RU2471448C2 - Устройство для позиционирования ультразвукового преобразователя в магнитно-резонансном томографе - Google Patents
Устройство для позиционирования ультразвукового преобразователя в магнитно-резонансном томографе Download PDFInfo
- Publication number
- RU2471448C2 RU2471448C2 RU2008144406/14A RU2008144406A RU2471448C2 RU 2471448 C2 RU2471448 C2 RU 2471448C2 RU 2008144406/14 A RU2008144406/14 A RU 2008144406/14A RU 2008144406 A RU2008144406 A RU 2008144406A RU 2471448 C2 RU2471448 C2 RU 2471448C2
- Authority
- RU
- Russia
- Prior art keywords
- patient
- ultrasound
- freedom
- degrees
- interest
- Prior art date
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/225—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for for extracorporeal shock wave lithotripsy [ESWL], e.g. by using ultrasonic waves
- A61B17/2255—Means for positioning patient, shock wave apparatus or locating means, e.g. mechanical aspects, patient beds, support arms, aiming means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4416—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to combined acquisition of different diagnostic modalities, e.g. combination of ultrasound and X-ray acquisitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
- A61N7/022—Localised ultrasound hyperthermia intracavitary
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00084—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
- A61B2017/00128—Electrical control of surgical instruments with audible or visual output related to intensity or progress of surgical action
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00902—Material properties transparent or translucent
- A61B2017/00911—Material properties transparent or translucent for fields applied by a magnetic resonance imaging system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
Abstract
Изобретение относится к медицинской технике, а именно к устройствам визуализации. Устройство для установки в требуемое положение ультразвукового преобразователя для ультразвуковой терапии при фокусировке обрабатывающего луча содержит три фиксатора ультразвукового преобразователя, три раздвижные конструкции с соединительными элементами и приводное устройство для независимого приведения в движение каждой из раздвижных конструкций по направлению к пациенту или от него для перемещения ультразвукового преобразователя в пределах трех степеней свободы. Компоненты устройства выполнены из немагнитных материалов. Устройство входит в первый вариант выполнения системы для медицинской обработки. Второй вариант системы для медицинской обработки дополнительно включает устройство визуализации интересующего участка пациента в зоне визуализации, опору для пациента. При этом устройство для установки поддерживается посредством опоры для пациента, а устройство визуализации включает компонент обработки информации, который накладывает изображение ультразвукового луча на диагностические изображения. Третий вариант выполнения системы дополнительно содержит приводное устройство установки ультразвукового преобразователя в требуемое положение с обеспечением пяти степеней свободы. Способ установки в требуемое положение ультразвукового луча для обработки целевого участка пациента при помощи сфокусированного ультразвука высокой интенсивности (HIFU) включает первоначальную установку ультразвукового луча с обеспечением пяти степеней свободы, обработку, получение информации, характеризующей ткань на интересующем участке и профиль его температуры, повторную установку ультразвукового луча на основе полученной информации и продолжение обработки. Использование изобретения позволяет облегчить позиционирование ультразвукового преобразователя при минимизации влияния элементов перемещения на магнитное поле внутри пациента. 5 н. и 17 з.п. ф-лы, 12 ил.
Description
Настоящее изобретение относится к медицинским устройствам визуализации. Оно находит конкретное применение для облегчения позиционирования ультразвукового преобразователя в магнитно-резонансном томографе, но может также применяться для других медицинских методов диагностической визуализации.
Сфокусированный ультразвук высокой интенсивности (high intensity focused ultrasound - HIFU) используется для лечения опухолей, особенно фибром матки. Лечение основано на нагревании ткани в фокусе и/или около фокуса ультразвукового луча. Достаточное нагревание вызывает некроз клеток и затем повреждение в обрабатываемом объеме, которое часто включает в себя опухоль и некоторый запас непосредственно прилегающей здоровой ткани. Затем организм человека медленно абсорбирует опухоль, оставляя обработанный участок без опухоли.
Для достижения вышеизложенного ультразвуковой преобразователь должен быть способен перемещаться таким образом, чтобы фокусировать ультразвуковой луч на требуемом участке на пациенте, при этом не подвергая воздействию органы. Для обеспечения необходимого перемещения требуются, по меньшей мере, две линейные степени свободы и две угловые степени свободы. Управление положением и степенью нагрева может быть обеспечено посредством обратной связи от устройства, которое может обеспечить визуализацию как анатомии обрабатываемого участка, так и создаваемого профиля температуры. Магнитно-резонансный томограф может осуществлять обе функции посредством проведения специальных последовательностей операций.
Профиль температуры получается посредством локальных измерений частоты магнитного резонанса протонов в пациенте. Частота имеет температурный коэффициент, который относительно мал и составляет всего одну миллионную часть одного процента на градус Цельсия. Поэтому устройства для перемещения преобразователя выполняются из немагнитных материалов. Могут быть использованы небольшие количества любого металла, однако преимущественно используются пластмасса и/или керамика. Кроме того, электродвигатели для обеспечения перемещений обычно размещаются на расстоянии, равном приблизительно одному метру или более. При этом точность системы соответствует приблизительно 0,5 мм или лучше. Это делает систему критичной к механическому слабому натяжению и сгибанию.
Обычные системы обработки используют устройства для установки, которые фокусируют ультразвук высокой интенсивности на обрабатываемой ткани. Преобразователь обычно поддерживается посредством вилкообразной конструкции, которая вращается вокруг центральной оси. В результате одна сторона преобразователя поднимается, при этом другая сторона преобразователя опускается. Данное вращение вокруг оси при подъеме одной стороны преобразователя во время фокусировки создает проблемы, когда преобразователь должен быть установлен на относительно малом расстоянии от пациента, и такая установка на малом расстоянии часто является критической при обработке пациентов разных размеров с опухолями, расположенными на разных глубинах. Для того чтобы сделать вилку жесткой, перемещение вверх-вниз обычно уменьшается, ограничивая диапазон перемещений.
В соответствии с одним аспектом проиллюстрировано устройство, которое определяет местоположение ультразвукового преобразователя для ультразвуковой терапии для фокусировки обрабатывающего луча, излучаемого ультразвуковым преобразователем, на интересующей ткани. Данное устройство включает в себя, по меньшей мере, три фиксатора, которые поддерживают ультразвуковой преобразователь, и, по меньшей мере, три раздвижные конструкции, каждая из которых содержит соединительный элемент, который поддерживает соответствующий один из, по меньшей мере, трех фиксаторов. Приводное устройство независимо приводит в движение каждую из, по меньшей мере, трех раздвижных конструкций по направлению к пациенту или от пациента для перемещения ультразвукового преобразователя в пределах, по меньшей мере, трех степеней свободы.
Одно преимущество включает облегчение позиционирования ультразвукового преобразователя для обработки сфокусированным ультразвуком высокой интенсивности.
Другим преимуществом является свободное перемещение ультразвукового преобразователя во всех направлениях и независимый наклон в двух направлениях.
Другое преимущество включает элементы перемещения и наклона, имеющие минимальную длину относительно амплитуд перемещений, и данные элементы механически нагружены только в продольных направлениях с целью минимизации степени смещения преобразователя, обусловленного упругой деформацией в его подвеске.
Другим преимуществом являются элементы перемещения и наклона, выполненные с использованием небольшого количества материала с целью минимизации их влияния на магнитное поле внутри пациента и на измерение температуры.
Другим преимуществом является использование медицинской визуализации для облегчения фокусировки луча ультразвукового преобразователя на интересующем участке.
Другие преимущества станут понятными для специалистов в данной области техники после ознакомления с подробным описанием предпочтительных вариантов осуществления.
Чертежи приведены только в целях иллюстрации вариантов осуществления и не должны рассматриваться как ограничивающие формулу изобретения.
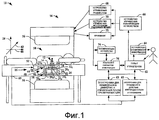
Фиг.1 изображает систему медицинской обработки для обработки участков пациента/объекта при помощи сфокусированного ультразвука высокой интенсивности (high intensity focused ultrasonic - HIFU).
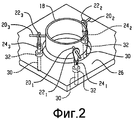
Фиг.2 изображает приемный элемент, используемый для размещения ультразвукового преобразователя в отведенном положении от пациента.
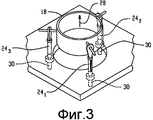
Фиг.3 изображает оборудование, в котором приемный элемент, удерживающий ультразвуковой преобразователь, перемещается для перефокусировки луча HIFU.
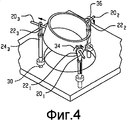
Фиг.4 изображает оборудование, в котором приемный элемент, удерживающий ультразвуковой преобразователь, перемещается и вращается для перефокусировки луча HIFU.
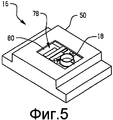
Фиг.5 изображает примерное устройство для перемещения приемного элемента, удерживающего ультразвуковой преобразователь, для обеспечения необходимой фокусировки луча HIFU.
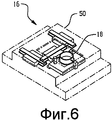
Фиг.6 изображает примерное расположение приемного элемента в устройстве, удерживающем ультразвуковой преобразователь.
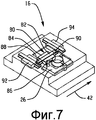
Фиг.7 изображает примерное устройство осевого перемещения для управления осевым положением приемного элемента, удерживающего ультразвуковой преобразователь.
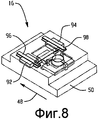
Фиг.8 изображает примерное устройство продольного перемещения для управления продольным расположением приемного элемента, удерживающего ультразвуковой преобразователь.
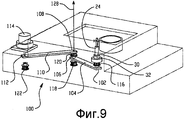
Фиг.9, 10 и 11 изображают примерное устройство рычага и колеса для приведения в движение приемного элемента по направлению к пациенту и от пациента.
Фиг.12 изображает способ установки в требуемое положение ультразвукового преобразователя, используемого для обработки участков пациента/объекта при помощи сфокусированного ультразвука высокой интенсивности (high intensity focused ultrasonic - HIFU).
Фиг.1 изображает систему медицинской обработки 10 для обработки пациента/объекта при помощи сфокусированного ультразвука высокой интенсивности (high intensity focused ultrasonic - HIFU). Луч HIFU 12 используется для обработки интересующего участка в пациенте и/или пациента. Интересующий участок включает в себя нежелательную ткань, такую как опухоль, и некоторый запас здоровой ткани. Луч HIFU 12 генерируется и излучается ультразвуковым преобразователем 14, который соответственным образом располагается для фокусировки луча 12 на интересующем участке 14 при помощи устройства 16, которое перемещает ультразвуковой преобразователь 14 за счет, по меньшей мере, пяти степеней свободы: по меньшей мере, трех степеней свободы в направлении к пациенту и от пациента и, по меньшей мере, двух степеней свободы в осевом и продольном направлениях относительно пациента.
Устройство 16 включает в себя приемный элемент или раму 18, которая поддерживает ультразвуковой преобразователь 14. Приемный элемент 18 включает в себя фиксаторы 201, 202,..., 20N (обобщенно называемые здесь фиксаторами 20), причем N является положительным целым числом. Каждый из фиксаторов 201, 202,..., 20N соответственно поддерживается посредством соединительных элементов 221, 222,..., 22N (обобщенно называемых здесь соединительными элементами 22). Каждый из соединительных элементов 221, 222,..., 22N соответственно расположен на конце раздвижных конструкций 241, 242,..., 24N (обобщенно называемых здесь раздвижными конструкциями 24). Раздвижные конструкции 24 прикреплены с возможностью перемещения к опорной пластине 26 и выдвигаются и отводятся от пациента вдоль первой оси 28. Соединительные элементы 22 позволяют фиксаторам 20 перемещаться поступательно и/или поворачиваться в них, когда одна или более раздвижных конструкций 24 выдвигается или отводится. Когда фиксаторы 20 перемещаются поступательно и/или поворачиваются в соответствующих им соединительных элементах 22, приемный элемент 18 перемещается поступательно и/или поворачивается по направлению к пациенту или от пациента и, следовательно, преобразователь 14 перемещается поступательно и/или поворачивается по направлению к пациенту или от пациента.
В качестве примера фиг.2 изображает приемный элемент 18 в отведенном положении от пациента. В данном примере имеется в наличии три (т.е. N=3) раздвижные конструкции 24: раздвижная конструкция 241, раздвижная конструкция 242 и раздвижная конструкция 243. Раздвижные конструкции 24 соответственно соединены с соединительными элементами 221, 222 и 223. В одном примере соединительными элементами 22 являются сферические шарниры или подобные соединительные элементы, и фиксаторы 201, 202 и 203 проходят через отверстия в сферических шарнирах, и раздвижными конструкциями 24 являются толкающие стержни. Сами по себе раздвижные конструкции 24 (или толкающие стержни) могут быть прикреплены к ходовым винтам 30 и приводятся в движение посредством ходовых винтов 30 и соответствующих гаек 32 ходовых винтов или подобных элементов. Гайки 32 ходовых винтов могут быть закреплены на первой оси 28 и могут вращаться вокруг первой оси 28. Приводные устройства Х (описанные подробно ниже в соответствии с фиг.9, 10 и 11) используются для обеспечения независимого вращения каждой из гаек 32 ходовых винтов, которые независимо приводят в движение каждый ходовой винт 30 и раздвижную конструкцию 24 вдоль первой оси 28. В данном примере фиксаторы 20 расположены с интервалом приблизительно в 60 градусов друг от друга. Однако в других вариантах осуществления могут быть использованы различные другие конфигурации. Например, в одном альтернативном варианте осуществления два фиксатора 20 расположены с интервалом приблизительно в 180 градусов, а третий фиксатор расположен с интервалом приблизительно в 90 градусов от первых двух фиксаторов. Предполагаются также и другие раздвижные конструкции, такие как пневматические или гидравлические цилиндры.
В режиме перемещения, проиллюстрированном на фиг.3, ходовые винты 30 одновременно приводятся в движение с одной и той же скоростью по направлению к пациентам, что приводит в движение раздвижные конструкции 24 в том же направлении (по направлению к пациенту) с той же самой скоростью. В результате, приемный элемент 18 и ультразвуковой преобразователь 14 перемещаются поступательно вдоль первой оси 28 по направлению к пациенту. На фиг.4 только ходовой винт 30, связанный с раздвижной конструкцией 243, приводится в движение по направлению к пациенту. Другие ходовые винты 30 остаются в неподвижном положении. В результате раздвижная конструкция 243 проходит по направлению к пациенту, фиксатор 203 перемещается посредством соединительного элемента 223, и фиксаторы 201 и 202 поворачиваются (и перемещаются на очень малое расстояние) в соответствующих им соединительных элементах 221 и 222 (как проиллюстрировано стрелками 34 и 36), что обеспечивает принудительный поворот и наклон приемного элемента 18 относительно соединительных элементов 221 и 222. Поворот приемного элемента 18, в свою очередь, приводит к повороту ультразвукового преобразователя 14, который перемещает фокус луча HIFU 12.
Как проиллюстрировано на фиг.2, посредством независимого выдвижения и/или отвода одной или более раздвижных конструкций 24 на одинаковые и/или разные расстояния с одинаковыми и/или разными скоростями, можно обеспечить до трех степеней свободы, которые могут быть использованы для осуществления возвратно-поступательного, вращательного или одновременно возвратно-поступательного и вращательного перемещения приемного элемента 18 для обеспечения перемещения ультразвукового преобразователя 14 и фокуса ультразвукового луча 12.
Как проиллюстрировано на фиг.1, опорная пластина 26 также прикреплена к первому концу 38 устройства осевого перемещения 40, которое обеспечивает возвратно-поступательное перемещение опорной пластины 26 вдоль второй поперечной оси 42 в поперечном осевом направлении (поперек) относительно пациента. Второй конец 44 устройства осевого перемещения 40 прикреплен к устройству продольного перемещения 46, которое обеспечивает возвратно-поступательное перемещение опорной пластины 26 вдоль третьей продольной оси 48 в продольном направлении относительно пациента. Комбинация возвратно-поступательных перемещений вдоль осей 28, 42 и 48 и вращательных перемещений 34 и 36 (как проиллюстрировано на фиг.4) обеспечивает до пяти степеней свободы для установки в требуемое положение приемного элемента 18 для соответствующей фокусировки ультразвукового луча 12.
Приемный элемент 18, фиксаторы 20, соединительные элементы 22, раздвижные конструкции 24, опорная пластина 26, устройство осевого перемещения 40 и устройство продольного перемещения 46 расположены в полости контейнера или оболочки 50. Устройства управления 52 используются для управления раздвижными конструкциями 24, устройством осевого перемещения 40 и устройством продольного перемещения 46 для обеспечения фокусировки ультразвукового луча 12. Устройства управления 52 могут включать в себя механические компоненты для ручной фокусировки луча 12 и/или электрические компоненты для электрической фокусировки луча 12.
Устройство 16 используется в сочетании со сканирующим устройством 54 или другим устройством, которое способно обеспечить информацию о ткани и/или профилях температуры, связанных с обрабатываемым участком. Такая информация используется для установки в требуемое положение приемного элемента 18 для фокусировки ультразвукового луча 12. Как проиллюстрировано на фиг.1, сканирующим устройством 54 может быть магнитно-резонансный томограф (MR). Однако необходимо понимать, что здесь предполагаются также и другие типы магнитно-резонансных томографов и/или других технических средств визуализации.
В данном примере сканирующее устройство 54 включает в себя два основных магнита 56 (например, постоянных или резистивных), разделенных зоной визуализации 58 в открытой конфигурации. Опорное устройство 60 используется для размещения пациента в зоне визуализации 58. Как проиллюстрировано, устройство 16 расположено в опорном устройстве 60. Два основных магнита 56 расположены таким образом, что магниты создают магнитное поле (В0) в пациенте. Катушки градиента магнитного поля (не проиллюстрированы, обычно расположены в основных магнитах или рядом с основными магнитами) выполнены с возможностью наложения выбранных градиентов магнитного поля на В0. Такие градиенты включают в себя ортогональные градиенты магнитного поля, такие как градиенты х, y и/или z, определяемые в плоскости прямоугольной системы координат. Одна или более высокочастотных катушек индуктивности (не проиллюстрированы, обычно расположены между катушками градиента и пациентом) вводят высокочастотные возбуждающие импульсы (В1) в зону визуализации 58 и/или принимают резонансные сигналы из зоны визуализации 58.
Пульт управления 62 и устройство отображения информации 64 используются для планирования процедур для пациента (например, выбор протокола (протоколов) отображения, определение параметров отображения и др.), начала сканирования, представления воспроизведенных изображений, а также различных других особенностей. Пульт управления 62 обеспечивает инструкции для устройства управления 66 сканирующим устройством, которое управляет устройством управления градиентом 68, источником 70 радиоизлучения (RF) и приемником 72. Устройство управления градиентом 68 управляет катушками градиента магнитного поля для пространственного кодирования результирующих магнитных резонансов. Источник радиоизлучения 70 генерирует и обеспечивает высокочастотные возбуждающие импульсы (В1) для одной или более высокочастотных катушек индуктивности. Во время этапа считывания схема регистрации (не проиллюстрирована) регистрирует сигналы магнитного резонанса, и приемник 72 принимает пространственно кодированные магнитные резонансы. Полученные пространственно кодированные магнитные резонансы сохраняются в запоминающем устройстве 74 и/или передаются в компонент обработки 76, который воспроизводит одно или более изображений из данных. Необработанные и/или обработанные данные (т.е. изображения) отображаются в устройстве отображения информации 64, архивируются, записываются на пленку, передаются для дальнейшей обработки и т.д.
Полученные данные и/или результирующие изображения используются для фокусировки луча 12 на интересующем участке, который по выбору управляется с пульта управления 62 посредством электроники 63 приведения в движение и управления лучом преобразователя и/или электроники 65 приведения в действие и управления электродвигателем. Например, данные и/или изображения обеспечивают цифровую и/или графическую информацию об интересующем участке, такую как изображения обрабатываемой ткани и профили температуры, связанные с ней. Таким образом, данные позволяют оператору видеть участок, который подвергается воздействию луча 12. Затем оператор может при необходимости использовать пульт управления 62 для управления электроникой 63 и/или 65 для приведения в действие устройств управления 52 для переустановки приемного элемента 18 посредством одной или более из описанных здесь пяти степеней свободы для обеспечения перемещения преобразователя 14 и уточнения положения фокуса луча 12. В одном варианте осуществления ультразвуковой луч и/или его фокальная точка накладываются на индицируемое изображение, т.е. в модели при помощи изменения цвета или сдвига, или подобного элемента. Это обеспечивает оператору визуальную обратную связь, когда преобразователь установлен. Например, наложенные изображения могут гарантировать, что фокальная точка центрирована на целевой опухоли и что жизненно важные или чувствительные органы не находятся в ультразвуковом луче.
На фиг.5 проиллюстрирована примерная конфигурация устройства 16. Устройство 16 включает в себя контейнер 50 с полостью 78, в которой расположены приемный элемент 18 и соединенные опорные и перемещающие элементы. Полость 78 заполнена веществом (например, водой), которое по существу не ослабляет луч 12. Контейнер 50 включает в себя окно 80, являющееся прозрачным для ультразвука, через которое направляется луч 12. Окно 80 проиллюстрировано как имеющее прямоугольную форму; однако необходимо понимать, что окно 80 может иметь разные конфигурации. Например, в качестве альтернативы окно 80 может быть квадратным, круглым, треугольным, неправильной формы и др. формы. Контейнер 50 может быть просто установлен в опоре 60 для пациента и/или закреплен в ней посредством винтов, крепежных элементов, зажимов VelcroTM и подобных элементов. На фиг.6 контейнер 50 проиллюстрирован как полупрозрачный, чтобы выделить положение приемного элемента 18 и связанных с ним опорных и перемещающих элементов в контейнере 50.
Фиг.7 и 8 изображают примерные устройства поперечного и продольного перемещения 40 и 46 соответственно. На фиг.7 выделено устройство осевого перемещения 40, которое включает в себя направляющую 82 и каретку 84. Опора 26 (и, следовательно, преобразователь 14) соединена со стороной 86 каретки 84 и перемещается при помощи каретки 84 вдоль оси 42. Направляющая 82 прикреплена на концах 88 и 90 к первой каретке 92 и второй каретке 94 устройства продольного перемещения 46. Первая и вторая каретки 92 и 94 более наглядно проиллюстрированы на фиг.8. На фиг.8 первая каретка 92 прикреплена с возможностью скольжения к направляющей 96, которая прикреплена к контейнеру 50, и вторая каретка 94 прикреплена с возможностью скольжения к направляющей 98, которая также прикреплена к контейнеру 50. Обе направляющие 96 и 98 обычно жестко прикреплены к контейнеру 50. Как было указано выше, первая и вторая каретки 92 и 94 соответственно прикреплены к направляющей 82, и направляющая 82 перемещается при помощи первой и второй кареток 92 и 94 вдоль направляющих 96 и 98. Для обеспечения поперечного и продольного перемещения вдоль осей 42 и 48 используются различные приводные элементы, такие как механизм реечной передачи, ремень, ходовой винт и подобные элементы.
Фиг.9, 10 и 11 изображают примерное устройство 100, которое может быть использовано для приведения в движение раздвижных конструкций 24. Как описано выше в соответствии с фиг.2, каждая раздвижная конструкция 24 может выдвигаться и/или отводиться посредством узла ходового винта, который включает в себя ходовой винт 30 и гайку 32 ходового винта. Гайка 32 закреплена и может вращаться вокруг первой оси 28 на первом конце 102 первого рычага 104. Второй конец 106 первого рычага 104 соединен с первым концом 108 второго рычага 110, и второй конец 112 второго рычага 110 соединен с устройством управления 114. Шестерни или колеса 116, 118, 120 и 122 соединены с каждым из концов 102, 106, 108 и 112.
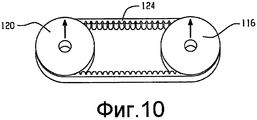
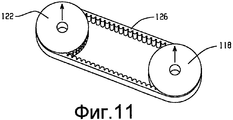
Как проиллюстрировано на фиг.10 и 11, ремень 124 используется в сочетании с колесами 116 и 120, и ремень 126 используется в сочетании с колесами 118 и 122. Ремни 124 и 126 прикреплены таким образом, что вращение колеса 116 преобразуется в соответствующее вращение колеса 120 (и наоборот), и вращение колеса 118 преобразуется в соответствующее вращение колеса 122 (и наоборот). Ремни 124 и 126 могут быть с зубцами (как проиллюстрировано), гладкими и др. и выполненными из различных немагнитных материалов, включая Kevlar(TM), резину, Nylon(TM) и др. Передача вращения от колеса к колесу зависит от таких факторов, как диаметр каждого колеса, проскальзывание ремней, сцепление зубьев, гистерезис и др. В альтернативном варианте осуществления может быть использован механизм реечной передачи.
Как показано на фиг.9, первый и второй рычаги 104 и 110 соединены друг с другом на одной оси 128. При такой конфигурации перемещение опоры 26 и, следовательно, ультразвукового преобразователя 14 вдоль одной или обеих осей 42 и 48 может прослеживаться в плоскости колес 116-122 (в пределах досягаемости рычагов), поддерживая при этом измеряемый угол колес 116-122. Использование колес такого же размера с непроскальзывающими ремнями обеспечивает абсолютный угол, который подлежит измерению. Устройство управления 114 поворачивает колесо 122, которое вращает ремень 124 рычага 110, который, в свою очередь, заставляет вращаться колесо 120. Колеса 120 и 118 соединены таким образом, что вращение одного из колес вызывает вращение другого колеса. Вращение колеса 118 вращает ремень 126 рычага 104, который, в свою очередь, заставляет вращаться колесо 116. Вращение колеса 116 вращает гайку 32 ходового винта, которая приводит в движение ходовой винт 30 и раздвижную конструкцию 24 вдоль оси 28 по направлению к пациенту или от пациента. Хотя на фиг.9 изображен только один узел, состоящий из рычага, колеса и ремня, подобные узлы могут быть использованы для управления каждой из других раздвижных конструкций 24.
Необходимо понимать, что компоненты устройства 26 могут быть выполнены для использования внутри магнитно-резонансного медицинского томографа или томографа другого типа. Кроме того, компоненты могут быть выполнены или просто изготовлены из доступных немагнитных материалов.
Фиг.12 изображает способ установки в требуемое положение ультразвукового преобразователя, используемого для обработки участков пациента/объекта при помощи сфокусированного ультразвука высокой интенсивности (HIFU). Способ включает использование устройства (например, устройства 16), которое обеспечивает, по меньшей мере, три степени свободы для перемещения ультразвукового преобразователя (например, преобразователя 14) по направлению к пациенту или от пациента посредством возвратно-поступательного и/или вращательного перемещений в сочетании с медицинским устройством визуализации (например, магнитно-резонансным томографом 54). Данное устройство также обеспечивает, по меньшей мере, две степени свободы для перемещения ультразвукового преобразователя в осевом и продольном направлениях относительно пациента.
На этапе, обозначенном ссылочным номером 130, устройство 16 устанавливает ультразвуковой преобразователь 14 в исходное положение для обработки конкретного участка в пациенте. Ультразвуковой преобразователь 14 приводится в действие, и ультразвуковой луч 12 направляется на пациента. На этапе 132 устройство визуализации 54 используется для сбора данных, характеризующих ткань на обрабатываемом участке и профиль температуры на обрабатываемом участке. По желанию профили температуры накладываются на индицируемое изображение, например, посредством затенения в зависимости от температуры. На этапе 134 оператор на основе полученных данных определяет, требуется ли уточнение положения ультразвукового преобразователя для дополнительной фокусировки луча на обрабатываемом участке. Если предположить, что оператор желает уточнить положение ультразвукового преобразователя, то на этапе 136 оператор использует устройства управления 52 для выдвижения или отвода одной или более раздвижных конструкций 24, как описано выше, например, посредством устройства 100, состоящего из рычага и колеса. Такое перемещение обеспечивает возвратно-поступательное и/или вращательное перемещение луча для смещения глубины фокуса луча. По желанию оператор использует устройства управления 52 для перемещения опоры 26 в поперечном и/или продольном направлении относительно пациента для изменения положения луча в поперечном и/или продольном направлении.
Настоящее изобретение описано со ссылкой на предпочтительные варианты осуществления. После ознакомления с приведенным выше подробным описанием могут быть выполнены модификации и изменения. Предполагается, что настоящее изобретение включает в себя все такие модификации и изменения, если они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
Claims (22)
1. Устройство (16) для установки в требуемое положение ультразвукового преобразователя (14) для ультразвуковой терапии для фокусировки обрабатывающего луча (12), излучаемого ультразвуковым преобразователем (14), на интересующей ткани, содержащее:
по меньшей мере, три фиксатора (20), которые поддерживают ультразвуковой преобразователь (14);
по меньшей мере, три раздвижные конструкции (24), каждая с соединительным элементом (22), который поддерживает соответствующий один из, по меньшей мере, трех фиксаторов (20); и
приводное устройство (100), которое независимо приводит в движение каждую из, по меньшей мере, трех раздвижных конструкций (24) по направлению к пациенту или от пациента для обеспечения перемещения ультразвукового преобразователя (14) в пределах, по меньшей мере, трех степеней свободы;
при этом компоненты устройства выполнены из немагнитных материалов.
по меньшей мере, три фиксатора (20), которые поддерживают ультразвуковой преобразователь (14);
по меньшей мере, три раздвижные конструкции (24), каждая с соединительным элементом (22), который поддерживает соответствующий один из, по меньшей мере, трех фиксаторов (20); и
приводное устройство (100), которое независимо приводит в движение каждую из, по меньшей мере, трех раздвижных конструкций (24) по направлению к пациенту или от пациента для обеспечения перемещения ультразвукового преобразователя (14) в пределах, по меньшей мере, трех степеней свободы;
при этом компоненты устройства выполнены из немагнитных материалов.
2. Устройство (16) по п.1, в котором обрабатывающим лучом (12) является луч сфокусированного ультразвука высокой интенсивности (high intensity focused ultrasonic - HIFU).
3. Устройство по п.1, в котором, по меньшей мере, три фиксатора (20) расположены с интервалом в 60° в плоскости или два из, по меньшей мере, трех фиксаторов (20) расположены с интервалом в 180° друг от друга, а третий из, по меньшей мере, трех фиксаторов (20) расположен с интервалом в 90° от каждого из двух из, по меньшей мере, трех фиксаторов (20), расположенных с интервалом в 180° друг от друга.
4. Устройство (16) по п.1, в котором, по меньшей мере, три степени свободы включают в себя возвратно-поступательное перемещение по направлению к пациенту и от пациента и два вращательных перемещения.
5. Устройство (16) по п.1, в котором соединительные элементы (22) включают в себя сферические шарниры.
6. Устройство (16) по п.1, в котором, по меньшей мере, три фиксатора (20) перемещаются поступательно и/или вращаются в пределах соответствующих им соединительных элементов (22).
7. Устройство (16) по п.1, в котором приводное устройство (100) включает в себя:
ходовой винт (30), соединенный с каждой из раздвижных конструкций (24); и
гайку (32) ходового винта, вращение которой вызывает выдвижение или отвод ходового винта (30) для выдвижения или отвода соединенной раздвижной конструкции (24) по направлению к пациенту или от пациента.
ходовой винт (30), соединенный с каждой из раздвижных конструкций (24); и
гайку (32) ходового винта, вращение которой вызывает выдвижение или отвод ходового винта (30) для выдвижения или отвода соединенной раздвижной конструкции (24) по направлению к пациенту или от пациента.
8. Устройство (16) по п.7, в котором каждая гайка (32) ходового винта вращается вокруг оси (28), которая проходит через пациента.
9. Устройство (16) по п.7, в котором каждая гайка (32) ходового винта вращается посредством устройств (104, 110, 116, 118, 120, 122), состоящих из рычага и колеса.
10. Устройство (16) по п.1, содержащее также опорную пластину (26), на которой установлены, по меньшей мере, три раздвижные конструкции (24).
11. Устройство (16) по п.10, содержащее также устройство перемещения (40, 46), соединенное с опорной пластиной (26), причем устройство перемещения (40) перемещает опорную пластину (26) и ультразвуковой луч (12), по меньшей мере, вдоль одной оси (42, 48) относительно пациента.
12. Устройство (16) по п.11, в котором устройство перемещения (40, 46) включает в себя:
направляющую (82); и
каретку (84), прикрепленную с возможностью скольжения к направляющей (82), в котором каретка (84) соединена с опорой (26), и опора (26) перемещается при помощи каретки (84) вдоль направляющей (82).
направляющую (82); и
каретку (84), прикрепленную с возможностью скольжения к направляющей (82), в котором каретка (84) соединена с опорой (26), и опора (26) перемещается при помощи каретки (84) вдоль направляющей (82).
13. Устройство (16) по п.12, в котором устройство перемещения (40, 46) включает в себя:
устройство продольного перемещения (46) и устройство поперечного перемещения (40), которые обеспечивают две степени свободы перемещения таким образом, что ультразвуковой преобразователь (14) может перемещаться с 5 степенями свободы для обеспечения фокусировки луча 12.
устройство продольного перемещения (46) и устройство поперечного перемещения (40), которые обеспечивают две степени свободы перемещения таким образом, что ультразвуковой преобразователь (14) может перемещаться с 5 степенями свободы для обеспечения фокусировки луча 12.
14. Система (10) для медицинской обработки, которая использует устройство (16) по п.1 для фокусировки обрабатывающего луча (12) на целевой ткани.
15. Устройство по п.1, в котором приводное устройство (100) также перемещает преобразователь (14) с обеспечением, по меньшей мере, двух степеней свободы перемещения, так что преобразователь устанавливается в требуемое положение с пятью степенями свободы.
16. Устройство по п.1, которое дополнительно содержит устройство визуализации (54), которое включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
17. Система для медицинской обработки, включающая в себя:
устройство визуализации (54) для получения изображения интересующего участка пациента в зоне визуализации (58);
опору (60) для пациента для опоры интересующего участка в исследуемой зоне; и
устройство для установки (16) по п.1, поддерживаемое посредством опоры (60) для пациента, для установки ультразвукового преобразователя (14) для обеспечения фокусировки обрабатывающего луча (12) на целевой ткани в интересующем участке, при этом устройство визуализации (54) включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
устройство визуализации (54) для получения изображения интересующего участка пациента в зоне визуализации (58);
опору (60) для пациента для опоры интересующего участка в исследуемой зоне; и
устройство для установки (16) по п.1, поддерживаемое посредством опоры (60) для пациента, для установки ультразвукового преобразователя (14) для обеспечения фокусировки обрабатывающего луча (12) на целевой ткани в интересующем участке, при этом устройство визуализации (54) включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
18. Система (10) для медицинской обработки, содержащая:
медицинское устройство визуализации (54) для формирования диагностических изображений интересующего участка пациента в зоне визуализации (58);
опору (60) для пациента для обеспечения опоры пациента с интересующим участком в зоне визуализации;
ультразвуковой преобразователь (14), который излучает луч (12) сфокусированного ультразвука для обработки выбранной целевой ткани в интересующем участке; и
приводное устройство (100), которое устанавливает ультразвуковой преобразователь в требуемое положение с обеспечением пяти степеней свободы,
при этом устройство визуализации (54) включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
медицинское устройство визуализации (54) для формирования диагностических изображений интересующего участка пациента в зоне визуализации (58);
опору (60) для пациента для обеспечения опоры пациента с интересующим участком в зоне визуализации;
ультразвуковой преобразователь (14), который излучает луч (12) сфокусированного ультразвука для обработки выбранной целевой ткани в интересующем участке; и
приводное устройство (100), которое устанавливает ультразвуковой преобразователь в требуемое положение с обеспечением пяти степеней свободы,
при этом устройство визуализации (54) включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
19. Система (10) для медицинской обработки по п.18, в которой медицинское устройство визуализации (54) включает в себя:
основные магниты (56), которые создают магнитное поле (B0) в пациенте, находящемся в зоне визуализации (58) сканирующего устройства (54);
катушки градиента магнитного поля, которые накладывают выбранные градиенты магнитного поля на B0, при этом катушки градиента магнитного поля управляются посредством устройства управления градиентом (68);
одну или более высокочастотных катушек индуктивности, которые вводят импульсы высокочастотного возбуждения (B1), создаваемые источником (70) радиоизлучения (RF), в зону визуализации (58);
приемник (72), который принимает магнитные резонансы с пространственным кодированием; пульт управления (62) и устройство отображения информации (64) для управления сканирующим устройством (54); и
устройство отображения информации (64), на котором отображаются диагностические изображения.
основные магниты (56), которые создают магнитное поле (B0) в пациенте, находящемся в зоне визуализации (58) сканирующего устройства (54);
катушки градиента магнитного поля, которые накладывают выбранные градиенты магнитного поля на B0, при этом катушки градиента магнитного поля управляются посредством устройства управления градиентом (68);
одну или более высокочастотных катушек индуктивности, которые вводят импульсы высокочастотного возбуждения (B1), создаваемые источником (70) радиоизлучения (RF), в зону визуализации (58);
приемник (72), который принимает магнитные резонансы с пространственным кодированием; пульт управления (62) и устройство отображения информации (64) для управления сканирующим устройством (54); и
устройство отображения информации (64), на котором отображаются диагностические изображения.
20. Система (10) для медицинской обработки по п.18, в которой приводное устройство включает в себя:
по меньшей мере, три фиксатора (20), поддерживающие ультразвуковой преобразователь (14);
раздвижные конструкции (24) с соединительным элементом (22) для каждого из, по меньшей мере, трех фиксаторов (20); и
приводные устройства (100), независимо приводящие в движение каждую раздвижную конструкцию (24) по направлению к пациенту или от пациента для обеспечения перемещения ультразвукового преобразователя (14) по направлению к пациенту и от пациента с тремя степенями свободы.
по меньшей мере, три фиксатора (20), поддерживающие ультразвуковой преобразователь (14);
раздвижные конструкции (24) с соединительным элементом (22) для каждого из, по меньшей мере, трех фиксаторов (20); и
приводные устройства (100), независимо приводящие в движение каждую раздвижную конструкцию (24) по направлению к пациенту или от пациента для обеспечения перемещения ультразвукового преобразователя (14) по направлению к пациенту и от пациента с тремя степенями свободы.
21. Способ установки в требуемое положение ультразвукового луча (12), используемого для обработки целевого участка пациента при помощи сфокусированного ультразвука высокой интенсивности (HIFU), включающий:
первоначальную установку ультразвукового луча (12), используемого для обработки целевого участка пациента, с обеспечением, по меньшей мере, пяти степеней свободы;
начало обработки;
получение информации, характеризующей ткань на интересующем участке, который включает в себя целевой участок, и профиль температуры интересующего участка;
повторную установку ультразвукового луча (12) на основе полученной информации; и
продолжение обработки;
при этом устройство визуализации (54) включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
первоначальную установку ультразвукового луча (12), используемого для обработки целевого участка пациента, с обеспечением, по меньшей мере, пяти степеней свободы;
начало обработки;
получение информации, характеризующей ткань на интересующем участке, который включает в себя целевой участок, и профиль температуры интересующего участка;
повторную установку ультразвукового луча (12) на основе полученной информации; и
продолжение обработки;
при этом устройство визуализации (54) включает в себя компонент обработки информации (76), который накладывает изображение ультразвукового луча (12) на диагностические изображения.
22. Способ по п.21 для установки ультразвукового луча (12) в требуемое положение включает в себя:
возвратно-поступательное перемещение ультразвукового преобразователя (14) с обеспечением двух степеней свободы; и
перемещение преобразователя (14) по направлению к интересующему участку и от интересующего участка с обеспечением трех степеней свободы.
возвратно-поступательное перемещение ультразвукового преобразователя (14) с обеспечением двух степеней свободы; и
перемещение преобразователя (14) по направлению к интересующему участку и от интересующего участка с обеспечением трех степеней свободы.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US74460506P | 2006-04-11 | 2006-04-11 | |
| US60/744,605 | 2006-04-11 | ||
| PCT/US2007/064184 WO2008048708A2 (en) | 2006-04-11 | 2007-03-16 | A device for positioning an ultrasound transducer inside a mr scanner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2008144406A RU2008144406A (ru) | 2010-05-20 |
| RU2471448C2 true RU2471448C2 (ru) | 2013-01-10 |
Family
ID=39314698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2008144406/14A RU2471448C2 (ru) | 2006-04-11 | 2007-03-16 | Устройство для позиционирования ультразвукового преобразователя в магнитно-резонансном томографе |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US9526515B2 (ru) |
| EP (1) | EP2007305B1 (ru) |
| JP (1) | JP5081227B2 (ru) |
| CN (1) | CN101484084B (ru) |
| RU (1) | RU2471448C2 (ru) |
| WO (1) | WO2008048708A2 (ru) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100574829C (zh) * | 2006-08-24 | 2009-12-30 | 重庆融海超声医学工程研究中心有限公司 | 一种影像设备引导的高强度聚焦超声治疗系统 |
| RU2518528C2 (ru) * | 2008-09-09 | 2014-06-10 | Конинклейке Филипс Электроникс Н.В. | Терапевтическая система для выделения энергии |
| WO2010057067A2 (en) * | 2008-11-17 | 2010-05-20 | Sunnybrook Health Sciences Centre | Focused ultrasound system |
| JP5654580B2 (ja) * | 2009-06-02 | 2015-01-14 | コーニンクレッカ フィリップス エヌ ヴェ | Mrイメージングガイド治療 |
| EP2480286B1 (en) | 2009-09-24 | 2014-01-08 | Koninklijke Philips N.V. | High intensity focused ultrasound positioning mechanism |
| EP2386248B1 (en) | 2010-05-14 | 2018-06-27 | Samsung Medison Co., Ltd. | Ultrasonic diagnostic apparatus |
| KR20140039418A (ko) * | 2012-09-21 | 2014-04-02 | 삼성전자주식회사 | 의료용 로봇 시스템 |
| JP6560338B2 (ja) * | 2014-08-15 | 2019-08-14 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 可変入口ガイド構成を有する外科用システム |
| EP3090695A4 (en) * | 2015-03-06 | 2017-11-22 | Murakumo Corporation | Ultrasonic oscillation device |
| US11551028B2 (en) | 2017-04-04 | 2023-01-10 | Hailo Technologies Ltd. | Structured weight based sparsity in an artificial neural network |
| US11615297B2 (en) | 2017-04-04 | 2023-03-28 | Hailo Technologies Ltd. | Structured weight based sparsity in an artificial neural network compiler |
| US10387298B2 (en) | 2017-04-04 | 2019-08-20 | Hailo Technologies Ltd | Artificial neural network incorporating emphasis and focus techniques |
| US11238334B2 (en) | 2017-04-04 | 2022-02-01 | Hailo Technologies Ltd. | System and method of input alignment for efficient vector operations in an artificial neural network |
| US11544545B2 (en) | 2017-04-04 | 2023-01-03 | Hailo Technologies Ltd. | Structured activation based sparsity in an artificial neural network |
| EP3793683A4 (en) * | 2018-05-16 | 2022-01-26 | Profound Medical Inc. | DEVICE AND METHOD FOR DIRECTING ENERGY FROM A MULTI-ELEMENT SOURCE |
| CN110179527B (zh) * | 2019-05-17 | 2021-11-16 | 鑫高益医疗设备股份有限公司 | 一种核磁共振超声刀控制装置以及核磁共振医疗床 |
| CN113633899B (zh) * | 2021-08-04 | 2023-12-08 | 四川泰猷科技有限公司 | 连续变焦低强度聚焦超声换能器 |
| EP4226874A1 (en) * | 2022-02-09 | 2023-08-16 | Storz Medical AG | Ultrasound and/or shock wave device with hexapod platform mounted source |
| EP4226877A1 (en) * | 2022-02-09 | 2023-08-16 | Storz Medical AG | Shock wave device with integrated ultrasound probe |
| EP4226875A1 (en) * | 2022-02-09 | 2023-08-16 | Storz Medical AG | Shock wave device having a source self aligning with an x-ray device |
| EP4226876A1 (en) * | 2022-02-09 | 2023-08-16 | Storz Medical AG | Shock wave device having improved acoustic coupling |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5443068A (en) * | 1994-09-26 | 1995-08-22 | General Electric Company | Mechanical positioner for magnetic resonance guided ultrasound therapy |
| US6330837B1 (en) * | 1997-08-28 | 2001-12-18 | Microdexterity Systems, Inc. | Parallel mechanism |
| RU2210409C2 (ru) * | 1998-01-25 | 2003-08-20 | Чун Цин Хифу Текнолоджи Ко., Лтд. | Система фокусированного воздействия ультразвуком высокой интенсивности для сканирования и лечения опухолей |
| RU2003101108A (ru) * | 2000-07-17 | 2004-07-20 | Ультразоникс ДНТ АБ | Устройство для неинвазивного ультразвукового лечения болезни диска |
| US20050107702A1 (en) * | 2001-11-05 | 2005-05-19 | Shenxu He | External high-power focusing ultrasonic treatment |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4356577A (en) * | 1980-03-31 | 1982-11-02 | Taylor Gene E | Multipositional medical bed |
| US4435116A (en) * | 1982-05-27 | 1984-03-06 | Deberg Walter H | Robotic manipulator |
| US4567780A (en) * | 1984-03-12 | 1986-02-04 | American Hospital Supply Corporation | Hand-held pipette with disposable capillary |
| JPS62159869A (ja) | 1985-12-30 | 1987-07-15 | Yamatake Honeywell Co Ltd | 低騒音弁 |
| EP0265742A1 (de) | 1986-10-23 | 1988-05-04 | Siemens Aktiengesellschaft | Lithotripter mit Ortungsvorrichtung |
| US4957099A (en) * | 1988-02-10 | 1990-09-18 | Siemens Aktiengesellschaft | Shock wave source for extracorporeal lithotripsy |
| US4951653A (en) | 1988-03-02 | 1990-08-28 | Laboratory Equipment, Corp. | Ultrasound brain lesioning system |
| US5626595A (en) * | 1992-02-14 | 1997-05-06 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| US5275165A (en) * | 1992-11-06 | 1994-01-04 | General Electric Company | Magnetic resonance guided ultrasound therapy system with inclined track to move transducers in a small vertical space |
| US5553618A (en) * | 1993-03-12 | 1996-09-10 | Kabushiki Kaisha Toshiba | Method and apparatus for ultrasound medical treatment |
| US5492122A (en) * | 1994-04-15 | 1996-02-20 | Northrop Grumman Corporation | Magnetic resonance guided hyperthermia |
| US5740699A (en) * | 1995-04-06 | 1998-04-21 | Spar Aerospace Limited | Wrist joint which is longitudinally extendible |
| US20030195410A1 (en) * | 1995-08-10 | 2003-10-16 | James Winter | Method of treatment using magnetic resonance and apparatus therefor |
| US5999839A (en) * | 1998-01-30 | 1999-12-07 | General Electric Company | Arterial MRI with chemical-shift nulling |
| US6675037B1 (en) * | 1999-09-29 | 2004-01-06 | Regents Of The University Of Minnesota | MRI-guided interventional mammary procedures |
| SE518763C2 (sv) * | 2000-07-17 | 2002-11-19 | Ultrazonix Dnt Ab | Anordning för icke-invasiv ultraljudsbehandling av disksjukdom |
| US6506171B1 (en) * | 2000-07-27 | 2003-01-14 | Insightec-Txsonics, Ltd | System and methods for controlling distribution of acoustic energy around a focal point using a focused ultrasound system |
| US6582381B1 (en) * | 2000-07-31 | 2003-06-24 | Txsonics Ltd. | Mechanical positioner for MRI guided ultrasound therapy system |
| JP2002360600A (ja) | 2001-06-11 | 2002-12-17 | Toshiba Corp | 超音波治療装置 |
| US7000911B2 (en) * | 2001-06-22 | 2006-02-21 | Delaware Capital Formation, Inc. | Motor pack for automated machinery |
| US7128711B2 (en) * | 2002-03-25 | 2006-10-31 | Insightec, Ltd. | Positioning systems and methods for guided ultrasound therapy systems |
| FR2869547B1 (fr) | 2004-04-29 | 2007-03-30 | Centre Nat Rech Scient Cnrse | Dispositif de positionnement de moyens generateurs d'energie d'un ensemble pour le traitement thermique de tissus biologiques |
-
2007
- 2007-03-16 WO PCT/US2007/064184 patent/WO2008048708A2/en active Application Filing
- 2007-03-16 CN CN2007800128408A patent/CN101484084B/zh active Active
- 2007-03-16 RU RU2008144406/14A patent/RU2471448C2/ru active
- 2007-03-16 EP EP07863334A patent/EP2007305B1/en active Active
- 2007-03-16 US US12/296,769 patent/US9526515B2/en active Active
- 2007-03-16 JP JP2009505527A patent/JP5081227B2/ja active Active
-
2016
- 2016-12-02 US US15/367,508 patent/US20170079673A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5443068A (en) * | 1994-09-26 | 1995-08-22 | General Electric Company | Mechanical positioner for magnetic resonance guided ultrasound therapy |
| US6330837B1 (en) * | 1997-08-28 | 2001-12-18 | Microdexterity Systems, Inc. | Parallel mechanism |
| RU2210409C2 (ru) * | 1998-01-25 | 2003-08-20 | Чун Цин Хифу Текнолоджи Ко., Лтд. | Система фокусированного воздействия ультразвуком высокой интенсивности для сканирования и лечения опухолей |
| RU2003101108A (ru) * | 2000-07-17 | 2004-07-20 | Ультразоникс ДНТ АБ | Устройство для неинвазивного ультразвукового лечения болезни диска |
| US20050107702A1 (en) * | 2001-11-05 | 2005-05-19 | Shenxu He | External high-power focusing ultrasonic treatment |
Non-Patent Citations (1)
| Title |
|---|
| Система "ExAblate", компания InSightec*, зарегистрировано FDA US 22.10.2004, www.fda.gov/bbs/topics/ANSWERS/2004/ANS01319.html, найдено в Интернет 17.07.2008. * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2008048708A9 (en) | 2008-07-10 |
| EP2007305B1 (en) | 2012-05-16 |
| WO2008048708A3 (en) | 2008-11-27 |
| US9526515B2 (en) | 2016-12-27 |
| JP5081227B2 (ja) | 2012-11-28 |
| JP2009533162A (ja) | 2009-09-17 |
| WO2008048708A2 (en) | 2008-04-24 |
| CN101484084A (zh) | 2009-07-15 |
| CN101484084B (zh) | 2012-08-29 |
| US20090069667A1 (en) | 2009-03-12 |
| RU2008144406A (ru) | 2010-05-20 |
| EP2007305A2 (en) | 2008-12-31 |
| US20170079673A1 (en) | 2017-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2471448C2 (ru) | Устройство для позиционирования ультразвукового преобразователя в магнитно-резонансном томографе | |
| CN100425199C (zh) | 永磁磁共振图像导引体外高能聚焦超声系统和方法 | |
| US8655430B2 (en) | Positioning system for thermal therapy | |
| US6185445B1 (en) | MR tomograph comprising a positioning system for the exact determination of the position of a manually guided manipulator | |
| JP3440113B2 (ja) | 器具内の試料の磁気共鳴検出により器具の位置を追跡するシステムおよび方法 | |
| EP1383427B1 (en) | Mr-based real-time radiation therapy oncology simulator | |
| US6101239A (en) | Medical imaging apparatus | |
| RU2535644C2 (ru) | Система оптического зонда с повышенной скоростью сканирования | |
| JP2004504898A (ja) | Mri誘導超音波治療システムのための機械式ポジショナー | |
| WO2006126108A1 (en) | Off-magnet patient scan positioning | |
| JP2005131408A (ja) | 回転自在の陽極を有するmr/x線スキャナ | |
| JP2907963B2 (ja) | 磁気共鳴モニタリング治療装置 | |
| US20160067527A1 (en) | Focused ultrasound system for small bore imaging | |
| WO2012173157A1 (ja) | コンピュータ断層撮影装置 | |
| JP5072284B2 (ja) | 磁気共鳴イメージング装置、コイル支持ユニット、高周波コイルユニット、ならびに磁気共鳴イメージング装置を制御する制御方法 | |
| JPH05344964A (ja) | Ct装置 | |
| RU2004132187A (ru) | Пассивное движение пациента в магнитно-резонансном томографе | |
| JP2018029763A (ja) | 医用画像診断システム | |
| JP3971268B2 (ja) | 磁気共鳴イメージング装置 | |
| JP4031964B2 (ja) | 磁気共鳴イメージング装置用受信コイル及びこれを用いた装置 | |
| CN210742484U (zh) | Mri装置及mri装置用的rf线圈单元 | |
| JP3300895B2 (ja) | 磁気共鳴イメージング装置及びそのテーブル制御方法 | |
| JP2005124855A (ja) | 磁気共鳴イメージング装置 | |
| JP4377645B2 (ja) | イメージガイド治療用処置器具及び磁気共鳴イメージング装置 | |
| CN105212935A (zh) | 具有闭锁装置的成像检查装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PD4A | Correction of name of patent owner | ||
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20180605 |