸電流指令を出力する。該D軸電流指令によりD軸電流が減少すると、変調率は低下する。そのため、直流電圧が下がり変調率が100%を超えていた場合でも、変調率を100%より低い数値に移行させることが可能である。つまり、直流電圧の変化に伴い、変調率が100%を超えることを抑止できる。
前述では直流電圧が低下した場合について説明した。次に、図11においてよりQ軸電流指令が大きい場合について説明する。図11に示すように、高いトルクを出力するためQ軸電流指令が大きく、損失が小さい条件では変調率が100%を超えてしまう。このとき、指令演算器917はD軸電流を減少させるD軸電流指令を出力する。これにより、高いトルクの出力を可能としながら、変調率を100%以内に抑止できる。
このように、指令演算器917は、D軸電流指令によって、損失を最小化する点で、必要なトルクを出力し、変調率が100%を超えないように制御を行う。
本実施形態にかかる制御部900は、上述したように、各回転におけるトルク指令に対して、変調率が100%を超えない範囲で、低損失な走行ができるように各種の指令を行うこととした。例えば、変調率は、昇圧チョッパ(本実施形態では単相PWMコンバータ20)の昇圧制御により理論上は任意に変えることができるが、実際には、昇圧率を増加することで、いずれの部位の電圧や電流が増加し、保護電圧や保護電流の制約を受けるほか、昇圧することで、単相PWMコンバータ20およびVVVFインバータ13の損失を増加させる要因となっていた。
そこで、本実施形態にかかる指令演算器917は、トルク指令や回転に応じて、総損失が最小化するように、D軸電流指令、Q軸電流指令、昇圧電圧指令を決定することとした。これにより、損失を抑止することが可能となった。
特に、バッテリ15から供給される電力で走行する場合、車両が加速する間は大トルク・大出力を要求されるものの、所定速度での定速運転に入ると要求されるトルク・出力は低下する。すなわち、車両が加速する間は、指令演算器917が、昇圧動作が行われるように各種指令を出力する。この場合、損失が大きいが出力がとれるように、D軸電流指令には、損失が最小となる電流値よりも小さい電流値が設定されている。
そして、定速運転に入り、低トルク・低出力が要求される場合には、指令演算器917は、昇圧動作が行われないように各種指令(通流率指令0)を出力する。この場合、D軸電流指令には、損失が最小となる電流値が設定される。
なお、指令演算器917が出力するD軸電流指令、Q軸電流指令の設定の手法は、昇圧チョッパ(ここでは単相PWMコンバータ20)が存在せず、直流電圧を任意に変えることができない装置においても同様の作用・効果を奏するものである。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
例えば、一実施形態では、昇圧チョッパ回路201のフィルタコンデンサ12は、1つのコンデンサで構成されているが、2つのコンデンサを直列に接続して、その間を接地してもよい。
1…パンタグラフ、2…交流高速度遮断器、3…トランス、4…車輪、5…充電抵抗投入用接触器、6…充電抵抗短絡用接触器、7…充電抵抗、8…U相上側素子、9…U相下側素子、10…V相上側素子、10a…ダイオード、10b…スイッチング素子、11…V相下側素子、11a…ダイオード、11b…スイッチング素子、12…フィルタコンデンサ、13…VVVFインバータ、14…駆動用主電動機、15…制御電源用バッテリ、16…逆流防止用ダイオード、17…リアクトル、18…プラス側開放接触器、19…マイナス側開放接触器、20…AC/DCコンバータ、100…電気車制御装置、201…昇圧チョッパ、301…スイッチ制御部、311…減算器、312…比例積分制御器、313…減算器、314…比例積分制御器、315…PWM信号発生器、601…バッテリSOC検出機構、602…バッテリSOC判定部、700…電気車制御装置、701…2次巻線、801…昇圧チョッパ、900…制御部、901…回転検出器、911…PWM制御器、912…昇圧制御器、913…PWM制御器、914…ダンピング制御器、915…加算器、916…電流制御・ベクトル制御器、917…指令演算器、918…電圧検出器。
Claims (20)
- 入力側から供給される交流または直流電圧を直流電圧に変換するダイオードとスイッチング素子を有し、出力側にインバータを介して主電動機が接続されるコンバータと、
前記コンバータとリアクトルを介して接続され、前記主電動機の電源を供給するバッテリと、
前記コンバータが有する前記ダイオードと前記スイッチング素子により構成され、前記バッテリの電圧を昇圧するための昇圧チョッパ回路と、
を備える電気車制御装置。 - 前記昇圧チョッパ回路は、前記コンバータの一相に含まれているダイオード及びスイッチング素子とが接続されている請求項1に記載の電気車制御装置。
- 前記バッテリと前記コンバータ間に、前記バッテリへの充電方向電流が流れることを防止する逆流防止用のダイオードが設けられている、
請求項1に記載の電気車制御装置。 - 前記バッテリは、前記主電動機が搭載されている車両を制御するために電力を供給する請求項1に記載の電気車制御装置。
- 前記入力側から供給される交流電圧において、
前記交流電圧を変圧し、前記コンバータに変圧した交流電圧を供給する変圧器と、
前記変圧器の2次巻線側に接続される前記コンバータと、
前記昇圧チョッパ回路は、前記変圧器の2次巻線を前記リアクトルとして用いる、
請求項1に記載の電気車制御装置。 - 昇圧チョッパ回路による昇圧のためのダイオードとスイッチング素子と、前記コンバータのためのダイオードとスイッチング素子の一部を共用することで、前記コンバータと前記昇圧チョッパ回路が一体化構成される、
請求項1に記載の電気車制御装置。 - 前記昇圧チョッパ回路は、フィルタコンデンサをさらに備え、
前記スイッチング素子のオン/オフ周期を変化させることにより、前記バッテリの電圧を昇圧させる、
請求項1に記載の電気車制御装置。 - 前記車両が架線のない場所を移動する場合、前記架線と接触するパンタグラフを非接触にして、前記バッテリから前記インバータに電力が供給される請求項4に記載の電気車制御装置。
- パンタグラフに接続された交流高速度遮断器と、
前記パンタグラフと接続され、前記パンタグラフを介して供給される電圧を前記コンバータ側に供給するトランスと
前記コンバータの入力側に接続され、前記トランスの2次側に接続された充電抵抗短絡用接触器と
前記バッテリと前記昇圧チョッパ回路との間に接続された開放接触器と
をさらに備え、
前記バッテリの電力で走行する際、前記交流高速度遮断器、前記充電抵抗短絡用接触器を開放させ、前記開放接触器を接続することによって、前記昇圧チョッパ回路が、前記スイッチング素子の通流率に従って昇圧が行われる、
請求項4に記載の電気車制御装置。 - 前記車両が架線のある場所を走行する場合、前記交流高速度遮断器、前記充電抵抗短絡用接触器が接続され、前記開放接触器が開放され、前記コンバータは、供給された電力の交流電圧を直流電圧に変換する、
請求項9に記載の電気車制御装置。 - 前記主電動機を駆動するために必要な前記フィルタコンデンサの電圧に関するフィルタコンデンサ電圧指令値が設定され、
前記フィルタコンデンサ電圧指令値と前記フィルタコンデンサから計測された電圧に基づいて、前記バッテリから流れる放電電流を決めるバッテリ放電電流指令値を演算し、
前記バッテリ放電電流指令値と実際のバッテリの放電電流値に基づいて、前記昇圧チョッパ回路の前記スイッチング素子の通流率を演算する、
スイッチ制御部をさらに備えた
請求項7に記載の電気車制御装置。 - さらに、バッテリの充電状態を検出するバッテリ状態検出機構を備え、
前記バッテリ状態検出機構が、前記バッテリの充電状態を検出し、その検出結果に基づいて、前記インバータへ起動指令を出す、
請求項1に記載の電気車制御装置。 - 入力側から供給される交流または直流電圧を直流電圧に変換するダイオードとスイッチング素子を有し、出力側にインバータを介して主電動機が接続されるコンバータと、
前記コンバータと接続されるリアクトルと、前記コンバータが有する前記ダイオードと前記スイッチング素子を含み、バッテリから供給される電圧を昇圧するための、昇圧チョッパ回路と、
を備える電気車制御装置。 - 前記リアクトルに接続され、前記主電動機の電源を供給するバッテリを、さらに備えた請求項13に記載の電気車制御装置。
- 前記昇圧チョッパ回路は、前記コンバータの一相に含まれているダイオード及びスイッチング素子が接続されている請求項14に記載の電気車制御装置。
- 前記コンバータは、少なくともU相とV相の2相を有し、さらにダイオードとスイッチング素子からなるU相上側素子と、ダイオードとスイッチング素子からなるU相下側素子を含み、ダイオードとスイッチング素子からなるV相上側素子と、ダイオードとスイッチング素子からなるV相下側素子を含み、
前記リアクトルは前記U相上側素子とU相下側素子の間、または前記V相上側素子とV相下側素子の間に接続される、
請求項13に記載の電気車制御装置。 - 前記バッテリのマイナス側が前記U相上側素子とU相下側素子の間、または前記V相上側素子とV相下側素子の間に接続される、
請求項13に記載の電気車制御装置。 - 入力側から供給される交流電圧を直流電圧に変換するための複数のダイオードと複数のスイッチング素子を有し、出力側にインバータを介して主電動機が接続されるコンバータと、
前記コンバータが有する少なくとも1つのダイオードと少なくとも1つのスイッチング素子と、前記コンバータと接続されるリアクトルを含む昇圧チョッパ回路と、
架線からの電力を集電する集電装置と、
前記集電装置と接続され、前記集電装置を介して供給される電圧を変圧し、変圧した電圧を前記コンバータ側に供給するトランスと
前記トランスのマイナス側を接地する車輪と
を備えた電気車。 - 前記リアクトルに接続され、前記主電動機の電源を供給するバッテリを、さらに備えた請求項18に記載の電気車。
- 前記コンバータは、少なくともU相とV相の2相を有し、U相、またはV相に前記バッテリのマイナス側が接続されるように構成される、
請求項19に記載の電気車制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280066006.8A CN104024029B (zh) | 2012-01-05 | 2012-06-18 | 电动车控制装置以及电动车 |
| US14/321,298 US9327604B2 (en) | 2012-01-05 | 2014-07-01 | Electric vehicle control apparatus and electric vehicle |
| ZA2014/04882A ZA201404882B (en) | 2012-01-05 | 2014-07-02 | Electric vehicle control apparatus and electric vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-000781 | 2012-01-05 | ||
| JP2012000781 | 2012-01-05 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/321,298 Continuation US9327604B2 (en) | 2012-01-05 | 2014-07-01 | Electric vehicle control apparatus and electric vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013102960A1 true WO2013102960A1 (ja) | 2013-07-11 |
Family
ID=48745038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/003954 WO2013102960A1 (ja) | 2012-01-05 | 2012-06-18 | 電気車制御装置及び電気車 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9327604B2 (ja) |
| JP (1) | JP5972785B2 (ja) |
| CN (1) | CN104024029B (ja) |
| WO (1) | WO2013102960A1 (ja) |
| ZA (1) | ZA201404882B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104842806A (zh) * | 2014-02-13 | 2015-08-19 | 株式会社日立制作所 | 铁路车辆用驱动装置 |
| CN106464121A (zh) * | 2014-06-26 | 2017-02-22 | 株式会社东芝 | 电力变换装置以及车辆用控制装置 |
| CN104467450B (zh) * | 2013-09-13 | 2017-04-12 | 株式会社日立制作所 | 铁道车辆用驱动装置以及铁道车辆 |
| US10468992B2 (en) | 2014-10-22 | 2019-11-05 | Mitsubishi Electric Corporation | Auxiliary power supply device for electric rolling stock |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6154266B2 (ja) * | 2013-09-18 | 2017-06-28 | 公益財団法人鉄道総合技術研究所 | 電気車、電圧変換方法、及びプログラム |
| US9787214B2 (en) | 2013-12-27 | 2017-10-10 | Mitsubishi Electric Corporation | Power conversion device with overvoltage suppression |
| JP6476570B2 (ja) * | 2014-03-25 | 2019-03-06 | 三菱自動車工業株式会社 | 車両制御装置 |
| JP6555172B2 (ja) * | 2016-03-29 | 2019-08-07 | 株式会社豊田自動織機 | 車載用電動圧縮機の制御方法 |
| GB2549489B (en) * | 2016-04-18 | 2020-10-14 | Vivarail Ltd | Convertible electric rail carriage |
| JP6422619B2 (ja) * | 2016-05-25 | 2018-11-14 | 三菱電機株式会社 | 電子制御装置 |
| CN107442895B (zh) * | 2016-05-30 | 2020-07-14 | 上海沪工焊接集团股份有限公司 | 焊机控制电路 |
| JP6786268B2 (ja) * | 2016-06-17 | 2020-11-18 | 東海旅客鉄道株式会社 | 蓄電システム |
| DE112016007157T5 (de) * | 2016-08-19 | 2019-05-02 | Mitsubishi Electric Corporation | Leistungswandler-Vorrichtung |
| JP6867780B2 (ja) * | 2016-10-28 | 2021-05-12 | 矢崎総業株式会社 | 半導体スイッチ制御装置 |
| JP6665821B2 (ja) * | 2017-03-30 | 2020-03-13 | オムロン株式会社 | 双方向dc−dcコンバータ |
| CN107539162A (zh) * | 2017-09-13 | 2018-01-05 | 中车株洲电力机车有限公司 | 一种中低速磁浮列车牵引系统 |
| JP2019118240A (ja) * | 2017-12-27 | 2019-07-18 | 日本電産トーソク株式会社 | 車両用駆動装置 |
| CN109980767A (zh) * | 2017-12-27 | 2019-07-05 | 株洲中车时代电气股份有限公司 | 一种机车双动力供电模式无缝切换方法 |
| WO2019244343A1 (ja) * | 2018-06-22 | 2019-12-26 | 三菱電機株式会社 | 駆動制御装置および鉄道車両用駆動装置 |
| DE102019214870A1 (de) * | 2019-06-17 | 2020-12-17 | Volkswagen Aktiengesellschaft | Schaltungsanordnung für ein Kraftfahrzeug und Verfahren zum Stabilisieren einer Gleichspannung eines Hochvolt-Gleichspannungszwischenkreises in einem Kraftfahrzeug |
| KR102264458B1 (ko) * | 2019-07-15 | 2021-06-17 | 한국철도기술연구원 | 하이브리드 에너지 저장장치 |
| JP7244378B2 (ja) | 2019-07-17 | 2023-03-22 | ファナック株式会社 | 電力変換装置及びその制御方法 |
| JP2021048696A (ja) | 2019-09-18 | 2021-03-25 | 株式会社東芝 | 充放電装置 |
| DE102020200990A1 (de) * | 2020-01-28 | 2021-07-29 | Volkswagen Aktiengesellschaft | Vorladeschaltung und straßengeführtes Kraftfahrzeug |
| EP3876413A1 (en) * | 2020-03-06 | 2021-09-08 | ABB Schweiz AG | Multiuse of phase legs in a power supply system for a traction unit |
| WO2022123699A1 (ja) * | 2020-12-09 | 2022-06-16 | 三菱電機株式会社 | 車両用変圧器およびそれを備える車両 |
| FR3143461A1 (fr) * | 2022-12-16 | 2024-06-21 | Psa Automobiles Sa | Vehicule automobile comprenant un moyen de chauffage de cellules de batterie sur la base d’un courant alternatif d’onduleur, et procede et programme sur la base d’un tel vehicule |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002369308A (ja) * | 2001-06-12 | 2002-12-20 | Railway Technical Res Inst | 電気車両システム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3211071B2 (ja) * | 1994-03-29 | 2001-09-25 | 株式会社日立製作所 | 電力変換装置 |
| JPH09130995A (ja) * | 1995-10-31 | 1997-05-16 | Toshiba Corp | 無停電電源装置 |
| AT500328B1 (de) * | 2002-02-07 | 2010-03-15 | Elin Ebg Traction Gmbh | Fahrzeug mit einem elektrischen antrieb und verfahren zum betrieb eines solchen fahrzeuges |
| CN2546245Y (zh) * | 2002-07-02 | 2003-04-23 | 四川大学 | 节能型电动车驱动装置 |
| JP4925181B2 (ja) * | 2006-03-09 | 2012-04-25 | 国立大学法人長岡技術科学大学 | 電力システム |
| JP2007295720A (ja) * | 2006-04-25 | 2007-11-08 | Denso Corp | 車両用モータ装置 |
| JP4814825B2 (ja) * | 2007-03-30 | 2011-11-16 | 公益財団法人鉄道総合技術研究所 | ハイブリッド電源システム |
| US8860356B2 (en) * | 2007-09-18 | 2014-10-14 | Kabushiki Kaisha Toshiba | Variable magnetic flux motor drive system |
| DE102008014571A1 (de) * | 2008-03-13 | 2009-09-17 | Siemens Aktiengesellschaft | Motoransteuerschaltung für ein Schienenfahrzeug und Verfahren zu deren Betrieb |
| US8080973B2 (en) * | 2008-10-22 | 2011-12-20 | General Electric Company | Apparatus for energy transfer using converter and method of manufacturing same |
| JP5558022B2 (ja) | 2009-04-15 | 2014-07-23 | 株式会社東芝 | 電気車の蓄電制御装置及び蓄電制御方法 |
| JP2011004566A (ja) * | 2009-06-22 | 2011-01-06 | Toshiba Corp | 電気車補助電源装置 |
| JP5493532B2 (ja) * | 2009-07-17 | 2014-05-14 | 富士電機株式会社 | 負荷駆動装置及びこれを使用した電気自動車 |
| US9000711B2 (en) * | 2010-02-17 | 2015-04-07 | Fuji Electric Co., Ltd. | Power converter |
-
2012
- 2012-06-18 CN CN201280066006.8A patent/CN104024029B/zh active Active
- 2012-06-18 WO PCT/JP2012/003954 patent/WO2013102960A1/ja active Application Filing
- 2012-12-28 JP JP2012289085A patent/JP5972785B2/ja active Active
-
2014
- 2014-07-01 US US14/321,298 patent/US9327604B2/en active Active
- 2014-07-02 ZA ZA2014/04882A patent/ZA201404882B/en unknown
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002369308A (ja) * | 2001-06-12 | 2002-12-20 | Railway Technical Res Inst | 電気車両システム |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104467450B (zh) * | 2013-09-13 | 2017-04-12 | 株式会社日立制作所 | 铁道车辆用驱动装置以及铁道车辆 |
| CN104842806A (zh) * | 2014-02-13 | 2015-08-19 | 株式会社日立制作所 | 铁路车辆用驱动装置 |
| CN106464121A (zh) * | 2014-06-26 | 2017-02-22 | 株式会社东芝 | 电力变换装置以及车辆用控制装置 |
| US10468992B2 (en) | 2014-10-22 | 2019-11-05 | Mitsubishi Electric Corporation | Auxiliary power supply device for electric rolling stock |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104024029A (zh) | 2014-09-03 |
| ZA201404882B (en) | 2015-12-23 |
| CN104024029B (zh) | 2017-03-01 |
| US9327604B2 (en) | 2016-05-03 |
| US20140312810A1 (en) | 2014-10-23 |
| JP2013158232A (ja) | 2013-08-15 |
| JP5972785B2 (ja) | 2016-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5972785B2 (ja) | 電気車制御装置 | |
| US10525833B2 (en) | Tactical vehicle to grid electric power architecture | |
| JP6821294B2 (ja) | 電気自動車の充電システム | |
| US8143824B2 (en) | Regenerating braking system including synchronous motor with field excitation and control method thereof | |
| US9018792B2 (en) | Arrangement for operating consumers in a rail vehicle with electrical energy, selectively from an energy supply network or from a motor-generator combination | |
| US9315112B2 (en) | Power source apparatus for electrically powered vehicle and control method therefor | |
| US8098039B2 (en) | Generator motor driving device and method for discharging charges from capacitor of generator motor driving device | |
| JP5365586B2 (ja) | 電力変換装置 | |
| US20190031125A1 (en) | Electric system architecture for range extended electric vehicles | |
| US20110254494A1 (en) | Rapid reversible charging device for an electric vehicle | |
| US20140239869A1 (en) | Electrical System | |
| JP2014524731A (ja) | 電気駆動装置の構成部分を使用した電気駆動装置のバッテリの充電方法および装置 | |
| EP2452848B1 (en) | Electric vehicle control device | |
| JP2011182521A (ja) | 電源システムおよびそれを搭載する車両 | |
| EP3441255B1 (en) | Electrical power system for hybrid or electric vehicle | |
| EP2719888A1 (en) | Dual-DC bus starter/generator | |
| JP2009060759A (ja) | 電源システムおよびその充電制御方法 | |
| JP2015216825A (ja) | 平滑回路を有するパワースイッチング装置 | |
| JP2016007118A (ja) | 回転電機システム | |
| JP2015216824A (ja) | トラクションモータ駆動装置 | |
| JP2014093883A (ja) | 動力出力装置 | |
| WO2024172050A1 (ja) | 車載充電装置及び車載充電方法 | |
| JP2013017324A (ja) | 電源システムおよびその制御方法 | |
| JP2008148498A (ja) | 低電圧大電流モータ用電源 | |
| KR20240136509A (ko) | 전기자동차용 충전 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12864170 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12864170 Country of ref document: EP Kind code of ref document: A1 |