JP6570431B2 - コネクタ及びコネクタ組立体 - Google Patents
コネクタ及びコネクタ組立体 Download PDFInfo
- Publication number
- JP6570431B2 JP6570431B2 JP2015223146A JP2015223146A JP6570431B2 JP 6570431 B2 JP6570431 B2 JP 6570431B2 JP 2015223146 A JP2015223146 A JP 2015223146A JP 2015223146 A JP2015223146 A JP 2015223146A JP 6570431 B2 JP6570431 B2 JP 6570431B2
- Authority
- JP
- Japan
- Prior art keywords
- connector
- end position
- lock
- movable member
- movement range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/639—Additional means for holding or locking coupling parts together, after engagement, e.g. separate keylock, retainer strap
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/627—Snap or like fastening
- H01R13/6275—Latching arms not integral with the housing
Description
前後方向に沿って前方に移動することで、相手側嵌合部と相手側ロック部とを備えた相手側コネクタと嵌合可能なコネクタであって、
前記コネクタは、主部材と、可動部材と、操作部材とを備えており、
前記主部材は、コネクタ本体を備えており、
前記コネクタ本体は、嵌合部を備えており、
前記嵌合部は、前記コネクタと前記相手側コネクタとが互いに嵌合した嵌合状態において前記相手側嵌合部と嵌合し、
前記可動部材は、前記前後方向における移動範囲の前端位置と後端位置との間を、前記主部材に対して相対的に移動可能であり、
前記操作部材は、前記前後方向における操作移動範囲の前端位置と後端位置との間を、前記主部材に対して相対的に移動可能であり、且つ、前記前後方向において前記可動部材に対して相対的に移動可能であり、
前記可動部材は、支持部と、ロック部とを備えており、
前記支持部は、弾性変形可能であり、
前記ロック部は、前記支持部に支持されており、
前記嵌合状態において前記操作部材が前記操作移動範囲の前記前端位置に位置し且つ前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記ロック部は、前記相手側ロック部と共に前記嵌合状態をロックしており、
前記嵌合状態において前記操作部材が前記操作移動範囲の前記前端位置から所定距離だけ後方に位置し且つ前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記嵌合状態のロックが解除されている
コネクタを提供する。
前記操作部材が前記操作移動範囲の前記後端位置に位置したとき、前記可動部材は、前記移動範囲の前記後端位置に位置する
コネクタを提供する。
前記主部材は、前進操作規制部と、後退操作規制部とを備えており、
前記前進操作規制部は、前記操作部材の前方への移動を規制して、前記操作移動範囲の前記前端位置を規定しており、
前記後退操作規制部は、前記操作部材の後方への移動を規制して、前記操作移動範囲の前記後端位置を規定している
コネクタを提供する。
前記主部材は、前進規制部を備えており、
前記前進規制部は、前記可動部材の前方への移動を規制して、前記移動範囲の前記前端位置を規定している
コネクタを提供する。
前記操作部材は、前記可動部材に対して前記所定距離だけ相対的に移動可能であり、
前記操作移動範囲における前記前端位置と前記後端位置との間の前記操作部材の移動距離は、前記移動範囲における前記前端位置と前記後端位置との間の前記可動部材の移動距離+前記所定距離である
コネクタを提供する。
前記ロック部は、前記前後方向と交差する方向に延びるロック爪である
コネクタを提供する。
前記可動部材の前記支持部には、被操作部が設けられており、
前記操作部材には、操作突部が設けられており、
前記操作突部は、前記前後方向と直交する横方向の外側に突出しており、
前記嵌合状態において前記操作部材が前記操作移動範囲の前記前端位置から前記所定距離だけ後方に位置し且つ前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記被操作部は、前記横方向において前記操作突部の外側に位置し、前記ロック部は、前記横方向において前記相手側ロック部の外側に移動して前記嵌合状態のロックを解除している
コネクタを提供する。
前記可動部材は、ロック部材を備えており、
前記ロック部材は、曲げを有する一枚板であり、
前記支持部及び前記ロック部は、前記ロック部材の一部であり、
前記被操作部は、前記ロック部材に形成された湾曲部である
コネクタを提供する。
前記主部材には、維持部が設けられており、
前記操作部材が前記操作移動範囲の前記前端位置から前記所定距離を所定付加距離だけ超えて後方に位置し且つ前記可動部材が前記移動範囲の前記前端位置から前記所定付加距離だけ後方に位置しているとき、前記被操作部は、前記横方向において前記維持部の外側に位置し、前記ロック部の前記横方向の外側に移動した状態が維持されている
コネクタを提供する。
前記維持部には、仮保持部が設けられており、
前記仮保持部は、前記操作部材の前記操作突部を越えて前記横方向の外側に位置しており、
前記操作部材が前記操作移動範囲の前記後端位置に位置しているとき、前記被操作部は、前記横方向において前記仮保持部の外側に位置している
コネクタを提供する。
前記維持部には、仮保持部が設けられており、
前記仮保持部は、前記操作部材の前記操作突部を越えて前記横方向の外側に突出しており、
前記操作部材が前記操作移動範囲の前記後端位置に位置しているとき、前記仮保持部は、前記被操作部の前方を部分的に塞いでいる
コネクタを提供する。
前記維持部は、その前端部を除き、前記操作部材の前記操作突部を越えて前記横方向の外側に位置している
コネクタを提供する。
前記可動部材は、前記ロック部を2つ備えており、
前記コネクタ本体の前記嵌合部は、前記横方向において、2つの前記ロック部の間に位置している
コネクタを提供する。
前記可動部材は、カバーを備えており、
前記嵌合状態のロックが解除されたとき、前記ロック部は、前記カバー内に受容される
コネクタを提供する。
前記可動部材は、前進力受部と、後退力受部とを備えており、
前記操作部材は、前進力付加部と、後退力付加部とを備えており、
前記前後方向と直交する直交平面における前記前進力付加部の位置は、前記直交平面における前記前進力受部の位置と重なっており、
前記操作部材が前記操作移動範囲の前記後端位置に位置し、且つ、前記可動部材が前記移動範囲の前記後端位置に位置しているとき、前記前進力付加部は、前記前進力受部から後方に離れて前記前後方向において前記前進力受部と対向しており、
前記操作部材を前記操作移動範囲の前記後端位置から前方に移動すると、前記前進力付加部は、前記前進力受部に前方に向かう力を付加し、
前記直交平面における前記後退力付加部の位置は、前記直交平面における前記後退力受部の位置と重なっており、
前記操作部材が前記操作移動範囲の前記前端位置に位置し、且つ、前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記後退力付加部は、前記後退力受部から前方に離れて前記前後方向において前記後退力受部と対向しており、
前記操作部材を前記操作移動範囲の前記前端位置から後方に移動すると、前記後退力付加部は、前記後退力受部に後方に向かう力を付加する
コネクタを提供する。
前記操作部材は、前記主部材の内部に少なくとも部分的に収容されている
コネクタを提供する。
前記可動部材は、前記主部材の内部に少なくとも部分的に収容されており、
前記操作部材は、前記可動部材の内部に少なくとも部分的に収容されている
コネクタを提供する。
前記主部材は、前記操作部材の内部に少なくとも部分的に収容されている
コネクタを提供する。
前記可動部材は、前記操作部材の内部に少なくとも部分的に収容されており、
前記主部材は、前記可動部材の内部に少なくとも部分的に収容されている
コネクタを提供する。
第1乃至第19のいずれかのコネクタと、前記相手側コネクタとを備えたコネクタ組立体であって、
前記相手側コネクタは、前記相手側嵌合部と、前記相手側ロック部とを備えている
コネクタ組立体を提供する。
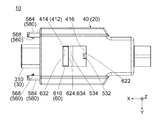
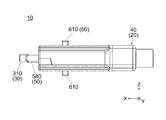
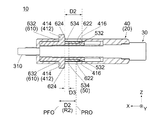
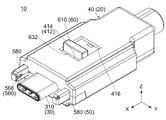
図1を参照すると、本発明の第1の実施の形態によるコネクタ組立体1は、コネクタ10と、相手側コネクタ80とを備えている。コネクタ10は、前後方向(X方向)に沿って前方(+X方向)に移動することで、相手側コネクタ80と嵌合可能である。本実施の形態によるコネクタ10は、ケーブル70に接続されたケーブルコネクタであり、相手側コネクタ80は、相手側回路基板890上に搭載された基板コネクタである。また、本実施の形態によるコネクタ10はプラグであり、相手側コネクタ80はレセプタクルである。但し、本発明は、これに限られず、様々なコネクタ及び相手側コネクタに適用可能である。例えば、相手側コネクタ80は、電子機器(図示せず)の一部であってもよい。
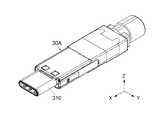
図2及び図33を参照すると、本発明の第2の実施の形態によるコネクタ組立体1Aは、コネクタ10Aと、相手側コネクタ80とを備えている。コネクタ10Aは、前後方向(X方向)に沿って前方に移動することで、相手側コネクタ80と嵌合可能である。本実施の形態によるコネクタ10Aは、コネクタ10(図1参照)と同様に、ケーブル70に接続されたケーブルコネクタであり、且つプラグである。
10,10A コネクタ
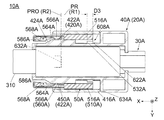
20,20A 主部材
30,30A コネクタ本体
310 嵌合部
320 コンタクト
40,40A フード
46,46A 側部
48,48A 収容部
410,410A 上フード
412 操作規制孔
414,414A 前進操作規制部
416,416A 後退操作規制部
420 仕切り壁
420A 突出部
422,422A 維持部
424,424A 前端部
426,426A 後部
430,430A 前進規制部
440 ガイド溝
450,450A 仮保持部
450X 仮保持部(リブ)
460,460A 下フード
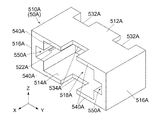
50,50A 可動部材
510,510A 本体部材
512,512A 上部
514,514A 下部
516,516A 側部
518,518A 中空部
522,522A 圧入溝
524 圧入孔
532,532A 前進力受部
534,534A 後退力受部
540A 前進被規制部
550A ガイド溝
560,560A ロック部材
562,562A 圧入部
564,564A 支持部
566,566A 被操作部
568,568A ロック部
580,580A カバー部材
582,582A 圧入部
584,584A カバー
586,586A 受容部
590 前進被規制部
60,60A 操作部材
602,602A 上部
604,604A 下部
606,606A 側部
608,608A 中空部
610,610A 操作部
622,622A 前進力付加部
624,624A 後退力付加部
632,632A 前進操作被規制部
634,634A 後退操作被規制部
640,640A 操作突部
642,642A 傾斜面
644,644A 外側面
650A ガイド溝
R1 移動範囲
D1 移動距離
PF 前端位置
PR 後端位置
R2 操作移動範囲
D2 移動距離
PFO 前端位置
PRO 後端位置
D3 所定距離
D4 所定付加距離
D5 移動可能距離
70 ケーブル
80,80X 相手側コネクタ
810 相手側コネクタ本体
812 相手側嵌合部
814 相手側コンタクト
820 相手側シェル
822 側板
824 相手側ロック部(ロック孔)
828 被固定部
880 筐体
882,884 取付孔
890 相手側回路基板
Claims (20)
- 前後方向に沿って前方に移動することで、相手側嵌合部と相手側ロック部とを備えた相手側コネクタと嵌合可能なコネクタであって、
前記コネクタは、主部材と、可動部材と、操作部材とを備えており、
前記主部材は、コネクタ本体を備えており、
前記コネクタ本体は、嵌合部を備えており、
前記嵌合部は、前記コネクタと前記相手側コネクタとが互いに嵌合した嵌合状態において前記相手側嵌合部と嵌合し、
前記可動部材は、前記前後方向における移動範囲の前端位置と後端位置との間を、前記主部材に対して相対的に移動可能であり、
前記操作部材は、前記前後方向における操作移動範囲の前端位置と後端位置との間を、前記主部材に対して相対的に移動可能であり、且つ、前記前後方向において前記可動部材に対して相対的に移動可能であり、
前記可動部材は、支持部と、ロック部とを備えており、
前記支持部は、弾性変形可能であり、
前記ロック部は、前記支持部に支持されており、
前記嵌合状態において前記操作部材が前記操作移動範囲の前記前端位置に位置し且つ前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記ロック部は、前記相手側ロック部と共に前記嵌合状態をロックしており、
前記嵌合状態において前記操作部材が前記操作移動範囲の前記前端位置から所定距離だけ後方に位置し且つ前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記嵌合状態のロックが解除されている
コネクタ。 - 請求項1記載のコネクタであって、
前記操作部材が前記操作移動範囲の前記後端位置に位置したとき、前記可動部材は、前記移動範囲の前記後端位置に位置する
コネクタ。 - 請求項1又は請求項2記載のコネクタであって、
前記主部材は、前進操作規制部と、後退操作規制部とを備えており、
前記前進操作規制部は、前記操作部材の前方への移動を規制して、前記操作移動範囲の前記前端位置を規定しており、
前記後退操作規制部は、前記操作部材の後方への移動を規制して、前記操作移動範囲の前記後端位置を規定している
コネクタ。 - 請求項1乃至請求項3のいずれかに記載のコネクタであって、
前記主部材は、前進規制部を備えており、
前記前進規制部は、前記可動部材の前方への移動を規制して、前記移動範囲の前記前端位置を規定している
コネクタ。 - 請求項1乃至請求項4のいずれかに記載のコネクタであって、
前記操作部材は、前記可動部材に対して前記所定距離だけ相対的に移動可能であり、
前記操作移動範囲における前記前端位置と前記後端位置との間の前記操作部材の移動距離は、前記移動範囲における前記前端位置と前記後端位置との間の前記可動部材の移動距離+前記所定距離である
コネクタ。 - 請求項1乃至請求項5のいずれかに記載のコネクタであって、
前記ロック部は、前記前後方向と交差する方向に延びるロック爪である
コネクタ。 - 請求項1乃至請求項6のいずれかに記載のコネクタであって、
前記可動部材の前記支持部には、被操作部が設けられており、
前記操作部材には、操作突部が設けられており、
前記操作突部は、前記前後方向と直交する横方向の外側に突出しており、
前記嵌合状態において前記操作部材が前記操作移動範囲の前記前端位置から前記所定距離だけ後方に位置し且つ前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記被操作部は、前記横方向において前記操作突部の外側に位置し、前記ロック部は、前記横方向において前記相手側ロック部の外側に移動して前記嵌合状態のロックを解除している
コネクタ。 - 請求項7記載のコネクタであって、
前記可動部材は、ロック部材を備えており、
前記ロック部材は、曲げを有する一枚板であり、
前記支持部及び前記ロック部は、前記ロック部材の一部であり、
前記被操作部は、前記ロック部材に形成された湾曲部である
コネクタ。 - 請求項7又は請求項8記載のコネクタであって、
前記主部材には、維持部が設けられており、
前記操作部材が前記操作移動範囲の前記前端位置から前記所定距離を所定付加距離だけ超えて後方に位置し且つ前記可動部材が前記移動範囲の前記前端位置から前記所定付加距離だけ後方に位置しているとき、前記被操作部は、前記横方向において前記維持部の外側に位置し、前記ロック部の前記横方向の外側に移動した状態が維持されている
コネクタ。 - 請求項9記載のコネクタであって、
前記維持部には、仮保持部が設けられており、
前記仮保持部は、前記操作部材の前記操作突部を越えて前記横方向の外側に位置しており、
前記操作部材が前記操作移動範囲の前記後端位置に位置しているとき、前記被操作部は、前記横方向において前記仮保持部の外側に位置している
コネクタ。 - 請求項9記載のコネクタであって、
前記維持部には、仮保持部が設けられており、
前記仮保持部は、前記操作部材の前記操作突部を越えて前記横方向の外側に突出しており、
前記操作部材が前記操作移動範囲の前記後端位置に位置しているとき、前記仮保持部は、前記被操作部の前方を部分的に塞いでいる
コネクタ。 - 請求項9乃至請求項11のいずれかに記載のコネクタであって、
前記維持部は、その前端部を除き、前記操作部材の前記操作突部を越えて前記横方向の外側に位置している
コネクタ。 - 請求項7乃至請求項12のいずれかに記載のコネクタであって、
前記可動部材は、前記ロック部を2つ備えており、
前記コネクタ本体の前記嵌合部は、前記横方向において、2つの前記ロック部の間に位置している
コネクタ。 - 請求項1乃至請求項13のいずれかに記載のコネクタであって、
前記可動部材は、カバーを備えており、
前記嵌合状態のロックが解除されたとき、前記ロック部は、前記カバー内に受容される
コネクタ。 - 請求項1乃至請求項14のいずれかに記載のコネクタであって、
前記可動部材は、前進力受部と、後退力受部とを備えており、
前記操作部材は、前進力付加部と、後退力付加部とを備えており、
前記前後方向と直交する直交平面における前記前進力付加部の位置は、前記直交平面における前記前進力受部の位置と重なっており、
前記操作部材が前記操作移動範囲の前記後端位置に位置し、且つ、前記可動部材が前記移動範囲の前記後端位置に位置しているとき、前記前進力付加部は、前記前進力受部から後方に離れて前記前後方向において前記前進力受部と対向しており、
前記操作部材を前記操作移動範囲の前記後端位置から前方に移動すると、前記前進力付加部は、前記前進力受部に前方に向かう力を付加し、
前記直交平面における前記後退力付加部の位置は、前記直交平面における前記後退力受部の位置と重なっており、
前記操作部材が前記操作移動範囲の前記前端位置に位置し、且つ、前記可動部材が前記移動範囲の前記前端位置に位置しているとき、前記後退力付加部は、前記後退力受部から前方に離れて前記前後方向において前記後退力受部と対向しており、
前記操作部材を前記操作移動範囲の前記前端位置から後方に移動すると、前記後退力付加部は、前記後退力受部に後方に向かう力を付加する
コネクタ。 - 請求項1乃至請求項15のいずれかに記載のコネクタであって、
前記操作部材は、前記主部材の内部に少なくとも部分的に収容されている
コネクタ。 - 請求項16記載のコネクタであって、
前記可動部材は、前記主部材の内部に少なくとも部分的に収容されており、
前記操作部材は、前記可動部材の内部に少なくとも部分的に収容されている
コネクタ。 - 請求項1乃至請求項15のいずれかに記載のコネクタであって、
前記主部材は、前記操作部材の内部に少なくとも部分的に収容されている
コネクタ。 - 請求項18記載のコネクタであって、
前記可動部材は、前記操作部材の内部に少なくとも部分的に収容されており、
前記主部材は、前記可動部材の内部に少なくとも部分的に収容されている
コネクタ。 - 請求項1乃至請求項19のいずれかに記載のコネクタと、前記相手側コネクタとを備えたコネクタ組立体であって、
前記相手側コネクタは、前記相手側嵌合部と、前記相手側ロック部とを備えている
コネクタ組立体。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015223146A JP6570431B2 (ja) | 2015-11-13 | 2015-11-13 | コネクタ及びコネクタ組立体 |
| US15/262,322 US9666987B1 (en) | 2015-11-13 | 2016-09-12 | Connector and connector assembly |
| CN201610819580.6A CN106711696B (zh) | 2015-11-13 | 2016-09-13 | 连接器及连接器组件 |
| TW105129939A TWI635673B (zh) | 2015-11-13 | 2016-09-14 | 連接器及連接器組合體 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015223146A JP6570431B2 (ja) | 2015-11-13 | 2015-11-13 | コネクタ及びコネクタ組立体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017091915A JP2017091915A (ja) | 2017-05-25 |
| JP2017091915A5 JP2017091915A5 (ja) | 2018-08-16 |
| JP6570431B2 true JP6570431B2 (ja) | 2019-09-04 |
Family
ID=58691461
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015223146A Active JP6570431B2 (ja) | 2015-11-13 | 2015-11-13 | コネクタ及びコネクタ組立体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9666987B1 (ja) |
| JP (1) | JP6570431B2 (ja) |
| CN (1) | CN106711696B (ja) |
| TW (1) | TWI635673B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9843148B2 (en) * | 2013-07-19 | 2017-12-12 | Foxconn Interconnect Technology Limited | Flippable electrical connector |
| WO2016103363A1 (ja) * | 2014-12-24 | 2016-06-30 | トリニティ株式会社 | 携帯型電子機器におけるコネクター類の接続装置 |
| JP7144305B2 (ja) | 2018-12-14 | 2022-09-29 | 日本航空電子工業株式会社 | コネクタ組立体 |
| JP7330845B2 (ja) * | 2019-10-11 | 2023-08-22 | ヒロセ電機株式会社 | ロック機構付きコネクタ及びコネクタ装置 |
| CN211150950U (zh) * | 2020-01-03 | 2020-07-31 | 康普技术有限责任公司 | 电连接器组件 |
| WO2023119784A1 (ja) * | 2021-12-24 | 2023-06-29 | 株式会社ソニー・インタラクティブエンタテインメント | ケーブルに装着するためのアタッチメント装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5437960Y2 (ja) * | 1975-06-24 | 1979-11-13 | ||
| JPH097690A (ja) * | 1995-06-20 | 1997-01-10 | Sharp Corp | コネクタのロック構造 |
| JP3074453B2 (ja) * | 1995-06-27 | 2000-08-07 | 日本航空電子工業株式会社 | コネクタ装置 |
| JPH0963694A (ja) | 1995-08-21 | 1997-03-07 | Honda Tsushin Kogyo Kk | ロック機構を有するコネクタ |
| JP3451393B2 (ja) | 1998-01-30 | 2003-09-29 | 日本航空電子工業株式会社 | プラグコネクタ及びソケットコネクタ |
| DE19818677C2 (de) * | 1998-04-27 | 2000-07-06 | Amphenol Tuchel Elect | Zweiteiliger elektrischer Steckverbinder |
| JP2003297482A (ja) | 2002-02-01 | 2003-10-17 | Japan Aviation Electronics Industry Ltd | プルタブを用いたロック解除機構及びコネクタ |
| JP3788959B2 (ja) | 2002-08-05 | 2006-06-21 | 日本航空電子工業株式会社 | コネクタの筐体への取り付け構造及びコネクタ装置 |
| EP1575134A1 (en) | 2004-03-12 | 2005-09-14 | Thomson Multimedia Broadband Belgium | Securing device for electrical connectors and application thereof |
| US7309250B2 (en) * | 2004-12-16 | 2007-12-18 | Molex Incorporated | Plug connector ejector mechanism with integrated return action |
| JP2009543296A (ja) * | 2006-06-30 | 2009-12-03 | モレックス インコーポレイテド | 低背型ラッチコネクタ及びラッチを外すためのプルタブ |
| US7198522B1 (en) * | 2006-10-24 | 2007-04-03 | Cheng Uei Precision Industry Co., Ltd. | Plug connector |
| JP4917448B2 (ja) * | 2007-02-02 | 2012-04-18 | 日本圧着端子製造株式会社 | 電気コネクタ |
| TWM318829U (en) * | 2007-02-14 | 2007-09-11 | Yanglee Su Lan | Improved structure of micro serial-port electric connector |
| JP2009004228A (ja) * | 2007-06-21 | 2009-01-08 | Japan Aviation Electronics Industry Ltd | コネクタ |
| JP2009170391A (ja) | 2008-01-18 | 2009-07-30 | Lintec 21:Kk | ロック機構付きusbコネクタ用プラグ |
| WO2009093078A2 (en) * | 2008-01-25 | 2009-07-30 | Alexander Richard Drewnicki | Electrical connectors |
| US7628638B2 (en) * | 2008-04-01 | 2009-12-08 | Hon Hai Precision Ind. Co., Ltd. | Shielded electrical connector with latch means |
| EP2745356A4 (en) * | 2011-08-16 | 2015-04-08 | HARTING Electronics GmbH | LOCKING APPARATUS FOR ELECTRIC PLUG TYPE CONNECTORS |
| CN103138115B (zh) * | 2011-11-22 | 2015-07-08 | 富士康(昆山)电脑接插件有限公司 | 线缆连接器组件 |
| JP6133107B2 (ja) * | 2013-04-08 | 2017-05-24 | 日本航空電子工業株式会社 | プラグコネクタ |
| US9105999B2 (en) * | 2013-07-15 | 2015-08-11 | Tigerex Enterprise Co., Ltd. | Lock device for electronic apparatus |
| US9350126B2 (en) * | 2013-07-19 | 2016-05-24 | Foxconn Interconnect Technology Limited | Electrical connector having a receptacle with a shielding plate and a mating plug with metallic side arms |
-
2015
- 2015-11-13 JP JP2015223146A patent/JP6570431B2/ja active Active
-
2016
- 2016-09-12 US US15/262,322 patent/US9666987B1/en active Active
- 2016-09-13 CN CN201610819580.6A patent/CN106711696B/zh active Active
- 2016-09-14 TW TW105129939A patent/TWI635673B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| TWI635673B (zh) | 2018-09-11 |
| JP2017091915A (ja) | 2017-05-25 |
| US20170141514A1 (en) | 2017-05-18 |
| US9666987B1 (en) | 2017-05-30 |
| TW201717502A (zh) | 2017-05-16 |
| CN106711696B (zh) | 2019-01-11 |
| CN106711696A (zh) | 2017-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6570431B2 (ja) | コネクタ及びコネクタ組立体 | |
| US20080013148A1 (en) | Optical connection component which has a shutter member and which can be reduced in size | |
| JP6249998B2 (ja) | コネクタ | |
| JP2016149212A (ja) | ケーブルコネクタを有するコネクタ装置 | |
| JP2015169721A (ja) | 光トランシーバ | |
| JP6270144B2 (ja) | 調心機能付きコネクタ | |
| JP2017130422A (ja) | ケーブルコネクタと実装コネクタを有するコネクタ装置、及び、これに用いるコネクタ | |
| JP5223810B2 (ja) | コネクタの取付構造 | |
| JP5015812B2 (ja) | コネクタ用カバー | |
| JP5690510B2 (ja) | 電子部品 | |
| JP2008128460A (ja) | ロック構造 | |
| US11048049B2 (en) | Fiber optic connector | |
| JP2009037768A (ja) | 可動ガイド部材付きコネクタ | |
| JP2014059986A (ja) | コネクタ | |
| JP2012054206A (ja) | コネクタ | |
| JP6635588B2 (ja) | コネクタ | |
| JP5050860B2 (ja) | コネクタの取付構造 | |
| JP7068252B2 (ja) | 電気接続箱ユニット | |
| JP7098454B2 (ja) | コネクタ保持具及びこれを備えた電子機器 | |
| JP2013113878A (ja) | 光コネクタ用アダプタ | |
| JP3818373B2 (ja) | 遮蔽機構を備えた光コネクタ及び遮蔽部材 | |
| JP6390019B2 (ja) | 防水プラグ及びレセプタクル | |
| JP2019175728A (ja) | コネクタ | |
| WO2012002385A1 (ja) | 電子部品 | |
| JP6611307B2 (ja) | コネクタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180705 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180705 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190731 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190806 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6570431 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |