RU2540249C2 - Гироскопический датчик - Google Patents
Гироскопический датчик Download PDFInfo
- Publication number
- RU2540249C2 RU2540249C2 RU2012123939/28A RU2012123939A RU2540249C2 RU 2540249 C2 RU2540249 C2 RU 2540249C2 RU 2012123939/28 A RU2012123939/28 A RU 2012123939/28A RU 2012123939 A RU2012123939 A RU 2012123939A RU 2540249 C2 RU2540249 C2 RU 2540249C2
- Authority
- RU
- Russia
- Prior art keywords
- base
- gyroscopic sensor
- sensor
- electrode holder
- electrical
- Prior art date
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/567—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using the phase shift of a vibration node or antinode
- G01C19/5691—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using the phase shift of a vibration node or antinode of essentially three-dimensional vibrators, e.g. wine glass-type vibrators
Abstract
Изобретение относится к гироскопическому датчику (2), содержащему:
чувствительный элемент (4), выполненный с возможностью вибрирования;
электрододержатель (8), способный поддерживать электроды (20) возбуждения/обнаружения для возбуждения чувствительного элемента (4) и обнаружения вибрации чувствительного элемента (4); и элементы (10, 16) для установки электрододержателя (8); характеризующийся тем, что поддерживающие элементы (10, 16) содержат основание (10), выполненное из материала, имеющего плотность менее чем 5 кг/дм3, и квадратный корень отношения модуля Юнга, деленного на указанную выше плотность больше чем 9 ГПа1/2дм3/2/кг-1/2. Техническим результатом является повышение точности измерений и снижение влияния паразитного вибрационного режима за счет оптимизации технических параметров. 15 з.п. ф-лы, 5 ил.
Description
Настоящее изобретение относится к гироскопическому датчику, содержащему:
- чувствительный элемент, предназначенный для вибрации;
- электрододержатель, для установки электродов возбуждения вибрации и электродов обнаружения вибрации чувствительного элемента; и
- элементы для установки электрододержателя.
Элементы для установки электрододержателя содержат основание и разделяющий элемент, вставленный между основанием и электрододержателем. Разделяющий элемент выполнен таким образом, чтобы изолировать электрододержатель и чувствительный элемент относительно друг друга от влияния температурных изменений размеров основания, воздействию которых подвергается датчик. Например, он содержит поддерживающие стержни для электрододержателя, выполненные таким образом, чтобы проходить прямо через основание, для передачи сигналов между электродами и электронной цепью, как описывается в FR 2805039.
Такой датчик обычно прикрепляется к опоре, называемой инерционный стержень. Этот инерционный стержень затем встраивается в инерциальную измерительную систему, которая оснащается электрододержателем, подвергаемым вибрации или сотрясению. Поскольку датчик прочно прикрепляется к инерционному стержню, он может подвергаться воздействию этих вибраций во время использования электрододержателя. Вибрационные режимы чувствительного элемента, индуцируемые вибрациями электрододержателя, в дальнейшем именуются паразитическими вибрационными режимами.
Для того чтобы не усиливать вибрации от электрододержателя, основание такого датчика обычно изготавливается из неэластичного материала. Например, основание является металлической пластиной толщиной 10 мм, имеющей массу около 70 г. Поэтому инерционный датчик является тяжелым и громоздким.
Связанная с этим инерционная информация лежит в диапазоне частот в 100 Гц по обе стороны вибрационной резонансной частоты гироскопического датчика. Инерционная информация содержит в себе информацию, соответствующую углу вращения или скорости вращения держателя гироскопического датчика. Вибрационная резонансная частота гироскопического датчика в дальнейшем именуется «полезным» вибрационным режимом. Взаимовлияния между механическими паразитическими вибрационными режимами и «полезным» вибрационным режимом оказывают вредное влияние на технические характеристики гироскопического датчика.
Чтобы гарантировать оптимальные технические характеристики гироскопического датчика, желательно обеспечить гироскопический датчик, имеющий первый паразитический вибрационный режим, расположенный далеко от «полезного» вибрационного режима.
Одной из задач изобретения, в частности, является создание легкого и компактного гироскопического датчика, который в меньшей степени подвергается влиянию механического паразитического вибрационного режима.
Другой задачей изобретения является создание гироскопического датчика для получения более точного измерения угла поворота.
Дополнительной задачей изобретения является создание гироскопического датчика, имеющего герметизированное основание, через которое проходят электрические соединения.
Для достижения этой цели предметом изобретения является гироскопический датчик, содержащий:
- чувствительный элемент, предназначенный для вибрирования;
- электрододержатель, предназначенный для поддерживания электродов для возбуждения чувствительного элемента и для обнаружения вибрации чувствительного элемента; и
- элементы для установки электрододержателя;
при этом следует обратить внимание, что датчик, находящийся в таких поддерживающих элементах, содержит основание, выполненное из материала, имеющего плотность менее чем 5 кг/дм3, и квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, больше чем 9 ГПа1/2дм3/2/кг-1/2.
В соответствии с частными вариантами осуществления изобретения гироскопический датчик характеризуется одним или более из следующих признаков:
- материал, из которого выполнено основание, имеет плотность между 1.5 кг/дм3 и 5 кг/дм3, а квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, находится между 9 ГПа1/2дм3/2/кг-1/2 и 12 ГПа1/2дм3/2/кг-1/2;
- вышеуказанный материал содержит бериллий;
- вышеуказанный материал содержит керамику;
- керамика является оксидом алюминия;
- керамика является результатом совместного обжига
- основание изготавливается с помощью высокотемпературного совместного обжига керамических слоев и интегрированных электрических соединений;
- основание изготавливается с помощью низкотемпературного совместного обжига керамических слоев и интегрированных электрических соединений;
- гироскопический датчик, в соответствии с изобретением, включает в себя электрические соединения, интегрированные в основание, и электронную цепь, электрически присоединенную к электрическим соединениям;
- поддерживающие элементы содержат проводящие поддерживающие стержни, вставленные между основанием и электрододержателем, при этом вышеуказанные поддерживающие стержни на одной стороне припаяны к электрическим контактам электрических соединений, а с другой стороны присоединены к электродам возбуждения/обнаружения электрододержателя;
- гироскопический датчик, в соответствии с изобретением, включает в себя корпус для защиты электронной цепи, припаянный к основанию;
- основание включает в себя интегрированные в нее матрицу штырьков, выступающих на внутренней стороне корпуса, и матрицу дополнительных штырьков, выступающих на наружной стороне корпуса, при этом, по меньшей мере, некоторые из вышеуказанных электрических соединений основания способны присоединять матрицу штырьков к матрице дополнительных штырьков;
- датчик, в соответствии с изобретением, выполнен таким образом, чтобы прикрепляться к инерционному стержню, при этом вышеуказанный датчик содержит:
- защитное кольцо, расположенное на электрододержателе; и
- средства электрического соединения для соединения между вышеуказанным защитным кольцом с одной стороны и электронной цепью или вышеуказанным корпусом с другой стороны, или обоими этими компонентами, при этом вышеуказанные средства электрического соединения присоединяются к электрическому земляному контакту инерционного стержня;
- гироскопический датчик, в соответствии с изобретением, выполнен таким образом, чтобы прикрепляться к инерционному стержню, при этом вышеуказанный датчик содержит кожух, прикрепляемый к основанию, и вышеуказанный кожух присоединяется к электрическому земляному контакту инерционного стержня;
- вышеуказанный гироскопический датчик включает в себя, по меньшей мере, один эластичный электрический соединитель вдоль осевого направления, при этом вышеуказанный соединитель размещается между электрододержателем и основанием; и
- вышеуказанный гироскопический датчик выполнен таким образом, чтобы прикрепляться к инерционному стержню через четыре элемента крепления.
Изобретение будет более понятным после прочтения последующего описания, данного исключительно в качестве примера, и со ссылками на чертежи, в которых:
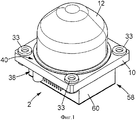
- фиг.1 - вид в перспективе гироскопического датчика, в соответствии с изобретением;
- фиг.2 - осевой разрез гироскопического датчика, проиллюстрированного на фиг.1;
- фиг.3 - вид сверху основания гироскопического датчика, проиллюстрированного на фиг.1;
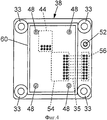
- фиг.4 - вид снизу основания гироскопического датчика, проиллюстрированного на фиг.1, когда вышеуказанное основание не снабжено кожухом и электронной цепью; и
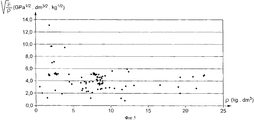
- фиг.5 - график, иллюстрирующий квадратный корень отношения модуля Юнга, деленного на плотность, в соответствии с плотностью для различных материалов и сплавов.
Изобретение описывает гироскопический датчик, имеющий резонатор в форме колокола или сферического колпака. Однако изобретение может применяться для различных других типов инерционного датчика, и, особенно, для акселерометра.
Рассмотрим фиг.1 и 2, на которых гироскопический датчик 2, в соответствии с изобретением, содержит:
- чувствительный элемент, называемый в дальнейшем резонатор 4, который может быть выполнен, главным образом, полусферической формы, как проиллюстрировано на чертеже, и который имеет вал 6 для его крепления;
- компонент, несущий на себе электроды, необходимые для работы резонатора 4, в дальнейшем называемый электрододержатель 8, в котором закрепляется вал 6 резонатора 4;
- основание 10 для крепления гироскопического датчика к поддерживающему элементу, называемому инерционный стержень 11; и
- кожух 12, прикрепляемый к основанию 10 и образующий вместе с основанием вакуумированную камеру 14, содержащую электрододержатель 8 и резонатор 4. Газопоглотитель размещается в камере 14, для того чтобы поглощать остаточные частицы или газы, которые являются возможной причиной для нарушения вакуума в вышеуказанной герметичной камере.
Электрододержатель 8 может иметь различные конфигурации. Он может быть плоским, с электродами, размещенными на внешнем слое торцевой поверхности 15 резонатора 4, как проиллюстрировано на фиг.2. Он может быть также полусферическим, с электродами, размещенными на внешнем слое внутренней поверхности резонатора. Эта конфигурация не проиллюстрирована.
Электрододержатель 8 поддерживается восемью проводящими поддерживающими стержнями 16, поддерживаемыми основанием 10.
Поддерживающие стержни 16 выполнены таким образом, чтобы эластично деформироваться в случае различного температурного расширения электрододержателя 8 с основанием 10, или в случае ускорения или сотрясения, направленных параллельно плоскости основания 10.
Нижний конец поддерживающих стержней 16 припаивается к основанию 10. Это припаивание выполняется между двумя поверхностями плоскости на определенное место, для того чтобы можно было знать вибрационные частоты поддерживающих стержней, которые должны быть точно известны, чтобы устранять их паразитическую вибрацию с помощью цифрового фильтрования.
Торцевая поверхность 15 и внешний край 15А резонатора 4 металлизируются. Они проектируются таким образом, чтобы иметь заданный потенциал. Для этой цели внутренняя поверхность резонатора 4 и вала 6 имеют электрическое соединение 18 с торцевой поверхностью 15.
Электрическое соединение 18 имеет связь с первой электрической муфтой 28, расположенной приблизительно под валом 6. Эта первая электрическая муфта 28 является эластичной вдоль осевого направления вала 6 резонатора и вдоль направления, перпендикулярного ему. Поскольку поддерживающие стержни 16 проектируются таким образом, чтобы деформироваться симметрично в каждую из сторон вала 6, деформация вдоль осевого направления первой электрической муфты 28 дает возможность компенсировать любые изменения в расстоянии между электрододержателем 8 и основанием 10, которые вызываются ускорениями, сотрясениями или различными температурными расширениями между электрододержателем 8 и основанием 10.
Первая электрическая муфта 28 содержит, например, стойку 30, прикрепленную к основанию 10, и пружину 32, прикрепленную к стойке 30, и находится в контакте с электрическим соединением 18.
Электроды 20 для возбуждения резонатора 4 и для обнаружения вибрации резонатора 4, вместе с защитным кольцом (не показано), присоединенные к электроду 20, располагаются на электрододержателе 8.
В частности, каждый электрод 20 проходит через главную наружную поверхность 22 электрододержателя, через торцевую поверхность 24, и через другую главную наружную поверхность 26, противоположную главной поверхности 22. Поддерживающие стержни 16 прикрепляются к электродам 20 электрододержателя, например, с помощью проводящего клея или с помощью припаивания.
Вторая электрическая муфта 29, аналогичная первой электрической муфте 28, служит для присоединения защитного кольца электрододержателя 8 к основанию 10.
Электроды 20 возбуждения/обнаружения направлены противоположно торцевой поверхности 15 резонатора. Они включают в себя Т-образный участок, проходящий в направлении к границе основания 10. Защитное кольцо имеет центральный участок, проходящий к внутренней части электродов 20 возбуждения/обнаружения, по меньшей мере один периферийный участок, проходящий к наружной части электродов 20 возбуждения/обнаружения, и по меньшей мере одно соединение, проходящее между электродами 20 возбуждения/обнаружения, чтобы соединять центральный участок и периферийный участок.
Силовые линии, расположенные между электродами 20 возбуждения/обнаружения и торцевой поверхностью 15, позволяют измерять вибрации резонатора. Силовые линии, расположенные на каждой стороне торцевой поверхности 15 резонатора, изогнуты в направлении центрального участка и периферийного участка защитного кольца.
Основание 10 обеспечивается четырьмя элементами 33 для крепления их к инерционному стержню 11, например, образованные гладкими или резьбовыми отверстиями. Как вариант, основание 10 зажимается на инерционном стержне 11. В соответствии с другим вариантом, гладкие или резьбовые отверстия выполняются в основании 10, чтобы прикреплять датчик к инерционному стержню. Как вариант, основание 10 обеспечивается различным количеством элементов 33 для крепления их к инерционному стержню.
Для квадратного основания 10, имеющего толщину "h", длину "а" стороны и фиксируемого в четырех точках, разнесенных на расстояние "b" от каждой границы основания 10, аналитическое компьютерное моделирование позволяет выяснить, что режим механической паразитической вибрации изменяется в соответствии со следующим уравнением:

где h является толщиной основания 10,
а является длиной стороны основания 10,
λ1 является параметром, который зависит от длины "а" стороны и от расстояния "b",
Е является модулем Юнга материала основания 10,
ρ является плотностью материала основания 10,
ν является коэффициентом Пуассона материала основания 10.
Задача нахождения для легкого гироскопического датчика, имеющего первый режим паразитической вибрации, далекий от «полезного» режима вибрации, может выражаться как нахождение минимальной толщины hmin, из условия чтобы F1≥F. При этом приведенное выше уравнение может быть переписано следующим образом:

Были протестированы две сотни различных материалов и сплавов. Некоторые из результатов можно увидеть на фиг.5. Как видно из этой фигуры, гироскопический датчик будет улучшать свои характеристики при выборе материала, имеющего плотность менее чем 5 кг/дм3, а квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, больше чем 9 ГПа1/2дм3/2/кг-1/2, т.е.

при этом Е является модулем Юнга данного материала, а ρ является его плотностью.
Предпочтительно, чтобы плотность вышеуказанного материала находилась между 1,5 и 5, а квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, находился между 9 ГПа1/2дм3/2/кг-1/2 и 12 ГПа1/2дм3/2/кг-1/2, т.е.

Использование такого материала будет уменьшать режимы паразитической вибрации и сокращать массу от двух или трех раз, а также размер основания в два раза по отношению к другим классическим материалам, используемым для основания 10.
В соответствии с первым вариантом осуществления изобретения этот материал содержит бериллий. Предпочтительно основание 10 целиком выполнено из бериллия или бериллиевого сплава. В соответствии с этим вариантом осуществления изобретения поддерживающие стержни проходят прямо через основание и с сохранением герметичности прикрепляются к основанию за счет формирования стеклянного уплотнения.
В соответствии со вторым вариантом осуществления изобретения этот материал содержит керамику и предпочтительно оксид алюминия. В соответствии с изобретением керамика является спекаемым или неспекаемым изделием, с кристаллической или частично кристаллической структурой, или стеклом, корпус которого формируется по существу из неорганических или неметаллических веществ, и который формируется из расплавленной массы, застывающей при охлаждении, или который формируется и забирается для дозревания, в то же самое время или впоследствии, под воздействием тепла (ASTM С 242). Разграничение делается между оксидами, керамикой на основе безкислородных соединений (нитридов, карбидов, боридов и т.д.) и композитной керамикой сплавов керамики на основе кислородных и безкислородных соединений.
Основание 10 предпочтительно имеет толщину около 4 мм и массу около 20 г.
В частности, основание 10 изготавливается с помощью совместного обжига керамических слоев, первых электрических соединений 34, вторых электрических соединений 35 и штырьков.
Предпочтительно, совместный обжиг керамики выполняется при высокой температуре.
В качестве варианта, совместный обжиг керамики выполняется при низкой температуре.
Процессы, используемые для производства керамического основания совместного обжига при высокой температуре и керамического основания совместного обжига при низкой температуре, в целом называются процессами НТСС (High-Temperature Cofired Ceramic - керамика совместного обжига при высокой температуре) и LTCC (Low-Temperature Cofired Ceramic - керамика совместного обжига при низкой температуре).
Первые электрические соединения 34 присоединяют восемь поддерживающих стержней 16, первую электрическую муфту 28, и вторую электрическую муфту 29 к электронной цепи 36. Эта электронная цепь 36 присоединяется к наружной поверхности 38 основания, которая в дальнейшем называется нижней наружной поверхностью 38, при этом она находится на противоположной стороне относительно наружной поверхности 40, обращенной в сторону электрододержателя, которая в дальнейшем называется верхней наружной поверхностью 40.
Рассмотрим фиг.3 и 4. Первые электрические соединения 34 содержат восемь электрических контактов 42, выходящих на верхнюю наружную поверхность 40 основания. Эти электрические контакты 42 присоединяются электрически к первой матрице 44 из восьми штырьков, выходящих на нижнюю наружную поверхность 38. Электрические контакты 42 припаиваются к восьми поддерживающим стержням 16. Первая матрица 44 из восьми штырьков присоединяется к электронной цепи 36 с помощью электрического соединения, припаивания или ультразвуковой сварки (также называемая термокомпрессионная сварка "шариком" или термокомпрессия клином).
Первые электрические соединения 34 содержат электрический контакт 46, выходящий на верхнюю наружную поверхность 40. Электрический контакт 46 припаивается ко второй электрической муфте 29 и присоединяются электрически к четырем штырькам 48, выходящим на нижнюю наружную поверхность 38. Четыре штырька 48 присоединяются к электронной цепи 36.
Четыре штырька 48 также способны удерживать электронную плату 36 на заданном расстоянии от основания 10, для того чтобы можно было разместить электронные компоненты на какой-либо стороне электронной платы. В качестве варианта штырьки 48 заменяются электрическими соединениями, а электронная плата прикрепляется непосредственно к наружной поверхности 38, например, с помощью клеевого соединения.
Кроме того, первые электрические соединения 34 включают в себя электрический контакт 50, выходящий на верхнюю наружную поверхность 40. Этот электрический контакт 50 присоединяется электрически к штырьку 52, выходящему на нижнюю наружную поверхность 38. Электрический контакт 50 припаивается к первой электрической муфте 28. Штырек 52 предназначается для ввода высокого напряжения, которое будет подаваться к торцевой поверхности 15 резонатора через первую электрическую муфту 38.
Вторые электрические соединения 35 интегрированы в основание 10 (они схематически показаны на фиг.4), и содержат вторую 54 и третью 56 матрицы штырьков, выходящих на нижнюю наружную поверхность 38 основания. Штырьки второй матрицы 54 электрически присоединяются к штырькам третьей матрицы 56 с обеспечением герметичности. Штырьки второй матрицы 54 присоединяются к электронной цепи 36. Штырьки третьей матрицы 56 предназначаются для присоединения внешнего разъема к гироскопическому датчику 2.
Как вариант, некоторые из штырьков матрицы 56 могут также служить для механического удерживания вышеуказанного внешнего разъема на основании 10.
Гироскопический датчик 2 дополнительно включает в себя корпус 58 для защиты электронной цепи 36. Этот корпус 58 содержит раму 60, припаянную к нижней наружной поверхности 38 основания, и крышку 62, прикрепленную к раме 60. Этот корпус 58 позволяет поддерживать электронную цепь 36 в контролируемой атмосфере.
Рама 60 корпуса 58 проходит только над частью нижней наружной поверхности 38 основания. Корпус 58 выполнен таким образом, чтобы содержать электронную цепь 36, первую 44 и вторую 54 матрицы штырьков, а также штырьки 48. Третья матрица штырьков 56 и штырек 52 располагаются с наружной стороны корпуса 58.
Как вариант, матрицы штырьков 44, 54 и 56 заменяются металлизированными контактными площадками.
Средства 20, 29, 33, 34, 35, 48 электрического соединения позволяют электрическому земляному контакту гироскопического датчика 2 присоединяться к электрическому земляному контакту стержня 11. В частности защитное кольцо, размещенное на электрододержателе 8, электронная цепь 36, корпус 58, кожух 12, а также вторая 54 и третья 56 матрицы штырьков присоединяются к электрическому земляному контакту инерционного стержня 11 через определенные электроды 20, вторую электрическую муфту 29, определенные электрические соединения 34, 35, элементы 33 крепления и штырьки 48. Эти элементы, присоединенные к земляному контакту, создают «клетку Фарадея», спроектированную таким образом, чтобы гарантировать, что гироскопический датчик может работать в окружающем пространстве, содержащем электромагнитные волны.
Достигается преимущество, заключающееся в том, что гироскопический датчик 2 может быть легко протестирован через соединения, особенно соединения с первой матрицей штырьков 44, когда крышка 62 не установлена на раму 60. Затем, когда гироскопический датчик уже протестирован, электронная цепь 36 присоединяется к штырькам основания, а крышка 62 прикрепляется к раме 60.
Достигается преимущество, заключающееся в том, что основание изготавливается как единая часть, а поддерживающие стержни 16 не проходят через основание 10, для того чтобы сделать вышеуказанное основание полностью герметичным.
Достигается преимущество, заключающееся в том, что за счет припаивания конца поддерживающих стержней 16 к плоскости верхней наружной поверхности 40 основания существует возможность лучше контролировать вибрационные режимы поддерживающих стержней.
Достигается преимущество, заключающееся в том, что использование основания из керамики совместного обжига позволяет свободно позиционировать матрицу штырьков 44, чтобы таким образом уменьшить опорную поверхность электронных плат 36.
В гироскопическом датчике существующего уровня техники поддерживающие стержни 16 проходят прямо через основание и прикрепляются к основанию с сохранением герметичности за счет формирования стеклянного уплотнения, т.е. за счет расплавления капли стекла между поддерживающим стержнем и отверстием, проделанным в основании. Место, в котором происходит затвердевание капель расплавленного стекла при охлаждении, не может строго контролироваться. Однако частота вибрации поддерживающих стержней зависит от места, где поддерживающие стержни прикрепляются к основанию. Эта частота вибрации оказывает влияние на измерение угла вращения, выполняемого гироскопическим датчиком, когда он подвергается вибрациям или сотрясениям.
В вибрирующем гироскопическом датчике эта частота вибрации, как правило, составляет несколько кГц (например, 3 кГц), и должна точно контролироваться, например, в пределах ± 100 Гц. Поскольку положение, где капли стекла затвердевают, в гироскопическом датчике существующего уровня техники не может строго контролироваться, частота вибрации каждого поддерживающего стержня может быть различной. В результате этого частота вибрации не может быть легко скорректирована за счет электронного процесса обработки для гироскопического датчика существующего уровня техники. Кроме того, трудно достаточно хорошо герметизировать основание гироскопического датчика существующего уровня техники с заданным количеством поддерживающих стержней, проходящих через него, и трудно получить хорошее стеклянное уплотнение.
Кроме того, другой задачей изобретения является создание гироскопического датчика, улучшающего решение, по меньшей мере, одной из упомянутых выше проблем.
Для достижения этой последней из названных целей предметом изобретения является гироскопический датчик, содержащий:
- чувствительный элемент 4, предназначенный для вибрации;
- электрододержатель 8 для поддержки электродов 20 возбуждения и электродов 20 для обнаружения вибрации чувствительного элемента; и
- элементы 10, 16 для установки электрододержателя,
характеризующийся тем, что поддерживающие элементы 10, 16 содержат основание 10, выполненное из изолирующего материала, а также тем, что электрические соединения 34, 35 интегрированы в основание 10.
Электрическое соединение 34 проходит через основание 10, но не окружается каким-либо другим материалом, кроме материала основания. Встраивание электрических соединений 34 выполняется способами, используемыми для изготовления интегрированной цепи, подобными способу совместного обжига при высокой температуре или совместного обжига при низкой температуре. Основание 10 является цельным, т.е. моноблоком. Таким образом, все основание 10 является одной деталью. Через него не проходят поддерживающие стержни или любые другие элементы. Следовательно, вибрационная частота поддерживающих стержней больше не оказывает влияния на измерение угла вращения, выполняемого гироскопическим датчиком. Обеспечивается преимущество, заключающееся в том, что основание 10 является более герметичным. Обеспечивается преимущество, заключающееся в том, что процесс производства гироскопического датчика упрощается, и поэтому является менее дорогим.
Основание 10 этого гироскопического датчика может быть выполнено из материала, который не имеет:
- плотность менее чем 5 кг/дм3 и
- квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, больше чем 9 ГПа1/2дм3/2/кг-1/2.
Например, основание 10 может быть выполнено из керамического материала, аналогичного материалу, продаваемому под зарегистрированными торговыми марками "Dupont 951" и "Dupont 943", а также из металлического композита, например, аналогичного материалам "Ferro A6M" и "Ferro A6S".
В качестве варианта этот гироскопический датчик содержит любой из признаков, описанных в пунктах с 6 по 16 формулы изобретения.
Claims (16)
1. Гироскопический датчик (2), содержащий
- чувствительный элемент (4), выполненный с возможностью вибрации и имеющий полусферическую форму или форму колокола;
- электрододержатель (8), предназначенный для поддержки электродов (20) возбуждения/обнаружения для возбуждения чувствительного элемента (4) и обнаружения вибрации чувствительного элемента (4); и
- элементы (10, 16) для установки электрододержателя (8),
характеризующийся тем, что поддерживающие элементы (10, 16) содержат основание (10), выполненное из материала, имеющего плотность менее чем 5 кг/дм3, и квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, больше чем 9 ГПа1/2дм3/2/кг-1/2.
- чувствительный элемент (4), выполненный с возможностью вибрации и имеющий полусферическую форму или форму колокола;
- электрододержатель (8), предназначенный для поддержки электродов (20) возбуждения/обнаружения для возбуждения чувствительного элемента (4) и обнаружения вибрации чувствительного элемента (4); и
- элементы (10, 16) для установки электрододержателя (8),
характеризующийся тем, что поддерживающие элементы (10, 16) содержат основание (10), выполненное из материала, имеющего плотность менее чем 5 кг/дм3, и квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, больше чем 9 ГПа1/2дм3/2/кг-1/2.
2. Гироскопический датчик (2) по п.1, отличающийся тем, что вышеуказанный материал имеет плотность между 1,5 кг/дм3 и 5 кг/дм3, а квадратный корень отношения модуля Юнга, деленного на указанную выше плотность, находится между 9 ГПа1/2дм3/2/кг-1/2 и 12 ГПа1/2дм3/2/кг-1/2.
3. Гироскопический датчик (2) по п.1, отличающийся тем, что вышеуказанный материал содержит бериллий.
4. Гироскопический датчик (2) по п.1, отличающийся тем, что вышеуказанный материал содержит керамику.
5. Гироскопический датчик (2) по п.4, в котором керамика является оксидом алюминия.
6. Гироскопический датчик (2) по п.4, отличающийся тем, что керамика является результатом совместного обжига.
7. Гироскопический датчик (2) по п.6, отличающийся тем, что основание (10) выполнено путем высокотемпературного совместного обжига керамических слоев и интегрированных электрических соединений (34).
8. Гироскопический датчик (2) по п.6, отличающийся тем, что основание (10) выполнено путем низкотемпературного совместного обжига керамических слоев и интегрированных электрических соединений (34).
9. Гироскопический датчик (2) по п.1, отличающийся тем, что включает в себя электрические соединения (34, 35), интегрированные в основание (10), и электронную цепь (36), электрически присоединенную к электрическим соединениям (34, 35).
10. Гироскопический датчик (2) по п.9, отличающийся тем, что поддерживающие элементы (10, 16) содержат проводящие поддерживающие стержни (16), вставленные между основанием (10) и электрододержателем (8), при этом вышеуказанные поддерживающие стержни (16) на одной стороне припаяны к электрическим контактам (42, 46) электрических соединений (34, 35), а на другой стороне присоединены к электродам (20) возбуждения/обнаружения электрододержателя (8).
11. Гироскопический датчик (2) по п.9, отличающийся тем, что включает в себя корпус (58) для защиты электронной цепи (36), припаянный к основанию (10).
12. Гироскопический датчик (2) по п.11, отличающийся тем, что основание (10) включает в себя интегрированные в нее матрицу штырьков (54), выступающих на внутренней стороне корпуса (58), и матрицу дополнительных штырьков (56), выступающих на наружной стороне корпуса (58), при этом, по меньшей мере, некоторые из вышеуказанных электрических соединений (34, 35) основания (10) способны присоединять матрицу штырьков (54) к матрице дополнительных штырьков (56).
13. Гироскопический датчик (2) по п.12, отличающийся тем, что он выполнен с возможностью закрепления к инерционному стержню (11) и содержит
- защитное кольцо, расположенное на электрододержателе (8); и
- средства (20, 29, 34, 35, 48) электрического соединения для соединения между вышеуказанным защитным кольцом с одной стороны и электронной цепью (36) или вышеуказанным корпусом (58) с другой стороны, или обоими этими компонентами, при этом вышеуказанные средства (20, 29, 34, 35, 48) электрического соединения присоединяются к электрическому земляному контакту инерционного стержня (11).
- защитное кольцо, расположенное на электрододержателе (8); и
- средства (20, 29, 34, 35, 48) электрического соединения для соединения между вышеуказанным защитным кольцом с одной стороны и электронной цепью (36) или вышеуказанным корпусом (58) с другой стороны, или обоими этими компонентами, при этом вышеуказанные средства (20, 29, 34, 35, 48) электрического соединения присоединяются к электрическому земляному контакту инерционного стержня (11).
14. Гироскопический датчик (2) по п.1, отличающийся тем, что вышеуказанный датчик (2 выполнен с возможностью закрепления к инерционному стержню (11), при этом вышеуказанный датчик (2) содержит кожух (12), прикрепляемый к основанию (10), и вышеуказанный кожух (12) присоединяется к электрическому земляному контакту инерционного стержня (11).
15. Гироскопический датчик (2) по п.1, отличающийся тем, что включает в себя по меньшей мере один эластичный электрический соединитель (28, 29) вдоль осевого направления, при этом вышеуказанный соединитель размещается между электрододержателем (8) и основанием (10).
16. Гироскопический датчик (2) по п.1, отличающийся тем, что вышеуказанный датчик (2) выполнен с возможностью закрепления к инерционному стержню (11) через четыре элемента (33) крепления.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0905428 | 2009-11-12 | ||
| FR0905428A FR2952428B1 (fr) | 2009-11-12 | 2009-11-12 | Capteur inertiel |
| US32455210P | 2010-04-15 | 2010-04-15 | |
| US61/324,552 | 2010-04-15 | ||
| PCT/EP2010/067217 WO2011058060A1 (en) | 2009-11-12 | 2010-11-10 | Gyroscopic sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012123939A RU2012123939A (ru) | 2013-12-20 |
| RU2540249C2 true RU2540249C2 (ru) | 2015-02-10 |
Family
ID=42562604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012123939/28A RU2540249C2 (ru) | 2009-11-12 | 2010-11-10 | Гироскопический датчик |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9303995B2 (ru) |
| EP (2) | EP3569978B1 (ru) |
| JP (2) | JP5947722B2 (ru) |
| KR (1) | KR101735579B1 (ru) |
| CN (1) | CN102695941B (ru) |
| FR (1) | FR2952428B1 (ru) |
| RU (1) | RU2540249C2 (ru) |
| WO (1) | WO2011058060A1 (ru) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2936049B1 (fr) * | 2008-09-16 | 2010-09-17 | Sagem Defense Securite | Resonateur a metallisation partielle pour detecteur de parametre angulaire. |
| CN104215235B (zh) * | 2013-06-05 | 2017-08-22 | 北京信息科技大学 | 一种新型钟形振子式角速率陀螺 |
| KR101414391B1 (ko) * | 2013-06-11 | 2014-07-02 | 한국항공우주연구원 | 반구형 공진 자이로 |
| US9551513B2 (en) * | 2014-06-12 | 2017-01-24 | Raytheon Company | Frequency-matched cryocooler scaling for low-cost, minimal disturbance space cooling |
| US10119820B2 (en) * | 2015-02-10 | 2018-11-06 | Northrop Grumman Systems Corporation | Wide rim vibratory resonant sensors |
| CN105509724B (zh) * | 2015-11-30 | 2019-09-24 | 上海新跃仪表厂 | 集成化金属振动陀螺仪 |
| CN106441258B (zh) * | 2016-09-09 | 2019-07-26 | 东南大学 | 微壳体谐振器及其谐振子制备方法 |
| CN105628013B (zh) * | 2016-01-07 | 2018-06-19 | 东南大学 | 一种组装式半球谐振微陀螺仪及其加工工艺 |
| CN105466405B (zh) * | 2016-01-07 | 2018-02-02 | 东南大学 | 一种混合式半球谐振微陀螺仪及其加工工艺 |
| JP2020071074A (ja) | 2018-10-29 | 2020-05-07 | セイコーエプソン株式会社 | センサーユニット、電子機器および移動体 |
| US11428531B1 (en) * | 2021-03-22 | 2022-08-30 | Northrop Grumman Systems Corporation | Diffusion block for an evacuated instrument system |
| CN114396926B (zh) * | 2021-12-01 | 2024-04-23 | 上海航天控制技术研究所 | 一种半球谐振陀螺 |
| CN114396925B (zh) * | 2021-12-01 | 2023-08-04 | 上海航天控制技术研究所 | 一种带有弹簧阻尼结构的半球谐振陀螺 |
| WO2024077035A1 (en) | 2022-10-04 | 2024-04-11 | Enertia Microsystems Inc. | Vibratory gyroscopes with resonator attachments |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4019391A (en) * | 1975-07-25 | 1977-04-26 | The Singer Company | Vibratory gyroscope |
| US4951508A (en) * | 1983-10-31 | 1990-08-28 | General Motors Corporation | Vibratory rotation sensor |
| FR2805039A1 (fr) * | 2000-02-15 | 2001-08-17 | Sagem | Capteur gyroscopique |
| FR2859017B1 (fr) * | 2003-08-19 | 2005-09-30 | Sagem | Capteur de rotation inertiel a element sensible monte directement sur le corps |
| RU2362121C2 (ru) * | 2007-07-09 | 2009-07-20 | Закрытое акционерное общество "Научно-производственное предприятие "Медикон" | Малогабаритный твердотелый волновой гироскоп |
| RU2362975C1 (ru) * | 2008-01-09 | 2009-07-27 | Сергей Михайлович Бражнев | Твердотельный волновой гироскоп |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3680391A (en) * | 1969-10-06 | 1972-08-01 | Gen Motors Corp | Bell gyro and method of making same |
| US4068533A (en) * | 1976-11-30 | 1978-01-17 | The Singer Company | ESG Reflected impedance pickoff |
| CA1250458A (en) * | 1983-10-31 | 1989-02-28 | Edward J. Loper, Jr. | Hemispherical resonator gyro |
| JPH0290551A (ja) * | 1988-09-27 | 1990-03-30 | Matsushita Electric Works Ltd | セラミックパッケージの製法 |
| US5218867A (en) * | 1989-07-29 | 1993-06-15 | British Aerospace Public Limited Company | Single axis attitude sensor |
| JPH06260566A (ja) * | 1993-03-04 | 1994-09-16 | Sony Corp | ランドグリッドアレイパッケージ及びその作製方法、並びに半導体パッケージ |
| US5712427A (en) * | 1995-08-29 | 1998-01-27 | Litton Systems Inc. | Vibratory rotation sensor with scanning-tunneling-transducer readout |
| JP2000074770A (ja) * | 1998-09-03 | 2000-03-14 | Murata Mfg Co Ltd | 減圧パッケージ装置及びその真空度の測定方法 |
| WO2003046479A1 (en) * | 2001-11-29 | 2003-06-05 | Matsushita Electric Industrial Co., Ltd. | Angular velocity sensor |
| FR2851041B1 (fr) * | 2003-02-06 | 2005-03-18 | Sagem | Procede de mise en oeuvre d'un resonateur sous l'effet de forces electrostatiques |
| CN2636198Y (zh) * | 2003-07-14 | 2004-08-25 | 财团法人工业技术研究院 | 膜式微型陀螺仪及具有该陀螺仪的测量装置 |
| JP2005083779A (ja) * | 2003-09-05 | 2005-03-31 | Tdk Corp | 角速度センサ |
| JP2005106584A (ja) | 2003-09-30 | 2005-04-21 | Mitsubishi Electric Corp | 加速度センサユニット |
| US20050238803A1 (en) * | 2003-11-12 | 2005-10-27 | Tremel James D | Method for adhering getter material to a surface for use in electronic devices |
| FI20031796A (fi) * | 2003-12-09 | 2005-06-10 | Asperation Oy | Menetelmä EMI-suojan rakentamiseksi piirilevylle upotettavan komponentin ympärille |
| EP1734338B1 (en) * | 2004-04-07 | 2013-01-02 | Murata Manufacturing Co., Ltd. | Angular speed measuring equipment |
| UA79166C2 (en) * | 2005-05-31 | 2007-05-25 | Yurii Oleksiiovych Yatsenko | Detecting element of a vibratory gyroscope sensitive to coriolis acceleration |
| US7607350B2 (en) | 2005-10-06 | 2009-10-27 | Northrop Grumman Guidance And Electronics Company, Inc. | Circuit board mounting for temperature stress reduction |
| US7281426B1 (en) * | 2006-06-15 | 2007-10-16 | Innalabs Technologies, Inc. | Stemless hemispherical resonator gyroscope |
| JP2008185369A (ja) * | 2007-01-26 | 2008-08-14 | Sony Corp | 角速度センサ、角速度センサの製造方法、電子機器、及び回路基板 |
| JP2008185385A (ja) * | 2007-01-29 | 2008-08-14 | Sony Corp | 角速度センサ及び電子機器 |
| US8109145B2 (en) * | 2007-07-31 | 2012-02-07 | Northrop Grumman Guidance And Electronics Company, Inc. | Micro hemispheric resonator gyro |
| US7839059B2 (en) * | 2007-08-03 | 2010-11-23 | Northrop Grumman Guidance And Electronics Company, Inc. | Inner-forcer milli-hemispherical resonator gyro |
-
2009
- 2009-11-12 FR FR0905428A patent/FR2952428B1/fr not_active Expired - Fee Related
-
2010
- 2010-11-10 EP EP19180116.6A patent/EP3569978B1/en active Active
- 2010-11-10 EP EP10773929.4A patent/EP2499455B1/en active Active
- 2010-11-10 RU RU2012123939/28A patent/RU2540249C2/ru active
- 2010-11-10 JP JP2012538324A patent/JP5947722B2/ja active Active
- 2010-11-10 WO PCT/EP2010/067217 patent/WO2011058060A1/en active Application Filing
- 2010-11-10 CN CN201080056371.1A patent/CN102695941B/zh active Active
- 2010-11-10 KR KR1020127014148A patent/KR101735579B1/ko active IP Right Grant
- 2010-11-10 US US13/509,523 patent/US9303995B2/en active Active
-
2015
- 2015-06-17 JP JP2015122378A patent/JP6254120B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4019391A (en) * | 1975-07-25 | 1977-04-26 | The Singer Company | Vibratory gyroscope |
| US4951508A (en) * | 1983-10-31 | 1990-08-28 | General Motors Corporation | Vibratory rotation sensor |
| FR2805039A1 (fr) * | 2000-02-15 | 2001-08-17 | Sagem | Capteur gyroscopique |
| FR2859017B1 (fr) * | 2003-08-19 | 2005-09-30 | Sagem | Capteur de rotation inertiel a element sensible monte directement sur le corps |
| RU2362121C2 (ru) * | 2007-07-09 | 2009-07-20 | Закрытое акционерное общество "Научно-производственное предприятие "Медикон" | Малогабаритный твердотелый волновой гироскоп |
| RU2362975C1 (ru) * | 2008-01-09 | 2009-07-27 | Сергей Михайлович Бражнев | Твердотельный волновой гироскоп |
Also Published As
| Publication number | Publication date |
|---|---|
| US9303995B2 (en) | 2016-04-05 |
| US20120227497A1 (en) | 2012-09-13 |
| FR2952428A1 (fr) | 2011-05-13 |
| RU2012123939A (ru) | 2013-12-20 |
| EP2499455A1 (en) | 2012-09-19 |
| EP3569978A1 (en) | 2019-11-20 |
| JP5947722B2 (ja) | 2016-07-06 |
| EP3569978B1 (en) | 2021-06-16 |
| CN102695941B (zh) | 2015-11-25 |
| JP2015180893A (ja) | 2015-10-15 |
| EP2499455B1 (en) | 2019-09-25 |
| JP6254120B2 (ja) | 2017-12-27 |
| KR20120094937A (ko) | 2012-08-27 |
| FR2952428B1 (fr) | 2011-12-16 |
| CN102695941A (zh) | 2012-09-26 |
| JP2013511029A (ja) | 2013-03-28 |
| KR101735579B1 (ko) | 2017-05-24 |
| WO2011058060A1 (en) | 2011-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2540249C2 (ru) | Гироскопический датчик | |
| US9448068B2 (en) | Angular velocity sensor | |
| US11162973B2 (en) | Three-axis piezoelectric accelerometer | |
| US6662656B2 (en) | Gyroscopic sensor | |
| US20080282802A1 (en) | Fabrication process and package design for use in a micro-machined seismometer or other device | |
| WO2012067534A1 (ru) | Осесиметричный кориолисовый вибрационный гироскоп (варианты) | |
| JP2643025B2 (ja) | 圧電変換器による加速度の計測装置 | |
| CN102449434A (zh) | 陀螺仪封装组件 | |
| DK169653B1 (da) | Piezoelektrisk accelerometer af forskydningstypen | |
| RU2291450C1 (ru) | Компенсационный маятниковый акселерометр | |
| JP2004506883A (ja) | マイクロメカニカル回転速度センサおよびその製造方法 | |
| JP2021032801A (ja) | 慣性センサーユニット、電子機器、及び移動体 | |
| CN112014588B (zh) | 惯性传感器单元的安装方法以及惯性传感器单元 | |
| WO2002041006A2 (en) | Silicon capacitive accelerometer | |
| Wu et al. | A quadruple mass vibrating MEMS gyroscope with symmetric design | |
| RU30006U1 (ru) | Пьезоэлектрический акселерометр | |
| JP2005321221A (ja) | 圧電振動子 | |
| CN117054683A (zh) | 选择性激光蚀刻石英谐振器 | |
| Sill | Test Results and Alternate Packaging of a Damped Piezoresistive MEMS Accelerometer | |
| JP2006275565A (ja) | 振動計測装置 | |
| CN115342795A (zh) | 惯性传感器以及惯性测量装置 | |
| KR100479934B1 (ko) | 저주파 진동 측정용 가속도 센서 | |
| JPH09222434A (ja) | 角速度センサ | |
| JP2003337016A (ja) | 接触感知器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PD4A | Correction of name of patent owner |