JP7409552B2 - 搬送機器 - Google Patents
搬送機器 Download PDFInfo
- Publication number
- JP7409552B2 JP7409552B2 JP2023504896A JP2023504896A JP7409552B2 JP 7409552 B2 JP7409552 B2 JP 7409552B2 JP 2023504896 A JP2023504896 A JP 2023504896A JP 2023504896 A JP2023504896 A JP 2023504896A JP 7409552 B2 JP7409552 B2 JP 7409552B2
- Authority
- JP
- Japan
- Prior art keywords
- rail
- car
- link
- wheels
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/003—Kinds or types of lifts in, or associated with, buildings or other structures for lateral transfer of car or frame, e.g. between vertical hoistways or to/from a parking position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/0035—Arrangement of driving gear, e.g. location or support
- B66B11/0045—Arrangement of driving gear, e.g. location or support in the hoistway
- B66B11/005—Arrangement of driving gear, e.g. location or support in the hoistway on the car
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
- B66B11/043—Driving gear ; Details thereof, e.g. seals actuated by rotating motor; Details, e.g. ventilation
- B66B11/0476—Driving gear ; Details thereof, e.g. seals actuated by rotating motor; Details, e.g. ventilation with friction gear, e.g. belt linking motor to sheave
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/02—Kinds or types of lifts in, or associated with, buildings or other structures actuated mechanically otherwise than by rope or cable
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Civil Engineering (AREA)
- Types And Forms Of Lifts (AREA)
Description
また、本開示に係る搬送機器は、一対の分割体で構成され、かご室の背面に対してそれぞれ回転自在に連結された回転体と、前記かご室の背面側においてレールのガイド面を挟み込むように前記回転体に設けられ、前記レールが長手方向を鉛直方向としている際に前記レールとの摩擦により前記かご室を鉛直方向に移動させる力を発生させ、前記レールが長手方向を水平方向としている際に前記レールとの摩擦力により前記かご室を水平方向に移動させる力を発生させる車輪と、前記レールのガイド面に接触した第1左右傾き防止ローラーと、前記レールの底板において前記かご室から遠い側に接触した状態で前記一対の分割体の一方に支持された第1前後傾き防止ローラーと、前記レールのガイド板の先端に接触した状態で前記一対の分割体の他方に支持された第2前後傾き防止ローラーと、前記回転体の前記一対の分割体の他方に回転自在に支持され、前記第1左右傾き防止ローラーを回転自在に支持したリンクと、前記リンクと前記回転体の前記一対の分割体の他方とに連結された弾性体と、を備えた。
また、本開示に係る搬送機器は、かご室の背面に対して回転自在に連結された回転体と、前記かご室の背面側においてレールのガイド面の一方の側に設けられた第1車輪と前記レールのガイド面の他方の側に設けられた第2車輪とで前記レールのガイド面を挟み込むように前記回転体に設けられ、前記レールが長手方向を鉛直方向としている際に前記レールとの摩擦により前記かご室を鉛直方向に移動させる力を発生させ、前記レールが長手方向を水平方向としている際に前記レールのガイド面の一方の側に接触して前記レールとの摩擦力により前記かご室を水平方向に移動させる力を発生させる車輪と、前記回転体から前記かご室に対して離れる方向に伸びた支持体と、前記レールに対して前記かご室から遠い側のガイド面の側において前記支持体に設けられ、前記第1車輪を回転自在に支持した第1車輪支持リンクと、前記レールが長手方向を鉛直方向としている際に第1車輪支持リンクよりも低い位置に配置されるように、前記レールに対して前記かご室から近い側のガイド面の側において前記支持体に設けられ、前記第2車輪を回転自在に支持した第2車輪支持リンクと、を備え、前記かご室が水平方向に移動する場合は、前記第1車輪支持リンクの側の車輪が駆動される。
図1は実施の形態1における自走エレベーターの駆動装置が適用されるエレベーターシステムの構成図である。
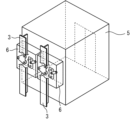
図2は実施の形態1における自走エレベーターの駆動装置が適用されるエレベーターシステムのレールとかごとを説明するための斜視図である。
図3は実施の形態1における自走エレベーターの駆動装置の背面図である。図4は実施の形態1における自走エレベーターの駆動装置の側面図である。図5は実施の形態1における自走エレベーターの駆動装置の背面図である。図6は実施の形態1における自走エレベーターの駆動装置の側面図である。
図7は実施の形態1における自走エレベーターの駆動装置の第1変形例の背面図である。図8は実施の形態1における自走エレベーターの駆動装置の第1変形例の側面図である。
図9は実施の形態1における自走エレベーターの駆動装置の第2変形例の背面図である。
図10は実施の形態1における自走エレベーターの駆動装置の第3変形例の斜視図である。
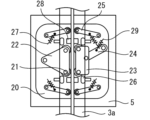
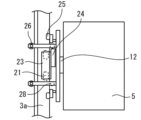
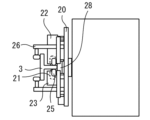
図11は実施の形態2における自走エレベーターの駆動装置が適用されるエレベーターシステムの下部を示す図である。図12は実施の形態2における自走エレベーターの駆動装置の背面図である。図13は実施の形態2における自走エレベーターの駆動装置の側面図である。図14は実施の形態2における自走エレベーターの駆動装置の背面図である。図15は実施の形態2における自走エレベーターの駆動装置の側面図である。なお、実施の形態1の部分と同一又は相当部分には同一符号が付される。当該部分の説明は省略される。
図16は実施の形態3における自走エレベーターの駆動装置の斜視図である。なお、実施の形態1の部分と同一又は相当部分には同一符号が付される。当該部分の説明は省略される。
図17は実施の形態3における自走エレベーターの駆動装置の背面図である。図18は実施の形態3における自走エレベーターの駆動装置の側面図である。図19は実施の形態3における自走エレベーターの駆動装置の背面図である。図20は実施の形態3における自走エレベーターの駆動装置の側面図である。
図21は実施の形態3における自走エレベーターの駆動装置の第1変形例の側面図である。
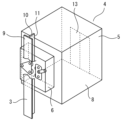
図22は実施の形態4における自走エレベーターの駆動装置が適用されるエレベーターシステムの斜視図である。なお、実施の形態1の部分と同一又は相当部分には同一符号が付される。当該部分の説明は省略される。
図23は実施の形態4における自走エレベーターのかごの斜視図である。
図24は実施の形態4における自走エレベーターの駆動装置が適用されるエレベーターシステムの要部の斜視図である。
Claims (10)
- かご室の背面に対して回転自在に連結された回転体と、
前記かご室の背面側においてレールのガイド面を挟み込むように前記回転体に設けられ、前記レールが長手方向を鉛直方向としている際に前記レールとの摩擦により前記かご室を鉛直方向に移動させる力を発生させ、前記レールが長手方向を水平方向としている際に前記レールとの摩擦力により前記かご室を水平方向に移動させる力を発生させる車輪と、
前記レールのガイド面に接触した第1左右傾き防止ローラーと、
前記回転体に回転自在に支持され、前記第1左右傾き防止ローラーを回転自在に支持したリンクと、
前記リンクと前記回転体とに連結された弾性体と、
前記レールの底板において前記かご室から遠い側に接触した状態で前記回転体に支持された第1前後傾き防止ローラーと、
前記レールのガイド板の先端に接触した状態で前記回転体に支持された第2前後傾き防止ローラーと、
を備えた搬送機器。 - 一対の分割体で構成され、かご室の背面に対してそれぞれ回転自在に連結された回転体と、
前記かご室の背面側においてレールのガイド面を挟み込むように前記回転体に設けられ、前記レールが長手方向を鉛直方向としている際に前記レールとの摩擦により前記かご室を鉛直方向に移動させる力を発生させ、前記レールが長手方向を水平方向としている際に前記レールとの摩擦力により前記かご室を水平方向に移動させる力を発生させる車輪と、
前記レールのガイド面に接触した第1左右傾き防止ローラーと、
前記レールの底板において前記かご室から遠い側に接触した状態で前記一対の分割体の一方に支持された第1前後傾き防止ローラーと、
前記レールのガイド板の先端に接触した状態で前記一対の分割体の他方に支持された第2前後傾き防止ローラーと、
前記回転体の前記一対の分割体の他方に回転自在に支持され、前記第1左右傾き防止ローラーを回転自在に支持したリンクと、
前記リンクと前記回転体の前記一対の分割体の他方とに連結された弾性体と、
を備えた搬送機器。 - 前記車輪は、複数であり、
複数の車輪のうちの一部は、前記レールのガイド面の他方の側に設けられ、
前記複数の車輪のうちの他部は、前記レールのガイド面の一方の側に設けられ、前記レールが長手方向を水平方向としている際に前記ガイド面の一方に接触して前記レールとの摩擦力により前記かご室を水平方向に移動させる力を発生させる請求項1または請求項2に記載の搬送機器。 - 前記レールのガイド面の一方の側において前記回転体に支持され、前記複数の車輪のうちの他部を回転自在に支持した車輪支持リンクと、
前記かご室が鉛直方向に移動する際に水平方向に対して45度以下の角度で斜めに配置されるように前記レールのガイド面の他方の側において前記回転体に支持され、前記複数の車輪のうちの一部を回転自在に支持した自己倍力用リンクと、
を備えた請求項3に記載の搬送機器。 - 前記車輪支持リンクは、前記回転体に対して回転自在に支持されたリンクまた前記回転体に対して固定されたリンクである請求項4に記載の搬送機器。
- 前記複数の車輪のうちの一部を回転自在に支持し、前記自己倍力用リンクに回転自在に支持されたリンク、
を備えた請求項4に記載の搬送機器。 - 前記自己倍力用リンクは、前記複数の車輪のうちの一部を直接的に回転自在に支持した請求項4に記載の搬送機器。
- かご室の背面に対して回転自在に連結された回転体と、
前記かご室の背面側においてレールのガイド面の一方の側に設けられた第1車輪と前記レールのガイド面の他方の側に設けられた第2車輪とで前記レールのガイド面を挟み込むように前記回転体に設けられ、前記レールが長手方向を鉛直方向としている際に前記レールとの摩擦により前記かご室を鉛直方向に移動させる力を発生させ、前記レールが長手方向を水平方向としている際に前記ガイド面の一方に接触して前記レールとの摩擦力により前記かご室を水平方向に移動させる力を発生させる車輪と、
前記回転体から前記かご室に対して離れる方向に伸びた支持体と、
前記レールに対して前記かご室から遠い側のガイド面の側において前記支持体に設けられ、前記第1車輪を回転自在に支持した第1車輪支持リンクと、
前記レールが長手方向を鉛直方向としている際に第1車輪支持リンクよりも低い位置に配置されるように、前記レールに対して前記かご室から近い側のガイド面の側において前記支持体に設けられ、前記第2車輪を回転自在に支持した第2車輪支持リンクと、
を備え、
前記かご室が水平方向に移動する場合は、前記第1車輪支持リンクの側の車輪が駆動される、搬送機器。 - 前記第2車輪支持リンクは、前記支持体に対して回転自在に支持されたリンクまた前記支持体に対して固定されたリンクである請求項8に記載の搬送機器。
- 前記支持体に設けられ、前記レールにおけるかご室の側の底板の一面に接触する第1組の複数の第2左右傾き防止ローラーと、
前記支持体に設けられ、前記レールにおけるかご室の側の底板の他面に接触する第2組の複数の第2左右傾き防止ローラーと、
前記かご室から遠い側において最上部にある車輪と同じ高さの位置またはかご室から遠い側において最上部にある車輪よりも高い位置において前記支持体に設けられ、前記レールにおける前記かご室から近い側のガイド面に接触する第3前後傾き防止ローラーと、
を備えた請求項8または請求項9に記載の搬送機器。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/009051 WO2022190179A1 (ja) | 2021-03-08 | 2021-03-08 | 自走エレベーターの駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022190179A1 JPWO2022190179A1 (ja) | 2022-09-15 |
| JPWO2022190179A5 JPWO2022190179A5 (ja) | 2023-06-19 |
| JP7409552B2 true JP7409552B2 (ja) | 2024-01-09 |
Family
ID=83227538
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023504896A Active JP7409552B2 (ja) | 2021-03-08 | 2021-03-08 | 搬送機器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12503340B2 (ja) |
| JP (1) | JP7409552B2 (ja) |
| CN (1) | CN116963986A (ja) |
| DE (1) | DE112021007262T5 (ja) |
| WO (1) | WO2022190179A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113879941B (zh) * | 2021-09-24 | 2023-05-05 | 中际联合(北京)科技股份有限公司 | 模块化升降设备及升降系统 |
| CN119968333A (zh) * | 2022-10-12 | 2025-05-09 | 三菱电机株式会社 | 自行式电梯以及自行式电梯的路径切换方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4015537A (en) | 1975-06-09 | 1977-04-05 | Diebold, Incorporated | Interior railway transportation system |
| JP2001080848A (ja) | 1999-09-10 | 2001-03-27 | Fujitec Co Ltd | 自走式エレベータ |
| US20050236945A1 (en) | 2004-04-21 | 2005-10-27 | Vasco De Sousa Marreiros Alves | People and cargo transportation machine |
| US20070272494A1 (en) | 2006-05-24 | 2007-11-29 | Hans Kocher | Elevator with frictional drive |
| WO2018142556A1 (ja) | 2017-02-03 | 2018-08-09 | 株式会社日立製作所 | マルチカーエレベーター |
| US20200131001A1 (en) | 2017-06-21 | 2020-04-30 | Thyssenkrupp Elevator Ag | Supporting device for a rotary platform in an elevator system |
| WO2021038731A1 (ja) | 2019-08-27 | 2021-03-04 | 三菱電機株式会社 | 搬送装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3261303A (en) * | 1964-07-10 | 1966-07-19 | Anglo Transvaal Cons Invest Co | Overhead haulage systems |
| DE1580860C3 (de) * | 1966-11-08 | 1980-04-17 | Pank Ag, Zuerich (Schweiz) | Hängebahnfahrwerk |
| US3568605A (en) * | 1968-01-24 | 1971-03-09 | Projects General Of America | Suspended monorail system |
| DE1928058B2 (de) * | 1969-06-02 | 1974-11-14 | Von Roll Ag, Gerlafingen (Schweiz) | Transporteinheit für Einschienen-Hängebahnen |
| US3658155A (en) * | 1970-09-15 | 1972-04-25 | William G Salter | Elevator system |
| US3774548A (en) * | 1971-01-13 | 1973-11-27 | A Borst | Gripping locomotive for suspended railway |
| DE68920795T2 (de) * | 1988-08-10 | 1995-05-18 | Yamaha Motor Co Ltd | Transportvorrichtung. |
| DE4122855A1 (de) * | 1991-02-14 | 1992-08-20 | Hillenkoetter & Ronsieck | Aufzug, insbesondere schraegaufzug |
| JPH0648672A (ja) | 1991-10-28 | 1994-02-22 | Toshiba Corp | エレベータ |
| JP2987020B2 (ja) * | 1992-12-25 | 1999-12-06 | 株式会社竹中工務店 | エレベータ装置 |
| EP0745553A1 (de) * | 1995-06-02 | 1996-12-04 | Inventio Ag | Antriebseinheit für einen Aufzug |
| EP0870718B1 (de) * | 1997-04-11 | 2003-06-25 | Inventio Ag | Einrichtung zum Festsetzen einer Aufzugskabine |
| AR018972A1 (es) * | 2000-01-13 | 2001-12-12 | Serrano Jorge | DISPOSICIoN AUToNOMA DE TRANSPORTE Y VEHíCULO AUToNOMO DE TRANSPORTE. |
| JP2009280313A (ja) * | 2008-05-20 | 2009-12-03 | Mitsubishi Electric Corp | 自走式エレベータのカゴ装置 |
| DE102014104458A1 (de) | 2014-03-28 | 2015-10-01 | Thyssenkrupp Elevator Ag | Aufzugsystem |
| SE1551010A1 (en) * | 2015-07-10 | 2017-01-11 | Articulated Funiculator Ab | Elevator carriage support structure |
| KR20180053047A (ko) | 2016-11-11 | 2018-05-21 | 유장욱 | 순환형 엘리베이터 시스템 |
| CA3092640A1 (en) * | 2018-06-14 | 2019-12-19 | Inventio Ag | Method for erecting a lift facility |
| CN112311099B (zh) * | 2019-07-31 | 2023-08-18 | 湖南大举信息科技有限公司 | 用于无随行电缆电梯的供电系统及多轿厢电梯系统 |
| US20220177273A1 (en) * | 2020-12-04 | 2022-06-09 | Otis Elevator Company | Autonomous elevator car mover configured for derailment prevention |
-
2021
- 2021-03-08 US US18/278,183 patent/US12503340B2/en active Active
- 2021-03-08 WO PCT/JP2021/009051 patent/WO2022190179A1/ja not_active Ceased
- 2021-03-08 JP JP2023504896A patent/JP7409552B2/ja active Active
- 2021-03-08 DE DE112021007262.5T patent/DE112021007262T5/de active Pending
- 2021-03-08 CN CN202180095070.8A patent/CN116963986A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4015537A (en) | 1975-06-09 | 1977-04-05 | Diebold, Incorporated | Interior railway transportation system |
| JP2001080848A (ja) | 1999-09-10 | 2001-03-27 | Fujitec Co Ltd | 自走式エレベータ |
| US20050236945A1 (en) | 2004-04-21 | 2005-10-27 | Vasco De Sousa Marreiros Alves | People and cargo transportation machine |
| US20070272494A1 (en) | 2006-05-24 | 2007-11-29 | Hans Kocher | Elevator with frictional drive |
| WO2018142556A1 (ja) | 2017-02-03 | 2018-08-09 | 株式会社日立製作所 | マルチカーエレベーター |
| US20200131001A1 (en) | 2017-06-21 | 2020-04-30 | Thyssenkrupp Elevator Ag | Supporting device for a rotary platform in an elevator system |
| WO2021038731A1 (ja) | 2019-08-27 | 2021-03-04 | 三菱電機株式会社 | 搬送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112021007262T5 (de) | 2023-12-28 |
| US12503340B2 (en) | 2025-12-23 |
| WO2022190179A1 (ja) | 2022-09-15 |
| US20240140760A1 (en) | 2024-05-02 |
| JPWO2022190179A1 (ja) | 2022-09-15 |
| CN116963986A (zh) | 2023-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6443266B2 (en) | Traction type elevator | |
| JP7156545B2 (ja) | 搬送装置 | |
| JP7409552B2 (ja) | 搬送機器 | |
| JP4543868B2 (ja) | マルチカーエレベータ | |
| US20260116662A1 (en) | Automated storage system comprising a shuttle for transporting storage aids | |
| US5816368A (en) | Elevator cars switch hoistways while traveling vertically | |
| CN111204623A (zh) | 一种电梯系统 | |
| JPH11217950A (ja) | 駐車設備のターンテーブル装置 | |
| KR102330511B1 (ko) | 로프리스 엘리베이터 시스템 | |
| KR20180053047A (ko) | 순환형 엘리베이터 시스템 | |
| CN113581976B (zh) | 用于电梯轿厢的导向装置和电梯系统 | |
| JPH04191282A (ja) | エレベータ装置 | |
| JPWO2007020674A1 (ja) | エレベータ装置 | |
| CN120057686B (zh) | 电梯系统 | |
| KR102946385B1 (ko) | 선박용 외팔보 화물승강기 | |
| EP4337584B1 (en) | An elevator system and method | |
| JP7537977B2 (ja) | 自動倉庫システム | |
| JP5676556B2 (ja) | エレベータ装置 | |
| JP2975308B2 (ja) | 移動棚 | |
| WO2018142556A1 (ja) | マルチカーエレベーター | |
| JP2024124711A (ja) | 乗客コンベアおよびその支持装置 | |
| JP6662472B2 (ja) | スタッカクレーン | |
| JP2001140489A (ja) | 走行台車を備えた駐車装置 | |
| KR20240025278A (ko) | 이송 로봇 | |
| JP3051005U (ja) | スライド式荷台を有するリフト |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230330 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230330 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7409552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |