KR20160142240A - 온도 보상 회로 및 센서 장치 - Google Patents
온도 보상 회로 및 센서 장치 Download PDFInfo
- Publication number
- KR20160142240A KR20160142240A KR1020160067941A KR20160067941A KR20160142240A KR 20160142240 A KR20160142240 A KR 20160142240A KR 1020160067941 A KR1020160067941 A KR 1020160067941A KR 20160067941 A KR20160067941 A KR 20160067941A KR 20160142240 A KR20160142240 A KR 20160142240A
- Authority
- KR
- South Korea
- Prior art keywords
- resistor
- temperature
- temperature compensation
- quot
- voltage
- Prior art date
Links
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05F—SYSTEMS FOR REGULATING ELECTRIC OR MAGNETIC VARIABLES
- G05F1/00—Automatic systems in which deviations of an electric quantity from one or more predetermined values are detected at the output of the system and fed back to a device within the system to restore the detected quantity to its predetermined value or values, i.e. retroactive systems
- G05F1/10—Regulating voltage or current
- G05F1/46—Regulating voltage or current wherein the variable actually regulated by the final control device is dc
- G05F1/56—Regulating voltage or current wherein the variable actually regulated by the final control device is dc using semiconductor devices in series with the load as final control devices
- G05F1/565—Regulating voltage or current wherein the variable actually regulated by the final control device is dc using semiconductor devices in series with the load as final control devices sensing a condition of the system or its load in addition to means responsive to deviations in the output of the system, e.g. current, voltage, power factor
- G05F1/567—Regulating voltage or current wherein the variable actually regulated by the final control device is dc using semiconductor devices in series with the load as final control devices sensing a condition of the system or its load in addition to means responsive to deviations in the output of the system, e.g. current, voltage, power factor for temperature compensation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/007—Environmental aspects, e.g. temperature variations, radiation, stray fields
- G01R33/0082—Compensation, e.g. compensating for temperature changes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/028—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/14—Modifications for compensating variations of physical values, e.g. of temperature
Abstract
(과제) 온도 보상량만을 독립적으로 조정하는 것이 가능한 온도 보상 회로를 제공한다.
(해결 수단) 제 1 저항과 제 2 저항의 접속점에 형성되는 제 1 온도 보상 전압 단자와, 제 3 저항과 제 4 저항의 접속점에 형성되는 제 2 온도 보상 전압 단자와, 제 1 저항과 제 4 저항의 접속점에 형성되는 제 1 전압 단자와, 제 2 저항과 제 3 저항의 접속점에 형성되는 제 2 전압 단자와, 전원 단자와 제 1 전압 단자 사이에 접속된 제 5 저항과, 접지 단자와 제 2 전압 단자 사이에 접속된 제 6 저항을 구비하였다.
(해결 수단) 제 1 저항과 제 2 저항의 접속점에 형성되는 제 1 온도 보상 전압 단자와, 제 3 저항과 제 4 저항의 접속점에 형성되는 제 2 온도 보상 전압 단자와, 제 1 저항과 제 4 저항의 접속점에 형성되는 제 1 전압 단자와, 제 2 저항과 제 3 저항의 접속점에 형성되는 제 2 전압 단자와, 전원 단자와 제 1 전압 단자 사이에 접속된 제 5 저항과, 접지 단자와 제 2 전압 단자 사이에 접속된 제 6 저항을 구비하였다.
Description
본 발명은 온도 보상 회로 및 센서 장치에 관한 것으로, 특히 센서 소자의 감도의 온도 보상을 실시하는 회로에 관한 것이다.
요즈음, 여러 가지 센서 장치가 전자 기기에 탑재되어 활용되고 있다. 예로는, 자기 센서 장치를 전자 기기에 탑재하고, 자석을 덮개나 커버에 구비한 예를 들 수 있다. 전자 기기는, 덮개나 커버가 전자 기기로부터 먼 상태에서는 통상 동작을 실시하고, 덮개나 커버가 전자 기기에 가까워진 상태에서는, 전력 절약 모드로 이행하도록 동작한다. 자기 센서 장치는, 덮개나 커버와 전자 기기의 원근을, 자석으로부터의 자속 밀도의 변화에 의해 검출하고, 인가되는 자속 밀도가 소정값 이하인 상태인지 소정값 이상인 상태인지를 출력하여, 전자 기기에 전달한다. 여기서, 센서 장치의 출력 신호는, 온도 변화에 대해 일정한 것이 이상적이지만, 센서 장치를 구성하는 센서 소자 그 자체의 출력 신호가 온도 의존을 가지고 있기 때문에, 센서 소자의 온도 의존을 보상하기 위한 온도 보상 회로를 센서 장치에 탑재하는 것이 요구되고 있다.
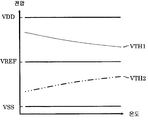
종래의 온도 보상 회로의 일례의 회로도를 도 10 에 나타낸다. 종래의 온도 보상 회로 BL1 은, 전원 단자 VDD 와 접지 단자 VSS 사이에 순서대로 직렬 접속된 저항 R11 ∼ R14 와 저항 R41 로 구성되어 있다. 저항 R11 과 저항 R12 의 접속점인 제 1 출력 단자 NTH1 로부터는 제 1 기준 전압 VTH1 이 출력되고, 저항 R12 와 저항 R13 의 접속점인 기준 전압 단자 NREF 로부터는 기준 전압 VREF 가 출력되며, 저항 R13 과 저항 R14 의 접속점인 제 2 출력 단자 NTH2 로부터는 제 2 기준 전압 VTH2 가 출력된다. 저항 R41 은, 제 1 출력 단자 NTH1 과 제 2 출력 단자 NTH2 사이에 접속된다.
저항 R11 ∼ R14 는, 저항값 R11 과 저항값 R14 가 동등하고, 저항값 R12 와 저항값 R13 이 동등하며, 저항값의 온도 계수가 동등하다. 저항 R41 은, 저항값의 온도 계수가 저항 R11 ∼ R14 의 온도 계수와 상이하다. 여기서는 설명의 편의상, 저항 R11 ∼ R14 의 저항값의 온도 계수는, 저항 R41 의 저항값의 온도 계수보다 크다고 하면,
[수학식 1]

[수학식 2]

[수학식 3]

가 된다. 여기서, 접지 단자 VSS 의 전압을 영 (제로) 으로 하였다. 또, RX 는 제 1 출력 단자 NTH1 과 제 2 출력 단자 NTH2 사이의 저항값으로, 다음 식으로 나타낸다.
[수학식 4]

식 (A1) 및 식 (A2) 에 식 (A4) 를 대입하면 다음 식을 얻는다.
[수학식 5]

[수학식 6]

온도가 높아지면 저항 R41 의 저항값은 저항 R11 의 저항값보다 작아지므로, R11/R41 의 항은 고온에서 커지고, 도 11 에 나타내는 바와 같이, VTH1 - VREF 는 고온에서 작아지고, 또 VREF - VTH2 도 작아진다. 이상과 같이, 기준 전압에 온도 의존성을 갖게 하여, 기준 전압의 온도 계수를 센서 소자의 온도 계수와 맞춤으로써, 센서 장치의 출력이 온도 변화에 대해 일정해지고, 온도 의존이 없는 정밀도가 높은 출력을 실현할 수 있다. 또, 저항 R41 과 저항 R11 ∼ R14 의 저항값을 조정하고, 온도 계수가 상이한 저항의 저항값의 비를 조정함으로써 온도 보상량의 조정이 가능하고, 광범위한 센서 장치 또는 반도체 장치에서 응용 가능한 온도 보상 회로가 작은 회로 규모로 실현되고 있었다.
그러나, 종래의 온도 보상 회로에 있어서는, 온도 보상량과 함께, 어느 기준 온도에서의 보상량도 변화하기 때문에, 기준 온도에서의 최적인 보상량과 최적인 온도 보상량을 양립할 수 있는 저항값의 범위가 좁고, 온도 보상 회로를 사용할 수 있는 범위가 한정된다는 과제가 있었다. 즉, 온도 보상량만을 독립적으로 조정할 수 없다는 과제가 있었다.
종래의 이와 같은 문제점을 해결하기 위해서, 본 발명의 온도 보상 회로는 이하와 같은 구성으로 하였다.
적어도 제 1 저항 ∼ 제 6 저항의 6 개의 저항을 구비하고, 제 1 저항과 제 2 저항의 접속점에 형성되는 제 1 출력 단자와, 제 3 저항과 제 4 저항의 접속점에 형성되는 제 2 출력 단자와, 제 1 저항과 제 4 저항의 접속점에 형성되는 제 1 전압 단자와, 제 2 저항과 제 3 저항의 접속점에 형성되는 제 2 전압 단자와, 전원 단자와 제 1 전압 단자 사이에 접속된 제 5 저항과, 접지 단자와 제 2 전압 단자 사이에 접속된 제 6 저항을 구비하고, 제 1 저항 ∼ 제 4 저항 중 적어도 하나의 저항의 저항값은 다른 저항의 저항값의 온도 계수와 상이한 온도 계수를 갖고, 제 1 출력 단자에서 출력되는 온도 보상 전압과 제 2 출력 단자에서 출력되는 온도 보상 전압이 소정 온도에 있어서 동일해지도록, 제 1 저항 ∼ 제 4 저항 중 적어도 하나의 저항의 저항값이 조정되어 있는 것을 특징으로 한 온도 보상 회로.
본 발명의 온도 보상 회로에 의하면, 온도 계수가 상이한 저항을 유효적으로 활용함으로써, 온도 계수만을 조정할 수 있고, 또한 온도 보상량을 조정할 수 있는 온도 보상 회로를 비교적 작은 회로 규모로 실현하는 것이 가능해진다.
도 1 은 제 1 실시형태의 온도 보상 회로의 회로도이다.
도 2 는 제 1 실시형태에 사용하는 저항의 온도 의존을 나타내는 도면이다.
도 3 은 제 1 실시형태의 출력 전압의 온도 의존을 나타내는 도면이다.
도 4 는 제 2 실시형태의 온도 보상 회로의 회로도이다.
도 5 는 제 3 실시형태의 온도 보상 회로의 회로도이다.
도 6 은 자기 센서의 감도의 온도 의존을 나타내는 도면이다.
도 7 은 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 예의 회로도이다.
도 8 은 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 다른 예의 회로도이다.
도 9 는 자기 센서 장치에 사용하는 기준 전압 회로의 일례를 나타내는 회로도이다.
도 10 은 종래의 온도 보상 회로의 회로도이다.
도 11 은 종래의 온도 보상 회로의 기준 전압의 온도 의존을 나타내는 도면이다.
도 2 는 제 1 실시형태에 사용하는 저항의 온도 의존을 나타내는 도면이다.
도 3 은 제 1 실시형태의 출력 전압의 온도 의존을 나타내는 도면이다.
도 4 는 제 2 실시형태의 온도 보상 회로의 회로도이다.
도 5 는 제 3 실시형태의 온도 보상 회로의 회로도이다.
도 6 은 자기 센서의 감도의 온도 의존을 나타내는 도면이다.
도 7 은 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 예의 회로도이다.
도 8 은 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 다른 예의 회로도이다.
도 9 는 자기 센서 장치에 사용하는 기준 전압 회로의 일례를 나타내는 회로도이다.
도 10 은 종래의 온도 보상 회로의 회로도이다.
도 11 은 종래의 온도 보상 회로의 기준 전압의 온도 의존을 나타내는 도면이다.
본 발명의 온도 보상 회로는, 반도체 회로에 있어서의 온도 보상 회로로서 폭넓게 이용될 수 있다. 이하, 본 발명의 온도 보상 회로에 대해 도면을 참조하여 설명한다.
<제 1 실시형태>
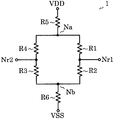
도 1 은, 제 1 실시형태의 온도 보상 회로의 회로도이다. 제 1 실시형태의 온도 보상 회로 (1) 는, 저항 R1 ∼ R6 으로 구성되어 있다.
저항 R1 과 저항 R2 의 접속점에 제 1 출력 단자 Nr1 이 형성되고, 저항 R3 과 저항 R4 의 접속점에 제 2 출력 단자 Nr2 가 형성된다. 저항 R1 과 저항 R4 의 접속점에 제 1 전압 단자 Na 가 형성되고, 저항 R2 와 저항 R3 의 접속점에 제 2 전압 단자 Nb 가 형성된다. 전원 단자 VDD 와 제 1 전압 단자 Na 사이에 저항 R5 가 접속되고, 접지 단자 VSS 와 제 2 전압 단자 Nb 사이에 저항 R6 이 접속된다.
제 1 출력 단자 Nr1, 제 2 출력 단자 Nr2, 제 1 전압 단자 Na, 제 2 전압 단자 Nb 의 각 단자의 전압을 각각 Vr1, Vr2, Va, Vb 와 같이 나타낸다. Vr1, Vr2 는 다음 식으로 산출된다.
[수학식 7]

[수학식 8]

Vr1 과 Vr2 의 차분을 온도 보상 전압 ΔVr 로 두면, 온도 보상 전압 ΔVr 은 다음 식으로 나타낸다.
[수학식 9]

저항 R1 ∼ R4 중 적어도 하나의 저항은, 다른 저항의 저항값의 온도 계수와 상이한 온도 계수를 가지고 있다.
도 2 는, 제 1 실시형태에 사용하는 저항 R1 ∼ R4 의 저항값의 온도 의존을 나타내는 도면이다. 설명의 편의상, 예로서 저항 R1, R3, R4 의 저항값과 각 저항값의 온도 계수는 동등하고, 저항 R2 의 저항값의 온도 계수는 저항 R1, R3, R4 의 저항값의 온도 계수와 상이하며, 특히 온도 계수가 작다고 한다. 저항 R1, R3, R4 의 각 저항값의 온도 계수를 제 1 온도 계수로 하고, 저항 R2 의 저항값의 온도 계수를 제 2 온도 계수로 한다. 또, 어느 소정의 온도 T0 에서 저항 R1 과 저항 R2 의 저항값이 동등하다고 하면, 온도 보상 전압 ΔVr 은 식 (3) 으로부터 다음과 같이 나타낸다.
[수학식 10]

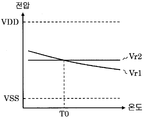
여기서, α 는 저항 R2 와 저항 R1 의 비로, α = R2/R1 이다. 온도 T0 에서는 저항 R1 과 저항 R2 의 저항값이 동등하고, α = 1 이 되기 때문에, 온도 보상 전압 ΔVr 은 영 (제로) 이 된다. 온도 T0 보다 높은 온도에서는, 저항 R2 의 저항값은 저항 R1 의 저항값보다 작아지므로, α < 1 이고, 온도 보상 전압 ΔVr 은 부 (負) 의 값이 된다. 온도 T0 보다 낮은 온도에서는, 저항 R2 의 저항값은 저항 R1 의 저항값보다 커지므로, α > 1 이고, 온도 보상 전압 ΔVr 은 정 (正) 의 값이 된다. 이 모습을 도 3 에 나타내었다.
도 3 은, 제 1 실시형태의 출력 전압의 온도 의존을 나타내는 도면이다. 온도 T0 에서는 ΔVr = Vr1 - Vr2 = 0 으로부터 Vr1 = Vr2 가 된다. 온도 T0 보다 높은 온도에서는, ΔVr = Vr1 - Vr2 < 0 으로부터 Vr1 < Vr2 가 된다. 온도 T0 보다 낮은 온도에서는, ΔVr = Vr1 - Vr2 > 0 으로부터 Vr1 > Vr2 가 된다.
또, 온도 T0 이외의 온도에 있어서의 온도 보상 전압 ΔVr 의 크기는, 식 (4) 로 나타내는 바와 같이, α = R2/R1, 즉 저항 R1 과 R2 의 크기에 따라 변화되지만, 전술한 바와 같이, 저항 R1 과 저항 R2 는 온도 T0 에서 저항값이 동등해지도록 조정하기 위해, 온도 T0 이외의 온도에 있어서의 크기를 조정하는 것은 곤란하다. 온도 보상 전압 ΔVr 의 크기를 조정하기 위해서, 저항 R5 와 저항 R6 을 형성하고 있다.
온도 보상 전압 ΔVr 은 식 (4) 로 나타내는 바와 같이, (Va - Vb) 의 값 에 따라 크기가 변화한다. 이후에서는 (Va - Vb) 를 산출한다. 저항 R5 와 저항 R6 에 흐르는 전류를 각각 I5, I6 로 두면, 각각 다음 식으로 나타낸다.
[수학식 11]

[수학식 12]

상기 식을 변형하여, Va 와 Vb, 추가로 Va - Vb 를 구하면 다음 식을 얻는다.
[수학식 13]
[수학식 14]
[수학식 15]
회로 구성 상, 전류 I5 와 전류 I6 은 동등하므로 식 (9) 는 다음 식과 같이 된다.
[수학식 16]
여기서, 저항 R1 ∼ R4 로 이루어지는 저항의 등가 저항을 Ra, 저항 R1 ∼ R6 으로 이루어지는 저항의 등가 저항을 Rt 로 두면, 등가 저항 Ra 와 등가 저항 Rt 의 저항값은 이하의 식으로 나타낸다.
[수학식 17]

[수학식 18]
회로 구성 상, 저항 R5 에 흐르는 전류와 등가 저항 Rt 에 흐르는 전류는 동등하므로,
[수학식 19]

가 된다. 식 (10) 에 식 (13) 을 대입하면 다음 식을 얻는다.
[수학식 20]

식 (14) 에 식 (12) 를 대입하면 다음 식을 얻는다.
[수학식 21]

추가로 식 (15) 를 변형하여 다음 식을 얻는다.
[수학식 22]

식 (16) 에 식 (11) 을 대입하면 다음 식으로 된다.
[수학식 23]

따라서, 저항 R5, R6 의 저항값이 클수록 Va - Vb 는 작아지고, 식 (3) 또는 식 (4) 로 나타내는 온도 보상 전압 ΔVr 의 값도 작아진다. 바꾸어 말하면, 저항 R5 와 저항 R6 의 저항값을 임의의 값으로 설정함으로써 Va - Vb 의 크기를 임의로 조정할 수 있고, 따라서, 식 (3) 또는 식 (4) 로 나타내는 온도 보상 전압 ΔVr 의 크기도 임의로 조정할 수 있게 된다. 한편, 저항 R5 와 저항 R6 의 저항값이 어떠한 저항값이어도, 온도 T0 에서는 온도 보상 전압 ΔVr 의 크기는 제로이기 때문에, 본 실시예의 온도 보상 회로는, 온도 보상량만을 독립적으로 조정하는 것이 가능하다.
이상에 의해 본 발명의 제 1 실시형태의 온도 보상 회로의 동작을 설명하고, 온도 계수가 상이한 저항을 유효적으로 활용함으로써, 온도 계수만을 조정할 수 있고, 또한 온도 보상량을 조정할 수 있는 온도 보상 회로를 비교적 작은 회로 규모로 실현할 수 있는 것을 나타내었다.
본 설명에 있어서는, 저항 R1 ∼ R4 의 각 저항의 저항값과 저항값의 온도 의존의 일례의 관계를 나타냈지만, 본 설명 내에서 기재한 구성이면, 반드시 이 저항간의 관계에 제한되는 것은 아니다. 예를 들어, 저항 R1 의 저항값의 온도 계수를 저항 R2 ∼ R4 와 상이하도록 해도 되고, 또 저항 R3 의 저항값의 온도 계수를 저항 R1, R2, R4 와 상이하도록 해도 된다. 또는, 저항 R1 과 R3 의 저항값의 온도 계수를 동등하게 하고, 이것과 상이한 저항값의 온도 계수를 갖는 저항 R2 와 R4 를 사용해도 된다. 설명을 위해서, 저항 R1 과 저항 R3 의 저항값은 동등하고, 저항 R2 와 저항 R4 의 저항값은 동등하며, 저항 R1 과 저항 R2 의 저항값의 비를 α 로 하고, α = R2/R1 로 나타내면, 식 (3) 으로부터 온도 보상 전압 ΔVr 은 다음 식과 같이 된다.
[수학식 24]

식 (18) 의 우변은, 식 (4) 의 우변의 2 배의 크기로 된다. 따라서, 온도 보상 전압 ΔVr 의 크기는, 식 (4) 에서 설명한 경우의 2 배가 되고, 온도 T0 에서는 크기가 영으로 되기 때문에, 상기에서 설명한 온도 보상 회로의 특징을 동일하게 가지고 있다. 또, 온도 T0 에서 온도 보상 전압 ΔVr 가 영이 되는 조건으로서, 상기 설명에서는 R1 = R2 의 경우를 들었지만, 이에 한정되는 것은 아니고, 식 (3) 의 분수 부분의 분자가 영으로 되는 저항값을 선정하면 된다. 구체적으로는, R2 × R4 와 R1 × R3 이 동등해지도록 저항값을 선정하면 된다.
<제 2 실시형태>
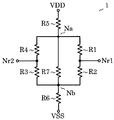
도 4 는, 제 2 실시형태의 온도 보상 회로의 회로도이다. 도 1 에 나타낸 제 1 실시형태와의 차이는, 저항 R7 을 추가한 점이다. 추가한 저항 R7 은 제 1 전압 단자 Na, 제 2 전압 단자 Nb 사이에 접속된다. 저항 R7 이 추가된 것에 의해, 저항 R1 ∼ R4 와 저항 R7 로 이루어지는 저항의 등가 저항 Ra' 는 다음과 같이 된다.
[수학식 25]

여기서, Ra 는, 제 1 실시형태의 식 (11) 로 나타낸 저항 R1 ∼ R4 로 이루어지는 등가 저항 Ra 와 동일하다. 또, 저항 R1 ∼ R7 로 이루어지는 저항의 등가 저항을 Rt' 로 두면, 등가 저항 Rt 는 이하의 식으로 나타낸다.
[수학식 26]
제 1 실시형태의 식 (13) 내지 식 (17) 의 도출 과정과 동일하게 하여 Va - Vb 를 구하면, 다음 식과 같이 된다.
회로 구성 상, 저항 R5 에 흐르는 전류와 등가 저항 Rt' 에 흐르는 전류는 동등하므로,
[수학식 27]

가 된다. 식 (10) 에 식 (21) 을 대입하면 다음 식을 얻는다.
[수학식 28]

식 (22) 에 식 (20) 을 대입하면 다음 식을 얻는다.
[수학식 29]

추가로 식 (23) 을 변형하여 다음 식을 얻는다.
[수학식 30]

식 (24) 에 식 (19) 를 대입하면 다음 식으로 된다.
[수학식 31]

제 1 실시형태에서 구한 식 (16) 과 비교하면, 분모에 (1 + Ra/R7) 의 항이 추가되어 있다. 즉, 저항 R7 을 추가한 것에 의해 Va - Vb 의 값이 작아지고, 저항 R7 의 저항값이 작을수록 Va - Vb 는 작아지며, 식 (3) 또는 식 (4) 로 나타내는 온도 보상 전압 ΔVr 의 값도 작아진다. 바꾸어 말하면, 저항 R7 의 저항값을 임의의 값으로 설정함으로써 Va - Vb 의 크기를 임의로 조정할 수 있고, 따라서, 식 (3) 또는 식 (4) 로 나타내는 온도 보상 전압 ΔVr 의 크기도 임의로 조정할 수 있게 된다. 한편, 저항 R7 의 저항값이 어떠한 저항값이어도, 온도 T0 에서는 온도 보상 전압 ΔVr 의 크기는 제로이기 때문에, 본 실시형태의 온도 보상 회로는, 온도 보상량만을 독립적으로 조정하는 것이 가능하다. 또, 저항 R7 의 저항값의 온도 계수를 등가 저항 Ra 의 저항값의 온도 계수와 상이하게 함으로써, Va - Vb 에도 온도 의존을 갖게 하는 것이 가능해지기 때문에, 보다 유연하게 온도 보상 전압 ΔVr 의 크기를 조정하는 것도 가능하다.
이상에 의해 본 발명의 제 2 실시형태의 온도 보상 회로의 동작을 설명하고, 온도 계수가 상이한 저항을 유효적으로 활용함으로써, 온도 계수만을 조정할 수 있고, 또한 온도 보상량을 조정할 수 있는 온도 보상 회로를 비교적 작은 회로 규모로 실현할 수 있는 것을 나타내었다.
<제 3 실시형태>
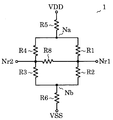
도 5 는, 제 3 실시형태의 온도 보상 회로의 회로도이다. 도 1 에 나타낸 제 1 실시형태와의 차이는, 저항 R8 을 추가한 점이다. 추가된 저항 R8 은 제 1 출력 단자 Nr1 과 제 2 출력 단자 Nr2 사이에 접속된다. 이하, 본 실시예에 있어서의 제 1 출력 단자 Nr1 의 전압 Vr1', 제 2 출력 단자 Nr2 의 전압 Vr2', 온도 보상 전압 ΔVr' 를 산출한다. 저항 R1 ∼ R4 및 R8 에 흐르는 전류를 각각 I1 ∼ I4, I8 로 하면, 각각의 관계는 다음 식으로 나타낸다.
[수학식 32]

[수학식 33]

[수학식 34]

[수학식 35]

[수학식 36]

[수학식 37]
[수학식 38]
식 (26) ∼ 식 (32) 로부터 온도 보상 전압 ΔVr' = Vr1' - Vr2' 를 산출하면, 다음 식과 같이 된다.
[수학식 39]

여기서, 도중의 계산식은 할애하였다. 식 (33) 으로 나타내는 본 실시형태의 온도 보상 전압 ΔVr' 와, 식 (3) 으로 나타내는 제 1 실시형태의 온도 보상 회로의 온도 보상 전압 ΔVr 을 비교하면,
[수학식 40]

의 관계로 나타낸다. 즉, 저항 R8 을 추가한 것에 의해 온도 보상 전압 ΔVr' 의 값이 작아진다. 바꾸어 말하면, 저항 R8 의 저항값을 임의의 값으로 설정함으로써 온도 보상 전압 ΔVr' 의 크기를 임의로 조정할 수 있게 된다. 한편, 저항 R8 의 저항값이 어떠한 저항값이어도, 온도 T0 에서는 온도 보상 전압 ΔVr' 의 크기는 제로이기 때문에, 본 실시형태의 온도 보상 회로는, 온도 보상량만을 독립적으로 조정하는 것이 가능하다. 또, 저항 R8 의 저항값의 온도 계수를, 저항 R1 ∼ R4 중 적어도 하나의 저항의 저항값의 온도 계수와 동일하게 하거나, 또는 상기 저항 R1 ∼ R4 중 적어도 하나의 저항 이외의 저항의 저항값의 온도 계수와 동일하게 하거나, 및 저항 R8 의 저항값의 크기에 따라, 온도 보상 전압 ΔVr' 의 온도 계수를 변경하는 것이 가능해지기 때문에, 보다 유연하게 온도 보상 전압 ΔVr 의 크기를 조정하는 것도 가능하다.
이상에 의해 본 발명의 제 3 실시형태의 온도 보상 회로의 동작을 설명하고, 온도 계수가 상이한 저항을 유효적으로 활용함으로써, 온도 계수만을 조정할 수 있고, 또한 온도 보상량을 조정할 수 있는 온도 보상 회로를 비교적 작은 회로 규모로 실현할 수 있는 것을 나타내었다.
<본 발명의 온도 보상 회로의 응용예>
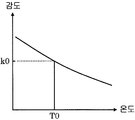
도 6 은, 센서 소자의 감도의 온도 의존을 나타낸 도면이다. 예로서, 자기 센서의 일례인 홀 소자의 감도의 온도 의존을 나타내었다. 홀 소자의 감도는, 일반적으로는 이동도에 비례하기 때문에, 고온에서 감도가 낮아지는 특성을 나타낸다. 소정의 온도 T0 에 있어서의 감도를 k0 으로 하면, 소정의 온도 T0 보다 높은 온도에서는 감도는 k0 보다 낮아지고, 소정의 온도 T0 보다 낮은 온도에서는 감도는 k0 보다 높아진다. 센서 소자를 탑재한 센서 장치의 출력에는, 온도에 대해 변화가 없거나 또는 변화가 작은 것이 요구되기 때문에, 센서 장치에는 센서 소자의 온도 의존 특성을 보상하는 회로가 요구되는, 이와 같은 경우에 본 발명의 온도 보상 회로는 바람직하다. 도 7 및 도 8 에, 본 발명의 온도 보상 회로를 센서 장치에 적용한 예를 나타낸다.
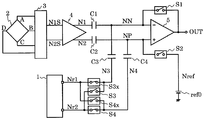
도 7 은, 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 예의 회로도이다. 자전 변환 소자인 홀 소자 (2) 의 신호는, 스위치 회로 (3) 를 개재하여 차동 증폭기 (4) 에 입력되고, 차동 증폭기 (4) 는 이것을 증폭시키고, 증폭된 신호는 용량 C1, C2 를 개재하여 비교기 (5) 에 입력된다. 비교기 (5) 에서는, 홀 소자 (2) 의 출력인, 인가된 자속 밀도에 따른 신호에 기초하여 단자 N1 및 단자 N2 에 공급되는 전압차와, 단자 N3 및 단자 N4 에 공급되는 전압차를 비교하고, 인가된 자속 밀도가 소정의 자속 밀도보다 큰지 작은지를 출력한다. 스위치 회로 (3), 스위치 S1, S2, 및 용량 C1 ∼ C4, 기준 전압 ref0 은, 홀 소자 (2) 나 차동 증폭기 (4) 나 비교기 (5) 가 가지고 있는 오차 성분을 제거하고, 정밀도가 높은 비교 결과를 얻기 위해서 사용된다. 도 6 에서 나타낸 바와 같이, 홀 소자 (2) 의 감도는 온도 의존을 가지기 때문에, 단자 N3 및 단자 N4 에 공급되는 전압차가 온도에 대해 일정한 경우에는, 비교기 (5) 의 출력, 즉 자기 센서 장치의 출력은, 온도에 대해 일정하지 않은, 온도 의존을 갖는 출력이 된다. 이 홀 소자 (2) 의 온도 의존을 보상하기 위해서, 단자 N3 및 단자 N4 에는, 본 발명의 온도 보상 회로 (1) 의 제 1 출력 단자 Nr1 및 제 2 출력 단자 Nr2 가, 스위치 S3, S3x, S4, S4x 를 개재하여 접속되고, 온도 보상 전압 ΔVr 또는 ΔVr' 가 공급됨으로써, 온도 의존이 없는 자기 센서 장치의 출력을 얻는 것이 가능해진다.
도 8 은, 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 다른 예의 회로도이다. 도 7 에 나타낸 자기 센서 장치와의 차이는, 기준 전압 회로 (6) 와 스위치 S5, S5x, S6, S6x 를 추가한 점이다. 단자 N3 및 단자 N4 에는, 기준 전압 회로 (6) 의 출력 단자 Nr3 및 출력 단자 Nr4 가, 스위치 S5, S5x, S6, S6x 를 개재하여 접속되고, 온도 의존이 없는 기준 전압 ΔVref 가 공급된다. 따라서, 소정의 온도 T0 에서의 보상량을 기준 전압 회로 (6) 에 의해 공급하고, 온도 보상량을 온도 보상 회로 (1) 에 의해 공급하는 것이 가능하다. 바꾸어 말하면, 온도 의존이 없는 자기 센서 장치의 출력을 얻을 수 있음과 함께, 인가된 자속 밀도가 소정의 자속 밀도보다 큰지 작은지의 임계값 레벨을 조정하는 것이 가능해진다.
도 9 는, 도 8 에 나타낸 기준 전압 회로 (6) 의 일례를 나타내는 회로도이다. 기준 전압 회로 (6) 는, 전원 단자 VDD 와 접지 단자 VSS 사이에 직렬로 접속된 저항 Rx1 ∼ Rx3 으로 구성된다. 저항 Rx1 과 Rx2 의 접속점에 출력 단자 Nr3 가 형성되고, 저항 Rx2 와 Rx3 의 접속점에 출력 단자 Nr4 가 형성된다.
출력 단자 Nr3 및 출력 단자 Nr4 의 전압을 각각 Vr3, Vr4, 기준 전압 ΔVref = Vr3 - Vr4 로 하면 다음 식을 얻는다.
[수학식 41]

저항 Rx1 ∼ Rx3 을 동일한 온도 계수를 갖는 저항으로 구성하면, 기준 전압 ΔVref 는 온도 의존이 없는 전압이 된다. 또, 기준 전압 ΔVref 의 크기는, 저항 Rx1 ∼ Rx3 의 저항값의 비를 조정함으로써, 임의로 조정 가능하다.
도 7 ∼ 9 에 본 발명의 온도 보상 회로를 자기 센서 장치에 응용한 예를 나타내었다. 본 설명에 있어서는, 설명을 위해서 구체적인 예를 나타냈지만, 반드시 이 구성이나 센서 소자에 제한되는 것은 아니고, 광범위한 반도체 회로에 있어서 응용 가능하다.
1 : 온도 보상 회로
2 : 홀 소자
3 : 스위치 회로
4 : 차동 증폭기
5 : 비교기
6 : 기준 전압 회로
2 : 홀 소자
3 : 스위치 회로
4 : 차동 증폭기
5 : 비교기
6 : 기준 전압 회로
Claims (6)
- 적어도 제 1 저항 ∼ 제 6 저항의 6 개의 저항을 구비하고,
상기 제 1 저항과 상기 제 2 저항의 접속점에 형성되는 제 1 출력 단자와,
상기 제 3 저항과 상기 제 4 저항의 접속점에 형성되는 제 2 출력 단자와,
상기 제 1 저항과 상기 제 4 저항의 접속점에 형성되는 제 1 전압 단자와,
상기 제 2 저항과 상기 제 3 저항의 접속점에 형성되는 제 2 전압 단자와,
전원 단자와 상기 제 1 전압 단자 사이에 접속된 상기 제 5 저항과,
접지 단자와 상기 제 2 전압 단자 사이에 접속된 상기 제 6 저항을 구비하고,
상기 제 1 저항 ∼ 상기 제 4 저항 중 적어도 하나의 저항의 저항값은, 다른 상기 저항의 저항값의 온도 계수와 상이한 온도 계수를 갖고,
상기 제 1 출력 단자에서 출력되는 온도 보상 전압과 상기 제 2 출력 단자에서 출력되는 온도 보상 전압이 소정 온도에 있어서 동등해지도록, 상기 제 1 저항 ∼ 상기 제 4 저항 중 적어도 하나의 저항의 저항값이 조정되어 있는 것을 특징으로 하는 온도 보상 회로. - 적어도 제 1 저항 ∼ 제 6 저항의 6 개의 저항을 구비하고,
상기 제 1 저항과 상기 제 2 저항의 접속점에 형성되는 제 1 출력 단자와,
상기 제 3 저항과 상기 제 4 저항의 접속점에 형성되는 제 2 출력 단자와,
상기 제 1 저항과 상기 제 4 저항의 접속점에 형성되는 제 1 전압 단자와,
상기 제 2 저항과 상기 제 3 저항의 접속점에 형성되는 제 2 전압 단자와,
전원 단자와 상기 제 1 전압 단자 사이에 접속된 상기 제 5 저항과,
접지 단자와 상기 제 2 전압 단자 사이에 접속된 상기 제 6 저항을 구비하고,
상기 제 1 저항 ∼ 상기 제 4 저항 중 적어도 하나의 저항의 저항값은, 다른 상기 저항의 저항값의 온도 계수와 상이한 온도 계수를 갖고,
상기 제 1 저항의 저항값과 상기 제 3 저항의 저항값의 곱의 값과 상기 제 2 저항의 저항값과 상기 제 4 저항의 저항값의 곱의 값이,
소정 온도에 있어서 동등한 것을 특징으로 하는 온도 보상 회로. - 제 1 항 또는 제 2 항에 있어서,
상기 온도 보상 회로에 있어서,
상기 제 1 전압 단자와 상기 제 2 전압 단자 사이에 접속된 제 7 저항을 구비한 것을 특징으로 하는 온도 보상 회로. - 제 1 항 또는 제 2 항에 있어서,
상기 온도 보상 회로에 있어서,
상기 제 1 출력 단자와 상기 제 2 출력 단자 사이에 접속된 제 8 저항을 구비한 것을 특징으로 하는 온도 보상 회로. - 제 1 항 또는 제 2 항에 있어서,
상기 온도 보상 회로에 있어서,
상기 제 1 전압 단자와 상기 제 2 전압 단자 사이에 접속된 제 7 저항과,
상기 제 1 출력 단자와 상기 제 2 출력 단자 사이에 접속된 제 8 저항을 구비한 것을 특징으로 하는 온도 보상 회로. - 센서 소자에 인가되는 물리량의 강도에 따라 출력을 실시하는 센서 장치로서,
제 1 항 또는 제 2 항에 기재된 온도 보상 회로를 구비하고,
상기 온도 보상 회로는, 상기 센서 소자의 온도 계수의 보상을 실시하는 것을 특징으로 하는 센서 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2015-112309 | 2015-06-02 | ||
| JP2015112309A JP6511336B2 (ja) | 2015-06-02 | 2015-06-02 | 温度補償回路およびセンサ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160142240A true KR20160142240A (ko) | 2016-12-12 |
Family
ID=56684426
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160067941A KR20160142240A (ko) | 2015-06-02 | 2016-06-01 | 온도 보상 회로 및 센서 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10088532B2 (ko) |
| EP (1) | EP3101440B1 (ko) |
| JP (1) | JP6511336B2 (ko) |
| KR (1) | KR20160142240A (ko) |
| CN (1) | CN106227285B (ko) |
| TW (1) | TWI681197B (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6994843B2 (ja) * | 2017-04-28 | 2022-01-14 | エイブリック株式会社 | 磁気センサ回路 |
| IT201700071189A1 (it) | 2017-06-26 | 2018-12-26 | St Microelectronics Srl | Circuito di compensazione in temperatura, dispositivo e procedimento corrispondenti |
| EP3467522B1 (en) * | 2017-10-06 | 2023-02-22 | STMicroelectronics S.r.l. | A temperature compensation circuit, corresponding device and method |
| EP3644080B1 (en) * | 2018-10-23 | 2022-08-03 | Melexis Bulgaria Ltd. | Sensor circuit with offset compensation |
| DE102020212114A1 (de) * | 2020-09-11 | 2022-03-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Verfahren zum Bestimmen einer Empfindlichkeit eines Hallsensorelements und Hallsensor mit zumindest einem Hallsensorelement |
| CN113411074B (zh) * | 2021-07-13 | 2022-11-15 | 上海艾为电子技术股份有限公司 | 霍尔传感器开关及电子设备 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010117270A (ja) | 2008-11-13 | 2010-05-27 | Seiko Instruments Inc | センサ回路 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5453877A (en) * | 1977-10-07 | 1979-04-27 | Hitachi Ltd | Temperature compensation circuit of semiconductor strain gauge |
| US4143549A (en) * | 1978-01-27 | 1979-03-13 | The United States Of America As Represented By The Secretary Of The Navy | Temperature measuring system |
| DE2940315C2 (de) * | 1978-10-10 | 1982-11-04 | Nippondenso Co., Ltd., Kariya, Aichi | Einrichtung zum Ermitteln des Drehwinkels eines Drehkörpers |
| JPS56140203A (en) * | 1980-04-02 | 1981-11-02 | Toyota Central Res & Dev Lab Inc | Bridge circuit |
| US4363243A (en) * | 1981-05-01 | 1982-12-14 | Eaton Corporation | Strain gage measurement circuit for high temperature applications using dual constant current supplies |
| JPS5896202U (ja) * | 1981-12-23 | 1983-06-30 | 株式会社石田衡器製作所 | 歪みゲ−ジの温度補償回路 |
| US4587499A (en) * | 1982-06-07 | 1986-05-06 | Toyo Communication Equipment Co., Ltd. | Temperature compensating circuit for oscillator |
| JPH0717029Y2 (ja) * | 1988-07-29 | 1995-04-19 | 横河電機株式会社 | 磁場検出回路 |
| US5121064A (en) * | 1990-08-31 | 1992-06-09 | Allied-Signal, Inc. | Method and apparatus for calibrating resistance bridge-type transducers |
| US5187985A (en) * | 1991-09-19 | 1993-02-23 | Honeywell Inc. | Amplified pressure transducer |
| US5253532A (en) * | 1992-03-09 | 1993-10-19 | Timex Corporation | Temperature compensated pressure transducer with digital output for low voltage power supply |
| US5402064A (en) * | 1992-09-02 | 1995-03-28 | Santa Barbara Research Center | Magnetoresistive sensor circuit with high output voltage swing and temperature compensation |
| US5953173A (en) * | 1996-09-17 | 1999-09-14 | International Business Machines Corporation | High CMRR and sensor-disk short-circuit protection device for dual element magnetoresistive heads |
| KR100314438B1 (ko) * | 1998-10-31 | 2002-04-24 | 구자홍 | 써모파일센서를이용한온도측정회로 |
| JP2002148131A (ja) * | 2000-11-10 | 2002-05-22 | Denso Corp | 物理量検出装置 |
| JP4236402B2 (ja) * | 2001-10-09 | 2009-03-11 | 富士通マイクロエレクトロニクス株式会社 | 半導体装置 |
| JP2006121891A (ja) * | 2004-09-24 | 2006-05-11 | Rohm Co Ltd | ファンモータ駆動装置および冷却装置 |
| US20080088268A1 (en) * | 2004-09-24 | 2008-04-17 | Rohm Co., Ltd. | Fan Motor Drive Device and Cooler |
| SG139588A1 (en) | 2006-07-28 | 2008-02-29 | St Microelectronics Asia | Addressable led architecure |
| JP5363075B2 (ja) * | 2008-11-13 | 2013-12-11 | セイコーインスツル株式会社 | センサ回路 |
| CN101594140A (zh) * | 2009-06-18 | 2009-12-02 | 浙江大学 | 一种薄膜体声波振荡器的温度漂移补偿方法和电路 |
| CN101706345A (zh) * | 2009-10-30 | 2010-05-12 | 江苏大学 | 一种用于微型压力传感器灵敏度热漂移的补偿方法 |
| JP6049488B2 (ja) * | 2013-02-14 | 2016-12-21 | エスアイアイ・セミコンダクタ株式会社 | センサ回路 |
| WO2014189733A1 (en) * | 2013-05-24 | 2014-11-27 | Allegro Microsystems, Llc | Magnetic field sensor for detecting a magnetic field in any direction above thresholds |
| CN104579172B (zh) * | 2014-11-28 | 2017-06-06 | 上海华虹宏力半导体制造有限公司 | 具有温度系数补偿的电阻电路 |
-
2015
- 2015-06-02 JP JP2015112309A patent/JP6511336B2/ja active Active
-
2016
- 2016-05-18 TW TW105115241A patent/TWI681197B/zh not_active IP Right Cessation
- 2016-05-26 US US15/165,445 patent/US10088532B2/en not_active Expired - Fee Related
- 2016-06-01 KR KR1020160067941A patent/KR20160142240A/ko unknown
- 2016-06-01 EP EP16172517.1A patent/EP3101440B1/en not_active Not-in-force
- 2016-06-02 CN CN201610384549.4A patent/CN106227285B/zh not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010117270A (ja) | 2008-11-13 | 2010-05-27 | Seiko Instruments Inc | センサ回路 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160356862A1 (en) | 2016-12-08 |
| TW201643442A (zh) | 2016-12-16 |
| EP3101440A1 (en) | 2016-12-07 |
| EP3101440B1 (en) | 2018-08-01 |
| CN106227285B (zh) | 2019-08-16 |
| CN106227285A (zh) | 2016-12-14 |
| TWI681197B (zh) | 2020-01-01 |
| JP2016223974A (ja) | 2016-12-28 |
| US10088532B2 (en) | 2018-10-02 |
| JP6511336B2 (ja) | 2019-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160142240A (ko) | 온도 보상 회로 및 센서 장치 | |
| JP5836074B2 (ja) | 温度検出回路及びその調整方法 | |
| US9128127B2 (en) | Sensor device | |
| US9322719B2 (en) | Input stage for temperature measurement system | |
| US9470585B2 (en) | Calibrated temperature measurement system | |
| US9488529B2 (en) | Temperature measurement system | |
| KR101243473B1 (ko) | 분압 회로 및 자기 센서 회로 | |
| JP6180752B2 (ja) | センサ装置 | |
| KR101352308B1 (ko) | 센서 회로 | |
| US9267818B2 (en) | Magnetic sensor device | |
| US9322672B2 (en) | Magnetic sensor device | |
| JP6270002B2 (ja) | 擬似抵抗回路及び電荷検出回路 | |
| US9837997B2 (en) | Comparison circuit and sensor device | |
| JP6291224B2 (ja) | 磁気センサ | |
| US8575912B1 (en) | Circuit for generating a dual-mode PTAT current | |
| KR102117168B1 (ko) | 물리적 파라미터를 측정하기 위한 전자 디바이스 | |
| JP2017188783A (ja) | A/dコンバータ回路および電子機器 | |
| JP2016194462A (ja) | センサ装置 |