JP7608858B2 - 車両衝突回避支援装置 - Google Patents
車両衝突回避支援装置 Download PDFInfo
- Publication number
- JP7608858B2 JP7608858B2 JP2021023272A JP2021023272A JP7608858B2 JP 7608858 B2 JP7608858 B2 JP 7608858B2 JP 2021023272 A JP2021023272 A JP 2021023272A JP 2021023272 A JP2021023272 A JP 2021023272A JP 7608858 B2 JP7608858 B2 JP 7608858B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- avoidance
- steering
- host vehicle
- oncoming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/24—Direction of travel
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
図1に示したように、車両衝突回避支援装置10は、ECU90を備えている。ECUは、エレクトロニックコントロールユニットの略称である。ECU90は、マイクロコンピュータを主要部として備える。マイクロコンピュータは、CPU、ROM、RAM、不揮発性メモリ及びインターフェース等を含む。CPUは、ROMに格納されたインストラクション又はプログラム又はルーチンを実行することにより、各種機能を実現するようになっている。
又、自車両100には、駆動装置21、制動装置22及び操舵装置23が搭載されている。
駆動装置21は、自車両100を走行させるために自車両100に与えられる駆動力を出力する装置であり、例えば、内燃機関及びモータ等である。駆動装置21は、ECU90に電気的に接続されている。ECU90は、駆動装置21の作動を制御することにより駆動装置21から出力される駆動力を制御することができる。
制動装置22は、自車両100を制動するために自車両100に与えられる制動力を出力する装置であり、例えば、ブレーキ装置である。制動装置22は、ECU90に電気的に接続されている。ECU90は、制動装置22の作動を制御することにより制動装置22から出力される制動力を制御することができる。
操舵装置23は、自車両100を操舵するために自車両100に与えられる操舵力を出力する装置であり、例えば、パワーステアリング装置である。操舵装置23は、ECU90に電気的に接続されている。ECU90は、操舵装置23の作動を制御することにより操舵装置23から出力される操舵力を制御することができる。
更に、自車両100には、アクセルペダル操作量センサ61、ブレーキペダル操作量センサ62、操舵角センサ63、操舵トルクセンサ64、車速センサ65、縦加速度センサ66、横加速度センサ67及び周辺情報取得装置68が搭載されている。
アクセルペダル操作量センサ61は、ECU90に電気的に接続されている。アクセルペダル操作量センサ61は、アクセルペダル31の操作量を検出し、検出した操作量の情報をECU90に送信する。ECU90は、その情報に基づいてアクセルペダル31の操作量をアクセルペダル操作量APとして取得する。ECU90は、アクセルペダル操作量AP及び自車両100の車速Vから要求駆動力PDreqを演算により取得する。要求駆動力PDreqは、駆動装置21に出力が要求される駆動力である。
ブレーキペダル操作量センサ62は、ECU90に電気的に接続されている。ブレーキペダル操作量センサ62は、ブレーキペダル32の操作量を検出し、検出した操作量の情報をECU90に送信する。ECU90は、その情報に基づいてブレーキペダル32の操作量をブレーキペダル操作量BPとして取得する。ECU90は、ブレーキペダル操作量BPから要求制動力PBreqを演算により取得する。要求制動力PBreqは、制動装置22に出力が要求される制動力である。
操舵角センサ63は、ECU90に電気的に接続されている。操舵角センサ63は、自車両100のハンドル33の中立位置に対するハンドル33の回転角度を検出し、検出した回転角度の情報をECU90に送信する。ECU90は、その情報に基づいて中立位置に対する自車両100のハンドル33の回転角度を操舵角SAとして取得する。
操舵トルクセンサ64は、ECU90に電気的に接続されている。操舵トルクセンサ64は、運転者がハンドル33を介してステアリングシャフト34に入力したトルクを検出し、検出したトルクの情報をECU90に送信する。ECU90は、その情報に基づいて運転者がハンドル33を介してステアリングシャフト34に入力したトルクをドライバー入力トルクTQdrとして取得する。
車速センサ65は、ECU90に電気的に接続されている。車速センサ65は、自車両100の各車輪の回転速度を検出し、検出した各車輪の回転速度の情報をECU90に送信する。ECU90は、その情報に基づいて自車両100の走行速度を車速Vとして取得する。
縦加速度センサ66は、ECU90に電気的に接続されている。縦加速度センサ66は、自車両100の前後方向の加速度を検出し、検出した加速度の情報をECU90に送信する。ECU90は、その情報に基づいて自車両100の前後方向の加速度を縦加速度Gxとして取得する。
横加速度センサ67は、ECU90に電気的に接続されている。横加速度センサ67は、自車両100の横方向(幅方向)の加速度を検出し、検出した加速度の情報をECU90に送信する。ECU90は、その情報に基づいて自車両100の横方向の加速度を横加速度Gyとして取得する。
周辺情報取得装置68は、自車両100の周辺の情報を検出する装置であり、例えば、カメラ、レーダセンサ(ミリ波レーダ等)、超音波センサ(クリアランスソナー)及びレーザーレーダ(LiDAR)等を含んでいる。
次に、車両衝突回避支援装置10の作動の概要について説明する。車両衝突回避支援装置10は、自車両100の走行中、自車両100の進行方向前方に物体が存在するか否かを周辺情報I_S(特に、自車両100の前方の情報)に基づいて判定している。より具体的には、車両衝突回避支援装置10は、自車両100の走行中、周辺情報I_Sに基づいて自車走行領域A100に物体200が存在するか否かを判定している。自車走行領域A100は、図3に示したように、自車両100の走行ルートR100を中心として自車両100の幅に等しい幅を有する領域である。自車両100の走行ルートR100は、自車両100がその時点の操舵角SAを維持したまま走行したときに自車両100が走行するルートである。尚、本例において、物体は、車両、人、自転車及びガードレール等である。
車両衝突回避支援装置10は、以下のようにして並走車走行領域A201を取得する。
又、車両衝突回避支援装置10は、以下のようにして対向車走行領域A202を取得する。
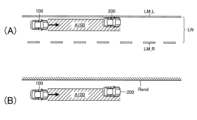
車両衝突回避支援装置10は、回避操舵を終了する条件(回避操舵終了条件)が成立した場合、回避操舵を終了する。例えば、左右区画線LMが認識できている場合、回避操舵の開始後、図15の(A)に示したように、自車両100が物体200の横を通過しているときに回避操舵を終了させても、自車両100が物体200に衝突することはない。同様に、左右区画線LMが認識できていない場合も、回避操舵の開始後、図15の(B)に示したように、自車両100が物体200の横を通過しているときに回避操舵を終了させても、自車両100が物体200に衝突することはない。そこで、回避操舵終了条件として、例えば、回避操舵の開始後、自車両100が物体200の横を通過しているとの条件が設定される。
自車線LNの隣の車線(隣接車線)が並走車線である場合、隣接車線が対向車線である場合に比べ、自車両100が物体200との衝突を回避するためにその隣接車線に進入しても、比較的安全である。従って、回避走行領域Atgtが並走車走行領域A201に重なっている場合、自車両100が物体200との衝突を回避するために進入しようとしている隣接車線が並走車線であるので、自車両100がその隣接車線に進入しても、比較的安全である。車両衝突回避支援装置10によれば、回避走行領域Atgtが対向車走行領域A202に重なっている場合には、回避操舵は実施されないが、回避走行領域Atgtが並走車走行領域A201に重なっている場合には、回避操舵は実施される。従って、自車両100と物体200との衝突を回避操舵により回避するときに自車両100を自車線LN内で走行させることができない場合でも、回避操舵が実施される。このため、自車線LNを特定できない場合でも、自車両100と物体200との衝突を安全に回避することができる。
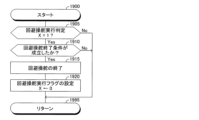
次に、車両衝突回避支援装置10の具体的な作動について説明する。車両衝突回避支援装置10のECU90のCPUは、図16に示したルーチンを所定時間の経過毎に実行するようになっている。従って、所定のタイミングになると、CPUは、図16のステップ1600から処理を開始し、その処理をステップ1605に進め、回避操舵実行フラグXの値が「0」であるか否かを判定する。回避操舵実行フラグXの値は、回避操舵が開始されたときに「1」に設定され、回避操舵が終了されたときに「0」に設定される。
例えば、車両衝突回避支援装置10は、回避経路設定条件が成立したときに左右区画線LMを周辺情報I_Sから認識できているか否かを判断せず、目標回避経路Rtgtを設定し、その目標回避経路Rtgtに基づいて取得した回避走行領域Atgtが対向車走行領域A202又は並走車走行領域A201と重なっているか否かに応じて回避操舵を許可したり禁止したりするように構成されてもよい。
本発明の実施形態に係る車両衝突回避支援装置10と同様に、変形例に係る車両衝突回避支援装置10によれば、回避走行領域Atgtが対向車走行領域A202に重なっている場合には、回避操舵は実施されないが、回避走行領域Atgtが並走車走行領域A201に重なっている場合には、回避操舵は実施される。従って、自車両100と物体200との衝突を回避操舵により回避するときに自車両100を自車線LN内で走行させることができない場合でも、自車両100と物体200との衝突を回避するための回避操舵が実施される。このため、自車線LNを特定できない場合でも、自車両100と物体200との衝突を安全に回避することができる。
Claims (4)
- 自車両がその前方に存在する物体に衝突する可能性がある場合において、回避経路設定条件が成立したときに前記自車両が走行している車線である自車線を特定することができているときには、前記自車両と前記物体との衝突を回避可能な回避経路であって前記自車両が前記物体を避けて当該物体の横を通過でき且つ前記自車両が前記自車線内で走行する回避経路を第1の目標回避経路として設定し、該第1の目標回避経路に沿って前記自車両が走行するように前記自車両を強制的に操舵する第1の回避操舵を開始する第1の回避操舵開始条件が成立したときに前記第1の回避操舵を実施するように構成された車両衝突回避支援装置において、
前記自車両の隣で走行する他車両が並走車であるときには該並走車が走行するときに該並走車が占める走行領域を並走車走行領域として記憶しておき、
前記他車両が対向車であるときには該対向車が走行するときに該対向車が占める走行領域を対向車走行領域として記憶しておき、
前記自車両が前記物体に衝突する可能性がある場合において、前記回避経路設定条件が成立したときに前記自車線を特定することができていないときには、前記自車両と前記物体との衝突を回避可能な回避経路であって前記自車両が前記物体を避けて当該物体の横を通過できる回避経路を第2の目標回避経路として設定し、該第2の目標回避経路に沿って前記自車両が走行したと仮定したときに前記自車両が占める走行領域を回避走行領域として取得し、
前記取得した回避走行領域が前記記憶してある対向車走行領域に重なっている場合には、前記第2の目標回避経路に沿って前記自車両が走行するように前記自車両を強制的に操舵する第2の回避操舵を開始する第2の回避操舵開始条件が成立しても、前記第2の回避操舵を実施せず、
前記取得した回避走行領域が前記記憶してある並走車走行領域に重なっている場合には、前記第2の回避操舵開始条件が成立したときに、前記第2の回避操舵を実施し、
前記取得した回避走行領域が前記対向車走行領域にも前記並走車走行領域にも重なっていない場合、前記第2の回避操舵開始条件が成立しても、前記第2の回避操舵を実施しない、
ように構成されている、
車両衝突回避支援装置。 - 請求項1に記載の車両衝突回避支援装置において、
前記自車両の周辺の情報を取得する周辺情報取得装置を備え、
前記周辺の情報に基づいて前記並走車を検知した場合、異なる時刻における当該並走車の前記自車両に対する相対位置を記憶し、これら相対位置をそれぞれ記憶してから前記自車両が走行した距離に基づいてこれら相対位置をそれぞれ記憶したときの当該並走車の走行路面上での位置に変換し、これら変換した位置から前記並走車の走行軌跡を取得し、該取得した走行軌跡から前記並走車走行領域を取得し、
前記周辺の情報に基づいて前記対向車を検知した場合、異なる時刻における当該対向車の前記自車両に対する相対位置を記憶し、これら相対位置をそれぞれ記憶してから前記自車両が走行した距離に基づいてこれら相対位置をそれぞれ記憶したときの当該対向車の走行路面上での位置に変換し、これら変換した位置から前記対向車の走行軌跡を取得し、該取得した走行軌跡から前記対向車走行領域を取得する、
ように構成されている、
車両衝突回避支援装置。 - 請求項1又は請求項2に記載の車両衝突回避支援装置において、
前記回避経路設定条件は、前記自車両と前記物体との間の距離が所定距離以下になったときに成立する、
車両衝突回避支援装置。 - 請求項1乃至請求項3の何れか一項に記載の車両衝突回避支援装置において、
前記回避操舵開始条件は、前記自車両が前記物体に到達するのに要すると予測される時間が所定時間以下になったときに成立する、
車両衝突回避支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021023272A JP7608858B2 (ja) | 2021-02-17 | 2021-02-17 | 車両衝突回避支援装置 |
| US17/648,024 US20220258730A1 (en) | 2021-02-17 | 2022-01-14 | Vehicle collision-avoidance assist device |
| CN202210089925.2A CN114940167B (zh) | 2021-02-17 | 2022-01-25 | 车辆碰撞回避辅助装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021023272A JP7608858B2 (ja) | 2021-02-17 | 2021-02-17 | 車両衝突回避支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022125597A JP2022125597A (ja) | 2022-08-29 |
| JP7608858B2 true JP7608858B2 (ja) | 2025-01-07 |
Family
ID=82801955
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021023272A Active JP7608858B2 (ja) | 2021-02-17 | 2021-02-17 | 車両衝突回避支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220258730A1 (ja) |
| JP (1) | JP7608858B2 (ja) |
| CN (1) | CN114940167B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11897468B2 (en) * | 2020-03-03 | 2024-02-13 | Ford Global Technologies, Llc | Vehicle control system |
| JP7559656B2 (ja) * | 2021-04-05 | 2024-10-02 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| JP7813171B2 (ja) * | 2022-03-31 | 2026-02-12 | 株式会社Subaru | 車両の運転支援装置、及び、車両の運転支援システム |
| JP2025031020A (ja) * | 2023-08-25 | 2025-03-07 | トヨタ自動車株式会社 | 操舵支援装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007083818A (ja) | 2005-09-21 | 2007-04-05 | Honda Motor Co Ltd | 運転支援装置 |
| JP2007245953A (ja) | 2006-03-16 | 2007-09-27 | Honda Motor Co Ltd | 運転支援装置 |
| JP2008162456A (ja) | 2006-12-28 | 2008-07-17 | Daihatsu Motor Co Ltd | 自動制動装置 |
| JP2017043262A (ja) | 2015-08-28 | 2017-03-02 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP2019119216A (ja) | 2017-12-28 | 2019-07-22 | 株式会社Soken | 車両走行制御装置、車両走行制御システムおよび車両走行制御方法 |
| JP2019123377A (ja) | 2018-01-17 | 2019-07-25 | マツダ株式会社 | 車両制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2518187A (en) * | 2013-09-12 | 2015-03-18 | Ford Global Tech Llc | Collision warning for a driver controlled vehicle |
| BR112017002416B1 (pt) * | 2014-08-11 | 2021-11-30 | Nissan Motor Co., Ltd | Dispositivo de controle de deslocamento e método de controle de deslocamento |
| JP2017134520A (ja) * | 2016-01-26 | 2017-08-03 | トヨタ自動車株式会社 | 車両用衝突回避支援システム |
| CN107444406A (zh) * | 2016-05-30 | 2017-12-08 | 奥迪股份公司 | 车辆辅助驾驶系统及方法 |
| JP6961995B2 (ja) * | 2017-05-12 | 2021-11-05 | トヨタ自動車株式会社 | 運転支援装置 |
| JP6564424B2 (ja) * | 2017-06-09 | 2019-08-21 | 株式会社Subaru | 車両制御装置 |
| JP6791093B2 (ja) * | 2017-10-23 | 2020-11-25 | 株式会社デンソー | 自動運転制御装置、車両の自動運転制御方法 |
| DE102018130243A1 (de) * | 2018-11-29 | 2020-06-04 | Valeo Schalter Und Sensoren Gmbh | Erweitertes Szenario für Autobahnassistenten |
| KR20210000994A (ko) * | 2019-06-26 | 2021-01-06 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP7200871B2 (ja) * | 2019-07-25 | 2023-01-10 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| US11465619B2 (en) * | 2020-05-27 | 2022-10-11 | Zoox, Inc. | Vehicle collision avoidance based on perturbed object trajectories |
-
2021
- 2021-02-17 JP JP2021023272A patent/JP7608858B2/ja active Active
-
2022
- 2022-01-14 US US17/648,024 patent/US20220258730A1/en not_active Abandoned
- 2022-01-25 CN CN202210089925.2A patent/CN114940167B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007083818A (ja) | 2005-09-21 | 2007-04-05 | Honda Motor Co Ltd | 運転支援装置 |
| JP2007245953A (ja) | 2006-03-16 | 2007-09-27 | Honda Motor Co Ltd | 運転支援装置 |
| JP2008162456A (ja) | 2006-12-28 | 2008-07-17 | Daihatsu Motor Co Ltd | 自動制動装置 |
| JP2017043262A (ja) | 2015-08-28 | 2017-03-02 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP2019119216A (ja) | 2017-12-28 | 2019-07-22 | 株式会社Soken | 車両走行制御装置、車両走行制御システムおよび車両走行制御方法 |
| JP2019123377A (ja) | 2018-01-17 | 2019-07-25 | マツダ株式会社 | 車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220258730A1 (en) | 2022-08-18 |
| CN114940167A (zh) | 2022-08-26 |
| CN114940167B (zh) | 2025-07-29 |
| JP2022125597A (ja) | 2022-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7608858B2 (ja) | 車両衝突回避支援装置 | |
| JP6387948B2 (ja) | 車両の運転支援装置 | |
| CN112977436B (zh) | 驾驶支援装置 | |
| JP7470588B2 (ja) | 衝突回避支援装置 | |
| JP7443177B2 (ja) | 衝突回避支援装置 | |
| JP7115381B2 (ja) | 衝突前制御装置 | |
| CN116714576A (zh) | 驾驶支援装置、驾驶支援方法以及程序 | |
| JP6372663B2 (ja) | 車両の制御装置 | |
| CN113942501B (zh) | 车辆控制装置 | |
| JP7593815B2 (ja) | 車両衝突回避支援装置 | |
| CN114789724B (zh) | 车辆碰撞回避支援装置 | |
| JP6241673B2 (ja) | 車両の制御装置 | |
| US20220032908A1 (en) | Driving support control device for vehicle | |
| KR102717372B1 (ko) | 차량 충돌 회피 지원 장치 | |
| US11820367B2 (en) | Turning controller for vehicle, computer-readable medium storing turning control program, and turning control method for vehicle | |
| JP7647644B2 (ja) | 運転支援装置、運転支援方法及び運転支援プログラム | |
| US12304472B2 (en) | Driving assist method and driving assist device for vehicle and medium | |
| US12252117B2 (en) | Vehicle driving assistance apparatus, vehicle driving assistance method, and computer-readable storage medium storing vehicle driving assistance program | |
| JP2024112043A (ja) | 車両の運転支援方法及び運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230912 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7608858 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |