JP7365921B2 - 曲げ機械用の追従装置 - Google Patents
曲げ機械用の追従装置 Download PDFInfo
- Publication number
- JP7365921B2 JP7365921B2 JP2020011965A JP2020011965A JP7365921B2 JP 7365921 B2 JP7365921 B2 JP 7365921B2 JP 2020011965 A JP2020011965 A JP 2020011965A JP 2020011965 A JP2020011965 A JP 2020011965A JP 7365921 B2 JP7365921 B2 JP 7365921B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- shaft
- follow
- frame
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005452 bending Methods 0.000 title claims description 35
- 230000007246 mechanism Effects 0.000 claims description 36
- 239000003638 chemical reducing agent Substances 0.000 claims description 8
- 239000007789 gas Substances 0.000 description 31
- 238000010586 diagram Methods 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 229910001873 dinitrogen Inorganic materials 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
Images















Landscapes
- Bending Of Plates, Rods, And Pipes (AREA)
Description
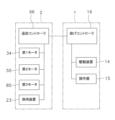
図1は、実施形態に係る曲げ機械1と追従装置2とを示す正面図である。図2は、曲げ機械1と追従装置2とを示す側面図である。図3は、曲げ機械1及び追従装置2の制御システムを示すブロック図である。図2に示すように、曲げ機械1は、板状のワークW1を曲げるための機械である。曲げ機械1は、本体フレーム11と、固定テーブル12と、ラム13と、駆動装置14と、操作盤15と、曲げコントローラ16とを含む。
27 第1ガススプリング
31 第1フレーム
32 回転軸
34 第1モータ
49 第1接続部
50 第2接続部
54 第2減速機
55 第2モータ
56 第2フレーム
63 第1リンク
64 第2リンク
65 第3リンク
73 第1リンク軸
74 第2リンク軸
77 第5リンク軸(中間リンク軸)
81 出力軸
82 ベース部材
85 第3モータ
Claims (9)
- 曲げ機械によって曲げ加工されるワークを支持するための追従装置であって、
前記ワークを支持するための支持台と、
前記支持台に接続された回転軸と、
前記回転軸を回転可能に支持する第1フレームと、
前記回転軸回りに前記支持台を回転させることで前記支持台を傾斜させる第1モータと、
前記第1フレームの下方に配置された第2フレームと、
互いに回転可能に接続された複数のリンクを含み、前記第1フレームと前記第2フレームとに接続されたリンク機構と、
前記複数のリンクの少なくとも1つを回転させることで、前記支持台を上下方向に移動させる第2モータと、
シリンダとピストンロッドとを含み、前記複数のリンクの少なくとも1つと前記第2フレームとに接続されたガススプリングと、
を備える追従装置。 - 前記複数のリンクは、前記第2モータに接続される第1リンクを含み、
前記ガススプリングは、前記第1リンクに接続されている、
請求項1に記載の追従装置。 - 減速機をさらに備え、
前記第2モータは、前記減速機を介して、前記第1リンクに接続されている、
請求項2に記載の追従装置。 - 前記第1リンクは、前記第1フレームに接続されている、
請求項2又は3に記載の追従装置。 - 前記複数のリンクは、前記第1リンクに接続された第2リンクをさらに含み、
前記第2リンクは、前記第2フレームに接続されている、
請求項2から4のいずれかに記載の追従装置。 - 前記第1リンクに接続される第1リンク軸と、
前記追従装置の側面視で、前記第1リンクと交差して配置された第3リンクと、
前記第1リンクと前記第3リンクとを互いに回転可能に接続する中間リンク軸と、
をさらに備え、
前記第2モータは、前記第1リンク軸を介して、前記第1リンクに接続され、
前記ガススプリングは、前記第1リンク軸と前記中間リンク軸との間の位置において前記第1リンクに接続されている、
請求項2から5のいずれかに記載の追従装置。 - 前記第1リンクは、前記ガススプリングが接続される第1接続部を含み、
前記第1接続部は、前記中間リンク軸よりも後方に配置される、
請求項6に記載の追従装置。 - 前記第2フレームは、前記ガススプリングが接続される第2接続部を含み、
前記第2接続部は、前記中間リンク軸よりも前方に配置される、
請求項6又は7に記載の追従装置。 - 前記第2フレームを支持するベース部材と、
前記ベース部材に対して、前記追従装置の前後方向に前記第2フレームを移動させる第3モータと、
をさらに備える請求項1から8のいずれかに記載の追従装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020011965A JP7365921B2 (ja) | 2020-01-28 | 2020-01-28 | 曲げ機械用の追従装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020011965A JP7365921B2 (ja) | 2020-01-28 | 2020-01-28 | 曲げ機械用の追従装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021115616A JP2021115616A (ja) | 2021-08-10 |
| JP7365921B2 true JP7365921B2 (ja) | 2023-10-20 |
Family
ID=77173620
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020011965A Active JP7365921B2 (ja) | 2020-01-28 | 2020-01-28 | 曲げ機械用の追従装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7365921B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118162533B (zh) * | 2024-04-23 | 2024-09-13 | 西安宇钛航空科技发展有限公司 | 一种航空钣金成型的多功能压力机 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002248521A (ja) | 2001-01-08 | 2002-09-03 | Amada Europ | シート金属を曲げるためのプレスと関連づけられたシートメタルフォロア |
| JP6328144B2 (ja) | 2013-01-23 | 2018-05-23 | スマート フラワー エナジー テクノロジー ゲゼルシャフト ミット ベシュレンクテル ハフツングSMART FLOWER ENERGY TECHNOLOGY GmbH | ソーラモジュール |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS51121458A (en) * | 1975-04-18 | 1976-10-23 | Nikko Electric Mfg | Apparatus for feeding work to pressure bending press |
| JPS55100825A (en) * | 1979-01-25 | 1980-08-01 | Shin Meiwa Ind Co Ltd | Blank material holder at press brake |
| JPS57209721A (en) * | 1981-06-19 | 1982-12-23 | Amada Co Ltd | Method and apparatus for plate support and follow-up in press brake |
| JPH06328144A (ja) * | 1993-05-18 | 1994-11-29 | Komatsu Puritetsukusu Kk | 曲げ加工装置用ワーク支持テーブルの回転制御方法および回転制御装置 |
-
2020
- 2020-01-28 JP JP2020011965A patent/JP7365921B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002248521A (ja) | 2001-01-08 | 2002-09-03 | Amada Europ | シート金属を曲げるためのプレスと関連づけられたシートメタルフォロア |
| JP6328144B2 (ja) | 2013-01-23 | 2018-05-23 | スマート フラワー エナジー テクノロジー ゲゼルシャフト ミット ベシュレンクテル ハフツングSMART FLOWER ENERGY TECHNOLOGY GmbH | ソーラモジュール |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021115616A (ja) | 2021-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10052678B2 (en) | Workpiece conveying apparatus for a pressing machine | |
| WO2015145915A1 (ja) | 介助ロボット | |
| US11273482B2 (en) | Transfer device | |
| CN105078503A (zh) | 可倾斜的患者支承装置和用于倾斜患者支承装置的方法 | |
| JP7365921B2 (ja) | 曲げ機械用の追従装置 | |
| JP7332366B2 (ja) | 曲げ機械用の追従装置 | |
| EP0605548A1 (en) | PRESS. | |
| JP7365920B2 (ja) | 曲げ機械用の追従装置 | |
| JP3787351B1 (ja) | 荷搬出入装置 | |
| JP5934063B2 (ja) | 折曲げ加工機 | |
| JP7441054B2 (ja) | 曲げ機械用の追従装置 | |
| JP6240540B2 (ja) | 布線作業用装置 | |
| KR101317141B1 (ko) | 차량용 시트 투입장치 | |
| CN212397886U (zh) | 适用于金属板材折弯的随动托料装置 | |
| CN211841890U (zh) | 升降工作台 | |
| JP2010155662A (ja) | ジャッキ昇降装置 | |
| JPH06198513A (ja) | 丸鋸盤 | |
| CN210792912U (zh) | 四向电动机械腰托 | |
| JP4198035B2 (ja) | プレスラインにおけるワーク搬送装置 | |
| CN108057812A (zh) | 轮辋滚型机及轮辋自动加工系统 | |
| JP7045773B2 (ja) | ベンディングロール機 | |
| JP4224810B2 (ja) | トランスファプレスのワーク搬送装置 | |
| JP2002320651A (ja) | 什器における昇降式脚部 | |
| JP2011031287A (ja) | トランスファ装置 | |
| JP6121932B2 (ja) | ドア保持装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20221205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230913 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230926 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231010 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7365921 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |