JP6899541B2 - 電動工具 - Google Patents
電動工具 Download PDFInfo
- Publication number
- JP6899541B2 JP6899541B2 JP2017107098A JP2017107098A JP6899541B2 JP 6899541 B2 JP6899541 B2 JP 6899541B2 JP 2017107098 A JP2017107098 A JP 2017107098A JP 2017107098 A JP2017107098 A JP 2017107098A JP 6899541 B2 JP6899541 B2 JP 6899541B2
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- motor
- motor shaft
- power tool
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
- H02K7/145—Hand-held machine tool
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Portable Power Tools In General (AREA)
Description
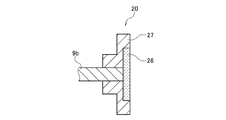
図6(a)は、固定用ブッシュ27の固定面の凹部をD形状に形成した例を示す。磁石26は凹部に嵌合するD形状を有して、凹部に嵌合し、接着剤により固定される。
図6(b)は、固定用ブッシュ27の固定面の凹部を四角形状に形成した例を示す。磁石26は凹部に嵌合する四角形状を有して、凹部に嵌合し、接着剤により固定される。
本発明のある態様の電動工具(1)は、モータ(4)と、モータの回転出力を先端工具に伝達する伝達機構(5)と、モータの回転角度を検出する回転検出部(12)とを備える。回転検出部(12)は、モータのモータシャフト(9b)に取り付けられた回転体(20)と、回転体の回転位置に応じた回転位置信号を出力する位置検出部(30)とを有し、回転体(20)は開口(21)を有し、モータシャフト(9b)が回転体の開口に圧入固定される。
Claims (7)
- モータと、
前記モータの回転出力を先端工具に伝達する伝達機構と、
前記モータの回転角度を検出する回転検出部と、を備えた電動工具であって、
前記回転検出部は、前記モータのモータシャフトに取り付けられた回転体と、前記回転体の回転位置に応じた回転位置信号を出力する位置検出部とを有し、
前記回転体は開口を有し、前記モータシャフトが前記回転体の前記開口に圧入固定され、
前記モータシャフトまたは前記開口の少なくとも一方に、前記モータシャフトの圧入深さを制限する圧入制限部が設けられる、
ことを特徴とする電動工具。 - 前記位置検出部は、支持部材により前記モータのステータに固定され、回転軸方向において前記回転体と対向する、
ことを特徴とする請求項1に記載の電動工具。 - 前記回転体は、前記モータシャフトに相対回転不能に取り付けられる、
ことを特徴とする請求項1または2に記載の電動工具。 - 前記回転検出部は、磁気式エンコーダであって、
前記回転体は、磁石と、磁石を固定する固定用ブッシュを有する、
ことを特徴とする請求項1から3のいずれかに記載の電動工具。 - 前記磁石は、前記固定用ブッシュに接着固定される、
ことを特徴とする請求項4に記載の電動工具。 - 前記固定用ブッシュは、前記磁石の固定面に凹部を有し、
前記磁石は、前記固定用ブッシュの凹部に相対回転不能に嵌合する形状を有する、
ことを特徴とする請求項4または5に記載の電動工具。 - 前記回転体は、前記モータシャフトを支持する軸受に接触しない位置で前記モータシャフトに取り付けられる、
ことを特徴とする請求項1から6のいずれかに記載の電動工具。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017107098A JP6899541B2 (ja) | 2017-05-30 | 2017-05-30 | 電動工具 |
| US16/617,494 US11478916B2 (en) | 2017-05-30 | 2018-03-14 | Electric power tool |
| EP18810556.3A EP3632625B1 (en) | 2017-05-30 | 2018-03-14 | Power tool |
| PCT/JP2018/009893 WO2018220941A1 (ja) | 2017-05-30 | 2018-03-14 | 電動工具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017107098A JP6899541B2 (ja) | 2017-05-30 | 2017-05-30 | 電動工具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018202498A JP2018202498A (ja) | 2018-12-27 |
| JP6899541B2 true JP6899541B2 (ja) | 2021-07-07 |
Family
ID=64455360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017107098A Active JP6899541B2 (ja) | 2017-05-30 | 2017-05-30 | 電動工具 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11478916B2 (ja) |
| EP (1) | EP3632625B1 (ja) |
| JP (1) | JP6899541B2 (ja) |
| WO (1) | WO2018220941A1 (ja) |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3938595A (en) * | 1974-09-19 | 1976-02-17 | Raymond International, Inc. | Apparatus and method for driving bulb piles |
| US4006993A (en) * | 1975-11-25 | 1977-02-08 | Borg-Warner Corporation | Shaft mounting arrangement |
| US4316512A (en) * | 1979-04-04 | 1982-02-23 | Sps Technologies, Inc. | Impact wrench |
| JPH02101946A (ja) * | 1988-10-11 | 1990-04-13 | Matsushita Electric Ind Co Ltd | 速度検出装置付電動機 |
| SE511336C2 (sv) * | 1997-10-27 | 1999-09-13 | Atlas Copco Tools Ab | Metod för fastställande av det installerade momentet i ett skruvförband vid impulsåtdragning, metod för styrning av en åtdragningsprocess, metod för kvalitetsövervakning och ett momentimpulsverktyg för åtdragning av skruvförband |
| JP4407392B2 (ja) * | 2004-06-17 | 2010-02-03 | パナソニック電工株式会社 | インパクト工具 |
| JP4631663B2 (ja) | 2005-11-17 | 2011-02-16 | パナソニック電工株式会社 | 電動工具 |
| JP4961808B2 (ja) * | 2006-04-05 | 2012-06-27 | マックス株式会社 | 鉄筋結束機 |
| EP2141785B1 (en) * | 2008-07-04 | 2019-08-28 | Mabuchi Motor Co., Ltd. | Sensor magnet holder, motor having the holder incorporated therein, and method of manufacturing the motor |
| JP2012071360A (ja) | 2010-09-27 | 2012-04-12 | Panasonic Eco Solutions Power Tools Co Ltd | 回転工具 |
| JP6354978B2 (ja) * | 2014-03-27 | 2018-07-11 | 勝行 戸津 | 定トルク電動ドライバー等におけるトルクリミッタ |
| JP2016022555A (ja) * | 2014-07-19 | 2016-02-08 | 日立工機株式会社 | 電動工具 |
| US10193422B2 (en) | 2015-05-13 | 2019-01-29 | Makita Corporation | Power tool |
| JP2016221632A (ja) * | 2015-05-30 | 2016-12-28 | 日立工機株式会社 | 電動工具 |
| JP2017009312A (ja) * | 2015-06-17 | 2017-01-12 | 株式会社ジェイテクト | 回転角センサ、それを備えたモータ装置および回転角センサの製造方法 |
| US10226849B2 (en) * | 2015-10-14 | 2019-03-12 | Black & Decker Inc. | Handheld grinder with brushless electric motor |
-
2017
- 2017-05-30 JP JP2017107098A patent/JP6899541B2/ja active Active
-
2018
- 2018-03-14 WO PCT/JP2018/009893 patent/WO2018220941A1/ja active Application Filing
- 2018-03-14 US US16/617,494 patent/US11478916B2/en active Active
- 2018-03-14 EP EP18810556.3A patent/EP3632625B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3632625A4 (en) | 2020-06-03 |
| WO2018220941A1 (ja) | 2018-12-06 |
| EP3632625B1 (en) | 2024-06-26 |
| JP2018202498A (ja) | 2018-12-27 |
| US20200180131A1 (en) | 2020-06-11 |
| US11478916B2 (en) | 2022-10-25 |
| EP3632625A1 (en) | 2020-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6906196B2 (ja) | 電動工具 | |
| JP5743085B2 (ja) | 電動工具 | |
| JP5025999B2 (ja) | 電動工具のdcブラシレスモータ | |
| JP5823165B2 (ja) | 回転検出装置及びモータ | |
| JP6952241B2 (ja) | 電動工具 | |
| US20140370791A1 (en) | Hand-Held Power Tool with an Electromotive Drive and at least a First Housing Part | |
| GB2460529A (en) | Stray flux conducting element for rotor position recognition | |
| WO2009034030A3 (en) | Direct drive two rotary axis spindle head | |
| KR101609300B1 (ko) | 토크센서 | |
| JP6899541B2 (ja) | 電動工具 | |
| JP2007271566A (ja) | トルク検出装置 | |
| JP7194903B2 (ja) | 電動工具 | |
| JP6887118B2 (ja) | 電動工具 | |
| JP7210478B2 (ja) | 自動車両ワイピングシステム用ギアモータ | |
| JP6228779B2 (ja) | モータ | |
| WO2017002465A1 (ja) | モータユニット | |
| WO2016067811A1 (ja) | 電動機器 | |
| JP4716901B2 (ja) | ギアードモータ | |
| JP5652131B2 (ja) | 電動工具 | |
| CN110238800B (zh) | 电动工具及其扭力侦测装置 | |
| JP5335341B2 (ja) | モータ | |
| JP2016011900A (ja) | トルクセンサの取付装置 | |
| JP6105294B2 (ja) | モータ | |
| JP2021036757A (ja) | ギヤードモータ | |
| JP2016011899A (ja) | トルクセンサの取付装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180417 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210518 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210528 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6899541 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |