KR900001791B1 - 제어시스템 - Google Patents
제어시스템 Download PDFInfo
- Publication number
- KR900001791B1 KR900001791B1 KR1019850003765A KR850003765A KR900001791B1 KR 900001791 B1 KR900001791 B1 KR 900001791B1 KR 1019850003765 A KR1019850003765 A KR 1019850003765A KR 850003765 A KR850003765 A KR 850003765A KR 900001791 B1 KR900001791 B1 KR 900001791B1
- Authority
- KR
- South Korea
- Prior art keywords
- value
- transfer function
- command value
- speed
- motor
- Prior art date
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/281—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices the DC motor being operated in four quadrants
- H02P7/2815—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices the DC motor being operated in four quadrants whereby the speed is regulated by measuring the motor speed and comparing it with a given physical value
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/285—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only
- H02P7/2855—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only whereby the speed is regulated by measuring the motor speed and comparing it with a given physical value
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S388/00—Electricity: motor control systems
- Y10S388/90—Specific system operational feature
- Y10S388/902—Compensation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S388/00—Electricity: motor control systems
- Y10S388/923—Specific feedback condition or device
- Y10S388/93—Load or torque
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Electric Motors In General (AREA)
- Feedback Control In General (AREA)
Abstract
내용 없음.
Description
제1도는 종래의 속도제어시스템을 나타내는 블록도를 나타내는 개략블록도.
제2도는 종래의 속도제어시스템의 응답 특성을 나타내는 도면.
제3도는 본 발명의 실시예를 나타내는 블록도.
제4도는 전달함수표현을 사용하여 본 발명의 원리를 설명하는 블록도.
제5도는 본 발명에 의한 일실시예의 속도제어시스템을 설명하는 블록도.
제6a, 6b, 6c도 및 제7a, 7b, 7c도는 본 발명에 의한 실시예의 동작을 설명하기 위한 응답특성을 나타낸 도면들.
본 발명은 모터속도 제어시스템에 관한 것으로 특히 본 발명은 외란응답(disturbance response)특성을 개선한 속도제어시스템에 관한 것이다.
조작량지령치에 의해서 제어시스템을 동작시키는 조작기구와, 제어시스템의 제어치를 검출하는 검출기와, 검출기의 출력인 제어량의 검출치와 제어량지령치를 수신하여 조작령지령치를 출력하는 제어연산부를 구비한 제어시스템으로서 예를 들면 전력변환기를 사용하는 모터속도 제어시스템이 있다.
이후, 본 발명을 모터속도 제어시스템을 일예로 들어 설명하겠다.
모터속도 제어시스템에서는 일반적으로 모터에 결합되어있고 속도검출기가 검출된 속도검출치를 속도지령값과 비교하여 전력변환기의 전류를 제어함으로서 피드백제어가 행해지는 속도검출기가 있다.
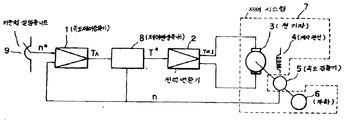
제1도는 피드백제어방식으로 DC모터의 속도를 제어하는 속도제어 시스템의 기본 구성을 나타내고 있다.
제1도에서 1은 속도제어 증폭기를 가리키고 2는 권력변환기를, 3과 4는 DC모터의 전기자와 계자권선, 5는 속도검출기, 6은 부하를 각각 나타내고 있다. DC모터의 계자권선 4에 대한 계자여자회로는 생략했다. 전력변환기 2는 제어정류기들, 쵸퍼(chopper)와 출력전류 I를 제어하는 전류제어회로를 포함하고 있다.
그러므로 전력변환기 2는 전류지령치에 따라서 그의 출력전류가 제어되는 전류증폭기로서 간주될 수 있는 것으로 하였다. 속도제어 증폭기 1은 기준치 설정유니트 9내에서 생성된 속도지령치 신호 n*과 검출속도치 신호 n을 수신하여 모터에 필요한 토르크치에 상당하는 토르크 지령치신호 T*를 출력시킨다. DC모터의 경우에, 그의 토르크와 전기자전류는 상호 비례관계에 있으므로 토르크 지령치신호 T*는 전류지령치 신호로서 전력변환기 2로 입력된다. 이에 의해서 전력 변환기 2가 전류 1를 모터의 전기자 내로 공급하게 되어 모터는 토르크 지령치신호 T*에 비례하는 토르크를 발생하여 모터의 속도가 변화된다. 이 속도 n은 속도검출기 5에 의해서 검출되어 속도제어 증폭기 1로 피드백된다.
속도제어시스템의 특징으로서 중요한 사실들은 모터속도가 속도지령치의 변화에 대해서 신속 정확하게 응답될 수 있고, 또한 부하의 변화에 따른 모터속도변화가 최소로 유지될 수 있으며, 또한 모터속도가 그의 초기속도로 신속하게 회복될 수 있다는 것이다. 전자는 지령치 응답특성, 후자는 외란응답특성이라고 정의한다. 그 시스템에서 그러한 특성을 결정하는데 중요한 구성요소는 속도제어 증폭기 1이다.
종래의 속도제어 증폭기는 비례제어증폭기, 비례적분제어증폭기 또는 안티오버슈트(antiover shoot)에 대한 보상을 갖는 비례적분제어증폭기등의 소위 제어증폭기를 사용하여 구성되어 있다.
이들외에도 여러 종류의 제어증폭기들이 목적에 따라서 사용되고 있다. 그러나, 이들의 제어증폭기들은 지령치응답이 중점적이고 일반적으로 외란응답은 지령치응답보다 느리게 설계되어 있다.
제2도는 안티오버슈트 보상을 갖는 비례적분 증폭기가 속도제어 증폭기로서 사용되는 경우에 지령치응답과 외란응답의 일예를 나타낸 도면이다. 제2도에서 횡측은 시간(S), 종측은 속도 n을 각각 나타내며 시각 0.0초에서 속도 지령은 0에서 1로 변화되며, 시각 0.5초에서 일정 부하가 가해지는 것과 그때의 응답을 나타내고 있다. 도시된 바와 같이 지령치 응답 시간은 약 0.1초인데 대해서 외란 응답시간은 약 0.3초여서 이들의 응답시간의 비는 약 3이다.
모터속도 제어시스템은 예를 들어 강철을 압연하는 롤링밀을 구동시키는데 사용되며 또한 이 적용에서 강철이 롤링밀을 통하여 통과할때 과중한 부하가 급격히 가해지므로 만일 그의 외란응답특성이 우수하지 않을 경우 그 결과로 압연강판의 두께의 균일성을 보장해주기 어렵기 때문에 외란응답의 우수성이 지령치 응답보다도 오히려 더 중요시된다.
따라서 본 발명의 목적은 그의 지령치 응답 특성을 저하시킴이 없이 그의 외란 응답특성을 개선할 수 있는 제어시스템을 제공하는데 있다.
상술한 목적은 제어시스템을 제공함에 의해서 달성되는데 여기서 제어연산 유니트는 제어량의 검출치의 소정의 전달함수 Gx(S)와 동일한 신호 A를 제공하는 수단과, 제1지령치인 전달함수(1+Gx(S).GLH(S))와 동일한 신호 B를 제공하는 수단과 그리고 상기 A와 B신호간의 차 T*를 제2지령값으로서 제어하는 수단을 포함한다. 여기서 GLH(S)는 T*에서 n까지의 모의 전달함수이다.
이하 첨부된 도면을 참고하여 본 발명의 양호한 실시예를 상세히 설명하겠다.
도면에서 동일 부호는 동일 부분을 가리킨다.
제3도는 본 발명의 일실시예를 나타내는 블록도이다. 제3도에서는 제1도에 나타낸 속도제어시스템에 제어연산유니트 8이 추가되어 있다.
제4도에는 제3도에 나타낸 속도제어시스템을 전달함수로 나타냈다. 부호 11과 12는 합산장치, 13, 14 및 15의 각 블록내에는 각 전달함수가 제공되어 있다. 16은 변환기, 모터 및 부하등의 부분들을 나타내는 블록군, 2는 토르크 지령치신호 T*로부터 발생된 모터토르크신호 T까지의 전력변환기의 전달함수를 나타내는 블록, 17은 부하토르크 TL이 가해지는 합산부, 그리고 7은 부하와 모터의 관성력의 합을 나타내는 블록이다. 부호 J는 관성력을 나타내며, S는 라프라스 연산자(laplace operator)를 나타낸다.
블록군 16의 토르크 지령치 신호T*로부터 속도 신호 n까지의 전달함수가 GL(S)로서 정의될때 전달함수 GL(S)는 식(1)로 표시될 수 있다.
종래의 예에는 제어연산 유니트가 구비되어 있지 않으므로 토르크 지령치신호 T*는 제어증폭기 1의 출력 TA와 동일하며, 또한 전달 함수 GL(S)도 종래 예에서의 제어증폭기 1의 출력으로부터 속도신후 n까지의 전달함수이다.
다음, 합산장치 12의 입력 B로부터 속도신호 n까지의 전달함수 n(S)/B(S) 즉, 전달함수 Gx(S)로 나타낸 블록 15가 추가되는 경우의 전달함수는 식(2)로 표시된다.
다음, 제어증폭기 1의 출력 TA로부터 상술한 신호 B까지의 전달한수 B(S)/TA(S)은 식(3)에 표시된다. 여기서 블록 14는 블록 15의 것과 동일한 전달함수 Gx(S)을 가지며, 또한 블록 13의 전달함수 GLH(S)이다.
따라서 제어증폭기 1의 출력 TA로 부터 속도 n까지의 전달함수 n(S)/TA(S)는 식 (4)로 표시할 수 있다.

여기서 만일 블록의 전달함수 GLH(S)가 전달함수 GL(S)와 동일하게 선택되면, 식(4)는 식(5)가 된다.
그러므로 만일 블록 13의 전달함수 GLH(S)가 토르크 지령치신호 T*로부터 속도신호 n까지의 전달함수 GL(S)로 세트될 경우, 본 발명에 의한 제어처리 유니트 8이 추가될지라도 제어증폭기 1의 출력 TA로부터 속도신호 n까지의 전달함수는 종래의 예에 비해 변화되지 않으므로 지령치 응답에 의한 변화는 없다.
여기서, 부하 TL(S)이 작용되는 경우에 속도 응답 n LNEW(S)는 다음과 같이 얻어질 수 있다.
만일 제어증폭기 1의 피드백 입력인 검출속도치 n으로부터 출력 TA까지의 전달함수가 전달함수 Gsp(S)로서 정의될 경우 전달함수 Gsp(S)로서 정의될 경우 전달함수 n LNEW(S)는 다음식(6)으로 표시할 수 있다.

종래의 예에서 속도응답 n LOLD(S)는 식(6)에서 Gx(0)=0이라고 가정할때 얻어질 수 있으며, 또한 다음식(7)으로 표시할 수 있다.

그러므로 종래의 예에 비해서 본 발명에 의한 외란응답은 다음식(8)에 의해서만 변화된다.
따라서, 만일 전달함수 Gx(S)가 적당히 선택될 경우, 외란응답은 개선될 수 있는 한편, 지령치 응답은 영향을 받지 않는다.
전달함수 Gx(S)는 기본적으로 임의로 선택될 수 있으나 식(8)로 표시된 전달함수가 비안정 또는 진동 부품들을 갖지않는 범위내에서 선정되어야만 한다.
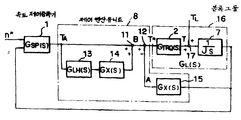
제5도에는 본 발명에 의한 실시예를 구체적으로 나타냈다. 본 실시예는 양호하게 외란응답이 개선된 장점을 획들할 수 있고, 또 그 세팅조정을 용이하게 할 수 있는 일예이다.
제어처리 유니트 8은 본 발명에 의해 추가된 부분이다. 부호 18, 19 및 20은 합산장치이며, 13은 전술한것과 공일한 토르크 지령치신호 T*로 부터 속도 n까지의 전달함수 GL(S)를 모의한 전달함수 GLH(S)를 포함하는 모의 전달함수 블록이며, 21과 22는 각 블록들내에 나타낸 GLC, GLA와 같은 각각의 계수에 각각의 입력값을 곱한 계수블록들이다.
계수블록 21의 출력인 신호 D는 계수블록 22내로 공급되어 계수 GLA에 곱해지고 곱해진 신호와 제어증폭기 1의출력 TA는 합산장치 18내로 공곱되어 감산되어 신호 C를 생성한다. 그런다음 신호 C는 모의 전달함수 블록 13내로 공급되며 또한 그의 출력과 검출속도치 n는 합산장치 20에 공급되어 감산된다. 합산장치 20의 출력은 계수블록(21)내로 공급되어 신호 D를 발생시키는 계수 GLC와 곱해진다. 한편, 신호 C는 신호 D와 함께 합산장치 19로 공급되어 가산되어 토르크 지령치신호 T*를 생성시킨다.
일반적으로, 토르크 지령치신호 T*로 부터 발생된 모터 토르크신호 T까지의 블록 2에 표시한 전달함수 GTRO(S)는 1차 지연 전달함수에 근사해지고 또한 관성력 J에 의해서 결정된 블록 7로 나타낸 전달함수 1/JS는 적분을 의미하므로 모의 전달함수 블록 13의 전달함수 GLH(S)를 실현시키려면 일차 지연회로(로우패스 필터와 등가)와 적분기를 적의 사용하면 된다.
만일 상술한 구성을 제4도의 원리적 블록도로 변형하면 전달함수 Gx(S)는 다음식(9)으로 표시할 수 있다.
계수 GLA가 0이라고 하면, 전달함수 Gx(S)는 단순한 계수 GLC로 되어 이는 본 발명의 형태를 최대로 간단한 구성이 되게한다.
상술한 구성에 의한 장점을 실험결과에 의해서 설명하겠다.
제6a∼6c도는 계수 GLA를 0으로 한정하고 계수 GLC를 변화시킨 경우의 응답들을 비교한 도표이다. 응답들은 속도지령치가 0.0초의 시각에서 0으로부터 1로 변화되고 0.5초 시각에서 일정 부하가 가해지는 조건하에 측정된 것이다. 제6a∼6c도에서, 횡측은 시간(초)을 나타내면, 종측은 속도 n을 나타낸다.
제6a도는 계수 GLC=0인 경우의 응답, 즉 제2도의 것과 동일한 종래의 예에의 응답을 나타내고 있다. 제6b도는 계수 GLC가 최적치로 간주되는 값에 세트되는 경우의 응답을 나타낸다. 제6c도는 계수 GLC가 최적값보다도 큰 값에 세트된 경우의 응답을 나타내는 것으로 발진 현상이 있기때문에 그 세팅이 적절치 못함을 알 수 있다.
제7a∼7c도는 계수 GLC가 제6b도의 최적값으로 간주되는 값에 세트되고, 계수 GLA가 변화되는 경우의 응답들을 비교하여 나타낸 것이다.
제7a도는 비교를 위해 제6b도의 것과 동일한 계수 GLA=0인 경우의 응답을 나타낸 것이다.
제7b도는 두 계수들 GLC와 GLA가 최적값으로 간주되는 값에 세트된 경우의 응답을 나타낸 것이다.
제7c도는 계수 GLA가 최적값보다도 큰 값에 세트된 경우의 응답을 나타낸 것이다.
실험결과에서 알 수 있는 바와 같이, 최적 응답을 위한 조정은 우선 계수 GLA를 0에 세트시킨 다음, 계수 GLC를 진동현상이 나타나기 직전의 시점까지 증가시키는 식으로 행해진다. 이렇게해서, 외란응답시에 불가피하게 발생되는 속도감소를 줄일 수 있다. 그러나, 속도의 회복시에 오버슈팅이 나타나므로 결국 그다음 계수 GLA가 오버슈팅이 사라지도록까지 증가되므로 최적응답이 쉽게 달성될 수 있다.
제6a도의 종래의 예의 응답과 제7b도의 본 발명에 의한 실시예의 응답을 비교하면 외란응답이 지령치 응답에 변화없이 개선되었음을 알 수 있었다. 외란응답에 대한 속도 감소는 70%로 감소되며, 또한 속도가 회복되는 순간까지의 응답시간이 30%로 단축되고 그밖에 지령치 응답시간과 외란 응답시간의 비가 약 1에 가까워지므로 그러한 개선으로 부터 나오는 장점들은 지극히 크다.
본 발명의 전술한 것 이외의 다른 장점은 부하의 관성력의 변화량에 대한 지령치의 변화를 줄일 수 있다는 것이다. 예를 들면, 관성이 증가될때에는 더 큰 토르크가 가속하는데 요구되나 부하 토르크가 부하의 이러한 증가분에 대해서 가해지는 경우와 마찬가지로 응답변화가 억제될 수 있다. 또한, 이것은 본 발명에 요구되는 모의 전달함수 블록의 전달함수가 어느정도 실제치와 다를지라도 본 발명의 장점을 발휘할 수 있으므로 모의 전달함수는 엄격한 정밀성을 필요로하지 않으며 결국 용이하게 실시할 수 있게되는 것이다.
또, 공진계가 모터와 부하간에 구성될 경우에도 공진으로 인한 토르크의 변동을 부하의 변동으로 억제할 수 있다. 예를 들면, 엘리베이터 시스템의 경우에, 승강모터와 부하인 객실사이에 공진계를 구성한 승강 로프가 설치되어 있으므로 그에 의해 승객의 탑승 안락감이 저하되지만 이것 또한 지극히 효과적인 대책으로서 본 발명에 의한 실시예를 이용함으로써 억제될 수 있다.
이상의 설명은 DC모터가 일정한 계자(field)로 제어되는 경우에 대한 것이었지만 계자(field)를 변화시킬 경우에 토오크 지령치변환기와 전류지령과의 사이에 계자의 변화에 대응하는 가변계수 블록을 추가 설비하든가, AC모터를 제어할 경우에 토오크 지령치로 부터 AC전류지령치를 연산하는 블록을 추가 설비하여도 마찬가지로 실시할 수 있다.
또, 본 발명은 제어대상으로서 모터를 사용한 속도제어 시스템에만 한정되는 것은 아니다.
본 발명은 첨부된 청구범위를 벗어나지않는 범위내에서 여러 수정변경이 가능함을 이해할 것이다.
Claims (6)
- 제어대상의 제어치(n)를 검출하는 검출수단(5)과, 기준치(n*)를 생성시키는 수단(9)과, 상기 검출치(n)와, 상기 기준치(n*)간의 차를 줄이는데 사용하는 제1지령치(TA)를 생성시키기 위하여 상기 검출치와 기준치를 수신하도록 연결된 제어증폭기수단(1)과, 제1지령치(TA)에 따라서 상기 제어량(n)을 제어하는 전력변환기수단(2)를 포함하는 제어시스템에 있어서; 제2지령치(T*)를 발생시키기 위해서 상기 제1지령치(TA)와 상기 검출치(n)을 수신하도록 연결된 제어연산수단(8)을 더 포함하되, 상기 제어연산 수단(8)은 제1의 소정의 전달함수 Gx(S)와 상기 검술값(n)의 라플라스 변환의 곱과, 동일한 라플라스 변환신호 A를 제공하기 위한 수단(15)과, 제2전달함수(1+Gx(S),GLH(S))와 상기 제1지령값(TA)의 라틀라스 변환의 곱과 동일한 라플라스변환신호 B를 제공하기 위한 수단(11,13,14)과, 그리고 상기 제2지령치(T*)로서 상기 신호 A와 B간의 차를 제공하기 위한 수단(12)을 포함하여, 여기서 전달함수 GLH(S)는 프로세스의 전달함수(GL(S)=n(S)/T*(S))의 모의이며, 또한 전력 변환수단(2)은 상기 제2지령치(T*)에 따라 제어되는 것이 특징인 제어시스템.
- 모터(3,4)의 속도(n)를 검출하는 속도검출수단(5)과, 기준속도치(n*)를 생성하는 수단과, 상기 검출속도치(n)과 상기 기준속도치(n*)간의 차를 줄이기 위하여 사용하는 제1지령치(TA)를 생성하기 위하여 상기 검출속도치와 상기 기준속도치를 수신하도록 연결된 속도제어 증폭기 수단(1)과, 상기 제1지령치에 따라서 모터(3,4)의 상기 속도(n)를 제어하는 전력변환기 수단(2)을 포함하는 모터속도 제어시스템에 있어서; 제2지령치(T*)를 생성하기 위해서 상기 제1지령치(TA)와 상기 검출속도치(n)를 수신하도록 연결된 제어연산수단(8)을 더 포함하고, 상기 제어연산수단(8)은 제1의 소정의전달함수 Gx(S)와 상기 검출값(n)의 라플라스 변환의 곱과, 동일한 라플라스 변환신호 A를 제공하기 위한 수단(15)과, 제2전달함수 (1+Gx(S).GLH(S))와 상기 제1지령값(TA)의 라플라스 변환의 곱과 동일한 라플라스변환신호 B를 제공하기 위한 수단(11,13,14)과, 그리고 상기 제2지령치(T*)로서 상기 신호 A와 B간의 차를 제공하기 위한 수단(12)을 포함하며, 여기서 전달함수 GLH(S)는 프로세스의 전달함수 (GL(S)=n(S)/T*(S))의 모의이며, 또한 전력 변환수단(2)은 상기 제2지령치(T*)에 따라 제어되는 것이 특징인 모터속도 제어시스템.
- 제1항에서, 상기 소정의 전달함수 Gx(S)는 하기식
 (식중, GLA와 GLC는 소정의 계수들로 정의된다)으로 표시될 수 있는 전달함수인 것이 특징인 제어시스템.
(식중, GLA와 GLC는 소정의 계수들로 정의된다)으로 표시될 수 있는 전달함수인 것이 특징인 제어시스템. - 제2항에서, 상기 소정의 전달함수 Gx(S)는 하기식;
 으로 표시될 수 있는 전달함수인 것이 특징인 모터속도 제어시스템.
으로 표시될 수 있는 전달함수인 것이 특징인 모터속도 제어시스템. - 제2 또는 4항에서, 상기 모터가 AC모터인 것을 특징으로 하는 모터속도 제어시스템.
- 제2 또는 4항에서, 상기 모터가 DC모터인 것을 특징으로 하는 모터속도 제어시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP59110264A JPS60254201A (ja) | 1984-05-30 | 1984-05-30 | 制御装置 |
| JP59-110264 | 1984-05-30 | ||
| US110264 | 1987-10-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR850008584A KR850008584A (ko) | 1985-12-18 |
| KR900001791B1 true KR900001791B1 (ko) | 1990-03-24 |
Family
ID=14531278
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019850003765A KR900001791B1 (ko) | 1984-05-30 | 1985-05-30 | 제어시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US4675584A (ko) |
| EP (1) | EP0163456B1 (ko) |
| JP (1) | JPS60254201A (ko) |
| KR (1) | KR900001791B1 (ko) |
| AU (1) | AU563255B2 (ko) |
| DE (1) | DE3581001D1 (ko) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01137305A (ja) * | 1987-11-25 | 1989-05-30 | Mitsubishi Electric Corp | フィードバック制御装置 |
| JPH01194881A (ja) * | 1988-01-26 | 1989-08-04 | Sony Corp | 記録再生装置 |
| JPH03100801A (ja) * | 1989-09-14 | 1991-04-25 | Toshiba Corp | 制御装置 |
| US4969757A (en) * | 1989-09-18 | 1990-11-13 | Honeywell Inc. | Motor torque control |
| JP2567158B2 (ja) * | 1991-04-26 | 1996-12-25 | 株式会社東芝 | 制御装置 |
| JPH06335275A (ja) * | 1993-05-24 | 1994-12-02 | Nec Corp | 印字ヘッドキャリジ速度制御方式 |
| US6747424B1 (en) | 2000-10-02 | 2004-06-08 | International Business Machines Corporation | Integrated fan speed control and fault detection circuitry |
| US7744366B2 (en) * | 2005-10-17 | 2010-06-29 | Thomas & Betts International, Inc. | System and method for improving the thermal efficiency of a heating system |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3649897A (en) * | 1970-10-22 | 1972-03-14 | Square D Co | Motor armature current limit system |
| US3826961A (en) * | 1972-09-28 | 1974-07-30 | Hitachi Ltd | Device for controlling speed of dc motor |
| US3775653A (en) * | 1973-01-16 | 1973-11-27 | Westinghouse Electric Corp | Proportional integrator squared (pi) 2 speed controller for utilization in a speed regulator system |
| SE371615C (ko) * | 1973-04-06 | 1975-04-10 | Asea Ab | |
| US3916279A (en) * | 1973-08-20 | 1975-10-28 | Hitachi Ltd | Friction compensating apparatus for load moving machines |
| JPS5362117A (en) * | 1976-11-15 | 1978-06-03 | Fujitsu Fanuc Ltd | Method of driving dc motor |
| JPS6022597B2 (ja) * | 1977-09-08 | 1985-06-03 | ファナック株式会社 | 直流モ−タの駆動装置 |
| US4230979A (en) * | 1978-04-10 | 1980-10-28 | General Electric Company | Controlled current inverter and motor control system |
| US4311951A (en) * | 1979-04-24 | 1982-01-19 | General Electric Company | Apparatus and method for high slip operation of an AC electric motor at substantially zero rotation and substantially zero torque |
| JPS6016195B2 (ja) * | 1979-06-08 | 1985-04-24 | 富士電機株式会社 | 直流電動機の制御装置 |
| JPS5815476A (ja) * | 1981-07-18 | 1983-01-28 | Brother Ind Ltd | モ−タの速度制御システム |
| JPS58123386A (ja) * | 1982-01-18 | 1983-07-22 | Toshiba Mach Co Ltd | モ−タの速度制御装置 |
| JPS58139690A (ja) * | 1982-02-12 | 1983-08-19 | Toyota Central Res & Dev Lab Inc | サーボ増幅器の制御回路 |
-
1984
- 1984-05-30 JP JP59110264A patent/JPS60254201A/ja active Granted
-
1985
- 1985-05-16 EP EP85303452A patent/EP0163456B1/en not_active Expired - Lifetime
- 1985-05-16 DE DE8585303452T patent/DE3581001D1/de not_active Expired - Lifetime
- 1985-05-28 AU AU43067/85A patent/AU563255B2/en not_active Expired
- 1985-05-29 US US06/739,063 patent/US4675584A/en not_active Expired - Lifetime
- 1985-05-30 KR KR1019850003765A patent/KR900001791B1/ko not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| KR850008584A (ko) | 1985-12-18 |
| US4675584A (en) | 1987-06-23 |
| EP0163456A2 (en) | 1985-12-04 |
| JPS60254201A (ja) | 1985-12-14 |
| EP0163456A3 (en) | 1987-02-04 |
| AU563255B2 (en) | 1987-07-02 |
| DE3581001D1 (de) | 1991-02-07 |
| AU4306785A (en) | 1986-09-11 |
| EP0163456B1 (en) | 1991-01-02 |
| JPH0330161B2 (ko) | 1991-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8040098B2 (en) | Position controller | |
| EP0658970B1 (en) | Motor vibration control device and method for matching a motor speed detected value with a motor speed reference value | |
| KR900001791B1 (ko) | 제어시스템 | |
| JPH086603A (ja) | サーボ系の調整方法及びそのサーボ制御装置 | |
| EP1027633B1 (en) | Method and apparatus for phase compensation in a vehicle control system | |
| CA1258484A (en) | Control system | |
| JP2923993B2 (ja) | 電動機の制御装置 | |
| JP3303566B2 (ja) | 共振比制御による2慣性共振系の振動抑制装置 | |
| JP5975943B2 (ja) | モータ制御装置 | |
| JP2681969B2 (ja) | 可変構造系によるクーロン摩擦の補償方法 | |
| JP2997278B2 (ja) | 電動機の制御装置 | |
| SU1264286A1 (ru) | Электропривод посто нного тока | |
| JP2001290504A (ja) | 制御装置 | |
| JP2850076B2 (ja) | 制御装置 | |
| JPH0433583A (ja) | 誘導電動機の制御装置 | |
| JPS63305780A (ja) | 電動機の可変速駆動装置 | |
| JPH06217579A (ja) | 電動機制御装置 | |
| JP3329163B2 (ja) | サーボモータの制御装置 | |
| JPS6337599B2 (ko) | ||
| KR940004958B1 (ko) | 유도 전동기의 속도 제어방법 | |
| JPS6337598B2 (ko) | ||
| JPS6035990A (ja) | 電動機の速度制御装置 | |
| JPS6334712B2 (ko) | ||
| JPH089672A (ja) | モータの速度制御装置 | |
| JPH01243866A (ja) | 電動機の速度制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20050302 Year of fee payment: 16 |
|
| EXPY | Expiration of term |