JP6725645B2 - ロボットアーム機構 - Google Patents
ロボットアーム機構 Download PDFInfo
- Publication number
- JP6725645B2 JP6725645B2 JP2018509286A JP2018509286A JP6725645B2 JP 6725645 B2 JP6725645 B2 JP 6725645B2 JP 2018509286 A JP2018509286 A JP 2018509286A JP 2018509286 A JP2018509286 A JP 2018509286A JP 6725645 B2 JP6725645 B2 JP 6725645B2
- Authority
- JP
- Japan
- Prior art keywords
- cylindrical body
- unit
- robot arm
- frame
- joint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/025—Arms extensible telescopic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0258—Two-dimensional joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/02—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion
- F16H19/06—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member
- F16H19/0636—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member the flexible member being a non-buckling chain
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/02—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion
- F16H19/06—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member
- F16H19/0645—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member the flexible push or pull member having guiding means, i.e. the flexible member being supported at least partially by a guide to transmit the reciprocating movement
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H19/00—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion
- F16H19/02—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion
- F16H19/06—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member
- F16H19/0663—Gearings comprising essentially only toothed gears or friction members and not capable of conveying indefinitely-continuing rotary motion for interconverting rotary or oscillating motion and reciprocating motion comprising flexible members, e.g. an endless flexible member with telescopic means, e.g. for supporting or shielding the reciprocating member
Description
Claims (3)
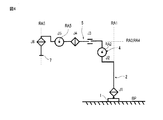
- 基台に旋回回転関節部を備えた支柱部が支持され、前記支柱部上には起伏回転関節部を備えた起伏部が載置され、前記起伏部には直動伸縮性のアーム部を備えた直動伸縮機構が設けられ、前記アーム部の先端にはエンドエフェクタを装着可能な手首部が装備され、前記手首部には前記エンドエフェクタの姿勢を変更するための少なくとも一の回転関節部が装備されてなるロボットアーム機構において、
前記アーム部は、
屈曲可能に連結された板形状の複数の第1コマと、
底面側において屈曲可能に連結された横断面コ字又はロ字形状の複数の第2コマと、前記第2コマは前記底面側と反対の表面側に前記第1コマが接合されたとき前記第1、第2コマはその屈曲が拘束され硬直された柱状体に構成される、前記第1、第2コマは互いに分離されたとき屈曲状態に復帰される、とからなり、
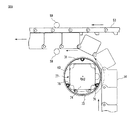
前記起伏部は、
前記旋回回転関節部の回転部に載置された一対のサイドフレームと、
前記サイドフレームに軸回転自在に支持された円筒体と、
前記円筒体を回転駆動するためのモータとギアボックスを含むモータユニットと、
前記アーム部を移動自在に支持する前記直動伸縮機構のアーム支持部と接続するための接続部と、
前記第1コマから分離された前記第2コマを前記支柱部内に誘導するガイド構造とを有し、
前記モータユニット、前記接続部及び前記ガイド構造は前記円筒体に一体化されていて、
前記モータユニットは前記円筒体の内部に収納され、前記モータユニットの出力軸は前記サイドフレームの一方に接続され、
前記接続部は前記円筒体の外周面に固定され、
前記ガイド構造は前記円筒体の外周面に設けられる円環体であることを特徴とするロボットアーム機構。 - 前記円環体は前記円筒体に自由回転自在に支持されることを特徴とする請求項1記載のロボットアーム機構。
- 前記円環体は前記第2コマを滑動させる前記円筒体の外周面に装着された滑動ベルトであることを特徴とする請求項1記載のロボットアーム機構。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016066897 | 2016-03-29 | ||
| JP2016066897 | 2016-03-29 | ||
| PCT/JP2017/012209 WO2017170303A1 (ja) | 2016-03-29 | 2017-03-26 | ロボットアーム機構及び回転関節装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017170303A1 JPWO2017170303A1 (ja) | 2019-02-07 |
| JP6725645B2 true JP6725645B2 (ja) | 2020-07-22 |
Family
ID=59964424
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018509286A Active JP6725645B2 (ja) | 2016-03-29 | 2017-03-26 | ロボットアーム機構 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10800047B2 (ja) |
| JP (1) | JP6725645B2 (ja) |
| CN (1) | CN108883539B (ja) |
| DE (1) | DE112017001656B4 (ja) |
| TW (1) | TW201733751A (ja) |
| WO (1) | WO2017170303A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017094631A1 (ja) * | 2015-11-30 | 2017-06-08 | ライフロボティクス株式会社 | 直動伸縮機構 |
| JP6703091B2 (ja) * | 2016-02-29 | 2020-06-03 | ライフロボティクス株式会社 | 直動伸縮機構及びそれを備えたロボットアーム機構 |
| DE112017001033T5 (de) * | 2016-02-29 | 2019-01-03 | Life Robotics Inc. | Roboterarmmechanismus und linearer aus- und einfahrmechanismus |
| JP6725645B2 (ja) * | 2016-03-29 | 2020-07-22 | ライフロボティクス株式会社 | ロボットアーム機構 |
| JP6773768B2 (ja) * | 2016-03-29 | 2020-10-21 | ライフロボティクス株式会社 | ねじり回転関節機構及びロボットアーム機構 |
| CN110978050A (zh) * | 2019-12-30 | 2020-04-10 | 中国科学院沈阳自动化研究所 | 一种可折叠伸缩的空间机械臂 |
| JP7314857B2 (ja) * | 2020-04-30 | 2023-07-26 | トヨタ自動車株式会社 | 伸縮機構及び移動体 |
| US11787069B2 (en) * | 2021-11-01 | 2023-10-17 | Oliver Crispin Robotics Limited | Insertion tool with flexible spine |
Family Cites Families (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5435679A (en) | 1977-08-25 | 1979-03-15 | Toshiba Corp | Semiconductor connection method |
| JPS58120490A (ja) * | 1982-01-08 | 1983-07-18 | 住友電気工業株式会社 | ロボツトの関節構造 |
| DE8430397U1 (de) * | 1984-10-16 | 1986-05-28 | Manutec Gesellschaft für Automatisierungs- und Handhabungssysteme mbH, 8510 Fürth | Robotergelenkmechanismus |
| DE3522336A1 (de) * | 1985-06-22 | 1987-01-02 | Bosch Gmbh Robert | Robotergelenk mit einem elektrischen antriebsmotor |
| US5355743A (en) * | 1991-12-19 | 1994-10-18 | The University Of Texas At Austin | Robot and robot actuator module therefor |
| US5293107A (en) * | 1993-02-24 | 1994-03-08 | Fanuc Robotics North America, Inc. | Motorized rotary joint and method of constructing a modular robot utilizing same |
| US5523662A (en) * | 1994-05-02 | 1996-06-04 | Engineering Services, Inc. | Modular, expandable and reconfigurable robot |
| GB9713765D0 (en) * | 1997-07-01 | 1997-09-03 | Engineering Services Inc | Reconfigurable mudular drive system |
| DE10063149C1 (de) * | 2000-12-18 | 2002-06-06 | Kubein Meesenburg Dietmar | Statische Gelenkkette |
| SE0202445L (sv) * | 2002-08-19 | 2004-02-20 | Abb Ab | Anordning vid en industrirobot |
| US8175747B2 (en) * | 2003-12-22 | 2012-05-08 | Irobou Co., Ltd. | Joinable robot component for robot toy, modifiable robot toy using the joinable robot components, and control method thereof |
| EP1930129A4 (en) * | 2005-09-27 | 2008-11-19 | Yaskawa Denki Seisakusho Kk | MANIPULATOR WITH MULTIPLE RACES |
| EP2375104B1 (en) | 2008-12-19 | 2013-04-24 | Kawabuchi Mechanical Engineering Laboratory, Inc. | Linearly moving extendable mechanism and robot arm equipped with linearly moving extendable mechanism |
| US8425620B2 (en) * | 2009-12-08 | 2013-04-23 | Hdt Engineering Services, Inc. | Modular limb segment connector |
| CN102791439A (zh) * | 2010-02-05 | 2012-11-21 | 加利福尼亚大学董事会 | 四自由度(4-dof)单个模块化机器人单元或关节 |
| WO2011152265A1 (ja) | 2010-05-31 | 2011-12-08 | 独立行政法人産業技術総合研究所 | 直動伸縮アーム機構および当該直動伸縮アーム機構を備えたロボットアーム |
| JP2012223081A (ja) * | 2011-04-14 | 2012-11-12 | Jtekt Corp | 電動アクチュエータ及び関節装置 |
| US9321172B2 (en) * | 2011-05-13 | 2016-04-26 | Hdt Expeditionary Systems, Inc. | Modular rotational electric actuator |
| CN202185919U (zh) * | 2011-08-15 | 2012-04-11 | 中国科学院沈阳自动化研究所 | 用于搭建水下电动机械手的驱动模块 |
| US9358687B2 (en) * | 2013-01-24 | 2016-06-07 | Mohammad Reza Emami | System, method and computer program for autonomously emulating robot manipulators of continuously-varying configurations |
| CN103624799A (zh) * | 2013-04-03 | 2014-03-12 | 广州市帏腾自动化设备有限责任公司 | 机械手臂伸出机构 |
| US9297712B2 (en) * | 2013-07-03 | 2016-03-29 | Goodrich Corporation | Integral housing load cell system and apparatus |
| JP2015074036A (ja) * | 2013-10-07 | 2015-04-20 | Thk株式会社 | アクチュエータ及びこのアクチュエータを組み込んだロボットの関節構造 |
| JP6036679B2 (ja) * | 2013-12-27 | 2016-11-30 | トヨタ自動車株式会社 | ロボットの配線方法 |
| DE102014103164B4 (de) | 2014-03-10 | 2022-05-25 | Baker Hughes Digital Solutions Gmbh | Schubkette mit elastischem Rückenband |
| AU2015227963B2 (en) * | 2014-03-14 | 2017-01-19 | Life Robotics Inc. | Extensible arm mechanism and robot arm |
| JP6508704B2 (ja) * | 2014-11-29 | 2019-05-08 | ライフロボティクス株式会社 | ロボットアーム機構 |
| JP2016120586A (ja) * | 2014-12-25 | 2016-07-07 | ライフロボティクス株式会社 | ロボットシステム及びロボット装置 |
| JP2016124069A (ja) * | 2014-12-27 | 2016-07-11 | ライフロボティクス株式会社 | ロボットアーム機構及び直動伸縮機構 |
| JP2016136059A (ja) * | 2015-01-24 | 2016-07-28 | ライフロボティクス株式会社 | 連結コマ、直動伸縮機構及びロボットアーム機構 |
| JP5980984B1 (ja) * | 2015-04-02 | 2016-08-31 | ファナック株式会社 | アームを揺動させるモータを備えたロボットの関節構造 |
| CN104802164B (zh) * | 2015-05-04 | 2016-03-02 | 安徽华创智能装备有限公司 | 一种六自由度平面关节机器人 |
| JP6605847B2 (ja) * | 2015-06-05 | 2019-11-13 | ライフロボティクス株式会社 | ロボットアーム機構 |
| CN104908031A (zh) * | 2015-06-23 | 2015-09-16 | 泉州市微柏工业机器人研究院有限公司 | 一种多关节工业机械手 |
| CN108350986A (zh) * | 2015-09-11 | 2018-07-31 | 生活机器人学股份有限公司 | 直动伸缩机构 |
| WO2017094631A1 (ja) * | 2015-11-30 | 2017-06-08 | ライフロボティクス株式会社 | 直動伸縮機構 |
| JP6901828B2 (ja) * | 2016-02-26 | 2021-07-14 | 川崎重工業株式会社 | 基板搬送ロボットおよび基板搬送装置 |
| JP6703091B2 (ja) * | 2016-02-29 | 2020-06-03 | ライフロボティクス株式会社 | 直動伸縮機構及びそれを備えたロボットアーム機構 |
| JP6725645B2 (ja) * | 2016-03-29 | 2020-07-22 | ライフロボティクス株式会社 | ロボットアーム機構 |
| CN108884919A (zh) * | 2016-03-29 | 2018-11-23 | 生活机器人学股份有限公司 | 直动伸缩机构及机械臂机构 |
| CN108884918A (zh) * | 2016-03-29 | 2018-11-23 | 生活机器人学股份有限公司 | 直动伸缩机构及机械臂机构 |
| US10035261B2 (en) * | 2016-06-17 | 2018-07-31 | Schaeffler Technologies AG & Co. KG | Actuatable joint for a robotic system having an axial angular contact roller bearing |
-
2017
- 2017-03-26 JP JP2018509286A patent/JP6725645B2/ja active Active
- 2017-03-26 DE DE112017001656.8T patent/DE112017001656B4/de not_active Withdrawn - After Issue
- 2017-03-26 WO PCT/JP2017/012209 patent/WO2017170303A1/ja active Application Filing
- 2017-03-26 CN CN201780020360.XA patent/CN108883539B/zh not_active Withdrawn - After Issue
- 2017-03-29 TW TW106110583A patent/TW201733751A/zh unknown
-
2018
- 2018-09-28 US US16/147,388 patent/US10800047B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2017170303A1 (ja) | 2019-02-07 |
| DE112017001656B4 (de) | 2022-12-22 |
| CN108883539B (zh) | 2021-11-02 |
| CN108883539A (zh) | 2018-11-23 |
| US10800047B2 (en) | 2020-10-13 |
| WO2017170303A1 (ja) | 2017-10-05 |
| TW201733751A (zh) | 2017-10-01 |
| US20190030734A1 (en) | 2019-01-31 |
| DE112017001656T5 (de) | 2018-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6725645B2 (ja) | ロボットアーム機構 | |
| JP6734364B2 (ja) | 直動伸縮機構及びロボットアーム機構 | |
| US8960042B2 (en) | Robot arm assembly | |
| JP6740339B2 (ja) | 直動伸縮機構及びロボットアーム機構 | |
| JP6687720B2 (ja) | 直動伸縮機構 | |
| JP6711911B2 (ja) | 直動伸縮機構 | |
| WO2017150315A1 (ja) | 直動伸縮機構及びそれを備えたロボットアーム機構 | |
| WO2016104807A1 (ja) | ロボットアーム機構及び直動伸縮機構 | |
| WO2016098814A1 (ja) | ロボットアーム機構 | |
| JP6605847B2 (ja) | ロボットアーム機構 | |
| WO2017170304A1 (ja) | ねじり回転関節機構、ロボットアーム機構および片持ち回転機構 | |
| WO2018052143A1 (ja) | 直動伸縮機構及びロボットアーム機構 | |
| JP6725640B2 (ja) | ロボットアーム機構及び直動伸縮機構 | |
| WO2017188406A1 (ja) | 回転関節機構 | |
| JP2020116651A (ja) | 直動機構 | |
| JP2016160963A (ja) | 曲動伸縮機構及びロボットアーム機構 | |
| JP2016168646A (ja) | 直動伸縮機構及びロボットアーム機構 | |
| WO2017150317A1 (ja) | ロボットアーム機構及びストッパ機構 | |
| JP2019111587A (ja) | 関節機構 | |
| JP2019069478A (ja) | ロボットアーム機構及び直動伸縮機構 | |
| JP2016160964A (ja) | 直動伸縮機構及びロボットアーム機構 | |
| WO2017030104A1 (ja) | 回転関節部のカバー装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20190415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200526 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200625 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6725645 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S801 | Written request for registration of abandonment of right |
Free format text: JAPANESE INTERMEDIATE CODE: R311801 |
|
| ABAN | Cancellation due to abandonment | ||
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |