JP6774352B2 - トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 - Google Patents
トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 Download PDFInfo
- Publication number
- JP6774352B2 JP6774352B2 JP2017027688A JP2017027688A JP6774352B2 JP 6774352 B2 JP6774352 B2 JP 6774352B2 JP 2017027688 A JP2017027688 A JP 2017027688A JP 2017027688 A JP2017027688 A JP 2017027688A JP 6774352 B2 JP6774352 B2 JP 6774352B2
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- centrifuge
- torque
- torque fluctuation
- cam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H45/00—Combinations of fluid gearings for conveying rotary motion with couplings or clutches
- F16H45/02—Combinations of fluid gearings for conveying rotary motion with couplings or clutches with mechanical clutches for bridging a fluid gearing of the hydrokinetic type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/10—Suppression of vibrations in rotating systems by making use of members moving with the system
- F16F15/12—Suppression of vibrations in rotating systems by making use of members moving with the system using elastic members or friction-damping members, e.g. between a rotating shaft and a gyratory mass mounted thereon
- F16F15/131—Suppression of vibrations in rotating systems by making use of members moving with the system using elastic members or friction-damping members, e.g. between a rotating shaft and a gyratory mass mounted thereon the rotating system comprising two or more gyratory masses
- F16F15/133—Suppression of vibrations in rotating systems by making use of members moving with the system using elastic members or friction-damping members, e.g. between a rotating shaft and a gyratory mass mounted thereon the rotating system comprising two or more gyratory masses using springs as elastic members, e.g. metallic springs
- F16F15/134—Wound springs
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/10—Suppression of vibrations in rotating systems by making use of members moving with the system
- F16F15/14—Suppression of vibrations in rotating systems by making use of members moving with the system using masses freely rotating with the system, i.e. uninvolved in transmitting driveline torque, e.g. rotative dynamic dampers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/10—Suppression of vibrations in rotating systems by making use of members moving with the system
- F16F15/14—Suppression of vibrations in rotating systems by making use of members moving with the system using masses freely rotating with the system, i.e. uninvolved in transmitting driveline torque, e.g. rotative dynamic dampers
- F16F15/1407—Suppression of vibrations in rotating systems by making use of members moving with the system using masses freely rotating with the system, i.e. uninvolved in transmitting driveline torque, e.g. rotative dynamic dampers the rotation being limited with respect to the driving means
- F16F15/145—Masses mounted with play with respect to driving means thus enabling free movement over a limited range
- F16F15/1457—Systems with a single mass
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H45/00—Combinations of fluid gearings for conveying rotary motion with couplings or clutches
- F16H45/02—Combinations of fluid gearings for conveying rotary motion with couplings or clutches with mechanical clutches for bridging a fluid gearing of the hydrokinetic type
- F16H2045/0221—Combinations of fluid gearings for conveying rotary motion with couplings or clutches with mechanical clutches for bridging a fluid gearing of the hydrokinetic type with damping means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H45/00—Combinations of fluid gearings for conveying rotary motion with couplings or clutches
- F16H45/02—Combinations of fluid gearings for conveying rotary motion with couplings or clutches with mechanical clutches for bridging a fluid gearing of the hydrokinetic type
- F16H2045/0221—Combinations of fluid gearings for conveying rotary motion with couplings or clutches with mechanical clutches for bridging a fluid gearing of the hydrokinetic type with damping means
- F16H2045/0263—Combinations of fluid gearings for conveying rotary motion with couplings or clutches with mechanical clutches for bridging a fluid gearing of the hydrokinetic type with damping means the damper comprising a pendulum
Description
この場合は、規制軸と規制軸が衝突する部分との衝突が緩和され、衝突時の打音をさらに抑えることができる。
(5)好ましくは、回転体は、外周面に複数の凹部を有し、複数の遠心子のそれぞれは回転体の凹部に収容されている。そして、規制機構は、遠心子の内周面が凹部の底面に当接するのを規制する。
図1は、本発明の第1実施形態によるトルク変動抑制装置をトルクコンバータのロックアップ装置に装着した場合の模式図である。図1において、O−Oがトルクコンバータの回転軸線である。
トルクコンバータ1は、フロントカバー2と、トルクコンバータ本体3と、ロックアップ装置4と、出力ハブ5と、を有している。フロントカバー2にはエンジンからトルクが入力される。トルクコンバータ本体3は、フロントカバー2に連結されたインペラ7と、タービン8と、ステータ(図示せず)と、を有している。タービン8は出力ハブ5に連結されており、出力ハブ5の内周部には、トランスミッションの入力軸(図示せず)がスプラインによって係合可能である。
ロックアップ装置4は、クラッチ部や、油圧によって作動するピストン等を有し、ロックアップオン状態と、ロックアップオフ状態と、を取り得る。ロックアップオン状態では、フロントカバー2に入力されたトルクは、トルクコンバータ本体3を介さずに、ロックアップ装置4を介して出力ハブ5に伝達される。一方、ロックアップオフ状態では、フロントカバー2に入力されたトルクは、トルクコンバータ本体3を介して出力ハブ5に伝達される。
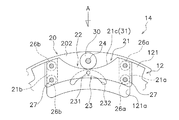
図2は、ハブフランジ12及びトルク変動抑制装置14の正面図である。なお、図2は一方(手前側)のイナーシャリングを取り外して示している。図3は図2のA方向から視た図、図4は図2の外観斜視図である。図2以降の図ではハブフランジ12及びトルク変動抑制装置14の一部を示しているが、全体としては、円周方向の4ヶ所に、各図に示した部分が等角度間隔で設けられている。
第1及び第2イナーシャリング201,202は、それぞれ連続した円環状に形成された所定の厚みを有するプレートであり、図3に示すように、ハブフランジ12を挟んでハブフランジ12の軸方向両側に所定の隙間をあけて配置されている。すなわち、ハブフランジ12と第1及び第2イナーシャリング201,202とは、軸方向に並べて配置されている。第1及び第2イナーシャリング201,202は、ハブフランジ12の回転軸と同じ回転軸を有し、ハブフランジ12とともに回転可能で、かつハブフランジ12に対して相対回転自在である。
ハブフランジ12は、円板状に形成され、内周部が前述のように出力ハブ5に連結されている。ハブフランジ12の外周部には、外周側にさらに突出し、円周方向に所定の幅を有する4つの突起部121が形成されている。突起部121の円周方向の中央部には、所定の幅の凹部121aが形成されている。凹部121aは、外周側に開くように形成され、所定の深さを有している。
遠心子21は、ハブフランジ12の凹部121aに配置されており、ハブフランジ12の回転による遠心力によって径方向に移動可能である。遠心子21は、円周方向に延びて形成され、円周方向の両端に溝21a,21bを有している。溝21a,21bの幅は、ハブフランジ12の厚みより大きく、溝21a,21bの一部にハブフランジ12が挿入されている。
カム機構22は、カムフォロアとしての円筒状のコロ30と、遠心子21の外周面21cであるカム31と、から構成されている。コロ30は、リベット24の胴部の外周に嵌めこまれている。すなわち、コロ30はリベット24に支持されている。なお、コロ30は、リベット24に対して回転自在に装着されているのが好ましいが、回転不能であってもよい。カム31は、コロ30が当接する円弧状の面であり、ハブフランジ12と第1及び第2イナーシャリング201,202とが所定の角度範囲で相対回転した際には、コロ30はこのカム31に沿って移動する。
規制機構23は、カム機構22による遠心子21の作動を許容し、かつ遠心子21の径方向の移動を規制する。規制機構23は、ピン(規制軸)231と、溝(規制溝)232と、を有している。
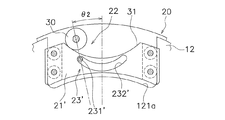
図2、図5及び図6を用いて、カム機構22の作動(トルク変動の抑制)について説明する。なお、以下の説明では、第1及び第2イナーシャリング201,202を、単に「イナーシャリング20」と記す場合もある。
図7は、トルク変動抑制特性の一例を示す図である。横軸は回転数、縦軸はトルク変動(回転速度変動)である。特性Q1はトルク変動を抑制するための装置が設けられていない場合、特性Q2は従来のダイナミックダンパ装置が設けられた場合、特性Q3は本実施形態のトルク変動抑制装置14が設けられた場合を示している。
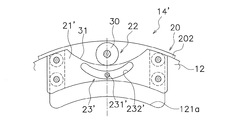
図8〜図10は本発明の第2実施形態によるトルク変動抑制装置の一部を示しており、第1実施形態の図2、図5及び図6に相当する図である。なお、これらの図は、一方(各図における手前側)のイナーシャリング201を取り外して示している。
図11は第3実施形態によるトルク変動抑制装置の一部を示しており、第1実施形態の図2及び第2実施形態の図8に相当する図である。この第3実施形態では、規制機構の構成のみが第2実施形態と異なる。すなわち、第3実施形態の規制機構23’’は、ピン231’と遠心子21’’の内周面に形成された規制面232’’とから構成されている。ピン231’は第2実施形態と同様である。規制面232’’は、遠心子21’’の内周面であり、この規制面232’’がピン231’に当接している。規制面232’’は、内周側に凸の円弧状に形成されている。
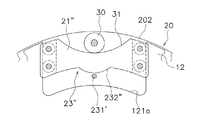
図12は第4実施形態によるトルク変動抑制装置の一部を示しており、第1実施形態の図2に相当する図である。この第4実施形態では、規制機構の構成のみが第1実施形態と異なる。すなわち、第4実施形態では、ピン231の外周面には弾性体233が設けられている。
図13に第5実施形態によるトルク変動抑制装置の一部を示しており、第1実施形態の図2に相当する図である。この第5実施形態では、規制機構の構成のみが第1実施形態と異なる。すなわち、第5実施形態の規制機構23’’’は、ローラ26a,26bを支持するピン(規制軸)27’と、第1及び第2イナーシャリング201,202に形成された溝(規制溝)232’’’と、を有している。
本発明は以上のような実施形態に限定されるものではなく、本発明の範囲を逸脱することなく種々の変形又は修正が可能である。
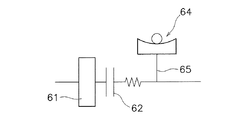
以上のようなトルク変動抑制装置を、トルクコンバータや他の動力伝達装置に適用する場合、種々の配置が可能である。以下に、トルクコンバータや他の動力伝達装置の模式図を利用して、具体的な適用例について説明する。
11 入力側回転体
12 ハブフランジ(回転体)
121a 凹部
14,14’ トルク変動抑制装置
20,201,202 イナーシャリング(質量体)
21,21’,21’’ 遠心子
22 カム機構
23、23’,23’’,23’’’ 規制機構
231,231’ ピン(規制軸)
232,232’,232’’’ 溝(規制溝)
232’’ 規制面
30 コロ(カムフォロア)
31 カム
Claims (8)
- トルクが入力される回転体のトルク変動を抑制するトルク変動抑制装置であって、
前記回転体とともに回転可能であり、かつ前記回転体に対して相対回転自在に配置された質量体と、
前記回転体及び前記質量体の回転による遠心力を受けるように配置された複数の遠心子と、
前記遠心子に作用する遠心力を受けて、前記回転体と前記質量体との間に回転方向における相対変位が生じたときには、前記遠心力を、前記相対変位が小さくなる方向の円周方向力に変換する複数のカム機構と、
前記カム機構による前記遠心子の作動を許容し、かつ前記遠心子の径方向の移動を規制する複数の規制機構と、
備え、
前記回転体は、外周面に複数の凹部を有し、
複数の前記遠心子のそれぞれは、前記回転体の凹部に収容されており、
前記規制機構は、前記遠心子の内周面が前記凹部の底面に当接するのを規制する、
トルク変動抑制装置。
- 前記規制機構は、
前記質量体及び前記遠心子の一方に設けられ、前記回転体の回転軸に沿って延びる規制軸と、
前記質量体及び前記遠心子の他方に形成され、前記規制軸が挿入された規制溝と、
を有する、
請求項1に記載のトルク変動抑制装置。
- トルクが入力される回転体のトルク変動を抑制するトルク変動抑制装置であって、
前記回転体とともに回転可能であり、かつ前記回転体に対して相対回転自在に配置された質量体と、
前記回転体及び前記質量体の回転による遠心力を受けるように配置された複数の遠心子と、
前記遠心子に作用する遠心力を受けて、前記回転体と前記質量体との間に回転方向における相対変位が生じたときには、前記遠心力を、前記相対変位が小さくなる方向の円周方向力に変換する複数のカム機構と、
前記カム機構による前記遠心子の作動を許容し、かつ前記遠心子の径方向の移動を規制する複数の規制機構と、
備え、
前記規制機構は、
前記質量体に設けられ、前記回転体の回転軸に沿って延びる規制軸と、
前記遠心子の内周面に形成され、前記規制軸が摺動する規制面と、
を有する、
トルク変動抑制装置。
- 前記規制軸の外周面又は前記規制軸が当接する面に設けられた弾性体をさらに備えた、請求項2又は3に記載のトルク変動抑制装置。
- 前記カム機構は、
前記質量体及び前記遠心子の一方に設けられたカムと、
前記質量体及び前記遠心子の他方に設けられ前記カムに沿って移動するカムフォロアと、を有する、
請求項1から4のいずれかに記載のトルク変動抑制装置。
- 前記質量体は、前記回転体を挟んで対向して配置された第1イナーシャリング及び第2イナーシャリングと、前記第1イナーシャリングと前記第2イナーシャリングとを相対回転不能に連結するリベットと、を有し、
前記遠心子は、前記回転体の外周部でかつ前記リベットの内周側において前記第1イナーシャリングと前記第2イナーシャリングとの軸方向間に配置されており、
前記カムフォロアは、内部に前記リベットが軸方向に貫通する孔を有する円筒状のコロであり、
前記カムは、前記遠心子に形成されて前記カムフォロアに当接し、前記回転体と前記質量体との間の回転方向における相対変位量に応じて前記円周方向力が変化するような形状を有する、
請求項5に記載のトルク変動抑制装置。
- エンジンとトランスミッションとの間に配置されるトルクコンバータであって、
前記エンジンからのトルクが入力される入力側回転体と、
前記トランスミッションにトルクを出力する出力側回転体と、
前記入力側回転体と前記出力側回転体との間に配置されたダンパと、
請求項1から6のいずれかに記載のトルク変動抑制装置と、
を備えたトルクコンバータ。
- 回転軸を中心に回転する第1慣性体と、前記回転軸を中心に回転し前記第1慣性体と相対回転自在な第2慣性体と、前記第1慣性体と前記第2慣性体との間に配置されたダンパと、を有するフライホイールと、
前記フライホイールの前記第2慣性体に設けられたクラッチ装置と、
請求項1から6のいずれかに記載のトルク変動抑制装置と、
を備えた動力伝達装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017027688A JP6774352B2 (ja) | 2017-02-17 | 2017-02-17 | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 |
| US16/473,618 US11156277B2 (en) | 2017-02-17 | 2018-01-15 | Torque fluctuation inhibiting device, torque converter and power transmission device |
| PCT/JP2018/000754 WO2018150777A1 (ja) | 2017-02-17 | 2018-01-15 | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 |
| CN201880012220.2A CN110300862B (zh) | 2017-02-17 | 2018-01-15 | 转矩变动抑制装置、变矩器以及动力传递装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017027688A JP6774352B2 (ja) | 2017-02-17 | 2017-02-17 | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018132160A JP2018132160A (ja) | 2018-08-23 |
| JP2018132160A5 JP2018132160A5 (ja) | 2019-06-27 |
| JP6774352B2 true JP6774352B2 (ja) | 2020-10-21 |
Family
ID=63170550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017027688A Active JP6774352B2 (ja) | 2017-02-17 | 2017-02-17 | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11156277B2 (ja) |
| JP (1) | JP6774352B2 (ja) |
| CN (1) | CN110300862B (ja) |
| WO (1) | WO2018150777A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7047683B2 (ja) * | 2018-09-14 | 2022-04-05 | トヨタ自動車株式会社 | 捩り振動低減装置 |
| JP7087947B2 (ja) * | 2018-11-20 | 2022-06-21 | 株式会社アイシン | 振動減衰装置およびその設計方法 |
| JP7208826B2 (ja) * | 2019-02-25 | 2023-01-19 | 株式会社エクセディ | 回転装置 |
| JP7218221B2 (ja) * | 2019-03-13 | 2023-02-06 | 株式会社エクセディ | トルク変動抑制装置、及びトルクコンバータ |
| JP7263066B2 (ja) | 2019-03-13 | 2023-04-24 | 株式会社エクセディ | トルク変動抑制装置、及びトルクコンバータ |
| JP2021071190A (ja) * | 2019-11-01 | 2021-05-06 | 株式会社エクセディ | トルク変動抑制装置及び動力伝達装置 |
| US11927254B2 (en) * | 2020-07-07 | 2024-03-12 | Exedy Corporation | Rotary device and power transmission device |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH062048Y2 (ja) * | 1987-02-23 | 1994-01-19 | トヨタ自動車株式会社 | ト−シヨナルダンパ付フライホイ−ル |
| US4947706A (en) | 1986-09-05 | 1990-08-14 | Toyota Jidosha Kabushiki Kaisha | Flywheel with a torsional damper |
| JP2010071341A (ja) * | 2008-09-17 | 2010-04-02 | Toyota Motor Corp | 振子式動吸振装置 |
| JP5571513B2 (ja) * | 2010-09-16 | 2014-08-13 | アイシン・エィ・ダブリュ工業株式会社 | 動吸振器 |
| FR2989753B1 (fr) * | 2012-04-20 | 2014-04-18 | Valeo Embrayages | Dispositif d'amortissement pendulaire, en particulier pour une transmission de vehicule automobile |
| CN104685259B (zh) * | 2012-07-06 | 2016-08-24 | 舍弗勒技术股份两合公司 | 离心力摆 |
| JP5912955B2 (ja) * | 2012-07-18 | 2016-04-27 | アイシン・エィ・ダブリュ工業株式会社 | 回転体の振動低減装置 |
| JP5924279B2 (ja) * | 2013-01-29 | 2016-05-25 | トヨタ自動車株式会社 | 捩り振動減衰装置 |
| DE102013213373A1 (de) | 2013-07-09 | 2015-01-15 | Zf Friedrichshafen Ag | Tilgerschwingungsdämpfer |
| JP6248856B2 (ja) * | 2013-08-09 | 2017-12-20 | アイシン・エィ・ダブリュ株式会社 | 遠心振子式吸振装置 |
| CN105378335B (zh) | 2013-08-09 | 2017-02-01 | 爱信艾达株式会社 | 离心振子式吸振装置 |
| JP6230874B2 (ja) * | 2013-10-25 | 2017-11-15 | 株式会社エクセディ | ダイナミックダンパ装置及びトルクコンバータのロックアップ装置 |
| JP6182434B2 (ja) | 2013-11-12 | 2017-08-16 | 株式会社エクセディ | トルクコンバータのロックアップ装置 |
| FR3014982B1 (fr) | 2013-12-16 | 2016-03-11 | Valeo Embrayages | Dispositif d'amortissement pendulaire |
| JP2021071190A (ja) * | 2019-11-01 | 2021-05-06 | 株式会社エクセディ | トルク変動抑制装置及び動力伝達装置 |
-
2017
- 2017-02-17 JP JP2017027688A patent/JP6774352B2/ja active Active
-
2018
- 2018-01-15 US US16/473,618 patent/US11156277B2/en active Active
- 2018-01-15 CN CN201880012220.2A patent/CN110300862B/zh active Active
- 2018-01-15 WO PCT/JP2018/000754 patent/WO2018150777A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018150777A1 (ja) | 2018-08-23 |
| CN110300862A (zh) | 2019-10-01 |
| US20190323576A1 (en) | 2019-10-24 |
| JP2018132160A (ja) | 2018-08-23 |
| US11156277B2 (en) | 2021-10-26 |
| CN110300862B (zh) | 2021-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6774352B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6534589B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| KR102520861B1 (ko) | 토크 변동 억제 장치, 토크 컨버터 및 동력 전달 장치 | |
| JP6709765B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6757680B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6657041B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6653538B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP2019039456A5 (ja) | ||
| JP6712586B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP2019039456A (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| WO2018150660A1 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP7208826B2 (ja) | 回転装置 | |
| WO2018016212A1 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6764430B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP7300284B2 (ja) | トルク変動抑制装置、及びトルクコンバータ | |
| JP6539180B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP7263066B2 (ja) | トルク変動抑制装置、及びトルクコンバータ | |
| JP2020133814A (ja) | 回転装置 | |
| JP7218221B2 (ja) | トルク変動抑制装置、及びトルクコンバータ | |
| JP6709764B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6709767B2 (ja) | トルク変動抑制装置、トルクコンバータ、及び動力伝達装置 | |
| JP6709770B2 (ja) | トルク変動抑制装置及びトルクコンバータ | |
| JP2021042840A (ja) | トルク変動抑制装置、及び動力伝達装置 | |
| JP7232667B2 (ja) | トルク変動抑制装置 | |
| JP6682572B2 (ja) | トルク変動抑制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200908 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201002 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6774352 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |