CN107756425B - 顺从欠促动抓紧器 - Google Patents
顺从欠促动抓紧器 Download PDFInfo
- Publication number
- CN107756425B CN107756425B CN201710983311.8A CN201710983311A CN107756425B CN 107756425 B CN107756425 B CN 107756425B CN 201710983311 A CN201710983311 A CN 201710983311A CN 107756425 B CN107756425 B CN 107756425B
- Authority
- CN
- China
- Prior art keywords
- phalanx
- grasper
- proximal
- distal
- joint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/10—Gripping heads and other end effectors having finger members with three or more finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0009—Gripping heads and other end effectors comprising multi-articulated fingers, e.g. resembling a human hand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0206—Gripping heads and other end effectors servo-actuated comprising articulated grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0475—Exchangeable fingers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0015—Flexure members, i.e. parts of manipulators having a narrowed section allowing articulation by flexion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Prostheses (AREA)
Abstract
一种顺从欠促动抓紧器包括基部和多个手指。多个手指中的至少一个包括:近侧指骨;将近侧指骨连接于基部的近侧接头;远侧指骨;将远侧指骨连接于近侧指骨的远侧接头;以及用于移动指骨的部件。近侧接头和远侧接头中的至少一个包括挠曲接头,该挠曲接头具有沿第一方向的第一顺从性和沿第二方向的第二顺从性,第二顺从性比第一顺从性更硬。远侧指骨包括:圆形端面;以及提升部分,其包括在圆形端面附近的提升边缘。部件平行于第一方向起作用。抓紧器进一步包括与部件相关联的至少一个促动器。抓紧器具有少于自由度的促动器。
Description
本申请是于2015年5月8日进入中国国家阶段的PCT专利申请PCT/US2013/069182(申请日为2013年11月8日,中国国家申请号为201380058552.1,发明名称“顺从欠促动抓紧器”)的分案申请。
相关申请
本申请要求2012年11月9日提交的美国临时专利申请No. 61/724,506、2012年11月9日提交的No. 61/724,512,以及2012年11月9日提交的No. 61/724,517;以及2013年3月15日提交的美国专利申请No. 13/833,580、2013年3月15日提交的No. 13/833,631和2013年3月15日提交的No. 13/833,687的权益和优先权,这些申请的公开通过引用以它们的整体并入本文中。
政府支持声明
本发明是在美国国防部先进研究项目局(DARPA)关于DARPA自主机器人操纵-硬件轨迹(ARM-H)所授予的DARPA合同No. W91CRB-10-C-0141的支持下完成的。政府对本发明具有某些权利。
背景技术
端部效应器或抓紧器通常安装在机器人臂上,并且用于操纵和/或抓持选定环境中的物体。环境可为结构化或非结构化的。
发明内容
根据本发明的实施例,一种顺从欠促动抓紧器包括基部和多个手指。多个手指中的至少一个包括:近侧指骨;将近侧指骨连接于基部的近侧接头;远侧指骨;将远侧指骨连接于近侧指骨的远侧接头;以及用于移动指骨的部件。近侧接头和远侧接头中的至少一个包括挠曲接头,挠曲接头具有沿挠曲接头的第一方向的第一顺从性和沿挠曲接头的第二方向的第二顺从性,其中,第二顺从性比第一顺从性更硬。远侧指骨包括:圆形端面;以及提升部分,其包括在圆形端面附近的提升边缘。部件平行于挠曲接头的第一方向起作用。抓紧器进一步包括与部件相关联的至少一个促动器。抓紧器具有少于自由度的促动器。
在一些实施例中,提升边缘是自由终端边缘,并且远侧指骨包括限定在圆形端面和提升边缘之间的提升凹槽。根据一些实施例,圆形端面在基本上垂直于提升凹槽的纵向轴线的平面中限定弧形。在一些实施例中,提升凹槽具有范围为大约1 mm至3 mm的深度。
圆形端面可由比提升部分更软的材料形成。在一些实施例中,圆形端面的更软的材料具有范围为大约0肖氏硬度A至60肖氏硬度A的硬度,并且提升部分具有至少大约100Gpa的硬度。
抓紧器可包括能够运行来选择性地调节提升边缘相对于圆形端面的位置的调节机构。
在一些实施例中,远侧指骨具有基本上平坦的内部抓持面和独特的相对的沿轴向延伸的内部侧边缘。
根据本发明的实施例,一种顺从欠促动抓紧器包括基部和多个手指。多个手指中的至少一个包括:近侧指骨;将近侧指骨连接于基部的近侧接头;远侧指骨;将远侧指骨连接于近侧指骨的远侧接头;以及用于移动指骨的部件。近侧接头和远侧接头中的至少一个包括挠曲接头,挠曲接头具有沿挠曲接头的第一方向的第一顺从性和沿挠曲接头的第二方向的第二顺从性,其中,第二顺从性比第一顺从性更硬。部件平行于挠曲接头的第一方向起作用。抓紧器进一步包括与部件相关联的至少一个促动器。远侧指骨具有基本上平坦的内部抓持面和独特的相对的沿轴向延伸的内部侧边缘。抓紧器具有少于自由度的促动器。
在一些实施例中,平坦内部抓持面基本上平行于挠曲接头的主弯曲轴线。
平坦内部抓持面可由弹性体材料形成。
在一些实施例中,挠曲接头包括由弹性体材料形成的挠曲连结件。
在一些实施例中,远侧指骨在垂直于第一方向的横截面中为基本上长方形。
根据本发明的实施例,一种顺从欠促动抓紧器包括基部、两个手指趾和与两个手指趾相对的拇指趾。手指趾和拇指趾均包括:近侧指骨;远侧指骨;将近侧指骨直接连接于远侧指骨的远侧接头,远侧接头沿第一方向是顺从的;将近侧指骨直接连接于基部的近侧接头,近侧接头沿第二方向是顺从的;以及用于移动近侧指骨和远侧指骨的腱索,其中,腱索基本上平行于顺从性的第一方向,并且基本上改变远侧接头沿第一方向的顺从性。抓紧器进一步包括用以移动手指趾和拇指趾的至少一个促动器。各个远侧指骨具有为连接于其的近侧指骨的长度的0.60倍至0.66倍的长度。两个手指趾中的各个的近侧接头与拇指的平均距离是两个手指趾的近侧指骨的平均长度的1.30倍至1.44倍。抓紧器具有少于自由度的促动器。
在一些实施例中,基部包括在手指趾和拇指趾之间的手掌,并且手掌具有范围为近侧指骨的平均长度的大约1.21倍至1.33倍的主要尺寸。
在一些实施例中,手指趾的近侧接头之间的间距的范围为近侧指骨的平均长度的大约0.97倍至1.08倍。
根据本发明的实施例,一种顺从欠促动抓紧器包括手掌基部和两个手指。手指中的各个包括:近侧指骨;远侧指骨;将远侧指骨连接于近侧指骨的顺从挠曲接头;以及将近侧指骨连接于手掌基部的销接头,销接头约束近侧指骨相对于手掌基部的角移动,以围绕销枢转轴线旋转。抓紧器进一步包括用以移动手指的至少一个促动器。抓紧器具有少于自由度的促动器。
抓紧器可进一步包括与各个手指相关联的销接头角传感器。
抓紧器可进一步包括将各个手指连接于手掌基部的旋转接头,其中,手指可相对于手掌基部围绕旋转接头旋转,以使其销枢转轴线相对于手掌基部重新定向。
在一些实施例中,抓紧器进一步包括拇指和用以独立于手指来移动拇指的至少一个促动器。拇指包括:近侧指骨;远侧指骨;将远侧指骨连接于近侧指骨的顺从挠曲接头;以及将近侧指骨连接于手掌基部的销接头,销接头约束近侧指骨相对于手掌基部的角移动,以围绕销枢转轴线旋转。
根据本发明的实施例,一种顺从欠促动抓紧器包括手掌基部和两个手指。手指中的各个包括:近侧指骨;远侧指骨;将远侧指骨连接于近侧指骨的顺从挠曲接头;将近侧指骨连接于手掌基部的销接头,销接头具有围绕销枢转轴线的占优势自由度;以及腱索,其用于移动近侧指骨和远侧指骨,使得腱索的移动生成近侧指骨以大于远侧指骨围绕挠曲接头的角运动的速率围绕销枢转轴线的角运动。抓紧器进一步包括用以移动手指的至少一个促动器。抓紧器具有少于自由度的促动器。
在一些实施例中,挠曲接头包括由顺从弹性体材料形成的挠曲连结件。
根据一些实施例,枢转接头将近侧指骨连接于手掌基部,用于围绕枢转接头沿第一方向和第二方向旋转,抓紧器包括返回偏动弹簧,其用以沿第二方向将近侧指骨驱动到返回位置,返回偏动弹簧具有第一弹簧速率,挠曲接头构造成将远侧指骨偏置到相对于近侧指骨的打开位置,并且具有第二弹簧速率,并且第二弹簧速率大于第一弹簧速率。在一些实施例中,第二弹簧速率是第一弹簧速率的至少八倍。在一些实施例中,第一弹簧速率足以在腱索松驰的情况下在抓紧器的任何定向上将近侧指骨固持在返回位置,并且第二弹簧速率足以在腱索松驰的情况下在抓紧器的任何定向上将远侧指骨固持在打开位置。
根据本发明的实施例,一种顺从欠促动抓紧器包括手掌基部和两个手指。手指中的各个包括:近侧指骨;远侧指骨;将远侧指骨连接于近侧指骨的顺从挠曲接头;枢转接头,其将近侧指骨连接于手掌基部,用于围绕枢转接头沿第一方向和第二方向旋转;用于使近侧指骨沿第一方向移动的腱索;用以沿第二方向将近侧指骨驱动到返回位置的返回偏动弹簧,其中,返回偏动弹簧的弹簧速率足以在腱索松驰的情况下在抓紧器的任何定向上将近侧指骨固持在返回位置。抓紧器进一步包括与各个腱索相关联的至少一个促动器。抓紧器具有少于自由度的促动器。
在一些实施例中,返回偏动弹簧包括扭转弹簧。
根据本发明的实施例,一种抓紧器包括基部、手指、腱索和磁分离机构。手指具有通过近侧接头连接于基部的近侧端部。腱索构造成相对于基部移动手指。磁分离机构将手指可释放地联接于基部。
在一些实施例中,腱索延伸穿过磁分离机构并且延伸到手指。磁分离机构可包括:手指基台,其中,手指通过近侧接头可枢转地连接于手指基台;以及在基部上的基部基台;其中,手指基台和基部基台彼此磁吸引,并且手指基台经由基部基台连接于基部。根据一些实施例,磁分离机构包括至少一个定位器特征,其用以在手指基台和基部基台分开并且重新连结时,重新对齐手指基台与基部基台。至少一个定位器特征可包括环形或半环形凹槽。
在一些实施例中,磁分离机构运行来在负载超过施加于手指的阈值负载时释放手指,以相对于基部偏转。
根据本发明的实施例,一种顺从欠促动抓紧器包括基部、两个手指趾和与两个手指趾相对的拇指趾。手指趾和拇指趾均包括:近侧指骨;远侧指骨;将近侧指骨直接连接于远侧指骨的远侧接头,远侧接头沿第一方向是顺从的;将近侧指骨直接连接于基部的近侧接头,近侧接头沿第二方向是顺从的;以及用于移动近侧指骨和远侧指骨的腱索,其中,腱索基本上平行于顺从性的第一方向,并且基本上改变远侧接头沿第一方向的顺从性。抓紧器进一步包括用以移动手指趾和拇指趾的至少一个促动器。拇指趾进一步包括第二腱索,其用于选择性地抑制其与第一腱索相对的近侧指骨,以使得远侧指骨能够独立于近侧指骨移动。抓紧器具有少于自由度的促动器。
在一些实施例中,抓紧器包括用以促动拇指趾的第一腱索的第一促动器和用以促动拇指趾的第二腱索的第二促动器。
根据一些实施例,各个手指趾不包括腱,其用于选择性地抑制其与其腱索相对的近侧指骨,以使得远侧指骨能够独立于近侧指骨移动。
根据本发明的实施例,一种顺从欠促动抓紧器包括基部、两个手指趾和与两个手指趾相对的拇指趾。手指趾和拇指趾均包括:近侧指骨;远侧指骨;将近侧指骨直接连接于远侧指骨的远侧接头,远侧接头沿第一方向是顺从的;将近侧指骨直接连接于基部的近侧接头,近侧接头沿第二方向是顺从的;以及用于移动近侧指骨和远侧指骨的腱索,其中,腱索基本上平行于顺从性的第一方向,并且基本上改变远侧接头沿第一方向的顺从性。抓紧器进一步包括用以移动手指趾和拇指趾的至少一个促动器。腱索能够传输范围为大约60lbf至120 lbf的持续拉伸负载,在弯曲之后展现低能量存储,并且对于小于一毫米的弯曲半径是稳健的。抓紧器具有少于自由度的促动器。
在一些实施例中,手指趾和拇指趾中的至少一个包括将近侧接头可释放地联接于基部的磁分离机构。
通过阅读附图和以下实施例的详细描述,本领域技术人员将认识到本发明的另外的特征、优点和细节,此类描述仅说明本发明。
附图说明
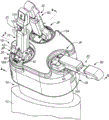
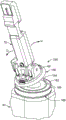
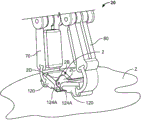
图1是机器人的片断透视图,该机器人包括根据本发明的实施例的抓紧器。
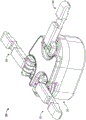
图2是图1的抓紧器的正视透视图。
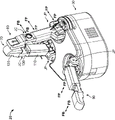
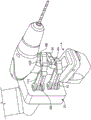
图3是图1的抓紧器的后视透视图。
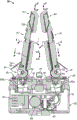
图4是沿着图1的线4-4得到的图1的抓紧器的横截面图。
图5是沿着图1的线5-5得到的图1的抓紧器的横截面图。
图6是图1的抓紧器的俯视平面图。
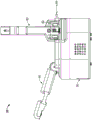
图7是图1的抓紧器的侧视立面图。
图8是图1的抓紧器的后视立面图。
图9是形成图1的抓紧器的部分的手指的俯视透视图。
图10是图9的手指的仰视透视图。
图11是沿着图9的线11-11得到的图9的手指的横截面图。
图12是图9的手指的放大片断侧视图。
图13是图9的手指的俯视平面图。
图14是图9的手指的侧视图。
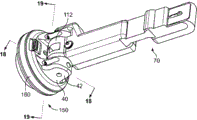
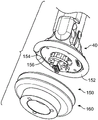
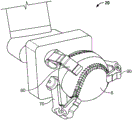
图15是图9的手指和相关联的磁分离系统的俯视透视图。
图16是图15的手指和磁分离系统的分解片断仰视透视图。
图17是图15的手指和磁分离系统的分解片断俯视透视图。
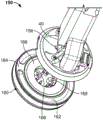
图18是沿着图15的线18-18得到的图15的磁分离系统的横截面图。
图19是沿着图15的线19-19得到的图15的磁分离系统的横截面图。
图20是图15的磁分离系统的分解片断横截面仰视透视图。
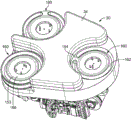
图21是形成图1的抓紧器的一部分的基部的俯视透视图,该基部包括形成磁分离系统的一部分的基台。
图22是图15的手指和磁分离系统的片断透视图,其示出磁分离系统的运行。
图23-29示出可由图1的抓紧器执行的各种手指构造。
图30A和30B示出图1的抓紧器抓住和捡起物体的移动顺序。
具体实施方式
现在将参照附图在下文中更全面地描述本发明,在该附图中显示本发明的示例性实施例。在图中,为了清楚,可放大区域或特征的相对大小。然而,本发明可体现为许多不同的形式,并且不应当理解为受限于本文阐述的实施例;相反,这些实施例提供成使得本公开将是详尽和完整的,并且将对本领域技术人员全面地传送本发明的范围。
将理解的是,当元件被称为“联接”或“连接”于另一个元件时,其可直接联接或连接于其它元件,或者也可存在居间元件。相反地,当元件被称为“直接联接”或“直接连接”于另一个元件时,不存在居间元件。相同标号遍及表示相同元件。
另外,诸如“下方”、“下面”、“下部”、“上方”、“上部”等的空间相对用语可在本文用来便于描述,以描述一个元件或特征与图中示出的另一个元件(一个或多个)或特征(一个或多个)的关系。将理解的是,除了图中描绘的定向之外,空间相对用语意于包含正在使用或运行的装置的不同定向。例如,如果图中的装置倒过来,则描述为在其它元件或特征“下方”或“下面”的元件将接着定向在其它元件或特征“上面”。因而,示例性用语“下方”可包含上面和下面的定向两者。装置可按另外的方式定向(旋转90度或处于其它定向),并且相应地解释在本文使用的空间相对描述符。
本文使用的用语仅是为了描述特定实施例的目的,并且不意于限制本发明。如本文所用,单数形式“一”、“一个”和“该”意于还包括复数形式,除非上下文另外清楚地指示。将进一步理解的是,当在该说明书中使用时,用语“包括”和/或“包含”规定存在所陈述的特征、整数、步骤、运行、元件和/或构件,但不排除存在或添加一个或更多个其它特征、整数、步骤、运行、元件、构件和/或它们的组合。如本文所用,表达“和/或”包括相关联所列物品中的一个或更多个的任何和所有组合。
除非另外限定,本文使用的所有用语(包括技术和科学用语)具有与本发明所属领域的技术人员通常理解的相同的含义。将进一步理解的是,诸如在常用词典中限定的那些的用语应当解释为具有与它们在相关领域的上下文中的含义一致的含义,并且将不在理想化或过于正式的意义上解释,除非本文明确地如此限定。
本发明的实施例涉及端部效应器或抓紧器。本文公开的抓紧器可形成机器人或假体设备的一部分。特别地,抓紧器可安装在机器人臂上,并且用于操纵和抓持结构化或非结构化环境中的物体。抓紧器可用作似人机器人的抓紧器或“手”,并且/或者可遵照在DARPA自主机器人操纵硬件(ARM-H)程序下规定的标准。
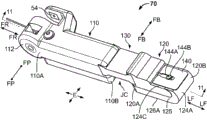
参照附图,在其中显示根据本发明的实施例的机器人10(图1),并且其包括臂12和通过腕接头14可旋转地联接于臂12的抓紧器20。
抓紧器20包括基部组件30、第一手指70、第二手指80和拇指90。手指70、80和拇指90可同样地构建,除了它们在基部30上的布置和如下面论述的促动方法和促动机构之外。除非另有说明,否则“手指”和“多个手指”也称为拇指90。抓紧器20具有主轴线或纵向轴线LG-LG(图4)。
基部30包括第一手指促动器60、第二手指促动器62、拇指收缩筋促动器64、拇指对抗肌促动器66和手指旋转促动器68。促动器60、62、64、66、68可为电动马达(例如DC马达)。腱索60A和62A(图4)分别连接于手指70和80,以使用促动器60和62引起手指70和80的受控制移动。腱索64A、66A(图5)连接于拇指90,以分别使用促动器64和66引起拇指90的受控制移动。手指70、80、90中的各个可通过腱60A、62A、64A、66A和促动器60、62、64、66在相应的近侧销枢转接头JP处围绕轴线FP-FP(图2)枢转。另外,手指70和80可通过促动器68在相应的旋转接头JR处围绕旋转轴线FR-FR(图8)沿相反的方向K旋转。手指70和80通过连结联接,以使它们围绕接头JR沿彼此相反的方向一前一后地旋转。各个手指70、80、90还可围绕远侧顺从挠曲接头JC(图1)弯曲,如下面描述的。
基部组件30包括框架32和在框架32的运行侧上的手掌34。三个磁基部基台160安装在框架32中,并且三个相关联的手指基部基台40安装在三个磁基部基台160上(图15)。在正常运行期间,各个基台160及其相关联的基台40联接成如单个单元有效地起作用。手指70和80的基台160能够在接头JR处旋转。
手指70、80、90可如上面论述地相同或相似地构建。将描述示例性手指70,并且将认识到的是,该描述将同样适用于其它手指80和90。
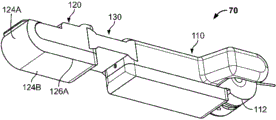
参照图9-14,手指70包括在顺从远侧指骨间挠曲接头JC处由顺从挠曲连结件130联接的近侧指骨110和远侧指骨120。手指70还具有将手指70联接于其手指基部安装件40的铰接件特征112。手指70具有纵向轴线LF-LF。更特别地,近侧指骨110具有近侧端部110A和远侧端部110B。远侧指骨120具有近侧端部120A和远侧端部120B。在端部110A上提供铰接件特征112。挠曲连结件130固定于端部110B和120A。端部120B是自由的。远侧延伸或板部件140安装在端部120B上。
铰接件特征112通过枢转销50枢转地联接于手指基部基台40上的协作的铰接件特征42(图1),枢转销50限定销枢转轴线FP-FP,以形成近侧销枢转接头JP。手指70围绕枢转接头JP的旋转移动约束成沿手指闭合枢转方向F和手指打开枢转方向H围绕枢转轴线FP-FP枢转。手指70限定平行于纵向轴线LF-LF和枢转轴线FP-FP中的各个的手指侧向平面E。将认识到的是,枢转轴线FP-FP的定向将取决于基台40围绕轴线FR-FR的旋转位置而改变。
在一个实施例中,设置在接头JP中的角位置传感器54检测指骨110相对于基部30的角位置。例如,磁性编码器可安装在接头JP的一部分(例如,铰接件特征43)上,并且协作磁体可安装在接头JP的另一部分(例如,铰接件特征112)上。
在接头JP中提供偏置部件52(图4和7)。根据一些实施例,偏置部件52是扭转弹簧,并且特别地,可为螺旋扭转弹簧。扭转弹簧52用作平衡弹簧或偏置返回弹簧。在没有腱索或外力的抑制的情况下,扭转弹簧52将迫使手指70沿方向I枢转到大开位置。
挠曲连结件130是半刚性、柔性、有弹性并且顺从的。在一些实施例中,挠曲连结件130由弹性体材料形成。挠曲连结件130优先围绕远侧或挠曲接头枢转轴线FB-FB沿向内方向、主要方向M和向外方向N中的各个挠曲或弯曲。挠曲连结件130还可沿垂直于或横向于手指闭合方向F的相反的侧面或侧向、次要方向P挠曲或弯曲。因而,挠曲连结件130和接头JC具有沿第一方向M的第一顺从性和沿第二方向P的第二顺从性。第二方向P垂直于或横向于腱索收回方向H。第一顺从性大于第二顺从性(即,需要较少的力来使挠曲连结件130沿第一方向偏转)。当放松并且无负载时,挠曲连结件130将有弹性地返回到放松位置或放松状态,如图9-11中显示的。根据一些实施例,当挠曲连结件130处于其返回位置时,近侧指骨110和远侧指骨120基本上平行或同轴。
腱索60A从促动器60发送穿过基台40、160中的腱滚道158、168,沿着铰接件特征112的内侧,穿过近侧指骨110中的腱滚道118,横跨挠曲接头JR,以及穿过远侧指骨120中的滚道128,并且锚定于远侧指骨120(例如,在滚道28中)。促动器60可沿方向H将腱索60A拉过滚道118、158、168,以使手指70沿闭合方向F枢转。接着,促动器60可沿相反的方向释放或放松腱索60A,以容许手指70在扭转弹簧52的扭矩下沿打开方向I枢转。
现在将更详细地论述手指70的运行(和手指80和拇指90的对应的运行)。在手指70处于完全打开位置(图23)的情况下,促动器60拉腱索60A。来自扭转弹簧52的弹簧力或阻力小于挠曲连结件130的刚度或弹簧力或弯曲阻力。因此,假设近侧指骨110未遇到外部阻力,在腱索60A对手指70施加张力负载时,手指70将首先围绕销枢轴JP移位,并且其次围绕挠曲接头JC移位。也就是说,近侧指骨110围绕枢转销轴线FP-FP枢转地旋转的角距离将大于远侧指骨120围绕挠曲接头轴线FB-FB枢转地旋转或弯曲的角距离。
如果并且当近侧指骨110被外部物体(例如,抓持的物体)阻碍或达到极限(例如,降到基部30上)时,腱索60A的张力负载的更大部分或全部将施加于挠曲接头JC,并且接着远侧指骨120将以比近侧指骨110围绕销枢转轴线FP-FP旋转的速率更大的速率围绕挠曲接头轴线FB-FB弯曲或旋转。
指骨110和120围绕它们的相应的枢转轴线移位的速率差将取决于扭转弹簧52和挠曲连结件130的相对有效弹簧力。根据一些实施例,挠曲接头JC的弹簧力至少是销枢转接头JP的弹簧力的8倍,并并且在一些实施例中,范围为销枢转接头JP的弹簧力的大约8倍至12倍。在一些实施例中,扭转弹簧52的弹簧速率大得足以完全抵销当抓紧器20静止并且不被外部物体作用时,手指70在任何预期定向上的重力。根据一些实施例,扭转弹簧52的弹簧力介于完全抵销当抓紧器20静止并且不被外部物体作用时,手指70在任何预期定向上的重力所必需的最小力的大约100%到150%之间。通过最小化扭转弹簧力,设计者可降低挠曲接头JC的所需弹簧速率。进而,减小促动器60必须克服的返回力。
值得注意地,挠曲接头JC的弹簧力可如期望和/或需要的高。特别地,当抓紧器的大小按比例增加并且用来提升较大和较重的物体时,可增大挠曲接头JC的弹簧力。
图1和23-29显示可由抓紧器20采取或执行的手指70、80、90的各种构造。
图23显示大开位置或就绪位置,其中,腱索60A、62A、64A是松驰的,从而容许扭转弹簧52迫使各个手指70、80、90沿其打开方向达到其极限。
图1显示手指70、80处于收缩构造,这可在促动器60、62拉动手指70、80(经由腱索60A、62A)使其在无相当大阻力的情况下闭合时实现。对于该操作,手指旋转促动器68首先可用来使手指70、80关于它们的基本上平行的枢转轴线FP-FP彼此相对地旋转。图24示出用来保持和/或操纵物体2(诸如平钥匙)的经修改的收缩构造。
图23、25和26显示手指70、80、90从大开构造(图23)逐渐进入功率抓持构造(图26),其中,拇指90与手指70、80交叉。对于该操作,旋转促动器68可用来使手指70、80关于基本上平行的手指70、80、90的枢转轴线FP-FP与拇指90相对地旋转,如图25中显示的。图27示出用来保持和/或操纵物体4(诸如功率工具)的经修改的功率抓持构造。示例性功率工具4具有把手4A和触发器4B。抓紧器20使用手指70、80、90牢固地保持把手4A,并且还可用来通过经由腱索62A对手指80施加张力和释放来自手指80的张力,以使其远侧指骨120将在挠曲接头JC处独立地弯曲来运行触发器4B,并且压制和释放触发器4B(近侧指骨110由把手4A限制或约束)。
图28显示手指70、80、90处于球形抓持位置。对于该操作,手指70、80旋转,以使它们的枢转轴线FP-FP相对于拇指90的枢转轴线FP-FP以倾角延伸。图29示出经修改的球形抓持位置,其中,抓紧器20保持物体6,诸如球。
将认识到的是,前述不是可使用抓紧器20实现的构造和操纵的穷举。
指骨110和120的长度与手指和拇指基部位置之间的关系可提供有利性能。在一些实施例中,这些关系是可缩放的。
根据一些实施例,各个手指70、80的近侧指骨110的长度L1(图13)大于同一手指的远侧指骨120的长度L2。根据一些实施例,长度L1的范围为长度L2的大约0.60倍至0.66倍。
在一些实施例中,从各个手指70、80基部枢转接头JP至拇指90枢转接头JP的平均距离D1(图6)的范围为平均近侧指骨长度L1的大约1.30倍至1.44倍。
根据一些实施例,手掌34的主要尺寸L3(图6)的范围为平均近侧指骨长度L1的大约1.21倍至1.33倍。
在一些实施例中,手指70、80的枢转接头JP之间的间距D2(图6)的范围为平均近侧指骨长度L1的大约0.97倍至1.08倍。
提供均具有如描述的近侧销枢转接头和远侧挠曲接头的手指可提供某些优点。在手指的基部处的刚性枢转提供收缩稳定性和扭转强度,以便于精细操纵和重物提升。在远侧接头处的挠曲接头提供误用的鲁棒性,并且提高手指适应或符合未知形状物体的能力。根据一些实施例并且如显示的,各个手指的销枢转轴线FP-FP基本上平行于手指的主挠曲轴线FB-FB。
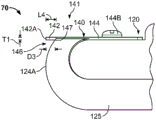
参照图9-12,根据一些实施例,抓紧器20设有指甲系统141。指甲系统141包括远侧板部件140,远侧板部件140在其远侧端面12附近安装在各个手指70、80、90的远侧指骨120上。将在下文中描述手指中的仅一个70。然而,将认识到的是,该描述同样适用于手指80和90。
远侧板部件140包括基部部分144和自由终端提升边缘142A。基部部分144具有槽口144A,并且通过紧固件144B(诸如螺钉)可调节地固定于指骨120的背面124C。自由边缘142A位于端面124A附近。在一些情况下,以及如显示的,远侧板部件140具有延伸部分142,延伸部分142在自由边缘142A中终止,并且沿轴向悬垂(悬吊)或延伸超过位置147,其中,板部件140从指骨120分叉,以形成凸缘。然而,在其它实施例中,自由边缘142A可与位置147重合或在其内侧。
在一些实施例中,紧固件144B和凹槽144A可用作调节机构。更特别地,紧固件144B可松开,板部件140滑动,以如期望地相对于端面124A来定位边缘142A,并且接着紧固件144B重新张紧,以将板部件140固定就位。将认识到的是,可使用其它适当的调节机构。
板部件142至少在自由边缘142A的区域中是相对薄的。根据一些实施例,自由边缘142A具有厚度T1(图12),其范围为大约0.02英寸至0.03英寸。在一些实施例中,延伸部分142从位置147到自由边缘142A的长度L4为至少1mm,并且在一些实施例中,从大约1.5 mm至2.5 mm。根据一些实施例,自由边缘142A基本上平行于挠曲接头轴线FB-FB。
根据一些实施例并且如显示的,端面124A和板部件140相对地构造和布置成在延伸区段142的下侧和端面124A的相对的表面之间限定沿侧向延伸的槽口、凹槽或底切部146。在一些实施例中并且如显示的,端面124A在形状上设置成沿轴向缩小,以形成底切部146。在一些实施例中,端面124A为圆形或曲线形,并且在一些实施例中,其横截面为弓形(即,在垂直于平面E并且平行于远侧指骨120的纵向轴线的平面中)。
根据一些实施例,底切部146的深度D3的范围为大约1 mm至3 mm。根据一些实施例,底切部146的宽度W1的范围为大约10 mm至25 mm。
在一些实施例中,板部件140是刚性的(例如,由钢或不锈钢形成),并且端面124A为相对软或顺从的(例如,由柔韧的橡胶形成)。如显示的,远侧指骨120包括软垫125,软垫125包括端面124A。在一些实施例中,垫125具有范围为大约0肖氏硬度A至60肖氏硬度A的硬度,并且在一些实施例中,大约10肖氏硬度A至40肖氏硬度A,并且板部件140具有至少大约100 Gpa的刚度,并且在一些实施例中,至少180 Gpa。
板部件140可用来以如下方式捡起、接合和/或操纵物体,该方式在没有“指甲”的情况下不可行或将是麻烦的。薄的刚性板部件140(“指甲”)和柔韧的软垫125(“手指尖部”)的组合使得手指能够在其间(即,在底切部146中)捕捉物体的边缘。例如,如果物体设置在支承表面上(例如,桌子表面),则板部件140可压靠在支承表面上,接着在物体下方平移(在物体和支承表面之间),并且接着用来提升物体。顺从挠曲接头JC补充指甲系统141的功能性。接头顺从性使得板部件140能够与支承表面适应性地对齐和保持接触。
参照图30A和30B,在其中显示了抓紧器20执行一系列步骤或移动来从平坦表面Z(例如,桌子或地板)抓持和捡起物体2(如显示的,相对平的钥匙)。
最初,钥匙2平放在表面Z上。参照图30A,抓紧器20定位成使得手指70的板部件140的延伸区段142邻近钥匙2的侧边缘2A置于表面Z上,其中,底切部146和软垫125覆在延伸区段142上面。手指80的指骨120放置成抵靠表面Z,并且沿方向J朝钥匙2和手指70驱动,手指70和80相对地设置成处于收缩构造。在手指80沿方向J驱动时,其接合钥匙2的侧边缘2B,并且将侧边缘2A推到板部件140上(在一些实施例中,推到底切部146中和延伸区段142与软垫125之间)。手指80的指骨120进一步朝手指70驱动,并且向上驱动,以从表面Z提起侧边缘2B。钥匙2从而翻动,或者围绕其边缘2A向上枢转并且沿方向K朝手指70的端面124A枢转,如图30A中显示的,边缘2A捕捉在板部件140和垫125之间。参照图30B,手指80用来继续提升钥匙2并且与手指70会聚,直到钥匙2夹在手指70和80的端面124A之间,端面124A分别接合钥匙2的相对的面2D和2C。
因而可使用抓紧器20的“指甲”或“多个指甲”和手指70,80(以及在一些实施例中,基部30和/或臂12)的协作移动,来抓持、从平坦表面移除和操纵相对平的物体,诸如钥匙(或信用卡等)。
在一些实施例中并且如显示的,远侧指骨120的沿轴向延伸的前侧边缘126A是尖锐或独特的,而正面124B(即,接触面或接合面)是基本上平或平坦的(图9和10)。根据一些实施例,与正面124B一起形成侧边缘126A的远侧指骨120的侧壁在正面124B处和其附近是基本上平坦的,并且在一些实施例中,基本上垂直于正面124B的平面延伸。正面124B可带有纹理。如显示的,这些边缘126A和正面124B可为软垫125的边缘和正面。在一些实施例中,正面124B的平面基本上平行于枢转销轴线FP-FP和挠曲接头主轴线FB-FB。
在使用中,所描述的构造协助稳定远侧指骨120。例如,当手指70、80用来掐远侧指骨120之间的物体时,尖锐侧边缘126A和平坦正面124B可减少或消除远侧指骨120围绕它们的挠曲接头JC扭曲的倾向。尖锐边缘124A还可协助与物体进行牢固且精确的接合。
在一些实施例中,远侧指骨120为棱柱形,并且具有基本上长方形横截面。在一些实施例中,近侧指骨110也是棱柱形的,并且具有基本上长方形横截面。
参照图15-22,抓紧器20还可设有将手指70、80、90中的各个联接于基部30的磁分离系统或机构150。手指70、80、90中的各个的分离特征可基本上相同或相似,并且因此以下关于手指70的描述同样适用于手指80和90。
磁分离系统150包括手指基部基台40和磁基部基台160。磁166固定在基台160中,并且铁磁部件或板156(例如,由钢形成)附加在基台40中。可在基台160中提供磁场集中器153。
基台40具有沿周向延伸的定位器凸缘152,定位器凸缘152在其中限定旋转对齐槽口154。基台160具有沿周向延伸的半环形定位器凹槽162,定位器凹槽162在其中具有旋转对齐突片164。定位器凸缘152承坐在定位器凹槽162中,使得突片164承坐在槽口154中。腱索60A延伸穿过分别限定在基台40和160中的轴向腱滚道158和168。同样,在手指80的情况下,腱索62A延伸穿过滚道158和168。在拇指90的情况下,腱索64A和66A延伸穿过沿轴向延伸的滚道158和168中的相应的滚道。
在使用中,磁分离系统150可用来使手指70、80、90与基部30脱离,以防止或减小损伤手指或接头的风险。当手指上的负载超过规定阈值负载时,克服构件156和166之间的磁吸引,并且基台40与基台160分开(部分地或全部)。例如,手指70及其基台40可沿偏转方向G偏转远离协作基台160,如图22中显示的。当手指上的负载解除(例如,通过移除物体或运行相关联的促动器来放松腱索)时,腱索中的磁吸引或张力将再次将基台40和160拉到一起。例如,手指70及其基台40可沿返回方向H返回或枢转回到协作基台160上,如图22中显示的。腱穿过滚道158、168的拉力将倾向于将基台40、160拉动成同轴对齐。在基台40与基台160少量地分离偏转的情况下,定位器特征152、154、162、164的形状可自动导引基台40和160回到旋转对齐,于是基台40和160将再次互锁。对腱索施加额外张力也可使基台40和160旋转成旋转对齐。在一些情况下,基台40和160可通过使用促动器68使基台160旋转来旋转地对齐。基台160将相对于对应的基台40可滑动地旋转,直到它们的定位器特征对齐,于是基台40和160将嵌套和互锁。在一些情况下,可必要的是手动地使基台40和160重新对齐和重新承坐。
在一些实施例中,磁分离系统150不损害抓紧器20提升沉重物体的能力。因为腱索或缆沿轴向延伸通过基台40、160两者,并且基本上垂直于磁体166的面,所以腱索将基台40、160拉到一起。典型地,基台40和160将仅通过手指上的扭曲力来移去。
如上面提到和如图5中显示的,拇指90设有两个独立的腱索64A和66A,它们连接于对应的促动器64和66。腱索64A可看作是收缩筋腱,而腱索66A可看作是对抗肌腱。
腱索64A以与上面描述的相同的方式发送并且锚定于拇指90的远侧指骨120。腱索66A发送穿过外部滚道158、168,在铰接件特征42上面,并且通过螺钉43锚定于近侧指骨110的后侧。
除了能够按与上面关于使用腱索64A的手指70、80所描述的相同的方式运行,腱索64和66A可一起用来控制拇指90的远侧指骨120独立于其近侧指骨110的移动。更特别地,腱索66A可用来使近侧指骨110保持就位,从而使近侧指骨110有效地停止而不沿闭合方向F进一步旋转,同时促动器64拉动腱索64A。由于近侧指骨110保持就位,故远侧指骨120在挠曲接头JC处沿方向M独立地弯曲,而不使近侧指骨110沿闭合方向F同时枢转。腱索66A可延伸,以容许远侧指骨120沿方向N围绕挠曲接头JC有弹性地弯曲回。
根据一些实施例,腱索60A、62A、64A、66A能够传输范围为大约60 lbf至120 lbf的持续拉伸负载,在弯曲之后展现低能量存储,并且对于小于一毫米的弯曲半径为稳健的。
前述说明了本发明,并且不理解为限制本发明。虽然已经描述了本发明的几个示例性实施例,但本领域技术人员将容易地认识到,在实质上不偏离本发明的新颖教导和优点的情况下,许多修改在示例性实施例中是可行的。因此,所有此类修改都意于包括在本发明的范围内。因此,将理解的是,前述说明了本发明,并且不理解为限制于公开的特定实施例,并且对公开的实施例以及其它实施例的修改意于包括在本发明的范围内。
Claims (24)
1.一种顺从欠促动抓紧器,包括:
基部;
两个手指趾和与所述两个手指趾相对的拇指趾,其中所述手指趾和所述拇指趾均包括:
近侧指骨;
远侧指骨;
将所述近侧指骨直接连接于所述远侧指骨的远侧接头,所述远侧接头沿第一方向是顺从的;
将所述近侧指骨直接连接于所述基部的近侧接头,所述近侧接头沿第二方向是顺从的;以及
用于移动所述近侧和远侧指骨的腱索,其中,所述腱索基本上平行于顺从性的所述第一方向,并且基本上改变所述远侧接头沿所述第一方向的所述顺从性;以及
用以移动所述手指趾和所述拇指趾的至少一个促动器;
其中,各个远侧指骨具有为连接于其的所述近侧指骨的长度的0.60倍至0.66倍的长度;
其中,从所述两个手指趾中的各个的所述近侧接头到所述拇指的平均距离是所述两个手指趾的所述近侧指骨的平均长度的1.30倍至1.44倍;以及
其中,所述抓紧器具有少于自由度的促动器。
2.根据权利要求1所述的抓紧器,其特征在于:
所述基部包括在所述手指趾和所述拇指趾之间的手掌;并且
所述手掌具有主要尺寸,其范围为所述近侧指骨的所述平均长度的1.21倍至1.33倍。
3.根据权利要求1所述的抓紧器,其特征在于,所述手指趾的所述近侧接头之间的间距的范围为所述近侧指骨的所述平均长度的0.97倍至1.08倍。
4.一种顺从欠促动抓紧器,包括:
手掌基部;
第一和第二手指,其中所述第一和第二手指中的各个包括:
近侧指骨;
远侧指骨;
将所述远侧指骨连接于所述近侧指骨的顺从挠曲接头;以及
将所述近侧指骨连接于所述手掌基部的销接头,所述销接头约束所述近侧指骨相对于所述手掌基部的角移动,以围绕销枢转轴线旋转;以及
用以移动所述第一和第二手指的至少一个促动器;
其中,所述抓紧器具有少于自由度的促动器,并包括分别将所述第一和第二手指连接于所述手掌基部的第一和第二旋转接头,以使所述第一和第二手指能够相对于所述手掌基部旋转,其中所述第一和第二手指能够相对于所述手掌基部围绕所述第一和第二旋转接头旋转,以使它们的销枢转轴线相对于所述手掌基部重新定向,并且改变在所述第一手指的销枢转轴线与所述第二手指的销枢转轴线之间限定的角度。
5.根据权利要求4所述的抓紧器,其特征在于,所述抓紧器包括与所述第一和第二手指中的各个相关联的销接头角传感器。
6.根据权利要求4所述的抓紧器,其特征在于,所述抓紧器进一步包括:
拇指,包括:
近侧指骨;
远侧指骨;
将所述远侧指骨连接于所述近侧指骨的顺从挠曲接头;以及
将所述近侧指骨连接于所述手掌基部的销接头,所述销接头约束所述近侧指骨相对于所述手掌基部的角移动,以围绕销枢转轴线旋转;以及
用以独立于所述第一和第二手指来移动所述拇指的至少一个促动器。
7.根据权利要求4所述的抓紧器,其特征在于:
所述第一旋转接头使得所述第一手指能够围绕第一旋转轴线旋转;
所述第二旋转接头使得所述第二手指能够围绕第二旋转轴线旋转;并且
所述第一和第二旋转轴线是基本平行的。
8.根据权利要求4所述的抓紧器,其特征在于,所述抓紧器包括至少一个手指旋转促动器,其能够操作以强行地围绕所述第一和第二旋转接头旋转所述第一和第二手指。
9.根据权利要求4所述的抓紧器,其特征在于,所述第一和第二手指被连结,使得所述第一和第二手指围绕所述第一和第二旋转接头沿彼此相反的旋转方向一前一后地旋转。
10.根据权利要求4所述的抓紧器,其特征在于,所述抓紧器进一步包括:
拇指,其包括:
近侧指骨;
远侧指骨;
将所述远侧指骨连接于所述近侧指骨的顺从挠曲接头;以及
将所述近侧指骨连接于所述手掌基部的接头;以及
用以独立于所述第一和第二手指来移动所述拇指的至少一个促动器。
11.根据权利要求4所述的抓紧器,其特征在于,关于所述第一和第二手指中的各个:
所述近侧指骨被连接于所述手掌基部,以围绕所述枢转轴线沿第一方向和第二方向旋转;
所述抓紧器包括返回偏动弹簧,以沿所述第二方向将所述近侧指骨驱动至返回位置;
所述返回偏动弹簧具有第一弹簧速率;
所述挠曲接头构造成将所述远侧指骨偏置到相对于所述近侧指骨的打开位置,并且具有第二弹簧速率;并且
所述第二弹簧速率大于所述第一弹簧速率。
12.根据权利要求11所述的抓紧器,其特征在于:
还包括腱索,其用于移动所述近侧指骨和所述远侧指骨;
所述第一弹簧速率足以在所述腱索松驰的情况下在所述抓紧器的任何定向上将所述近侧指骨固持在所述返回位置;并且
所述第二弹簧速率足以在所述腱索松驰的情况下在所述抓紧器的任何定向上将所述远侧指骨固持在所述打开位置。
13.一种顺从欠促动抓紧器,包括:
手掌基部;
第一和第二手指,其中所述第一和第二手指中的各个包括:
近侧指骨;
远侧指骨;
将所述远侧指骨连接于所述近侧指骨的顺从挠曲接头;
销接头,其将所述近侧指骨连接于所述手掌基部,用于围绕销枢转轴线沿第一方向和第二方向旋转;以及
腱索,其用于移动所述近侧指骨和所述远侧指骨,使得所述腱索的移动生成所述近侧指骨以大于所述远侧指骨围绕所述挠曲接头的角运动的速率围绕所述销枢转轴线的角运动;以及
用以移动所述第一和第二手指的至少一个促动器;
其中,所述抓紧器具有少于自由度的促动器。
14.根据权利要求13所述的抓紧器,其特征在于,所述挠曲接头包括由顺从弹性体材料形成的挠曲连结件。
15.根据权利要求13所述的抓紧器,其特征在于,关于所述第一和第二手指中的各个:
所述抓紧器包括返回偏动弹簧,以沿所述第二方向将所述近侧指骨驱动至返回位置;
所述返回偏动弹簧具有第一弹簧速率;
所述挠曲接头构造成将所述远侧指骨偏置到相对于所述近侧指骨的打开位置,并且具有第二弹簧速率;并且
所述第二弹簧速率大于所述第一弹簧速率。
16.根据权利要求15所述的抓紧器,其特征在于,所述第二弹簧速率是所述第一弹簧速率的至少八倍。
17.根据权利要求15所述的抓紧器,其特征在于:
所述第一弹簧速率足以在所述腱索松驰的情况下在所述抓紧器的任何定向上将所述近侧指骨固持在所述返回位置;并且
所述第二弹簧速率足以在所述腱索松驰的情况下在所述抓紧器的任何定向上将所述远侧指骨固持在所述打开位置。
18.一种顺从欠促动抓紧器,包括:
手掌基部;
第一和第二手指,其中所述第一和第二手指中的各个包括:
近侧指骨;
远侧指骨;
将所述远侧指骨连接于所述近侧指骨的顺从挠曲接头;
枢转接头,其将所述近侧指骨连接于所述手掌基部,用于围绕所述枢转接头沿第一方向和第二方向旋转;
用于使所述近侧指骨沿所述第一方向移动的腱索;以及
用以沿所述第二方向将所述近侧指骨驱动到返回位置的返回偏动弹簧,其中,所述返回偏动弹簧的第一弹簧速率足以在所述腱索松驰的情况下在所述抓紧器的任何定向上将所述近侧指骨固持在所述返回位置;以及
与各个腱索相关联的至少一个促动器;
其中,所述抓紧器具有少于自由度的促动器,
其中,所述挠曲接头构造成将所述远侧指骨偏置到相对于所述近侧指骨的打开位置,并且具有大于所述第一弹簧速率的第二弹簧速率。
19.根据权利要求18所述的抓紧器,其特征在于,所述返回偏动弹簧包括扭转弹簧。
20.根据权利要求18所述的抓紧器,其特征在于,所述第二弹簧速率是所述第一弹簧速率的至少八倍。
21.一种顺从欠促动抓紧器,包括:
基部;
两个手指趾和与所述两个手指趾相对的拇指趾,其中所述手指趾和所述拇指趾均包括:
近侧指骨;
远侧指骨;
将所述近侧指骨直接连接于所述远侧指骨的远侧接头,所述远侧接头沿第一方向是顺从的;
将所述近侧指骨直接连接于所述基部的近侧接头,所述近侧接头沿第二方向是顺从的;以及
用于移动所述近侧和远侧指骨的腱索,其中,所述腱索基本上平行于顺从性的所述第一方向,并且基本上改变所述远侧接头沿所述第一方向的所述顺从性;以及
用以移动所述手指趾和拇指趾的至少一个促动器;
其中,所述拇指趾进一步包括第二腱索,所述第二腱索用于选择性地抑制其与所述腱索相对的所述近侧指骨,以使得所述远侧指骨能够独立于所述近侧指骨移动;并且
其中,所述抓紧器具有少于自由度的促动器。
22.根据权利要求21所述的抓紧器,其特征在于,所述抓紧器包括用以促动所述拇指趾的所述腱索的第一促动器和用以促动所述拇指趾的所述第二腱索的第二促动器。
23.根据权利要求21所述的抓紧器,其特征在于,各个手指趾不包括腱,所述腱用于选择性地抑制其与所述腱索相对的所述近侧指骨,以使得所述远侧指骨能够独立于所述近侧指骨移动。
24.根据权利要求21所述的抓紧器,其特征在于,所述腱索中的各个能够传输范围为60lbf至120 lbf的持续拉伸负载,在弯曲之后展现低能量存储,并且对于小于一毫米的弯曲半径为稳健的。
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261724506P | 2012-11-09 | 2012-11-09 | |
| US201261724517P | 2012-11-09 | 2012-11-09 | |
| US201261724512P | 2012-11-09 | 2012-11-09 | |
| US61/724506 | 2012-11-09 | ||
| US61/724512 | 2012-11-09 | ||
| US61/724517 | 2012-11-09 | ||
| US13/833580 | 2013-03-15 | ||
| US13/833,580 US9004559B2 (en) | 2012-11-09 | 2013-03-15 | Compliant underactuated grasper |
| US13/833687 | 2013-03-15 | ||
| US13/833,631 US8991885B2 (en) | 2012-11-09 | 2013-03-15 | Compliant underactuated grasper |
| US13/833,687 US9089977B2 (en) | 2012-11-09 | 2013-03-15 | Compliant underactuated grasper |
| US13/833631 | 2013-03-15 | ||
| CN201380058552.1A CN104936749B (zh) | 2012-11-09 | 2013-11-08 | 顺从欠促动抓紧器 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201380058552.1A Division CN104936749B (zh) | 2012-11-09 | 2013-11-08 | 顺从欠促动抓紧器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107756425A CN107756425A (zh) | 2018-03-06 |
| CN107756425B true CN107756425B (zh) | 2021-08-31 |
Family
ID=50685183
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710983311.8A Active CN107756425B (zh) | 2012-11-09 | 2013-11-08 | 顺从欠促动抓紧器 |
| CN201380058552.1A Active CN104936749B (zh) | 2012-11-09 | 2013-11-08 | 顺从欠促动抓紧器 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201380058552.1A Active CN104936749B (zh) | 2012-11-09 | 2013-11-08 | 顺从欠促动抓紧器 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2917002B1 (zh) |
| JP (2) | JP6484557B2 (zh) |
| CN (2) | CN107756425B (zh) |
| WO (1) | WO2014074840A1 (zh) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3016543A1 (fr) * | 2014-01-22 | 2015-07-24 | Aldebaran Robotics | Main destinee a equiper un robot a caractere humanoide a doigts ameliores |
| EP3307493A4 (en) * | 2015-06-11 | 2019-04-17 | Soft Robotics, Inc. | MODULAR ROBOTIC SYSTEMS |
| JP7155479B2 (ja) | 2017-05-15 | 2022-10-19 | Thk株式会社 | ハンド機構、把持システム、および把持プログラム |
| DE112018002496T5 (de) | 2017-05-15 | 2020-02-27 | Thk Co., Ltd. | Greifsystem |
| US20200171677A1 (en) | 2017-08-10 | 2020-06-04 | Thk Co., Ltd. | Hand mechanism and gripping system |
| JP7069512B2 (ja) * | 2017-11-15 | 2022-05-18 | Thk株式会社 | 把持システムおよびその制御方法 |
| WO2019102913A1 (ja) * | 2017-11-22 | 2019-05-31 | Thk株式会社 | 把持システム |
| JP6680757B2 (ja) | 2017-12-28 | 2020-04-15 | ファナック株式会社 | 把持用ハンド |
| KR102259379B1 (ko) * | 2018-01-24 | 2021-06-01 | 주식회사 엘지에너지솔루션 | 배터리 셀의 전극 이송 장치 |
| CN108673542B (zh) * | 2018-05-04 | 2021-04-27 | 江南大学 | 一种电-气复合驱动串联柔性铰链骨架柔性机械手 |
| US11537219B2 (en) | 2018-08-07 | 2022-12-27 | The Research Foundation For The State University Of New York | Feedback input apparatus and method for use thereof |
| JP6829738B2 (ja) | 2019-03-15 | 2021-02-10 | Thk株式会社 | 把持システムおよび把持方法 |
| DE202020001067U1 (de) * | 2020-03-18 | 2020-07-15 | ACCREA Engineering | Greifelement und Roboterarm oder Unterstützungshilfe oder Assistenzsystem |
| DE102020207035A1 (de) * | 2020-06-04 | 2021-12-09 | Kuka Deutschland Gmbh | Greiferfinger und Greifer mit solchen Greiferfingern |
| TWI736467B (zh) | 2020-11-11 | 2021-08-11 | 財團法人工業技術研究院 | 機械手掌及其手指裝置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5525986Y2 (zh) * | 1977-05-25 | 1980-06-23 | ||
| JPS5834787A (ja) * | 1981-08-25 | 1983-03-01 | 富士通フアナツク株式会社 | 工業用ロボツトのハンド |
| JP2001277174A (ja) * | 2000-03-30 | 2001-10-09 | Miyazaki Prefecture | 指関節機構及びそれを用いた把持ユニット |
| JP2004174625A (ja) * | 2002-11-25 | 2004-06-24 | Sony Corp | ロボット装置の手構造及びロボット装置並びに駆動装置及び駆動方法 |
| JP4313125B2 (ja) * | 2003-09-12 | 2009-08-12 | 本田技研工業株式会社 | ロボットハンド |
| GB0409548D0 (en) * | 2004-04-29 | 2004-06-02 | King S College London | Robotic hand |
| CN1330465C (zh) * | 2004-10-23 | 2007-08-08 | 江南大学 | 板弹簧骨架液气动式柔性弯曲关节 |
| JP2006159320A (ja) * | 2004-12-03 | 2006-06-22 | Sharp Corp | ロボットハンド |
| JP4355781B2 (ja) * | 2006-07-12 | 2009-11-04 | 国立大学法人東京工業大学 | 把持装置 |
| US8231158B2 (en) * | 2006-11-03 | 2012-07-31 | President And Fellows Of Harvard College | Robust compliant adaptive grasper and method of manufacturing same |
| JP4983245B2 (ja) * | 2006-12-21 | 2012-07-25 | 株式会社安川電機 | ロボットおよび制御方法 |
| JP4965413B2 (ja) * | 2007-11-26 | 2012-07-04 | トヨタ自動車株式会社 | ロボットハンド |
| CN101244563A (zh) * | 2008-02-23 | 2008-08-20 | 中国科学院合肥物质科学研究院 | 一种仿人手家庭服务用机器手 |
| US8534983B2 (en) * | 2008-03-17 | 2013-09-17 | Irobot Corporation | Door breaching robotic manipulator |
| JP5024227B2 (ja) * | 2008-08-07 | 2012-09-12 | トヨタ自動車株式会社 | ロボットハンド |
| CN101412220B (zh) * | 2008-11-28 | 2011-01-19 | 北京邮电大学 | 可伸缩机械手 |
| CN101844358B (zh) * | 2009-03-24 | 2011-07-27 | 中国科学院合肥物质科学研究院 | 变构型机械手爪的手指旋转移动装置及其工作方法 |
| KR20110005146A (ko) * | 2009-07-09 | 2011-01-17 | 한양대학교 산학협력단 | 로봇손 |
| CN201519961U (zh) * | 2009-09-09 | 2010-07-07 | 北京航空航天大学 | 多关节联动多指灵巧手 |
| CN102821918A (zh) * | 2010-03-24 | 2012-12-12 | 株式会社安川电机 | 机器人手和机器人装置 |
| EP3954512A3 (en) * | 2011-03-21 | 2022-03-02 | SRI International Inc. | Mobile robotic manipulator system |
| CN102357884A (zh) * | 2011-10-14 | 2012-02-22 | 清华大学 | 快速抓取欠驱动机器人手装置 |
-
2013
- 2013-11-08 CN CN201710983311.8A patent/CN107756425B/zh active Active
- 2013-11-08 WO PCT/US2013/069182 patent/WO2014074840A1/en active Application Filing
- 2013-11-08 EP EP13854112.3A patent/EP2917002B1/en active Active
- 2013-11-08 CN CN201380058552.1A patent/CN104936749B/zh active Active
- 2013-11-08 JP JP2015541930A patent/JP6484557B2/ja not_active Expired - Fee Related
-
2019
- 2019-02-15 JP JP2019025484A patent/JP6811267B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107756425A (zh) | 2018-03-06 |
| JP2015533669A (ja) | 2015-11-26 |
| EP2917002A4 (en) | 2016-09-21 |
| EP2917002A1 (en) | 2015-09-16 |
| JP2019107769A (ja) | 2019-07-04 |
| CN104936749B (zh) | 2017-11-17 |
| JP6811267B2 (ja) | 2021-01-13 |
| JP6484557B2 (ja) | 2019-03-13 |
| WO2014074840A1 (en) | 2014-05-15 |
| EP2917002B1 (en) | 2017-09-27 |
| CN104936749A (zh) | 2015-09-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107756425B (zh) | 顺从欠促动抓紧器 | |
| US9327412B2 (en) | Compliant underactuated grasper | |
| US9089977B2 (en) | Compliant underactuated grasper | |
| US8991885B2 (en) | Compliant underactuated grasper | |
| EP3265274B1 (en) | Compliant adaptive robot grasper | |
| Backus et al. | An adaptive three-fingered prismatic gripper with passive rotational joints | |
| US11679511B2 (en) | Robotic end effector with dorsally supported actuation mechanism | |
| JP2015533669A5 (zh) | ||
| US9814604B2 (en) | Gripping device | |
| US20090025502A1 (en) | Manipulator and robot | |
| US10709584B2 (en) | Adaptive robotic finger prosthesis for grasping arbitrary object shape | |
| JPH04501682A (ja) | クラッチ機構 | |
| JP2009291853A (ja) | ロボット用ハンド | |
| Dollar et al. | The SDM Hand: A highly adaptive compliant grasper for unstructured environments | |
| CN102814818B (zh) | 一种机器人用多指拟人手 | |
| JP2006000992A (ja) | ロボットハンド | |
| Odhner et al. | Simplifying robot hands using recursively scaled power grasps | |
| JP7341505B2 (ja) | ロボットハンド | |
| US11904457B2 (en) | Compliant gripper | |
| JP2023108531A (ja) | エンドエフェクタ | |
| JP2012066351A (ja) | ロボット用ハンドユニットおよびロボット | |
| O’Brien et al. | On the Development of a Low-Cost, Lightweight, Under-Actuated Prosthetic Gripper |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |