JP6842934B2 - 基板搬送装置、検出位置較正方法および基板処理装置 - Google Patents
基板搬送装置、検出位置較正方法および基板処理装置 Download PDFInfo
- Publication number
- JP6842934B2 JP6842934B2 JP2017012830A JP2017012830A JP6842934B2 JP 6842934 B2 JP6842934 B2 JP 6842934B2 JP 2017012830 A JP2017012830 A JP 2017012830A JP 2017012830 A JP2017012830 A JP 2017012830A JP 6842934 B2 JP6842934 B2 JP 6842934B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- unit
- detectors
- holding
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012546 transfer Methods 0.000 title claims description 196
- 238000001514 detection method Methods 0.000 title claims description 173
- 238000012545 processing Methods 0.000 title claims description 141
- 238000000034 method Methods 0.000 title claims description 31
- 239000000758 substrate Substances 0.000 claims description 525
- 238000013461 design Methods 0.000 claims description 67
- 238000004364 calculation method Methods 0.000 claims description 46
- 230000002093 peripheral effect Effects 0.000 claims description 43
- 238000003860 storage Methods 0.000 claims description 29
- 238000012937 correction Methods 0.000 claims description 22
- 230000008569 process Effects 0.000 claims description 10
- 230000032258 transport Effects 0.000 description 72
- 238000010438 heat treatment Methods 0.000 description 43
- 239000011248 coating agent Substances 0.000 description 39
- 238000000576 coating method Methods 0.000 description 39
- 238000001035 drying Methods 0.000 description 32
- 238000005406 washing Methods 0.000 description 23
- 238000001816 cooling Methods 0.000 description 20
- 239000013256 coordination polymer Substances 0.000 description 18
- 239000007788 liquid Substances 0.000 description 13
- 239000010408 film Substances 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 230000008859 change Effects 0.000 description 9
- 238000004140 cleaning Methods 0.000 description 9
- 230000000903 blocking effect Effects 0.000 description 7
- 238000005728 strengthening Methods 0.000 description 7
- 102100030373 HSPB1-associated protein 1 Human genes 0.000 description 6
- 101000843045 Homo sapiens HSPB1-associated protein 1 Proteins 0.000 description 6
- 238000011161 development Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000007723 transport mechanism Effects 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 3
- 239000013039 cover film Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000003139 buffering effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H01L21/67781—Batch transfer of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/681—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment using optical controlling means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/10—Measuring as part of the manufacturing process
- H01L22/12—Measuring as part of the manufacturing process for structural parameters, e.g. thickness, line width, refractive index, temperature, warp, bond strength, defects, optical inspection, electrical measurement of structural dimensions, metallurgic measurement of diffusions
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Description
(3)ずれ量は、第1の方向と交差する第2の方向における複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量を示す第2のオフセットをさらに含んでもよい。
この場合、第1および第2の方向における複数の検出器の設計位置と実際の位置とのずれ量が第1および第2のオフセットとして算出される。それにより、第1および第2の方向における基板の検出位置のずれが補正される。
図1(a),(b),(c)は第1の実施の形態に係る基板搬送装置500の平面図、側面図および正面図である。
図2は複数の検出器S1〜S6の位置関係を示す図である。図2において、図1(a)の回転部材520上でハンドH1,H2の進退方向に平行なY軸とハンドH1,H2の進退方向に直交するX軸とを有するXY座標系が定義される。ハンドH1,H2が進退初期位置にあるときのハンドH1,H2の基準位置をXY座標系の原点Oとする。設計上では、複数の検出器S1〜S6は、基準基板WRと同じ半径を有する円上に配置される。検出器S1〜S6の設計上の位置を設計位置と呼ぶ。検出器S1〜S6の設計位置の座標(以下、設計座標と呼ぶ。)をそれぞれ(X1,Y1)、(X2,Y2)、(X3,Y3)、(X4,Y4)、(X5,Y5)および(X6,Y6)とする。ハンドH1,H2に取り付けられる案内治具541,542に基準基板WRが当接すると、基準基板WRの中心は基準位置の座標(0,0)に一致する。この場合、ハンドH1,H2が進退初期位置から一定距離前進すると、検出器S1〜S6は基準基板WRの外周部上にそれぞれ位置する。
(x2,y2)=(X2,Y2+Yoff2)
(x3,y3)=(X3,Y3+Yoff3)
(x4,y4)=(X4,Y4+Yoff4)
(x5,y5)=(X5,Y5+Yoff5)
(x6,y6)=(X6,Y6+Yoff6)
検出器S1〜S6の設計座標(X1,Y1)〜(X6,Y6)は既知である。本例では、基準基板WRを保持するハンドH1を用いて検出器S1〜S6の実座標(x1,y1)〜(x6,y6)を算出するものとする。検出器S1〜S6の実座標(x1,y1)〜(x6,y6)は、例えば、基準基板WRを保持するハンドH1が進退初期位置から前進したときの検出器S1〜S6の検出信号および後述する上ハンドエンコーダ526の出力信号に基づいて算出される。具体的には、ハンドH1が進退初期位置から前進するときに検出器S1,S2の検出信号が入光状態から遮光状態に切り替わるタイミングに基づいて実座標(x1,y1),(x2,y2)を算出することができ、検出器S3〜S6の検出信号が遮光状態から入光状態に切り替わるタイミングに基づいて実座標(x3,y3)〜(x6,y6)を算出することができる。次に、検出器S1〜S6の実座標(x1,y1)〜(x6,y6)および設計座標(X1,Y1)〜(X6,Y6)を用いて上式よりオフセットYoff1〜Yoff6を算出することができる。
図4は基板搬送装置500の制御系の構成を示すブロック図である。図4に示すように、基板搬送装置500は、上下方向駆動モータ511、上下方向エンコーダ512、水平方向駆動モータ513、水平方向エンコーダ514、回転方向駆動モータ515、回転方向エンコーダ516、上ハンド進退用駆動モータ525、上ハンドエンコーダ526、下ハンド進退用駆動モータ527、下ハンドエンコーダ528、複数の検出器S1〜S6、搬送制御部550および操作部529を含む。
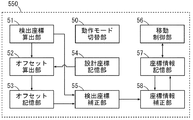
図5は搬送制御部550の機能的な構成を示すブロック図である。搬送制御部550は、動作モード切替部50、検出座標算出部51、オフセット算出部52、オフセット記憶部53、設計座標記憶部54、検出座標補正部55、移動制御部56、座標情報記憶部57および座標情報補正部58を含む。搬送制御部550は、CPU(中央演算処理装置)、RAM(ランダムアクセスメモリ)、ROM(リードオンリメモリ)および記憶装置により構成される。CPUがROMまたは記憶装置等の記憶媒体に記憶されたコンピュータプログラムを実行することにより、搬送制御部550の各構成要素の機能が実現される。なお、搬送制御部550の一部またはすべての構成要素が電子回路等のハードウエアにより実現されてもよい。
図6は基板搬送装置500の動作を示すフローチャートである。使用者は、図4の操作部529を用いて基板搬送装置500の動作モードを検出位置較正動作または基板搬送動作のいずれか一方に設定する。動作モードを検出位置較正動作に設定する場合には、使用者は、ハンドH1またはハンドH2に案内治具541,542を取り付けるとともに、ハンドH1またはハンドH2の基準位置に基準基板WRを載置する。以下、ハンドH1を用いた検出位置較正動作について説明する。
本実施の形態に係る基板搬送装置500においては、検出位置較正動作時に、基準基板WRを保持するハンドH1(またはハンドH2)が回転部材520に対して前進または後退する。このとき、複数の検出器S1〜S6の検出信号に基づいて複数の検出器S1〜S6の設計座標と複数の検出器S1〜S6の実座標とのずれ量がオフセットとして算出される。基板搬送動作時に、複数の検出器S1〜S6の検出座標がオフセットに基づいて補正される。それにより、ハンドH1(またはハンドH2)上の基板Wの位置が正確に検出される。また、検出座標に基づいて座標情報の載置座標が補正され、ハンドH1(またはハンドH2)により保持された基板Wが補正後の載置座標に基づいて搬送される。したがって、複数の検出器S1〜S6の設計位置と実位置との間にずれがある場合でも、基板Wを所定の位置に搬送することができる。その結果、基板Wの搬送精度の向上が可能となる。
第2の実施の形態に係る基板搬送装置500が第1の実施の形態に係る基板搬送装置500と異なるのは、検出位置較正動作において検出器S1〜S6のX軸方向のずれを補正する点である。第2の実施の形態に係る基板搬送装置500の全体の構成および搬送制御部550の構成は、図1、図4および図5に示す構成と同様である。
図8(b)に示すように、基準基板WRがハンドH1の右位置にある場合、X座標x3における検出器S3と基準基板WRの外周部とのずれ量をf2とする。この場合、検出器S3と同じX座標x3における基準基板WRの外周部のY座標は(y3−f2)となる。基準基板WRの外周部の座標(x3,y3−f2)は、基準基板WRの中心Cを中心とする半径Rの円上にある。基準基板WRの中心Cの座標は(Nx2,Ny2)であるため、次式が成立する。
ずれ量f1,f2は、ハンドH1を進退初期位置から前進するときに検出器S3の検出信号が遮光状態から入光状態に切り替わるタイミングに基づいて検出することができる。そのため、上式(1),(2)において、Nx1、Ny1、Nx2、Ny2、f1、f2およびRは既知である。したがって、上式(1),(2)の連立方程式の解を求めることにより、検出器S3の実座標(x3,y3)を算出することができる。同様にして、検出器S1,S2,S4〜S6の実座標(x1,y1),(x2,y2),(x4,y4)〜(x6,y6)を算出することができる。検出器S1〜S6の設計座標に対する実座標のずれ量のうちX軸方向のずれ量をオフセットXoff1〜Xoff6と呼び、Y軸方向のずれ量をオフセットYoff1〜Yoff6と呼ぶ。
(x2,y2)=(X2+Xoff2,Y2+Yoff2)
(x3,y3)=(X3+Xoff3,Y3+Yoff3)
(x4,y4)=(X4+Xoff4,Y4+Yoff4)
(x5,y5)=(X5+Xoff5,Y5+Yoff5)
(x6,y6)=(X6+Xoff6,Y6+Yoff6)
したがって、検出器S1〜S6の実座標(x1,y1)〜(x6,y6)と設計座標(X1,Y1)〜(X6,Y6)との差を算出することにより、X軸方向のオフセットXoff1〜Xoff6およびY軸方向のオフセットYoff1〜Yoff6を算出することができる。
本実施の形態に係る基板搬送装置500においては、複数の検出器S1〜S6の設計位置と実位置との間にX軸方向およびY軸方向のずれがある場合でも、X軸方向のオフセットXoff1〜Xoff6およびY軸方向のオフセットYoff1〜Yoff6に基づいてハンドH1,H2上の基板Wの位置を正確に検出することができる。それにより、基板Wを所定の位置に正確に搬送することができ、基板Wの搬送精度のさらなる向上が可能となる。
ハンドH1,H2の移動速度により検出器S1〜S6からの検出信号の出力タイミングと上ハンドエンコーダ526または下ハンドエンコーダ528からの信号の出力タイミングとの間の時間ずれが異なる。例えば、ハンドH1,H2の移動速度が高いほど時間ずれが長くなる。それにより、ハンドH1,H2の移動速度が異なると、算出されるオフセットが異なる。そこで、ハンドH1,H2の移動速度に依存して変化するオフセットが検出器S1〜S6の各々について予め記憶される。
図10は第1または第2の実施の形態に係る基板搬送装置を備えた基板処理装置の模式的平面図である。図10および図11以降の図面には、位置関係を明確にするために互いに直交するU方向、V方向およびW方向を示す矢印を付している。U方向およびV方向は水平面内で互いに直交し、W方向は鉛直方向に相当する。
(a)上記の実施の形態において、基板搬送装置500のハンドは、基板の裏面を吸着する機構の代わりに、基板の外周端部に当接することにより基板の外周端部を保持する機構を有してもよい。基板の外周端部を保持するハンドによれば、基板の外周端部との当接部分が磨耗することにより、基板が基準位置からずれた状態でハンドにより保持される可能性がある。この場合、本来載置されるべき位置からずれた位置に基板が載置される可能性がある。このような場合でも、検出位置較正動作により算出されたオフセットに基づいてハンドに保持された基板の位置を正確に検出することができる。その結果、本来載置されるべき位置に基板を正確に載置することが可能となる。
以下、請求項の各構成要素と実施の形態の各要素との対応の例について説明するが、本発明は下記の例に限定されない。
(13)参考形態
(13−1)参考形態に係る基板搬送装置は、基板を搬送する基板搬送装置であって、可動部と、可動部を移動させる第1の駆動部と、基板を保持するように構成された保持部と、保持部を可動部に対して第1の方向に移動させる第2の駆動部と、保持部により移動される基板の外周部の複数の部分をそれぞれ検出するように設けられた複数の検出器と、第1および第2の駆動部を制御する搬送制御部とを備え、搬送制御部は、検出位置較正動作時に、第2の駆動部により可動部に対して保持部を移動させるとともに複数の検出器の出力信号に基づいて複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量を算出するずれ量算出部と、基板搬送動作時に、複数の検出器の出力信号および前記ずれ量算出部により算出されたずれ量に基づいて保持部における基板の位置を検出する位置検出部と、基板搬送動作時に、位置検出部により検出された位置に基づいて第1および第2の駆動部を制御する移動制御部とを含む。
その基板搬送装置においては、検出位置較正動作時に、保持部が可動部に対して移動する。このとき、複数の検出器の出力信号に基づいて複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量が算出される。基板搬送動作時に、複数の検出器の出力信号および算出されたずれ量に基づいて基板の位置が検出される。それにより、複数の検出器の設計位置と実際の位置との間にずれがある場合でも、基板を所定の位置に搬送することができる。したがって、基板の搬送精度の向上が可能となる。
(13−2)ずれ量は、第1の方向における複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量を示す第1のオフセットを含んでもよい。
この場合、第1の方向における複数の検出器の設計位置と実際の位置とのずれ量が第1のオフセットとして算出される。それにより、第1の方向における基板の検出位置のずれが補正される。
(13−3)保持部は、予め定められた基準位置を有し、検出位置較正動作時に、基準基板を基準位置に保持するように構成され、ずれ量算出部は、検出位置較正動作時に、基準基板を基準位置で保持する保持部を移動させるとともに複数の検出器の出力信号に基づいて第1のオフセットを算出してもよい。この場合、第1のオフセットを容易に算出することができる。
(13−4)基板搬送装置は、検出位置較正動作時に、保持部に取り付け可能な当接部材をさらに備え、基準基板は、当接部材に当接することにより基準位置に位置決めされてもよい。この場合、基準基板を保持部の基準位置に容易に位置決めすることができる。
(13−5)ずれ量は、第1の方向と交差する第2の方向における複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量を示す第2のオフセットをさらに含んでもよい。
この場合、第1および第2の方向における複数の検出器の設計位置と実際の位置とのずれ量が第1および第2のオフセットとして算出される。それにより、第1および第2の方向における基板の検出位置のずれが補正される。
(13−6)保持部は、検出位置較正動作時に、基準基板を第2の方向において互いに異なる第1および第2の位置で保持するように構成され、ずれ量算出部は、検出位置較正動作時に、基準基板を第1の位置で保持する保持部を移動させ、基準基板を第2の位置で保持する保持部を移動させ、基準基板を第1の位置で保持する保持部の移動時における複数の検出器の出力信号と基準基板を第2の位置で保持する保持部の移動時における複数の検出器の出力信号とに基づいて、第1および第2のオフセットを算出してもよい。この場合、第1および第2のオフセットを容易に算出することができる。
(13−7)基板搬送装置は、検出位置較正動作時に、保持部に取り付け可能な第1および第2の当接部材をさらに備え、第1および第2の当接部材は、互いに異なるサイズを有し、第1および第2の当接部材が保持部の第1および第2の部分にそれぞれ取り付けられかつ基準基板が第1および第2の当接部材に当接することにより基準基板が第1の位置に位置決めされ、第1および第2の当接部材が保持部の第2および第1の部分にそれぞれ取り付けられかつ基準基板が第1および第2の当接部材に当接することにより基準基板が第2の位置に位置決めされてもよい。
この場合、基準基板を保持部の第1および第2の位置に容易に位置決めすることができる。
(13−8)ずれ量算出部は、検出位置較正動作時に、保持部の移動速度に依存するずれ量を算出してもよい。
この場合、保持部の移動速度による基板の検出位置のずれ量の変化を正確に補正することができる。
(13−9)搬送制御部は、保持部が基板を所定の位置に載置するように移動制御部を制御するための制御情報を記憶する記憶部と、基板搬送動作時に、保持部が基板を所定の位置に載置する前に、位置検出部により検出された位置に基づいて、保持部により載置されることになる基板の位置と所定の位置とのずれが相殺されるように制御情報を補正する制御情報補正部とをさらに含み、移動制御部は、補正された制御情報に基づいて第1および第2の駆動部を制御してもよい。
この場合、複数の検出器の設計位置と実際の位置とのずれに基づく基板の検出位置のずれを補正しつつ基板を所定の位置に載置することが可能となる。
(13−10)参考形態に係る検出位置較正方法は、基板搬送装置に設けられた複数の検出器により検出される基板の位置を較正する検出位置較正方法であって、基板搬送装置は、可動部と、可動部を移動させる第1の駆動部と、基板を保持するように構成された保持部と、保持部を可動部に対して第1の方向に移動させる第2の駆動部と、保持部により移動される基板の外周部の複数の部分をそれぞれ検出するように設けられた複数の検出器とを備え、検出位置較正方法は、検出位置較正動作時に、第2の駆動部により可動部に対して保持部を移動させるとともに複数の検出器の出力信号に基づいて複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量を算出するステップと、基板搬送動作時に、複数の検出器の出力信号および算出されたずれ量に基づいて保持部における基板の位置を検出するステップとを含む。
その検出位置較正方法によれば、検出位置較正動作時に、複数の検出器の設計位置と複数の検出器の実際の位置とのずれ量が算出される。基板搬送動作時に、複数の検出器の出力信号および算出されたずれ量に基づいて基板の位置が検出される。それにより、複数の検出器の設計位置と実際の位置との間にずれがある場合でも、基板を所定の位置に搬送することができる。したがって、基板の搬送精度の向上が可能となる。
(13−11)参考形態に係る基板処理装置は、基板に処理を行う基板処理装置であって、基板を支持する支持部を有し、支持部により支持された基板に処理を行うように構成された処理ユニットと、上記の基板搬送装置とを備え、基板搬送装置の移動制御部は、第1および第2の駆動部を制御することにより基板を処理ユニットの支持部の所定の位置に搬送する。
その基板処理装置によれば、複数の検出器の設計位置と実際の位置との間にずれがある場合でも、基板を処理ユニットの所定の位置に搬送することができる。したがって、基板の搬送精度の向上が可能となる。
Claims (11)
- 基板を搬送する基板搬送装置であって、
可動部と、
前記可動部を移動させる第1の駆動部と、
予め定められた基準位置を有し、検出位置較正動作時に基準基板を前記基準位置に保持し、基板搬送動作時に搬送されるべき基板を保持するように構成された保持部と、
前記検出位置較正動作時および前記基板搬送動作時に前記保持部を前記可動部に対して第1の方向に移動させる第2の駆動部と、
前記検出位置較正動作時に前記保持部により移動される前記基準基板の外周部の複数の部分をそれぞれ検出し、前記基板搬送動作時に前記保持部により移動される基板の外周部の複数の部分をそれぞれ検出するように設けられた複数の検出器と、
前記第1および第2の駆動部を制御する搬送制御部とを備え、
前記搬送制御部は、
前記検出位置較正動作時に、前記第2の駆動部により前記可動部に対して前記基準基板を前記基準位置に保持する前記保持部を移動させるとともに前記複数の検出器の出力信号に基づいて前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を算出するずれ量算出部と、
前記基板搬送動作時に、前記複数の検出器の出力信号および前記ずれ量算出部により算出されたずれ量に基づいて前記保持部における基板の位置を検出する位置検出部と、
前記位置検出部により検出された位置に基づいて前記第1および第2の駆動部を制御する移動制御部とを含む、基板搬送装置。 - 前記ずれ量は、前記第1の方向における前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を示す第1のオフセットを含む、請求項1記載の基板搬送装置。
- 前記ずれ量は、前記第1の方向と交差する第2の方向における前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を示す第2のオフセットをさらに含む、請求項2記載の基板搬送装置。
- 基板を搬送する基板搬送装置であって、
可動部と、
前記可動部を移動させる第1の駆動部と、
基板を保持するように構成された保持部と、
前記保持部を前記可動部に対して第1の方向に移動させる第2の駆動部と、
前記保持部により移動される基板の外周部の複数の部分をそれぞれ検出するように設けられた複数の検出器と、
前記第1および第2の駆動部を制御する搬送制御部とを備え、
前記搬送制御部は、
検出位置較正動作時に、前記第2の駆動部により前記可動部に対して前記保持部を移動させるとともに前記複数の検出器の出力信号に基づいて前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を算出するずれ量算出部と、
基板搬送動作時に、前記複数の検出器の出力信号および前記ずれ量算出部により算出されたずれ量に基づいて前記保持部における基板の位置を検出する位置検出部と、
前記位置検出部により検出された位置に基づいて前記第1および第2の駆動部を制御する移動制御部とを含み、
前記ずれ量は、前記第1の方向における前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を示す第1のオフセットを含み、
前記保持部は、予め定められた基準位置を有し、前記検出位置較正動作時に、基準基板を前記基準位置に保持するように構成され、
前記ずれ量算出部は、前記検出位置較正動作時に、前記基準基板を前記基準位置で保持する前記保持部を移動させるとともに前記複数の検出器の出力信号に基づいて前記第1のオフセットを算出する、基板搬送装置。 - 前記検出位置較正動作時に、前記保持部に取り付け可能な当接部材をさらに備え、
前記基準基板は、前記当接部材に当接することにより前記基準位置に位置決めされる、請求項1〜4のいずれか一項に記載の基板搬送装置。 - 基板を搬送する基板搬送装置であって、
可動部と、
前記可動部を移動させる第1の駆動部と、
基板を保持するように構成された保持部と、
前記保持部を前記可動部に対して第1の方向に移動させる第2の駆動部と、
前記保持部により移動される基板の外周部の複数の部分をそれぞれ検出するように設けられた複数の検出器と、
前記第1および第2の駆動部を制御する搬送制御部とを備え、
前記搬送制御部は、
検出位置較正動作時に、前記第2の駆動部により前記可動部に対して前記保持部を移動させるとともに前記複数の検出器の出力信号に基づいて前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を算出するずれ量算出部と、
基板搬送動作時に、前記複数の検出器の出力信号および前記ずれ量算出部により算出されたずれ量に基づいて前記保持部における基板の位置を検出する位置検出部と、
前記位置検出部により検出された位置に基づいて前記第1および第2の駆動部を制御する移動制御部とを含み、
前記ずれ量は、前記第1の方向における前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を示す第1のオフセットと、前記第1の方向と交差する第2の方向における前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を示す第2のオフセットとを含み、
前記保持部は、前記検出位置較正動作時に、基準基板を前記第2の方向において互いに異なる第1および第2の位置で保持するように構成され、
前記ずれ量算出部は、前記検出位置較正動作時に、前記基準基板を前記第1の位置で保持する前記保持部を移動させ、前記基準基板を前記第2の位置で保持する前記保持部を移動させ、前記基準基板を前記第1の位置で保持する前記保持部の移動時における前記複数の検出器の出力信号と前記基準基板を前記第2の位置で保持する前記保持部の移動時における前記複数の検出器の出力信号とに基づいて、前記第1および第2のオフセットを算出する、基板搬送装置。 - 前記検出位置較正動作時に、前記保持部に取り付け可能な第1および第2の当接部材をさらに備え、
前記第1および第2の当接部材は、互いに異なるサイズを有し、
前記第1および第2の当接部材が前記保持部の第1および第2の部分にそれぞれ取り付けられかつ前記基準基板が前記第1および第2の当接部材に当接することにより前記基準基板が前記第1の位置に位置決めされ、前記第1および第2の当接部材が前記保持部の前記第2および第1の部分にそれぞれ取り付けられかつ前記基準基板が前記第1および第2の当接部材に当接することにより前記基準基板が前記第2の位置に位置決めされる、請求項6記載の基板搬送装置。 - 前記ずれ量算出部は、前記検出位置較正動作時に、前記保持部の移動速度に依存するずれ量を算出する、請求項1〜7のいずれか一項に記載の基板搬送装置。
- 前記搬送制御部は、
前記保持部が基板を所定の位置に載置するように前記移動制御部を制御するための制御情報を記憶する記憶部と、
前記基板搬送動作時に、前記保持部が基板を前記所定の位置に載置する前に、前記位置検出部により検出された位置に基づいて、前記保持部により載置されることになる基板の位置と前記所定の位置とのずれが相殺されるように前記制御情報を補正する制御情報補正部とをさらに含み、
前記移動制御部は、前記補正された制御情報に基づいて前記第1および第2の駆動部を制御する、請求項1〜8のいずれか一項に記載の基板搬送装置。 - 基板搬送装置に設けられた複数の検出器により検出される基板の位置を較正する検出位置較正方法であって、
前記基板搬送装置は、
可動部と、
前記可動部を移動させる第1の駆動部と、
予め定められた基準位置を有し、検出位置較正動作時に基準基板を前記基準位置に保持し、基板搬送動作時に搬送されるべき基板を保持するように構成された保持部と、
前記検出位置較正動作時および前記基板搬送動作時に前記保持部を前記可動部に対して第1の方向に移動させる第2の駆動部と、
前記検出位置較正動作時に前記保持部により移動される前記基準基板の外周部の複数の部分をそれぞれ検出し、前記基板搬送動作時に前記保持部により移動される基板の外周部の複数の部分をそれぞれ検出するように設けられた複数の検出器とを備え、
前記検出位置較正方法は、
前記検出位置較正動作時に、前記第2の駆動部により前記可動部に対して前記基準基板を前記基準位置に保持する前記保持部を移動させるとともに前記複数の検出器の出力信号に基づいて前記複数の検出器の設計位置と前記複数の検出器の実際の位置とのずれ量を算出するステップと、
基板搬送動作時に、前記複数の検出器の出力信号および前記算出されたずれ量に基づいて前記保持部における基板の位置を検出するステップとを含む、検出位置較正方法。 - 基板に処理を行う基板処理装置であって、
基板を支持する支持部を有し、前記支持部により支持された基板に処理を行うように構成された処理ユニットと、
請求項1〜9のいずれか一項に記載の基板搬送装置とを備え、
前記基板搬送装置の前記移動制御部は、前記第1および第2の駆動部を制御することにより基板を前記処理ユニットの前記支持部の所定の位置に搬送する、基板処理装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017012830A JP6842934B2 (ja) | 2017-01-27 | 2017-01-27 | 基板搬送装置、検出位置較正方法および基板処理装置 |
| TW106142495A TWI679720B (zh) | 2017-01-27 | 2017-12-05 | 基板搬送裝置、檢測位置校正方法及基板處理裝置 |
| US15/843,279 US10395968B2 (en) | 2017-01-27 | 2017-12-15 | Substrate transport device, detection position calibration method and substrate processing apparatus |
| KR1020170182302A KR102045127B1 (ko) | 2017-01-27 | 2017-12-28 | 기판 반송 장치, 검출 위치 교정 방법 및 기판 처리 장치 |
| CN201711473933.2A CN108364898B (zh) | 2017-01-27 | 2017-12-29 | 基板搬送装置、检测位置校正方法及基板处理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017012830A JP6842934B2 (ja) | 2017-01-27 | 2017-01-27 | 基板搬送装置、検出位置較正方法および基板処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018121007A JP2018121007A (ja) | 2018-08-02 |
| JP2018121007A5 JP2018121007A5 (ja) | 2019-11-21 |
| JP6842934B2 true JP6842934B2 (ja) | 2021-03-17 |
Family
ID=62980202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017012830A Active JP6842934B2 (ja) | 2017-01-27 | 2017-01-27 | 基板搬送装置、検出位置較正方法および基板処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10395968B2 (ja) |
| JP (1) | JP6842934B2 (ja) |
| KR (1) | KR102045127B1 (ja) |
| CN (1) | CN108364898B (ja) |
| TW (1) | TWI679720B (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7008609B2 (ja) * | 2018-10-18 | 2022-01-25 | 東京エレクトロン株式会社 | 基板処理装置、及び搬送位置補正方法 |
| US10974388B2 (en) * | 2018-12-27 | 2021-04-13 | Kawasaki Jukogyo Kabushiki Kaisha | Method of correcting position of robot and robot |
| JP7107249B2 (ja) * | 2019-02-26 | 2022-07-27 | 株式会社ダイフク | 物品移載装置 |
| JP7303648B2 (ja) * | 2019-03-20 | 2023-07-05 | 株式会社Screenホールディングス | 基板処理装置および基板処理装置における対象物の搬送方法 |
| CN109924994B (zh) * | 2019-04-02 | 2023-03-14 | 晓智未来(成都)科技有限公司 | 一种x光拍摄过程中的检测位置自动校准方法及系统 |
| JP2021089963A (ja) * | 2019-12-04 | 2021-06-10 | キヤノン株式会社 | 搬送装置、露光装置及び物品の製造方法 |
| TWI821679B (zh) * | 2020-08-25 | 2023-11-11 | 南韓商杰宜斯科技有限公司 | 基板處理裝置及基板處理方法 |
| JP2022044512A (ja) * | 2020-09-07 | 2022-03-17 | 株式会社Screenホールディングス | 位置判定装置、基板搬送装置、位置判定方法および基板搬送方法 |
| JP2022076060A (ja) * | 2020-11-09 | 2022-05-19 | 日本電産サンキョー株式会社 | 産業用ロボットの教示方法 |
| JP7216752B2 (ja) * | 2021-02-08 | 2023-02-01 | キヤノントッキ株式会社 | 計測装置、インライン型蒸着装置および調整方法 |
| CN115132632A (zh) * | 2021-03-26 | 2022-09-30 | 深圳中科飞测科技股份有限公司 | 控制方法和检测装置 |
| CN115763337B (zh) * | 2023-01-10 | 2023-06-02 | 拉普拉斯(无锡)半导体科技有限公司 | 一种净化台放置舟的方法及其净化台 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20010032714A (ko) * | 1997-12-03 | 2001-04-25 | 오노 시게오 | 기판 반송방법 및 기판 반송장치, 이것을 구비한 노광장치및 이 노광장치를 이용한 디바이스 제조방법 |
| JP2000068359A (ja) * | 1998-08-24 | 2000-03-03 | Hitachi Techno Eng Co Ltd | ウエハ搬送装置 |
| JP2003273187A (ja) * | 2002-03-12 | 2003-09-26 | Matsushita Electric Ind Co Ltd | 薄板材の移載方法及び装置 |
| JP4956328B2 (ja) * | 2007-08-24 | 2012-06-20 | 東京エレクトロン株式会社 | 搬送アームの移動位置の調整方法及び位置検出用治具 |
| US8224607B2 (en) * | 2007-08-30 | 2012-07-17 | Applied Materials, Inc. | Method and apparatus for robot calibrations with a calibrating device |
| US7963736B2 (en) * | 2008-04-03 | 2011-06-21 | Asm Japan K.K. | Wafer processing apparatus with wafer alignment device |
| CN102046338B (zh) * | 2008-05-27 | 2014-05-07 | 日商乐华股份有限公司 | 输送装置、位置示教方法以及传感器夹具 |
| CN101640181A (zh) * | 2008-07-31 | 2010-02-03 | 佳能安内华股份有限公司 | 基底对准设备和基底处理设备 |
| JP5202462B2 (ja) * | 2009-07-23 | 2013-06-05 | 株式会社日立ハイテクノロジーズ | パターン欠陥検査装置および方法 |
| JP5614326B2 (ja) * | 2010-08-20 | 2014-10-29 | 東京エレクトロン株式会社 | 基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体 |
| JP2013045817A (ja) * | 2011-08-23 | 2013-03-04 | Hitachi High-Technologies Corp | 真空処理装置および真空処理方法 |
| JP5841389B2 (ja) * | 2011-09-29 | 2016-01-13 | 株式会社Screenセミコンダクターソリューションズ | 基板処理装置および基板処理方法 |
| JP5673577B2 (ja) * | 2012-02-07 | 2015-02-18 | 東京エレクトロン株式会社 | 基板処理装置、基板処理方法及び記憶媒体 |
| JP5990037B2 (ja) * | 2012-05-18 | 2016-09-07 | 東京応化工業株式会社 | 重ね合わせ装置および重ね合わせ方法 |
| JP6118044B2 (ja) | 2012-07-19 | 2017-04-19 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| US9196518B1 (en) * | 2013-03-15 | 2015-11-24 | Persimmon Technologies, Corp. | Adaptive placement system and method |
| JP2015005684A (ja) * | 2013-06-24 | 2015-01-08 | シンフォニアテクノロジー株式会社 | 搬送ロボット、円盤状搬送対象物の搬送方法 |
| JP6285275B2 (ja) | 2014-04-30 | 2018-02-28 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP6316082B2 (ja) * | 2014-04-30 | 2018-04-25 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP6422695B2 (ja) * | 2014-07-18 | 2018-11-14 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP6339909B2 (ja) * | 2014-09-17 | 2018-06-06 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP6328534B2 (ja) * | 2014-09-30 | 2018-05-23 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP6463227B2 (ja) * | 2015-07-07 | 2019-01-30 | 東京エレクトロン株式会社 | 基板搬送方法 |
-
2017
- 2017-01-27 JP JP2017012830A patent/JP6842934B2/ja active Active
- 2017-12-05 TW TW106142495A patent/TWI679720B/zh active
- 2017-12-15 US US15/843,279 patent/US10395968B2/en active Active
- 2017-12-28 KR KR1020170182302A patent/KR102045127B1/ko active IP Right Grant
- 2017-12-29 CN CN201711473933.2A patent/CN108364898B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018121007A (ja) | 2018-08-02 |
| KR102045127B1 (ko) | 2019-11-14 |
| US20180218935A1 (en) | 2018-08-02 |
| CN108364898B (zh) | 2022-02-01 |
| KR20180088576A (ko) | 2018-08-06 |
| TW201828391A (zh) | 2018-08-01 |
| US10395968B2 (en) | 2019-08-27 |
| TWI679720B (zh) | 2019-12-11 |
| CN108364898A (zh) | 2018-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6842934B2 (ja) | 基板搬送装置、検出位置較正方法および基板処理装置 | |
| JP6118044B2 (ja) | 基板処理装置および基板処理方法 | |
| JP6339909B2 (ja) | 基板処理装置および基板処理方法 | |
| JP6422695B2 (ja) | 基板処理装置および基板処理方法 | |
| JP6285275B2 (ja) | 基板処理装置および基板処理方法 | |
| JP6802726B2 (ja) | 基板搬送装置、それを備える基板処理装置および基板搬送方法 | |
| JP6923346B2 (ja) | 基板搬送装置、それを備える基板処理装置および基板搬送装置のティーチング方法 | |
| JP6316082B2 (ja) | 基板処理装置および基板処理方法 | |
| KR101798274B1 (ko) | 위치 맞춤 장치 및 기판 처리 장치 | |
| KR101972225B1 (ko) | 주연부 처리 장치 및 주연부 처리 방법 | |
| TWI676231B (zh) | 基板處理裝置、對位裝置、基板處理方法及對位方法 | |
| CN113073374A (zh) | 基板处理装置、以及基板处理方法 | |
| TWI744956B (zh) | 基板搬運裝置以及基板搬運裝置的手部的位置修正方法 | |
| TW202429612A (zh) | 基板搬送機器人系統 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191004 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6842934 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |