JP6764945B2 - 車両の運転および自動運転を簡易化する方法 - Google Patents
車両の運転および自動運転を簡易化する方法 Download PDFInfo
- Publication number
- JP6764945B2 JP6764945B2 JP2018559805A JP2018559805A JP6764945B2 JP 6764945 B2 JP6764945 B2 JP 6764945B2 JP 2018559805 A JP2018559805 A JP 2018559805A JP 2018559805 A JP2018559805 A JP 2018559805A JP 6764945 B2 JP6764945 B2 JP 6764945B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- track
- candidate
- world
- given
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 178
- 230000007704 transition Effects 0.000 claims description 27
- 230000009471 action Effects 0.000 claims description 13
- 230000007613 environmental effect Effects 0.000 claims description 13
- 230000004044 response Effects 0.000 claims description 11
- 230000014509 gene expression Effects 0.000 claims description 10
- 230000003993 interaction Effects 0.000 claims 2
- 230000008569 process Effects 0.000 description 108
- 230000006399 behavior Effects 0.000 description 24
- 230000001133 acceleration Effects 0.000 description 21
- 230000033001 locomotion Effects 0.000 description 20
- 230000006870 function Effects 0.000 description 17
- 238000004891 communication Methods 0.000 description 16
- 238000001514 detection method Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 13
- 238000004458 analytical method Methods 0.000 description 12
- 238000012544 monitoring process Methods 0.000 description 12
- 238000004422 calculation algorithm Methods 0.000 description 11
- 238000012854 evaluation process Methods 0.000 description 11
- 238000004590 computer program Methods 0.000 description 8
- 238000013439 planning Methods 0.000 description 7
- 239000000446 fuel Substances 0.000 description 5
- 230000005055 memory storage Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000003068 static effect Effects 0.000 description 5
- 230000002123 temporal effect Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 239000003795 chemical substances by application Substances 0.000 description 4
- 230000036461 convulsion Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000001105 regulatory effect Effects 0.000 description 4
- 238000011160 research Methods 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 3
- 238000013507 mapping Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 230000002776 aggregation Effects 0.000 description 2
- 238000004220 aggregation Methods 0.000 description 2
- 230000004807 localization Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 238000007476 Maximum Likelihood Methods 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 241000276498 Pollachius virens Species 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 238000003339 best practice Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000019771 cognition Effects 0.000 description 1
- 230000001149 cognitive effect Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000007717 exclusion Effects 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 230000008921 facial expression Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012913 prioritisation Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0016—Planning or execution of driving tasks specially adapted for safety of the vehicle or its occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
- B60W60/00276—Planning or execution of driving tasks using trajectory prediction for other traffic participants for two or more other traffic participants
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
- G09B19/16—Control of vehicles or other craft
- G09B19/167—Control of land vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0013—Optimal controllers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/54—Audio sensitive means, e.g. ultrasound
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/50—Barriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4026—Cycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/60—Traversable objects, e.g. speed bumps or curbs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2756/00—Output or target parameters relating to data
- B60W2756/10—Involving external transmission of data to or from the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0251—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting 3D information from a plurality of images taken from different locations, e.g. stereo vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0285—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using signals transmitted via a public communication network, e.g. GSM network
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Business, Economics & Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Theoretical Computer Science (AREA)
- Educational Technology (AREA)
- Educational Administration (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Electromagnetism (AREA)
- Control Of Transmission Device (AREA)
Description
人による車両の典型的な運転、および技術を用いた車両の自動運転は、機会とリスクを提示する。危険の多くは、車両の状態ならびに他の車両および障害物を含む環境の状態を考慮して車両がどのように運転されるかということと関連付けられる。
一般に、一局面では、車両の制御に関連した操作は、以下を含む動作によって簡易化される。所与の時点での車両の位置を起点とする車両の候補軌道の有限集合が生成される。候補軌道は、車両の状態と、車両の位置および所与の時点での車両の可能な挙動および環境の可能な挙動とに基づく。候補軌道と関連付けられたコストに基づいて候補軌道の中から推定上の最適軌道が選択される。コストは、車両の動作規則の違反と関連付けられるコストを含む。選択された推定上の最適軌道は、車両の制御に関連した操作を簡易化にするために使用される。
以下を含む動作によって車両の制御に関連した操作を簡易化することを含む方法:
所与の時点での車両の位置を起点とする前記車両の候補軌道の有限集合を生成することであって、前記候補軌道が、前記車両の状態と、前記車両の前記位置および前記所与の時点での前記車両の可能な挙動および環境の可能な挙動とに基づく、こと、
前記車両の動作規則の違反と関連付けられたコストを含む、前記候補軌道と関連付けられたコストに基づいて、前記候補軌道の中から推定上の最適軌道を選択すること、ならびに
前記車両の制御に関連した操作を簡易化するために、前記選択された推定上の最適軌道を使用すること。
[本発明1002]
前記車両の制御に関連した操作を簡易化することが、前記推定上の最適軌道と関連付けられたフィードバック制御ポリシーを、前記車両の制御要素に適用することを含む、本発明1001の方法。
[本発明1003]
前記候補軌道の有限集合に1つまたは複数の制約を適用することを含む、本発明1001の方法。
[本発明1004]
1つまたは複数の制約を適用することが、前記有限集合の前記候補軌道の各々にラベルを帰属させることを含み、前記ラベルの各々が、前記候補軌道に基づく前記車両の特性を表す論理述語を含む、本発明1003の方法。
[本発明1005]
推定上の最適軌道を選択することが、有向グラフを通る最小コストパスを決定することを含み、前記候補軌道が前記有向グラフのエッジを含む、本発明1001の方法。
[本発明1006]
車両の候補軌道の有限集合を生成することが、前記車両の前記位置および前記所与の時点での所与の制御ポリシーに対する前記車両の予期される応答を表すモデルを適用することを含む、本発明1001の方法。
[本発明1007]
前記コストが、形式言語のコスト規則として表現されている、本発明1001の方法。
[本発明1008]
前記車両の実際の軌道を所与の期間にわたって監視することを含む、本発明1001の方法。
[本発明1009]
前記所与の期間にわたって、前記車両の前記実際の軌道を前記推定上の最適軌道と比較することを含む、本発明1008の方法。
[本発明1010]
前記車両の制御に関連した操作を簡易化することが、運転者のパフォーマンスを監視することを含む、本発明1001の方法。
[本発明1011]
1つまたは複数のパフォーマンスメトリックに基づいて前記運転者のパフォーマンスを評価することを含む、本発明1010の方法。
[本発明1012]
前記運転者のパフォーマンスに関連した情報を車載ディスプレイに表示することを含む、本発明1010の方法。
[本発明1013]
前記運転者のパフォーマンスに関連した情報を、前記車両から離れた受信機に無線で送信することを含む、本発明1010の方法。
[本発明1014]
前記車両の制御に関連した操作を簡易化することが、前記車両を自律的に走行させることを含む、本発明1001の方法。
[本発明1015]
前記車両の前記動作規則が、前記車両の運転者に適用される交通規則を含む、本発明1001の方法。
[本発明1016]
以下を含む動作によって車両の制御に関連した操作を簡易化することを含む方法:
所与の時点での車両の候補軌道の有限集合を生成することであって、前記候補軌道の有限集合が、前記車両のすべての可能な軌道の軌道空間に属する、こと、
前記候補軌道の各々を制約に照らして評価すること、
前記候補軌道と関連付けられたコストに基づいて、前記有限集合の前記候補軌道の中から推定上の最適軌道を選択することであって、推定上の最適戦略が最適戦略に任意に近いように、前記車両のすべての可能な軌道の前記空間が前記生成された候補軌道の有限集合によって十分にカバーされている、こと、および
前記車両の制御に関連した操作を簡易化するために、前記選択された推定上の最適軌道を使用すること。
[本発明1017]
前記候補軌道の有限集合に1つまたは複数の制約を適用することを含む、本発明1016の方法。
[本発明1018]
前記候補軌道を有向グラフのエッジとして表すことを含む、本発明1016の方法。
[本発明1019]
前記環境が車両を含む、本発明1016の方法。
[本発明1020]
車両の候補軌道の有限集合を生成することが、前記車両の前記位置および所与の時点での所与の制御ポリシーに対する前記車両の予期される応答を表すモデルを適用することを含む、本発明1016の方法。
[本発明1021]
前記制御ポリシーが、前記車両を制御するコマンドを決定するフィードバック機能を含む、本発明1020の方法。
[本発明1022]
前記車両の実際の軌道を所与の期間にわたって監視することを含む、本発明1016の方法。
[本発明1023]
前記所与の期間にわたって、前記車両の前記実際の軌道を前記推定上の最適軌道と比較することを含む、本発明1022の方法。
[本発明1024]
前記車両の制御に関連した操作を簡易化することが、運転者のパフォーマンスを監視することを含む、本発明1016の方法。
[本発明1025]
前記運転者のパフォーマンスの前記監視の結果を報告することを含む、本発明1024の方法。
[本発明1026]
1つまたは複数のパフォーマンスメトリックに基づいて前記運転者のパフォーマンスを評価することを含む、本発明1024の方法。
[本発明1027]
事故発生の可能性を評価することを含む、本発明1024の方法。
[本発明1028]
前記車両の制御に関連した操作を簡易化することが、運転者のパフォーマンスを監視することを含む、本発明1016の方法。
[本発明1029]
前記車両の制御に関連した操作を簡易化することが、前記車両を自律的に走行させることを含む、本発明1016の方法。
[本発明1030]
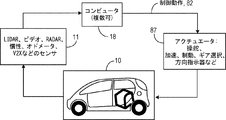
制御ポリシーとの整合性、および世界軌道に沿った連続した世界状態間のそれぞれの遷移に適用されるコスト規則との整合性が取れるように自律走行車両に最適軌道の少なくとも一部を通過させるように構成された制御可能な装置と、
前記世界軌道に従って前記制御可能な装置にコマンドを提供するコントローラと、
連続した時点における世界状態に関する情報のソースと、
計算要素であって、
(a)各世界状態が、前記世界状態に関する情報に少なくとも部分的に基づいた前記車両の状態と前記車両の環境の状態と前記環境内の少なくとも1つの他の物体の状態との組み合わせを表す、前記世界状態の集合、および
(b)各世界軌道が、前記世界状態のうちのある世界状態と前記世界状態のうちの別の世界状態との間の時間的遷移を表す、前記世界軌道の集合
を反復的に更新することであって、
前記更新の前記反復の各々が、
前記世界状態のうちの1つまたは複数の各々について、および対応する車両制御ポリシーについて、前記世界状態から次の世界状態までの候補軌道をシミュレートすることと、
前記シミュレートされた候補軌道が制約に違反しない場合、前記軌道を前記世界軌道の集合に追加して、更新された世界軌道の集合を形成することと、
必要に応じて、前記シミュレートされた候補軌道によって表される前記遷移に対応する前記世界状態の集合に新しい世界状態を追加して、更新された世界状態の集合を形成することと、
前記更新された世界状態の集合および前記更新された世界軌道の集合を通る最小コストパスを決定することであって、世界軌道のそれぞれの遷移にコスト規則を適用することを含む、ことと
を含む、こと、ならびに
前記車両の自律制御のために、前記最小コストパスに沿った現在の世界状態から次の世界状態への次の遷移を表す情報を前記コントローラに送ること
を行うための前記計算要素と
を含む、自律走行車両
を含む、装置。
上記のおよびその他の局面、特徴、および実施態様は、方法、装置、システム、コンポーネント、プログラム製品、ビジネス方法、機能を果たすための手段または工程などとして表現することができる。
(1)この軌道は実行可能であるべきである、すなわち、車両が該軌道を、車両の現在のまたは予期される運転速度において合理的な精度でたどることができる;
(2)この軌道は衝突がないものであるべきである、すなわち、車両が該軌道に沿って走行した場合、いかなる物体とも衝突しない;および
(3)この軌道は、地域の動作規則もしくは交通規則、一般的な運転慣行17、または一般の乗客もしくは特定の乗客の運転の好み19、またはそれらの要素のうちの任意の2つ以上の組み合わせを含みうる既定の規則セットに従うべきである。これらの要素およびおそらくはその他の類似した要素を併せて、動作規則と一般に呼ぶこともある(また本発明者らは、動作規則を運転規則とも呼ぶ)。すべての既定の運転規則に従う軌道が存在しない場合、軌道は規則違反の厳しさおよび程度を最小限にするべきである。
完全性および漸近的最適性:xで世界状態を示し、uで制御動作(操舵、スロットリング、制動など)を示し、Tで有限時間間隔を示す。

上記の考察において、本発明者らは、一連の時間ステップの各時間ステップで最適軌道が決定され、最適軌道の現在の部分に対応するフィードバック制御が、車両に最適軌道を通過させるために車両の動作を制御するように実行されるシステムについて説明した。時間の経過とともに、自動運転車両は目的地に到達する最適軌道をたどる。
a.以下のうちの1つまたは2つもしくはそれ以上の任意の組み合わせの解析によって決定される、運転者の安全性:
i.候補軌道により、自車が、停止信号または停止標識によって規定された領域内で完全に停止することができなくなるイベントの数として計算される安全性メトリック(a)。
ii.候補軌道により、自車が、譲れの信号または譲れの標識によって規定された領域内に位置するときに他の車両、自転車通行者、歩行者、または他の動的障害物に道を譲ることができなくなるイベントの数として計算される安全性メトリック(b)。
iii.候補軌道により、自車が、歩行者または自転車通行者が横断歩道に存在した場合に歩行者横断歩道で道を譲ることができなくなるイベントの数として計算される安全性メトリック(c)。
iv.候補軌道により、自車が、1で特定された静的または動的障害物のいずれかの部分、または任意の他の物体もしくは道路特徴と衝突することになるイベントの数として計算される安全性メトリック(d)。
v.候補軌道により、自車が、破線でない車線標示を横切るかまたは走行可能な路面を離れることになるイベントの数として計算される安全性メトリック(e)。
vi.候補軌道により、自車が、交差点で優先順位に正しく従うことができなくなるイベントの数として計算される安全性メトリック(f)。
vii.候補軌道により、自車が、i〜viに記載されていない動作規則に正しく従うことができなくなるイベントの数として計算される安全性メトリック(g)。
viii.候補軌道に沿った所与の点における最高車両速度と候補軌道上の同じ点における最高速度制限とのパーセント差の最大値として計算される安全性メトリック(h)。
ix.候補軌道に沿った先行車両との車間距離(headway distance)と、所与の点における自車速度および候補軌道上の同じ点における先行車両の速度の差との比の最小値の逆数として計算される安全性メトリック(i)。このメトリックは「衝突余裕時間(time to collision)」とも呼ばれる[LaVaile2006]。
x.候補軌道により、自車が、所定の回数を超えて隣接する走行車線を横切って移行し、したがって「蛇行」挙動を呈することになるイベントの数として計算される安全性メトリック(j)。
xi.候補軌道を正確にたどるために自車によって必要とされるであろう最大横加速度(軌道上の所与の点における車両速度の二乗を、所与の軌道上の同じ点における曲率半径で割ったものとして計算される)と、現在の環境条件が与えられた場合の最大許容横加速度との比として計算される安全性メトリック(k)。
xii.候補軌道を正確にたどるために自車によって必要とされるであろう最大縦加速度(軌道上の所与の点における縦速度の時間微分として計算される)と、現在の環境条件が与えられた場合の最大許容縦加速度との比として計算される安全性メトリック(l)。
i.候補軌道を正確にたどるために自車によって必要とされるであろう最大縦加速度(軌道上の所与の点における縦速度の時間微分として計算される)と、選択された最大快適縦加速度値との比として計算される縦方向快適性メトリック(a)。
ii.候補軌道を正確にたどるために自車によって必要とされるであろう最大縦方向ジャーク(軌道上の所与の点における縦加速度の時間微分として計算される)と、選択された最大快適縦方向ジャーク値との比として計算される縦方向快適性メトリック(b)。
iii.候補軌道を正確にたどるために自車によって必要とされるであろう最大横加速度(軌道上の所与の点における車両速度の二乗を、所与の軌道上の同じ点における曲率半径で割ったものとして計算される)と、選択された最大快適横加速度値との比として計算される横方向快適性メトリック(a)。
iv.候補軌道を正確にたどるために自車によって必要とされるであろう最大横方向ジャーク(軌道上の所与の点における横加速度の時間微分として計算される)と、選択された最大快適横方向ジャーク値との比として計算される横方向快適性メトリック(b)。
i.所与の候補軌道の長さをすべての候補軌道の最小長さで割ったものとして計算される燃料消費量メトリック(a)。
ii.候補軌道を正確にたどるために必要とされる(車両データおよび既定のモデルに基づいて計算される)推定燃料消費量と、運転者データベースからのデータおよび既定のモデルに基づいて計算される、現在の走行時間における走行した経路のベースライン燃料消費レベルとの比として計算される燃料消費量メトリック(b)。
iii.(車両データおよび既定のモデルに基づいて計算される)候補軌道上で自車が受けるであろう車両摩損と、運転者データベースからのデータおよび既定のモデルに基づいて計算される、走行した経路および時間のベースライン摩損レベルとの比として計算される、車両摩損メトリック。
(これらのメトリックは、場合によっては、自動運転車両の場合に最適軌道を特定するために使用されたコストとは異なることに留意されたい。)
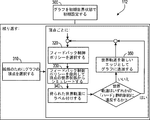
1.運転者の実際のパフォーマンスについての個々のメトリックを、最適軌道についての同じメトリックと比較することができる。
a.メトリックのパーセント差が構成可能なパーセンテージ(すなわち、閾値パフォーマンスレベル)を超える場合、その特定の基準における運転者の運転パフォーマンスは不良としてラベル付けされる。
b.メトリックのパーセント差が構成可能なパーセンテージ(すなわち、閾値パフォーマンスレベル)未満である場合、その特定の基準における運転者の運転パフォーマンスは良好としてラベル付けされる。
a.メトリックの和のパーセント差が構成可能なパーセンテージ(すなわち、閾値パフォーマンスレベル)を超える場合、運転者の全般的な運転パフォーマンスは、時点kから時点k+Tまでの時間間隔にわたり不良とラベル付けされる。
b.メトリックの和のパーセント差が構成可能なパーセンテージ(すなわち、閾値パフォーマンスレベル)未満である場合、運転者の全般的な運転パフォーマンスは、時点kから時点k+Tまでの時間間隔にわたり良好とラベル付けされる。
Claims (9)
- 以下を含む動作によって車両を環境内で目的地まで、1つまたは複数のプロセッサによって、自律的に走行させることを含む方法:
所与の時点での車両の位置を起点とし前記所与の時点から期間後の前記車両の位置を終点とする前記車両の候補軌道の有限集合を、1つまたは複数のプロセッサによって、生成すること、
前記車両の動作規則の違反を決定するための制御ポリシーに基づき、候補軌道の前記有限集合のそれぞれの候補軌道に関して、前記車両の応答を、1つまたは複数のプロセッサによって、シミュレートすること、
前記候補軌道および前記車両の動作規則の違反と関連付けられたコストを、1つまたは複数のプロセッサによって、決定することであって、所与の軌道と関連付けられた前記コストが前記所与の軌道の連続した状態間の遷移と関連付けられたコストに基づいて評価される、こと、
前記候補軌道と関連付けられた前記コストに基づいて、前記候補軌道の中から推定上の最適軌道を、1つまたは複数のプロセッサによって、選択すること、ならびに
前記選択された推定上の最適軌道に基づいて、前記車両のアクチュエータに、前記環境内で前記目的地に向かって前記車両を自律的に走行させる制御動作を行うよう、1つまたは複数のプロセッサによって、命令すること。 - 前記車両の制御に関連した操作を簡易化することが、前記推定上の最適軌道と関連付けられたフィードバック制御ポリシーを、前記車両の制御要素に適用することを含み、前記フィードバック制御ポリシーの適用が、前記車両の状態および前記環境の状態に基づく、請求項1記載の方法。
- 前記候補軌道の有限集合に1つまたは複数の制約を適用することを含み、前記制約が、前記連続した時点における前記世界状態のシーケンスに基づいて適用される、請求項1記載の方法。
- 前記推定上の最適軌道が、前記車両の速度および方向の両方と関連付けられ、前記推定上の最適軌道を選択することが、有向グラフを通る最小コストパスを決定することを含み、前記候補軌道が前記有向グラフのエッジを含み、前記最小コストパスのコストが、制約の違反と関連付けられたペナルティを含む、請求項1記載の方法。
- 車両の候補軌道の有限集合を生成することが、前記車両の前記位置および前記所与の時点での所与の制御ポリシーに対する前記車両の予期される応答を表すモデルを適用することを含み、前記モデルが、前記環境車両の要素の位置での前記所与の制御ポリシーおよび前記車両の予期される応答に対する前記環境の要素の応答を表す、請求項1記載の方法。
- 所与の軌道と関連付けられた前記コストが、前記車両の状態と前記環境の状態との相互作用と関連付けられたコストに基づき、前記コストが、軌道の2つ以上の世界状態のシーケンスにわたって経時的に解釈されるコスト規則の表現を可能にする形式言語のコスト規則として表現されている、請求項1記載の方法。
- 所与の軌道と関連付けられた前記コストが、前記車両の状態と前記環境の状態との相互作用と関連付けられたコストに基づく、請求項1記載の方法。
- 前記選択された推定上の最適軌道が、前記車両の速度および方向の両方と関連付けられている、請求項1記載の方法。
- 前記環境の状態が、前記対応する時点での別の車両、歩行者、および障害物の状態を含む、請求項1記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/078,143 US9645577B1 (en) | 2016-03-23 | 2016-03-23 | Facilitating vehicle driving and self-driving |
| US15/078,143 | 2016-03-23 | ||
| PCT/US2017/023193 WO2017165286A1 (en) | 2016-03-23 | 2017-03-20 | Facilitating vehicle driving and self-driving |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019512824A JP2019512824A (ja) | 2019-05-16 |
| JP2019512824A5 JP2019512824A5 (ja) | 2019-10-31 |
| JP6764945B2 true JP6764945B2 (ja) | 2020-10-07 |
Family
ID=58644557
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018559805A Active JP6764945B2 (ja) | 2016-03-23 | 2017-03-20 | 車両の運転および自動運転を簡易化する方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (4) | US9645577B1 (ja) |
| EP (1) | EP3433691B1 (ja) |
| JP (1) | JP6764945B2 (ja) |
| KR (2) | KR102071412B1 (ja) |
| CN (1) | CN109313445B (ja) |
| SG (1) | SG11201808076UA (ja) |
| WO (1) | WO2017165286A1 (ja) |
Families Citing this family (212)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9657925B2 (en) | 2014-05-22 | 2017-05-23 | Feit Electric Company, Inc. | Twist and lock mounting bracket |
| US9849784B1 (en) | 2015-09-30 | 2017-12-26 | Waymo Llc | Occupant facing vehicle display |
| US10012984B2 (en) * | 2015-12-14 | 2018-07-03 | Mitsubishi Electric Research Laboratories, Inc. | System and method for controlling autonomous vehicles |
| WO2017120336A2 (en) * | 2016-01-05 | 2017-07-13 | Mobileye Vision Technologies Ltd. | Trained navigational system with imposed constraints |
| JP6294905B2 (ja) * | 2016-03-31 | 2018-03-14 | 株式会社Subaru | 表示装置 |
| US10303166B2 (en) * | 2016-05-23 | 2019-05-28 | nuTonomy Inc. | Supervisory control of vehicles |
| ES2903532T3 (es) * | 2016-06-10 | 2022-04-04 | Univ Duke | Planificación de movimiento para vehículos autónomos y procesadores reconfigurables de planificación de movimiento |
| US11092446B2 (en) | 2016-06-14 | 2021-08-17 | Motional Ad Llc | Route planning for an autonomous vehicle |
| US10309792B2 (en) | 2016-06-14 | 2019-06-04 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US10126136B2 (en) | 2016-06-14 | 2018-11-13 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US10829116B2 (en) * | 2016-07-01 | 2020-11-10 | nuTonomy Inc. | Affecting functions of a vehicle based on function-related information about its environment |
| US9884630B1 (en) * | 2016-07-05 | 2018-02-06 | Uber Technologies, Inc. | Autonomous vehicle performance optimization system |
| DE102016009763A1 (de) * | 2016-08-11 | 2018-02-15 | Trw Automotive Gmbh | Steuerungssystem und Steuerungsverfahren zum Bestimmen einer Trajektorie und zum Erzeugen von zugehörigen Signalen oder Steuerbefehlen |
| US10599150B2 (en) | 2016-09-29 | 2020-03-24 | The Charles Stark Kraper Laboratory, Inc. | Autonomous vehicle: object-level fusion |
| US10489529B2 (en) | 2016-10-14 | 2019-11-26 | Zoox, Inc. | Scenario description language |
| US10331129B2 (en) | 2016-10-20 | 2019-06-25 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10681513B2 (en) | 2016-10-20 | 2020-06-09 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10857994B2 (en) | 2016-10-20 | 2020-12-08 | Motional Ad Llc | Identifying a stopping place for an autonomous vehicle |
| US10473470B2 (en) | 2016-10-20 | 2019-11-12 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US11042161B2 (en) * | 2016-11-16 | 2021-06-22 | Symbol Technologies, Llc | Navigation control method and apparatus in a mobile automation system |
| US10137945B2 (en) | 2016-11-30 | 2018-11-27 | Xstream Trucking Inc. | Deployable fairing for use with vehicles |
| MX2019009392A (es) | 2017-02-10 | 2019-11-28 | Nissan North America Inc | Control de la administracion operacional de vehiculos autonomos. |
| MX2019009397A (es) | 2017-02-10 | 2019-12-05 | Nissan North America Inc | Gestion operacional de vehiculo autonomo que incluye operar una instancia de modelo de proceso de decision de markov parcialmente observable. |
| EP3580104B1 (en) | 2017-02-10 | 2020-11-11 | Nissan North America, Inc. | Autonomous vehicle operational management blocking monitoring |
| US10671076B1 (en) | 2017-03-01 | 2020-06-02 | Zoox, Inc. | Trajectory prediction of third-party objects using temporal logic and tree search |
| US10353390B2 (en) | 2017-03-01 | 2019-07-16 | Zoox, Inc. | Trajectory generation and execution architecture |
| US10234864B2 (en) | 2017-03-07 | 2019-03-19 | nuTonomy Inc. | Planning for unknown objects by an autonomous vehicle |
| US10095234B2 (en) * | 2017-03-07 | 2018-10-09 | nuTonomy Inc. | Planning for unknown objects by an autonomous vehicle |
| US10281920B2 (en) | 2017-03-07 | 2019-05-07 | nuTonomy Inc. | Planning for unknown objects by an autonomous vehicle |
| WO2018170074A1 (en) | 2017-03-14 | 2018-09-20 | Starsky Robotics, Inc. | Vehicle sensor system and method of use |
| US10168705B2 (en) * | 2017-04-06 | 2019-01-01 | Uber Technologies, Inc. | Automatic tuning of autonomous vehicle cost functions based on human driving data |
| US10101745B1 (en) | 2017-04-26 | 2018-10-16 | The Charles Stark Draper Laboratory, Inc. | Enhancing autonomous vehicle perception with off-vehicle collected data |
| WO2018220829A1 (ja) * | 2017-06-02 | 2018-12-06 | 本田技研工業株式会社 | ポリシー生成装置及び車両 |
| WO2018232319A1 (en) * | 2017-06-15 | 2018-12-20 | Faac Incorporated | Driving simulation scoring system |
| US10496099B2 (en) * | 2017-07-18 | 2019-12-03 | Uatc, Llc | Systems and methods for speed limit context awareness |
| GB2564897A (en) * | 2017-07-27 | 2019-01-30 | Kompetenzzentrum Das Virtuelle Fahrzeug | Method and process for motion planning in (un-)structured environments with pedestrians and use of probabilistic manifolds |
| IL253769B (en) * | 2017-07-31 | 2022-03-01 | Israel Aerospace Ind Ltd | Planning a path in motion |
| US10620634B2 (en) * | 2017-08-23 | 2020-04-14 | Uatc, Llc | Vehicle interface for autonomous vehicle |
| US10558217B2 (en) * | 2017-08-28 | 2020-02-11 | GM Global Technology Operations LLC | Method and apparatus for monitoring of an autonomous vehicle |
| US20190212747A1 (en) * | 2017-08-30 | 2019-07-11 | Continental Automotive Systems, Inc. | Lane Marker Signal Improvement through Mapped Geo-Referenced Lane Boundaries |
| US10831202B1 (en) | 2017-09-01 | 2020-11-10 | Zoox, Inc. | Onboard use of scenario description language |
| CN115503752A (zh) * | 2017-09-08 | 2022-12-23 | 动态Ad有限责任公司 | 用于操作车辆的方法和系统 |
| US11378955B2 (en) | 2017-09-08 | 2022-07-05 | Motional Ad Llc | Planning autonomous motion |
| US10515321B2 (en) * | 2017-09-11 | 2019-12-24 | Baidu Usa Llc | Cost based path planning for autonomous driving vehicles |
| US10496098B2 (en) * | 2017-09-12 | 2019-12-03 | Baidu Usa Llc | Road segment-based routing guidance system for autonomous driving vehicles |
| US11003183B2 (en) * | 2017-09-13 | 2021-05-11 | Baidu Usa Llc | Driving scene based path planning for autonomous driving vehicles |
| US11533589B2 (en) | 2017-09-18 | 2022-12-20 | Telefonaktiebolaget Lm Ericsson (Publ) | Network-assisted scanning of a surrounding environment |
| EP3685366A1 (en) | 2017-09-18 | 2020-07-29 | Telefonaktiebolaget LM Ericsson (Publ) | System and method for providing precise driving recommendations based on network-assisted scanning of a surrounding environment |
| US10739774B2 (en) * | 2017-10-06 | 2020-08-11 | Honda Motor Co., Ltd. | Keyframe based autonomous vehicle operation |
| DE102017124951A1 (de) * | 2017-10-25 | 2019-04-25 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren zum Betrieb eines selbstfahrenden Kraftfahrzeugs und selbstfahrendes Kraftfahrzeug |
| WO2019088977A1 (en) | 2017-10-30 | 2019-05-09 | Nissan North America, Inc. | Continual planning and metareasoning for controlling an autonomous vehicle |
| WO2019089015A1 (en) | 2017-10-31 | 2019-05-09 | Nissan North America, Inc. | Autonomous vehicle operation with explicit occlusion reasoning |
| WO2019088989A1 (en) | 2017-10-31 | 2019-05-09 | Nissan North America, Inc. | Reinforcement and model learning for vehicle operation |
| US10677686B2 (en) * | 2017-11-14 | 2020-06-09 | GM Global Technology Operations LLC | Method and apparatus for autonomous system performance and grading |
| US11084504B2 (en) | 2017-11-30 | 2021-08-10 | Nissan North America, Inc. | Autonomous vehicle operational management scenarios |
| US10860018B2 (en) | 2017-11-30 | 2020-12-08 | Tusimple, Inc. | System and method for generating simulated vehicles with configured behaviors for analyzing autonomous vehicle motion planners |
| JP6911739B2 (ja) * | 2017-12-13 | 2021-07-28 | トヨタ自動車株式会社 | 運転支援装置 |
| SE542387C2 (en) * | 2017-12-20 | 2020-04-21 | Scania Cv Ab | Method and control arrangement in a transportation surveillance system, monitoring a system comprising autonomous vehicles, for assisting a human operator in predictive decision making |
| US10816990B2 (en) * | 2017-12-21 | 2020-10-27 | Baidu Usa Llc | Non-blocking boundary for autonomous vehicle planning |
| DE102017223717B4 (de) * | 2017-12-22 | 2019-07-18 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Roboters in einem Multiagentensystem, Roboter und Multiagentensystem |
| US10466707B2 (en) * | 2017-12-22 | 2019-11-05 | X Development Llc | Planning robot stopping points to avoid collisions |
| WO2020204871A1 (en) * | 2017-12-22 | 2020-10-08 | Nissan North America, Inc. | Shared autonomous vehicle operational management |
| US10713510B2 (en) * | 2017-12-29 | 2020-07-14 | Waymo Llc | Autonomous vehicle system configured to respond to temporary speed limit signs |
| US11718303B2 (en) | 2018-01-03 | 2023-08-08 | Toyota Research Institute, Inc. | Vehicles and methods for building vehicle profiles based on reactions created by surrounding vehicles |
| WO2019139815A1 (en) | 2018-01-12 | 2019-07-18 | Duke University | Apparatus, method and article to facilitate motion planning of an autonomous vehicle in an environment having dynamic objects |
| US20190220016A1 (en) * | 2018-01-15 | 2019-07-18 | Uber Technologies, Inc. | Discrete Decision Architecture for Motion Planning System of an Autonomous Vehicle |
| US10908608B2 (en) * | 2018-01-18 | 2021-02-02 | Baidu Usa Llc | Method and system for stitching planning trajectories from consecutive planning cycles for smooth control execution of autonomous driving vehicles |
| US10688991B2 (en) | 2018-01-24 | 2020-06-23 | GM Global Technology Operations LLC | Systems and methods for unprotected maneuver mitigation in autonomous vehicles |
| US20180150081A1 (en) * | 2018-01-24 | 2018-05-31 | GM Global Technology Operations LLC | Systems and methods for path planning in autonomous vehicles |
| US10745006B2 (en) * | 2018-02-01 | 2020-08-18 | GM Global Technology Operations LLC | Managing automated driving complexity of the forward path using perception system measures |
| TWI822729B (zh) | 2018-02-06 | 2023-11-21 | 美商即時機器人股份有限公司 | 用於儲存一離散環境於一或多個處理器之一機器人之運動規劃及其改良操作之方法及設備 |
| GB2570887B (en) * | 2018-02-07 | 2020-08-12 | Jaguar Land Rover Ltd | A system for a vehicle |
| US10955851B2 (en) | 2018-02-14 | 2021-03-23 | Zoox, Inc. | Detecting blocking objects |
| CN111902782A (zh) | 2018-02-26 | 2020-11-06 | 北美日产公司 | 集中式共享自主运载工具操作管理 |
| US11568434B2 (en) * | 2018-02-27 | 2023-01-31 | Verizon Patent And Licensing Inc. | Systems and methods for executing feedback actions based upon vehicle practices |
| US11636375B2 (en) * | 2018-02-27 | 2023-04-25 | Toyota Research Institute, Inc. | Adversarial learning of driving behavior |
| US10983522B2 (en) * | 2018-03-09 | 2021-04-20 | Baidu Usa Llc | Emergency stop speed profile for autonomous vehicles |
| WO2019174053A1 (zh) * | 2018-03-16 | 2019-09-19 | 深圳市大疆创新科技有限公司 | 可移动平台及其控制方法 |
| PL3769174T3 (pl) | 2018-03-21 | 2022-10-24 | Realtime Robotics, Inc. | Planowanie przemieszczania robota do różnych środowisk i zadań oraz jego ulepszone działanie |
| US11243541B2 (en) * | 2018-03-23 | 2022-02-08 | Uatc, Llc | Motion-plan validator for autonomous vehicle |
| US10414395B1 (en) | 2018-04-06 | 2019-09-17 | Zoox, Inc. | Feature-based prediction |
| US11315204B2 (en) * | 2018-04-12 | 2022-04-26 | Coursera, Inc. | Updating sequence of online courses for new learners while maintaining previous sequences of online courses for previous learners |
| US11511745B2 (en) * | 2018-04-27 | 2022-11-29 | Huawei Technologies Co., Ltd. | Method and system for adaptively controlling object spacing |
| US11475182B1 (en) * | 2018-05-04 | 2022-10-18 | Apple Inc. | Simulation-based map validation |
| DE102018207102A1 (de) * | 2018-05-08 | 2019-11-14 | Robert Bosch Gmbh | Verfahren zur Ermittlung der Trajektorienfolgegenauigkeit |
| US11610165B2 (en) | 2018-05-09 | 2023-03-21 | Volvo Car Corporation | Method and system for orchestrating multi-party services using semi-cooperative nash equilibrium based on artificial intelligence, neural network models,reinforcement learning and finite-state automata |
| US11126873B2 (en) | 2018-05-17 | 2021-09-21 | Zoox, Inc. | Vehicle lighting state determination |
| US10977605B2 (en) * | 2018-06-05 | 2021-04-13 | Signal Ocean Ltd | Carrier path prediction based on dynamic input data |
| US11120688B2 (en) | 2018-06-29 | 2021-09-14 | Nissan North America, Inc. | Orientation-adjust actions for autonomous vehicle operational management |
| CN108897216A (zh) * | 2018-07-03 | 2018-11-27 | 吉林大学 | 一种基于区域虚拟力场的智能汽车模型预测决策方法 |
| US11112795B1 (en) * | 2018-08-07 | 2021-09-07 | GM Global Technology Operations LLC | Maneuver-based interaction system for an autonomous vehicle |
| EP3854646B1 (en) | 2018-08-14 | 2024-05-29 | Mobileye Vision Technologies Ltd. | Systems and methods for navigating with safe distances |
| US11237564B2 (en) * | 2018-08-23 | 2022-02-01 | Uatc, Llc | Motion planning system of an autonomous vehicle |
| CN109324608B (zh) * | 2018-08-31 | 2022-11-08 | 阿波罗智能技术(北京)有限公司 | 无人车控制方法、装置、设备以及存储介质 |
| CN110928277B (zh) * | 2018-08-31 | 2023-11-17 | 阿波罗智能技术(北京)有限公司 | 智能路侧单元的障碍物提示方法、装置及设备 |
| CN109212572B (zh) * | 2018-08-31 | 2021-05-04 | 百度在线网络技术(北京)有限公司 | 定位漂移检测方法、装置、设备及计算机可读存储介质 |
| US11181921B2 (en) * | 2018-09-14 | 2021-11-23 | Huawei Technologies Co., Ltd. | System and method for hierarchical planning in autonomous vehicles |
| DE102018215949A1 (de) * | 2018-09-19 | 2020-03-19 | Robert Bosch Gmbh | Verfahren zur Trajektorienplanung eines beweglichen Objektes |
| DE102018216423A1 (de) * | 2018-09-26 | 2020-03-26 | Robert Bosch Gmbh | Bestimmung eines Ansteuerungssignals für ein teilautonomes Fahrzeug |
| JP6892516B2 (ja) * | 2018-09-28 | 2021-06-23 | バイドゥ ドットコム タイムス テクノロジー (ベイジン) カンパニー リミテッド | 列挙に基づく自動運転車両の3ポイントターン計画 |
| DK3633468T3 (da) | 2018-10-04 | 2022-02-07 | Univ Muenchen Tech | Fordelt automatiseret syntese af konstruktions-ledsagende korrektur-styreapparater (controllere) |
| US11256260B2 (en) * | 2018-10-05 | 2022-02-22 | Waymo Llc | Generating trajectories for autonomous vehicles |
| DK201970121A1 (en) | 2018-10-30 | 2020-06-04 | Aptiv Technologies Limited | GENERATION OF OPTIMAL TRAJECTORIES FOR NAVIGATION OF VEHICLES |
| EP3648021A1 (en) * | 2018-10-30 | 2020-05-06 | Aptiv Technologies Limited | Generation of optimal trajectories for navigation of vehicles |
| TWI674984B (zh) | 2018-11-15 | 2019-10-21 | 財團法人車輛研究測試中心 | 自動駕駛車輛之行駛軌跡規劃系統及方法 |
| US11287272B2 (en) | 2018-11-19 | 2022-03-29 | International Business Machines Corporation | Combined route planning and opportunistic searching in variable cost environments |
| US11469906B2 (en) * | 2018-11-20 | 2022-10-11 | Motional Ad Llc | Systems and methods for implementing data security |
| US11192545B1 (en) | 2018-12-05 | 2021-12-07 | Waymo Llc | Risk mitigation in speed planning |
| DK201970148A1 (en) | 2018-12-10 | 2020-07-06 | Aptiv Tech Ltd | Motion graph construction and lane level route planning |
| CN109711009B (zh) * | 2018-12-13 | 2023-06-27 | 北京掌行通信息技术有限公司 | 无人驾驶汽车性能评价方法、装置、电子设备及介质 |
| US10931374B1 (en) * | 2018-12-13 | 2021-02-23 | Waymo Llc | Vehicle with free-space optical link for log data uploading |
| GB2592293B (en) * | 2018-12-18 | 2022-11-30 | Motional Ad Llc | Operation of a vehicle using motion planning with machine learning |
| KR102505300B1 (ko) | 2018-12-18 | 2023-03-02 | 모셔널 에이디 엘엘씨 | 복수의 모션 제약을 사용하는 차량의 동작 |
| US11803184B2 (en) | 2018-12-18 | 2023-10-31 | Motional Ad Llc | Methods for generating maps using hyper-graph data structures |
| US10962372B1 (en) * | 2018-12-31 | 2021-03-30 | Accelerate Labs, Llc | Navigational routes for autonomous vehicles |
| US11364929B2 (en) | 2019-01-04 | 2022-06-21 | Toyota Research Institute, Inc. | Systems and methods for shared control of a vehicle |
| EP3680876A1 (en) * | 2019-01-08 | 2020-07-15 | Visteon Global Technologies, Inc. | Method for planning trajectory of vehicle |
| DE102019201045B4 (de) * | 2019-01-28 | 2020-11-26 | Robert Bosch Gmbh | Verfahren, Vorrichtung und Computerprogramm zum Ermitteln einer Aktion oder Trajektorie eines Roboters |
| US10832140B2 (en) * | 2019-01-30 | 2020-11-10 | StradVision, Inc. | Method and device for providing information for evaluating driving habits of driver by detecting driving scenarios occurring during driving |
| US11364936B2 (en) * | 2019-02-28 | 2022-06-21 | Huawei Technologies Co., Ltd. | Method and system for controlling safety of ego and social objects |
| JP7155043B2 (ja) * | 2019-02-28 | 2022-10-18 | 株式会社日立製作所 | サーバ、車両制御システム |
| US11427267B2 (en) | 2019-03-06 | 2022-08-30 | Trucklabs, Inc. | Deployable fairing system for use with vehicles |
| US11106212B2 (en) * | 2019-03-26 | 2021-08-31 | Baidu Usa Llc | Path planning for complex scenes with self-adjusting path length for autonomous driving vehicles |
| WO2020198937A1 (en) * | 2019-03-29 | 2020-10-08 | Baidu.Com Times Technology (Beijing) Co., Ltd. | Communications protocols between planning and control of autonomous driving vehicle |
| US11305765B2 (en) * | 2019-04-23 | 2022-04-19 | Baidu Usa Llc | Method for predicting movement of moving objects relative to an autonomous driving vehicle |
| RU2750152C1 (ru) * | 2019-04-25 | 2021-06-22 | Общество с ограниченной ответственностью "Яндекс Беспилотные Технологии" | Способы и системы для определения порядка оценивания траекторий транспортных средств |
| US11249184B2 (en) | 2019-05-07 | 2022-02-15 | The Charles Stark Draper Laboratory, Inc. | Autonomous collision avoidance through physical layer tracking |
| DE102019206562A1 (de) * | 2019-05-07 | 2020-11-12 | Volkswagen Aktiengesellschaft | Verfahren zum Ermitteln einer Fahrzeugtrajektorie |
| CN110228473B (zh) * | 2019-05-27 | 2021-07-02 | 驭势科技(北京)有限公司 | 一种智能车换道决策方法、装置、存储介质和智能车 |
| WO2020247207A1 (en) | 2019-06-03 | 2020-12-10 | Realtime Robotics, Inc. | Apparatus, methods and articles to facilitate motion planning in environments having dynamic obstacles |
| US10769953B1 (en) | 2019-06-11 | 2020-09-08 | Toyota Motor North America, Inc. | Vehicle-to-vehicle sensor data sharing |
| US11315427B2 (en) | 2019-06-11 | 2022-04-26 | Toyota Motor North America, Inc. | Vehicle-to-vehicle sensor data sharing |
| US11214270B2 (en) * | 2019-06-28 | 2022-01-04 | Woven Planet North America, Inc. | Systems and methods for navigating vehicles with redundant navigation systems |
| EP3760507A1 (en) * | 2019-07-04 | 2021-01-06 | TTTech Auto AG | Safe trajectory selection for autonomous vehicles |
| DE102019118366A1 (de) * | 2019-07-08 | 2021-01-14 | Zf Friedrichshafen Ag | Verfahren sowie Steuergerät für ein System zum Steuern eines Kraftfahrzeugs |
| WO2021010396A1 (ja) * | 2019-07-15 | 2021-01-21 | 株式会社Soken | 走行記憶システム、潜在事故責任決定装置、走行記憶方法、潜在事故責任決定方法、映像記録システム、自動運転システム、および映像記録方法 |
| JP7200868B2 (ja) * | 2019-07-23 | 2023-01-10 | トヨタ自動車株式会社 | 車両制御システム及び車両制御装置 |
| US11142214B2 (en) * | 2019-08-06 | 2021-10-12 | Bendix Commercial Vehicle Systems Llc | System, controller and method for maintaining an advanced driver assistance system as active |
| US20210039664A1 (en) * | 2019-08-08 | 2021-02-11 | Toyota Jidosha Kabushiki Kaisha | Machine learning system for modifying adas behavior to provide optimum vehicle trajectory in a region |
| US20220276655A1 (en) * | 2019-08-21 | 2022-09-01 | Sony Group Corporation | Information processing device, information processing method, and program |
| US11945440B2 (en) | 2019-08-23 | 2024-04-02 | Motional Ad Llc | Data driven rule books |
| WO2021041223A1 (en) | 2019-08-23 | 2021-03-04 | Realtime Robotics, Inc. | Motion planning for robots to optimize velocity while maintaining limits on acceleration and jerk |
| CN110598311B (zh) * | 2019-09-06 | 2022-08-02 | 广东工业大学 | 一种自动驾驶车辆轨迹跟踪方法 |
| FR3100622B1 (fr) | 2019-09-10 | 2021-09-17 | Renault Sas | Procédé de démarrage de conduite autonome d’un véhicule automobile. |
| US11958183B2 (en) | 2019-09-19 | 2024-04-16 | The Research Foundation For The State University Of New York | Negotiation-based human-robot collaboration via augmented reality |
| DE102019125401A1 (de) * | 2019-09-20 | 2021-03-25 | Technische Universität Darmstadt | Modul und Verfahren zur Absicherung von Solltrajektorien für automatisiertes Fahren |
| US11279356B2 (en) * | 2019-09-23 | 2022-03-22 | Robert Bosch Gmbh | Vehicle dynamics control system utilizing heading error and derivative |
| US11643072B2 (en) * | 2019-09-27 | 2023-05-09 | Zoox, Inc. | Planning accommodations for particulate matter |
| US11754408B2 (en) * | 2019-10-09 | 2023-09-12 | Argo AI, LLC | Methods and systems for topological planning in autonomous driving |
| US11640170B1 (en) | 2019-10-29 | 2023-05-02 | Zoox, Inc. | Identification of particulate matter in sensor data |
| CN110764505B (zh) * | 2019-11-03 | 2022-10-04 | 华中师范大学 | 一种无人驾驶汽车控制系统 |
| RU2745804C1 (ru) * | 2019-11-06 | 2021-04-01 | Общество с ограниченной ответственностью "Яндекс Беспилотные Технологии" | Способ и процессор для управления перемещением в полосе движения автономного транспортного средства |
| US11899454B2 (en) | 2019-11-26 | 2024-02-13 | Nissan North America, Inc. | Objective-based reasoning in autonomous vehicle decision-making |
| US11635758B2 (en) | 2019-11-26 | 2023-04-25 | Nissan North America, Inc. | Risk aware executor with action set recommendations |
| US20210173402A1 (en) * | 2019-12-06 | 2021-06-10 | Lyft, Inc. | Systems and methods for determining vehicle trajectories directly from data indicative of human-driving behavior |
| JP2023506652A (ja) | 2019-12-16 | 2023-02-17 | コントロール ゲーエムベーハー | メカトロニクスシステムの安全な経路計画方法 |
| CN111007858B (zh) * | 2019-12-23 | 2023-04-28 | 北京三快在线科技有限公司 | 车辆行驶决策模型的训练方法、行驶决策确定方法及装置 |
| US11613269B2 (en) | 2019-12-23 | 2023-03-28 | Nissan North America, Inc. | Learning safety and human-centered constraints in autonomous vehicles |
| CN113091757B (zh) * | 2019-12-23 | 2022-09-27 | 百度在线网络技术(北京)有限公司 | 地图生成方法和装置 |
| US11300957B2 (en) | 2019-12-26 | 2022-04-12 | Nissan North America, Inc. | Multiple objective explanation and control interface design |
| US20210197813A1 (en) * | 2019-12-27 | 2021-07-01 | Lyft, Inc. | Systems and methods for appropriate speed inference |
| CN111258325B (zh) * | 2020-01-08 | 2022-08-02 | 哈尔滨工业大学 | 对地遥感卫星高精度高性能的姿态容错控制方法、装置及计算机存储介质 |
| TW202146189A (zh) | 2020-01-22 | 2021-12-16 | 美商即時機器人股份有限公司 | 於多機器人操作環境中之機器人之建置 |
| EP3859709A1 (en) * | 2020-01-30 | 2021-08-04 | Volkswagen Ag | Method for planning a cooperative driving maneuver, corresponding control unit and vehicle equipped with a control unit as well as computer program |
| US11577746B2 (en) | 2020-01-31 | 2023-02-14 | Nissan North America, Inc. | Explainability of autonomous vehicle decision making |
| US11714971B2 (en) | 2020-01-31 | 2023-08-01 | Nissan North America, Inc. | Explainability of autonomous vehicle decision making |
| US11981349B2 (en) * | 2020-02-19 | 2024-05-14 | Nvidia Corporation | Behavior planning for autonomous vehicles |
| US11814080B2 (en) | 2020-02-28 | 2023-11-14 | International Business Machines Corporation | Autonomous driving evaluation using data analysis |
| US11702101B2 (en) | 2020-02-28 | 2023-07-18 | International Business Machines Corporation | Automatic scenario generator using a computer for autonomous driving |
| US11644331B2 (en) | 2020-02-28 | 2023-05-09 | International Business Machines Corporation | Probe data generating system for simulator |
| GB2597346B (en) | 2020-03-03 | 2022-12-21 | Motional Ad Llc | Control architectures for autonomous vehicles |
| US11782438B2 (en) | 2020-03-17 | 2023-10-10 | Nissan North America, Inc. | Apparatus and method for post-processing a decision-making model of an autonomous vehicle using multivariate data |
| US11407428B2 (en) | 2020-03-23 | 2022-08-09 | Toyota Motor North America, Inc. | Transport safety |
| EP3885226A1 (en) * | 2020-03-25 | 2021-09-29 | Aptiv Technologies Limited | Method and system for planning the motion of a vehicle |
| EP3885867A1 (en) | 2020-03-27 | 2021-09-29 | embotech AG | Method and system for controlling autonomous or semi-autonomous vehicle |
| CN115769051A (zh) * | 2020-05-04 | 2023-03-07 | 马格纳电子系统公司 | 映射系统和方法 |
| CN111381597B (zh) * | 2020-05-14 | 2021-08-03 | 吉林大学 | 一种基于高斯伪谱法的车辆避障轨迹规划方法 |
| CN112199454B (zh) * | 2020-06-30 | 2022-12-13 | 武汉烽火众智数字技术有限责任公司 | 一种基于有向图的管控车辆拦截点设置方法及装置 |
| US11473917B2 (en) | 2020-07-14 | 2022-10-18 | Argo AI, LLC | System for augmenting autonomous vehicle perception using smart nodes |
| US20220019225A1 (en) * | 2020-07-14 | 2022-01-20 | Argo AI, LLC | Smart node for autonomous vehicle perception augmentation |
| DE102020209214A1 (de) * | 2020-07-22 | 2022-01-27 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Bestimmen einer Trajektorie zum Steuern eines Fahrzeugs |
| US11835958B2 (en) * | 2020-07-28 | 2023-12-05 | Huawei Technologies Co., Ltd. | Predictive motion planning system and method |
| US11814075B2 (en) * | 2020-08-26 | 2023-11-14 | Motional Ad Llc | Conditional motion predictions |
| US20220080962A1 (en) * | 2020-09-14 | 2022-03-17 | Motional Ad Llc | Vehicle operation using a behavioral rule model |
| EP3971526B1 (en) * | 2020-09-18 | 2024-05-08 | Zenuity AB | Path planning in autonomous driving environments |
| US11648965B2 (en) * | 2020-09-28 | 2023-05-16 | Argo AI, LLC | Method and system for using a reaction of other road users to ego-vehicle actions in autonomous driving |
| US11748995B2 (en) * | 2020-09-29 | 2023-09-05 | Toyota Research Institute, Inc. | Object state tracking and prediction using supplemental information |
| US11609582B2 (en) * | 2020-10-08 | 2023-03-21 | Ford Global Technologies, Llc | Systems and methods for planning a travel route of a multifunctional robot |
| US11731654B2 (en) * | 2020-10-16 | 2023-08-22 | GM Global Technology Operations LLC | Vehicle control systems and methods |
| US20220126876A1 (en) * | 2020-10-23 | 2022-04-28 | Motional Ad Llc | Vehicle operation using behavioral rule checks |
| US11753044B2 (en) * | 2020-11-18 | 2023-09-12 | Argo AI, LLC | Method and system for forecasting reactions of other road users in autonomous driving |
| US11620836B2 (en) | 2020-12-04 | 2023-04-04 | Argo AI, LLC | Light emitting diode flicker mitigation |
| US11733054B2 (en) | 2020-12-11 | 2023-08-22 | Motional Ad Llc | Systems and methods for implementing occlusion representations over road features |
| US11681296B2 (en) * | 2020-12-11 | 2023-06-20 | Motional Ad Llc | Scenario-based behavior specification and validation |
| US20220198937A1 (en) * | 2020-12-22 | 2022-06-23 | Locomation, Inc. | User interfaces adapted for shared control of vehicles travelling in formation |
| CN112818910B (zh) * | 2021-02-23 | 2022-03-18 | 腾讯科技(深圳)有限公司 | 车辆挡位控制方法、装置、计算机设备和存储介质 |
| US11654913B2 (en) * | 2021-03-04 | 2023-05-23 | Southwest Research Institute | Vehicle control based on infrastructure and other vehicles |
| WO2022199855A1 (en) | 2021-03-26 | 2022-09-29 | Embotech Ag | Method and system for controlling autonomous or semi-autonomous vehicle |
| DE102021112119A1 (de) | 2021-05-10 | 2022-11-10 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren und Vorrichtung zur Trajektorienplanung für ein Fahrzeug |
| CN115246416B (zh) * | 2021-05-13 | 2023-09-26 | 上海仙途智能科技有限公司 | 轨迹预测方法、装置、设备及计算机可读存储介质 |
| JP7350216B2 (ja) * | 2021-05-14 | 2023-09-25 | 三菱電機株式会社 | 設計支援装置、設計支援方法および設計支援プログラム |
| CN113359779B (zh) * | 2021-07-22 | 2022-06-28 | 长沙理工大学 | 一种考虑节能减排的自动驾驶车辆速度控制方法 |
| US20230130814A1 (en) * | 2021-10-27 | 2023-04-27 | Nvidia Corporation | Yield scenario encoding for autonomous systems |
| CN114228707B (zh) * | 2021-12-22 | 2023-04-25 | 广西科技大学 | 一种无人驾驶车辆的防撞方法及系统 |
| US20230221128A1 (en) * | 2022-01-11 | 2023-07-13 | Motional Ad Llc | Graph Exploration for Rulebook Trajectory Generation |
| CN114644018A (zh) * | 2022-05-06 | 2022-06-21 | 重庆大学 | 一种基于博弈论的自动驾驶车辆人车交互决策规划方法 |
| CN115050181B (zh) * | 2022-06-06 | 2023-05-02 | 合肥工业大学 | 交叉口交通事故与交通违法的空间热点及其影响因素辨识方法 |
| US20230415772A1 (en) * | 2022-06-24 | 2023-12-28 | Motional Ad Llc | Trajectory planning based on extracted trajectory features |
| US20240092357A1 (en) * | 2022-08-31 | 2024-03-21 | Zoox, Inc. | Trajectory optimization in multi-agent environments |
| WO2024090388A1 (ja) * | 2022-10-24 | 2024-05-02 | ソフトバンクグループ株式会社 | 情報処理装置及びプログラム |
| CN115562038B (zh) * | 2022-11-01 | 2023-08-29 | 南栖仙策(南京)高新技术有限公司 | 一种反馈控制系统变化的预警方法、装置、设备及介质 |
| CN116580602B (zh) * | 2023-07-13 | 2023-10-03 | 四川大学 | 一种场面飞机滑行冲突预测与可视化方法 |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0913751B1 (de) | 1997-11-03 | 2003-09-03 | Volkswagen Aktiengesellschaft | Autonomes Fahrzeug und Verfahren zur Steuerung eines autonomen Fahrzeuges |
| AU2006256372B2 (en) * | 2005-06-09 | 2009-10-22 | Greenroad Driving Technologies Ltd. | System and method for displaying a driving profile |
| JP4525670B2 (ja) * | 2006-11-20 | 2010-08-18 | トヨタ自動車株式会社 | 走行制御計画生成システム |
| JP4623057B2 (ja) * | 2007-06-05 | 2011-02-02 | トヨタ自動車株式会社 | 自車両の移動領域取得装置 |
| JP2009061878A (ja) * | 2007-09-05 | 2009-03-26 | Toyota Motor Corp | 走行制御装置 |
| US8126642B2 (en) * | 2008-10-24 | 2012-02-28 | Gray & Company, Inc. | Control and systems for autonomously driven vehicles |
| US20100228427A1 (en) | 2009-03-05 | 2010-09-09 | Massachusetts Institute Of Technology | Predictive semi-autonomous vehicle navigation system |
| JP5262986B2 (ja) * | 2009-03-05 | 2013-08-14 | 日産自動車株式会社 | 走行経路生成装置、走行経路生成方法、及び運転操作支援装置 |
| US8392117B2 (en) * | 2009-05-22 | 2013-03-05 | Toyota Motor Engineering & Manufacturing North America, Inc. | Using topological structure for path planning in semi-structured environments |
| SE534187C2 (sv) * | 2009-06-10 | 2011-05-24 | Scania Cv Ab | Modul för bestämning av börvärden till ett styrsystem i ett fordon |
| DE102009047333A1 (de) * | 2009-12-01 | 2011-06-09 | Robert Bosch Gmbh | Verfahren zur Bestimmung einer Trajektorie eines Fahrzeugs |
| US8289664B2 (en) * | 2010-03-08 | 2012-10-16 | Pass & Seymour, Inc. | Protective device for an electrical supply facility |
| EP2584515B1 (en) * | 2010-06-15 | 2020-06-10 | Navitime Japan Co., Ltd. | Navigation system, terminal apparatus, navigation server, navigation apparatus, navigation method, and program |
| CN103119529B (zh) * | 2010-09-21 | 2016-05-25 | 丰田自动车株式会社 | 移动体 |
| GB201100844D0 (en) * | 2011-01-18 | 2011-08-17 | Bae Systems Plc | Trajectory planning |
| JP2013007660A (ja) * | 2011-06-24 | 2013-01-10 | Daihatsu Motor Co Ltd | 車両用物体認識装置 |
| BR112014012324A2 (pt) * | 2011-12-22 | 2017-05-30 | Scania Cv Ab | método e módulo para controlar uma velocidade do veículo com base em regras e/ou custos |
| US20130201316A1 (en) * | 2012-01-09 | 2013-08-08 | May Patents Ltd. | System and method for server based control |
| US9601013B2 (en) * | 2012-01-10 | 2017-03-21 | Massachusetts Institute Of Technology | Traffic signal control method and traffic signal controller |
| WO2013154073A1 (ja) * | 2012-04-10 | 2013-10-17 | 富士フイルム株式会社 | 光学異方性を有する積層体 |
| US9255989B2 (en) * | 2012-07-24 | 2016-02-09 | Toyota Motor Engineering & Manufacturing North America, Inc. | Tracking on-road vehicles with sensors of different modalities |
| US9120485B1 (en) | 2012-09-14 | 2015-09-01 | Google Inc. | Methods and systems for smooth trajectory generation for a self-driving vehicle |
| CN102890869B (zh) * | 2012-09-25 | 2015-01-14 | 孙涛 | 车辆行车路线预测通知方法及移动智能终端 |
| CN103035121A (zh) * | 2012-12-06 | 2013-04-10 | 南京航空航天大学 | 一种智能车辆自主行驶动态轨迹规划方法及系统 |
| KR101751163B1 (ko) | 2013-03-15 | 2017-06-26 | 폭스바겐 악티엔 게젤샤프트 | 차량의 경로 판정 시스템 및 그 방법 |
| DE102013207895A1 (de) * | 2013-04-30 | 2014-10-30 | Kuka Laboratories Gmbh | Fahrerloses Transportfahrzeug, System mit einem Rechner und einem fahrerlosen Transportfahrzeug, Verfahren zum Betreiben eines fahrerlosen Transportfahrzeugs |
| CN103383569B (zh) * | 2013-05-31 | 2016-12-28 | 浙江工业大学 | 基于线性时序逻辑的移动机器人最优巡回路径设定方法 |
| EP3022618B1 (en) | 2013-07-15 | 2017-10-04 | BAE SYSTEMS plc | Route planning |
| CN103390351A (zh) * | 2013-08-02 | 2013-11-13 | 常州市新科汽车电子有限公司 | 一种针对异地车辆分时限行路段的导航方法 |
| CN104616516B (zh) * | 2013-11-04 | 2017-11-14 | 深圳市赛格导航科技股份有限公司 | 一种行车安全辅助控制方法和系统 |
| US9278713B2 (en) * | 2013-12-11 | 2016-03-08 | GM Global Technology Operations LLC | Collision avoidance control integrated with EPS controller |
| US9650051B2 (en) * | 2013-12-22 | 2017-05-16 | Lytx, Inc. | Autonomous driving comparison and evaluation |
| US9097549B1 (en) | 2014-03-17 | 2015-08-04 | Ford Global Technologies, Llc | Learning automated vehicle |
| US20150292894A1 (en) | 2014-04-11 | 2015-10-15 | Telecommunication Systems, Inc. | Travel route |
| US9404761B2 (en) | 2014-05-30 | 2016-08-02 | Nissan North America, Inc. | Autonomous vehicle lane routing and navigation |
| US20150345971A1 (en) | 2014-06-03 | 2015-12-03 | Nissan North America, Inc. | Synchronously updated vehicle transportation network information for autonomous vehicle routing and navigation |
| US20150345967A1 (en) | 2014-06-03 | 2015-12-03 | Nissan North America, Inc. | Probabilistic autonomous vehicle routing and navigation |
| KR20160013713A (ko) * | 2014-07-28 | 2016-02-05 | 현대자동차주식회사 | 자율주행차량의 전역경로 생성장치 및 방법 |
| US9650042B2 (en) | 2014-09-11 | 2017-05-16 | Cummins Inc. | Systems and methods for route planning |
| CN104590259B (zh) * | 2015-01-07 | 2015-08-26 | 福州华鹰重工机械有限公司 | 一种轨迹搜寻方法和系统 |
| CN104821080B (zh) * | 2015-03-02 | 2017-04-12 | 北京理工大学 | 基于宏观城市交通流的智能车辆行驶速度及时间预测方法 |
| US20150348112A1 (en) | 2015-08-12 | 2015-12-03 | Madhusoodhan Ramanujam | Providing Advertisements to Autonomous Vehicles |
| US9720415B2 (en) * | 2015-11-04 | 2017-08-01 | Zoox, Inc. | Sensor-based object-detection optimization for autonomous vehicles |
| CN105573323A (zh) * | 2016-01-12 | 2016-05-11 | 福州华鹰重工机械有限公司 | 自动驾驶轨迹生成方法及装置 |
-
2016
- 2016-03-23 US US15/078,143 patent/US9645577B1/en active Active
-
2017
- 2017-03-20 KR KR1020187030608A patent/KR102071412B1/ko active IP Right Grant
- 2017-03-20 JP JP2018559805A patent/JP6764945B2/ja active Active
- 2017-03-20 CN CN201780031744.1A patent/CN109313445B/zh active Active
- 2017-03-20 EP EP17770901.1A patent/EP3433691B1/en active Active
- 2017-03-20 KR KR1020207002223A patent/KR102413533B1/ko active IP Right Grant
- 2017-03-20 WO PCT/US2017/023193 patent/WO2017165286A1/en active Application Filing
- 2017-03-20 SG SG11201808076UA patent/SG11201808076UA/en unknown
- 2017-04-04 US US15/478,991 patent/US20170277193A1/en not_active Abandoned
- 2017-05-25 US US15/605,388 patent/US20170277195A1/en not_active Abandoned
- 2017-05-25 US US15/605,335 patent/US20170277194A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| KR102071412B1 (ko) | 2020-03-03 |
| CN109313445B (zh) | 2022-02-18 |
| US20170277193A1 (en) | 2017-09-28 |
| EP3433691A1 (en) | 2019-01-30 |
| WO2017165286A1 (en) | 2017-09-28 |
| EP3433691B1 (en) | 2021-04-28 |
| US9645577B1 (en) | 2017-05-09 |
| SG11201808076UA (en) | 2018-10-30 |
| KR102413533B1 (ko) | 2022-06-24 |
| JP2019512824A (ja) | 2019-05-16 |
| EP3433691A4 (en) | 2019-04-03 |
| US20170277195A1 (en) | 2017-09-28 |
| KR20200011582A (ko) | 2020-02-03 |
| CN109313445A (zh) | 2019-02-05 |
| KR20190028365A (ko) | 2019-03-18 |
| US20170277194A1 (en) | 2017-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6764945B2 (ja) | 車両の運転および自動運転を簡易化する方法 | |
| US11714413B2 (en) | Planning autonomous motion | |
| JP6969756B2 (ja) | 自律走行車の動作管理制御 | |
| US11537127B2 (en) | Systems and methods for vehicle motion planning based on uncertainty | |
| US11237564B2 (en) | Motion planning system of an autonomous vehicle | |
| US20210191394A1 (en) | Systems and methods for presenting curated autonomy-system information of a vehicle | |
| JP2020510570A (ja) | 部分観測マルコフ決定過程モデルインスタンスを動作させることを含む自律走行車動作管理 | |
| JP2020507509A (ja) | 自律走行車の動作管理ブロックモニタ | |
| US11351996B2 (en) | Trajectory prediction of surrounding vehicles using predefined routes | |
| CN110998469A (zh) | 对具有自主驾驶能力的车辆的操作进行干预 | |
| KR102626145B1 (ko) | 거동 규칙 검사를 사용한 차량 작동 | |
| Sezer | Intelligent decision making for overtaking maneuver using mixed observable Markov decision process | |
| KR20220136006A (ko) | 자율 주행 차량의 성능을 평가하기 위한 테스트 시나리오의 선택 | |
| US20230131632A1 (en) | Systems, Methods, and Computer Program Products for Severity Classifications of Simulated Collisions | |
| EP3454269A1 (en) | Planning autonomous motion | |
| Nobukawa et al. | Anticipatory speed control model applied to intersection left turns | |
| US20240028035A1 (en) | Planning autonomous motion | |
| US20230391367A1 (en) | Inferring autonomous driving rules from data | |
| Çakmak et al. | Remotely Accessible Open Test Platform for CPS Transportation and CAV Research | |
| Ojiaku | Will AI in cars lead to less road congestion? | |
| Duy | Application of Deep Reinforcement Learning for Measuring the Efficiency of Autonomous Vehicles under a Mixed-Traffic Condition in Non-Signalized Intersections | |
| CN116224952A (zh) | 确定运载工具的子系统之间的相互依赖性的方法和系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181109 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181012 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181109 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181109 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190412 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190417 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190913 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20190913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191205 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200305 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200427 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200819 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200914 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6764945 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |