JP6585626B2 - 遠位スネア構造を有するスネア器具 - Google Patents
遠位スネア構造を有するスネア器具 Download PDFInfo
- Publication number
- JP6585626B2 JP6585626B2 JP2016565331A JP2016565331A JP6585626B2 JP 6585626 B2 JP6585626 B2 JP 6585626B2 JP 2016565331 A JP2016565331 A JP 2016565331A JP 2016565331 A JP2016565331 A JP 2016565331A JP 6585626 B2 JP6585626 B2 JP 6585626B2
- Authority
- JP
- Japan
- Prior art keywords
- lanyard
- snare
- wire
- base portion
- bent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005452 bending Methods 0.000 claims description 23
- 239000002245 particle Substances 0.000 description 9
- 230000008602 contraction Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 241001465754 Metazoa Species 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000004026 adhesive bonding Methods 0.000 description 3
- 208000007536 Thrombosis Diseases 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000004744 fabric Substances 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- HZEWFHLRYVTOIW-UHFFFAOYSA-N [Ti].[Ni] Chemical compound [Ti].[Ni] HZEWFHLRYVTOIW-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 231100000989 no adverse effect Toxicity 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
Images

















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/32056—Surgical snare instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/221—Gripping devices in the form of loops or baskets for gripping calculi or similar types of obstructions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00358—Snares for grasping
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/221—Gripping devices in the form of loops or baskets for gripping calculi or similar types of obstructions
- A61B2017/2215—Gripping devices in the form of loops or baskets for gripping calculi or similar types of obstructions having an open distal end
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Vascular Medicine (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Surgical Instruments (AREA)
Description
Claims (7)
- − シャフト領域と、
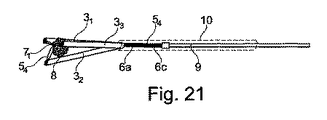
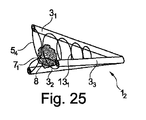
− 遠位で前記シャフト領域に隣接するスネア領域のスネア構造(1)であって、該スネア構造(1)は、遠位開放スネアを形成する開放位置から引っ張って閉鎖可能であり、前記スネア構造(1)の開放位置において、遠位前方に且つ半径方向外側に放射形状で延在してスネアを形成する複数の柔軟性屈曲チューブ(31、32、33)を有し、該複数の柔軟性屈曲チューブの遠位端(41、42、43)は、複数の締め縄状ワイヤ(51、52、53)が引っ張られることによって前記スネア構造(1)を閉鎖するように、半径方向内側に互いの方へ移動可能である、スネア構造と、
− 複数の締め縄状ワイヤ(51、52、53)であって、該複数の締め縄状ワイヤの各々は、第1ベース部分(6a)が前記シャフト領域から屈曲チューブ(31、32、33)の1つを緩やかに通って該屈曲チューブの遠位端(41、42、43)まで延在し、該遠位端から締め縄状アーチ(6b)が同一の又は別の屈曲チューブ(31、32、33)の遠位端(41、42、43)まで延在し、該遠位端から第2ベース部分(6c)が前記同一の又は別の屈曲チューブ(31、32、33)を緩やかに通って前記シャフト領域まで戻り、前記締め縄状ワイヤの前記第1ベース部分及び前記第2ベース部分(6a、6c)の少なくとも1つが各屈曲チューブ(31、32、33)を通って延在する、複数の締め縄状ワイヤと、
を有し、
前記複数の締め縄状ワイヤ(51、52、53)の前記締め縄状アーチ(6b)が、前記スネア構造(1)の前記開放位置で、かつ円周方向に延在する、
スネア器具(13)において、
各々の締め縄状ワイヤ(51、52、53)の前記第1ベース部分及び前記第2ベース部分(6a、6c)の少なくとも1つが、同一の方向に且つ同期して軸方向に移動可能となるように配置されると共に、前記屈曲チューブ(31、32、33)内を案内され、
複数の締め縄状アーチ(6b)が交差締め縄状構造を形成し、少なくとも1つの締め縄状アーチ(6b)が、第1の部分において第1の他の締め縄状アーチ(6b)の前方に延在し、第2の部分において前記第1の他の締め縄状アーチ(6b)の後方又は第2の他の締め縄状アーチ(6b)の後方に延在する、ことを特徴とするスネア器具。 - 前記締め縄状ワイヤ(51、52、53)の少なくとも1つの前記締め縄状アーチ(6b)が、前記スネア構造(1)の前記円周方向において、前記スネア構造(1)の前記円周方向長さに等しい円周方向長さで、延在することをさらに特徴とする請求項1に記載のスネア器具。
- 前記締め縄状ワイヤの前記第1ベース部分及び前記第2ベース部分(6a、6c)の少なくとも2つが、互いに接続されて、前記屈曲チューブ(31、32、33)の少なくとも1つの中に延在することをさらに特徴とする請求項1又は2に記載のスネア器具。
- 前記屈曲チューブ(31、32、33)の少なくとも1つが、らせん状ばねチューブ(141、142、143)によって形成されることをさらに特徴とする請求項1〜3のいずれか一項に記載のスネア器具。
- 締め縄状ワイヤの前記第1ベース部分及び前記第2ベース部分(6a、6c)の1つが前記屈曲チューブ(31、32、33)の少なくとも1つの中に延在することをさらに特徴とする請求項1〜4のいずれか一項に記載のスネア器具。
- 前記締め縄状ワイヤ(51、52、53)が、前記シャフト領域の全体を通って器具の近位制御領域まで延在するプルロッド(9)の遠位端に結合される接続部位まで近位に延在するか、又は、前記締め縄状ワイヤ(51、52、53)が、前記シャフト領域の全体を通って前記器具の近位制御領域まで近位に延在することをさらに特徴とする請求項1〜5のいずれか一項に記載のスネア器具。
- 前記スネア構造(1)が柔軟性捕捉用網構造(131)を有し、該柔軟性捕捉用網構造が、前記屈曲チューブ(31、32、33)によって形成される捕捉空間内に配置され、且つ、前記屈曲チューブに保持されることをさらに特徴とする請求項1〜6のいずれか一項に記載のスネア器具。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014208168.8A DE102014208168A1 (de) | 2014-04-30 | 2014-04-30 | Fangkelchinstrument mit distaler Fangkelchstruktur |
| DE102014208168.8 | 2014-04-30 | ||
| PCT/DK2015/050110 WO2015165474A1 (en) | 2014-04-30 | 2015-04-29 | A snare instrument with a distal snare structure |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017516532A JP2017516532A (ja) | 2017-06-22 |
| JP2017516532A5 JP2017516532A5 (ja) | 2018-05-10 |
| JP6585626B2 true JP6585626B2 (ja) | 2019-10-02 |
Family
ID=53174750
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016565331A Active JP6585626B2 (ja) | 2014-04-30 | 2015-04-29 | 遠位スネア構造を有するスネア器具 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10335185B2 (ja) |
| EP (2) | EP3136997B1 (ja) |
| JP (1) | JP6585626B2 (ja) |
| CN (1) | CN106232039B (ja) |
| DE (1) | DE102014208168A1 (ja) |
| WO (1) | WO2015165474A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014208168A1 (de) | 2014-04-30 | 2015-11-19 | Epflex Feinwerktechnik Gmbh | Fangkelchinstrument mit distaler Fangkelchstruktur |
| US10111677B2 (en) * | 2014-12-11 | 2018-10-30 | Boston Scientific Scimed, Inc. | Retrieval devices and related methods of use |
| US11653942B2 (en) * | 2015-03-24 | 2023-05-23 | Boston Scientific Scimed, Inc. | Retrieval devices and related methods of use |
| DE102017205725B4 (de) | 2017-04-04 | 2018-12-06 | Epflex Feinwerktechnik Gmbh | Medizinisches Greiferinstrument |
| EP3700615B1 (en) * | 2017-10-26 | 2022-08-24 | Teleflex Life Sciences Limited | Subintimal catheter device and assembly |
| JP7281475B2 (ja) | 2017-11-09 | 2023-05-25 | 11 ヘルス アンド テクノロジーズ リミテッド | ストーマ監視システムおよび方法 |
| USD893514S1 (en) | 2018-11-08 | 2020-08-18 | 11 Health And Technologies Limited | Display screen or portion thereof with graphical user interface |
| US11006973B2 (en) * | 2019-01-17 | 2021-05-18 | Olympus Corporation | Method for constricting tissue |
Family Cites Families (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1414809B2 (de) | 1959-02-26 | 1970-04-16 | Hughes Aircraft Company, Culver City, Calif. (V.St.A.) | Elektronenstrahl-Halbtonspeicherröhre |
| DE4317914A1 (de) | 1993-05-28 | 1994-12-01 | Haas Carl Gmbh & Co | Flexibles Endoskoprohr |
| US5656011A (en) | 1994-04-28 | 1997-08-12 | Epflex Feinwerktechnik Gmbh | Endoscope tube system |
| US6350266B1 (en) | 1995-02-02 | 2002-02-26 | Scimed Life Systems, Inc. | Hybrid stone retrieval device |
| DE19512047C2 (de) | 1995-03-31 | 1998-09-03 | Epflex Feinwerktech Gmbh | Führungsdraht, insbesondere für ein chirurgisches Instrument |
| DE19607595C2 (de) | 1996-02-29 | 2000-01-20 | Epflex Feinwerktech Gmbh | Führungsdrahtkern, insbesondere für ein chirurgisches Instrument |
| US5954713A (en) | 1996-07-12 | 1999-09-21 | Newman; Fredric A. | Endarterectomy surgical instruments and procedure |
| DE19647761C1 (de) | 1996-11-19 | 1998-01-08 | Epflex Feinwerktech Gmbh | Handbedieneinrichtung für ein Endoskop |
| US5906622A (en) * | 1997-04-29 | 1999-05-25 | Lippitt; Robert G. | Positively expanded and retracted medical extractor |
| CA2287971C (en) | 1997-04-29 | 2007-04-24 | Raymond F. Lippitt | Annularly expanding and retracting gripping and releasing mechanism |
| DE19751194C1 (de) | 1997-11-19 | 1999-05-06 | Epflex Feinwerktech Gmbh | Drahtdispenser für elastische Drähte |
| DE19823414A1 (de) | 1998-05-26 | 1999-06-17 | Epflex Feinwerktech Gmbh | Führungsdraht mit Spiralfederkomplex |
| DE19928272C2 (de) | 1999-06-21 | 2003-08-14 | Ep Flex Feinwerktechnik Gmbh | Elastisch biegbares Endoskoprohrteil |
| DE10113713C1 (de) | 2001-03-19 | 2002-12-05 | Epflex Feinwerktech Gmbh | Flexibles Endoskoprohr aus Einzelgliedern |
| US7101379B2 (en) | 2001-04-02 | 2006-09-05 | Acmi Corporation | Retrieval basket for a surgical device and system and method for manufacturing same |
| DE10138953B4 (de) | 2001-08-03 | 2005-03-24 | Epflex Feinwerktechnik Gmbh | Führungsdraht mit Kerndraht und Schraubenfederummantelung |
| DE10160922A1 (de) | 2001-12-06 | 2003-05-15 | Epflex Feinwerktech Gmbh | Biegbares Endoskoprohrstück |
| US7041108B2 (en) | 2002-05-28 | 2006-05-09 | Lippitt Extractor Company, Llc | Grasper mechanism with biased fixed flexure elements |
| DE10243261B4 (de) | 2002-09-17 | 2006-03-09 | Epflex Feinwerktechnik Gmbh | Führungsdraht mit Markierungsmuster |
| DE102004055375B4 (de) | 2004-11-08 | 2007-12-06 | Epflex Feinwerktechnik Gmbh | Mehrdrahteinheit und Herstellungsverfahren hierfür |
| DE102005022688B4 (de) | 2005-05-12 | 2011-06-30 | EPflex Feinwerktechnik GmbH, 72581 | Führungsdraht für ein medizinisches Instrument |
| DE102005030010B4 (de) | 2005-06-17 | 2007-12-27 | Epflex Feinwerktechnik Gmbh | Steinfangkorbeinheit |
| US8157818B2 (en) | 2005-08-01 | 2012-04-17 | Ension, Inc. | Integrated medical apparatus for non-traumatic grasping, manipulating and closure of tissue |
| DE102005040214A1 (de) | 2005-08-15 | 2007-03-01 | Epflex Feinwerktechnik Gmbh | Mehrdrahteinheit und Herstellungsverfahren hierfür |
| DE102005042216A1 (de) | 2005-09-05 | 2007-03-08 | Andramed Gmbh | Katheter mit festverbundener Nase in Konstruktion mit einer Schlinge, zur interventionellen Fremdkörperbergung ohne offenes Ende aus Körpergefäßen oder Körperhohlräumen |
| DE102006002531A1 (de) | 2006-01-11 | 2007-07-12 | Epflex Feinwerktechnik Gmbh | Mehrdrahtinstrument, insbesondere für Endoskope |
| DE102006018489A1 (de) | 2006-02-15 | 2007-10-25 | Epflex Feinwerktechnik Gmbh | Gesteuert versteifbarer Schlauch |
| US20070250149A1 (en) | 2006-04-21 | 2007-10-25 | Abbott Laboratories | Stiffening Support Catheters and Methods for Using the Same |
| DE102006024095A1 (de) | 2006-05-17 | 2007-12-06 | Epflex Feinwerktechnik Gmbh | Druckanschlussvorrichtung für eine Führungsdrahteinheit |
| DE102006024094A1 (de) | 2006-05-17 | 2007-11-22 | Epflex Feinwerktechnik Gmbh | Gesteuert versteifbare Führungsdrahteinheit |
| DE102006047675A1 (de) | 2006-09-28 | 2008-04-03 | Epflex Feinwerktechnik Gmbh | Führungsdraht mit Kern und distaler Ummantelung |
| US9072514B2 (en) | 2006-10-05 | 2015-07-07 | Thomas P. Knapp | Shape memory filament for suture management |
| US20080269774A1 (en) * | 2006-10-26 | 2008-10-30 | Chestnut Medical Technologies, Inc. | Intracorporeal Grasping Device |
| DE102007005559B4 (de) | 2007-01-24 | 2014-11-06 | Epflex Feinwerktechnik Gmbh | Führungsdraht mit elektrischem Funktionselement |
| US8540648B2 (en) | 2008-03-11 | 2013-09-24 | Epflex Feinwerktechnik Gmbh | Guide wire with marking pattern |
| WO2009121379A1 (de) | 2008-04-01 | 2009-10-08 | Coloplast A/S | Drahtkorbeinheit mit fixierscheibenelement |
| JP5191338B2 (ja) | 2008-10-01 | 2013-05-08 | Hoya株式会社 | 内視鏡用バイポーラ型高周波スネア |
| CN102365058A (zh) | 2009-02-06 | 2012-02-29 | 奥林巴斯医疗株式会社 | 处理器具 |
| DE102009022379A1 (de) | 2009-05-22 | 2010-11-25 | Epflex Feinwerktechnik Gmbh | Wechselgriffsystem, insbesondere für medizinische Instrumente |
| DE102009037827A1 (de) | 2009-08-10 | 2011-02-17 | Epflex Feinwerktechnik Gmbh | Medizinisches Katheterinstrument |
| DE102010007194A1 (de) | 2010-02-05 | 2011-08-11 | EPflex Feinwerktechnik GmbH, 72581 | Handbetätigtes Funktionsschlauchelement und Bediengriff hierfür |
| DE102010010798A1 (de) | 2010-03-09 | 2011-09-15 | Epflex Feinwerktechnik Gmbh | Handbetätigtes Funktionsschlauchinstrument und Bedieneinrichtung hierfür |
| US8469970B2 (en) * | 2011-07-11 | 2013-06-25 | Great Aspirations Ltd. | Apparatus for entrapping and extracting objects from body cavities |
| US20130018385A1 (en) * | 2011-07-11 | 2013-01-17 | Boston Scientific Scimed, Inc. | Polypectomy Snare Device |
| CN103717155B (zh) * | 2011-08-01 | 2016-08-17 | 奥林巴斯株式会社 | 处理器具 |
| DE102011081445A1 (de) | 2011-08-23 | 2013-02-28 | Epflex Feinwerktechnik Gmbh | Medizinischer Führungsdraht und Herstellungsverfahren |
| DE102012208888B4 (de) | 2012-05-25 | 2016-09-01 | Epflex Feinwerktechnik Gmbh | Drahtfangkorbinstrument |
| DE102012214785A1 (de) | 2012-08-20 | 2014-02-20 | Epflex Feinwerktechnik Gmbh | Medizinischer Führungsdraht mit MR-Marker |
| DE102012222356B4 (de) | 2012-12-05 | 2017-03-16 | Epflex Feinwerktechnik Gmbh | Medizinisches Steinfangkorbinstrument |
| WO2015034832A1 (en) | 2013-09-03 | 2015-03-12 | Boston Scientific Scimed, Inc. | Medical retrieval devices and related methods of use |
| CA2936455A1 (en) * | 2014-01-10 | 2015-07-16 | Boston Scientific Scimed, Inc. | Expandable basket retrieval device |
| DE102014205366B4 (de) | 2014-03-21 | 2019-03-28 | Coloplast A/S | Fangdrahtinstrument mit Fangdrahtstruktur aus Rohrstück |
| DE102014207344A1 (de) | 2014-04-16 | 2015-10-22 | Epflex Feinwerktechnik Gmbh | Fangdrahtinstrument mit distaler Fangstruktur |
| DE102014208168A1 (de) | 2014-04-30 | 2015-11-19 | Epflex Feinwerktechnik Gmbh | Fangkelchinstrument mit distaler Fangkelchstruktur |
| DE102014222600A1 (de) | 2014-11-05 | 2016-05-12 | Epflex Feinwerktechnik Gmbh | Medizinisches Fangdrahtinstrument |
-
2014
- 2014-04-30 DE DE102014208168.8A patent/DE102014208168A1/de not_active Withdrawn
-
2015
- 2015-04-29 EP EP15721559.1A patent/EP3136997B1/en active Active
- 2015-04-29 EP EP18177501.6A patent/EP3409220B1/en active Active
- 2015-04-29 WO PCT/DK2015/050110 patent/WO2015165474A1/en active Application Filing
- 2015-04-29 US US15/306,768 patent/US10335185B2/en active Active
- 2015-04-29 CN CN201580022484.2A patent/CN106232039B/zh not_active Expired - Fee Related
- 2015-04-29 JP JP2016565331A patent/JP6585626B2/ja active Active
-
2019
- 2019-05-16 US US16/413,639 patent/US11337721B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170049472A1 (en) | 2017-02-23 |
| JP2017516532A (ja) | 2017-06-22 |
| US11337721B2 (en) | 2022-05-24 |
| EP3409220A1 (en) | 2018-12-05 |
| WO2015165474A1 (en) | 2015-11-05 |
| CN106232039A (zh) | 2016-12-14 |
| EP3409220B1 (en) | 2022-03-30 |
| EP3136997B1 (en) | 2020-11-18 |
| DE102014208168A1 (de) | 2015-11-19 |
| US10335185B2 (en) | 2019-07-02 |
| CN106232039B (zh) | 2019-04-16 |
| US20190262026A1 (en) | 2019-08-29 |
| EP3136997A1 (en) | 2017-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6585626B2 (ja) | 遠位スネア構造を有するスネア器具 | |
| US20170143358A1 (en) | Retrieval device | |
| JP6194381B2 (ja) | 回収デバイス | |
| RU2011106747A (ru) | Многослойное медицинское устройство для лечения участка-мишени и связанный с ним способ | |
| JP2008036418A5 (ja) | ||
| US9795401B2 (en) | Medical retrieval devices and related methods of use | |
| US9924960B2 (en) | Endoscope treatment tool | |
| US20140066948A1 (en) | Device for Retrieving a Body from a Tubular Structure | |
| JP6749336B2 (ja) | 回収デバイス及び関連の使用方法 | |
| EP4035608A1 (en) | Medical instrument | |
| JP2017516532A5 (ja) | ||
| JP4959787B2 (ja) | 人工血管ステント挿入装置 | |
| US20160089170A1 (en) | Invertable medical retrieval devices and methods | |
| KR101586615B1 (ko) | 분지형 스텐트 | |
| US20240307065A1 (en) | Endoscopic Loop Systems and Methods of Use | |
| JP3248464U (ja) | 組織に力を加えることにより組織を治療するための機器 | |
| WO2017072492A1 (en) | Colonic polyp removal | |
| JP2005204807A (ja) | バスケット型把持鉗子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180322 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181204 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6585626 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |