JP6731181B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP6731181B2 JP6731181B2 JP2016080606A JP2016080606A JP6731181B2 JP 6731181 B2 JP6731181 B2 JP 6731181B2 JP 2016080606 A JP2016080606 A JP 2016080606A JP 2016080606 A JP2016080606 A JP 2016080606A JP 6731181 B2 JP6731181 B2 JP 6731181B2
- Authority
- JP
- Japan
- Prior art keywords
- drive transmission
- drive
- transmission path
- image forming
- forming apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Landscapes
- Electrophotography Configuration And Component (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
- Gear Transmission (AREA)
- Transmission Devices (AREA)
- Paper Feeding For Electrophotography (AREA)
Description
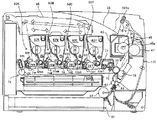
以下、本発明を適用した画像形成装置として、電子写真方式のプリンタ(以下、単にプリンタという)の一実施形態について説明する。まず、本プリンタの基本的な構成について説明する。図2は、実施形態に係るプリンタの概略構成図である。同図において、このプリンタは、イエロー、シアン、マゼンタ、ブラック(以下、Y、C、M、Kと記す)のトナー像を形成するための4つのプロセスユニット60Y,60C,60M,60Kを備えている。これらは、画像形成物質として、互いに異なる色のY,C,M,Kトナーを用いるが、それ以外は同様の構成になっており、寿命到達時に交換される。Kトナー像を形成するためのプロセスユニット60Kを例にすると、潜像担持体たるドラム状の感光体61K、現像装置62K、帯電装置63K、ドラムクリーニング装置64K、除電装置等を備えている。画像形成ユニットたるプロセスユニット60Kは、プリンタ本体に脱着可能であり、一度に消耗部品を交換できるようになっている。
図1は、構成例1に係る駆動装置30の概略断面図である。図1に示すように駆動装置30は、正逆転可能な駆動源であるモータ1を備えており、このモータ1が側板31に取り付けられている。モータ1のモータギヤ1aには、アイドラギヤ2が噛み合っている。アイドラギヤ2は、側板31と側板32とに固定された固定軸12に回転自在に支持されている。また、側板31に設けられた軸受31aと、側板32に設けられた軸受32aとによって、入力側回転軸である回転軸4が回転可能に支持されている。この回転軸4には、アイドラギヤ2と噛み合う外歯ギヤ3が固定ピン4aで固定されており、外歯ギヤ3と回転軸4とが一体で回転する。また、回転軸4の軸方向で外歯ギヤ3よりも排紙ローラ161a側には、電磁クラッチ5とプーリ6とが同軸上で、電磁クラッチ5が回転軸4に対して締結及び締結解除可能に、プーリ6が回転自在に支持されている。
図8は、構成例2に係る駆動装置30の概略断面図である。図8に示すように駆動装置30おいては、正逆転可能な駆動源であるモータ1が側板31に取り付けられている。モータ1のモータギヤ1aは、側板31と、これと対向する側板32とに固定された固定軸15に回転自在に支持されたアイドラギヤプーリ13の外歯ギヤ部13aと噛み合っている。排紙ローラ161aの回転軸19は、固定軸15に対して径方向にずれた位置に設けられており、側板32に設けられた軸受32bに回転自在に支持されている。回転軸19には、外歯ギヤ部13aと噛み合う外歯ギヤ26が回転自在に支持されており、この外歯ギヤ26と、回転軸19の軸端部に固定ピン19cで固定されたトルクリミッタ8とが、駆動爪8aを介して係合している。また、回転軸19の外歯ギヤ26よりも排紙ローラ161a側には、プーリ18と電磁クラッチ5とが同軸上で、プーリ18が回転軸19に対して回転自在に、電磁クラッチ5が回転軸19に対して締結及び締結解除可能に支持されている。プーリ18と電磁クラッチ5とは、駆動爪5aを介して係合しており一体で回転可能となっている。固定軸15に設けられたアイドラギヤプーリ13のプーリ部13bと、回転軸19に設けられたプーリ18とには、タイミングベルト17が架け渡されている。
本発明を適用した画像形成装置の他の実施形態(以下、実施形態2という)について説明する。ここで、実施形態2に係るプリンタの基本的な構成は、実施形態1に係るプリンタの構成と同様なので、その説明は省略する
図17は、変形例1に係る駆動装置30の概略断面図である。この変形例1では、回転軸4に第二クラッチ109と第一クラッチ107を取り付けたものである。この変形例1では、回転軸4は、側板31と側板32とに軸受31aと軸受32aとを介して回転自在に支持されている。入力ギヤ部103aは、第二クラッチ109(具体的には、第二クラッチ109のアーマチュア109b)に取り付けられており、入力プーリ部103bは、第一クラッチ107(具体的には、第一クラッチ107のアーマチュア107b)に取り付けられている。また、回転軸4には、アイドラギヤ2と噛み合う駆動アイドラギヤ25が取り付けられている。
図18は、変形例2に係る駆動装置30の概略断面図である。駆動装置30は、モータ1を備えている。モータ1は、側板31に取り付けられている。側板32と側板31とには、固定軸12および固定軸14が固定されている。固定軸12には、モータ入力ギヤ部112aとモータ入力プーリ部112bと有するモータ入力部材112が回転自在に支持されている。また、固定軸14には、アイドラギヤ部104bとモータ出力プーリ部104aとを有するモータ出力部材104が回転自在に支持されている。モータ1のモータギヤ1aには、モータ入力ギヤ部112aが噛み合っており、モータ入力プーリ部112bとモータ出力プーリ部104aとには、タイミングベルト113が架け渡されている。
本発明を適用した画像形成装置の他の実施形態(以下、実施形態3という)について説明する。ここで、実施形態3に係るプリンタの基本的な構成は、実施形態1に係るプリンタの構成と同様なので、その説明は省略する。
(態様A)
モータ1などの駆動源と、前記駆動源から入力される回転駆動力を、用紙などの搬送対象物を搬送する排紙ローラ161aなどの搬送回転体まで伝達する一つ目の伝達経路を形成する第一駆動伝達経路と、前記駆動源から入力される回転駆動力を前記第一駆動伝達経路に対して逆回転の回転駆動力として前記搬送回転体まで伝達する二つ目の伝達経路を形成する第二駆動伝達経路と、前記駆動源から前記搬送回転体への駆動伝達経路を、前記第一駆動伝達経路と前記第二駆動伝達経路とで切り替える電磁クラッチ5やトルクリミッタ8などで構成される駆動伝達経路切り替え手段とを備えた駆動装置30などの駆動装置において、前記搬送回転体による一つの搬送対象物の搬送中に、前記駆動伝達経路切り替え手段による駆動伝達経路の切り替えを少なくとも二回以上行う。
(態様A)においては、搬送回転体による一つの搬送対象物の搬送中に、駆動源から搬送回転体への駆動伝達経路を第一駆動伝達経路と第二駆動伝達経路とで交互に繰り返し切り替えて、搬送回転体を正回転と逆回転とに交互で回転させる。これにより、搬送回転体によって搬送させる搬送対象物を、搬送経路の所定範囲内で進めたり戻したりして留まらせることができる。よって、新たな手法により、搬送回転体で搬送させる搬送対象物を搬送経路内で待機させことができる。
(態様B)
(態様A)において、前記駆動伝達経路切り替え手段は、前記第一駆動伝達経路と前記第二駆動伝達経路とのうちの一方の駆動伝達経路に対して、駆動力を伝達する駆動伝達状態と、駆動力を遮断する駆動遮断状態とを切り替える電磁クラッチ5などの駆動伝達切り替え手段と、前記一方の駆動伝達経路が前記駆動遮断状態のときに、前記第一駆動伝達経路と前記第二駆動伝達経路との前記二系統の駆動伝達経路のうちの他方の駆動伝達経路から前記搬送回転体への駆動力の伝達を許容し、前記一方の駆動伝達経路が前記駆動伝達状態のときに前記他方の駆動伝達経路から前記搬送回転体への駆動伝達を制限するトルクリミッタ8などの駆動伝達許容制限変更手段とを有する。これによれば、上記実施形態について説明したように、駆動源をOFFさせることなく、搬送回転体で搬送される搬送対象物を搬送経路内で待機させることができる。
(態様C)
(態様A)において、前記第一駆動伝達経路及び前記第二駆動伝達経路は、駆動力を伝達する状態と駆動力の伝達を遮断する状態とを切り替え可能な第一クラッチ7や第二クラッチ9などの駆動伝達切り替え手段をそれぞれ有しており、前記駆動伝達経路切り替え手段は、前記第一駆動伝達経路と前記第二駆動伝達経路それぞれの前記駆動伝達切り替え手段を制御して、該第一駆動伝達経路または該第二駆動伝達経路から選択的に前記搬送回転体への駆動伝達経路を切り替える。これによれば、上記実施形態について説明したように、駆動源をOFFさせることなく、搬送対象物を確実に待機させることができる。
(態様D)
(態様A)において、前記第一駆動伝達経路は、前記駆動源から入力される回転駆動力を前記搬送回転体まで伝達する第一排紙ギヤ列310などの第一ギヤ列であり、前記第二駆動伝達経路は、前記駆動源から入力される回転駆動力を前記第一ギヤ列に対して逆回転の回転駆動力として前記搬送回転体まで伝達する第二排紙ギヤ列320などの第二ギヤ列であり、前記第一ギヤ列の一部を構成する位置となる第一駆動伝達位置と、前記第二ギヤ列の一部を構成する位置となる第二駆動伝達位置と、の間を移動可能な切替ギヤ303などの位置可変ギヤを備えており、前記駆動伝達経路切り替え手段は、前記位置可変ギヤを前記第一駆動伝達位置と前記第二駆動伝達位置との間で移動させて駆動伝達経路を切り替える。これによれば、上記実施形態について説明したように、駆動源をOFFさせることなく、搬送対象物を用紙を搬送経路で待機させることができる。
(態様E)
(態様A)乃至(態様D)のいずれかにおいて、搬送対象物を検知する用紙検知センサ101などの搬送対象物検知手段を有しており、前記駆動伝達経路切り替え切り替え手段は、前記駆動伝達経路の一回目の切り替え時にのみ前記搬送対象物検知手段の検知結果に基づいて該駆動伝達経路の切り替えを行う。これによれば、上記実施形態について説明したように、搬送対象物検知手段の数を減らせる分、低コスト化を図ることが可能となる。
(態様F)
(態様A)乃至(態様D)のいずれかにおいて、搬送対象物を検知する用紙検知センサ101,102などの搬送対象物検知手段を有しており、前記駆動伝達経路切り替え手段は、前記搬送対象物検知手段による検知結果に基づいて前記駆動伝達経路を切り替える。これによれば、上記実施形態について説明したように、搬送中に搬送対象物の位置を正確に把握することができる。
(態様G)
(態様A)乃至(態様D)のいずれかにおいて、前記駆動伝達経路切り替え手段による駆動伝達経路の切り替え間隔を同じにする。これによれば、上記実施形態について説明したように、待機中の搬送対象物の挙動を同じに制御することができる。
(態様H)
(態様A)乃至(態様G)のいずれかにおいて、前記駆動伝達経路切り替え手段による駆動伝達経路の切り替え間隔を100[msec]以下にする。これによれば、上記実施形態について説明したように、待機中の搬送対象物の動きを最小限に抑えることができる。
(態様I)
(態様B)、(態様E)乃至(態様H)のいずれかにおいて、前記駆動源から駆動力が入力される回転可能な入力側回転部材と、前記搬送回転体に駆動力を出力する回転可能な出力側回転部材とを有し、前記第一駆動伝達経路または前記第二駆動伝達経路を介して、前記入力側回転部材から前記出力側回転部材に駆動力が伝達されるように構成されており、前記入力側回転部材を回転可能に支持する入力側回転軸上に前記駆動伝達切り替え手段を設けた。これによれば、上記実施形態について説明したように、入力側回転軸を別の駆動力に使用することが可能となる。
(態様J)
(態様B)、(態様E)乃至(態様H)のいずれかにおいて、前記駆動源から駆動力が入力される回転可能な入力側回転部材と、前記搬送回転体に駆動力を出力する回転可能な出力側回転部材とを有し、前記第一駆動伝達経路または前記第二駆動伝達経路を介して、前記入力側回転部材から前記出力側回転部材に駆動力が伝達されるように構成されており、前記出力側回転部材を回転可能に支持する出力側回転軸上に、前記駆動伝達切り替え手段と前記駆動伝達許容制限変更手段とを設けた。これによれば、上記実施形態について説明したように、駆動伝達切り替え手段と、駆動伝達許容制限変更手段とを一つの軸に取り付けることができるため、駆動伝達切り替え手段の交換性が良い。
(態様K)
(態様B)、(態様E)乃至(態様J)のいずれかにおいて、前記駆動伝達許容制限変更手段は、予め定められたトルク設定値以上のトルクを受けたときに駆動伝達を遮断するトルク制限手段であり、前記トルク設定値が、前記搬送回転体の駆動トルクよりも高く、かつ、前記駆動伝達切り替え手段の伝達トルクよりも低い。これによれば、上記実施形態について説明したように、駆動伝達切り替え手段からの駆動力によって被駆動体を駆動させることが可能となる。
(態様L)
(態様K)において、前記トルク制限手段が、前記トルク設定値以上のトルクを受けたときに空転するトルクリミッタである。これによれば、簡単な構成で駆動の伝達と遮断とを変更することができる。
(態様M)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、一方はベルト部材を用いて駆動伝達を行うように構成しており、他方は外歯ギヤのみで駆動伝達を行うように構成した。これによれば、上記実施形態について説明したように、ベルト部材を用いた駆動伝達経路は、ギヤを用いた場合に比べて、高速域での静音性に優れている。したがって、複数の駆動伝達経路の前記一方をベルト部材を用いて駆動伝達を行うように構成することで、ギヤを用いる場合に比べて、静音化を図ることができる。また、外歯ギヤは、ベルト部材に比べて耐久性が高い。したがって、複数の駆動伝達経路の前記他方を外歯ギヤのみで駆動伝達を行うように構成することによって、その駆動伝達経路の耐久性を高めることができる。
(態様N)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、駆動時間が短いまたは使用頻度が少ないほうの駆動伝達経路に、前記駆動伝達切り替え手段を設けた。これによれば、上記実施形態について説明したように、消費電力の低減や高耐久性を図ることができる。
(態様O)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路それぞれの前記駆動伝達切り替え手段を同一の回転軸に取り付けた。これによれば、上記実施形態について説明したように、互いに異なる回転軸に駆動伝達切り替え手段を取り付けた構成に比べて、駆動装置が搭載される装置の小型化を図ることができる。
(態様P)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路それぞれの前記駆動伝達切り替え手段を異なる回転軸に取り付ける構成を採用することが可能である。
(態様Q)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、少なくとも駆動伝達経路への負荷変動が最も大きい駆動伝達経路を、ベルトを用いて駆動伝達を行うように構成した。これによれば、上記実施形態について説明したように、駆動伝達時に負荷変動が発生したとき、ベルトが弾性変形することにより負荷を吸収することができる。よって、駆動伝達切り替え手段により駆動力の伝達を遮断した状態から、駆動力を伝達する状態へと切り替えたときの衝撃などにより、駆動伝達経路を構成する駆動伝達部材が破損したりするのを抑制することができる。
(態様R)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路とのうち少なくとも一つは、外歯ギヤのみで構成した。これによれば、上記実施形態について説明したように、その駆動伝達経路の耐久性を高めることができる。
(態様S)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記駆動伝達切り替え手段に設けられた駆動伝達部材は、径方向に隣接する駆動伝達部材に接続されている。これによれば、上記実施形態について説明したように、径方向に隣接する駆動伝達部材から伝達される駆動力を、駆動伝達切り替え手段により遮断したり、回転軸に伝達したりすることができる。
(態様T)
(態様S)において、前記駆動伝達切り替え手段は、前記駆動伝達部材と軸方向で連結するものであり、前記駆動伝達部材は、前記駆動伝達切り替え手段との連結方向にスラスト力が働くはす歯ギヤである。これによれば、上記実施形態について説明したように、駆動伝達部材を、駆動伝達切り替え手段の連結部に接触させることができ、駆動力の伝達を遮断した状態から、駆動力を伝達する状態へと切り替えたとき、タイムラグがほとんどなく、駆動伝達部材と連結することができる。
(態様U)
(態様B)、(態様C)、(態様E)乃至(態様L)のいずれかにおいて、前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、少なくとも一つはベルトを用いて駆動伝達を行う駆動伝達経路であり、前記ベルトを用いて駆動伝達を行う駆動伝達経路の前記駆動伝達切り替え手段の駆動力の伝達を遮断する状態から駆動力を伝達する状態に切り替えるタイミングを、ベルトを用いずに駆動伝達を行う駆動伝達経路の駆動伝達切り替え手段の駆動力の伝達を遮断する状態から駆動力を伝達する状態に切り替えるタイミングに比べて早くした。これによれば、上記実施形態について説明したように、ベルトを用いて駆動伝達を行う駆動伝達経路を介して駆動力が伝達される際の、駆動開始遅れを防止することができる。
(態様V)
(態様C)、(態様E)乃至(態様U)のいずれかにおいて、前記駆動伝達切り替え手段を制御する制御手段に接続する各駆動伝達切り替え手段の接続コネクタに、どの駆動伝達経路の駆動伝達切り替え手段の接続コネクタであるのかを識別するための識別手段を設けた。これによれば、接続コネクタの誤接続を抑制することができる。
(態様W)
(態様C)、(態様E)乃至(態様V)のいずれかにおいて、各駆動伝達経路の駆動伝達切り替え手段を、同一形状とした。これによれば、上記実施形態について説明したように、劣化の進行が早い駆動伝達経路の駆動伝達切り替え手段と、劣化の進行が遅い駆動伝達経路の駆動伝達切り替え手段とを定期的に入れ替えることができ、駆動伝達切り替え手段の寿命を延ばすことが可能となる。
(態様X)
(態様B)、(態様C)、(態様E)乃至(態様W)のいずれかにおいて、前記駆動伝達切り替え手段が、電磁クラッチである。これによれば、上記実施形態について説明したように、電磁クラッチのONとOFFで、駆動力を伝達する状態と、駆動力の伝達を遮断する状態とを切り替えることが可能となる。
(態様Y)
(態様X)において、前記電磁クラッチとプーリとが別体で同じ軸に対して保持されている。これによれば、プーリの取り付け精度が向上するため、搬送回転体の回転精度を向上させることができる。また、電磁クラッチの耐久性を向上させることができる。
(態様Z)
画像を形成する画像形成手段と、被駆動体に駆動力を伝達させて駆動させる駆動手段とを備えた画像形成装置において、前記駆動手段として、(態様A)乃至(態様Y)のいずれか一記載の駆動装置を用いた。これによれば、上記実施形態について説明したように、駆動源をOFFすることなく、搬送対象物搬送経路中の所望の位置で搬送対象物を待機させて画像形成を行うことができる。
1a モータギヤ
2 アイドラギヤ
2a ギヤ部
2b プーリ部
3 外歯ギヤ
4 回転軸
4a 固定ピン
5 電磁クラッチ
5a 駆動爪
5b アーマチュア
5c ロータ部
5d 電磁コイル部
5e 軸固定部
5f 駆動連結部材
6 プーリ
6a 嵌合穴
8 トルクリミッタ
8a 駆動爪
9 入力プーリ
10 タイミングベルト
11 プーリ
12 固定軸
13 アイドラギヤプーリ
13a 外歯ギヤ部
13b プーリ部
14 固定軸
15 固定軸
16 回転軸
17 タイミングベルト
18 プーリ
19 回転軸
19a 固定ピン
19b 固定ピン
19c 固定ピン
21 伝達ギヤ
24 感光体
25 駆動アイドラギヤ
26 外歯ギヤ
27 外歯ギヤ
29 出力ギヤ
30 駆動装置
31 側板
31a 軸受
31b 軸受
32 側板
32a 軸受
32b 軸受
32c 軸受
32d 軸受
32e 軸受
32f 軸受
33 側板
40 定着装置
41 給紙カセット
42 給紙ローラ
43 レジストローラ
43a 回転軸
44 レジストローラ
45 定着ローラ
45a 回転軸
45b ギヤ部
47 加圧ローラ
56 スタック部
60 プロセスユニット
61 感光体
62 現像装置
62a 現像ローラ
63 帯電装置
64 ドラムクリーニング装置
65 光書込ユニット
70 ベルトクリーニング装置
71 コネクタ
72 クリーニングバックアップローラ
74 一次転写ローラ
75 転写ユニット
76 駆動ローラ
77 テンションローラ
78 二次転写ローラ
79 中間転写ベルト
81 コネクタ
91 コネクタ
101 用紙検知センサ
102 用紙検知センサ
103 入力部材
103a 入力ギヤ部
103b 入力プーリ部
104 モータ出力部材
104a モータ出力プーリ部
104b アイドラギヤ部
105 駆動入力部材
105a 駆動ギヤ部
105b 入力ギヤ部
106 出力プーリ
106a 嵌合穴
107 第一クラッチ
107a 駆動爪
107b アーマチュア
107c ロータ部
107d 電磁コイル部
107e 軸固定部
107f 駆動連結部材
108 第二クラッチ
109 第二クラッチ
109a 嵌合穴
109b アーマチュア
109c ロータ部
109d 電磁コイル部
109e 軸固定部
110 回転軸
112 モータ入力部材
112a モータ入力ギヤ部
112b モータ入力プーリ部
113 タイミングベルト
115 タイミングベルト
116 出力ギヤ
116a 嵌合穴
120 駆動ギヤ
120a 駆動入力ギヤ部
120b 駆動出力ギヤ部
121 定着ギヤ
122 駆動ギヤ
123 駆動ギヤ
123a 第一ギヤ部
123b 第二ギヤ部
130 回転軸
131 内歯ギヤ
132 回転軸
133 駆動ギヤ
133a ギヤ部
133b プーリ部
134 タイミングベルト
135 伝達ギヤ
136 回転軸
137 伝達ギヤ
137a 第一ギヤ部
137b 第二ギヤ部
138 回転軸
139 レジストギヤ
140 電磁クラッチ
141 給紙ギヤ
142 電磁クラッチ
143 回転軸
161 排紙ローラ対
161a 排紙ローラ
161b 排紙ローラ
170 再給紙路
200 制御部
301 駆動ギヤ
301a 第一ギヤ部
301b 第二ギヤ部
302 伝達ギヤ
303 切替ギヤ
304 排紙ギヤ
305 伝達ギヤ
310 第一排紙ギヤ列
311 第一ギヤ列上流ギヤ
312 第一ギヤ列下流ギヤ
320 第二排紙ギヤ列
321 第二ギヤ列上流ギヤ
322 第二ギヤ列中央ギヤ
323 第二ギヤ列下流ギヤ
331 側板
332 側板
332a 軸受
332c 軸受
341 固定軸
342 回転軸
342a 固定ピン
342b 固定ピン
343 回転軸
344 回転軸
345 回転軸
346 回転軸
347 回転軸
348 回転軸
350 ソレノイド
351 プランジャ
352 リンク部材
Claims (25)
- 画像を形成する画像形成部と、
前記画像形成部を通過した搬送対象物を反転させて前記画像形成部に再度搬送する搬送路と、
駆動源と、
前記駆動源から入力される回転駆動力を、前記搬送対象物を搬送する搬送回転体まで伝達する一つ目の伝達経路を形成する第一駆動伝達経路と、
前記駆動源から入力される回転駆動力を前記第一駆動伝達経路に対して逆回転の回転駆動力として前記搬送回転体まで伝達する二つ目の伝達経路を形成する第二駆動伝達経路と、
前記駆動源から前記搬送回転体への駆動伝達経路を、前記第一駆動伝達経路と前記第二駆動伝達経路とで切り替える駆動伝達経路切り替え手段とを備えた駆動装置とを備えた画像形成装置において、
前記搬送回転体により一つの搬送対象物を前記搬送路に搬送する際に、前記駆動伝達経路切り替え手段による駆動伝達経路の切り替えを少なくとも二回以上行うことを特徴とする画像形成装置。 - 請求項1に記載の画像形成装置において、
前記駆動伝達経路切り替え手段は、
前記第一駆動伝達経路と前記第二駆動伝達経路とのうちの一方の駆動伝達経路に対して、駆動力を伝達する駆動伝達状態と、駆動力を遮断する駆動遮断状態とを切り替える駆動伝達切り替え手段と、
前記一方の駆動伝達経路が前記駆動遮断状態のときに、前記第一駆動伝達経路と前記第二駆動伝達経路との二系統の駆動伝達経路のうちの他方の駆動伝達経路から前記搬送回転体への駆動力の伝達を許容し、前記一方の駆動伝達経路が前記駆動伝達状態のときに前記他方の駆動伝達経路から前記搬送回転体への駆動伝達を制限する駆動伝達許容制限変更手段とを有することを特徴とする画像形成装置。 - 請求項1に記載の画像形成装置において、
前記第一駆動伝達経路及び前記第二駆動伝達経路は、駆動力を伝達する状態と駆動力の伝達を遮断する状態とを切り替え可能な駆動伝達切り替え手段をそれぞれ有しており、
前記駆動伝達経路切り替え手段は、前記第一駆動伝達経路と前記第二駆動伝達経路それぞれの前記駆動伝達切り替え手段を制御して、該第一駆動伝達経路または該第二駆動伝達経路から選択的に前記搬送回転体への駆動伝達経路を切り替えることを特徴とする画像形成装置。 - 請求項1に記載の画像形成装置において、
前記第一駆動伝達経路は、前記駆動源から入力される回転駆動力を前記搬送回転体まで伝達する第一ギヤ列であり、
前記第二駆動伝達経路は、前記駆動源から入力される回転駆動力を前記第一ギヤ列に対して逆回転の回転駆動力として前記搬送回転体まで伝達する第二ギヤ列であり、
前記第一ギヤ列の一部を構成する位置となる第一駆動伝達位置と、前記第二ギヤ列の一部を構成する位置となる第二駆動伝達位置と、の間を移動可能な位置可変ギヤを備えており、
前記駆動伝達経路切り替え手段は、前記位置可変ギヤを前記第一駆動伝達位置と前記第二駆動伝達位置との間で移動させて駆動伝達経路を切り替えることを特徴とする画像形成装置。 - 請求項1乃至4のいずれか一記載の画像形成装置において、
搬送対象物を検知する搬送対象物検知手段を有しており、
前記駆動伝達経路切り替え手段は、前記駆動伝達経路の一回目の切り替え時にのみ前記搬送対象物検知手段の検知結果に基づいて該駆動伝達経路の切り替えを行うことを特徴とする画像形成装置。 - 請求項1乃至4のいずれか一記載の画像形成装置において、
搬送対象物を検知する搬送対象物検知手段を有しており、
前記駆動伝達経路切り替え手段は、前記搬送対象物検知手段による検知結果に基づいて前記駆動伝達経路を切り替えることを特徴とする画像形成装置。 - 請求項1乃至6のいずれか一記載の画像形成装置において、
前記駆動伝達経路切り替え手段による駆動伝達経路の切り替え間隔を同じにすることを特徴とする画像形成装置。 - 請求項1乃至7のいずれか一記載の画像形成装置において、
前記駆動伝達経路切り替え手段による駆動伝達経路の切り替え間隔を100[msec]以下にすることを特徴とする画像形成装置。 - 請求項2に記載の画像形成装置において、
前記駆動源から駆動力が入力される回転可能な入力側回転部材と、
前記搬送回転体に駆動力を出力する回転可能な出力側回転部材とを有し、
前記第一駆動伝達経路または前記第二駆動伝達経路を介して、前記入力側回転部材から前記出力側回転部材に駆動力が伝達されるように構成されており、
前記入力側回転部材を回転可能に支持する入力側回転軸上に前記駆動伝達切り替え手段を設けたことを特徴とする画像形成装置。 - 請求項2に記載の画像形成装置において、
前記駆動源から駆動力が入力される回転可能な入力側回転部材と、
前記搬送回転体に駆動力を出力する回転可能な出力側回転部材とを有し、
前記第一駆動伝達経路または前記第二駆動伝達経路を介して、前記入力側回転部材から前記出力側回転部材に駆動力が伝達されるように構成されており、
前記出力側回転部材を回転可能に支持する出力側回転軸上に、前記駆動伝達切り替え手段と前記駆動伝達許容制限変更手段とを設けたことを特徴とする画像形成装置。 - 請求項2、9、10のいずれか一記載の画像形成装置において、
前記駆動伝達許容制限変更手段は、予め定められたトルク設定値以上のトルクを受けたときに駆動伝達を遮断するトルク制限手段であり、前記トルク設定値が、前記搬送回転体の駆動トルクよりも高く、かつ、前記駆動伝達切り替え手段の伝達トルクよりも低いことを特徴とする画像形成装置。 - 請求項11に記載の画像形成装置において、
前記トルク制限手段が、前記トルク設定値以上のトルクを受けたときに空転するトルクリミッタであることを特徴とする画像形成装置。 - 請求項2、3、5乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、一方はベルト部材を用いて駆動伝達を行うように構成しており、他方は外歯ギヤのみで駆動伝達を行うように構成したことを特徴とする画像形成装置。 - 請求項2、3、9乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、駆動時間が短いまたは使用頻度が少ないほうの駆動伝達経路に、前記駆動伝達切り替え手段を設けたことを特徴とする画像形成装置。 - 請求項2、3、9乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路それぞれの前記駆動伝達切り替え手段を同一の回転軸に取り付けたことを特徴とする画像形成装置。 - 請求項2、3、9乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路それぞれの前記駆動伝達切り替え手段を異なる回転軸に取り付けたことを特徴とする画像形成装置。 - 請求項2、3、5乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、少なくとも駆動伝達経路への負荷変動が最も大きい駆動伝達経路を、ベルトを用いて駆動伝達を行うように構成したことを特徴とする画像形成装置。 - 請求項2、3、5乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路とのうち少なくとも一つは、外歯ギヤのみで構成したことを特徴とする画像形成装置。 - 請求項2、3、9乃至12のいずれか一記載の画像形成装置において、
前記駆動伝達切り替え手段に設けられた駆動伝達部材は、径方向に隣接する駆動伝達部材に接続されていることを特徴とする画像形成装置。 - 請求項19に記載の画像形成装置において、
前記駆動伝達切り替え手段は、前記駆動伝達部材と軸方向で連結するものであり、
前記駆動伝達部材は、前記駆動伝達切り替え手段との連結方向にスラスト力が働くはす歯ギヤであることを特徴とする画像形成装置。 - 請求項2、3、9乃至12のいずれか一記載の画像形成装置において、
前記第一駆動伝達経路と前記第二駆動伝達経路とのうち、少なくとも一つはベルトを用いて駆動伝達を行う駆動伝達経路であり、
前記ベルトを用いて駆動伝達を行う駆動伝達経路の前記駆動伝達切り替え手段の駆動力の伝達を遮断する状態から駆動力を伝達する状態に切り替えるタイミングを、ベルトを用いずに駆動伝達を行う駆動伝達経路の駆動伝達切り替え手段の駆動力の伝達を遮断する状態から駆動力を伝達する状態に切り替えるタイミングに比べて早くしたことを特徴とする画像形成装置。 - 請求項3に記載の画像形成装置において、
前記駆動伝達切り替え手段を制御する制御手段に接続する各駆動伝達切り替え手段の接続コネクタに、どの駆動伝達経路の駆動伝達切り替え手段の接続コネクタであるのかを識別するための識別手段を設けたことを特徴とする画像形成装置。 - 請求項3、22のいずれか一記載の画像形成装置において、
各駆動伝達経路の駆動伝達切り替え手段を、同一形状としたことを特徴とする画像形成装置。 - 請求項2、3、9乃至12のいずれか一記載の画像形成装置において、
前記駆動伝達切り替え手段が、電磁クラッチであることを特徴とする画像形成装置。 - 請求項24に記載の画像形成装置において、
前記電磁クラッチとプーリとが別体で同じ軸に対して保持されていることを特徴とする画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016080606A JP6731181B2 (ja) | 2016-04-13 | 2016-04-13 | 画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016080606A JP6731181B2 (ja) | 2016-04-13 | 2016-04-13 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017190223A JP2017190223A (ja) | 2017-10-19 |
| JP2017190223A5 JP2017190223A5 (ja) | 2019-03-22 |
| JP6731181B2 true JP6731181B2 (ja) | 2020-07-29 |
Family
ID=60085676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016080606A Active JP6731181B2 (ja) | 2016-04-13 | 2016-04-13 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6731181B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023107565A (ja) | 2022-01-24 | 2023-08-03 | 株式会社リコー | 駆動伝達装置、駆動ユニット及び画像形成装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2549070Y2 (ja) * | 1991-10-15 | 1997-09-24 | 株式会社リコー | 正転逆転制御機構 |
| JP3367317B2 (ja) * | 1996-01-31 | 2003-01-14 | 富士ゼロックス株式会社 | 画像形成装置 |
| JPH11334963A (ja) * | 1998-05-26 | 1999-12-07 | Nikon Corp | 排紙機構 |
| JP3860532B2 (ja) * | 2002-01-10 | 2006-12-20 | 株式会社リコー | 折り装置、用紙処理装置および画像形成システム |
| JP2004156746A (ja) * | 2002-11-07 | 2004-06-03 | Ricoh Co Ltd | 駆動伝達装置及びそれを用いた画像形成装置 |
| JP2009132505A (ja) * | 2007-11-30 | 2009-06-18 | Panasonic Corp | 用紙搬送装置及びそれを備えた画像形成装置 |
| JP5538875B2 (ja) * | 2009-12-25 | 2014-07-02 | キヤノン株式会社 | 画像形成装置 |
| JP6205916B2 (ja) * | 2013-07-09 | 2017-10-04 | ブラザー工業株式会社 | 画像形成装置 |
| JP6184280B2 (ja) * | 2013-09-30 | 2017-08-23 | キヤノン株式会社 | 駆動力切替機構及び画像形成装置 |
-
2016
- 2016-04-13 JP JP2016080606A patent/JP6731181B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017190223A (ja) | 2017-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5022834B2 (ja) | 画像形成装置 | |
| US10474091B2 (en) | Drive device and image forming apparatus incorporating the drive device | |
| US8565646B2 (en) | Gear system with transmission pathways for an image forming apparatus | |
| JP5081577B2 (ja) | 画像形成装置 | |
| JP5925080B2 (ja) | シート給送装置及び画像形成装置 | |
| JP2012058377A (ja) | ベルト装置、転写ベルト装置及び画像形成装置 | |
| JP6731181B2 (ja) | 画像形成装置 | |
| JP6156719B2 (ja) | 画像形成装置 | |
| JP6677928B2 (ja) | 駆動装置及び画像形成装置 | |
| JP6741231B2 (ja) | 駆動装置及び画像形成装置 | |
| JP4950654B2 (ja) | 画像形成装置 | |
| US7272350B2 (en) | Method for positioning transfer members within an image forming apparatus | |
| JP6635351B2 (ja) | 駆動伝達装置、駆動装置および画像形成装置 | |
| JP6697710B2 (ja) | 速度切替装置、駆動装置および画像形成装置 | |
| JP2017116705A (ja) | 画像形成装置 | |
| JP4655686B2 (ja) | 現像装置、及び画像形成装置 | |
| US11378895B2 (en) | Image forming apparatus with developing roller separation processing | |
| JP4572178B2 (ja) | 画像形成装置 | |
| JP7313962B2 (ja) | 駆動装置および画像形成装置 | |
| JP4656600B2 (ja) | 画像形成装置 | |
| JP6919829B2 (ja) | 駆動装置および画像形成装置 | |
| US9725258B2 (en) | Image forming device | |
| JP2007078795A (ja) | 画像形成装置 | |
| JP2004258074A (ja) | 画像形成装置 | |
| JP2020101826A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190208 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191227 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200618 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6731181 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |