以下、本発明の実施形態について、図面を参照して説明する。なお、以下の各図においては、各層や各部材を認識可能な程度の大きさにするため、各層や各部材の尺度を実際とは異ならせしめている。
<第1実施形態>
本実施形態に係る振動デバイスの一例としての水晶振動子100について説明する。水晶振動子100は、外部から印加される所定の交流電圧によって、所定の周波数で発振する振動デバイスである。
[水晶振動子]
まず、第1実施形態に係る振動デバイスとしての水晶振動子100の概略構成について説明する。図1は、第1実施形態に係る振動デバイスとしての水晶振動子100の概略図であり、図1(a)は平面図、図1(b)は図1(a)中のA−A断面図である。
水晶振動子100は、振動片10、パッケージ20、第1接合部材41、第2接合部材42、リッド30などから構成されている。なお、説明の便宜上、図1(a)ではリッド30の図示を省略している。また、以下の説明では、図1(b)中の上側を「上」、下側を「下」として説明する。また、図1(b)中の各部材の上側にある面を上面、下側にある面を下面として説明する。
[振動片]
振動片10は、圧電単結晶の一種である水晶で構成された水晶基板11と、励振電極12a,13a、引出電極12b,13b、および接続電極12c,13cと、により構成されている。振動片10は、励振電極12a,13aに所定の交流電圧が印加されることによって所定の共振周波数で振動する。
水晶基板11は、表裏の関係にある上面11aおよび下面11bと、第1辺11eと、を有している。水晶基板11の上面11aには、励振電極12a、および引出電極12bが形成されている。水晶基板11の下面11bには、励振電極13a、引出電極13b、および接続電極12c,13cが形成されている。また、接続電極12c,13cは、水晶基板11の下面11bの第1辺11e側に、第1方向54に並んで配置されている。引出電極12bは、励振電極12aから上面11aと下面11bとをつなぐ側面を経由して接続電極12cまで延出されており、励振電極12aと接続電極12cとを電気的に接続している。引出電極13bは、励振電極13aから接続電極13cまで延出されており、励振電極13aと接続電極13cとを電気的に接続している。
励振電極12a,13aは、平面視で、すなわち上から見て、矩形状をしており、略重なるように配置され、励振電極12aの中心と、励振電極13aの中心と、が略重なるように配置されている。また、水晶基板11には、励振電極12a,13aで挟まれた振動領域11cを有している。ここで、励振電極12a,13aの中心とは、励振電極12a,13aのそれぞれを、上から見た形状の重心(図心)である。
本実施形態では、励振電極12aの中心と励振電極13aの中心とが、略重なるように配置されているが、これに限らず、上から見て、励振電極12aと励振電極13aとが重なり、振動領域11cを有していればよい。なお、励振電極12a,13aは、矩形状以外にも、円形状、楕円形状、三角形状等の多角形形状等でもよいし、多角形形状の角部を丸めた形状でもよい。
励振電極12a,13a、引出電極12b,13b、および接続電極12c,13cは、蒸着やスパッタ、めっき等の方法や、金属部材を含むペースト(溶剤)を塗布した後に金属以外の溶剤成分を揮発させる方法等によって形成される。また、励振電極12a,13a、引出電極12b,13b、および接続電極12c,13cは、少なくとも下地層と上層の2層で構成されている。下地層の構成材料には、水晶基板11に対して密着性を有する材料が挙げられ、具体的には、クロム(Cr)、ニッケル(Ni)、チタン(Ti)、タングステン(W)等やこれらの金属元素の1種、または2種以上の混合物または合金が用いられる。一方、上層の構成材料には、電気伝導性が特に高い材料が挙げられ、具体的には、金(Au)、白金(Pt)、銀(Ag)、アルミニウム(Al)、銅(Cu)等の金属元素やこれらの金属元素の1種、または2種以上を含む混合物または合金が用いられる。なお、励振電極12a,13a、引出電極12b,13b、および接続電極12c,13cは、1層で構成されていてもよく、例えば、金(Au)、白金(Pt)、銀(Ag)、アルミニウム(Al)、銅(Cu)等の金属元素やこれらの金属元素の1種、または2種以上を含む混合物または合金で構成されていてもよい。
振動領域11cは、振動領域中心11dを有する。本実施形態では、励振電極12a,13aは、上から見て、矩形状をしているとともに略重なるように配置されているため、振動領域11cは、上から見て、矩形状をしているとともに、振動領域中心11dと励振電極12a,13aの中心とは略重なっている。ここで、振動領域中心11dは、振動領域11cを上から見た形状の重心点(図心)である。
[パッケージ]
パッケージ20は、基板としての底板21と、側壁22と、シールリング23などから構成されており、底板21は、上面21aおよび下面21bを有している。
具体的には、パッケージ20は、底板21の上面21aの周縁部に側壁22が積層されることによって、中央部が窪んだ形状の内部空間26(収納空間)が形成されており、この内部空間26には、振動片10が収納されている。パッケージ20の外形形状は限定されず、例えば、直方体状、円柱状などとすることができる。
底板21、および側壁22は、振動片10やリッド30の熱膨張係数と一致、あるいは近い熱膨張係数を備えた材料によって形成されるのが好ましく、本実施形態ではセラミックを用いている。
シールリング23は、側壁22とリッド30との接合材として、例えば、金ろうや銀ろう等の金属のろう材、ガラス、またはコバールなどの金属で形成されており、側壁22の上面に沿って枠状に設けられている。
また、底板21の上面21aには、内部接続端子24a,24bが形成されており、底板21の下面21bには、水晶振動子100の外部の回路や実装基板と少なくとも電気的に接続される外部接続端子25が複数形成されている。
内部接続端子24a,24bおよび複数の外部接続端子25は、例えば、タングステンメタライズ、ニッケルめっき、および金めっきの順に形成することにより得られる。
内部接続端子24a,24bは、底板21に配置されている配線(図示せず)によって、複数の外部接続端子25のうち異なる2つの外部接続端子25に電気的に接続されている。また、複数の外部接続端子25は、外部の実装基板(図示せず)と少なくとも電気的に接続して、振動片10に交流電圧を供給したり、周波数などの電気信号を出力したりするために使用される電極である。
[リッド]
リッド30は、パッケージ20の開口を覆う平板形状を有しており、例えば、コバールや42アロイなどの金属、セラミック、またはガラスなどで形成されている。
リッド30は、パッケージ20の内部空間26に振動片10を収納した後、内部空間26が気密状態、となるようにシールリング23と接合される。気密状態とされた内部空間26は、その内部圧力が所望の圧力に設定されている。例えば、内部空間26を、真空(大気圧より低い圧力(1×105Pa〜1×10-10Pa(JIS Z 8126−1:1999))の圧力の状態)状態としたり、窒素やアルゴン等の不活性ガスが充てんされ大気圧と同等の圧力状態としたりすることで、振動片10は、より安定した振動を継続することができる。
なお、本実施形態の内部空間26は、真空に密閉されている。内部空間26が真空に密閉されることにより、収納された振動片10のQ値が高められ、さらに、振動片10の振動が安定した状態を継続することができる。
[接合部材]
第1接合部材41と、第2接合部材42と、は、水晶基板11の下面11bにある第1辺11eが延伸する方向に並んで配置されている。
第1接合部材41および第2接合部材42は、導電性の部材を含有する樹脂、例えば、導電性接着剤で形成されている。導電性の部材としては、例えば、金(Au)、銀(Ag)、銅(Cu)、アルミニウム(Al)、白金(Pt)等の金属元素やこれらの金属元素の一種または二種以上を含む混合物等の金属の微粒子や、前述の金属がめっきされた樹脂微粒子や、炭素微粒子等、である。樹脂としては、エポキシ系の樹脂、シリコン系の樹脂、ポリイミド系の樹脂、ポリアミド系の樹脂、またはアクリル系の樹脂等、が用いられる。
第1接合部材41は、接続電極12cと電気的および機械的に接続されているとともに、内部接続端子24aと電気的および機械的に接続されている。第2接合部材42は、接続電極13cと電気的および機械的に接続されているとともに、内部接続端子24bと電気的および機械的に接続されている。換言すると、振動片10は、第1接合部材41および内部接続端子24aと、且つ、第2接合部材42および内部接続端子24bと、を介して、底板21に支持されている。すなわち、振動片10は、上から見て、第1辺11eが励振電極12a,13aを挟んで向かい合う辺側の領域では、底板21、側壁22、シールリング23、およびリッド30と接触しておらず、底板21に片持ち支持されている。
第1接合部材41および第2接合部材42は、導電性を有するため、接続電極12cと内部接続端子24aとの間と、接続電極13cと内部接続端子24bとの間と、の機械的接合と電気的接合とを同時に行うことができる。従って、振動片10と底板21との機械的接合と電気的接合とをそれぞれ別の部材を用いて行う場合と比較して、振動デバイスに用いる部材を低減することができ、水晶振動子100を効率よく製造することができる。
第1接合部材41の接続電極12c側、すなわち振動片10側の上面41aは、第1接合中心41bを有する。第2接合部材42の接続電極13c側、すなわち振動片10側の上面42aは、第2接合中心42bを有する。
第1接合中心41bおよび第2接合中心42bは、それぞれ、第1接合部材41および第2接合部材42を上から見た形状、すなわち上面41aおよび上面42aを上から見た形状の重心点(図心)である。
次に、振動領域11cと、第1接合部材41および第2接合部材42と、の関係について説明する。
まず、第1接合中心41bと第2接合中心42bとを通る仮想線を第1仮想直線51とし、振動領域中心11dを通り第1仮想直線51と直交する仮想線を第2仮想直線52とする。なお、第1仮想直線51と第2仮想直線52との交点53は第1接合中心41bと第2接合中心42bとの間に配置される。すなわち、第1接合部材41と第2接合部材42とは、上から見て、第2仮想直線52を挟んで、第1辺11eが延伸する方向である第1方向54に並んで配置されている。
ここで、第1接合中心41bから第2接合中心42bまでの距離をL1、振動領域中心11dから第1接合中心41bと第2接合中心42bとを結ぶ線におろした垂線の長さ、すなわち振動領域中心11dから交点53までの距離をL2として、以降に、上述のL1、およびL2と、ヒステリシスの関係について説明する。
まず、水晶振動子100のヒステリシスについて説明する。振動片10の共振周波数は、水晶振動子100の周囲温度が上昇している過程における所定の温度Tでの共振周波数と、水晶振動子100の周囲温度が低下している過程における所定の温度Tでの共振周波数と、が異なる特性を有している。この周囲温度が上昇しているときと周囲温度が低下しているときとで異なる特性を有することを、ヒステリシスを持つという。これは、以下の理由によると考えられる。
本実施形態に係る水晶振動子100は、振動片10と底板21とは同一の材料で構成されていないため、熱膨張係数が異なっており、水晶振動子100の周囲温度の変化にともなう振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、が異なる。従って、水晶振動子100の周囲温度が変化した場合には、振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差によって振動片10の内部に応力が発生することになる。
また、振動片10が水晶振動子100の内部、すなわちパッケージ20の内部に第1接合部材41および第2接合部材42を介して接合されていることにより、水晶振動子100の周囲温度の変化は、底板21よりも振動片10の方が温度変化の伝わり方が遅くなる。すなわち、水晶振動子100の周囲温度が上昇している過程では、水晶振動子100の周囲温度が所定の温度Tとなったときでも、振動片10の温度は所定の温度Tよりも低い状態にあり、水晶振動子100の周囲温度が下降している過程では、水晶振動子100の周囲温度が所定の温度Tとなったときでも、振動片10の温度は所定の温度Tよりも高い状態にある。
上述のことから、水晶振動子100の周囲温度が所定の温度Tであっても、周囲温度が上昇している過程か、下降している過程か、によって振動片10の温度が異なるので、振動片10の伸びまたは縮み量が異なる。従って、振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差によって振動片10に発生する応力は、水晶振動子100の周囲温度が上昇している過程で周囲温度が所定の温度Tになった場合と、周囲温度が下降している過程で周囲温度が所定の温度Tになった場合と、では異なる。
また、所定の交流電圧が印加された場合の振動片10の共振周波数は、振動片10にかかる応力によって変化することが知られている。
従って、振動片10を有する水晶振動子100の共振周波数は、水晶振動子100の周囲温度が上昇している過程における温度Tでの共振周波数と、水晶振動子100の周囲温度が低下している過程における温度Tでの共振周波数とが異なることになり、これをヒステリシス特性またはヒステリシスという。
上述の振動片10に応力がかかると振動片10の共振周波数が変化する理由は、振動片10が振動している状態において振動エネルギーが多く集まる振動領域11cに対しても応力がかかり、振動領域11c内の振動エネルギーの分布が変化するためと考えられる。また、振動領域11c内の一部に応力がかかる場合と比較して、振動領域11cの全体に応力がかかる場合、すなわち振動領域11cにおいて応力がかかる領域が広がるほど、振動領域11c内の振動エネルギーの分布に影響を与えるため、振動片10の共振周波数の変化量は大きくなると考えられる。以上のことから、水晶振動子100の周囲温度の変化にともなう振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の間の差によって発生する応力が振動領域11cに伝わることを低減すれば、振動片10の共振周波数の変化が低減できると考えられる。
そこで、本願発明者は、振動領域11c、第1接合部材41、および第2接合部材42と、振動片10内における応力分布と、の関係について検討を行った。
図2および図3は、水晶振動子の周囲温度が上昇または下降する過程において所定の温度Tとなったときに、振動片10にかかる応力を説明する図である。図2(a)は、図1のL1=W1である水晶振動子100aにおいて、水晶振動子100aの周囲温度が下降している過程で所定の温度Tとなったときの、第1仮想直線51での断面方向から見た振動片10のたわみを示す図である。図2(b)は、図1のL1=W2である水晶振動子100bにおいて、水晶振動子100bの周囲温度が下降している過程で所定の温度Tとなったときの第1仮想直線51での断面方向から見た振動片10のたわみを示す図である。なお、W1とW2とは、W1>W2としている。また、水晶振動子100aと、水晶振動子100bと、は、交点53から振動領域中心11dまでの距離L2が同じである。
図3(a)は、図1(a)の第2仮想直線52での断面図である。図3(b)は、図2(a)の水晶振動子100aおよび図2(b)の水晶振動子100bにおいて、周囲温度が所定の温度Tとなったときの、第2仮想直線52が延伸する方向における振動片10内の応力分布を示す模式図であり、Saは水晶振動子100aにおける振動片10内の応力分布を、Sbは水晶振動子100bにおける振動片10内の応力分布を示す。また、図3(b)において、縦軸は応力S[N/m2]の絶対値を、横軸は交点53からの距離D[mm]を表わす。なお、図3(a),(b)では、交点53から振動領域中心11dに対して第1仮想直線51側にある振動領域11cの端部55までの距離をd1、第1仮想直線51から振動領域中心11dまでの距離をd2、交点53から振動領域中心11dに対して第1仮想直線51の反対側にある振動領域11cの端部56までの距離をd3、としている。
なお、説明の便宜上、図2(a),(b)、図3(a)では、側壁22、シールリング23、および外部接続端子25の図示を省略している。また、水晶振動子100a,100bともに、振動片10内における励振電極12a,13aの配置は、同じである。
上述のヒステリシスについての説明のとおり、水晶振動子100a,100bの周囲温度が変化すると、熱の伝わり方の違いによって振動片10と底板21とに温度差が生じる。一例として、水晶振動子100a,100bの周囲温度が下降している過程おいて、周囲温度が所定の温度Tとなったときでは、底板21の温度が所定の温度Tとなっても、振動片10の温度は所定の温度Tよりも高い状態となる。このため、例えば、振動片10と底板21とが同じ値の正の熱膨張係数を持つ場合、所定の温度Tにおいては振動片10の温度の方が底板21の温度よりも高くなるため、振動片10の伸び量の方が底板21の伸び量よりも大きくなり、振動片10が厚さ方向にたわむ。
図2(a),(b)に、水晶振動子100a,100bの周囲温度が下降している過程において、所定の温度Tとなったときの振動片10のたわみを示す。この図から、振動片10に発生するたわみは、図2(b)のL1=W2の水晶振動子100bでのたわみδ2の方が、図2(a)のL1=W1の水晶振動子100aでのたわみδ1よりも小さい。これは、振動片10を支持している接合部材の間隔である第1接合中心41bから第2接合中心42bまでの距離L1が、水晶振動子100bでの距離W2の方が、水晶振動子100aでの距離W1よりも短いため、振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差の絶対値が小さくなるためである。
図3(b)は、図3(a)の断面部の第2仮想直線52が延伸する方向において、図2(a),(b)に示すたわみによって振動片10内に発生する応力の分布を示す模式図である。図3(b)から、振動片10内の応力の分布は、SaおよびSbともに、D=0最大値となり、その値は、それぞれSa0およびSb0である。また、Sa,Sbともに、交点53からの距離Dが大きくなるに従って、応力が減少する。
また、振動片10内の応力の分布は、Sbの方がSaよりも交点53からの距離Dの値が大きくなるにつれて早く減少する。さらに、図3(b)において、D=d1、D=d2およびD=d3の全ての部分で、Sbの方が、Saよりも小さくなる。すなわち、L1=W2の水晶振動子100bの振動領域11c内に分布する応力の方が、L1=W1の水晶振動子100aの振動領域11c内に分布する応力よりも小さくなる。
上述のように、振動片10内の応力分布は、第1接合中心41bから第2接合中心42bまでの距離L1によって変化し、L1が短い方が、L1が長い場合と比較して、振動領域11c内にかかる応力を減少させることができる。
しかし、振動領域11c内にかかる応力は、L1の長さを規定しただけでは低減させることができない場合がある。なぜならば、振動領域中心11dから交点53までの距離L2は、励振電極13aと、第1接合部材41および第2接合部材42と、が直接接触しない範囲であれば任意の値にできるため、振動領域11cが応力の大きな領域に配置される場合があるためである。図2および図3に示す水晶振動子100bではL2=d2であるが、例えば、水晶振動子100bにおけるL2の値を励振電極13aが第1接合部材41および第2接合部材42に直接接触しない範囲でd2よりも短くすることが可能であり、L2をd2よりも短くした場合には、L2=d2の場合と比較して、振動領域11c内に分布する応力は大きくなる。なお、水晶振動子100aにおいても、上述と同様のことが言える。
以上のことから、振動領域11c内の応力分布は、第1接合中心41bから第2接合中心42bまでの距離L1および振動領域中心11dから交点53までの距離L2それぞれの絶対値ではなく、L1とL2との比に関係すると考えられる。
上述のように、振動片10を有する水晶振動子100は、振動片10にかかる応力に応じたヒステリシスを持つと考えられ、水晶振動子100のヒステリシスを低減するためには、第1接合部材41および第2接合部材42と、振動領域11cと、の位置関係が重要であると考えられる。従って、本願発明者は、水晶振動子100のヒステリシスが、第1接合中心41bから第2接合中心42bまでの距離L1と、振動領域中心11dから交点53までの距離L2と、の比であるL1/L2、に関係すると考えて実験を行ない、図3に示す結果を得た。
本実験に用いた振動片10は、図1(a)に示す第1方向54の短辺が1.25mm、第1方向54と交差する方向の長辺が1.80mmの矩形(長方形)である。励振電極12a,13aは、上から見て、矩形状であるとともに略重なるように配置され、振動片10の短辺に沿った方向に短辺が、振動片10の長辺に沿った方向に長辺が配置されている。
励振電極12a,13aは、短辺が0.90mm、長辺が1.08mmの矩形(長方形)である。
振動片10の中心および励振電極12a,13aの中心は、第1仮想直線51と略重なっている。振動領域11cは、上から見て、励振電極12a,13aの中心が略重なっているため、励振電極12a,13aと略同じ大きさおよび位置に配置されている。
第1接合中心41bおよび第2接合中心42bは、第1辺11eに沿った方向に並んでいるとともに、上から見て、第1接合中心41bから第1辺11eまでの距離および第2接合中心42bから第1辺11eまでの距離は、0.175mmである。
また、振動片10、励振電極12a,13a、および振動領域11cは、上から見て、第2仮想直線52に対して略線対称に配置されており、振動領域中心11dから交点53までの距離は、0.825mmである。また、本実施形態の実験において、第1接合部材41の上面41aおよび第2接合部材42の上面42aは、それぞれ、第1接合中心41bを中心とした直径0.35mmの円および第2接合中心42bを中心とした直径0.35mmの円となっている。また、本実験では、振動領域中心11dから交点53までの距離L2を略一定にして、第1接合中心41bから第2接合中心42bまで距離L1を変化させてL1/L2の値を変化させている。
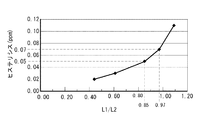
図4は、L1/L2と水晶振動子100のヒステリシスとの関係を示す図である。ここで、ヒステリシスは、後述するように、温度下降時の各温度における水晶振動子100の共振周波数と、温度上昇時の各温度における水晶振動子100の共振周波数と、を測定し、それぞれの温度における温度下降時の共振周波数と、温度上昇時の共振周波数と、の差の絶対値を求め、その値の最大値としている。
また、図4における、水晶振動子100のヒステリシスは、以下のようにして測定および計算をしている。本実験では、L1/L2が0.36、0.50、0.70、0.80、0.90の5種類の水晶振動子100についてヒステリシスの測定および計算を行った。本実験における水晶振動子100のヒステリシスの測定および計算は、以下に示す方法を用いた。
まず、水晶振動子100の周囲温度を、常温(+25℃)、から+85℃まで加熱する。そして、水晶振動子100の周囲温度を+85℃から−40℃まで下降させつつ、5℃の温度間隔で、温度下降時の水晶振動子100の共振周波数を測定する。次に、水晶振動子100の周囲温度を−40℃から+85℃まで上昇させつつ、温度下降時に共振周波数を測定した温度で、温度上昇時の水晶振動子100の共振周波数を測定する。次に、温度下降時および温度上昇時に測定された同一温度条件での水晶振動子100の共振周波数に対して、温度下降時の共振周波数と温度上昇時の共振周波数との差である差周波数を求める。次に、各温度条件での差周波数を水晶振動子100の公称周波数(常温(+25℃)での共振周波数)で正規化して、各温度条件での正規化された周波数を求める。最後に、各温度条件での正規化された周波数のうち、絶対値が最大となる値を求め、その値を水晶振動子100のヒステリシスとして抽出する。本実験に用いたL1/L2が5種類の水晶振動子100について、上記の測定を行って、それぞれのL1/L2における水晶振動子100のヒステリシスを計算する。
図4から、第1接合中心41bから第2接合中心42bまでの距離L1と、振動領域中心11dから交点53までの距離L2と、の比であるL1/L2が0.97のとき、水晶振動子100のヒステリシスは0.07ppmとなっている。また、図4から、L1/L2に0.36よりも小さな値を外挿しても、さらに水晶振動子100のヒステリシスが小さくなることがわかる。従って、0<L1/L2≦0.97の範囲において、水晶振動子100のヒステリシスは0.07ppm以下を満たしている。また、L1/L2=0.85のとき、水晶振動子100のヒステリシスは0.05ppmとなっている。従って、0<L1/L2≦0.85の範囲において、水晶振動子100のヒステリシスは0.05ppm以下となっている。
水晶振動子100のヒステリシスは、水晶振動子100や水晶振動子100を用いた発振器等を基準周波数源として電子機器などの製品に用いる場合には、電子機器の性能を低下させないために絶対値が小さいことが要求される。特に、水晶振動子100や水晶振動子100を用いた発振器等が、例えば、携帯電話機のフェムトセル用基地局装置等の基準周波数源に用いられる場合には、水晶振動子100や水晶振動子100を用いた発振器等の周波数温度特性の変動は、0.25ppm以下が求められており、この値を満足するために、ヒステリシスは0.1ppm以下が求められている。従って、水晶振動子100や水晶振動子100を用いた発振器等のヒステリシスは、0.07ppm以下であることが好適である。
また、水晶振動子100や水晶振動子100を用いた発振器等がさらに高い周波数精度が要求される電子機器に使用される場合、例えば、GPS信号と同期をとるための装置や、携帯電話機のマクロセル用基地局装置や、光ネットワーク(基幹系)用基地局装置等に用いられる場合には、水晶振動子100や水晶振動子100を用いた発振器等のヒステリシスは、0.05ppm以下であることが好適である。
以上述べたように、本実施形態に係る水晶振動子100によれば、以下の効果を得ることができる。水晶振動子100において、例えば、水晶振動子100の周囲温度の変化にともなう振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差によって応力が発生した場合でも、L1/L2が、
0<L1/L2≦0.97
の関係を満足することによって、振動片10の振動領域11cに伝わる応力を低減させることができる。その結果、水晶振動子100の特性変動、例えば、ヒステリシスの大きさを低減することができる。
また、水晶振動子100において、例えば、水晶振動子100の周囲温度の変化にともなう振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差によって応力が発生した場合でも、L1/L2が、
0<L1/L2≦0.85
の関係を満足することによって、振動片10の振動領域11cに伝わる応力をさらに低減させることができる。その結果、水晶振動子100の特性変動、例えば、ヒステリシスの大きさを0<L1/L2≦0.97場合と比較してさらに低減することができる。
なお、本実験においては、第1接合部材41の上面41aおよび第2接合部材42の上面42aの直径が0.35mmであるため、L1の下限値としては、第1接合部材41と第2接合部材42とが電気的に接続しない範囲として、0.35mmより大きいことが好適である。すなわち、L1/L2が、
0.425<L1/L2≦0.97
の関係を満足することが好適である。
また、第1接合部材41および第2接合部材42を導電性接着剤で形成する場合には、第1接合部材41の上面41aおよび第2接合部材42の上面42aの直径は0.15mm以下で形成することもできるため、L1の下限値としては、第1接合部材41と第2接合部材42とが電気的に接続しない範囲として、0.15mmより大きいことが好適である。すなわち、L1/L2が、
0.185<L1/L2≦0.97
の関係を満足することが好適である。
また、本実験においては、水晶振動子100の周囲温度を下降させたときの共振周波数の測定を先に行っているが、これに限らず、水晶振動子100の周囲温度を上昇させたときの共振周波数の測定を先に行ってもよい。また、測定する温度間隔についても、上記実験で設定した5℃間隔に限らず、ヒステリシスが計算できる温度間隔であればよく、例えば、0.5℃以上10℃以下の範囲内の温度間隔でもよい。さらに、上記実験において、常温を+25℃としているが、これに限らず、例えば、常温は0℃以上+40℃以下の範囲としてもよい。
また、本実施形態では、振動片10に水晶基板11を用いているが、振動片10は、タンタル酸リチウム、ニオブ酸リチウムなどの他の圧電単結晶で構成されていてもよい。振動片10が水晶以外の圧電単結晶で構成される場合には、水晶で構成された場合と同様の特性が得られるように、結晶の方位(カット角)などが選択される。振動片10は、圧電振動片以外にも、弾性表面波素子やMEMS振動片等を用いることができる。また、振動片10は、圧電単結晶以外にも、ジルコン酸チタン酸鉛等の圧電セラミックス等の圧電材料、又はシリコン基板等で構成されてもいてもよい。さらに、振動片10の形状は、特に限定されず、二脚音叉、H型音叉、三脚音叉、くし歯型、直交型、角柱型等の形状であってもよい。振動片10の励振手段としては、圧電効果によるものを用いてもよいし、クーロン力による静電駆動を用いてもよい。加えて、振動片10としては、物理量を検出する素子、例えば、慣性センサー(加速度センサー、ジャイロセンサー等)、力センサー(傾斜センサー等)用の素子であってもよい。
また、振動片10、励振電極12a,13aについては、本実験に用いた形状や大きさ以外にも、各種の形状や大きさとすることができる。さらに、第1接合部材41の上面41aおよび第2接合部材42の上面42aについては、本実験に用いた形状や大きさ以外にも、各種の形状や大きさとすることができる。
また、本実施形態では、第1接合部材41および第2接合部材42は導電性を有する部材を用いているが、これに限らず、第1接合部材41および第2接合部材42の少なくとも一方が導電性を有さない部材、例えば、導電性の部材を含有しない樹脂やガラス等であってもよい。第1接合部材41および第2接合部材42が導電性を有さない部材の場合は、例えば、振動片10は第1接合部材41および第2接合部材42を介して底板21に機械的に支持され、励振電極12aと内部接続端子24aと、および励振電極13aと内部接続端子24bと、は、ボンディングワイヤー等の導電性部材を介して電気的に接続することができる。また、第1接合部材41および第2接合部材42のうち、一方が導電性を有し他方が導電性を有さない部材であっても、導電性を有さない方の接合部材側は上記と同様の方法を用いて機械的接続および電気的接続を行い、導電性を有する方の接合部材側は第1実施形態と同様の機械的接続および電気的接続を行うことができる。
このように、第1接合部材41および第2接合部材42の少なくとも一方に導電性を有さない部材を用いても、第1実施形態の少なくとも一部の効果を得ることができる。すなわち、第1接合部材41および第2接合部材42の少なくとも一方に導電性を有さない部材を用いても、振動片10は第1接合部材41および第2接合部材42を介して底板21に機械的に接続されている。従って、振動領域11c、第1接合部材41、および第2接合部材42が、
0<L1/L2≦0.97
の関係を、満足すれば、水晶振動子100の周囲温度の変化にともなう振動片10の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差によって発生した応力が振動片10の振動領域11cに伝わることを低減できる。その結果として、水晶振動子100の特性変動、例えば、ヒステリシスの大きさを低減することができるためである。
さらに、本実施形態において、振動デバイスの一例として振動片10を有する水晶振動子100を例示して説明したが、これに限らず、各種の振動デバイスに応用することができる。振動デバイスの例としては、物理量を検出するための素子と、素子からの信号を検出する検出回路または素子を発振させるための発振回路と、を有する、慣性センサー(加速度センサー、ジャイロセンサー等)、力センサー(傾斜センサー等)等のセンサーでもよい。上述の発振回路および検出回路は、例えば、底板21の内部空間26側に配置されていてもよいし、底板21の複数の外部接続端子25が形成されている側に配置されていてもよい。また、上述の発振回路および検出回路は、振動デバイスと離れて配置され、振動デバイスの複数の外部接続端子25を介して振動片10と電気的に接続されていてもよい。
<第2実施形態>
第2実施形態に係る振動デバイスの一例として、水晶振動子200について説明する。なお、上記第1実施形態に係る水晶振動子100と同じ構成要素については、同一符号を付して説明を省略し、上記第1実施形態に係る水晶振動子100と異なる部分を中心に説明する。
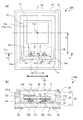
図5は、第2実施形態に係る振動デバイスとしての水晶振動子200の概略図であり、図5(a)は平面図、図5(b)は図5(a)中のB−B断面図である。
[振動片]
図5に示すように、水晶振動子200は、振動片110が第1実施形態とは異なり、上から見て、第1接合中心41bと第2接合中心42bとを結ぶ第1仮想直線51と、下面111bの励振電極113aと、の間に、水晶基板111の下面111b側に窪み111fが形成されている。また、窪み111fは、第1方向54に沿った方向において、第1接合中心41bから第2接合中心42bまで延設されている。
窪み111fの部分の水晶基板111の上面111aおよび下面111bと交差する方向の距離、すなわち窪み111fの厚さT1は、窪み111fが形成されていない水晶基板111の厚さT2よりも薄くなっている。また、窪み111fは、上から見て、水晶基板111の第1方向54の端部よりも内側に形成されている。
本実施形態の水晶振動子200は、周囲温度の変化にともなう水晶振動子200の伸びまたは縮み量と、振動片110と底板21の伸びまたは縮み量と、の間の差によって発生する応力が、振動片110の振動領域111c、すなわち図5(a)の水晶基板111において励振電極112a,113aと重なっている領域、および図5(b)の水晶基板111において網掛けハッチングされている領域へは、窪み111fのある領域を介して振動領域111cに伝わる。水晶基板111の窪み111fの厚さT1は、水晶基板111の厚さT2よりも薄い。厚さT1の領域を介して厚さT2の領域に応力が伝わる場合、厚さT1の領域は厚さT2の領域と比較して、より大きくひずむことで応力を吸収するため、厚さT2の領域に伝わる応力は低減する。従って、水晶振動子200の周囲温度の変化にともなう振動片110の伸びまたは縮み量と、基板としての底板21の伸びまたは縮み量と、の間の差によって発生する応力は、窪み111fをひずませることで、振動領域111cに伝わりにくくなる。
以上述べたように、本実施形態に係る水晶振動子200によれば、振動領域111c、第1接合部材41、および第2接合部材42が、
0<L1/L2≦0.97
の関係を、満足することにより、第1実施形態に係る水晶振動子100における効果に加えて、以下の効果を得ることができる。本実施形態の水晶振動子200では、第1実施形態と比較して、周囲温度の変化にともなう振動片110の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の差によって発生して振動領域11cに伝わる応力がさらに低減する。従って、第1実施形態と比較して、水晶振動子200の特性変動、例えば、ヒステリシスの大きさをさらに低減することができる。
なお、窪み111fが形成される位置は、本実施形態の位置以外でもよい。窪み111fは、例えば、上から見て、第1接合中心41bと励振電極112a,113aとの間と、第2接合中心42bと励振電極112a,113aとの間と、の2箇所以上に分離して形成されていてもよい。さらに、窪み111fは、第1仮想直線51と、励振電極112a,113aと、の間であれば、第1方向54と交差する方向において、2箇所以上に形成されていてもよい。
<第3実施形態>
第3実施形態に係る振動デバイスの一例として、水晶振動子300について説明する。なお、上記第1実施形態に係る水晶振動子100と同じ構成要素については、同一符号を付して説明を省略し、上記第1実施形態に係る水晶振動子100と異なる部分を中心に説明する。
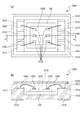
図6は、第3実施形態に係る振動デバイスとしての水晶振動子300の概略図であり、図6(a)は平面図、図6(b)は図6(a)中のC−C断面図である。
[振動片]
図6に示すように、水晶振動子300は、振動片210が第1実施形態とは異なり、上から見て、第1接合中心41bと第2接合中心42bとを結ぶ第1仮想直線51と、励振電極212a,213aと、の間に、水晶基板211の上面211aから下面211bまでを貫通する孔211gが形成されている。また、孔211gは、第1方向54に沿った方向において、第1接合中心41bから第2接合中心42bまで延設されている。
本実施形態の水晶振動子300は、周囲温度の変化にともなう振動片210の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の間の差によって発生する応力が、振動片210の振動領域211c、すなわち図6(a)の水晶基板211において励振電極212a,213aと重なっている領域、および図6(b)の水晶基板211において網掛けハッチングされている領域へは、水晶基板211の孔211gに隣接していない領域および孔211gに隣接した領域の両方を介して振動領域211cに伝わる。水晶基板211の孔211gに隣接した領域は、孔211gに隣接していない領域よりもひずみやすい。その結果、水晶振動子300の周囲温度の変化にともなう振動片210の伸びまたは縮み量と、基板としての底板21の伸びまたは縮み量と、の間の差によって発生する応力は、孔211gに隣接した領域をひずませることで、振動領域211cに伝わりにくくなる。
以上述べたように、本実施形態の水晶振動子300によれば、振動領域211c、第1接合部材41、および第2接合部材42が、
0<L1/L2≦0.97
の関係を、満足することにより、第1実施形態に係る水晶振動子100における効果に加えて、以下の効果を得ることができる。本実施形態の水晶振動子300では、第1実施形態と比較して、水晶振動子300の周囲温度の変化にともなう振動片210の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の間の差によって発生して振動領域211cに伝わる応力がさらに低減する。従って、第1実施形態と比較して、水晶振動子300の特性変動、例えば、ヒステリシスの大きさをさらに低減することができる。
なお、孔211gの形成される位置は、本実施形態の位置以外でもよい。孔211gは、例えば、上から見て、第1接合中心41bと励振電極212a,213aとの間と、第2接合中心42bと励振電極212a,213aとの間と、の2箇所以上に形成されていてもよい。さらに、孔211gは、第1仮想直線51と、励振電極212a,213aと、の間であれば、第1方向54と交差する方向において、2箇所以上に形成されていてもよい。
<第4実施形態>
第4実施形態に係る振動デバイスの一例として、水晶振動子400について説明する。なお、上記第1実施形態に係る水晶振動子100と同じ構成要素については、同一符号を付して説明を省略し、上記第1実施形態に係る水晶振動子100と異なる部分を中心に説明する。
図7は、第4実施形態に係る振動デバイスとしての水晶振動子400の概略図であり、図7(a)は平面図、図7(b)は図7(a)中のD−D断面図、図7(c)は図7(b)の励振電極部の部分断面図である。
[振動片]
本実施形態の水晶振動子400は、振動片310において、水晶基板311の上面および下面と交差する方向の距離、すなわち水晶基板311の厚さが、第1の厚さT3を有する第1領域311hと、T3よりも薄い厚さT4を有する第2領域311kと、を有し、いわゆるメサ型の構造を持っている。水晶基板311は、上から見て、第1領域311hが第2領域311kに囲まれた形状をしている。
図7(a)に示すように、励振電極312a,313aは、上から見て、矩形状をしており、略重なるように配置されている。すなわち、上から見て、励振電極312aの中心と、励振電極313aの中心とが、略重なるように配置されている。また、水晶基板311には、励振電極312a,313aで挟まれた振動領域311c、すなわち図7(a)の水晶基板311において励振電極312a,313aと重なっている領域、および図7(b)の水晶基板311において網掛けハッチングされている領域を有している。さらに、励振電極312a,313aは、上から見て、第1方向54においては第1領域311hと重なるように、第1方向54と交差する方向においては第1領域311hおよび第2領域311kと重なるように配置されている。
振動領域311cは、振動領域中心311dを有する。振動領域311cは、励振電極312a,313aが上述の配置となっているため、上から見て、矩形状をしており、振動領域中心311dと励振電極312a,313aの中心とは、略重なっている。
振動領域中心311dと第1領域311hの中心とは、上から見て、略重なるように配置されている。また、本実施形態では、第1領域311hは、振動領域311cの大部分と重なっている。振動領域311cの大部分とは、例えば80%以上であることが好ましい。なお、上述した励振電極312a,313aの中心、振動領域中心311d、および第1領域311hの中心は、それぞれ、励振電極312a,313aを上から見た形状の重心(図心)、振動領域311cを上から見た形状の重心(図心)、および第1領域311hを上から見た形状の重心(図心)である。
また、図7(b),(c)に示すように、励振電極312aは、第1方向54と交差する方向において、第1領域311hの上面と、第1領域311hの上面と第2領域311kの上面とをつなぐ側面311mと、第2領域311kの上面と、に連続して配置されている。励振電極313aは、第1方向54と交差する方向において、第1領域311hの下面と、第1領域311hの下面と第2領域311kの下面とをつなぐ側面311nと、第2領域311kの下面と、に連続して配置されている。
本実施形態の水晶振動子400は、上から見て、振動領域中心311dが、第1の厚さT3を持つ第1領域311hと重なっているとともに、第1接合中心41bおよび第2接合中心42bが、T3よりも薄い厚さT4を持つ第2領域311kと重なっている。すなわち、振動片310は、振動片310が振動している状態において振動エネルギーの多くが集まる第1領域311hの厚さT3よりも薄い厚さT4を持つ第2領域311kで、第1接合部材41および第2接合部材42を介して底板21に支持されている。このため、水晶振動子400の周囲温度の変化にともなう振動片310の伸びまたは縮み量と、基板としての底板21の伸びまたは縮み量と、の間の差によって発生する応力は、第2領域311kを介して振動領域311cに伝わる。厚さT4の領域を介して厚さT3の領域に応力が伝わる場合、厚さT4の領域は厚さT3の領域と比較してより大きくひずむことで応力を吸収するため、厚さT3の領域に伝わる応力は低減する。従って、水晶振動子400の周囲温度の変化にともなう振動片310の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の間の差によって発生する応力は、振動片310の第2領域311kをひずませることで、振動領域311cに伝わりにくくなる。
以上述べたように、本実施形態に係る水晶振動子400によれば、振動領域311c、第1接合部材41、および第2接合部材42が、
0<L1/L2≦0.97
の関係を、満足することにより、第1実施形態に係る水晶振動子100における効果に加えて、以下の効果を得ることができる。本実施形態の水晶振動子400では、第1実施形態と比較して、水晶振動子400の周囲温度の変化にともなう振動片310の伸びまたは縮み量と、底板21の伸びまたは縮み量と、の間の差によって発生して振動領域311cに伝わる応力がさらに低減する。従って、第1実施形態と比較して、水晶振動子400の特性変動、例えば、ヒステリシスの大きさをさらに低減することができる。
なお、本実施形態の振動片310は、上から見て、励振電極312a,313aの中心、振動領域中心311d、および第1領域311hの中心が略重なるように配置されているが、これに限らず、上から見て、振動領域中心311dと第1領域311hとが重なるように励振電極312a,313aが配置されていればよい。また、励振電極312a,313aは、上から見て、一方の励振電極が他方の励振電極の内側に配置されていてもよいし、両方の励振電極が第1領域311hのみと重なるように配置されていてもよい。
<振動片の変形例>
本実施形態に係る振動デバイスにおいて、振動片は、図7に示した振動片310の形状以外でもよい。振動片の変形例について、図8を用いて説明する。なお、第1実施形態に係る振動片10または第4実施形態に係る振動片310と同じ構成要素については、同一符号を付して説明を省略し、第1実施形態に係る振動片10または第4実施形態に係る振動片310と異なる部分を中心に説明する。
図8は、本実施形態に係る振動片の変形例を示す概略図であり、図8(a)は、変形例の一例である振動片410の平面図、図8(b)は、図8(a)中のE−E断面図、図8(c)は、変形例の他の例である振動片510の平面図、図8(d)は、図8(c)中のF−F断面図、図8(e)は図8(d)の励振電極部の部分拡大断面図である。なお、以下の説明では、図8(b),(d)中の上側を「上」、下側を「下」として説明する。また、図8(b),(d)中の各部材の上側にある面を上面、下側にある面を下面として説明する。
振動片410は、図8(a),(b)に示すように、水晶基板411の厚さT3の第1領域411hの上側の面が、厚さT4の第2領域411kの上側の面よりも上側に突出しているとともに、第1領域411hの下側の面と第2領域411kの下側の面とが、平面状につながっている。励振電極412a,413aは、上から見て、略重なるように配置されている。また、水晶基板411には、励振電極412a,413aで挟まれた振動領域411c、すなわち図8(a)の水晶基板411において励振電極412a,413aと重なっている領域、および図8(b)の水晶基板411において網掛けハッチングされている領域を有している。さらに、振動領域中心411dは、第1領域411hの中心と略重なるように配置されている。
また、励振電極412aは、第1方向54と交差する方向において、第1領域411hの上面と、第1領域411hの上面と第2領域411kの上面とをつなぐ側面411mと、第2領域411kの上面と、に連続して配置されている。
振動片510は、図8(c),(d)に示すように、水晶基板511の第1領域511hの厚さが、第2領域511kの厚さT4よりも厚いT5の領域と、T5よりも厚いT6の領域と、を有している。また、励振電極512aおよび513aは、上から見て、第1領域511hの厚さT6の領域および厚さT5の領域と、第2領域511kと、に重なるように配置されている。また、水晶基板511には、励振電極512a,513aで挟まれた振動領域511c、すなわち図8(c)の水晶基板511において励振電極512a,513aと重なっている領域、および図8(d)の水晶基板511において網掛けハッチングされている領域を有している。さらに、振動領域中心511dは、第1領域511hの厚さT6の領域と重なるように配置されている。
また、図8(d),(e)に示すように、励振電極512aは、第1方向54と交差する方向において、第1領域511hの厚さT6の領域の上面と、第1領域511hの厚さT6の領域の上面および厚さT5の領域の上面をつなぐ側面511mと、第1領域511hの厚さT5の領域の上面と、第1領域511hの厚さT5の領域の上面および第2領域511kの上面をつなぐ側面511nと、第2領域511kの上面と、に連続して配置されている。励振電極513aは、第1方向54と交差する方向において、第1領域511hの厚さT6の領域の下面と、第1領域511hの厚さT6の領域の下面および厚さT5の領域の下面をつなぐ側面511pと、第1領域511hの厚さT5の領域の下面と、第1領域511hの厚さT5の領域の下面および第2領域511kの下面をつなぐ側面511qと、第2領域511kの下面と、に連続して配置されている。
上述の振動片410または振動片510を用いた水晶振動子400においても、振動片310を用いた本実施形態の水晶振動子400と同様の効果を奏することができる。
なお、上述の変形例の振動片410は、上から見て、励振電極412a,413aの中心、振動領域中心411d、および第1領域411hの中心が略重なるように配置されているが、これに限らず、上から見て、振動領域中心411dと第1領域411hとが重なるように励振電極412a,413aが配置されていればよい。また、励振電極412a,413aは、上から見て、一方の励振電極が他方の励振電極の内側に配置されていてもよいし、両方の励振電極が第1領域411hのみと重なるように配置されていてもよい。
さらに、上述の変形例の振動片510は、上から見て、励振電極512a,513aの中心、振動領域中心511d、および第1領域511hの中心が略重なるように配置されているが、これに限らず、上から見て、振動領域中心511dと第1領域511hの厚さT6の領域とが重なるように励振電極512a,513aが配置されていればよい。また、励振電極512a,513aは、上から見て、一方の励振電極が他方の励振電極の内側に配置されていてもよいし、両方の励振電極が第1領域511hのみと重なるように配置されていてもよい。
<第5実施形態>
第5実施形態に係る振動デバイスの一例として、水晶振動子500について説明する。なお、上記第1実施形態に係る水晶振動子100と同じ構成要素については、同一符号を付して説明を省略し、上記第1実施形態に係る水晶振動子100と異なる部分を中心に説明する。
図9は、第5実施形態に係る振動デバイスとしての水晶振動子500の概略図であり、図9(a)は平面図、図9(b)は図9(a)のG−G断面図である。
[接合部材]
本実施形態の水晶振動子500は、図9に示すように、第1実施形態の水晶振動子100と異なり、第1接合部材141および第2接合部材142が金属バンプで形成されている。第1接合部材141の接続電極12c側、すなわち振動片10側の上面141aは、第1接合中心141bを有する。第2接合部材142の接続電極13c側、すなわち振動片10側の上面142aは、第2接合中心142bを有する。
金属バンプは、めっき法やボンディング法等によって形成されている。めっき法では、振動片10またはパッケージ20の所定の位置に、第1接合部材141および第2接合部材142が形成されるように所定のパターンを形成した後に金属をめっきすることで、金属バンプの第1接合部材141および第2接合部材142を形成することができる。
また、ボンディング法では、金(Au)等金属製のワイヤー(細線)を振動片10またはパッケージ20の第1接合部材141および第2接合部材142のそれぞれが形成される位置に接続し、接続された部分以外のワイヤーを切断することで、金属バンプの第1接合部材141および第2接合部材142を形成することができる。
なお、上記のめっき法やボンディング法に代えて、振動片10またはパッケージ20の第1接合部材141および第2接合部材142が形成される位置に金属部材を含むペースト(溶剤)を印刷やディスペンス等で塗布した後に、ペーストが塗布された振動片10またはパッケージ20を加熱することで、金属以外の溶剤成分を揮発させて、金属バンプの第1接合部材141および第2接合部材142を形成することもできる。
金属バンプの形状としては、特に限定されず、柱状(円柱状)や多角柱や円錐台等であってもよい。また、金属製のワイヤーは、金(Au)以外にも、銀(Ag)、銅(Cu)、アルミニウム(Al)、白金(Pt)などを主成分とする金属で構成されていてもよい。また、金属部材の材質は、金(Au)、銀(Ag)、銅(Cu)、アルミニウム(Al)、白金(Pt)などを主成分とする金属や、無鉛はんだや有鉛半田などの合金でもよい。
金属バンプは、接着剤等の樹脂部材と比較して、加熱や時間経過による金属バンプ内部からの気体の放出が低減する。このため、水晶振動子500が加熱されたり、水晶振動子500の製造後に時間が経過したりしても、第1接合部材141および第2接合部材142が樹脂部材で形成されている場合と比較して、第1接合部材141および第2接合部材142からの気体の放出が低減する。
また、第1接合部材141および第2接合部材142から放出される気体は、気密状態とされた内部空間26に放出されるので、放出された気体が励振電極12a,13aに付着して質量を増加させたり、放出された気体が励振電極12a,13aを変質させたりすることで、振動片10の特性、例えば、共振周波数や周波数温度特性や等価直列抵抗を変動させる場合がある。
上述のことから、加熱や時間経過により、本実施形態に係る水晶振動子500の第1接合部材141および第2接合部材142から放出される気体は、第1実施形態に係る水晶振動子100の第1接合部材41および第2接合部材42から放出される気体より低減する。従って、第1実施形態の水晶振動子100と比較して、水晶振動子500の特性、例えば、共振周波数や周波数温度特性や等価直列抵抗等の変動を低減することができる。
以上述べたように、本実施形態に係る水晶振動子500によれば、振動領域11c、第1接合部材141、および第2接合部材142が、
0<L1/L2≦0.97
の関係を、満足することにより、第1実施形態に係る水晶振動子100における効果に加えて、以下の効果を得ることができる。水晶振動子500は、第1実施形態の水晶振動子100と比較して、第1接合部材141および第2接合部材142からの気体の放出を低減することができ、水晶振動子500の特性変動、例えば、出力周波数や周波数温度特性や等価直列抵等の変動を低減することができる。
なお、本実施形態では、第1接合部材141および第2接合部材142を金属バンプで形成しているが、第1接合部材141および第2接合部材142の少なくとも一方の接合部材を金属バンプで形成し、他方の接合部材を導電性または非導電性の接着剤等で形成しても、上述の理由により、本実施形態と同様の効果を奏することができる。
また、第1接合部材141および第2接合部材142を金属バンプで形成する場合には、第1接合部材141の上面141aおよび第2接合部材142の上面142aの直径は0.05mm以下で形成することもできるため、L1の下限値としては、第1接合部材141と第2接合部材142とが電気的に接続しない範囲として、0.05mmより大きいことが好適である。すなわち、L1/L2が、
0.065<L1/L2≦0.97
の関係を満足することが好適である。
なお、本発明は上述した実施形態に限定されず、上述した実施形態に種々の変更や改良などを加えたり、上述した実施形態を2つ以上組み合わせたりすることが可能である。
<第6実施形態>
次に、第1実施形態から第5実施形態に係る水晶振動子100,200,300,400,500のいずれかを備えた第6実施形態に係る電子機器について、図10から図13を用いて説明する。なお、本実施形態の説明では、振動デバイスとして第1実施形態に係る水晶振動子100を用いた例を示している。
図10は、本発明の一実施形態に係る水晶振動子100を備える電子機器の一例としての発振器1000の構成の概略を示す概略構成図であり、図10(a)は平面図、図10(b)は図10(a)のH−H断面図を表わしている。なお、説明の便宜上、図10(a)ではリッド1020の図示を省略している。また、以下の説明では、図10(b)中の上側を「上」、下側を「下」として説明する。また、図10(b)中の各部材の上側にある面を上面、下側にある面を下面として説明する。
図10に示すように、発振器1000は、水晶振動子100、容器1010、リッド1020、発振回路1030、およびボンディングワイヤー1040などから構成されている。
容器1010は、中央部が窪んだ形状の内部空間1018が形成されており、容器1010の上面に沿って枠状にシールリング1012が、内部空間1018側にある面に複数の内部接続端子1014が、下面に複数の外部接続端子1016が、それぞれ設けられている。内部接続端子1014と外部接続端子1016とは、図示しない内部配線を介して電気的に接続されている。
水晶振動子100は、容器1010の内部空間1018側に搭載されており、図示しない内部配線を介して内部接続端子1014と電気的に接続されている。
発振回路1030は、水晶振動子100を発振させるための回路であり、上面に複数のパッド1032を有し、水晶振動子100の上面に図示しない接合部材、例えば、接着剤やはんだ等で接続されている。
ボンディングワイヤー1040は、金(Au)等の金属製のワイヤー(細線)であり、パッド1032と内部接続端子1014とを電気的に接続する。
リッド1020は、容器1010の開口を覆う平板形状を有しており、容器1010の内部空間1018が気密状態となるように、シールリング1012と接合されている。
上述の発振器1000は、複数の外部接続端子1016の少なくとも1つの端子に発振回路1030を動作させるための電圧が印加されて、複数の外部接続端子1016の他の端子の少なくとも1つの端子から、発振回路1030から出力される発振信号が出力される。
上述のように、電子機器の一例として発振器1000に、本発明の一実施形態に係る水晶振動子100を備えることにより、発振器の基準周波数源として水晶振動子100から安定した周波数信号が出力されるため、発振器1000の動作の信頼性を向上させることができる。
図11は、第1実施形態に係る水晶振動子100を備える電子機器の一例としてのモバイル型(又はノート型)のパーソナルコンピューター1100の構成の概略を示す斜視図である。図11に示すように、パーソナルコンピューター1100は、キーボード1102を備えた本体部1104と、表示部1106を備えた表示ユニット1108とにより構成され、表示ユニット1108は、本体部1104に対しヒンジ構造部を介して回動可能に支持されている。このようなパーソナルコンピューター1100には、水晶振動子100が内蔵されている。
上述のように、電子機器の一例としてのモバイル型(又はノート型)のパーソナルコンピューター1100に、本発明の一実施形態に係る水晶振動子100を、例えば、クロック源として備えることにより、モバイル型のパーソナルコンピューター1100に供給されるクロック源として水晶振動子100から安定した周波数信号が出力されるため、モバイル型のパーソナルコンピューター1100の動作の信頼性を向上させることができる。
図12は、第1実施形態に係る水晶振動子100を備える電子機器の一例としての携帯電話機1200(PHSも含む)の構成の概略を示す斜視図である。図12に示すように、携帯電話機1200は、複数の操作ボタン1202、受話口1204および送話口1206を備え、操作ボタン1202と受話口1204との間には、表示部1208が配置されている。このような携帯電話機1200には、水晶振動子100が内蔵されている。
上述のように、電子機器の一例としての携帯電話機1200(PHSを含む)に、本発明の一実施形態に係る水晶振動子100を、例えば、クロック源として備えることにより、携帯電話機1200に供給されるクロック源として水晶振動子100から安定した周波数信号が出力されるため、携帯電話機1200の動作の信頼性を向上させることができる。
図13は、第1実施形態に係る水晶振動子100を備える電子機器の一例としてのデジタルカメラ1300の構成の概略を示す斜視図である。なお、図13には、外部機器との接続についても簡易的に示されている。ここで、従来のフィルムカメラは、被写体の光像により銀塩写真フィルムを感光するのに対し、デジタルカメラ1300は、被写体の光像をCCD(Charge Coupled Device)などの撮像素子により光電変換して撮像信号(画像信号)を生成する。
デジタルカメラ1300におけるケース1302(ボディー)の背面には、表示部1304が設けられ、CCDによる撮像信号に基づいて表示を行う構成になっており、表示部1304は、被写体を電子画像として表示するファインダーとして機能する。また、ケース1302の正面側(図中裏面側)には、光学レンズ(撮像光学系)やCCDなどを含む受光ユニット1306が設けられている。
撮影者が表示部1304に表示された被写体像を確認し、シャッターボタン1308を押下すると、その時点におけるCCDの撮像信号が、メモリー1310に転送・格納される。また、このデジタルカメラ1300においては、ケース1302の側面に、ビデオ信号の出力端子1312と、データ通信用の入出力端子1314とが設けられている。そして、図示されるように、ビデオ信号の出力端子1312にはテレビモニター1410が、データ通信用の入出力端子1314にはパーソナルコンピューター1420が、それぞれ必要に応じて接続される。さらに、所定の操作により、メモリー1310に格納された撮像信号が、テレビモニター1410や、パーソナルコンピューター1420に出力される構成になっている。このようなデジタルカメラ1300には、水晶振動子100が内蔵されている。
上述のように、電子機器の一例としてのデジタルカメラ1300に、本発明の一実施形態に係る水晶振動子100を、例えば、クロック源として備えることにより、デジタルカメラ1300に供給されるクロック源として水晶振動子100から安定した周波数信号が出力されるため、デジタルカメラ1300の動作の信頼性を向上させることができる。
なお、第1実施形態に係る水晶振動子100は、図10の発振器1000、図11のパーソナルコンピューター1100(モバイル型パーソナルコンピューター)、図12の携帯電話機1200、図13のデジタルカメラ1300の他にも、他の電子機器に適用することができる。
他の電子機器の例としては、インクジェット式吐出装置(例えばインクジェットプリンター)、ラップトップ型パーソナルコンピューター、タブレット型パーソナルコンピューター、ルーターやスイッチなどのストレージエリアネットワーク機器、ローカルエリアネットワーク機器、移動体端末基地局用機器、テレビ、ビデオカメラ、ビデオレコーダー、カーナビゲーション装置、リアルタイムクロック装置、ページャー、電子手帳(通信機能付も含む)、電子辞書、電卓、電子ゲーム機器、ワードプロセッサー、ワークステーション、テレビ電話、防犯用テレビモニター、電子双眼鏡、POS端末、医療機器(例えば電子体温計、血圧計、血糖計、心電図計測装置、超音波診断装置、電子内視鏡)、魚群探知機、各種測定機器、計器類(例えば、車両、航空機、船舶の計器類)、フライトシミュレーター、ヘッドマウントディスプレイ、モーショントレース、モーショントラッキング、モーションコントローラー、PDR(歩行者位置方位計測)などが挙げられる。
<第7実施形態>
次に、第1実施形態から第5実施形態に係る水晶振動子100,200,300,400,500のいずれかを備えた第7実施形態に係る移動体について、図14を用いて説明する。なお、本実施形態の説明では、振動デバイスとして第1実施形態に係る水晶振動子100を用いた例を示している。
図14は、第1実施形態に係る水晶振動子100を備える移動体の一例としての自動車1500を概略的に示す斜視図である。
自動車1500には第1実施形態に係る水晶振動子100が搭載されている。図14に示すように、移動体としての自動車1500には、水晶振動子100を内蔵してタイヤ1504などを制御する電子制御ユニット1510が車体1502に搭載されている。また、本発明の一実施形態に係る水晶振動子100は、他にもキーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ブレーキシステム、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム、などの電子制御ユニット(ECU:Electronic Control Unit)に広く適用できる。
上記のように、移動体の一例としての自動車1500に、本発明の一実施形態に係る水晶振動子100を、例えば、クロック源として備えることにより、自動車1500および電子制御ユニット1510のうち少なくとも一方に供給されるクロック源として水晶振動子100から安定した周波数信号が出力されるため、自動車1500および電子制御ユニット1510のうち少なくとも一方の動作の信頼性を向上させることができる。