KR20140033128A - 영상유도수술을 위해 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 - Google Patents
영상유도수술을 위해 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 Download PDFInfo
- Publication number
- KR20140033128A KR20140033128A KR1020137033281A KR20137033281A KR20140033128A KR 20140033128 A KR20140033128 A KR 20140033128A KR 1020137033281 A KR1020137033281 A KR 1020137033281A KR 20137033281 A KR20137033281 A KR 20137033281A KR 20140033128 A KR20140033128 A KR 20140033128A
- Authority
- KR
- South Korea
- Prior art keywords
- medical device
- anatomical structure
- medical
- computer model
- shape
- Prior art date
Links
- 210000003484 anatomy Anatomy 0.000 title claims abstract description 133
- 238000002675 image-guided surgery Methods 0.000 title description 4
- 238000005094 computer simulation Methods 0.000 claims abstract description 87
- 238000003384 imaging method Methods 0.000 claims abstract description 30
- 238000000034 method Methods 0.000 claims description 64
- 230000000737 periodic effect Effects 0.000 claims description 16
- 210000004072 lung Anatomy 0.000 claims description 10
- 239000013307 optical fiber Substances 0.000 claims description 7
- 230000004044 response Effects 0.000 claims description 7
- 230000000638 stimulation Effects 0.000 claims description 5
- 210000002216 heart Anatomy 0.000 claims description 4
- 230000001953 sensory effect Effects 0.000 claims description 4
- 210000004556 brain Anatomy 0.000 claims description 2
- 210000000621 bronchi Anatomy 0.000 claims description 2
- 210000003123 bronchiole Anatomy 0.000 claims description 2
- 238000004590 computer program Methods 0.000 claims description 2
- 210000002249 digestive system Anatomy 0.000 claims description 2
- 210000000056 organ Anatomy 0.000 claims description 2
- 235000019640 taste Nutrition 0.000 claims description 2
- 230000002485 urinary effect Effects 0.000 claims description 2
- 239000008280 blood Substances 0.000 claims 4
- 210000004369 blood Anatomy 0.000 claims 4
- 230000037361 pathway Effects 0.000 claims 1
- 238000013459 approach Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 239000000835 fiber Substances 0.000 description 4
- 0 *CC(CC1)CCC1C(C(*)C(*)CCCC1)C(*2CCC(C*)CC2)C1*1CCC(CCCC=*)CC1 Chemical compound *CC(CC1)CCC1C(C(*)C(*)CCCC1)C(*2CCC(C*)CC2)C1*1CCC(CCCC=*)CC1 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000017531 blood circulation Effects 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 238000002594 fluoroscopy Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000029058 respiratory gaseous exchange Effects 0.000 description 2
- 238000001931 thermography Methods 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 206010011224 Cough Diseases 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 235000019658 bitter taste Nutrition 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 239000002071 nanotube Substances 0.000 description 1
- 238000012014 optical coherence tomography Methods 0.000 description 1
- 230000003094 perturbing effect Effects 0.000 description 1
- 210000002345 respiratory system Anatomy 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
- 210000003437 trachea Anatomy 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00055—Operational features of endoscopes provided with output arrangements for alerting the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/009—Flexible endoscopes with bending or curvature detection of the insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/01—Guiding arrangements therefore
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/045—Control thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/267—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the respiratory tract, e.g. laryngoscopes, bronchoscopes
- A61B1/2676—Bronchoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
- A61B5/0037—Performing a preliminary scan, e.g. a prescan for identifying a region of interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02007—Evaluating blood vessel condition, e.g. elasticity, compliance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02028—Determining haemodynamic parameters not otherwise provided for, e.g. cardiac contractility or left ventricular ejection fraction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/026—Measuring blood flow
- A61B5/0265—Measuring blood flow using electromagnetic means, e.g. electromagnetic flowmeter
- A61B5/027—Measuring blood flow using electromagnetic means, e.g. electromagnetic flowmeter using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/20—Measuring for diagnostic purposes; Identification of persons for measuring urological functions restricted to the evaluation of the urinary system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/40—Detecting, measuring or recording for evaluating the nervous system
- A61B5/4058—Detecting, measuring or recording for evaluating the nervous system for evaluating the central nervous system
- A61B5/4064—Evaluating the brain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/42—Detecting, measuring or recording for evaluating the gastrointestinal, the endocrine or the exocrine systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/7475—User input or interface means, e.g. keyboard, pointing device, joystick
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/003—Navigation within 3D models or images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/75—Determining position or orientation of objects or cameras using feature-based methods involving models
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00694—Aspects not otherwise provided for with means correcting for movement of or for synchronisation with the body
- A61B2017/00699—Aspects not otherwise provided for with means correcting for movement of or for synchronisation with the body correcting for movement caused by respiration, e.g. by triggering
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00694—Aspects not otherwise provided for with means correcting for movement of or for synchronisation with the body
- A61B2017/00703—Aspects not otherwise provided for with means correcting for movement of or for synchronisation with the body correcting for movement of heart, e.g. ECG-triggered
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
- A61B2090/3614—Image-producing devices, e.g. surgical cameras using optical fibre
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/367—Correlation of different images or relation of image positions in respect to the body creating a 3D dataset from 2D images using position information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
- A61B2576/02—Medical imaging apparatus involving image processing or analysis specially adapted for a particular organ or body part
- A61B2576/023—Medical imaging apparatus involving image processing or analysis specially adapted for a particular organ or body part for the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
- A61B2576/02—Medical imaging apparatus involving image processing or analysis specially adapted for a particular organ or body part
- A61B2576/026—Medical imaging apparatus involving image processing or analysis specially adapted for a particular organ or body part for the brain
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Physiology (AREA)
- Pulmonology (AREA)
- Software Systems (AREA)
- Cardiology (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Neurology (AREA)
- Computer Graphics (AREA)
- Signal Processing (AREA)
- Otolaryngology (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Robotics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Neurosurgery (AREA)
- Urology & Nephrology (AREA)
- Psychology (AREA)
- Vascular Medicine (AREA)
- Endocrinology (AREA)
- Gastroenterology & Hepatology (AREA)
Abstract
의료 시스템은 의사가 해부학적 구조 내부 또는 인접한 타겟으로 해부학적 구조의 링크된 통로를 통해 가요성 의료 장치를 항해시킬 수 있도록 의사에게 네비게이션 도움을 제공한다. 이러한 의료 장치가 이러한 링크된 통로를 통해 이동함에 따라, 촬상 소자에 의해 그 말단부에서 이미지가 포착되고 의료장치에 대한 포즈 및 형상 정보가 의료 장치 내부에 배치된 센서로부터 수신된다. 해부학적 구조의 4-D 컴퓨터 모델이 4-D 형상 등록 및 가상 카메라 등록의 하나 또는 모두를 사용하여 의료 장치에 등록되어서, 포착된 이미지 및 가상 카메라의 관점으로부터 생성된 가상 이미지가 서로 등록되고 타겟으로의 네비게이션 경로의 표시를 제공할 때 표시된다.
Description
본 발명은 일반적으로 의료 시스템에 관한 것이고 특히, 영상유도수술을 위한 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템에 관한 것이다.
영상유도수술은 의사가 의료장치를 환자 내부의 타겟에 항해시키도록 도와서 치료 시술 및/또는 진단 시술이 타겟에 행해지도록 할 수 있다. 안내를 위해 의료 장치의 작업 단부의 포즈(즉, 위치 및 방위)는 추적되고 그 이미지가 타겟과 연관된 해부학적 구조의 모델을 따라 표시되거나 해부학적 구조의 모델에 중첩될 수 있다. 이러한 모델은 x선, 초음파, 형광투시법, 컴퓨터 단층촬영장치(CT), 자기 공명 영상(MRI), 및 다른 영상 기술과 같은 수술전 및/또는 수술간 환자 해부학적 스캔 데이터로부터 컴퓨터 생성될 수 있다. 이러한 의료 장치는 내시경, 카테터 또는, 환자의 해부학적 구조 내부의 타겟에 이르는 신체 통로에 일치할 수 있는 유연체(flexible body) 및 조향가능한 팁을 갖는 의료 기기일 수 있다.
치료 및/또는 의료 시술이 시행될 타겟, 이러한 타겟이 존재하거나 인접한 해부학적 구조의 모델 및, 이러한 해주학적 구조의 모델에 중첩된 의료 장치의 작업 단부의 영상은 의사가 의료 장치를 자연 및/또는 인공 신체 통로를 통해, 해부학적 구조로 그리고 해부학적 구조를 통해 타겟으로 안내하도록 돕는데 특히 유용할 수 있다. 그러나, 이러한 모델의 의료 장치로의 적합한 등록은 환자의 폐 또는 박동하는 심장의 경우에서 처럼 해부학적 구조가 부동이 아니고 강성을 갖지도 않고 대신에 해부학적 구조의 주기적 또는 비주기적 이동에 따라 이동하고 및/또는 형상이 변할 때 매우 어려울 수 있다.
따라서, 본 발명의 하나 이상의 특징의 하나의 목적은 영상유도수술을 위해 수술간 해부학적 정보를 가지고 해부학적 구조의 모델을 등록하기 위한 의료 시스템 및 방법을 구현하는 것이다.
본 발명의 하나 이상의 특징의 다른 목적은 구현이 용이하고 고가의 추적 시스템이 필요없는, 영상유도수술을 위해 수술간 해부학적 정보를 가지고 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 및 방법을 구현하는 것이다.
본 발명의 하나 이상의 특징의 다른 목적은 실시간 적용에 적합하고 계산 효율성이 높은, 영상유도수술 동안에 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 및 방법을 구현하는 것이다.
본 발명의 하나 이상의 특징의 다른 목적은 정확한, 영상유도수술 동안 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 및 방법을 구현하는 것이다.
이러한 목적 및 추가 목적은 간략하게 기술된 본 발명의 다양한 특징에 의해 달성되고, 하나의 특징은 해부학적 구조의 컴퓨터 모델의 정보를 저장하는 메모리; 유연체 및 상기 유연체의 길이를 따라 분포된 복수의 센서를 갖고 있는 의료 장치; 및 동일한 시점에서 상기 복수의 센서에 의해 제공된 정보를 사용하여 상기 해부학적 구조의 통로에 배치되어 있는 동안 상기 유연체의 포즈 및 형상을 결정하고 적어도 상기 유연체의 결정된 형상을 상기 해부학적 구조의 컴퓨터 모델에서의 하나 이상의 잠재적인 통로의 형상중 가장 잘 맞는 형상으로 등록하도록 프로그램화된 프로세서를 포함하는 의료 시스템이다.
다른 특징은 해부학적 구조의 컴퓨터 모델을 상기 해부학적 구조의 통로 내부에 배치된 가요성 의료 장치에 등록하기 위한 방법이고, 상기 가요성 의료 장치는 상기 가요성 의료 장치의 길이를 따라 분포된 복수의 센서를 갖고 있고, 상기 방법은, 동일한 시점에 상기 복수의 센서에 의해 제공된 정보를 사용하여 상기 가요성 의료 장치의 현 포즈 및 형상을 결정하는 단계; 및 적어도 상기 가요성 의료 장치의 결정된 형상을 상기 컴퓨터 모델에서의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치함으로써 상기 해부학적 구조의 컴퓨터 모델을 상기 가요성 의료 장치에 등록하는 단계를 포함한다.
다른 특징은 해부학적 구조의 컴퓨터 모델의 정보를 저장하는 메모리; 의료 장치; 상기 의료 장치의 말단부의 관점으로부터 이미지를 포착하기 위한 촬상 장치; 및 상기 해부학적 구조의 통로에 배치되어 있는 동안 상기 의료 장치의 포즈 및 형상을 결정하고 적어도 상기 의료 장치의 결정된 형상을 상기 해부학적 구조의 컴퓨터 모델에서의 하나 이상의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 포괄적인 등록을 주기적으로 실행한 다음, 상기 촬상 장치에 의해 포착된 이미지를 상기 해부학적 구조의 컴퓨터 모델의 복수의 가상 뷰와 비교함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 국부적인 등록을 실행하도록 프로그램화된 프로세서를 포함하고, 상기 복수의 가상 뷰는 가상 카메라의 관점으로부터 생성되고 상기 가상 카메라의 포즈는 초기에 상기 의료 장치의 말단부의 포즈에서 설정된 다음에 초기 포즈에 대해 교란되는 의료 시스템이다.
또 다른 특징은 해부학적 구조의 컴퓨터 모델을 의료 장치에 등록하기 위한 방법으로서, 상기 해부학적 구조의 통로에 배치되어 있는 동안 상기 의료 장치의 포즈 및 형상을 결정하고 적어도 상기 의료 장치의 결정된 형상을 상기 해부학적 구조의 컴퓨터 모델에서의 하나 이상의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 포괄적인 등록을 주기적으로 실행한 다음, 상기 촬상 장치에 의해 포착된 이미지를 상기 해부학적 구조의 컴퓨터 모델의 복수의 가상 뷰와 비교함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 국부적인 등록을 실행하는 단계를 포함하고, 상기 복수의 가상 뷰는 가상 카메라의 관점으로부터 생성되고 상기 가상 카메라의 포즈는 초기에 상기 의료 장치의 말단부의 포즈에서 설정된 다음에 초기 포즈에 대해 교란되는 해부학적 구조의 컴퓨터 모델 등록 방법이다.
본 발명의 다양한 특징의 추가 목적, 특징 및 장점은 다음의 도면과 함께 다음의 상세한 설명으로부터 명백해질 것이다.
도 1은 수동 의료 장치를 포함하는, 본 발명의 특징을 이용한 의료 시스템을 도시하는 도면이다.
도 2는 원격조정 의료 장치를 포함하는, 본 발명의 특징을 이용한, 대안의 의료 시스템을 도시하는 도면이다.
도 3은 환자의 해부학적 구조 내부로 삽입된 의료 장치의 도면이다.
도 4는 환자에게 의료 시술을 행하기 전에 수행되는 수술전 태스트의 순서도이다.
도 5는 호흡 사이클 동안의 폐의 이동을 설명하는 도면이다.
도 6은 의료 장치에 해부학적 구조의 컴퓨터 모델을 등록하기 전의 해부학적 구조 내의 타겟 영역으로의 의료 장치의 네이게이션 동안의 주요 스크린의 도면이다.
도 7은 해부학적 구조 내의 타겟 영역으로의 의료 장치의 네비게이션 동안의 보조 스크린의 도면이다.
도 8은 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제1 방법 및 제2 방법중 하나를 포함하는 의료 시술을 행하기 위한 방법의 순서도이다.
도 9는 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제1 방법의 순서도이다.
도 10은 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제2 방법의 순서도이다.
도 11은 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제1 방법 및 제2 방법 모두를 포함하는 의료 시술을 행하기 위한 방법의 순서도이다.
도 12a 내지 도 12c는 의료 장치가 환자의 해부학적 구조의 통로를 통해 이동할 때의 3개의 상이한 포인트에서 각각 단일 단부 센서를 갖는 의료 장치의 개략도이다.
도 13은 의료 장치가 환자의 해부학적 구조의 통로에 배치되어 있는 동안 단일 시점에서 복수의 분포된 센서를 갖는 의료 장치의 개략도이다.
도 14는 해부학적 구조의 컴퓨터 모델을 의료 장치에 등록한 후의 해부학적 구조의 타겟 영역으로의 의료 장치의 네비게이션 동안의 주요 스크린의 도면이다.
도 15는 본 발명의 특징을 사용하는 의료 시스템에 옵션으로 사용되는 가상 현실 시스템을 도시하는 도면이다.
도 2는 원격조정 의료 장치를 포함하는, 본 발명의 특징을 이용한, 대안의 의료 시스템을 도시하는 도면이다.
도 3은 환자의 해부학적 구조 내부로 삽입된 의료 장치의 도면이다.
도 4는 환자에게 의료 시술을 행하기 전에 수행되는 수술전 태스트의 순서도이다.
도 5는 호흡 사이클 동안의 폐의 이동을 설명하는 도면이다.
도 6은 의료 장치에 해부학적 구조의 컴퓨터 모델을 등록하기 전의 해부학적 구조 내의 타겟 영역으로의 의료 장치의 네이게이션 동안의 주요 스크린의 도면이다.
도 7은 해부학적 구조 내의 타겟 영역으로의 의료 장치의 네비게이션 동안의 보조 스크린의 도면이다.
도 8은 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제1 방법 및 제2 방법중 하나를 포함하는 의료 시술을 행하기 위한 방법의 순서도이다.
도 9는 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제1 방법의 순서도이다.
도 10은 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제2 방법의 순서도이다.
도 11은 의료 장치에 의해 해부학적 구조의 컴퓨터 모델을 등록하기 위한, 본 발명의 특징을 이용한, 제1 방법 및 제2 방법 모두를 포함하는 의료 시술을 행하기 위한 방법의 순서도이다.
도 12a 내지 도 12c는 의료 장치가 환자의 해부학적 구조의 통로를 통해 이동할 때의 3개의 상이한 포인트에서 각각 단일 단부 센서를 갖는 의료 장치의 개략도이다.
도 13은 의료 장치가 환자의 해부학적 구조의 통로에 배치되어 있는 동안 단일 시점에서 복수의 분포된 센서를 갖는 의료 장치의 개략도이다.
도 14는 해부학적 구조의 컴퓨터 모델을 의료 장치에 등록한 후의 해부학적 구조의 타겟 영역으로의 의료 장치의 네비게이션 동안의 주요 스크린의 도면이다.
도 15는 본 발명의 특징을 사용하는 의료 시스템에 옵션으로 사용되는 가상 현실 시스템을 도시하는 도면이다.
도 1은 예를 들어, 조향가능 의료 장치(110), 의료 장치(110)에 삽입되는 하나 이상의 광섬유 케이블(120), 포즈/형상 프로세서(130), 이미지 프로세서(140), 촬상 소자(141), 디스플레이 프로세서(150), 주요 디스플레이 스크린(151), 보조 디스플레이 스크린(152), 네비게이션 프로세서(160) 및 메모리(161)를 포함하는 의료 시스템(100)을 도시하고 있다. 별개의 유닛으로 도시되어 있지만, 포즈/형상 프로세서(130), 이미지 프로세서(140), 디스플레이 프로세서(150), 및 네비게이션 프로세서(160) 각각은 하나 이상의 컴퓨터 프로세서와 상호작용하거나 하나 이상의 컴퓨터 프로세서에 의해 실행되는, 하드웨어, 펌웨어, 소프트웨어 또는 이들의 조합으로서 구현될 수 있다. 주요 디스플레이 스크린(151) 및 보조 디스플레이 스크린(152)는 시스템(100)의 조작자에게 3차원의 이미지를 표시할 수 있는 컴퓨터 모니터일 것이 바람직하다. 그러나, 비용을 감안할 때, 주요 디스플레이 스크린(151) 및 보조 디스플레이 스크린(152)중 어느 하나 또는 모두는 2차원 이미지를 표시할 수 있는 표준 컴퓨터 모니터일 수 있다.
의료 장치(110)는 그 말단부(111)에 유연체(flexible body)(114), 조향가능 팁(112)을 갖고 그 근접 단부(115)에 수동가능 핸들(116)을 갖고 있다. 제어 케이블(도시되지 않음) 또는 다른 제어 수단이 보통 핸들(116)로부터 조향가능 팁(112)으로 뻗어 있어 조향가능 팁(112)이 예를 들어, 구부러진 팁(112)의 점선으로 도시된 바와 같이 제어가능하게 구부러지거나 돌려질 수 있다. 의료 장치(110)는 내시경, 카테터 또는 유연체 및 조향가능 팁을 갖는 다른 의료 기기일 수 있다.
촬상 소자(141)는 이미지 프로세서(140) 및/또는 디스플레이 프로세서(150)에 전송되고 처리되고 주요 디스플레이 스크린(151), 보조 디스플레이 스크린(152) 및/또는 여기에 기술된 바와 같은 본 발명의 다양한 특징에 따른 다른 디스플레이 수단에 표시되는 이미지를 포착하기 위해 촬상 소자(141)의 말단부에 배치된 스테레오스코픽 또는 모노스코픽 카메라일 수 있다. 대안으로, 촬상 소자(141)는 파이버스코프와 같은, 의료 장치(110)의 근접 단부의 이미징 및 프로세싱 시스템에 결합되는 코히어런트 광섬유 번들일 수 있다. 이러한 촬상 소자(141)는 또한 가시 또는 적외선/자외선 스펙트럼에서 이미지 데이터를 포착하는 단일 또는 멀티 스펙트럼일 수 있다. 따라서, 여기에 언급된 임의의 촬상 소자, 장치 또는 시스템은 이러한 이미징 기술 및 다른 이미징 기술의 어느 하나 또는 그 조합일 수 있다. 복수의 광섬유 케이블(120)중 하나는 그 말단부(111)에서의 조명 목적을 위해 그 근접 단부에서 광원(도시되지 않음)에 결합될 수 있다. 광섬유 케이블(120)의 다른 것은 의료 장치(110)의 길이를 따라 분포된 광섬유 브래그 격자와 같은 포지션 및 벤드 또는 형상 센서(또는 레일리 산란을 채용하는 것과 같은 다른 스트레인 센서)로 구성될 수 있어서, 광섬유 케이블을 통과하는 광은 의료 장치(110)의 현 포즈 및 형상을 결정하기 위해 포즈/형상 프로세서(130)에 의해 처리된다.
도 2는 예로서, 핸들(116)이 의료 장치(110)를 원격조정하기 위한 전기기계 인터페이스(170), 제어기(180), 및 입력 장치(190)에 의해 대체된 의료 시스템(100)의 대안의 실시예를 도시하고 있다. 이러한 인터페이스(170)는 의료 장치(110)를 자연 인체 구멍 또는 의사에 의해 생성된 것과 같은 입구 포트를 통해 환자 내로 삽입하거나 환자 밖으로 끌어낼 수 있도록 전체 의료 장치(110)를 전후방으로 이동시키기 위한 구동기는 물론 팁(112)을 조향하기 위해 의료 장치(110) 내부의 케이블을 구동하기 위한 구동기를 포함하고 있다. 제어기(180)는 프로세서(130, 140, 150, 160)와 같은 동일한 하나 이상의 컴퓨터 프로세서 또는 상이한 컴퓨터 프로세서에 하드웨어, 펌웨어 또는 소프트웨어(또는 그 조합)으로서 구현되는 것이 바람직하다. 유연체(114)는 이러한 구현예에서 수동으로 또는 능동으로 구부러질 수 있다.
이러한 조향가능한 의료 장치의 예가 각각 여기에 언급되어 통합된 "Method and System for Assisting an Operator in Endoscopic Navigation" 표제의 U.S. 2010/0249506 Al 및 "Apparatus and Methods for Automatically Controlling an Endoscope" 표제의 WO 2009/097461 Al에 기술되어 있다. 광섬유 브래그 격자를 사용한 내시경의 위치 및 구부림의 결정에 대해서는 예를 들어, 여기에 각각 언급되어 통합된, "Robotic Surgery System Including Position Sensors Using Fiber Bragg Gratings" 표제의 U.S. 2007/0156019 Al, "Fiber Optic Position and/or Shape Sensing Based on Rayleigh Scatter" 표제의 U.S. 2008/0212082 Al, "Robotic Surgical Instrument and Methods using Bragg Fiber Sensors" 표제의 U.S. 2008/0218770 Al, 및 "Fiber Optic Shape Sensor" 표제의 U.S. 2009/0324161 Al에 상세하게 설명되어 있다.
도 3은 예로서, 입구 포트(310)를 통해 삽입되고 환자의 해부학적 구조(330) 내로 뻗은 의료 장치(110)의 도면을 도시하고 있다. 이러한 예에서, 해부학적 구조(330)는 기관, 기관지 및 세기관지를 포함하는 복수의 자연 신체 통로를 갖는 한 쌍의 폐이고, 입구 포트(310)는 환자의 입이고, 의료 장치(110)는 기관지경이다. 이러한 폐의 성질로 인해, 의료 장치(110)는 기관지나무의 수많은 링크된 통로를 통해 안내될 수 있다. 이렇게 하는데 있어서, 의료장치(110)의 유연체(114)는 그것이 이동하는 통로에 일치한다. 한 쌍의 폐가 본 예에서 도시되어 있지만, 본 발명의 다양한 특징이 호흡기 계통에 더하여, 심장, 뇌, 소화기 계통, 순환계 및 비뇨기계와 같은 다른 해부학적 구조에도 적용가능하고 사용될 수 있다는 것을 이해해야 한다. 또한, 단지 자연 신체 통로가 도시되어 있지만, 여기에 기술된 방법은 또한 의료 시술 동안 또는 그 이전에 형성될 수 있고 환자 해부학 구조의 컴퓨터 모델에 중첩될 수 있는 인공 또는 의사가 생성한 통로에도 적용가능하다.
도 4는 예로서, 환자에게 의료 시술을 위해 준비되어 실행되는 수술전 태스트의 순서도이다. 다음의 예에서, 해부학적 구조는 공기 및 혈액 순환계의 주기적 운동 또는 자극에 대한 신체 응답과 같은 비주기적 운동과 같은 식별가능한 방식으로 의료 시술 동안 이동하는 것으로 간주된다. 본 발명의 특징이 해부학적 구조가 의료 시술 동안 이동하지 않을 때도 적용가능하고 유용하지만, 본 발명의 온전한 장점은 해부학적 구조가 의료 시술 동안 식별가능하거나 공지된 방식으로 이동하는 환경에서 최상으로 얻어진다.
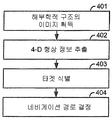
블록 401에서, 환자의 하나 이상의 이미지가 해부학적 구조의 3차원(3-D) 컴퓨터 모델의 세트가 발생될 수 있는 적합한 이미징 기술을 사용하여 획득되고, 각 3-D 컴퓨터 모델은 임의의 시간 동안 상이한 시점과 연관되어 있어서 시간은 4차원을 나타내고 이러한 이미지는 여기에서 4차원(4-D) 이미지로 불린다. 또한 추가 차원이 여기에 기술된 방법에서 정의될 수 있고 사용될 수 있다. 이러한 이미징 기술의 예는 형광투시법, 자기 공명 영상, 서모그래피, 단층촬영, 초음파, 광단층 촬영(Optical Coherence Tomography), 열 사진법, 임피던스 이미징, 레이저 이미징, 나노튜브 X선 이미징등을 포함하지만 이제 제한되는 것은 아니다.
이미지가 포착되는 시간은 관심의 해부학적 구조 및 운동에 따라 다르다. 예를 들어, 해부학적 구조가 폐일 때, 하나의 세트의 이미지는 폐가 최대 배출 상태(501)(실선)로부터 최대 흡입 상태(502)(점선)로 확장되는 도 5에 도시된 호흡 사이클과 같은 주기적 운동에 대한 것일 수 있다. 다른 세트의 이미지는 폐의 운동을 유발하는 기침이나 자극에 대한 다른 신체 반응과 같은 비주기적 운동에 대한 것일 수 있다. 다른 예로서, 해부학적 구조가 심장일 때, 하나의 세트의 이미지는 혈액 순환 사이클과 같은 주기적 운동에 대한 것일 수 있다. 이러한 3-D 컴퓨터 모델의 수를 결정하는 샘플링 레이트가 선택되어 이러한 운동의 주기 동안 해부학적 구조의 이동은 정확한 등록 및 네비게이션 목적을 위해 충분히 기술된다.
블록 402에서, 4-D 형상 정보가 획득된 해부학적 구조의 이미지로부터 추출된다. 이러한 획득된 이미지가 운동의 주기 동안 (예를 들어, 샘플링 레이트에 따른) 증분된 시점에서 샘플링된 해부학적 구조의 2차원(2-D) 슬라이스의 세트일 때, 해부학적 구조에 대한 3-D 형상 정보가 동일한 시점에 상응하는 2-D 슬라이스의 각 세트에 대해 발생된다. 따라서, n개의 시점에 대해, "n" 개의 세트의 3-D 형상 정보가 추출되는데, 여기에서, "n"은 운동 주기 동안 샘플링 시점의 수이다.
블록 403에서, 하나 이상의 타겟이 해부학적 구조에서 식별된다. 이러한 타겟은 의료 시술이 실행될 해부학적 구조 내부의 또는 인접한 위치 또는 대상이다. 예를 들어, 이러한 타겟은 해부학적 구조 내부 또는 인접한 종양일 수 있다. 이러한 타겟은 추출된 4-D 형상 정보 또는 해부학적 구조의 획득된 이미지의 분석에 의해 종래의 방식으로 의사에 의해 식별될 수 있는데, 어느 것이든 이러한 식별을 위해 보다 편리하고 및/또는 신뢰할만하다.
블록 404에서, 의료 장치(110)의 작업 단부가 각 타겟으로 이동하기 위해 해부학적 구조에 그리고 해부학적 구조를 통해 네비게이션 통로가 결정된다. 이러한 경우에, 이러한 작업 단부는 의료 장치(110)의 말단부(111)인 것으로 가정한다. 의사는 최단 시간 및/또는 최단 경로는 물론 의료 장치(110)가 타겟쪽으로 이동할 때 유발할 수 있는 환자에 대한 임의의 피해를 고려하기 위해 추출된 4-D 형상 정보 또는 해부학적 구조의 포착된 이미지를 분석함으로써 타겟으로의 적합한 네비게이션 경로를 결정할 수 있다. 대안으로, 컴퓨터 프로그램에 의해 프로세서는 인공지능 기술을 사용하여 네비게이션 경로를 결정하기 위해 이러한 분석을 실행할 수 있다.
도 6은 예로서, 해부학적 구조의 컴퓨터 모델을 의료 장치에 등록하기 전에 해부학적 구조 내부의 타겟 에어리어로의 의료 장치(110)의 네비게이션 동안의 주요 스크린(151)의 뷰를 도시하고 있다. 좌측 이미지(610)는 폐 내부의 가지를 보는 동안 촬상 소자(141)에 의해 포착된 이미지이고, 여기에서 이러한 가지는 하나 또는 다른 의료 장치(110)가 폐 내부로 더 삽입될 때 통과할 수 있는 좌측 통로(611) 및 우측 통로(612)를 나타낸다. 또한 4-D 컴퓨터 모델이 의료 장치(110)에 임의의 방식으로 등록되기 전에 도 4의 블록 402에서 추출된 4-D 형상 정보로부터 발생된 해부학적 구조의 4-D 컴퓨터 모델에서의 상응하는 위치를 보는 가상 카메라에 의해 발생된 가상 이미지인 우측 이미지(620)가 도시되어 있다. 특히, 통로(611) 및 통로(612)에 상응하는 좌측 통로(621) 및 우측 통로(622)가 도시되어 있지만, 이들의 크기 및 정렬은 의료 장치(110)로의 해부학적 구조의 4-D 컴퓨터 모델과 관련된 등록 변환에서의 전환 및 회전 에러로 인하여 상이하다.
도 7은 예로서, 해부학적 구조 내부의 타겟 에어리어로의 의료 장치(110)의 네비게이션 동안의 보조 스크린(152)의 뷰를 도시하고 있다. 이러한 뷰는 의료 장치(110)의 컴퓨터 모델(710) 및 해부학적 구조(330)의 컴퓨터 모델(720)의 2-D 또는 3-D 뷰일 수 있는데, 이러한 뷰는 의료 장치(110)가 해부학적 구조(330)를 통과하여 이동함에 따라 실시간으로 갱신된다. 또한 타겟의 표시(721)가 도시되어 있다. 따라서, 보조 스크린(152)은 의사가 의료 장치(110)를 해부학적 구조(330)를 통하여 타겟으로 조향시키도록 돕는다.
도 8은 예로서, 환자에게 의료 시술을 행하기 위한 방법의 순서도이다. 블록 801에서, 다수의 수술전 태스크가 실행되어 의료 시술의 실행을 준비한다. 먼저, 의료 장치(110)는 예를 들어, 고정된 기준 프레임 내의 공지되고 정지된 포인트에 의료 장치(110)의 말단부(111)를 터치함으로써 종래 방식으로, 고정된 기준 프레임에 국부화된다. 두번째로, 환자는 환자의 하나 이상의 포인트에 의료 장치(110)의 말단부(111)를 터치하고 유지함으로써 종래의 방식으로, 고정된 기준 프레임에 등록될 수 있는데, 이러한 포인트는 4-D 컴퓨터 모델과 연관된 운동의 주기 동안, 도 4의 블록 401에 기술된 바와 같은 환자의 획득된 이미지 위의 식별가능한 포인트에 상응한다. 따라서, 환자 위의 하나 이상의 포인트 사이의 공지된 관계를 해부학적 구조(330)에 적용함으로써, 해부학적 구조의 컴퓨터 모델은 환장의 해부학적 구조, 고정된 기준 프레임 및 의료 장치(110)에 등록될 수 있다.
타겟으로의 해부학적 구조(330)의 링크된 통로를 통한 의료 장치(110)의 네비게이션은 도 8의 시작으로부터 종료까지 실행된다. 블록 802에서, 의료 장치(110)는 의사에 의해 사용되고 있는 의료 시스템(100)의 구현에 따라, 핸들(116) 또는 입력 장치(190)를 조작하는 의사에 의해 삽입 또는 수축 방향으로, 링크된 통로를 통해 이동된다. 블록 803에서, 네비게이션 프로세서(160)는 포즈/형상 프로세서(130)로부터 의료 장치(110)에 대한 포즈 및 형상 정보를 수신하고 이미지 프로세서(140)로부터 이미지 데이터를 수신한다. 따라서, 네비게이션 프로세서(160)는 해당 시각에 촬상 소자(141)에 의해 포착된 이미지를 따른 의료 장치(110)의 유연체(114)의 형상 및 의료 장치(110)의 말단부(111)의 현 위치 및 방위(즉, 포즈)에 대한 정보를 갖고 있다.
블록 804에서, 네비게이션 프로세서(160)는 의료 장치(110)로의 해부학적 구조(330)의 4-D 컴퓨터 모델의 등록을 보정한다. 이러한 등록을 실행하기 위한 하나의 방법은 도 9를 참조하여 기술되어 있고 다른 방법은 도 10을 참조하여 기술되어 있다. 대안으로, 이러한 2개의 방법중 하나 또는 다른 하나를 실행하지 않고 도 11을 참조하여 도시되고 기술된 바와 같이 양측 방법 모두를 실행할 수 있다. 블록 804을 실행하는데 있어서, 의료 장치(110)의 형상은 해당 시각에 의료 장치(110)가 배치된 해부학적 구조의 통로의 형상과 일치하는 것으로 가정한다. 따라서, 의료 장치(110)로의 컴퓨터 모델의 등록에 의해 해부학적 구조의 컴퓨터 모델을 환장의 실제 해부학적 구조에 효과적으로 등록시킬 수 있다.
블록 805에서, 해부학적 구조(330)의 4-D 컴퓨터 모델의 의료 장치(110)로의 적합한 등록으로 인해, 도 14에 도시된 바와 같이, 가상 이미지(620)가 포착된 이미지(610)의 것과 닮도록 이제 조정된 것을 제외하곤 도 6을 참조하여 도시되고 기술된 것과 유사한 방식으로 이러한 포착된 이미지 및 가상 이미지가 표시되어 있다. 특히, 가상 이미지(620)의 좌측 통로(621) 및 우측 통로(622)의 크기 및 방위는 포착된 이미지(610)의 좌측 통로(611) 및 우측 통로(612)의 것과 매치한다. 블록 806에서, 가상 이미지(620) 내부의 화살표(623)와 같은 네비게이션 경로 표시가 제공되어 의사는 의료 장치(110)가 표시된 통로 내부로 조향될 것을 알게 된다.
블록 807에서, 의료 장치(110)의 작업 단부(111)가 타겟에 대해 임계 거리 내에 도달하였는지에 대해 판정한다. 이러한 경우에서 임계 거리는 해부학적 구조(330) 내부로 의료 장치(110)를 추가 삽입할 필요없이 그 의도된 목적을 실행하도록 의사에 의해 의료 장치(110)의 작업 단부(111)가 조작될 수 있기에 충분한 거리이다. 807에서 판정이 YES라면, 타겟으로의 안내된 네비게이션은 완료되고 방법은 종료된다. 한편, 의료 장치(110)가 타겟에 대한 임계 거리에 도달하지 못하였다면, 방법은 802로 가서, 의사에 사용되고 의료 시스템(100)의 구현에 따라, 입력 장치(190) 또는 핸들(116)을 조작하는 의사에 의해, 링크된 통로를 통해 의료 장치(110)가 추가 이동된다.
도 9는 예로서, 해부학적 구조의 컴퓨터 모델을 의료 장치와 함께 등록하기 위한 네비게이션 프로세서(160)에 의해 실행가능한 ("형상 등록"으로 불리는) 제1 방법의 순서도를 설명하고 있다. 이러한 방법은 특히, 촬상 소자(141)가 제거되거나 그 뷰가 차단된 때와 같이, 실시간 이미지가 의료 장치(110)의 관점에서 유용하지 않은 때에 특히 유용하다.
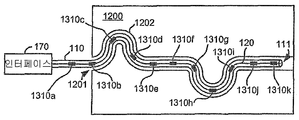
이전에 설명된 바와 같이, 유연체(114)는 의료 장치(110)가 해당 시각에 통과하고 있는 해부학적 구조의 통로의 형상과 일치하기 때문에, 의료 장치(110)의 형상은 통로의 형상과 유사하다. 따라서, 해부학적 구조의 컴퓨터 모델을 의료 장치(110)에 등록함으로써, 이것은 해부학적 구조의 컴퓨터 모델을 실제 해부학적 구조에 등록하는 것과 동일한 효과를 얻는다. 대안으로, 통로의 형상은 의료 장치(110)가 해부학적 구조(1200)의 통로(1202)를 통하여 이동함에 따라 말단부 센서(1210)의 포즈가 상이한 시점에 기록되는, 도 12a 내지 도 12c를 참조하여 기술된 바와 같은 접근법을 사용하여 결정될 수도 있다. 하지만, 이러한 접근법의 하나의 문제점은 해부학적 구조(1200)가 이동하고 있을 때, 상이한 시점(해부학적 구조의 동적 이동의 상이한 시점일 수도 있다)에서 이루어진 상이한 위치 측정이 에러 또는 복잡한 보정의 조정에 이를 수 있다는 것이다. 따라서, 본 발명의 바람직한 실시예는 모든 포즈 및 형상 측정이 동일한 시점에서 정확하게 이루어질 수 있도록 그 수가 충분하고 의료 장치(110)의 길이를 따라 적합하게 분포된 복수의 센서(1310a-1310k)가 채용되는 도 13에 도시되어 있다.
블록 901에서, 의료 장치(110)의 현 포즈 및 형상에 상응하는 3-D 컴퓨터 모델이 포즈/형상 프로세서(130)로부터 수신된 포즈 및 형상 정보를 사용하여 생성된다. 이러한 포즈 및 형상 정보는 의료 장치(110) 내부에 배치된 위치 및 형상 센서로부터 용이하게 생성되기 때문에, 의료 장치의 포즈 및 형상의 계산적 판정이 신속하게 이루어진다.
블록 902에서, 의료 장치(110)의 형상은 링크된 통로의 가장 가까운 매치를 찾기 위해 각 샘플링된 시점에 대한 3-D 컴퓨터 모델의 링크된 통로의 형상과 비교된다. 예를 들어, 여기에 언급되어 통합된, U.S. 2005/0182319 A1에 기술된 바와 같은 Iterative Closest Point (ICP) 알고리즘 또는 Singular Value Decomposition (SVD) 알고리즘과 같은 다수의 주지된 매칭 기술이 이러한 기능을 실행하기 위해 사용될 수 있다. 따라서, 동적 모션 사이클의 각 샘플 시간에 대해, 의료 장치(110)의 현 형상(그리고 그 시각에 의료 장치(110)가 배치된 통로)와 해부학적 구조의 컴퓨터 모델에서의 링크된 통로중 하나와의 가장 가까운 매치가 결정된다.
블록 903에서, 의료 장치(110)의 형상과 902에서 결정된 링크된 통로의 각 가장 가까운 매치 사이의 편차가 결정된다. 그다음, 의료 장치(110)의 현 형상과 최소 편차를 갖고 있는 링크된 통로의 가장 가까운 매치가 이러한 매치들 중에 "가장 잘 맞는 것(best fit)"인 것으로 결정된다. 따라서, 블록 902는 각 3-D 컴퓨터 모델에 대해, 의료 장치의 현 형상과의 하나 이상의 컴퓨터 모델의 통로 사이의 가장 가까운 매치를 결정하고, 블록 903은 모든 3-D 컴퓨터 모델의 가장 가까운 매치중 "가장 잘 맞는 것"(즉, 가장 가까운 매치)인 링크된 통로의 가장 가까운 매치를 갖는 3-D 컴퓨터 모델을 결정한다. 그다음, 904에서, 해부학적 구조의 4-D 컴퓨터 모델의 링크된 통로의 "가장 잘 맞는 것"이 "가장 잘 맞는 것"으로 판정된 의료 장치(110)의 부분으로 국부화되어서, 이러한 4-D 컴퓨터 모델은 의료 장치(110) (그리고, 결과적으로, 환자의 해부학적 구조)에 등록된다.
도 10은 예로서, 의료 장치로의 해부학적 구조의 컴퓨터 모델의 등록을 보정하기 위해 네비게이션 프로세서에 의해 실행가능한 ("가상 카메라 등록"으로 불리는) 제2 방법의 순서도를 설명하고 있다. 이러한 방법을 실행하는데 있어서, (도 8의 초기에 블록 801에서와 같이) 4-D 컴퓨터 모델과 의료 장치(110)의 종래 등록이 실행된 것으로 가정한다.
블록 1001에서, 처음에 가상 카메라가 의료 장치(110)의 말단부의 현 포즈에 배치된 것으로 가정한다. 블록 1002에서, 해부학적 구조의 4-D 컴퓨터 모델의 하나 이상의 가상 이미지가 가상 카메라의 현 포즈를 전환 및/또는 방위 측면에서 교란시킴으로써 가상 카메라에 의해 포착된 것처럼 생성된다. 블록 1003에서, 이러한 하나 이상의 가상 이미지가 촬상 소자(141)에 의해 포착된 해부학적 구조의 현 이미지와 비교된다. 블록 1004에서, 가상 카메라 포즈가 블록 1003에서 실행된 비교에 따라 조정되어서, 조정된 포즈에서 가상 카메라에 의해 포착된 가상 이미지가 촬상 소자(141)에 의해 포착된 해부학적 구조의 현 이미지와 보다 더 잘 매치시킨다. 블록 1005에서, 4-D 컴퓨터 모델의 가상 이미지가 조정된 포즈에서 가상 카메라에 의해 포착된 것처럼 생성된다. 블록 1006에서, 조정된 포즈에서 가상 카메라에 의해 포착된 가상 이미지는 촬상 소자(141)에 의해 포착된 해부학적 구조의 현 이미지와 비교된다. 블록 1007에서, 가상 이미지와 실제 포착된 이미지 사이의 편차가 허용 오차 내에 있는지 판정한다. 이러한 허용 오차는 적당한 기간에 수용가능한 매치를 얻기 위해 임의의 방식으로 이전에 결정된 값을 제한하도록 사전 설정될 수 있다. 대안으로, 알고리즘은 블록 1002-1007의 루프를 통한 처리의 결과의 함수로서 초기 허용 오차를 증분하여 변경하도록 사용될 수 있다.
판정이 YES라면, 1008에서, 가상 카메라의 조정된 포즈가 해부학적 구조의 4-D 컴퓨터을 의료 장치(110)에 등록하도록 등록 변형을 생성하는데 사용되고, 이러한 등록 변형은 4-D 컴퓨터 모델을 의료 장치(110)에 국부화하도록 사용된다. 한편, 판정이 NO라면, 가상 카메라의 조정된 포즈를 교란시킴으로써 가상 카메라의 관점에서 해부학적 구조의 4-D 컴퓨터 모델의 하나 이상의 가상 이미지를 생성하기 위해 방법이 블록 1002로 되돌아간다. 그다음, 이러한 방법은 블록 1007에서 판정이 YES일 때까지 블록 1002-1007을 계속 순환한다.
도 11은 예로서, 의료 장치에 해부학적 구조의 컴퓨터 모델을 등록하기 위해 제1 및 제2 방법 모두를 포함하는 의료 시술을 실행하기 위한 방법의 순서도를 설명하고 있다. 이러한 방법에서, 블록 1101-1103은 도 8의 블록 801-803과 동일하게 실행되고 블록 1106-1108은 도 8의 블록 805-807과 동일하게 실행된다. 블록 1104은 도 9을 참조하여 설명된 방법과 동일하게 실행되고, 비교적 고속 실행되는 포괄적인 또는 거친 등록으로 생각될 수 있다. 블록 1105는 도 10을 참조하여 설명된 방법과 동일하게 실행되고, 블록 1104의 실행후에 남아 있을 수 있는 임의의 "잔류 에러"를 보정하는 국부 또는 정교한 등록으로 생각될 수 있다. 따라서, 이러한 예에서, 도 9 및 도 10을 참조하여 설명된 방법의 조합을 주기적으로 실행함으로써 의료 장치(110)에 해부학적 구조의 4-D 컴퓨터 모델을 보다 정확하게 등록시킬 수 있다. 또한, 블록 1104의 포괄적인 등록을 주기적으로 실행함으로써 도 8의 블록 801과 같은 초기 등록 후에 블록 1105를 단지 주기적으로 실행함으로써 얻을 수 있는 임의의 "표류(drift)" 에러를 차단하는 기능을 얻을 수 있다.
여기에 기술된 등록 방법중 어느 하나를 실행한 후에, 최종 가상 이미지(620)가 여전히 (주요 디스플레이 스크린(151)에서 보여지는 것처럼) 포착된 이미지(610)와 시각적으로 오정렬되어 있다면, 수동 등록 수단이 제공되어 가상 이미지와 포착된 이미지가 정렬된 것으로 나타날 때까지 컴퓨터 모델을 입력 장치의 운전자 조작에 따라 변환시키고 및/또는 방위지정할 수 있다.
도 15은 예로서, 환자 내부의 해부학적 구조 내부의 또는 인접한 타겟에 대한 가상 현실 환경에서 의사에게 네비게이션 안내를 제공하기 위한 의료 시스템(100)에 옵션으로 사용되는 가상 현실 시스템(1500)을 설명하고 있다. 가상 현실 시스템(1500)에서, 의사에 의해 착용된 입체 고글 또는 안경(1501)은 의사가 해부학적 구조를 통해 의료 장치(110)를 이동시킴에 따라 촬상 소자(141)에 의해 포착된 실시간 이미지 또는 가상 카메라에 의해 생성된 가상 이미지를 3-D로 표시한다. 의사가 해부학적 구조의 링크된 통로에서 각 가지에 접근함에 따라, 취해지는 네비게이션 경로의 표시가 하나 이상의 감각 양식으로 제공될 수 있다. 예를 들어, 네비게이션 프로세서(160)는 도 8을 참조하여 설명된 바와 같이 단계 801-805를 실행할 수 있지만, 주요 디스플레이 스크린(151) 위의 가상 이미지(620)에 화살표를 표시하는 대신에, 의사가 정확한 네비게이션 경로의 시각적인 표시를 받도록 (디스플레이 프로세서(150)를 통해) 입체 안경(1501)에서 취해지는 정확한 통로를 표시하는 화살표로서 네비게이션 표시를 제공할 수 있다.
대안으로 또는 추가적으로, 네비게이션 통로 표시는 의사가 잘못된 경로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 들리는 경고 소리 및/또는 의사가 정확한 통로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 들리는 보증 소리에 의해 의료 장치(110)가 가지에 접근할 때 청각 시스템(1502)을 통해 제공될 수 있다. 대안으로 또는 추가적으로, 네비게이션 통로 표시는 의사가 잘못된 경로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 나는 악취 및/또는 의사가 정확한 통로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 드리는 상쾌한 냄새에 의해 의료 장치(110)가 가지에 접근할 때 후각 시스템(1503)을 통해 제공될 수 있다. 네비게이션 통로 표시는 의사가 잘못된 경로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 의사의 입에 삽입되는 마우스피스(1515)에서 감지되는 쓴 맛 및/또는 의사가 정확한 통로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 이러한 마우스피스(1515)에서 감지되는 단 맛에 의해 의료 장치(110)가 가지에 접근할 때 미각 시스템(1504)을 통해 제공될 수 있다. 네비게이션 통로 표시는 의사가 잘못된 경로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 입력 장치(190)에서 느껴지는 저항력 및/또는 의사가 정확한 통로에 들어가려고 의료 장치(110)의 말단부(111)를 지향시키는 경우에 입력 장치(190)에서 느껴지는 순방향 미는 힘(forward nudging force)에 의해 의료 장치(110)가 가지에 접근할 때 촉각 시스템(1505)을 통해 제공될 수 있다.
본 발명의 다양한 특징이 하나 이상의 실시예에 대해 설명되었지만, 본 발명은 첨부된 청구범위에 의해 보호된다는 것을 이해할 것이다.
Claims (36)
- 의료 시스템으로서,
해부학적 구조의 컴퓨터 모델의 정보를 저장하는 메모리;
유연체 및 상기 유연체의 길이를 따라 분포된 복수의 센서를 갖고 있는 의료 장치; 및
동일한 시점에서 상기 복수의 센서에 의해 제공된 정보를 사용하여 상기 해부학적 구조의 통로에 배치되어 있는 동안 상기 유연체의 포즈 및 형상을 결정하고 적어도 상기 유연체의 결정된 형상을 상기 해부학적 구조의 컴퓨터 모델에서의 하나 이상의 잠재적인 통로의 형상중 가장 잘 맞는 형상으로 등록하도록 프로그램화된 프로세서를 포함하는 것을 특징으로 하는 의료 시스템. - 제1항에 있어서, 상기 메모리는 상기 해부학적 구조 내부의 타겟으로의 상기 컴퓨터 모델에 대해 네비게이션 경로의 정보를 저장하고, 상기 프로세서는 상기 컴퓨터 모델을 상기 의료 장치에 등록한 후에 상기 네비게이션 경로의 표시를 상기 의료 장치에 대한 조향 방향으로서 제공하도록 프로그램화된 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서, 디스플레이를 더 포함하고,
상기 프로세서는 상기 의료 장치의 말단부의 관점으로부터 상기 해부학적 구조의 내부의 컴퓨터 모델에 가상 뷰를 생성하고 상기 디스플레이에 상기 생성된 가상 뷰 및 상기 네비게이션 경로의 표시를 표시하도록 프로그램화된 것을 특징으로 하는 의료 시스템. - 제3항에 있어서, 상기 의료 장치의 말단부의 관점에서 이미지를 포착하기 위한 촬상 장치를 더 포함하고,
상기 프로세서는 상기 디스플레이에 상기 포착된 이미지를 표시하도록 프로그램화된 것을 특징으로 하는 의료 시스템. - 제2항에 있어서, 가상 현실 환경을 더 포함하고,
상기 프로세서는 상기 의료 장치의 말단부의 관점으로부터 상기 해부학적 구조의 내부의 가상 현실 환경에 가상 뷰를 생성하고 상기 네비게이션 경로의 하나 이상의 감각 표시를 따라 상기 생성된 가상 뷰의 하나 이상의 감각 표시를 제공하도록 프로그램화된 것을 특징으로 하는 의료 시스템. - 제5항에 있어서, 상기 네이게이션 경로의 하나 이상의 감각 표시는 청각, 시각, 촉각, 후각 및 미각의 오감중 하나 이상을 포함하는 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서, 상기 복수의 센서는 복수의 변형 센서(strain sensor)인 것을 특징으로 하는 의료 시스템.
- 제7항에 있어서, 상기 복수의 센서는 레일리 산란(Rayleigh scattering)을 채용하는 센서를 포함하는 것을 특징으로 하는 의료 시스템.
- 제7항에 있어서, 상기 의료 장치는 상기 유연체를 통해 뻗은 하나 이상의 광섬유를 갖고 있고 상기 복수의 센서는 상기 하나 이상의 광섬유에 광섬유 브래그 격자를 채용하는 센서를 포함하는 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서, 상기 해부학적 구조는 폐이고 상기 하나 이상의 잠재적인 통로는 기관, 기관지 및 세기관지를 포함하는 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서, 상기 해부학적 구조는 심장, 뇌, 소화기 계통, 순환계 및 비뇨기계중 하나인 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서,
입력 장치;
상기 의료 장치에 결합된 하나 이상의 구동기를 더 포함하고,
상기 프로세서는 상기 하나 이상의 구동기가 상기 입력 장치의 운전자 이동에 응답하여 상기 의료 장치를 이동시키도록 명령하기 위해 프로그램화된 것을 특징으로 하는 의료 시스템. - 제2항에 있어서, 상기 의료 장치는 내시경, 카테터 및 의료 기기중 하나를 포함하는 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서, 상기 프로세서는 상기 해부학적 구조의 운동을 식별하고 상기 식별된 운동에서의 포인트와 연관된 트리거를 채용함으로써 상기 해부학적 운동을 보상하도록 프로그램화된 것을 특징으로 하는 의료 시스템.
- 제14항에 있어서, 상기 운동은 상기 해부학적 구조와 연관된 주기적 운동 및 비주기적 운동의 하나 또는 조합인 것을 특징으로 하는 의료 시스템.
- 제15항에 있어서, 상기 주기적 운동은 공기 및 혈액중 적어도 하나의 신체 내부에서의 순환을 포함하는 것을 특징으로 하는 의료 시스템.
- 제15항에 있어서, 상기 비주기적 운동은 자극에 대한 신체 반응으로부터 나타나는 것을 특징으로 하는 의료 시스템.
- 제2항에 있어서, 상기 메모리는 상기 해부학적 구조의 복수의 컴퓨터 모델의 정보를 저장하고, 상기 복수의 컴퓨터 모델의 각각은 상기 해부학적 구조의 운동의 주기의 상이한 시점에 상응하고, 상기 프로세서는 적어도 상기 유연체의 상기 결정된 형상을 상기 해부학적 구조의 복수의 컴퓨터 모델에서의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치시킴으로써 상기 컴퓨터 모델을 상기 의료 장치에 등록하도록 프로그램화된 것을 특징으로 하는 의료 시스템.
- 제18항에 있어서, 상기 운동의 주기는 식별가능한 주기적 운동 및 식별가능한 비주기적 운동중 적어도 하나와 연관된 것을 특징으로 하는 의료 시스템.
- 제19항에 있어서, 상기 식별가능한 주기적 운동은 공기 및 혈액중 적어도 하나의 신체내 순환을 포함하는 것을 특징으로 하는 의료 시스템.
- 제19항에 있어서, 상기 식별가능한 비주기적 운동은 자극에 대한 신체 반응으로부터 얻어지는 것을 특징으로 하는 의료 시스템.
- 해부학적 구조의 컴퓨터 모델을 상기 해부학적 구조의 통로 내부에 배치된 가요성 의료 장치에 등록하기 위한 방법으로서,
상기 가요성 의료 장치는 상기 가요성 의료 장치의 길이를 따라 분포된 복수의 센서를 갖고 있고, 상기 방법은,
동일한 시점에 상기 복수의 센서에 의해 제공된 정보를 사용하여 상기 가요성 의료 장치의 현 포즈 및 형상을 결정하는 단계; 및
적어도 상기 가요성 의료 장치의 결정된 형상을 상기 컴퓨터 모델에서의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치함으로써 상기 해부학적 구조의 컴퓨터 모델을 상기 가요성 의료 장치에 등록하는 단계를 포함하는 것을 특징으로 하는 해부학적 구조의 컴퓨터 모델 등록 방법. - 의료 시스템으로서,
해부학적 구조의 컴퓨터 모델의 정보를 저장하는 메모리;
의료 장치;
상기 의료 장치의 말단부의 관점으로부터 이미지를 포착하기 위한 촬상 장치; 및
상기 해부학적 구조의 통로에 배치되어 있는 동안 상기 의료 장치의 포즈 및 형상을 결정하고 적어도 상기 의료 장치의 결정된 형상을 상기 해부학적 구조의 컴퓨터 모델에서의 하나 이상의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 포괄적인 등록을 주기적으로 실행한 다음, 상기 촬상 장치에 의해 포착된 이미지를 상기 해부학적 구조의 컴퓨터 모델의 복수의 가상 뷰와 비교함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 국부적인 등록을 실행하도록 프로그램화된 프로세서를 포함하고,
상기 복수의 가상 뷰는 가상 카메라의 관점으로부터 생성되고 상기 가상 카메라의 포즈는 초기에 상기 의료 장치의 말단부의 포즈에서 설정된 다음에 초기 포즈에 대해 교란되는 것을 특징으로 하는 의료 시스템. - 제23항에 있어서, 디스플레이를 더 포함하고, 상기 메모리는 상기 해부학적 구조 내부의 타겟으로의 네비게이션 경로의 정보를 저장하고, 상기 프로세서는 상기 해부학적 구조의 컴퓨터 모델의 주기적으로 실행된 포괄적인 등록 및 국부적인 등록을 사용하여 상기 해부학적 구조의 보정된 가상 뷰를 생성하고 상기 디스플레이에 상기 포착된 이미지, 상기 보정된 가상 뷰 및 상기 네비게이션 경로의 표시를 표시하도록 프로그램화된 것을 특징으로 하는 의료 시스템.
- 제24항에 있어서, 상기 프로세서는 상기 포착된 이미지 및 상기 보정된 가상 뷰를 인접한 창들에서 표시하고 상기 보정된 가상 뷰에서 취해지는 방향을 나타내는 화살표로서 상기 네비게이션 경로의 표시를 상기 디스플레이에 표시하도록 프로그램화된 것을 특징으로 하는 의료 시스템.
- 제24항에 있어서,
입력 장치; 및
상기 입력 장치에 결합된 하나 이상의 구동기를 더 포함하고,
상기 프로세서는 상기 하나 이상의 구동기가 상기 입력 장치의 운전자 이동에 응답하여 상기 의료 장치를 이동시키도록 명령하기 위해 프로그램화된 것을 특징으로 하는 의료 시스템. - 제23항에 있어서, 상기 의료 장치는 내시경, 카테터 및 의료 기기중 하나를 포함하는 것을 특징으로 하는 의료 시스템.
- 제23항에 있어서, 상기 프로세서는 상기 해부학적 구조의 운동을 식별하고 상기 식별된 운동에서의 포인트와 연관된 트리거를 채용함으로써 상기 해부학적 운동을 보상하도록 프로그램화된 것을 특징으로 하는 의료 시스템.
- 제28항에 있어서, 상기 운동은 상기 해부학적 구조와 연관된 주기적 운동 및 비주기적 운동의 하나 또는 조합인 것을 특징으로 하는 의료 시스템.
- 제29항에 있어서, 상기 주기적 운동은 공기 및 혈액중 적어도 하나의 신체 내부에서의 순환을 포함하는 것을 특징으로 하는 의료 시스템.
- 제29항에 있어서, 상기 비주기적 운동은 자극에 대한 신체 반응으로부터 나타나는 것을 특징으로 하는 의료 시스템.
- 제23항에 있어서, 상기 메모리는 상기 해부학적 구조의 복수의 컴퓨터 모델의 정보를 저장하고, 상기 복수의 컴퓨터 모델의 각각은 상기 해부학적 구조의 운동의 주기의 상이한 시점에 상응하고, 상기 프로세서는 적어도 상기 유연체의 상기 결정된 형상을 복수의 컴퓨터 모델에서의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치시킴으로써 상기 컴퓨터 모델을 상기 의료 장치에 등록하도록 프로그램화되어 있고, 상기 복수의 가상 뷰를 생성하기 위한 프로세서에 의해 사용된 컴퓨터 모델은 상기 매치된 통로에 상응하는 컴퓨터 모델인 것을 특징으로 하는 의료 시스템.
- 제32항에 있어서, 상기 운동의 주기는 식별가능한 주기적 운동 및 식별가능한 비주기적 운동중 적어도 하나와 연관된 것을 특징으로 하는 의료 시스템.
- 제33항에 있어서, 상기 식별가능한 주기적 운동은 공기 및 혈액중 적어도 하나의 신체내 순환을 포함하는 것을 특징으로 하는 의료 시스템.
- 제33항에 있어서, 상기 식별가능한 비주기적 운동은 자극에 대한 신체 반응으로부터 얻어지는 것을 특징으로 하는 의료 시스템.
- 해부학적 구조의 컴퓨터 모델을 의료 장치에 등록하기 위한 방법으로서,
상기 해부학적 구조의 통로에 배치되어 있는 동안 상기 의료 장치의 포즈 및 형상을 결정하고 적어도 상기 의료 장치의 결정된 형상을 상기 해부학적 구조의 컴퓨터 모델에서의 하나 이상의 잠재적인 통로의 형상중 가장 잘 맞는 형상에 매치함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 포괄적인 등록을 주기적으로 실행한 다음, 상기 촬상 장치에 의해 포착된 이미지를 상기 해부학적 구조의 컴퓨터 모델의 복수의 가상 뷰와 비교함으로써 상기 의료 장치로의 상기 컴퓨터 모델의 국부적인 등록을 실행하는 단계를 포함하고,
상기 복수의 가상 뷰는 가상 카메라의 관점으로부터 생성되고 상기 가상 카메라의 포즈는 초기에 상기 의료 장치의 말단부의 포즈에서 설정된 다음에 초기 포즈에 대해 교란되는 것을 특징으로 하는 해부학적 구조의 컴퓨터 모델 등록 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/107,562 | 2011-05-13 | ||
| US13/107,562 US8900131B2 (en) | 2011-05-13 | 2011-05-13 | Medical system providing dynamic registration of a model of an anatomical structure for image-guided surgery |
| PCT/US2012/035390 WO2012158324A2 (en) | 2011-05-13 | 2012-04-27 | Medical system providing dynamic registration of a model of an anatomical structure for image-guided surgery |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140033128A true KR20140033128A (ko) | 2014-03-17 |
| KR101930774B1 KR101930774B1 (ko) | 2018-12-19 |
Family
ID=47142305
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137033281A KR101930774B1 (ko) | 2011-05-13 | 2012-04-27 | 영상유도수술을 위해 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US8900131B2 (ko) |
| EP (2) | EP3058889B1 (ko) |
| KR (1) | KR101930774B1 (ko) |
| CN (2) | CN105919547B (ko) |
| WO (1) | WO2012158324A2 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180000733A (ko) * | 2015-05-22 | 2018-01-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영상 안내 수술에서의 상관 보상의 시스템 및 방법 |
| KR20190041902A (ko) * | 2017-10-13 | 2019-04-23 | 한양대학교 산학협력단 | 인공지능 기반의 자동 삽관 장치 및 그 구동 방법 |
| WO2019074331A3 (ko) * | 2017-10-13 | 2019-06-27 | 한양대학교 산학협력단 | 인공지능 기반의 자동 삽관 장치 및 그 구동 방법 |
| KR20230082051A (ko) * | 2016-12-28 | 2023-06-08 | 아우리스 헬스, 인코포레이티드 | 가요성 기구 삽입을 위한 장치 |
Families Citing this family (267)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130165945A9 (en) * | 2007-08-14 | 2013-06-27 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable instrument |
| US8218847B2 (en) | 2008-06-06 | 2012-07-10 | Superdimension, Ltd. | Hybrid registration method |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| CN102883651B (zh) * | 2010-01-28 | 2016-04-27 | 宾夕法尼亚州研究基金会 | 可应用于支气管镜引导的基于图像的全局配准系统和方法 |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| US20120191107A1 (en) | 2010-09-17 | 2012-07-26 | Tanner Neal A | Systems and methods for positioning an elongate member inside a body |
| JP6195822B2 (ja) * | 2011-03-31 | 2017-09-13 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 医療処置を支援する形状検出 |
| US8827934B2 (en) | 2011-05-13 | 2014-09-09 | Intuitive Surgical Operations, Inc. | Method and system for determining information of extrema during expansion and contraction cycles of an object |
| BR112014009327A2 (pt) * | 2011-10-20 | 2017-04-11 | Koninklijke Philips Nv | método e sistema |
| DE102012200921B4 (de) * | 2012-01-23 | 2014-08-21 | Siemens Aktiengesellschaft | Verfahren zum Ermitteln einer Abweichung eines medizinischen Instruments von einer Zielposition |
| EP3488803B1 (en) | 2012-02-03 | 2023-09-27 | Intuitive Surgical Operations, Inc. | Steerable flexible needle with embedded shape sensing |
| EP3524184B1 (en) | 2012-05-14 | 2021-02-24 | Intuitive Surgical Operations Inc. | Systems for registration of a medical device using a reduced search space |
| WO2013173229A1 (en) | 2012-05-14 | 2013-11-21 | Intuitive Surgical Operations | Systems and methods for deformation compensation using shape sensing |
| WO2013173234A1 (en) | 2012-05-14 | 2013-11-21 | Intuitive Surgical Operations | Systems and methods for registration of a medical device using rapid pose search |
| US10039473B2 (en) | 2012-05-14 | 2018-08-07 | Intuitive Surgical Operations, Inc. | Systems and methods for navigation based on ordered sensor records |
| US9429696B2 (en) | 2012-06-25 | 2016-08-30 | Intuitive Surgical Operations, Inc. | Systems and methods for reducing measurement error in optical fiber shape sensors |
| WO2014028394A1 (en) | 2012-08-14 | 2014-02-20 | Intuitive Surgical Operations, Inc. | Systems and methods for registration of multiple vision systems |
| JP6219396B2 (ja) | 2012-10-12 | 2017-10-25 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 分岐した解剖学的構造における医療デバイスの位置決定 |
| US20140240713A1 (en) * | 2012-12-21 | 2014-08-28 | Volcano Corporation | Apparatuses and methods for imaging inside a vessel |
| US10588597B2 (en) * | 2012-12-31 | 2020-03-17 | Intuitive Surgical Operations, Inc. | Systems and methods for interventional procedure planning |
| WO2014125388A1 (en) * | 2013-02-14 | 2014-08-21 | Koninklijke Philips N.V. | Interventional system |
| US9839481B2 (en) | 2013-03-07 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Hybrid manual and robotic interventional instruments and methods of use |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US20140257095A1 (en) * | 2013-03-11 | 2014-09-11 | Volcano Corporation | Shape sensing interventional catheters and methods of use |
| WO2014141968A1 (ja) * | 2013-03-12 | 2014-09-18 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| EP2968857B1 (en) | 2013-03-15 | 2022-05-04 | Intuitive Surgical Operations, Inc. | Shape sensor systems for tracking interventional instruments |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| US10206747B2 (en) | 2013-05-15 | 2019-02-19 | Intuitive Surgical Operations, Inc. | Guide apparatus for delivery of a flexible instrument and methods of use |
| US9592095B2 (en) | 2013-05-16 | 2017-03-14 | Intuitive Surgical Operations, Inc. | Systems and methods for robotic medical system integration with external imaging |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| WO2015003154A1 (en) | 2013-07-03 | 2015-01-08 | Histosonics, Inc. | Articulating arm limiter for cavitational ultrasound therapy system |
| WO2015017270A1 (en) | 2013-07-29 | 2015-02-05 | Intuitive Surgical Operations, Inc. | Shape sensor systems with redundant sensing |
| KR102356881B1 (ko) | 2013-08-15 | 2022-02-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 카테터 위치설정 및 삽입을 위한 그래픽 사용자 인터페이스 |
| JP6562919B2 (ja) | 2013-08-15 | 2019-08-21 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 医療処置確認のためのシステム及び方法 |
| US10780298B2 (en) | 2013-08-22 | 2020-09-22 | The Regents Of The University Of Michigan | Histotripsy using very short monopolar ultrasound pulses |
| US10376321B2 (en) | 2013-09-12 | 2019-08-13 | Intuitive Surgical Operations, Inc. | Shape sensor systems for localizing movable targets |
| CN105939647B (zh) * | 2013-10-24 | 2020-01-21 | 奥瑞斯健康公司 | 机器人辅助腔内外科手术系统及相关方法 |
| CN105682729B (zh) | 2013-10-25 | 2019-06-18 | 直观外科手术操作公司 | 具有带槽的可操控管的柔性器械 |
| WO2015061692A1 (en) | 2013-10-25 | 2015-04-30 | Intuitive Surgical Operations, Inc. | Flexible instrument with embedded actuation conduits |
| US10447947B2 (en) * | 2013-10-25 | 2019-10-15 | The University Of Akron | Multipurpose imaging and display system |
| JP2017502728A (ja) | 2013-12-09 | 2017-01-26 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 装置を認識する可撓性ツール位置合わせのためのシステム及び方法 |
| EP3079597B1 (en) | 2013-12-13 | 2023-07-26 | Intuitive Surgical Operations, Inc. | Telescoping biopsy needle |
| CN105899138B (zh) * | 2014-01-06 | 2019-11-05 | 皇家飞利浦有限公司 | 部署建模 |
| CN105979879B (zh) * | 2014-01-24 | 2023-01-17 | 皇家飞利浦有限公司 | 具有光学形状感测设备视角的虚拟图像 |
| CN105934216B (zh) * | 2014-01-24 | 2019-09-17 | 皇家飞利浦有限公司 | 机器人引导系统、控制单元和装置 |
| EP3979210A1 (en) | 2014-02-04 | 2022-04-06 | Intuitive Surgical Operations, Inc. | Systems and methods for non-rigid deformation of tissue for virtual navigation of interventional tools |
| DE102014203097A1 (de) | 2014-02-20 | 2015-08-20 | Siemens Aktiengesellschaft | Verfahren zum Unterstützen einer Navigation einer endoskopischen Vorrichtung |
| EP3243476B1 (en) | 2014-03-24 | 2019-11-06 | Auris Health, Inc. | Systems and devices for catheter driving instinctiveness |
| US10912523B2 (en) * | 2014-03-24 | 2021-02-09 | Intuitive Surgical Operations, Inc. | Systems and methods for anatomic motion compensation |
| KR20160138502A (ko) * | 2014-03-28 | 2016-12-05 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 정량적인 3차원 모델의 3차원 영상과의 정렬 |
| CN111184577A (zh) | 2014-03-28 | 2020-05-22 | 直观外科手术操作公司 | 器械在视野中的定量三维可视化 |
| EP3125806B1 (en) | 2014-03-28 | 2023-06-14 | Intuitive Surgical Operations, Inc. | Quantitative three-dimensional imaging of surgical scenes |
| EP3122281B1 (en) | 2014-03-28 | 2022-07-20 | Intuitive Surgical Operations, Inc. | Quantitative three-dimensional imaging and 3d modeling of surgical implants |
| EP3125809B1 (en) | 2014-03-28 | 2020-09-09 | Intuitive Surgical Operations, Inc. | Surgical system with haptic feedback based upon quantitative three-dimensional imaging |
| KR102373714B1 (ko) | 2014-03-28 | 2022-03-15 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 멀티포트 투시에 의한 수술 장면의 정량적 3차원 영상화 |
| US20150272698A1 (en) * | 2014-03-31 | 2015-10-01 | Regents Of The University Of Minnesota | Navigation tools using shape sensing technology |
| FR3021518A1 (fr) * | 2014-05-27 | 2015-12-04 | Francois Duret | Dispositif de visualisation pour faciliter la mesure et le diagnostic 3d par empreinte optique en dentisterie |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| EP4233707A3 (en) * | 2014-07-02 | 2023-10-11 | Covidien LP | System and program for providing distance and orientation feedback while navigating in 3d |
| US9633431B2 (en) | 2014-07-02 | 2017-04-25 | Covidien Lp | Fluoroscopic pose estimation |
| US9603668B2 (en) | 2014-07-02 | 2017-03-28 | Covidien Lp | Dynamic 3D lung map view for tool navigation inside the lung |
| EP3174490B1 (en) | 2014-07-28 | 2020-04-15 | Intuitive Surgical Operations, Inc. | Systems and methods for planning multiple interventional procedures |
| WO2016018618A1 (en) | 2014-07-28 | 2016-02-04 | Intuitive Surgical Operations, Inc. | Guide apparatus for delivery of a flexible instrument and methods of use |
| KR20170038012A (ko) * | 2014-07-28 | 2017-04-05 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술중 세그먼트화를 위한 시스템 및 방법 |
| EP4233769A3 (en) | 2014-08-22 | 2023-11-08 | Intuitive Surgical Operations, Inc. | Systems and methods for adaptive input mapping |
| JP6548730B2 (ja) * | 2014-08-23 | 2019-07-24 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 画像誘導処置における病理学的データの表示のためのシステム及び方法 |
| EP3182922A4 (en) * | 2014-08-23 | 2018-03-21 | Intuitive Surgical Operations, Inc. | Systems and methods for dynamic trajectory control |
| EP3185810B1 (en) | 2014-08-25 | 2020-12-09 | Intuitive Surgical Operations, Inc. | Systems for medical instrument force sensing |
| US10373719B2 (en) | 2014-09-10 | 2019-08-06 | Intuitive Surgical Operations, Inc. | Systems and methods for pre-operative modeling |
| US11273290B2 (en) | 2014-09-10 | 2022-03-15 | Intuitive Surgical Operations, Inc. | Flexible instrument with nested conduits |
| US10314513B2 (en) * | 2014-10-10 | 2019-06-11 | Intuitive Surgical Operations, Inc. | Systems and methods for reducing measurement error using optical fiber shape sensors |
| CN110811488B (zh) | 2014-10-17 | 2023-07-14 | 直观外科手术操作公司 | 用于使用光纤形状传感器减小测量误差的系统和方法 |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US9986983B2 (en) | 2014-10-31 | 2018-06-05 | Covidien Lp | Computed tomography enhanced fluoroscopic system, device, and method of utilizing the same |
| EP4140432A1 (en) | 2014-11-13 | 2023-03-01 | Intuitive Surgical Operations, Inc. | Systems and methods for filtering localization data |
| EP3037056B1 (en) | 2014-12-23 | 2021-04-21 | Stryker European Holdings I, LLC | System for reconstructing a trajectory of an optical fiber |
| WO2016116825A1 (en) * | 2015-01-22 | 2016-07-28 | Koninklijke Philips N.V. | Endograft visualization with optical shape sensing |
| JP6348078B2 (ja) * | 2015-03-06 | 2018-06-27 | 富士フイルム株式会社 | 分岐構造判定装置、分岐構造判定装置の作動方法および分岐構造判定プログラム |
| GB2536650A (en) | 2015-03-24 | 2016-09-28 | Augmedics Ltd | Method and system for combining video-based and optic-based augmented reality in a near eye display |
| US11819636B2 (en) | 2015-03-30 | 2023-11-21 | Auris Health, Inc. | Endoscope pull wire electrical circuit |
| WO2016164311A1 (en) | 2015-04-06 | 2016-10-13 | Intuitive Surgical Operations, Inc. | Systems and methods of registration compensation in image guided surgery |
| US10108882B1 (en) * | 2015-05-16 | 2018-10-23 | Sturfee, Inc. | Method to post and access information onto a map through pictures |
| US9622831B2 (en) * | 2015-05-20 | 2017-04-18 | Siemens Healthcare Gmbh | Method and apparatus to provide updated patient images during robotic surgery |
| CN114376733A (zh) * | 2015-06-09 | 2022-04-22 | 直观外科手术操作公司 | 利用外科手术过程图集配置外科手术系统 |
| EP4230262A3 (en) * | 2015-06-24 | 2023-11-22 | The Regents Of The University Of Michigan | Histotripsy therapy systems for the treatment of brain tissue |
| WO2017009905A1 (ja) * | 2015-07-10 | 2017-01-19 | オリンパス株式会社 | 可撓管挿入装置 |
| US10674982B2 (en) | 2015-08-06 | 2020-06-09 | Covidien Lp | System and method for local three dimensional volume reconstruction using a standard fluoroscope |
| US10716525B2 (en) | 2015-08-06 | 2020-07-21 | Covidien Lp | System and method for navigating to target and performing procedure on target utilizing fluoroscopic-based local three dimensional volume reconstruction |
| US10702226B2 (en) | 2015-08-06 | 2020-07-07 | Covidien Lp | System and method for local three dimensional volume reconstruction using a standard fluoroscope |
| EP3795061A1 (en) * | 2015-08-14 | 2021-03-24 | Intuitive Surgical Operations, Inc. | Systems and methods of registration for image-guided surgery |
| EP3334325A4 (en) | 2015-08-14 | 2019-05-01 | Intuitive Surgical Operations Inc. | SYSTEMS AND METHODS FOR RECORDING FOR IMAGE-GUIDED SURGERY |
| JPWO2017033728A1 (ja) * | 2015-08-26 | 2018-06-14 | オリンパス株式会社 | 内視鏡装置 |
| WO2017044874A1 (en) * | 2015-09-10 | 2017-03-16 | Intuitive Surgical Operations, Inc. | Systems and methods for using tracking in image-guided medical procedure |
| AU2016323982A1 (en) | 2015-09-18 | 2018-04-12 | Auris Health, Inc. | Navigation of tubular networks |
| WO2017055620A1 (en) * | 2015-10-02 | 2017-04-06 | Koninklijke Philips N.V. | Hub for device navigation with optical shape sensed guidewire |
| US10709352B2 (en) * | 2015-10-27 | 2020-07-14 | Covidien Lp | Method of using lung airway carina locations to improve ENB registration |
| CN108472084B (zh) | 2015-11-12 | 2021-08-27 | 直观外科手术操作公司 | 具有训练或辅助功能的外科手术系统 |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| JP7118890B2 (ja) | 2016-02-12 | 2022-08-16 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 画像誘導手術において位置合わせされた蛍光透視画像を使用するためのシステム及び方法 |
| EP3413829B1 (en) * | 2016-02-12 | 2024-05-22 | Intuitive Surgical Operations, Inc. | Systems of pose estimation and calibration of perspective imaging system in image guided surgery |
| US10191615B2 (en) * | 2016-04-28 | 2019-01-29 | Medtronic Navigation, Inc. | Method and apparatus for image-based navigation |
| EP3478172A4 (en) * | 2016-06-29 | 2020-02-26 | Vision Quest Industries Incorporated Dba VQ Orthocare | MEASUREMENT AND CONTROL SYSTEM FOR ORTHOPEDIC DEVICES. |
| CN109069206B (zh) | 2016-06-30 | 2021-08-17 | 直观外科手术操作公司 | 用于医疗机器人系统的故障反应机制的系统和方法 |
| EP3478355A4 (en) | 2016-06-30 | 2020-03-04 | Intuitive Surgical Operations Inc. | ORIENTABLE ELONGATE DEVICE SYSTEMS AND METHODS |
| WO2018005861A1 (en) * | 2016-06-30 | 2018-01-04 | Intuitive Surgical Operations, Inc. | Graphical user interface for displaying guidance information during an image-guided procedure |
| WO2018005842A1 (en) | 2016-06-30 | 2018-01-04 | Intuitive Surgical Operations, Inc. | Graphical user interface for displaying guidance information in a plurality of modes during an image-guided procedure |
| CN109310287B (zh) | 2016-07-01 | 2023-01-03 | 直观外科手术操作公司 | 一种计算机辅助医疗系统及其控制方法 |
| CN109475721B (zh) | 2016-07-08 | 2021-06-08 | 直观外科手术操作公司 | 用于输送细长设备的引导装置和使用方法 |
| EP3503834B1 (en) * | 2016-08-23 | 2024-06-12 | Intuitive Surgical Operations, Inc. | Systems for monitoring patient motion during a medical procedure |
| US10729886B2 (en) | 2016-08-24 | 2020-08-04 | Intuitive Surgical Operations, Inc. | Axial support structure for a flexible elongate device |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US10881385B2 (en) | 2016-09-13 | 2021-01-05 | Intuitive Surgical Operations, Inc. | Radial telescoping guide apparatus for delivery of a flexible instrument and methods of use |
| WO2018057633A1 (en) | 2016-09-21 | 2018-03-29 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument buckling detection |
| US10682192B2 (en) | 2016-09-30 | 2020-06-16 | Intuitive Surgical Operations, Inc. | Variable-length guide apparatus for delivery of a flexible instrument and methods of use |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| WO2018064566A1 (en) | 2016-09-30 | 2018-04-05 | Intuitive Surgical Operations, Inc. | Systems and methods for entry point localization |
| CN115631843A (zh) | 2016-11-02 | 2023-01-20 | 直观外科手术操作公司 | 用于图像引导的外科手术的连续配准的系统和方法 |
| US10299699B2 (en) * | 2016-11-28 | 2019-05-28 | Biosense Webster (Israel) Ltd. | Computerized tomography image correction |
| CN109922753B (zh) | 2016-12-08 | 2023-04-14 | 直观外科手术操作公司 | 用于图像引导医疗程序中导航的系统和方法 |
| CN106667577A (zh) * | 2016-12-13 | 2017-05-17 | 安徽乐年健康养老产业有限公司 | 一种基于虚拟现实的医疗设备操控系统 |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| EP3566212A4 (en) * | 2017-01-06 | 2020-08-19 | Intuitive Surgical Operations Inc. | SYSTEM AND PROCEDURE FOR REGISTRATION AND COORDINATED MANIPULATION OF IMAGE COMPONENTS WITH EXTENDED REALITY |
| US11779396B2 (en) | 2017-01-09 | 2023-10-10 | Intuitive Surgical Operations, Inc. | Systems and methods for registering elongate devices to three dimensional images in image-guided procedures |
| US11173003B2 (en) | 2017-01-10 | 2021-11-16 | Intuitive Surgical Operations, Inc. | Systems and methods for using a robotic medical system |
| EP3568783A4 (en) * | 2017-01-11 | 2020-11-11 | Magic Leap, Inc. | MEDICAL ASSISTANT |
| CN110167477B (zh) | 2017-02-01 | 2023-12-29 | 直观外科手术操作公司 | 图像引导手术的配准系统和方法 |
| WO2018144726A1 (en) * | 2017-02-01 | 2018-08-09 | Intuitive Surgical Operations, Inc. | Systems and methods for data filtering of passageway sensor data |
| US11744654B2 (en) | 2017-02-06 | 2023-09-05 | Intuitive Surgical Operations, Inc. | Systems and methods for coupling components of a medical system |
| US11793579B2 (en) | 2017-02-22 | 2023-10-24 | Covidien Lp | Integration of multiple data sources for localization and navigation |
| US11464411B2 (en) | 2017-03-13 | 2022-10-11 | Intuitive Surgical Operations, Inc. | Systems and methods for medical procedures using optical coherence tomography sensing |
| CN110621253A (zh) * | 2017-03-17 | 2019-12-27 | 智能联合外科公司 | 用于导航手术中的增强现实显示的系统和方法 |
| CN116585031A (zh) | 2017-03-22 | 2023-08-15 | 直观外科手术操作公司 | 用于智能种子配准的系统和方法 |
| AU2018243364B2 (en) | 2017-03-31 | 2023-10-05 | Auris Health, Inc. | Robotic systems for navigation of luminal networks that compensate for physiological noise |
| JP2020518326A (ja) | 2017-04-18 | 2020-06-25 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 画像誘導処置を監視するためのグラフィカル・ユーザインターフェイス |
| EP3613057A4 (en) | 2017-04-18 | 2021-04-21 | Intuitive Surgical Operations, Inc. | GRAPHIC USER INTERFACE FOR PLANNING A PROCEDURE |
| CN110831498B (zh) | 2017-05-12 | 2022-08-12 | 奥瑞斯健康公司 | 活检装置和系统 |
| CN110769736B (zh) | 2017-05-17 | 2023-01-13 | 奥瑞斯健康公司 | 可更换工作通道 |
| US10242548B2 (en) * | 2017-05-23 | 2019-03-26 | Biosense Webster (Israel) Ltd. | Medical tool puncture warning method and apparatus |
| US10022192B1 (en) * | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| EP3641686A4 (en) | 2017-06-23 | 2021-03-24 | Intuitive Surgical Operations, Inc. | SYSTEMS AND PROCEDURES FOR NAVIGATION TO A DESTINATION DURING A MEDICAL OPERATION |
| US10699448B2 (en) | 2017-06-29 | 2020-06-30 | Covidien Lp | System and method for identifying, marking and navigating to a target using real time two dimensional fluoroscopic data |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US10512515B2 (en) | 2017-07-31 | 2019-12-24 | Intuitive Surgical Operations, Inc. | Systems and methods for steerable elongate device |
| CN117838302A (zh) | 2017-07-31 | 2024-04-09 | 直观外科手术操作公司 | 用于装置的安全操作的系统和方法 |
| KR102054551B1 (ko) * | 2017-08-02 | 2019-12-12 | 재단법인 아산사회복지재단 | Fbg 광섬유를 이용한 형상 및 접촉력 센싱 카테터 및 카테터 시스템 |
| WO2019036006A1 (en) * | 2017-08-16 | 2019-02-21 | Covidien Lp | SYNTHESIS OF SPACE-SENSITIVE TRANSITIONS BETWEEN MULTIPLE VIEWPOINTS OF VIEWING DEVICES DURING MINI-INVASIVE SURGERY |
| JP7213867B2 (ja) * | 2017-08-16 | 2023-01-27 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 医療処置中に患者の動きをモニタするためのシステムおよび方法 |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| WO2019075074A1 (en) | 2017-10-10 | 2019-04-18 | Covidien Lp | SYSTEM AND METHOD FOR IDENTIFICATION AND MARKING OF A TARGET IN A THREE-DIMENSIONAL FLUOROSCOPIC RECONSTRUCTION |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| DE112018005836T5 (de) | 2017-11-14 | 2020-08-06 | Intuitive Surgical Operations Inc. | Systeme und verfahren zum reinigen endoskopischer instrumente |
| WO2019113249A1 (en) | 2017-12-06 | 2019-06-13 | Auris Health, Inc. | Systems and methods to correct for uncommanded instrument roll |
| CN110869173B (zh) | 2017-12-14 | 2023-11-17 | 奥瑞斯健康公司 | 用于估计器械定位的系统与方法 |
| US11160615B2 (en) * | 2017-12-18 | 2021-11-02 | Auris Health, Inc. | Methods and systems for instrument tracking and navigation within luminal networks |
| CN111432709B (zh) | 2017-12-19 | 2024-04-16 | 直观外科手术操作公司 | 成像系统和使用方法 |
| US10786311B2 (en) * | 2017-12-22 | 2020-09-29 | Acclarent, Inc. | Apparatus and method for registering facial landmarks for surgical navigation system |
| WO2019139931A1 (en) * | 2018-01-10 | 2019-07-18 | Covidien Lp | Guidance for placement of surgical ports |
| US10905498B2 (en) | 2018-02-08 | 2021-02-02 | Covidien Lp | System and method for catheter detection in fluoroscopic images and updating displayed position of catheter |
| US10893842B2 (en) | 2018-02-08 | 2021-01-19 | Covidien Lp | System and method for pose estimation of an imaging device and for determining the location of a medical device with respect to a target |
| US10930064B2 (en) | 2018-02-08 | 2021-02-23 | Covidien Lp | Imaging reconstruction system and method |
| CN110891514B (zh) | 2018-02-13 | 2023-01-20 | 奥瑞斯健康公司 | 用于驱动医疗器械的系统和方法 |
| US10517681B2 (en) * | 2018-02-27 | 2019-12-31 | NavLab, Inc. | Artificial intelligence guidance system for robotic surgery |
| MX2020009075A (es) * | 2018-03-01 | 2021-03-25 | Auris Health Inc | Métodos y sistemas de mapeo y navegación. |
| CN110913791B (zh) | 2018-03-28 | 2021-10-08 | 奥瑞斯健康公司 | 用于显示所估计的器械定位的系统和方法 |
| KR102489198B1 (ko) | 2018-03-28 | 2023-01-18 | 아우리스 헬스, 인코포레이티드 | 위치 센서의 정합을 위한 시스템 및 방법 |
| EP3773135B1 (en) | 2018-03-28 | 2024-02-14 | Auris Health, Inc. | Medical instruments with variable bending stiffness profiles |
| CN111936075A (zh) | 2018-04-12 | 2020-11-13 | 逸吉恩哆股份公司 | 自行式内窥镜系统及其控制方法 |
| WO2019199125A1 (ko) * | 2018-04-12 | 2019-10-17 | 주식회사 이지엔도서지컬 | 자율 주행 내시경 시스템 및 그 제어 방법 |
| CN112004496B (zh) * | 2018-04-25 | 2024-10-18 | 直观外科手术操作公司 | 与细长装置有关的系统和方法 |
| WO2019211741A1 (en) | 2018-05-02 | 2019-11-07 | Augmedics Ltd. | Registration of a fiducial marker for an augmented reality system |
| US11514591B2 (en) * | 2018-05-11 | 2022-11-29 | Intuitive Surgical Operations, Inc. | Systems and methods related to registration for image guided surgery |
| JP7397006B2 (ja) | 2018-05-15 | 2023-12-12 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | カテーテル制御システムのバックエンド機構 |
| JP7250824B2 (ja) | 2018-05-30 | 2023-04-03 | オーリス ヘルス インコーポレイテッド | 位置センサベースの分岐予測のためのシステム及び方法 |
| JP7146949B2 (ja) * | 2018-05-31 | 2022-10-04 | オーリス ヘルス インコーポレイテッド | 画像ベースの気道分析及びマッピング |
| EP3801280B1 (en) | 2018-05-31 | 2024-10-02 | Auris Health, Inc. | Robotic systems for navigation of luminal network that detect physiological noise |
| EP3801189B1 (en) | 2018-05-31 | 2024-09-11 | Auris Health, Inc. | Path-based navigation of tubular networks |
| CN111989022A (zh) | 2018-06-19 | 2020-11-24 | 直观外科手术操作公司 | 用于将柔性细长装置保持在姿势中的系统和方法 |
| US11678788B2 (en) | 2018-07-25 | 2023-06-20 | Intuitive Surgical Operations, Inc. | Systems and methods for use of a variable stiffness flexible elongate device |
| US11705238B2 (en) | 2018-07-26 | 2023-07-18 | Covidien Lp | Systems and methods for providing assistance during surgery |
| US11071591B2 (en) | 2018-07-26 | 2021-07-27 | Covidien Lp | Modeling a collapsed lung using CT data |
| US10898276B2 (en) | 2018-08-07 | 2021-01-26 | Auris Health, Inc. | Combining strain-based shape sensing with catheter control |
| WO2020068853A2 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Articulating medical instruments |
| US12076100B2 (en) | 2018-09-28 | 2024-09-03 | Auris Health, Inc. | Robotic systems and methods for concomitant endoscopic and percutaneous medical procedures |
| CN112770690A (zh) | 2018-09-28 | 2021-05-07 | 奥瑞斯健康公司 | 用于对接医疗器械的系统和方法 |
| US11944388B2 (en) | 2018-09-28 | 2024-04-02 | Covidien Lp | Systems and methods for magnetic interference correction |
| WO2020072917A1 (en) | 2018-10-05 | 2020-04-09 | Intuitive Surgical Operations, Inc. | Systems and methods for positioning medical instruments |
| US11737823B2 (en) | 2018-10-31 | 2023-08-29 | Intuitive Surgical Operations, Inc. | Antenna systems and methods of use |
| US11280863B2 (en) | 2018-11-02 | 2022-03-22 | Intuitive Surgical Operations, Inc. | Coiled antenna with fluid cooling |
| US11637378B2 (en) | 2018-11-02 | 2023-04-25 | Intuitive Surgical Operations, Inc. | Coiled dipole antenna |
| US11730537B2 (en) | 2018-11-13 | 2023-08-22 | Intuitive Surgical Operations, Inc. | Cooled chokes for ablation systems and methods of use |
| US11766296B2 (en) | 2018-11-26 | 2023-09-26 | Augmedics Ltd. | Tracking system for image-guided surgery |
| US10939977B2 (en) | 2018-11-26 | 2021-03-09 | Augmedics Ltd. | Positioning marker |
| JP2022510654A (ja) | 2018-11-28 | 2022-01-27 | ヒストソニックス,インコーポレーテッド | 組織破砕システムおよび方法 |
| US11877806B2 (en) | 2018-12-06 | 2024-01-23 | Covidien Lp | Deformable registration of computer-generated airway models to airway trees |
| US11045075B2 (en) * | 2018-12-10 | 2021-06-29 | Covidien Lp | System and method for generating a three-dimensional model of a surgical site |
| US11617493B2 (en) | 2018-12-13 | 2023-04-04 | Covidien Lp | Thoracic imaging, distance measuring, surgical awareness, and notification system and method |
| US11801113B2 (en) | 2018-12-13 | 2023-10-31 | Covidien Lp | Thoracic imaging, distance measuring, and notification system and method |
| US11107213B2 (en) * | 2018-12-28 | 2021-08-31 | Biosense Webster (Israel) Ltd. | Correcting medical scans |
| US11986257B2 (en) | 2018-12-28 | 2024-05-21 | Auris Health, Inc. | Medical instrument with articulable segment |
| US11357593B2 (en) | 2019-01-10 | 2022-06-14 | Covidien Lp | Endoscopic imaging with augmented parallax |
| US11625825B2 (en) | 2019-01-30 | 2023-04-11 | Covidien Lp | Method for displaying tumor location within endoscopic images |
| US11564751B2 (en) | 2019-02-01 | 2023-01-31 | Covidien Lp | Systems and methods for visualizing navigation of medical devices relative to targets |
| US11925333B2 (en) | 2019-02-01 | 2024-03-12 | Covidien Lp | System for fluoroscopic tracking of a catheter to update the relative position of a target and the catheter in a 3D model of a luminal network |
| US11744643B2 (en) | 2019-02-04 | 2023-09-05 | Covidien Lp | Systems and methods facilitating pre-operative prediction of post-operative tissue function |
| JP7515495B2 (ja) * | 2019-02-28 | 2024-07-12 | コーニンクレッカ フィリップス エヌ ヴェ | 機械学習モデルのための訓練データ収集 |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| US11819285B2 (en) | 2019-04-05 | 2023-11-21 | Covidien Lp | Magnetic interference detection systems and methods |
| US11701181B2 (en) * | 2019-04-24 | 2023-07-18 | Warsaw Orthopedic, Inc. | Systems, instruments and methods for surgical navigation with verification feedback |
| US11980506B2 (en) | 2019-07-29 | 2024-05-14 | Augmedics Ltd. | Fiducial marker |
| US12089902B2 (en) | 2019-07-30 | 2024-09-17 | Coviden Lp | Cone beam and 3D fluoroscope lung navigation |
| US11717147B2 (en) | 2019-08-15 | 2023-08-08 | Auris Health, Inc. | Medical device having multiple bending sections |
| US12059281B2 (en) | 2019-08-19 | 2024-08-13 | Covidien Lp | Systems and methods of fluoro-CT imaging for initial registration |
| US11269173B2 (en) | 2019-08-19 | 2022-03-08 | Covidien Lp | Systems and methods for displaying medical video images and/or medical 3D models |
| KR20220058569A (ko) | 2019-08-30 | 2022-05-09 | 아우리스 헬스, 인코포레이티드 | 위치 센서의 가중치-기반 정합을 위한 시스템 및 방법 |
| JP7451686B2 (ja) | 2019-08-30 | 2024-03-18 | オーリス ヘルス インコーポレイテッド | 器具画像信頼性システム及び方法 |
| US11931111B2 (en) | 2019-09-09 | 2024-03-19 | Covidien Lp | Systems and methods for providing surgical guidance |
| US11864935B2 (en) | 2019-09-09 | 2024-01-09 | Covidien Lp | Systems and methods for pose estimation of a fluoroscopic imaging device and for three-dimensional imaging of body structures |
| EP4028720B1 (de) * | 2019-09-12 | 2024-07-24 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren und vorrichtung zur bestimmung der form eines lichtwellenleiters sowie vorrichtung zur erzeugung von trainingsdaten für ein neuronales netz |
| US11627924B2 (en) | 2019-09-24 | 2023-04-18 | Covidien Lp | Systems and methods for image-guided navigation of percutaneously-inserted devices |
| CN110710950B (zh) * | 2019-11-01 | 2020-11-10 | 东南大学苏州医疗器械研究院 | 内窥镜支气管左右管腔的判断方法及装置、内窥镜系统 |
| EP3824839A1 (en) * | 2019-11-19 | 2021-05-26 | Koninklijke Philips N.V. | Robotic positioning of a device |
| US12102298B2 (en) | 2019-12-10 | 2024-10-01 | Covidien Lp | Lymphatic system tracking |
| US11382712B2 (en) | 2019-12-22 | 2022-07-12 | Augmedics Ltd. | Mirroring in image guided surgery |
| WO2021137109A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Alignment techniques for percutaneous access |
| EP4084721A4 (en) | 2019-12-31 | 2024-01-03 | Auris Health, Inc. | IDENTIFICATION OF AN ANATOMIC FEATURE AND AIMING |
| EP4084717A4 (en) | 2019-12-31 | 2024-02-14 | Auris Health, Inc. | DYNAMIC PULLEY SYSTEM |
| CN118383870A (zh) | 2019-12-31 | 2024-07-26 | 奥瑞斯健康公司 | 用于经皮进入的对准界面 |
| US11380060B2 (en) | 2020-01-24 | 2022-07-05 | Covidien Lp | System and method for linking a segmentation graph to volumetric data |
| US11847730B2 (en) | 2020-01-24 | 2023-12-19 | Covidien Lp | Orientation detection in fluoroscopic images |
| CA3169465A1 (en) | 2020-01-28 | 2021-08-05 | The Regents Of The University Of Michigan | Systems and methods for histotripsy immunosensitization |
| CN111281544B (zh) * | 2020-02-26 | 2023-05-12 | 陕西中医药大学 | 体内医疗器械自动引导机器人系统及其自动引导方法 |
| US20230281841A1 (en) * | 2020-03-24 | 2023-09-07 | Intuitive Surgical Operations, Inc. | Systems and methods for registering an instrument to an image using point cloud data and endoscopic image data |
| WO2021207264A2 (en) | 2020-04-10 | 2021-10-14 | Intuitive Surgical Operations, Inc. | Flexible instruments with patterned antenna assemblies having variable recoverable flexibility |
| US12064191B2 (en) | 2020-06-03 | 2024-08-20 | Covidien Lp | Surgical tool navigation using sensor fusion |
| US11701492B2 (en) | 2020-06-04 | 2023-07-18 | Covidien Lp | Active distal tip drive |
| US11389252B2 (en) | 2020-06-15 | 2022-07-19 | Augmedics Ltd. | Rotating marker for image guided surgery |
| US11950950B2 (en) | 2020-07-24 | 2024-04-09 | Covidien Lp | Zoom detection and fluoroscope movement detection for target overlay |
| CN112294236B (zh) * | 2020-10-14 | 2022-03-25 | 北京大学 | 内窥镜前端弯曲部形态检测系统及其检测方法 |
| CN116472003A (zh) | 2020-11-11 | 2023-07-21 | 直观外科手术操作公司 | 非对称柔性装置的张力控制 |
| CN116669651A (zh) | 2020-11-30 | 2023-08-29 | 直观外科手术操作公司 | 用于缩回和调节细长柔性装置的系统和相关方法 |
| CN112741689B (zh) * | 2020-12-18 | 2022-03-18 | 上海卓昕医疗科技有限公司 | 应用光扫描部件来实现导航的方法及系统 |
| CN112741692B (zh) * | 2020-12-18 | 2021-12-14 | 上海卓昕医疗科技有限公司 | 实现将器件导航至目标组织位置的快速导航方法及系统 |
| US20220202500A1 (en) * | 2020-12-30 | 2022-06-30 | Canon U.S.A., Inc. | Intraluminal navigation using ghost instrument information |
| US20220202273A1 (en) * | 2020-12-30 | 2022-06-30 | Canon U.S.A., Inc. | Intraluminal navigation using virtual satellite targets |
| CN113116475B (zh) * | 2020-12-31 | 2023-06-20 | 杭州堃博生物科技有限公司 | 经导管的导航处理方法、装置、介质、设备与导航系统 |
| DE112022002005T8 (de) | 2021-04-07 | 2024-02-22 | Intuitive Surgical Operations, Inc. | Systeme, Verfahren und Medium enthaltend Instruktion zum Verbinden von Modellstrukturen, die anatomische Wege darstellen |
| CN117396915A (zh) | 2021-04-08 | 2024-01-12 | 直观外科手术操作公司 | 用于图像重新采样的系统和相关联的方法 |
| GB2620529A (en) * | 2021-05-06 | 2024-01-10 | Prec Robotics Hong Kong Limited | Method, equipment and storage medium for navigating a tubular component in a multifurcated channel |
| WO2022240790A1 (en) | 2021-05-11 | 2022-11-17 | Intuitive Surgical Operations, Inc. | Medical instrument guidance systems and associated methods |
| US11896445B2 (en) | 2021-07-07 | 2024-02-13 | Augmedics Ltd. | Iliac pin and adapter |
| CN113616333B (zh) * | 2021-09-13 | 2023-02-10 | 上海微创微航机器人有限公司 | 导管运动辅助方法、导管运动辅助系统及可读存储介质 |
| WO2023055723A1 (en) | 2021-09-28 | 2023-04-06 | Intuitive Surgical Operations, Inc. | Navigation assistance for an instrument |
| US20240324870A1 (en) | 2021-10-08 | 2024-10-03 | Intuitive Surgical Operations, Inc. | Medical instrument guidance systems, including guidance systems for percutaneous nephrolithotomy procedures, and associated devices and methods |
| CN114288523A (zh) * | 2021-12-24 | 2022-04-08 | 杭州堃博生物科技有限公司 | 柔性器械的检测方法、装置、手术系统、设备与介质 |
| CN115444572A (zh) * | 2022-08-10 | 2022-12-09 | 上海优医基医学科技有限公司 | 柔性器械控制方法、系统、电子设备、存储介质及机器人 |
| WO2024057210A1 (en) | 2022-09-13 | 2024-03-21 | Augmedics Ltd. | Augmented reality eyewear for image-guided medical intervention |
| WO2024163533A1 (en) | 2023-02-01 | 2024-08-08 | Intuitive Surgical Operations, Inc. | Elongate device extraction from intraoperative images |
| WO2024178047A1 (en) | 2023-02-23 | 2024-08-29 | Intuitive Surgical Operations, Inc. | Tool based flexible elongate device control |
| WO2024186659A1 (en) | 2023-03-06 | 2024-09-12 | Intuitive Surgical Operations, Inc. | Generation of high resolution medical images using a machine learning model |
| WO2024206262A1 (en) | 2023-03-27 | 2024-10-03 | Intuitive Surgical Operations, Inc. | Insertable tool identification for flexible elongate devices |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000009502A (ja) * | 1998-06-26 | 2000-01-14 | Mitsubishi Electric Corp | 流量制御弁の流量測定装置 |
| JP2003245273A (ja) * | 2001-12-19 | 2003-09-02 | Koninkl Philips Electronics Nv | 脈管系における位置確認を支援する方法 |
Family Cites Families (79)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5765561A (en) | 1994-10-07 | 1998-06-16 | Medical Media Systems | Video-based surgical targeting system |
| US5728044A (en) * | 1995-03-10 | 1998-03-17 | Shan; Yansong | Sensor device for spacial imaging of endoscopes |
| US5797849A (en) | 1995-03-28 | 1998-08-25 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| US6246898B1 (en) | 1995-03-28 | 2001-06-12 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| US6346940B1 (en) * | 1997-02-27 | 2002-02-12 | Kabushiki Kaisha Toshiba | Virtualized endoscope system |
| US6256090B1 (en) | 1997-07-31 | 2001-07-03 | University Of Maryland | Method and apparatus for determining the shape of a flexible body |
| US7214230B2 (en) | 1998-02-24 | 2007-05-08 | Hansen Medical, Inc. | Flexible instrument |
| US6468265B1 (en) | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US8600551B2 (en) | 1998-11-20 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with operatively couplable simulator unit for surgeon training |
| US6659939B2 (en) * | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6522906B1 (en) | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| US6556695B1 (en) * | 1999-02-05 | 2003-04-29 | Mayo Foundation For Medical Education And Research | Method for producing high resolution real-time images, of structure and function during medical procedures |
| US8944070B2 (en) * | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US8442618B2 (en) | 1999-05-18 | 2013-05-14 | Mediguide Ltd. | Method and system for delivering a medical device to a selected position within a lumen |
| JP4885388B2 (ja) | 2001-09-25 | 2012-02-29 | オリンパス株式会社 | 内視鏡挿入方向検出方法 |
| DE10210648A1 (de) | 2002-03-11 | 2003-10-02 | Siemens Ag | Verfahren zur Erfassung und Darstellung eines in ein zu untersuchendes oder behandelndes Hohlraumorgan eines Patienten eingeführten medizinischen Instruments |
| US7998062B2 (en) | 2004-03-29 | 2011-08-16 | Superdimension, Ltd. | Endoscope structures and techniques for navigating to a target in branched structure |
| AU2003223085A1 (en) | 2002-04-17 | 2003-10-27 | Super Dimension Ltd. | Endoscope structures and techniques for navigating to a target in branched structure |
| US7697972B2 (en) * | 2002-11-19 | 2010-04-13 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| US7599730B2 (en) | 2002-11-19 | 2009-10-06 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| EP2460474B1 (en) * | 2003-05-08 | 2015-12-16 | Hitachi Medical Corporation | Reference image display method for ultrasonography and ultrasonic diagnosis apparatus |
| US7822461B2 (en) * | 2003-07-11 | 2010-10-26 | Siemens Medical Solutions Usa, Inc. | System and method for endoscopic path planning |
| US7398116B2 (en) | 2003-08-11 | 2008-07-08 | Veran Medical Technologies, Inc. | Methods, apparatuses, and systems useful in conducting image guided interventions |
| EP2316328B1 (en) | 2003-09-15 | 2012-05-09 | Super Dimension Ltd. | Wrap-around holding device for use with bronchoscopes |
| EP2245983A3 (en) * | 2003-10-31 | 2013-12-25 | Olympus Corporation | Insertion support system |
| WO2005053518A1 (ja) * | 2003-12-05 | 2005-06-16 | Olympus Corporation | 表示処理装置 |
| EP1691666B1 (en) | 2003-12-12 | 2012-05-30 | University of Washington | Catheterscope 3d guidance and interface system |
| JP4343723B2 (ja) * | 2004-01-30 | 2009-10-14 | オリンパス株式会社 | 挿入支援システム |
| WO2005079492A2 (en) | 2004-02-17 | 2005-09-01 | Traxtal Technologies Inc. | Method and apparatus for registration, verification, and referencing of internal organs |
| DE102004011156A1 (de) | 2004-03-08 | 2005-10-06 | Siemens Ag | Verfahren zur endoluminalen Bildgebung mit Bewegungskorrektur |
| US7772541B2 (en) * | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US7082183B2 (en) * | 2004-07-21 | 2006-07-25 | General Electric Company | Computed tomography dose indexing phantom selection for dose reporting |
| JP4578942B2 (ja) * | 2004-11-10 | 2010-11-10 | オリンパス株式会社 | 内視鏡形状検出装置 |
| EP1838378B1 (en) * | 2005-01-18 | 2017-03-22 | Philips Electronics LTD | Apparatus for guiding an instrument to a target in the lung |
| US7756563B2 (en) * | 2005-05-23 | 2010-07-13 | The Penn State Research Foundation | Guidance method based on 3D-2D pose estimation and 3D-CT registration with application to live bronchoscopy |
| US7889905B2 (en) | 2005-05-23 | 2011-02-15 | The Penn State Research Foundation | Fast 3D-2D image registration method with application to continuously guided endoscopy |
| WO2007023631A1 (ja) * | 2005-08-25 | 2007-03-01 | Olympus Medical Systems Corp. | 内視鏡挿入形状解析装置及び内視鏡挿入形状解析システム |
| JP2009507617A (ja) | 2005-09-14 | 2009-02-26 | ネオガイド システムズ, インコーポレイテッド | 経腔的及び他の操作を行うための方法及び装置 |
| US7981038B2 (en) * | 2005-10-11 | 2011-07-19 | Carnegie Mellon University | Sensor guided catheter navigation system |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US8989528B2 (en) | 2006-02-22 | 2015-03-24 | Hansen Medical, Inc. | Optical fiber grating sensors and methods of manufacture |
| IL181470A (en) * | 2006-02-24 | 2012-04-30 | Visionsense Ltd | Method and system for navigation within a flexible organ in the human body |
| US8199984B2 (en) * | 2006-05-02 | 2012-06-12 | National University Corporation Nagoya University | System that assists in observing a luminal organ using the structure of the luminal organ |
| WO2007137208A2 (en) * | 2006-05-19 | 2007-11-29 | Neoguide Systems, Inc. | Methods and apparatus for displaying three-dimensional orientation of a steerable distal tip of an endoscope |
| US20070293792A1 (en) * | 2006-06-15 | 2007-12-20 | Sliwa John W | Prostate BPH and tumor detector also useable on other tissues |
| JP5457178B2 (ja) | 2006-06-30 | 2014-04-02 | ブロンカス テクノロジーズ, インコーポレイテッド | 気道バイパス部位選択および治療計画 |
| US10279196B2 (en) * | 2006-09-28 | 2019-05-07 | Accuray Incorporated | Radiation treatment planning using four-dimensional imaging data |
| CN100435735C (zh) * | 2006-09-30 | 2008-11-26 | 南方医科大学 | 一种人体骨科手术导航系统 |
| US7996060B2 (en) * | 2006-10-09 | 2011-08-09 | Biosense Webster, Inc. | Apparatus, method, and computer software product for registration of images of an organ using anatomical features outside the organ |
| EP2086399B1 (en) | 2006-11-10 | 2017-08-09 | Covidien LP | Adaptive navigation technique for navigating a catheter through a body channel or cavity |
| WO2008097853A2 (en) | 2007-02-02 | 2008-08-14 | Hansen Medical, Inc. | Mounting support assembly for suspending a medical instrument driver above an operating table |
| US8903546B2 (en) * | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| CN101686825B (zh) * | 2007-06-21 | 2012-08-22 | 皇家飞利浦电子股份有限公司 | 使用动态模型调整用于动态医学成像的采集协议 |
| US8657757B2 (en) | 2007-07-26 | 2014-02-25 | Pulmone Advanced Medical Devices, Ltd. | System and methods for the measurement of lung volumes |
| EP2626027B1 (en) | 2007-08-14 | 2020-04-29 | Koninklijke Philips N.V. | Robotic instrument systems utilizing optical fiber sensors |
| JP5295555B2 (ja) * | 2007-12-10 | 2013-09-18 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US20090163800A1 (en) * | 2007-12-20 | 2009-06-25 | Siemens Corporate Research, Inc. | Tools and methods for visualization and motion compensation during electrophysiology procedures |
| US20090177089A1 (en) * | 2008-01-04 | 2009-07-09 | Assaf Govari | Three-dimensional image reconstruction using doppler ultrasound |
| WO2009097461A1 (en) | 2008-01-29 | 2009-08-06 | Neoguide Systems Inc. | Apparatus and methods for automatically controlling an endoscope |
| US9161817B2 (en) * | 2008-03-27 | 2015-10-20 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US20100152600A1 (en) | 2008-04-03 | 2010-06-17 | Kai Sensors, Inc. | Non-contact physiologic motion sensors and methods for use |
| US20090281452A1 (en) * | 2008-05-02 | 2009-11-12 | Marcus Pfister | System and method for a medical procedure using computed tomography |
| JP5372407B2 (ja) * | 2008-05-23 | 2013-12-18 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| JP5188879B2 (ja) * | 2008-05-23 | 2013-04-24 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US8218847B2 (en) * | 2008-06-06 | 2012-07-10 | Superdimension, Ltd. | Hybrid registration method |
| US7720322B2 (en) | 2008-06-30 | 2010-05-18 | Intuitive Surgical, Inc. | Fiber optic shape sensor |
| US20100063401A1 (en) * | 2008-09-09 | 2010-03-11 | Olympus Medical Systems Corp. | Ultrasound endoscope system and ultrasound observation method |
| US20110282151A1 (en) * | 2008-10-20 | 2011-11-17 | Koninklijke Philips Electronics N.V. | Image-based localization method and system |
| US10004387B2 (en) | 2009-03-26 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Method and system for assisting an operator in endoscopic navigation |
| US8337397B2 (en) * | 2009-03-26 | 2012-12-25 | Intuitive Surgical Operations, Inc. | Method and system for providing visual guidance to an operator for steering a tip of an endoscopic device toward one or more landmarks in a patient |
| EP3859682A1 (en) * | 2009-03-26 | 2021-08-04 | Intuitive Surgical Operations, Inc. | System for providing visual guidance for steering a tip of an endoscopic device towards one or more landmarks and assisting an operator in endoscopic navigation |
| EP2236104B1 (de) * | 2009-03-31 | 2013-06-19 | BrainLAB AG | Medizintechnische Navigations-Bildausgabe mit virtuellen Primärbildern und realen Sekundärbildern |
| US20110015648A1 (en) | 2009-07-16 | 2011-01-20 | Hansen Medical, Inc. | Endoscopic robotic catheter system |
| CN102883651B (zh) * | 2010-01-28 | 2016-04-27 | 宾夕法尼亚州研究基金会 | 可应用于支气管镜引导的基于图像的全局配准系统和方法 |
| EP2533678B1 (en) * | 2010-02-11 | 2020-03-25 | Intuitive Surgical Operations, Inc. | System for automatically maintaining an operator selected roll orientation at a distal tip of a robotic endoscope |
| WO2011102012A1 (ja) * | 2010-02-22 | 2011-08-25 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US8696549B2 (en) * | 2010-08-20 | 2014-04-15 | Veran Medical Technologies, Inc. | Apparatus and method for four dimensional soft tissue navigation in endoscopic applications |
| US20120099768A1 (en) * | 2010-10-20 | 2012-04-26 | Medtronic Navigation, Inc. | Method and Apparatus for Reconstructing Image Projections |
| US8827934B2 (en) | 2011-05-13 | 2014-09-09 | Intuitive Surgical Operations, Inc. | Method and system for determining information of extrema during expansion and contraction cycles of an object |
-
2011
- 2011-05-13 US US13/107,562 patent/US8900131B2/en active Active
-
2012
- 2012-04-27 KR KR1020137033281A patent/KR101930774B1/ko active IP Right Grant
- 2012-04-27 EP EP16155771.5A patent/EP3058889B1/en active Active
- 2012-04-27 EP EP12785960.1A patent/EP2709512B1/en active Active
- 2012-04-27 WO PCT/US2012/035390 patent/WO2012158324A2/en active Application Filing
- 2012-04-27 CN CN201610206139.0A patent/CN105919547B/zh active Active
- 2012-04-27 CN CN201280034693.5A patent/CN103648361B/zh active Active
-
2014
- 2014-11-03 US US14/531,016 patent/US20150148690A1/en not_active Abandoned
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000009502A (ja) * | 1998-06-26 | 2000-01-14 | Mitsubishi Electric Corp | 流量制御弁の流量測定装置 |
| JP2003245273A (ja) * | 2001-12-19 | 2003-09-02 | Koninkl Philips Electronics Nv | 脈管系における位置確認を支援する方法 |
Non-Patent Citations (1)
| Title |
|---|
| 일본 공표특허공보 특표2003-509145호(2003.03.11.) 1부. * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180000733A (ko) * | 2015-05-22 | 2018-01-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영상 안내 수술에서의 상관 보상의 시스템 및 방법 |
| KR20230082051A (ko) * | 2016-12-28 | 2023-06-08 | 아우리스 헬스, 인코포레이티드 | 가요성 기구 삽입을 위한 장치 |
| KR20190041902A (ko) * | 2017-10-13 | 2019-04-23 | 한양대학교 산학협력단 | 인공지능 기반의 자동 삽관 장치 및 그 구동 방법 |
| WO2019074331A3 (ko) * | 2017-10-13 | 2019-06-27 | 한양대학교 산학협력단 | 인공지능 기반의 자동 삽관 장치 및 그 구동 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120289777A1 (en) | 2012-11-15 |
| CN103648361B (zh) | 2016-12-07 |
| EP3058889A1 (en) | 2016-08-24 |
| WO2012158324A3 (en) | 2013-01-17 |
| CN103648361A (zh) | 2014-03-19 |
| EP3058889B1 (en) | 2017-11-29 |
| EP2709512A2 (en) | 2014-03-26 |
| EP2709512A4 (en) | 2016-04-27 |
| CN105919547A (zh) | 2016-09-07 |
| KR101930774B1 (ko) | 2018-12-19 |
| US8900131B2 (en) | 2014-12-02 |
| EP2709512B1 (en) | 2017-08-30 |
| US20150148690A1 (en) | 2015-05-28 |
| WO2012158324A2 (en) | 2012-11-22 |
| CN105919547B (zh) | 2018-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101930774B1 (ko) | 영상유도수술을 위해 해부학적 구조의 모델을 동적으로 등록시키는 의료 시스템 | |
| US12053144B2 (en) | Robotic systems for navigation of luminal networks that compensate for physiological noise | |
| US11423542B2 (en) | Systems and methods of registration for image-guided surgery | |
| US12004820B2 (en) | Systems and methods of registration for image-guided surgery | |
| KR102643758B1 (ko) | 생검 장치 및 시스템 | |
| US8827934B2 (en) | Method and system for determining information of extrema during expansion and contraction cycles of an object |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |