JP7549003B2 - 粉体を無菌的に移し替えるための封じ込め装置を備える装置 - Google Patents
粉体を無菌的に移し替えるための封じ込め装置を備える装置 Download PDFInfo
- Publication number
- JP7549003B2 JP7549003B2 JP2022513989A JP2022513989A JP7549003B2 JP 7549003 B2 JP7549003 B2 JP 7549003B2 JP 2022513989 A JP2022513989 A JP 2022513989A JP 2022513989 A JP2022513989 A JP 2022513989A JP 7549003 B2 JP7549003 B2 JP 7549003B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- powder
- tool
- working chamber
- tool carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000843 powder Substances 0.000 title claims description 98
- 238000003860 storage Methods 0.000 claims description 42
- 238000004140 cleaning Methods 0.000 claims description 26
- 230000001954 sterilising effect Effects 0.000 claims description 24
- 238000000034 method Methods 0.000 claims description 21
- 238000005070 sampling Methods 0.000 claims description 19
- 238000004659 sterilization and disinfection Methods 0.000 claims description 18
- 238000012360 testing method Methods 0.000 claims description 18
- 238000005303 weighing Methods 0.000 claims description 12
- 238000003032 molecular docking Methods 0.000 claims description 7
- 239000000463 material Substances 0.000 claims description 6
- 230000000295 complement effect Effects 0.000 claims description 4
- 238000009408 flooring Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 5
- 238000005202 decontamination Methods 0.000 description 2
- 230000003588 decontaminative effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 238000005429 filling process Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
Images






























































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B55/00—Preserving, protecting or purifying packages or package contents in association with packaging
- B65B55/02—Sterilising, e.g. of complete packages
- B65B55/027—Packaging in aseptic chambers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0028—Gripping heads and other end effectors with movable, e.g. pivoting gripping jaw surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
- B25J15/0433—Connections means having gripping members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0491—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof comprising end-effector racks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/10—Gripping heads and other end effectors having finger members with three or more finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J21/00—Chambers provided with manipulation devices
- B25J21/005—Clean rooms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B1/00—Packaging fluent solid material, e.g. powders, granular or loose fibrous material, loose masses of small articles, in individual containers or receptacles, e.g. bags, sacks, boxes, cartons, cans, or jars
- B65B1/04—Methods of, or means for, filling the material into the containers or receptacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B1/00—Packaging fluent solid material, e.g. powders, granular or loose fibrous material, loose masses of small articles, in individual containers or receptacles, e.g. bags, sacks, boxes, cartons, cans, or jars
- B65B1/30—Devices or methods for controlling or determining the quantity or quality or the material fed or filled
- B65B1/36—Devices or methods for controlling or determining the quantity or quality or the material fed or filled by volumetric devices or methods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B31/00—Packaging articles or materials under special atmospheric or gaseous conditions; Adding propellants to aerosol containers
- B65B31/02—Filling, closing, or filling and closing, containers or wrappers in chambers maintained under vacuum or superatmospheric pressure or containing a special atmosphere, e.g. of inert gas
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/46—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B69/00—Unpacking of articles or materials, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B7/00—Closing containers or receptacles after filling
- B65B7/16—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons
- B65B7/168—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons by applying and securing double closures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B7/00—Closing containers or receptacles after filling
- B65B7/16—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons
- B65B7/28—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons by applying separate preformed closures, e.g. lids, covers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B7/00—Closing containers or receptacles after filling
- B65B7/16—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons
- B65B7/28—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons by applying separate preformed closures, e.g. lids, covers
- B65B7/2821—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons by applying separate preformed closures, e.g. lids, covers applying plugs or threadless stoppers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B7/00—Closing containers or receptacles after filling
- B65B7/16—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons
- B65B7/28—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons by applying separate preformed closures, e.g. lids, covers
- B65B7/2842—Securing closures on containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B2210/00—Specific aspects of the packaging machine
- B65B2210/06—Sterilising or cleaning machinery or conduits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B55/00—Preserving, protecting or purifying packages or package contents in association with packaging
- B65B55/24—Cleaning of, or removing dust from, containers, wrappers, or packaging ; Preventing of fouling
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Chemical & Material Sciences (AREA)
- Dispersion Chemistry (AREA)
- Quality & Reliability (AREA)
- Basic Packing Technique (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Manipulator (AREA)
- Control And Other Processes For Unpacking Of Materials (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Sampling And Sample Adjustment (AREA)
Description
-空にすべき容器から粉体の残りを落とすするためのバイブレータ;
-空にすべき容器に第2閉鎖要素がある場合にそれを取り除くためのリッパーフック;及び、
-検査目的のために粉体の試料を採取するサンプリングツール。
-粉体が充填された容器の中身を回収容器に空ける工程においては、粉体が充填された容器の出発状態と、空になった容器との間の比較、又は、
-空の容器に貯蔵容器から粉体を充填する工程においては、空の容器の出発状態と、粉体が充填された容器との間の比較。
図2-図1の装置の装置において、粉体が充填された容器の中身を回収容器に空けるための配置図。
図3A-粉体が充填された、図1及び図2の容器の拡大図。
図3B-図1及び図2に図示された、充填すべき回収容器の拡大図。
図4Aから図4E-図1及び図2に図示されたツールキャリアに様々な装備品が取り付けられている図。
図4A-図1及び図2に図示された、常備基本装備品が取り付けられたツールキャリアの拡大正面図。
図4B-さらなる常備装備品が取り付けられた、図4Aのツールキャリアの拡大上面図。
図4C-基本装備品及び一時的に取り付けられた吸引ツールを備えた図4Aのツールキャリアの図。
図4D-基本装備品及び一時的に取り付けられた洗浄ツールを備えた、図4Aのツールキャリアの図。
図4E-基本装備品及び一時的に取り付けられたつば出しツールを備えた、図4Aのツールキャリアの図。
図5Aから図5C-図4Aによるツールキャリアと、図1による回収容器もしくは貯蔵容器の移送ヘッドとからなるダブルフラップの構造及び機能を原理的に表現した図。
図5A-ダブルフラップの受動部及びそれに近づく能動部の図。
図5B-図5Aのダブルフラップの受動部と能動部とが組み立てられた状態で、遮断位置にある図。
図5C-図5Bのダブルフラップが開いた位置にある図。
図6Aから図6R-図2に示すように、粉体が充填された容器の中身を回収容器に空ける際の段階的な移し替え工程を示した図。
図7-図1に示す装置において、貯蔵容器から容器に粉体充填物を充填するための配置図。
図8Aから図8M-図7に示すように、貯蔵容器から容器に粉体充填物を充填する際の段階的な工程を示した図。
図9Aから図9C-図4Aに図示した無菌ツールキャリアを封じ込め装置に運び入れる際の段階的な工程の原理図。
図10Aから図10G-ツールキャリア及び回収容器を殺菌する際の段階的な工程の第1変形例の原理図。
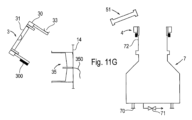
図11Aから図11H-ツールキャリア及び回収容器を殺菌する際の段階的な工程の第2変形例の原理図。
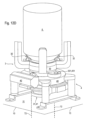
図12A-図1より、封じ込め装置の床に設置された移送ヘッド及び、それに近づくツールキャリアを斜視図で表した図。
図12B-図12Aに示す配置において、組み立てられた状態の図。
図12C-図6Gのように倒立した状態で容器がクランプされている図12Aのツールキャリアの図。
図12D-図12Cの配置において図12Aの移送ヘッドが組み立てられた図。
ここに図示された、粉体9を無菌的に移し替えるための封じ込め装置1を備えた装置は、粉体9が充填された容器6の中身を回収容器7に空けるため、及び/又は、容器6に貯蔵容器8から粉体9を充填するための装置の適性に応じたものであり、本発明の概要を説明することを目的として表現されている。封じ込め装置1は、ハウジング10によって囲まれており、それにより作業室11を封じ込めており、作業室内には、土台18の上に載せられ、アーム機構19を有するロボット17(ここでは多関節アームロボットとして提供されている)がある。作業室11には、H2O2溶液スプレーなどの除染剤を導入するための供給管15がつながっている。
ここでは図1の装置について、粉体9で完全に満たされた容器6の中身を、容器から出されるべき粉体9を受け入れる回収容器7に空ける機能に限定して図示されている。ロボット17のアーム機構19は、ツールキャリア3に接続されている。
空にすべき容器6には粉体9が入っており、少なくとも第1閉鎖要素61が設けられており、場合によってはその上に第2閉鎖要素62も取り付けられている。これに対して、充填された容器6は、多くの場合、第1閉鎖要素61のみを用いて閉鎖されている。回収容器7の入口に移送ヘッド4が取り付けられており、移送ヘッドは、ベース40とダブルフラップの能動部41を有しており、これらは駆動部42によって調整可能である。
これらの図には、様々な装備品が装備されたツールキャリア3が示されている。ツールキャリア3はそのベース30に少なくとも、容器6を把持するためのクランプ要素32、第1閉鎖要素61及びダブルフラップの受動部31を把持するためのバキュームリフター33を有している。アーム機構19に接続するために、ツールキャリア3のベース30は接続フランジ300を有しており、接続フランジ300内には秤量セル302を設置することができる。ベース30は位置決め部材301を有しており、この位置決め部材は、移送ヘッド4のベース40に配置されている相補的なロッキング部材401に形状結合的及び摩擦結合的に接続するためのものであり、また、ツールキャリア3と移送ヘッド4との間の耐圧的な組み付けを確保するためのものである(図12A~図12D参照)。
-空にすべき容器6から粉体(9)の残りを落とすためのバイブレータ37;
-空にすべき容器6に場合によっては取り付けられている第2閉鎖要素62を取り除くためのリッパーフック38;
-検査目的で粉体9の試料を採取するためのサンプリングツール39
を有している。
これらの図は、粉体9が充填された容器6の中身を回収容器7に空ける際の段階的な移し替え工程を示している。
図6A:ツールキャリア3に設けられたトゲ状のリッパーフック38によって、第2閉鎖要素62がとらえられ、粉体9が充填された容器6から取り外される。
図6B:ツールキャリア3に設けられたバキュームリフター33によって第1閉鎖要素61が把持される。
図6C:ツールキャリア3に設けられたバキュームリフター33によって第1閉鎖要素61が取り外される。
図6D:追加の吸引ツール34′により、第1閉鎖要素61に付着している可能性のある粉体9が吸引される。
図6E:ツールキャリア3に設けられたサンプリングツール39を用いて、粉体9の試料が採取される。
図6F:採取された粉体9の試料は、検査のために試料容器90に入れられる。
図6G:ツールキャリア3が容器6に載せられる。
図6H:接続フランジ300内の秤量セル302により総重量が求められる。
図6J:容器6を空にするために、容器6は倒立させて回収容器7の移送ヘッド4に接続される。
図6K:駆動装置42によりダブルフラップ31、41が開位置に動かされ、粉体9が導管部72を通って回収容器7内に流入する。
図6L:容器の中身が空けられて、容器6は空になり、すべての粉体9が回収容器7に流れ込んでいる。バイブレータ7を作動させることにより(図4B参照)、容器6内に残っている可能性のある粉体9も落とされる。
図6M:ツールキャリア3付きの空の容器6が、回収容器7の移送ヘッド4から分離される。
図6N:ツールキャリア3が空の容器6に載せられる。接続フランジ300内の秤量セル302により空の状態の重量が求められる。
図6O:ツールキャリア3内に挿入された吸引ツール34を用いて、ツールキャリア3、特にダブルフラップの受動部31の内部が洗浄される。
図6P:ツールキャリア3は、そのバキュームリフター33を用いて第1閉鎖要素61を把持する。
図6Q:第1閉鎖要素61が空の容器6に載せられる。
図6R:容器を空にする工程が完了し、第1閉鎖要素61で閉鎖された、空の容器6をここから搬送することができる。
ここでは、図1に図示された装置が、空の容器6に貯蔵容器8から粉体9を充填する機能に限定して図示されている。第1閉鎖要素61が持ち上げられており、容器6は開いた状態であることが示されている。
これらの図には、空の容器6に貯蔵容器8から粉体9を充填する際の、段階的な詰め替え作業が示されている。
図8A:ツールキャリア3にあるバキュームリフター33を用いて、空の容器6の第1閉鎖要素61が把持される。
図8B:第1閉鎖要素61が持ち上げられる。
図8C:開いた容器6にツールキャリア3が載せられ、接続フランジ300内の秤量セル302を用いて空の状態の重量が求められる。
図8D:ツールキャリア3を載せた容器6が、貯蔵容器8の移送ヘッド4に近づけられる。
図8E:ツールキャリア3を載せた容器6が、貯蔵容器8の移送ヘッド4にドッキングされる。
図8F:ダブルフラップ31、41が駆動部42により開位置に動き、粉体9が計量装置80から容器6に流入する。
図8G:容器6が充填され、ダブルフラップ31、41が駆動装置42により閉位置に動く。
図8H:移送ヘッド4が載せられた、充填された容器6は、貯蔵容器8の移送ヘッドからドッキングを解除される。接続フランジ300内の秤量セル302によって総重量が求められる。
図8J:ツールキャリア3にあるバキュームリフター33を用いて第1閉鎖要素61が把持され、充填された容器6の上に載せられる。
図8K:ツールキャリア3にドッキングされたつば出しツール36を用いて、第2閉鎖要素62が準備される。
図8L:つば出しツール36が、充填された容器6に載せられる。
図8M;第2閉鎖要素62は、第1閉鎖要素61の上で、充填された容器6に取り付けられる。充填工程が完了し、確実に閉鎖された容器6をここから搬送することができる。
これらの図には、第1変形例において、ツールキャリア3及び回収容器7を殺菌するための工程が段階的に示されている。
図10A:ツールキャリア3により洗浄・殺菌ツール35が把持される。
図10B:ツールキャリア3と洗浄・殺菌ツール35とからなるアセンブリが、回収容器7の移送ヘッド4に近づけられる。
図10C:ツールキャリア3が回収容器7の移送ヘッド4に接続されており、ダブルフラップ31、41は閉位置にある。
図10D: ダブルフラップ31、41が開かれ、ダブルフラップ31、41及び回収容器7の洗浄及び殺菌が行われる。
図10E:洗浄及び殺菌が完了し、ダブルフラップ31、41が閉じられる。
図10F:洗浄・殺菌ツール35が取り付けられたツールキャリア3が、回収容器7の移送ヘッド4から持ち上げられる。
図10G:ツールキャリア3に付いている洗浄・殺菌ツール35が、パークステーション14に戻される。
これらの図には、第2の変形例においてツールキャリア3及び回収容器7を殺菌する工程が段階的に示されている。ここでも洗浄・殺菌ツール35の使用にはツールキャリア3が用いられるが、ダブルフラップの2つの部品31、41は取り外して擬似部品51で置き換える必要がある。
移送ヘッド4は封じ込め装置1のハウジング10に、好ましくは床に設置され、ツールキャリア3は上方から接近する。ツールキャリア3にある位置決め部材301は、ロッキング部材401に係合するよう向きが合わされている。移送ヘッド4の出口からは、導管部72が封じ込め装置1から回収容器7内へと延びている(図1参照)。ツールキャリア3と移送ヘッド4とが組み立てられた状態においては、位置決め部材301とロッキング部材401とがしっかりとロックされているため、ツールキャリア3と移送ヘッド4とは互いに耐圧的に接続されている。
ツールキャリア3のクランプ要素32は、倒立させた容器6をツールキャリア3上に載せる際、もしくは、ツールキャリア3から持ち上げる際には解放位置にあり(図12C参照)、これに対して移し替え工程においてはクランプ位置にある(図12D参照)。
本発明では以下の形態が可能である。
形態1
粉体(9)を無菌的に移し替えるため、すなわち、粉体(9)が充填された容器(6)の中身を回収容器(7)に空けるため、及び/又は、貯蔵容器(8)から粉体(9)を容器(6)に充填するために封じ込め装置(1)を備える設置であって、
a)封じ込め装置(1)は、ハウジング(10)に囲まれた作業室(11)を有しており、
b)封じ込め装置(1)内にはロボット(3)が設置されており、ロボット(3)は、旋回範囲にわたって動かせるアーム機構(31))を有しており、
c)回収容器(7)が存在する場合、回収容器(7)は作業室(11)から供給を受ける入口を有しており、また、貯蔵容器(8)が存在する場合、貯蔵容器(8)は作業室(11)へと供給を行う出口を有しており、
d)容器(6)は、少なくとも第1閉鎖要素(61)を用いて閉鎖可能である、装置において、
e)アーム機構(31)はツールキャリア(3)に接続されており、ツールキャリア(3)のベース(30)には少なくとも、容器(6)を把持するためのクランプ要素(32)、第1閉鎖要素(61)を把持するためのバキュームリフター(33)、及び、ダブルフラップの受動部(31)が備えられており、
f)回収容器(7)への入口及び/又は貯蔵容器(8)の出口には移送ヘッド(4)が取り付けられていてそれぞれが作業室(11)内に突出しており、
g)受動部(31)は、移送ヘッド(4)内に含まれている能動部(41)と共にダブルフラップを形成することを特徴とする装置。
形態2
形態1に記載の装置であって、
a)ツールキャリア(3)のベース(30)が、アーム機構(19)に接続するための接続フランジ(300)を有しており、接続フランジ(300)には秤量セル(302)を設置することができ、及び、
b)ベース(30)には位置決め部材(301)が設けられており、位置決め部材(301)は、移送ヘッド(4)のベース(40)に配置された相補的なロッキング部材(401)に確動的及び摩擦結合的に接続するためのものであり、また、ツールキャリア(3)と移送ヘッド(4)との間の耐圧的な組み付けを確保するものであることを特徴とする装置。
形態3
形態1又は2に記載の装置であって、
a)ツールキャリア(3)のベース(30)は、吸引ツール(34)又は洗浄・殺菌ツール(35)又はつば出しツール(36)を一時的に収容できるようになっており、
b)ツール(34、35、36)をツールキャリア(3)のベース(30)に固定する役割はクランプ要素(32)が単独で又は追加的に担っており、
c)吸引ツール(34)は、作業室(11)内においてツールキャリア(3)及び第1閉鎖要素(61)を洗浄し、
d)洗浄・殺菌ツール(35)は、作業室(11)内においてダブルフラップの受動部(31)及び能動部(41)も含めて回収容器(7)の洗浄及び殺菌を行い、及び、
e)つば出しツール(36)は、作業室(11)内において第2閉鎖要素(62)を容器(6)に取り付けることを特徴とする装置。
形態4
形態3に記載の装置であって、
ツール(34、35、36)は、作業室(11)内においてパークステーション(14)に着脱可能に置かれており、ロボット(17)のアーム機構(19)に設けられたツールキャリア(3)により把持されて使用されることを特徴とする装置。
形態5
形態1~4のいずれか1に記載の装置であって、完全に装備された状態のツールキャリア(3)は、以下のもの;
a)空にすべき容器(6)から粉体(9)の残りを落とすためのバイブレータ(37);
b)空にすべき容器(6)に第2閉鎖要素(62)が存在する場合には、これを取り除くためのリッパーフック(38)、及び
c)検査目的で粉体(9)の試料を採取するためのサンプリングツール(39)も有することを特徴とする装置。
形態6
形態1及び3に記載の装置であって、
a)第1閉鎖要素(61)は、容器(6)の口に載せられる蓋又は容器(6)の口に挿入される栓として構成されており、また、
b)第2閉鎖要素(62)は、第1閉鎖要素(61)の上において容器(6)に取り付けられるフランジ付きキャップとして作られていることを特徴とする装置。
形態7
形態1~6のいずれか1に記載の装置であって、
a)ツールキャリア(3)を無菌状態で作業室(11)に運び入れるために、気密に覆われた移送容器(2)が設けられており、また、ハウジング(10)には移送ポート(12)が設けられおり、
b)移送容器(2)は、ツールキャリア(3)を受け入れて移送ポート(12)にドッキングするためのものであり、
c)移送容器(2)が移送ポート(12)にドッキングした状態において、移送ポート(12)及び移送容器(2)が開いている場合、ツールキャリア(3)は、ロボット(17)に把持されて移送容器(2)から作業室(11)内へと引き入れられることを特徴とする装置。
形態8
形態1~7のいずれか1に記載された装置であって、
a)空にすべき容器(6)又は充填すべき容器(6)を除染された状態で作業室(11)に運び入れるために、気密に覆われたロック(23)が設けられており、また、ハウジング(10)にはロックポート(13)が設けられており、
b)ロック(23)は、容器(6)を受け入れてロックポート(13)にドッキングするためのものであり、及び
c)ロックポート(13)にロック(23)がドッキングされた状態において、ロックポート(13)及びロック(23)が開いている場合、容器(3)は、ロボット(17)により把持されてロック(23)から作業室(11)内へと引き入れられること、又は、搬送装置によって作業室(11)内へと運ばれることを特徴とする装置。
形態9
形態2~8のいずれか1に記載の装置であって、
接続フランジ(300)内に配置された秤量セル(302)が、比較により重量を求めること、すなわち、
(a)粉体(9)が充填された容器(6)の中身を回収容器(7)に空ける工程において、出発状態における粉体(9)が充填された容器(6)と空になった容器(6)との間の比較、又は、
(b)空の容器(6)に貯蔵容器(8)から粉体(9)を充填する工程において、出発状態における空の容器(6)と粉体(9)が充填された容器(6)との間の比較により重量を求めることを特徴とする装置。
形態10
形態5~9のいずれか1に記載された装置であって、
a)検査目的で粉体(9)から試料を採取するためのサンプリングツール(39)が、粉体(9)が充填された容器(6)の中身を回収容器(7)に空ける工程において、又は、空の容器(6)に貯蔵容器(8)から粉体(9)を充填する工程において使用されること、又は、
b)代替的に、装置が、取り扱われる粉体(9)の特性をサンプリングツール(39)を用いて検査することのみを目的としたものであることを特徴とする装置。
形態11
形態8及び10に記載の装置であって、
a)ロック(23)は、空になった又は充填された容器(6)を作業室(11)から運び出すためにも、また、取り扱う粉体(9)の特性を検査するためにサンプリングツール(39)を用いて試験量を採取する目的で、粉体(9)が充填された容器(6)を作業室(11)に運び入れるため、もしくは、作業室(11)から運び出すためにも使用できること、又は、
b)空になった又は充填された容器(6)を作業室(11)から運び出すため、また、取り扱う粉体(9)の特性を検査するためにサンプリングツール(39)を用いて試験量を採取する目的で、粉体(9)が充填された容器(6)を作業室(11)に運び入れるため、もしくは、作業室(11)から運び出すために、封じ込め装置(1)には、第2ロック又はマウスホールが設けられていることを特徴とする装置。
形態12
形態1~11のいずれか1に記載の装置であって、
空の容器(6)に貯蔵容器(8)から粉体(9)を充填する工程において、貯蔵容器(8)と移送ヘッド(4)との間には粉体(9)の所望の充填量を分配するための計量装置(80)が配置されていることを特徴とする装置。
形態13
形態1~12のいずれか1に記載の装置であって、
a)回収容器(7)に付属する移送ヘッド(4)が封じ込め装置(1)のハウジング(10)に、好ましくは床材に固定されており、移送ヘッド(4)から回収容器(7)へと導管部が延びており、及び、
b)貯蔵容器(8)に付属する移送ヘッド(4)が、封じ込め装置(1)のハウジング(10)に、好ましくは天井材に固定されていることを特徴とする装置。
10 ハウジング
11 作業室
12 移送ポート
13 ロックポート
14 パークステーション
15 供給管
17 ロボット
18 土台
19 アーム機構
2 移送容器
23 ロック
3 ツールキャリア
30 ベース
300 接続フランジ
301 位置決め部材
302 秤量セル
31 受動部
32 クランプ要素
33 バキュームリフター
34 吸引ツール
34’ 吸引ツール
340 管
35 洗浄・殺菌ツール
350 管
36 つば出しツール
37 バイブレータ
38 リッパーフック
39 サンプリングツール
4 移送ヘッド
40 ベース
401 ロッキング部材
41 能動部
42 駆動装置
51 疑似部品
6 容器
61 第1閉鎖要素
62 第2閉鎖要素
7 回収容器
70 土台
71 排出弁
72 導管部
8 貯蔵容器
80 計量装置
9 粉体
90 試料容器
Claims (13)
- 粉体(9)を無菌的に移し替えるため、すなわち、粉体(9)が充填された容器(6)の中身を回収容器(7)に空けるため、及び/又は、貯蔵容器(8)から粉体(9)を容器(6)に充填するために封じ込め装置(1)を備える装置であって、
a)封じ込め装置(1)は、ハウジング(10)に囲まれた作業室(11)を有しており、
b)封じ込め装置(1)内にはロボット(17)が設置されており、ロボット(17)は、旋回範囲にわたって動かせるアーム機構(19)を有しており、
c)回収容器(7)は作業室(11)から供給を受ける入口を有しており、また、貯蔵容器(8)は作業室(11)へと供給を行う出口を有しており、
d)容器(6)は、少なくとも第1閉鎖要素(61)を用いて閉鎖可能である、装置において、
e)アーム機構(19)はツールキャリア(3)に接続されており、ツールキャリア(3)のベース(30)には少なくとも、容器(6)を把持するためのクランプ要素(32)、第1閉鎖要素(61)を把持するためのバキュームリフター(33)、及び、ダブルフラップの受動部(31)が備えられており、
f)回収容器(7)への入口及び/又は貯蔵容器(8)の出口には移送ヘッド(4)が取り付けられていてそれぞれが作業室(11)内に突出しており、
g)受動部(31)は、移送ヘッド(4)内に含まれている能動部(41)と共にダブルフラップを形成することを特徴とする、封じ込め装置を備える装置。 - 請求項1に記載の装置であって、
a)ツールキャリア(3)のベース(30)が、アーム機構(19)に接続するための接続フランジ(300)を有しており、接続フランジ(300)には秤量セル(302)を設置することができ、及び、
b)ベース(30)には位置決め部材(301)が設けられており、位置決め部材(301)は、移送ヘッド(4)のベース(40)に配置された相補的なロッキング部材(401)に形状結合的及び摩擦結合的に接続するためのものであり、また、ツールキャリア(3)と移送ヘッド(4)との間の耐圧的な組み付けを確保するものであることを特徴とする装置。 - 請求項1又は2に記載の装置であって、
a)ツールキャリア(3)のベース(30)は、吸引ツール(34)又は洗浄・殺菌ツール(35)又はつば出しツール(36)を一時的に収容できるようになっており、
b)ツール(34、35、36)をツールキャリア(3)のベース(30)に固定する役割はクランプ要素(32)が単独で又は追加的に担っており、
c)吸引ツール(34)は、作業室(11)内においてツールキャリア(3)及び第1閉鎖要素(61)を洗浄し、
d)洗浄・殺菌ツール(35)は、作業室(11)内においてダブルフラップの受動部(31)及び能動部(41)も含めて回収容器(7)の洗浄及び殺菌を行い、及び、
e)つば出しツール(36)は、作業室(11)内において第2閉鎖要素(62)を容器(6)に取り付けることを特徴とする装置。 - 請求項3に記載の装置であって、
ツール(34、35、36)は、作業室(11)内においてパークステーション(14)に着脱可能に置かれており、ロボット(17)のアーム機構(19)に設けられたツールキャリア(3)により把持されて使用されることを特徴とする装置。 - 請求項1~4のいずれか1項に記載の装置であって、完全に装備された状態のツールキャリア(3)は、以下のもの;
a)空にすべき容器(6)から粉体(9)の残りを落とすためのバイブレータ(37);
b)空にすべき容器(6)に第2閉鎖要素(62)が存在する場合には、これを取り除くためのリッパーフック(38)、及び
c)検査目的で粉体(9)の試料を採取するためのサンプリングツール(39)も有することを特徴とする装置。 - 請求項3に記載の装置であって、
a)第1閉鎖要素(61)は、容器(6)の口に載せられる蓋又は容器(6)の口に挿入される栓として構成されており、また、
b)第2閉鎖要素(62)は、第1閉鎖要素(61)の上において容器(6)に取り付けられるフランジ付きキャップとして作られていることを特徴とする装置。 - 請求項1~6のいずれか1項に記載の装置であって、
a)ツールキャリア(3)を無菌状態で作業室(11)に運び入れるために、気密に覆われた移送容器(2)が設けられており、また、ハウジング(10)には移送ポート(12)が設けられおり、
b)移送容器(2)は、ツールキャリア(3)を受け入れて移送ポート(12)にドッキングするためのものであり、
c)移送容器(2)が移送ポート(12)にドッキングした状態において、移送ポート(12)及び移送容器(2)が開いている場合、ツールキャリア(3)は、ロボット(17)に把持されて移送容器(2)から作業室(11)内へと引き入れられることを特徴とする装置。 - 請求項1~7のいずれか1項に記載された装置であって、
a)空にすべき容器(6)又は充填すべき容器(6)を除染された状態で作業室(11)に運び入れるために、気密に覆われたロック(23)が設けられており、また、ハウジング(10)にはロックポート(13)が設けられており、
b)ロック(23)は、容器(6)を受け入れてロックポート(13)にドッキングするためのものであり、及び
c)ロックポート(13)にロック(23)がドッキングされた状態において、ロックポート(13)及びロック(23)が開いている場合、容器(6)は、ロボット(17)により把持されてロック(23)から作業室(11)内へと引き入れられること、又は、搬送装置によって作業室(11)内へと運ばれることを特徴とする装置。 - 請求項2~8のいずれか1項に記載の装置であって、
接続フランジ(300)内に配置された秤量セル(302)が、比較により重量を求めること、すなわち、
(a)粉体(9)が充填された容器(6)の中身を回収容器(7)に空ける工程において、出発状態における粉体(9)が充填された容器(6)と空になった容器(6)との間の比較、又は、
(b)空の容器(6)に貯蔵容器(8)から粉体(9)を充填する工程において、出発状態における空の容器(6)と粉体(9)が充填された容器(6)との間の比較により重量を求めることを特徴とする装置。 - 請求項5~9のいずれか1項に記載された装置であって、
検査目的で粉体(9)から試料を採取するためのサンプリングツール(39)が、粉体(9)が充填された容器(6)の中身を回収容器(7)に空ける工程において、又は、空の容器(6)に貯蔵容器(8)から粉体(9)を充填する工程において使用されることを特徴とする装置。 - 請求項8又は10に記載の装置であって、
a)ロック(23)は、空になった又は充填された容器(6)を作業室(11)から運び出すためにも、また、取り扱う粉体(9)の特性を検査するためにサンプリングツール(39)を用いて試験量を採取する目的で、粉体(9)が充填された容器(6)を作業室(11)に運び入れるため、もしくは、作業室(11)から運び出すためにも使用できること、又は、
b)空になった又は充填された容器(6)を作業室(11)から運び出すため、また、取り扱う粉体(9)の特性を検査するためにサンプリングツール(39)を用いて試験量を採取する目的で、粉体(9)が充填された容器(6)を作業室(11)に運び入れるため、もしくは、作業室(11)から運び出すために、封じ込め装置(1)には、別のロックが設けられていることを特徴とする装置。 - 請求項1~11のいずれか1項に記載の装置であって、
空の容器(6)に貯蔵容器(8)から粉体(9)を充填する工程において、貯蔵容器(8)と移送ヘッド(4)との間には粉体(9)の所望の充填量を分配するための計量装置(80)が配置されていることを特徴とする装置。 - 請求項1~12のいずれか1項に記載の装置であって、
a)回収容器(7)に付属する移送ヘッド(4)が封じ込め装置(1)のハウジング(10)に、又は床材に固定されており、移送ヘッド(4)から回収容器(7)へと導管部が延びており、及び、
b)貯蔵容器(8)に付属する移送ヘッド(4)が、封じ込め装置(1)のハウジング(10)に、又は天井材に固定されていることを特徴とする装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19405014.2A EP3789305B1 (de) | 2019-09-05 | 2019-09-05 | Anlage mit einem containment zum aseptischen umfüllen eines pulvers |
| EP19405014.2 | 2019-09-05 | ||
| PCT/CH2020/000010 WO2021042217A1 (de) | 2019-09-05 | 2020-08-12 | Anlage mit einem containment zum aseptischen umfüllen eines pulvers |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022547842A JP2022547842A (ja) | 2022-11-16 |
| JPWO2021042217A5 JPWO2021042217A5 (ja) | 2023-08-01 |
| JP7549003B2 true JP7549003B2 (ja) | 2024-09-10 |
Family
ID=67998428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022513989A Active JP7549003B2 (ja) | 2019-09-05 | 2020-08-12 | 粉体を無菌的に移し替えるための封じ込め装置を備える装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US20220388702A1 (ja) |
| EP (1) | EP3789305B1 (ja) |
| JP (1) | JP7549003B2 (ja) |
| KR (1) | KR20220053584A (ja) |
| CN (1) | CN114341003B (ja) |
| BR (1) | BR112022002428A2 (ja) |
| CA (1) | CA3148176A1 (ja) |
| DK (1) | DK3789305T3 (ja) |
| WO (1) | WO2021042217A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022100678A1 (de) * | 2022-01-12 | 2023-07-13 | Tt Innovation Ag | Transfervorrichtung, Verfahren und Verwendung einer Transfervorrichtung zum Überführen wenigstens eines Funktionselements in eine Prozesskammer |
| DE102022103828B3 (de) * | 2022-02-17 | 2023-07-27 | Gerhard Schubert Gesellschaft mit beschränkter Haftung | Verpackungs-Maschine |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015167644A (ja) | 2014-03-05 | 2015-09-28 | 株式会社安川電機 | 液体移送システム、液体移送制御方法、液体移送制御装置、及び薬剤製造方法 |
| JP2018140798A (ja) | 2017-02-28 | 2018-09-13 | 有限会社ユウアイ | 包装装置および包装システム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10218128A (ja) * | 1997-02-03 | 1998-08-18 | Toppan Printing Co Ltd | 無菌充填装置 |
| EP0997154A1 (en) * | 1998-11-01 | 2000-05-03 | Newform N.V. | Sterilisable container with a sterilisable adapter for docking to a port of an isolation system. |
| US20040185521A1 (en) * | 2003-03-20 | 2004-09-23 | Shigeru Yoshida | Microorganism sampling method and microorganism sampling device |
| EP2457550B8 (en) * | 2005-05-16 | 2016-07-13 | ARxIUM Inc. | Automated pharmacy admixture system (APAS) |
| ITBO20060246A1 (it) * | 2006-04-05 | 2007-10-06 | Ima Spa | Apparato e metodo per alimentare con un prodotto una macchina confezionatrice. |
| JPWO2011108446A1 (ja) * | 2010-03-03 | 2013-06-27 | 株式会社湯山製作所 | 薬剤充填装置 |
| PT2535034E (pt) * | 2011-06-17 | 2014-07-28 | Kiro Robotics Sl | Máquina e método para a preparação automática de medicação intravenosa |
| US20160050946A1 (en) * | 2013-03-15 | 2016-02-25 | Treasure Brands | Food product processing and packaging system and method |
| TW201900137A (zh) * | 2013-08-16 | 2019-01-01 | 加拿大商凡爾克斯醫藥系統公司 | 用於藥物容器裝填及凍乾的方法、裝置及系統 |
| EP3068870B1 (en) * | 2013-11-13 | 2020-01-15 | Stempeutics Research Private Limited | A system and method for processing of biological tissue samples |
| ITUB20150371A1 (it) * | 2015-05-05 | 2016-11-05 | Masmec S P A | Sistema per la preparazione ed il dosaggio di farmaci chemioterapici |
| JP6850258B2 (ja) * | 2015-10-20 | 2021-03-31 | ロート製薬株式会社 | 細胞処理装置 |
| ITUA20161408A1 (it) * | 2016-03-07 | 2017-09-07 | Swisslog Italia Spa | Macchina e procedimento per la preparazione di medicamenti intravenosi |
| IT201600084890A1 (it) * | 2016-08-11 | 2018-02-11 | Aea Srl | Impianto e procedimento per la preparazione di medicinali |
| DK3335844T3 (da) * | 2016-12-15 | 2020-01-06 | Pharma Integration S R L | Konstruktiv struktur af en indeslutning bestemt til automatiseret produktion af farmaceutiske eller biotekniske artikler |
| WO2019071339A1 (en) * | 2017-10-10 | 2019-04-18 | Vanrx Pharmasystems Inc. | APPARATUS AND METHOD FOR MONITORING AND CONTROLLING CONTAINER FILLING CONTAINING PHARMACEUTICAL FLUID IN AN ASEPTIC ENVIRONMENT |
| CN109859406B (zh) * | 2019-03-29 | 2024-09-06 | 江苏迅捷智能科技有限公司 | 一种发药系统以及自动售药机 |
-
2019
- 2019-09-05 DK DK19405014.2T patent/DK3789305T3/da active
- 2019-09-05 EP EP19405014.2A patent/EP3789305B1/de active Active
-
2020
- 2020-08-12 BR BR112022002428A patent/BR112022002428A2/pt unknown
- 2020-08-12 JP JP2022513989A patent/JP7549003B2/ja active Active
- 2020-08-12 KR KR1020227007314A patent/KR20220053584A/ko unknown
- 2020-08-12 WO PCT/CH2020/000010 patent/WO2021042217A1/de active Application Filing
- 2020-08-12 CN CN202080062078.XA patent/CN114341003B/zh active Active
- 2020-08-12 US US17/640,304 patent/US20220388702A1/en active Pending
- 2020-08-12 CA CA3148176A patent/CA3148176A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015167644A (ja) | 2014-03-05 | 2015-09-28 | 株式会社安川電機 | 液体移送システム、液体移送制御方法、液体移送制御装置、及び薬剤製造方法 |
| JP2018140798A (ja) | 2017-02-28 | 2018-09-13 | 有限会社ユウアイ | 包装装置および包装システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3789305B1 (de) | 2022-01-19 |
| WO2021042217A1 (de) | 2021-03-11 |
| KR20220053584A (ko) | 2022-04-29 |
| DK3789305T3 (da) | 2022-03-28 |
| CN114341003B (zh) | 2023-08-22 |
| CN114341003A (zh) | 2022-04-12 |
| CA3148176A1 (en) | 2021-03-11 |
| US20220388702A1 (en) | 2022-12-08 |
| BR112022002428A2 (pt) | 2022-07-19 |
| EP3789305A1 (de) | 2021-03-10 |
| JP2022547842A (ja) | 2022-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7549003B2 (ja) | 粉体を無菌的に移し替えるための封じ込め装置を備える装置 | |
| JP5038414B2 (ja) | 医薬品の調製装置 | |
| JP6448298B2 (ja) | 製品の充填及び仕上げのための使い捨て製造ライン | |
| EP2624802B1 (en) | Machine for the automatic preparation of intravenous medication | |
| JP7337958B2 (ja) | 敏感な製品を取り扱う設備、特に包装設備 | |
| JP5107340B2 (ja) | 包装機械に製品を給送する装置及び方法 | |
| CN106800268A (zh) | 一种放射性同位素药剂自动灌装系统 | |
| JP2820761B2 (ja) | 小型物品の洗浄殺菌装置 | |
| JP4329066B2 (ja) | 無菌試験サンプリング方法及びその装置 | |
| KR20180121978A (ko) | 정맥주사용 약제들을 조제하기 위한 기계 및 프로세스 | |
| JP5197168B2 (ja) | 内袋を備えた容器からの粉体供給方法、および粉体供給装置 | |
| US5715646A (en) | Aseptic chemical transfer system | |
| US7810528B2 (en) | Transport container for sterile products | |
| US10669071B2 (en) | Powder container systems for additive manufacturing | |
| KR101560650B1 (ko) | 용기뚜껑에 이종물질을 충진하는 장치 및 방법 | |
| US12077330B2 (en) | Filling device for filling containers in a single-use isolator | |
| FR2630216A1 (fr) | Installation robotisee d'analyses, notamment medicales | |
| JPWO2021042217A5 (ja) | ||
| GB2291863A (en) | Isolator System | |
| CN220721571U (zh) | 一种腻子粉自动包装机 | |
| WO2024161433A1 (en) | Apparatus and method for automatically filling and weighing containers | |
| JP5459013B2 (ja) | チャンバー | |
| JP2001199410A (ja) | リテーナー容器移し替え装置及び方法 | |
| JP2023539637A (ja) | シリンジキャップ用カートリッジ装填システム | |
| JP4064211B2 (ja) | 物品の受渡装置及び受渡方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230721 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240306 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240814 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7549003 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |