JP6692762B2 - トルクセンサ - Google Patents
トルクセンサ Download PDFInfo
- Publication number
- JP6692762B2 JP6692762B2 JP2017023885A JP2017023885A JP6692762B2 JP 6692762 B2 JP6692762 B2 JP 6692762B2 JP 2017023885 A JP2017023885 A JP 2017023885A JP 2017023885 A JP2017023885 A JP 2017023885A JP 6692762 B2 JP6692762 B2 JP 6692762B2
- Authority
- JP
- Japan
- Prior art keywords
- bridge circuit
- strain sensor
- sensor
- circuit
- output voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005856 abnormality Effects 0.000 claims description 32
- 238000001514 detection method Methods 0.000 claims description 29
- 239000002184 metal Substances 0.000 claims description 10
- 238000006243 chemical reaction Methods 0.000 description 11
- 230000002159 abnormal effect Effects 0.000 description 5
- 239000000470 constituent Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 239000010408 film Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L25/00—Testing or calibrating of apparatus for measuring force, torque, work, mechanical power, or mechanical efficiency
- G01L25/003—Testing or calibrating of apparatus for measuring force, torque, work, mechanical power, or mechanical efficiency for measuring torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/108—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
- G01L5/0042—Force sensors associated with force applying means applying a torque
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0061—Force sensors associated with industrial machines or actuators
- G01L5/0071—Specific indicating arrangements, e.g. of overload
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Human Computer Interaction (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
図1において、トルクセンサ10は、例えば第1構造体11、第2構造体12、梁部としての複数の第3構造体13、第1ブリッジ回路B1、及び第2ブリッジ回路B2を具備している。
=(R1/(R1+R2)−R3/(R3+R4))・Vo …(1)
ここで、
R1は、第1歪センサG1の抵抗値
R2は、第2歪センサG2の抵抗値
R3は、第3歪センサG3の抵抗値
R4は、第4歪センサG4の抵抗値
であり、トルクセンサ10にトルクが印加されていない状態において、R1=R2=R3=R4=Rである。
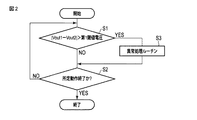
図2、図3は、コントローラ19の動作を説明するためのフローチャートである。
第1の実施形態において、第1ブリッジ回路B1と第2ブリッジ回路B2は、共に第1構造体13aと13cに設けた。すなわち、第1ブリッジ回路B1と第2ブリッジ回路B2は、並行に配置されていた。
第1、第2の実施形態において、第1ブリッジ回路B1及び第2ブリッジ回路B2の異常は、デジタル信号をベースとして検出した。しかし、これに限らず、アナログ信号をベースとして検出することも可能である。
Claims (4)
- 被計測体に連結される第1構造体と、
第2構造体と、
前記第1構造体と前記第2構造体との間に伝達される力を検出する複数の歪センサを含む第1ブリッジ回路と、
前記第1構造体と前記第2構造体との間に伝達される力を検出する複数の歪センサを含む第2ブリッジ回路と、
前記第1ブリッジ回路の第1出力電圧と前記第2ブリッジ回路の第2出力電圧との差が第1閾値電圧を超えた場合、異常検出信号を出力するコントローラと、
前記複数の歪センサのそれぞれが設けられた金属板のそれぞれを、前記第1構造体と前記第2構造体との間に固定する複数のネジと、
を具備することを特徴とするトルクセンサ。 - 前記コントローラは、前記異常検出信号を出力した後、前記第1ブリッジ回路の前記第1出力電圧と、前記第2ブリッジ回路の前記第2出力電圧とのうち、第2閾値電圧を超えない方のブリッジ回路の出力電圧を選択することを特徴とする請求項1記載のトルクセンサ。
- 前記第1ブリッジ回路と前記第2ブリッジ回路は、互いに並行する方向に配置されることを特徴とする請求項1記載のトルクセンサ。
- 前記第1ブリッジ回路と前記第2ブリッジ回路は、互いに交差する方向に配置されることを特徴とすることを特徴とする請求項1記載のトルクセンサ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017023885A JP6692762B2 (ja) | 2017-02-13 | 2017-02-13 | トルクセンサ |
| CN201780080958.8A CN110121638A (zh) | 2017-02-13 | 2017-11-29 | 扭矩传感器 |
| EP17895539.9A EP3581908B1 (en) | 2017-02-13 | 2017-11-29 | Torque sensor |
| PCT/JP2017/042906 WO2018146917A1 (ja) | 2017-02-13 | 2017-11-29 | トルクセンサ |
| US16/451,839 US10955309B2 (en) | 2017-02-13 | 2019-06-25 | Torque sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017023885A JP6692762B2 (ja) | 2017-02-13 | 2017-02-13 | トルクセンサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018132313A JP2018132313A (ja) | 2018-08-23 |
| JP6692762B2 true JP6692762B2 (ja) | 2020-05-13 |
Family
ID=63108002
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017023885A Active JP6692762B2 (ja) | 2017-02-13 | 2017-02-13 | トルクセンサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10955309B2 (ja) |
| EP (1) | EP3581908B1 (ja) |
| JP (1) | JP6692762B2 (ja) |
| CN (1) | CN110121638A (ja) |
| WO (1) | WO2018146917A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6976892B2 (ja) * | 2018-03-29 | 2021-12-08 | 日本電産コパル電子株式会社 | トルクセンサ |
| JP2020012660A (ja) * | 2018-07-13 | 2020-01-23 | 日本電産コパル電子株式会社 | トルクセンサ |
| US20220291059A1 (en) * | 2019-07-24 | 2022-09-15 | Semitec Corporation | Contact force sensor and device provided with contact force sensor |
| DE102020101424B3 (de) * | 2020-01-22 | 2021-04-15 | Schaeffler Technologies AG & Co. KG | Verfahren zur Überprüfung einer Anordnung von mindestens drei Dehnungsmessstreifen sowie Spannungswellengetriebe |
| EP3896416A1 (en) * | 2020-04-16 | 2021-10-20 | MEAS France | Torque sensor device |
| CN111347446A (zh) * | 2020-04-17 | 2020-06-30 | 成都卡诺普自动化控制技术有限公司 | 一种中空型协作机器人机械臂关节 |
| CN111579133B (zh) * | 2020-05-27 | 2021-10-01 | 安徽大学 | 一种力分辨率连续可调的变构型力传感器 |
| CN112665765A (zh) * | 2020-12-01 | 2021-04-16 | 哈尔滨工业大学 | 一种基于并联分载原理的机器人高刚度关节力矩传感器 |
| TWI805978B (zh) * | 2020-12-22 | 2023-06-21 | 達明機器人股份有限公司 | 雙迴路力矩感知系統及其感知方法 |
| CN115790926B (zh) * | 2022-12-01 | 2023-07-04 | 华中科技大学 | 一种电动机组的转矩测量方法及装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5640905B2 (ja) | 1973-10-31 | 1981-09-24 | ||
| US3915015A (en) * | 1974-03-18 | 1975-10-28 | Stanford Research Inst | Strain gauge transducer system |
| JPS5947494B2 (ja) | 1977-01-28 | 1984-11-19 | 株式会社日立製作所 | 弾性表面波フイルタ |
| JP3444952B2 (ja) * | 1994-02-28 | 2003-09-08 | 大和製衡株式会社 | ロードセルの故障検出装置及び故障復帰装置 |
| JP4026247B2 (ja) * | 1998-10-01 | 2007-12-26 | 日本精工株式会社 | トルクセンサ |
| US20080204266A1 (en) * | 2004-02-03 | 2008-08-28 | Jussi Malmberg | Method and Device For Implementing Vibration Output Commands in Mobile Terminal Devices |
| JP4764619B2 (ja) * | 2004-08-23 | 2011-09-07 | 株式会社エー・アンド・デイ | 回転型分力計測装置 |
| CN101365609A (zh) * | 2005-12-13 | 2009-02-11 | Tk电子控股公司 | 信号处理系统和方法 |
| JP2007255953A (ja) * | 2006-03-22 | 2007-10-04 | Hitachi Ltd | 力学量測定装置 |
| EP2184576B1 (en) * | 2007-08-27 | 2019-05-15 | Hitachi, Ltd. | Semiconductor strain sensor |
| DE102009053043A1 (de) * | 2009-11-16 | 2011-05-19 | Baumer Innotec Ag | Kraftmesszelle zur Messung der Einspritzkraft beim Spritzgießen |
| WO2011069515A2 (en) * | 2009-12-08 | 2011-06-16 | Abb Ag | Multiaxial force-torque sensors |
| JP5640905B2 (ja) * | 2011-06-14 | 2014-12-17 | トヨタ自動車株式会社 | 起歪体及びこれを含む装置 |
| JP5947494B2 (ja) * | 2011-06-30 | 2016-07-06 | トヨタ自動車株式会社 | トルク計測装置の製造方法 |
| CN103430000B (zh) * | 2011-07-27 | 2015-06-24 | 三角力量管理株式会社 | 力传感器 |
| JP5699904B2 (ja) * | 2011-10-28 | 2015-04-15 | トヨタ自動車株式会社 | 起歪体及びトルクセンサ |
| CN203164326U (zh) * | 2013-03-11 | 2013-08-28 | 唐山钢铁集团微尔自动化有限公司 | 一种电阻应变传感器的数显式检测装置 |
| JP6135408B2 (ja) * | 2013-09-04 | 2017-05-31 | トヨタ自動車株式会社 | トルクセンサ、駆動装置、及びロボット |
| US10422707B2 (en) * | 2016-01-19 | 2019-09-24 | Ati Industrial Automation, Inc. | Compact robotic force/torque sensor including strain gages |
| JP6214072B1 (ja) * | 2016-08-09 | 2017-10-18 | 株式会社トライフォース・マネジメント | 力覚センサ |
-
2017
- 2017-02-13 JP JP2017023885A patent/JP6692762B2/ja active Active
- 2017-11-29 EP EP17895539.9A patent/EP3581908B1/en active Active
- 2017-11-29 WO PCT/JP2017/042906 patent/WO2018146917A1/ja active Application Filing
- 2017-11-29 CN CN201780080958.8A patent/CN110121638A/zh active Pending
-
2019
- 2019-06-25 US US16/451,839 patent/US10955309B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20190346329A1 (en) | 2019-11-14 |
| EP3581908B1 (en) | 2023-06-28 |
| EP3581908A1 (en) | 2019-12-18 |
| JP2018132313A (ja) | 2018-08-23 |
| CN110121638A (zh) | 2019-08-13 |
| EP3581908A4 (en) | 2020-12-30 |
| US10955309B2 (en) | 2021-03-23 |
| WO2018146917A1 (ja) | 2018-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6692762B2 (ja) | トルクセンサ | |
| JP6512268B2 (ja) | 車両用舵角検出装置及びそれを搭載した電動パワーステアリング装置 | |
| JP6515989B2 (ja) | 電動パワーステアリング装置 | |
| WO2015040961A1 (ja) | パワーステアリング装置および車両搭載機器の制御装置 | |
| WO2014098008A1 (ja) | 回転駆動装置 | |
| JP5980877B2 (ja) | ロボットに掛かる荷重を検知するためのシステム、ロボット、およびロボットシステム | |
| JP2014054876A (ja) | 車載電子制御装置 | |
| JP2012139770A (ja) | ロボット | |
| US10444098B2 (en) | Torque sensor and robot | |
| CN111684250B (zh) | 扭矩传感器 | |
| JP5203585B2 (ja) | 駆動制御装置及びその制御方法 | |
| JP6549812B2 (ja) | トルクセンサおよびロボット | |
| US9270209B2 (en) | Servo apparatus, and controlling method of servo apparatus | |
| JP6671682B2 (ja) | 絶対角度検出システムおよび絶対角度検出方法 | |
| KR102021461B1 (ko) | 모터 제어 장치 및 방법 | |
| Lee et al. | A two-staged residual for resilient external torque estimation with series elastic actuators | |
| JP5982222B2 (ja) | 加速度検出装置 | |
| JP2022037742A (ja) | 故障検出システム | |
| WO2021187342A1 (ja) | トルクセンサおよびロボット関節構造 | |
| JP2009276212A (ja) | 車両運動量センサ | |
| JP2010160099A (ja) | 多軸センサ | |
| JP2015184022A (ja) | 多回転検出角度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200415 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6692762 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |