JP6879562B2 - モジュール式ロボットシステム - Google Patents
モジュール式ロボットシステム Download PDFInfo
- Publication number
- JP6879562B2 JP6879562B2 JP2017563575A JP2017563575A JP6879562B2 JP 6879562 B2 JP6879562 B2 JP 6879562B2 JP 2017563575 A JP2017563575 A JP 2017563575A JP 2017563575 A JP2017563575 A JP 2017563575A JP 6879562 B2 JP6879562 B2 JP 6879562B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- soft
- soft actuator
- actuators
- configuration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012530 fluid Substances 0.000 claims description 67
- 230000008859 change Effects 0.000 claims description 25
- 238000000034 method Methods 0.000 claims description 21
- 230000007246 mechanism Effects 0.000 claims description 17
- 239000011159 matrix material Substances 0.000 claims description 13
- 230000013011 mating Effects 0.000 claims description 7
- 229920001971 elastomer Polymers 0.000 claims description 6
- 239000000806 elastomer Substances 0.000 claims description 4
- 238000001125 extrusion Methods 0.000 claims description 4
- 239000000758 substrate Substances 0.000 description 21
- 239000003570 air Substances 0.000 description 14
- 239000012636 effector Substances 0.000 description 11
- 239000000463 material Substances 0.000 description 11
- 230000033001 locomotion Effects 0.000 description 9
- 238000005452 bending Methods 0.000 description 6
- 239000013536 elastomeric material Substances 0.000 description 6
- 230000000737 periodic effect Effects 0.000 description 6
- 230000002787 reinforcement Effects 0.000 description 6
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 5
- 239000011780 sodium chloride Substances 0.000 description 5
- 235000015173 baked goods and baking mixes Nutrition 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 230000002547 anomalous effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 238000003491 array Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- 239000003351 stiffener Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 241000220225 Malus Species 0.000 description 2
- XECAHXYUAAWDEL-UHFFFAOYSA-N acrylonitrile butadiene styrene Chemical compound C=CC=C.C=CC#N.C=CC1=CC=CC=C1 XECAHXYUAAWDEL-UHFFFAOYSA-N 0.000 description 2
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 2
- 229920000122 acrylonitrile butadiene styrene Polymers 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 2
- 239000012080 ambient air Substances 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 238000011194 good manufacturing practice Methods 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 230000005291 magnetic effect Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000007935 neutral effect Effects 0.000 description 2
- -1 polyethylene Polymers 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000012779 reinforcing material Substances 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 244000241257 Cucumis melo Species 0.000 description 1
- 235000015510 Cucumis melo subsp melo Nutrition 0.000 description 1
- 229920000079 Memory foam Polymers 0.000 description 1
- 239000004696 Poly ether ether ketone Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- FJJCIZWZNKZHII-UHFFFAOYSA-N [4,6-bis(cyanoamino)-1,3,5-triazin-2-yl]cyanamide Chemical compound N#CNC1=NC(NC#N)=NC(NC#N)=N1 FJJCIZWZNKZHII-UHFFFAOYSA-N 0.000 description 1
- DHKHKXVYLBGOIT-UHFFFAOYSA-N acetaldehyde Diethyl Acetal Natural products CCOC(C)OCC DHKHKXVYLBGOIT-UHFFFAOYSA-N 0.000 description 1
- 125000002777 acetyl group Chemical class [H]C([H])([H])C(*)=O 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 235000021016 apples Nutrition 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000005538 encapsulation Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 229920001519 homopolymer Polymers 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000008210 memory foam Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920002530 polyetherether ketone Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007779 soft material Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





















































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0023—Gripper surfaces directly activated by a fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/14—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid
- B25J9/142—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid comprising inflatable bodies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0052—Gripping heads and other end effectors multiple gripper units or multiple end effectors
- B25J15/0061—Gripping heads and other end effectors multiple gripper units or multiple end effectors mounted on a modular gripping structure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/10—Gripping heads and other end effectors having finger members with three or more finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/12—Gripping heads and other end effectors having finger members with flexible finger members
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Actuator (AREA)
Description
本願は、米国仮特許出願第62/174,234号(2015年6月11日出願、名称「Modular Robotic Systems」)に対する優先権を主張する。上記出願の内容は、参照により本明細書に組み込まれる。
ロボットシステムは、いくつかの異なる状況において採用され、多種多様な異なるタスクを行うことが要求され得る。ロボットは、典型的には、個々のアクチュエータ、グリッパ、またはエンドエフェクタ等のロボットマニピュレータを使用して、それらの周囲の物体を操作する。
例えば、本発明は、以下の項目を提供する。
(項目1)
モジュール式ロボットシステムであって、前記システムは、
膨張流体を受け取るように構成されているエラストマーブラダを備えているソフトアクチュエータと、
デカルト平面内の前記アクチュエータの絶対位置または前記デカルト平面内の別のアクチュエータに対する前記アクチュエータの位置を動的に調節するように構成されている位置付けシステムと
を備えている、モジュール式ロボットシステム。
(項目2)
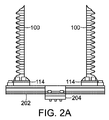
前記ソフトアクチュエータは、T押し出し成形部を有するレール上で展開され、前記位置付けシステムは、前記アクチュエータを前記レール上で移動させ、前記アクチュエータと別のアクチュエータとの間の距離を変化させる、項目1に記載のモジュール式ロボットシステム。
(項目3)
前記アクチュエータは、第1のアレイまたはマトリクスを表す第1の構成において複数のアクチュエータ間で展開され、前記位置付けシステムは、前記複数のアクチュエータを第2のアレイまたはマトリクスを表す第2の構成に再展開するように構成され、前記第2の構成は、前記第1の構成と異なる、項目1に記載のモジュール式ロボットシステム。
(項目4)
前記位置付けシステムは、前記アクチュエータをその基部の周りで回転させるための回転機構をさらに備えている、項目1に記載のモジュール式ロボットシステム。
(項目5)
前記位置付けシステムは、前記アクチュエータの位置を3次元で動的に調節する、項目1に記載のモジュール式ロボットシステム。
(項目6)
方法であって、前記方法は、
ソフトアクチュエータを提供することであって、前記ソフトアクチュエータは、デカルト平面内の第1の位置において膨張流体を受け取るように構成されているエラストマーブラダを備えている、ことと、
前記デカルト平面内の前記アクチュエータの位置を動的に調節し、前記アクチュエータを前記第1の位置と異なる第2の位置に設置することと
を含む、方法。
(項目7)
前記アクチュエータの位置を調節することは、前記アクチュエータをレールに沿って移動させることを含む、項目6に記載の方法。
(項目8)
前記アクチュエータは、第1のアレイまたはマトリクスを表す第1の構成において複数のアクチュエータ間で展開され、前記アクチュエータの位置を調節することは、前記複数のアクチュエータを第2のアレイまたはマトリクスを表す第2の構成に再展開することを含み、前記第2の構成は、前記第1の構成と異なる、項目6に記載の方法。
(項目9)
前記アクチュエータの位置を調節することは、前記アクチュエータをその基部の周りで回転させることをさらに含む、項目6に記載の方法。
(項目10)
前記アクチュエータの位置を調節することは、前記アクチュエータの位置を3次元で調節することを含む、項目6に記載の方法。
(項目11)
モジュール式ロボットシステムであって、前記システムは、
膨張流体を受け取るように構成されているエラストマーブラダを備えているソフトアクチュエータと、
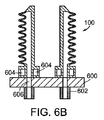
周期的孔アレイを備えている基板であって、前記周期的孔アレイの孔は、前記膨張流体を前記ソフトアクチュエータに供給するためのそれぞれの経路を提供し、前記ソフトアクチュエータは、前記周期的孔アレイの第1の孔の上に解放可能に搭載されている、基板と
を備えている、モジュール式ロボットシステム。
(項目12)
前記アクチュエータは、前記アクチュエータのフランジ内に展開されているオーバーモールドされた磁石を使用して、前記基板上に展開されている、項目11に記載のモジュール式ロボットシステム。
(項目13)
前記オーバーモールドされた磁石は、貫通孔を有する環状磁石であり、空気圧流体が、前記貫通孔を通過し、前記アクチュエータを作動させる、項目12に記載のモジュール式ロボットシステム。
(項目14)
モジュール式ロボットシステムであって、前記システムは、
膨張流体を受け取るように構成されているエラストマーブラダを備えている第1のソフトアクチュエータと、
前記ソフトアクチュエータに搭載されている第1の基板であって、前記第1の基板は、第2のソフトアクチュエータを搭載している第2の基板と相互係止するように構成されている基部と、前記膨張流体を前記第1のソフトアクチュエータに供給するための経路とを備えている、第1の基板と
を備えている、モジュール式ロボットシステム。
(項目15)
第1の基板は、相互接続の方向と垂直な方向における剪断力に抵抗するように構成されている機械的接続を使用して、前記第2の基板と相互接続されている、項目14に記載のモジュール式ロボットシステム。
(項目16)
前記基板は、空気圧流体または電荷を前記アクチュエータに分配するための1つ以上の空気圧相互接続または電気相互接続を備えている、項目14に記載のモジュール式ロボットシステム。
(項目17)
モジュール式ロボットシステムであって、前記システムは、
膨張流体を受け取るように構成されているエラストマーブラダを備えている第1のソフトアクチュエータと、
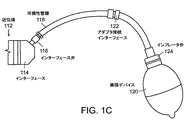
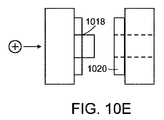
前記アクチュエータを異なるタイプまたはサイズのアクチュエータと交換するための迅速変更アセンブリであって、前記迅速変更アセンブリは、2つ以上の嵌合表面を備え、前記2つ以上の嵌合表面は、前記アクチュエータの形状に対応し、シールを前記アクチュエータの周囲に形成するように嵌合する、迅速変更アセンブリと
を備えている、モジュール式ロボットシステム。
(項目18)
前記アクチュエータへの前記膨張流体の流動を断つための遮断弁をさらに備えている、項目17に記載のモジュール式ロボットシステム。
(項目19)
前記遮断弁は、前記アクチュエータの切迫した故障に対応するパターンが検出されると、前記膨張流体の流動を断つ、項目18に記載のモジュール式ロボットシステム。
(項目20)
モジュール式ロボットシステムであって、前記システムは、
膨張流体を受け取るように構成されているエラストマーブラダを備えている第1のソフトアクチュエータと、
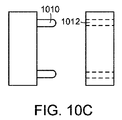
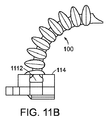
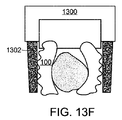
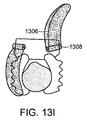
前記ソフトアクチュエータの剛性、前記ソフトアクチュエータの把持表面によって示される摩擦の量、または前記ソフトアクチュエータの曲がりプロファイルのうちの1つ以上のものを修正するための展開可能補剛スリーブと
を備えている、モジュール式ロボットシステム。
(ソフトロボットグリッパに関する背景)
図2A−4Cに描写される例示的実施形態は、アクチュエータをレールを使用して互いに対して再位置付けすることによってアクチュエータが再構成される例を描写する。レール(より具体的には、Tスロットレール)が、これらの図に描写される実施形態では使用されるが、本発明は、そのように限定されず、任意の特定のタイプの誘導機構を使用して、アクチュエータを再位置付けする。Tスロットに加え、アクチュエータと共に展開され、位置決めねじを介してロッド上の定位置に固定される円形金属カラーを使用するシステム等、他のタイプのレールベースのシステムが、採用され得る。さらに、非レールベースのシステムも、採用され得る。非レールベースのシステムの例が、本明細書に説明され、当業者にも明白であろう。
図5A−7Fは、基板に搭載されるアクチュエータの例を描写する。
いくつかの例示的実施形態では、グリッパおよび/またはアクチュエータのモジュール式アレイが、図8A−8Eに示されるように、グリッパ800を他のタイル802と機械的に相互係止可能なタイル802に搭載することによって提供される。
図11A−14Bは、アクチュエータ曲がりプロファイル、剛性、揺れ特性、および把持特性を含む個々のアクチュエータの側面を修正するためのモジュール式構成要素を描写する。
アクチュエータ故障は、アクチュエータの材料(例えば、ゴム)が弱化するフィードバック状況を伴う突然の現象であり得、それは、より多くの流体が、アクチュエータの中に入ることを可能にする。対応する圧力の増加は、アクチュエータを弱化させ、アクチュエータの故障で終わるフィードバックループをさらにもたらす。このパターンは、流動センサによって検出されることができ、流動センサは、この現象に対応する所定のパターンの検出に応答して、遮断弁を閉鎖し得る。
Claims (10)
- モジュール式ロボットシステムであって、前記モジュール式ロボットシステムは、
膨張流体を受け取るように構成されているエラストマーブラダを備えている第1のソフトアクチュエータと、
デカルト平面内の前記第1のソフトアクチュエータの絶対位置または前記デカルト平面内の第2のソフトアクチュエータに対する前記第1のソフトアクチュエータの位置を動的に調節するように構成されている位置付けシステムと、
前記第1のソフトアクチュエータを異なるタイプまたは異なるサイズのアクチュエータと交換するための迅速変更アセンブリであって、前記迅速変更アセンブリは、2つ以上の嵌合表面を備え、前記2つ以上の嵌合表面は、前記第1のソフトアクチュエータの形状に対応し、かつ、前記第1のソフトアクチュエータの周囲にシールを形成するように嵌合する、迅速変更アセンブリと、
前記第1のソフトアクチュエータへの前記膨張流体の流動を断つための遮断弁と
を備えている、モジュール式ロボットシステム。 - 前記第1のソフトアクチュエータは、T押し出し成形部を有するレール上で展開され、前記位置付けシステムは、前記第1のソフトアクチュエータを前記レール上で移動させることにより、前記第1のソフトアクチュエータと前記第2のソフトアクチュエータとの間の距離を変化させる、請求項1に記載のモジュール式ロボットシステム。
- 前記第1のソフトアクチュエータは、第1のアレイまたはマトリクスを表す第1の構成において複数のソフトアクチュエータ間で展開され、前記位置付けシステムは、前記複数のソフトアクチュエータを第2のアレイまたはマトリクスを表す第2の構成に再展開するように構成されており、前記第2の構成は、前記第1の構成とは異なる、請求項1に記載のモジュール式ロボットシステム。
- 前記位置付けシステムは、前記第1のソフトアクチュエータをその基部の周りで回転させるための回転機構をさらに備えている、請求項1に記載のモジュール式ロボットシステム。
- 前記位置付けシステムは、前記第1のソフトアクチュエータの位置を3次元で動的に調節する、請求項1に記載のモジュール式ロボットシステム。
- 方法であって、前記方法は、
ソフトアクチュエータと迅速変更アセンブリと遮断弁とを提供することであって、前記ソフトアクチュエータは、デカルト平面内の第1の位置において膨張流体を受け取るように構成されているエラストマーブラダを備え、前記迅速変更アセンブリは、前記ソフトアクチュエータを異なるタイプまたは異なるサイズのアクチュエータと交換するためのものであり、前記迅速変更アセンブリは、2つ以上の嵌合表面を備え、前記2つ以上の嵌合表面は、前記ソフトアクチュエータの形状に対応し、かつ、前記ソフトアクチュエータの周囲にシールを形成するように嵌合し、前記遮断弁は、前記ソフトアクチュエータへの前記膨張流体の流動を断つためのものである、ことと、
前記デカルト平面内の前記ソフトアクチュエータの位置を動的に調節することにより、前記ソフトアクチュエータを前記第1の位置とは異なる第2の位置に設置することと
を含む、方法。 - 前記ソフトアクチュエータの位置を調節することは、前記ソフトアクチュエータをレールに沿って移動させることを含む、請求項6に記載の方法。
- 前記ソフトアクチュエータは、第1のアレイまたはマトリクスを表す第1の構成において複数のソフトアクチュエータ間で展開され、前記ソフトアクチュエータの位置を調節することは、前記複数のソフトアクチュエータを第2のアレイまたはマトリクスを表す第2の構成に再展開することを含み、前記第2の構成は、前記第1の構成とは異なる、請求項6に記載の方法。
- 前記ソフトアクチュエータの位置を調節することは、前記ソフトアクチュエータをその基部の周りで回転させることをさらに含む、請求項6に記載の方法。
- 前記ソフトアクチュエータの位置を調節することは、前記ソフトアクチュエータの位置を3次元で調節することを含む、請求項6に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562174234P | 2015-06-11 | 2015-06-11 | |
| US62/174,234 | 2015-06-11 | ||
| PCT/US2016/037197 WO2016201418A1 (en) | 2015-06-11 | 2016-06-13 | Modular robotic systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018518377A JP2018518377A (ja) | 2018-07-12 |
| JP6879562B2 true JP6879562B2 (ja) | 2021-06-02 |
Family
ID=57504699
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017563575A Active JP6879562B2 (ja) | 2015-06-11 | 2016-06-13 | モジュール式ロボットシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US10179410B2 (ja) |
| EP (3) | EP3307493A4 (ja) |
| JP (1) | JP6879562B2 (ja) |
| CN (1) | CN108367432A (ja) |
| AU (1) | AU2016275158A1 (ja) |
| CA (1) | CA2987480C (ja) |
| WO (1) | WO2016201418A1 (ja) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2017248319A1 (en) * | 2016-04-07 | 2018-10-25 | Soft Robotics, Inc. | Soft robotic actuators for positioning, packaging, and assembling |
| WO2017205653A1 (en) * | 2016-05-25 | 2017-11-30 | Soft Robotics, Inc. | Soft robotic actuators for positioning, packaging, and assembling |
| US10258895B2 (en) | 2016-09-13 | 2019-04-16 | Universal City Studios Llc | Systems and methods for incorporating pneumatic robotic systems into inflatable objects |
| WO2018112388A1 (en) * | 2016-12-16 | 2018-06-21 | Soft Robotics, Inc. | Base systems for supporting soft robotic actuators |
| US11173615B2 (en) | 2017-03-30 | 2021-11-16 | Soft Robotics, Inc. | User-assisted robotic control systems |
| WO2018183819A2 (en) * | 2017-03-30 | 2018-10-04 | Soft Robotics, Inc. | Servo-pneumatic control systems for soft robotic actuators |
| US10850406B2 (en) * | 2017-04-27 | 2020-12-01 | Massachusetts Institute Of Technology | Non-planar shearing auxetic structures, devices, and methods |
| EP3580023B1 (en) * | 2017-05-03 | 2021-07-07 | Max-Planck-Gesellschaft zur Förderung der Wissenschaften e.V. | Gripping apparatus and method of producing a gripping apparatus |
| JP6808181B2 (ja) | 2017-05-18 | 2021-01-06 | Smc株式会社 | ワーク保持装置 |
| JP7289616B2 (ja) * | 2017-06-30 | 2023-06-12 | キヤノン株式会社 | ロボットハンド、ロボット装置、ロボットハンドの制御方法 |
| CN107398916B (zh) * | 2017-09-09 | 2020-07-03 | 北京工业大学 | 一种水压驱动的柔性机械手爪 |
| CN108274486B (zh) * | 2018-03-21 | 2023-11-07 | 知行高科(北京)科技有限公司 | 一种模块化的机器人末端执行器及其重构方法与抓取方法 |
| CN108555944B (zh) * | 2018-03-27 | 2020-06-09 | 江苏大学 | 一种靠伸缩圈伸缩来抓取物体的软体触手 |
| US11584016B2 (en) | 2018-04-24 | 2023-02-21 | Fanuc Corporation | Robot controller and system |
| CN109108957A (zh) * | 2018-08-02 | 2019-01-01 | 浙江大学 | 一种可旋转的全柔性抓手 |
| CN109079753B (zh) * | 2018-08-02 | 2020-07-17 | 浙江大学 | 一种全柔性连续旋转执行器及其方法 |
| US11597101B2 (en) * | 2018-12-17 | 2023-03-07 | Purdue Research Foundation | 3D-architected soft machines with topologically encoded actuation |
| CN109436786A (zh) * | 2018-12-21 | 2019-03-08 | 广东赛德英斯智能装备有限公司 | 一种尺寸自适应式物品抓取方法及实现该方法的装置 |
| CN109760079B (zh) * | 2018-12-25 | 2022-03-01 | 武汉理工大学 | 车身钣金件装配的机器人末端可重构夹持器 |
| CN109746933A (zh) * | 2019-01-14 | 2019-05-14 | 燕山大学 | 一种无系留软体末端执行器 |
| CN109732586B (zh) * | 2019-01-18 | 2021-02-09 | 哈尔滨工业大学 | 一种多级生长型软体机器人 |
| CN109676637A (zh) * | 2019-02-28 | 2019-04-26 | 广东工业大学 | 一种具有仿生抓取结构的机器人 |
| KR102182345B1 (ko) * | 2019-05-03 | 2020-11-24 | 재단법인대구경북과학기술원 | 그리퍼 시스템 |
| WO2020237058A1 (en) | 2019-05-21 | 2020-11-26 | Trustees Of Boston University | Gripping devices and methods for making the same |
| US11724880B2 (en) | 2019-07-29 | 2023-08-15 | Nimble Robotics, Inc. | Storage systems and methods for robotic picking |
| US11738447B2 (en) | 2019-07-29 | 2023-08-29 | Nimble Robotics, Inc. | Storage systems and methods for robotic picking |
| CN110406967B (zh) * | 2019-07-29 | 2021-01-08 | 广东华中科技大学工业技术研究院 | 一种易碎物夹取分拣机器人 |
| CN110539292B (zh) * | 2019-10-09 | 2024-05-28 | 北京化工大学 | 一种具有刚度保持的半软体机器人模块及半软体机器人 |
| US11530621B2 (en) | 2019-10-16 | 2022-12-20 | General Electric Company | Systems and method for use in servicing a machine |
| CN110788881B (zh) * | 2019-11-13 | 2022-08-16 | 上海交通大学 | 真空吸附式锁定关节的气动软体抓手 |
| CN111135019A (zh) * | 2020-02-24 | 2020-05-12 | 合肥工业大学 | 一种囊指及手部康复训练器 |
| CN111469150B (zh) * | 2020-04-21 | 2022-04-29 | 青岛双瑞海洋环境工程股份有限公司 | 一种气动柔性抓持装置 |
| US11536083B2 (en) * | 2020-05-22 | 2022-12-27 | Cardinal Ig Company | Automated spacer processing systems and methods |
| JP2023531644A (ja) * | 2020-06-17 | 2023-07-25 | ナショナル ユニヴァーシティー オブ シンガポール | ロボットグリッパ |
| CN111975796B (zh) * | 2020-08-21 | 2021-12-10 | 华中科技大学 | 软体机器人及其制备方法、无源机器人交流网络、应用 |
| US11932129B2 (en) | 2020-12-21 | 2024-03-19 | Nimble Robotics, Inc. | Mobile robot having pneumatic charging system |
| CN113146662A (zh) * | 2021-03-03 | 2021-07-23 | 南方科技大学 | 一种夹爪指节的驱动控制方法及多自由度抓取装置 |
| WO2022199809A1 (en) * | 2021-03-24 | 2022-09-29 | Brainlab Ag | Patient table mounting frame |
| JP2023034796A (ja) * | 2021-08-31 | 2023-03-13 | 株式会社アマダ | ワーク供給ロボット及びワーク供給システム |
| JP2024039554A (ja) * | 2022-09-09 | 2024-03-22 | 株式会社ブリヂストン | ロボットハンド |
| JP2024039553A (ja) * | 2022-09-09 | 2024-03-22 | 株式会社ブリヂストン | ロボットハンド |
| CN115533958B (zh) * | 2022-11-29 | 2023-03-14 | 中国科学院沈阳自动化研究所 | 一种可调变距抓手 |
| ES2977940A1 (es) * | 2023-01-23 | 2024-09-03 | Consejo Superior Investigacion | Garra robotica para agarre y manipulacion |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3343864A (en) * | 1965-10-07 | 1967-09-26 | James I Baer | Material handling apparatus and the like |
| US4202158A (en) * | 1977-10-18 | 1980-05-13 | Edwards John W | Crop harvesting apparatus |
| EP0250803A3 (de) * | 1986-05-30 | 1989-04-12 | Hämmerle AG | Manipulator für in einer Blechbearbeitungsmaschine zu verformende Blechstücke |
| US4968077A (en) * | 1989-06-09 | 1990-11-06 | The United States Of America As Represented By The Administrator National Aeronautics And Space Administration | Portable hand hold device |
| JPH03190692A (ja) * | 1989-12-18 | 1991-08-20 | Fujitsu Ltd | ロボットハンド |
| GB9120379D0 (en) * | 1991-09-25 | 1991-11-06 | Univ Bristol | Robotic gripper |
| JPH05305506A (ja) * | 1992-05-01 | 1993-11-19 | Olympus Optical Co Ltd | チャック装置 |
| US5250074A (en) * | 1992-07-14 | 1993-10-05 | Wilk Peter J | Surgical instrument assembly and associated technique |
| JPH10249774A (ja) * | 1997-03-11 | 1998-09-22 | Kubota Corp | ロボットハンド用指 |
| US6689074B2 (en) * | 2000-03-28 | 2004-02-10 | Seiko Epson Corporation | Wearable muscular-force supplementing device |
| CN1280070C (zh) * | 2000-03-28 | 2006-10-18 | 精工爱普生株式会社 | 泵一体化的柔性驱动器 |
| JP2002018762A (ja) * | 2000-06-30 | 2002-01-22 | Mitsubishi Heavy Ind Ltd | ロボット把持機構 |
| JP3672867B2 (ja) * | 2001-12-25 | 2005-07-20 | 本田技研工業株式会社 | 脚式移動ロボットの着床衝撃緩衝装置 |
| KR100860522B1 (ko) * | 2002-03-23 | 2008-09-26 | 엘지디스플레이 주식회사 | 액정 패널의 이송장치 |
| AU2003243948A1 (en) * | 2002-06-24 | 2004-01-06 | Matsushita Electric Industrial Co., Ltd. | Articulated driving mechanism, method of manufacturing the mechanism, and holding hand and robot using the mechanism |
| JP2004181585A (ja) * | 2002-12-04 | 2004-07-02 | Seiko Epson Corp | ロボットハンド |
| CN100346942C (zh) * | 2003-06-27 | 2007-11-07 | 松下电器产业株式会社 | 层积型多关节部驱动机构及其制造方法、设置有该机构的抓握手和机器人臂 |
| GB0421820D0 (en) * | 2004-10-01 | 2004-11-03 | Shadow Robot Company The Ltd | Artificial hand/forearm arrangements |
| JP2006255805A (ja) * | 2005-03-15 | 2006-09-28 | Thk Co Ltd | ロボットハンド |
| JP2008260110A (ja) * | 2007-04-13 | 2008-10-30 | Honda Motor Co Ltd | ワーク把持装置およびワーク把持方法 |
| US8025277B2 (en) * | 2008-02-06 | 2011-09-27 | GM Global Technology Operations LLC | Reconfigurable end-of-arm tool for robotic arm |
| JP4592794B2 (ja) * | 2008-09-26 | 2010-12-08 | 株式会社東芝 | ロボットハンド |
| JP5130320B2 (ja) * | 2010-04-28 | 2013-01-30 | トヨタ自動車株式会社 | 把持装置 |
| JP2011240421A (ja) * | 2010-05-17 | 2011-12-01 | Seiko Epson Corp | ロボットハンド、およびロボット |
| US8944481B2 (en) | 2010-12-31 | 2015-02-03 | Fundacion Tecnalia Research & Innovation | Gripping device for manipulating flexible elements |
| JP5993539B2 (ja) * | 2011-01-06 | 2016-09-14 | セイコーエプソン株式会社 | ロボットハンド及びロボット |
| JP2012166297A (ja) * | 2011-02-14 | 2012-09-06 | Seiko Epson Corp | ロボットハンド及びロボット装置 |
| JP2012176461A (ja) * | 2011-02-25 | 2012-09-13 | Yaskawa Electric Corp | ハンドおよびロボット |
| JP5888884B2 (ja) * | 2011-06-20 | 2016-03-22 | キヤノン株式会社 | ロボットハンド |
| EP2728363B1 (en) * | 2011-06-28 | 2021-06-02 | Kabushiki Kaisha Yaskawa Denki | Robot hand and robot |
| EP2834047B1 (en) * | 2012-03-26 | 2018-05-09 | President and Fellows of Harvard College | Systems and methods for providing flexible robotic actuators |
| JP5846057B2 (ja) * | 2012-06-29 | 2016-01-20 | トヨタ自動車株式会社 | 把持装置による把持方法 |
| US9624911B1 (en) * | 2012-10-26 | 2017-04-18 | Sunfolding, Llc | Fluidic solar actuator |
| CN107756425B (zh) * | 2012-11-09 | 2021-08-31 | 艾罗伯特公司 | 顺从欠促动抓紧器 |
| AU2014225893A1 (en) * | 2013-03-04 | 2015-09-17 | President And Fellows Of Harvard College | Magnetic assembly of soft robots with hard components |
| JP6079315B2 (ja) * | 2013-03-05 | 2017-02-15 | セイコーエプソン株式会社 | ロボットハンド、ロボットおよび被挟持物をロボットで保持する保持方法 |
| US9365366B2 (en) * | 2013-06-24 | 2016-06-14 | Intelligrated Headquarters Llc | Robotic container reorganizer |
| JP6591967B2 (ja) * | 2013-10-01 | 2019-10-16 | プレジデント アンド フェローズ オブ ハーバード カレッジ | シート材料からなるソフトデバイス |
| JP5766767B2 (ja) * | 2013-11-05 | 2015-08-19 | ファナック株式会社 | 円筒形対象物を把持するロボットハンド及びロボット |
| US9790968B2 (en) * | 2014-07-17 | 2017-10-17 | President And Fellows Of Harvard College | Soft actuators and soft actuating devices |
| DE102014117703A1 (de) * | 2014-12-02 | 2016-06-02 | Tkr Spezialwerkzeuge Gmbh | Hebevorrichtung für eine Baugruppe eines Kraftfahrzeugs |
-
2016
- 2016-06-13 EP EP16808509.0A patent/EP3307493A4/en not_active Withdrawn
- 2016-06-13 EP EP22204388.7A patent/EP4147829A1/en active Pending
- 2016-06-13 WO PCT/US2016/037197 patent/WO2016201418A1/en unknown
- 2016-06-13 JP JP2017563575A patent/JP6879562B2/ja active Active
- 2016-06-13 EP EP19202378.6A patent/EP3636392B1/en active Active
- 2016-06-13 AU AU2016275158A patent/AU2016275158A1/en not_active Abandoned
- 2016-06-13 US US15/180,653 patent/US10179410B2/en active Active
- 2016-06-13 CA CA2987480A patent/CA2987480C/en active Active
- 2016-06-13 CN CN201680033701.2A patent/CN108367432A/zh active Pending
-
2018
- 2018-12-11 US US16/215,695 patent/US10946531B2/en active Active
-
2021
- 2021-03-08 US US17/194,608 patent/US20210187755A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP3307493A4 (en) | 2019-04-17 |
| WO2016201418A1 (en) | 2016-12-15 |
| CA2987480A1 (en) | 2016-12-15 |
| JP2018518377A (ja) | 2018-07-12 |
| US10946531B2 (en) | 2021-03-16 |
| US20190193283A1 (en) | 2019-06-27 |
| EP4147829A1 (en) | 2023-03-15 |
| EP3636392B1 (en) | 2022-11-02 |
| CN108367432A (zh) | 2018-08-03 |
| EP3307493A1 (en) | 2018-04-18 |
| EP3636392A1 (en) | 2020-04-15 |
| US10179410B2 (en) | 2019-01-15 |
| US20160361821A1 (en) | 2016-12-15 |
| US20210187755A1 (en) | 2021-06-24 |
| CA2987480C (en) | 2024-01-16 |
| AU2016275158A1 (en) | 2017-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6879562B2 (ja) | モジュール式ロボットシステム | |
| US11738471B2 (en) | Soft robotic actuator enhancements | |
| JP7278597B2 (ja) | ロボットエンドエフェクタのための構造 | |
| EP3285976B1 (en) | Enhancement of soft robotic grippers through integration of stiff structures | |
| US10518423B2 (en) | End of arm tools for soft robotic systems | |
| CN108778640A (zh) | 用于杂乱抓持环境、高加速度移动、食品操作以及自动化仓储系统的软机器人抓持器 | |
| WO2018165106A1 (en) | Conformable variable friction manipulator | |
| EP3694689B1 (en) | End of arm tools for soft robotic systems | |
| AU2015350006A1 (en) | Soft robotic actuator enhancements | |
| US11072080B2 (en) | End of arm tools for soft robotic systems | |
| US20190084165A1 (en) | End of arm tools for soft robotic systems | |
| JP2019517393A (ja) | 位置付け、包装、組立のためのソフトロボットアクチュエータ | |
| Belfiore et al. | Optimal Joint Stiffness Regulation in a Planar Robot for Packaging Operations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190612 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210422 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6879562 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |