JP6564501B2 - アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 - Google Patents
アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 Download PDFInfo
- Publication number
- JP6564501B2 JP6564501B2 JP2018121557A JP2018121557A JP6564501B2 JP 6564501 B2 JP6564501 B2 JP 6564501B2 JP 2018121557 A JP2018121557 A JP 2018121557A JP 2018121557 A JP2018121557 A JP 2018121557A JP 6564501 B2 JP6564501 B2 JP 6564501B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- articulation
- links
- articulating probe
- twist
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000523 sample Substances 0.000 title claims description 116
- 238000000034 method Methods 0.000 title description 41
- 230000015572 biosynthetic process Effects 0.000 title 1
- 239000000463 material Substances 0.000 claims description 8
- 239000007787 solid Substances 0.000 claims description 2
- 230000007246 mechanism Effects 0.000 description 47
- 230000003993 interaction Effects 0.000 description 13
- 238000007373 indentation Methods 0.000 description 6
- 238000007689 inspection Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 210000001519 tissue Anatomy 0.000 description 5
- 230000009471 action Effects 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000008439 repair process Effects 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 2
- 239000002920 hazardous waste Substances 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 241000193738 Bacillus anthracis Species 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 241000270295 Serpentes Species 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- WYTGDNHDOZPMIW-RCBQFDQVSA-N alstonine Natural products C1=CC2=C3C=CC=CC3=NC2=C2N1C[C@H]1[C@H](C)OC=C(C(=O)OC)[C@H]1C2 WYTGDNHDOZPMIW-RCBQFDQVSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 229940065181 bacillus anthracis Drugs 0.000 description 1
- 239000012472 biological sample Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000012669 compression test Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 210000003200 peritoneal cavity Anatomy 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/06—Arms flexible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
- B25J9/065—Snake robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0055—Constructional details of insertion parts, e.g. vertebral elements
- A61B1/0056—Constructional details of insertion parts, e.g. vertebral elements the insertion parts being asymmetric, e.g. for unilateral bending mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/008—Articulations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Rehabilitation Therapy (AREA)
- Surgical Instruments (AREA)
- Manipulator (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Endoscopes (AREA)
Description
本願は、2011年9月13日付米国暫定特許出願第61/534032号の利益を享受する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2011年12月21日付米国暫定特許出願第61/578582号の利益を享受する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2012年6月7日付米国暫定特許出願第61/656600号の利益を享受する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2012年8月9日付米国暫定特許出願第61/681340号の利益を享受する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2012年6月1日付国際特許出願第PCT/US2012/040414号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2011年6月2日付米国暫定特許出願第61/492578号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2012年4月5日付国際特許出願第PCT/US2012/032279号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2011年4月6日付米国暫定特許出願第61/472344号の利益に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2011年11月10日付国際特許出願第PCT/US2011/060214号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2010年11月11日付米国暫定特許出願第61/412733号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2011年10月21日付国際特許出願第PCT/US2011/057282号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2010年10月22日付米国暫定特許出願第61/406032号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2011年7月21日付国際特許出願第PCT/US2011/044811号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2010年7月28日付米国暫定特許出願第61/368257号に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本願は、2006年12月20日付米国特許出願第11/630279号ひいては特許文献1に関連する出願である(この参照を以てその内容を本願に繰り入れる)。
本発明はロボット工学、特に三次元的で可撓且つステアラブルなロボット装置並びにその形成方法及び制御方法に関する。
侵襲性の低い医療技術及び手順が普及するにつれ、外科医その他の医療従事者がスネーク状ロボットシステムを使用することが多くなった。このシステムは高アーティキュレーテッドマルチリンクプローブ(関節性の高い多リンク型のプローブ)を有するシステムであり、それ以外の手段ではアクセス困難な人体内組織構成部分にもアクセスすることができる。こうしたロボットシステムを使用することで、従来は切開手術が必要であった場面で医療従事者等が非侵襲的手順を使用することが可能になる。
上述したタイプのロボットシステムにはワーキングチャネルと呼ばれる複数本のデバイスチャネルが設けられる。これは、手術中に手術ツールや検査ツールを導入、案内するために使用される。従来のアーティキュレーティングプローブ(関節付きプローブ)は一般に複数個のステアラブルリンクで構成されており、それらリンク間でツイスト(ねじれ)が生じやすかった。そのことが、アーティキュレーティングプローブの性能上の問題につながっていた。
本発明はアーティキュレーティングロボットシステム、ロボットシステムユーザインタフェース、ロボットシステム制御用ヒューマンインタフェースデバイス、ロボットシステム制御方法等として実施可能である。
本発明の一実施形態に係るアーティキュレーティングプローブは、第1長軸、第1アーティキュレーション面(関節面)及び第1モーションリミッティング要素(運動制限要素)を有する第1リンクと、第2長軸、第2アーティキュレーション面及び第2モーションリミッティング要素を有する第2リンクと、第1リンクに対する第2リンクの二自由度アーティキュレーション(関節運動)が可能になるよう、第1アーティキュレーション面及び第2アーティキュレーション面によって形成及び配置されているアーティキュレーションジョイントと、第1リンクの第1長軸に対する第2リンクの第2長軸周りでの回動が抑制されるよう、第1モーションリミッティング要素及び第2モーションリミッティング要素によって形成及び配置されているモーションレジスティングアセンブリ(運動制約アセンブリ)と、を有する第1機構を備える。
ある種の実施形態においては、第1アーティキュレーション面が凸面、第2アーティキュレーション面が凹面である。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面である。
ある種の実施形態においては、第2アーティキュレーション面が半球状の凹面である。
ある種の実施形態においては、第1モーションリミッティング要素がピン、第2モーションリミッティング要素がスロットを有し、第1リンクのピンが第2リンクのスロットに係合する。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面であり、ピンがその凸面の赤道面から延びるように配置される。
ある種の実施形態においては、第1モーションリミッティング要素が第1及び第2ピン、第2モーションリミッティング要素がそれに対応する第1及び第2スロットを有し、第1リンクに対する第2リンクのアーティキュレーション運動の範囲全体に亘り、第1及び第2ピンのうち少なくとも一方が、対応する第1及び第2スロットのうち少なくとも一方と、少なくとも部分的に係合する。
ある種の実施形態においては、第1リンクに対する第2リンクのアーティキュレーション角が0であるときに、第1及び第2ピン双方が、第1及び第2スロットのうち対応するものと部分的に係合する。
ある種の実施形態においては、第1及び第2ピンが、第1アーティキュレーション面に沿い第1長軸周りで180°の角度間隔を呈する。
ある種の実施形態においては、第1及び第2スロットが、第2アーティキュレーション面に沿い第2長軸周りで180°の角度間隔を呈する。
ある種の実施形態においては、第1モーションリミッティング要素が1本のピン、第2モーションリミッティング要素が1個のスロットを有し、第1リンクに対する第2リンクのアーティキュレーション運動の範囲全体に亘り、ピンがスロットと少なくとも部分的に係合する。
ある種の実施形態においては、ピンが第1アーティキュレーション面上、スロットが第2アーティキュレーション面上に位置する。
ある種の実施形態においては、スロットが第1アーティキュレーション面上、ピンが第2アーティキュレーション面上に位置する。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面であり、ピンが第1アーティキュレーション面のうち赤道・極間の部分に位置し、スロットが第2アーティキュレーション面上に位置する。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面であり、スロットがその半球状の第1アーティキュレーション面のうち赤道・極間の部分に位置し、ピンが第2アーティキュレーション面上に位置する。
ある種の実施形態においては、第1モーションリミッティング要素が単一のスロット、第2モーションリミッティング要素が単一のピンを有し、第1リンクに対する第2リンクのアーティキュレーション運動の範囲全体に亘り、ピンがスロットと少なくとも部分的に係合する。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面であり、スロットが、第1リンクの半球状の第1アーティキュレーション面上に位置すると共にその第1アーティキュレーション面の赤道から極へと延び、ピンが第2リンクの第2アーティキュレーション面下に位置する。
ある種の実施形態においては、第1リンクに対する第2リンクのアーティキュレーション角が0であるときに、第2リンク上のピンが、第1リンクに備わる第1アーティキュレーション面の赤道に揃う位置を占める。
ある種の実施形態においては、第2リンクが、更に、ピンに対し120°ずれた角度位置にある単一のスロットを有する第3モーションリミッティング要素を備え、その第3モーションリミッティング要素により形成される第2モーションリミッティングアセンブリが、対応するピンを有する第3リンクが第2リンクに対し第2長軸周りで呈する回動に抗するよう構成及び配置される。
ある種の実施形態においては、第1モーションリミッティング要素が少なくとも1個のリブ、第2モーションリミッティング要素が少なくとも1個の窪みを有し、第1リンクに対する第2リンクのアーティキュレーション運動の範囲全体に亘り、少なくとも1個のリブが少なくとも1個の窪みと少なくとも部分的に係合する。
ある種の実施形態においては、第1モーションリミッティング要素が複数個のリブ、第2モーションリミッティング要素がそれに対応する複数個の窪みを有し、第1リンクに対する第2リンクのアーティキュレーション運動の範囲全体に亘り、複数個のリブのうち少なくとも1個が、複数個の窪みのうち対応する少なくとも1個と、少なくとも部分的に係合する。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面であり、複数個のリブが、第1アーティキュレーション面の赤道部に沿い第1長軸周りで一定角度間隔で以て間隔配置される。
ある種の実施形態においては、リブの個数が2個であり、第1リンクの第1長軸を中心に180°の間隔で配置される。
ある種の実施形態においては、窪みの個数が2個であり、第2長軸を中心に180°の間隔で設けられる。
ある種の実施形態においては、リブの個数が3個であり、第1リンクの第1長軸を中心に120°の間隔で配置される。
ある種の実施形態においては、窪みの個数が3個であり、第2長軸を中心に120°の間隔で設けられる。
ある種の実施形態においては、リブの個数が4個であり、第1リンクの第1長軸を中心に90°の間隔で配置される。
ある種の実施形態においては、窪みの個数が4個であり、第2長軸を中心に90°の間隔で設けられる。
ある種の実施形態においては、リブの個数が5個であり、第1リンクの第1長軸を中心に72°の間隔で配置される。
ある種の実施形態においては、窪みの個数が5個であり、第2長軸を中心に72°の間隔で設けられる。
ある種の実施形態においては、リブの個数が6個であり、第1リンクの第1長軸を中心に60°の間隔で配置される。
ある種の実施形態においては、窪みの個数が6個であり、第2長軸を中心に60°の間隔で設けられる。
ある種の実施形態においては、リブの個数が7個であり、第1リンクの第1長軸を中心に360°/7の間隔で配置される。
ある種の実施形態においては、窪みの個数が7個であり、第2長軸を中心に360°/7の間隔で設けられる。
ある種の実施形態においては、リブの個数が8個であり、第1リンクの第1長軸を中心に45°の間隔で配置される。
ある種の実施形態においては、窪みの個数が8個であり、第2長軸を中心に45°の間隔で設けられる。
ある種の実施形態においては、第1リンクの外面のうち隣り合うリブ間の部分が平坦である。
ある種の実施形態においては、第2リンクの内面のうち隣り合う窪み間の部分が平坦である。
ある種の実施形態においては、第2リンクの内面のうち隣り合う窪み間の部分に湾曲がある。
ある種の実施形態においては、第1アーティキュレーション面が凸面、第2アーティキュレーション面が凹面である。
ある種の実施形態においては、凸状の第1アーティキュレーション面が半楕円体面である。
ある種の実施形態においては、凹状の第2アーティキュレーション面が半楕円体面である。
ある種の実施形態においては、第1リンクに備わる半楕円体状の第1アーティキュレーション面が第1モーションリミッティング要素を構成し、第2リンクに備わる半楕円体状の第2アーティキュレーション面が第2モーションリミッティング要素を構成する。
ある種の実施形態においては、第1及び第2リンクの最外面が、第1及び第2長軸のうち対応するものを中心とした円形の断面を呈する。
ある種の実施形態においては、第1アーティキュレーション面の半楕円体面が、マイナー軸と、マイナー軸に勝る長さのメジャー軸と、を有する。
ある種の実施形態においては、第2アーティキュレーション面の半楕円体面が、マイナー軸と、マイナー軸に勝る長さのメジャー軸と、を有する。
ある種の実施形態においては、第1アーティキュレーション面が凸状部分及び凹状部分を有し、第2アーティキュレーション面が第1アーティキュレーション面の凸状部分及び凹状部分に対応する凹状部分及び凸状部分を有する。
ある種の実施形態においては、第1リンクの第1アーティキュレーション面が第1モーションリミッティング要素を有し、第2リンクの第2アーティキュレーション面が第2モーションリミッティング要素を有する。
ある種の実施形態においては、第1及び第2リンクの最外面が、第1及び第2長軸のうち対応するものを中心とした円形の断面を呈する。
ある種の実施形態においては、第1及び第2リンクがアーティキュレーティングプローブのアウタリンクを構成する。
ある種の実施形態においては、第1及び第2リンクが本アーティキュレーティングプローブのインナリンクを構成する。
ある種の実施形態においては、第1モーションリミッティング要素が第1マグネット、第2モーションリミッティング要素が第2マグネットを有し、第1及び第2マグネットが、互いに磁気的に結合するよう第1及び第2リンクのうち対応するものの上に配置される。
ある種の実施形態においては、第1及び第2リンクが、それぞれ、下面及び上部ショルダを有するベースを備え、第1マグネットがベースの上部ショルダ上、第2マグネットがベースの下面上に位置し、第1及び第2マグネットが、互いに磁気的に結合するよう互いに整列される。
ある種の実施形態においては、第1及び第2マグネットが逆極性を呈する。
ある種の実施形態においては、第1マグネットが複数個、第2マグネットが複数個あり、それら複数個の第1及び第2マグネットが第1及び第2リンクのうち対応するものの長軸周りで一定角度間隔にて配置される。
ある種の実施形態においては、第1アーティキュレーション面が凸面、第2アーティキュレーション面が凹面である。
ある種の実施形態においては、第1アーティキュレーション面が半球状の凸面である。
ある種の実施形態においては、第2アーティキュレーション面が半球上の凹面である。
ある種の実施形態においては、第1マグネットが第1アーティキュレーション面上、第2マグネットが第2アーティキュレーション面上に位置し、第1及び第2マグネットが、互いに磁気的に結合するよう互いに整列される。
ある種の実施形態においては、第1及び第2マグネットが逆極性を呈する。
ある種の実施形態においては、第1マグネットのうち幾つかが第1極性、第1マグネットのうち残りの幾つかが第1極性とは逆の第2極性を呈する。
ある種の実施形態においては、全ての第1マグネットが同一の第1極性であり、全ての第2マグネットが同一の第2極性である。
ある種の実施形態においては、第1マグネットが複数個、第2マグネットが複数個あり、それら複数個の第1及び第2マグネットが第1及び第2リンクのうち対応するものの長軸周りで一定角度間隔にて配置される。
ある種の実施形態においては、それら複数個の第1及び第2マグネットが、第1及び第2アーティキュレーション面のうち対応するものに埋め込まれたディスクリートな磁気要素を含む。
ある種の実施形態においては、それら複数個の第1及び第2マグネットが、第1及び第2アーティキュレーション面のうち対応するものに埋め込まれた磁気ストリップを含む。
ある種の実施形態においては、第1アーティキュレーション面が凸面、第2アーティキュレーション面が凹面である。
ある種の実施形態においては、第1モーションリミッティング要素がピン、第2モーションリミッティング要素がスロットを有し、第1リンクのピンが第2リンクのスロットと係合し、第2リンクに対する第1リンクの回動に抗するよう第1リンクのピンが第2リンクのスロットの側壁と相互作用する。
ある種の実施形態においては、第1機構がアーティキュレーティングプローブのアウタリンク機構を構成する。
ある種の実施形態においては、第1機構がアーティキュレーティングプローブのインナリンク機構を構成する。
ある種の実施形態においては、モーションリミッティングアセンブリが、その長軸周りでの第2リンクの回動角を約1°に制限する。
ある種の実施形態においては、第1リンク及び第2リンクを通り、第1及び第2長軸のうち対応するものに対し平行な方向に延びる少なくとも1個のステアリングケーブル開口を有する。
ある種の実施形態においては、第1機構内のリンクに対応する少なくとも1本のステアリングケーブルを有し、そのステアリングケーブルを選択的に引っ張ることで第1及び第2アーティキュレーション面を物理的に接触した状態に保ち、選択的に緩めることで第1リンクに対する第2リンクの選択的な運動を可能にする。
ある種の実施形態においては、ステアリングケーブル開口が複数個、ステアリングケーブルが複数本ある。
ある種の実施形態においては、ステアリングケーブル開口及びステアリングケーブルが各2個ある。
ある種の実施形態においては、ステアリングケーブル開口及びステアリングケーブルが各3個ある。
ある種の実施形態においては、ステアリングケーブル開口及びステアリングケーブルが各4個ある。
ある種の実施形態においては、第1リンクが、更に、第1リンクの第1長軸に対し直交すると共に互いに直交する第1アーティキュレーション軸及び第2アーティキュレーション軸を有し、第2リンクが、更に、第2リンクの第2長軸に対し直交すると共に互いに直交する第1アーティキュレーション軸及び第2アーティキュレーション軸を有し、第1リンクに対する第2リンクの二自由度アーティキュレーションが、第1リンクの第1及び第2アーティキュレーション軸周りでの第2リンクの角度変化を含む。
本発明の他の実施形態に係るアーティキュレーティングプローブは、それぞれ第1長軸及び内面を有し、その内面に少なくとも1個の第1凹状部分があり、その第1凹状部分が第1長軸に沿って延びる複数個のアウタリンクと、それぞれ第2長軸及び外面を有し、その外面に少なくとも1個の第2凹状部分があり、その第2凹状部分が第2長軸に沿って延びる複数個のインナリンクと、アウタリンクに備わる複数個の第1凹状部分とインナリンクに備わる複数個の第2凹状部分との間にあり、インナリンク同士の二自由度アーティキュレーション及びアウタリンク同士の二自由度アーティキュレーションを可能とする共に、隣のインナリンクに対するインナリンクの回動及び隣のアウタリンクに対するアウタリンクの回動を制限するアンチツイスト部材と、を備える。
ある種の実施形態においては、アウタリンクの第1凹状部分及びインナリンクの第2凹状部分によりアーティキュレーティングプローブのワーキングチャネルが構成される。
ある種の実施形態においては、アンチツイスト部材が管状部材である。
ある種の実施形態においては、アンチツイスト部材が、複数個のインナリンク及び複数個のアウタリンクのうち手元部にあるリンクから先端部にあるリンクまで連続する
ある種の実施形態においては、アンチツイスト部材が、複数個のインナリンク及び複数個のアウタリンクのうち手元部にあるリンクから先端部にあるリンクまで分断される。
本発明の他の実施形態に係る外科手術実行方法は、本願記載のアーティキュレーションプローブを選定するステップと、そのアーティキュレーティングプローブを使用する少なくとも1個のツールが位置決めされるようアーティキュレーションプローブを操作するステップと、を有する。
本発明の他の実施形態に係る外科手術実行システムは、本願記載のアーティキュレーションプローブを備える。
本発明の他の実施形態に係るアーティキュレーションプローブ形成方法は、第1機構を準備するステップを有し、そのステップが、第1長軸、第1アーティキュレーション面及び第1モーションリミッティング要素を有する第1リンクを形成するステップと、第2長軸、第2アーティキュレーション面及び第2モーションリミッティング要素を有する第2リンクを形成するステップと、第1リンクに対する第2リンクの二自由度アーティキュレーションが可能になるよう、第1アーティキュレーション面及び第2アーティキュレーション面によって形成及び配置されているアーティキュレーションジョイントを形成するステップと、第1リンクの第1長軸に対する第2リンクの第2長軸周りでの回動が抑制されるよう、第1モーションリミッティング要素及び第2モーションリミッティング要素によって形成及び配置されているモーションレジスティングアセンブリを形成するステップと、を含む。
以下、上掲のものを含め本発明の目的、構成及び効果に関し明らかにすべく、別紙図面を参照しつつ本発明の諸実施形態について説明する。参照する図面では、同様の部材に対し同様の参照符号を付してある。本発明の仕組みについて説明すべく強調が施されているので、それら図面は原寸比に忠実であるとは限らない。
以下の説明では、種々の用語を、本発明の要旨を限定する目的ではなく本発明の諸実施形態を説明する目的で使用している。単数か複数かが明示されていないものは、文脈上自明でない限り、単数でも複数でもかまわない。更に、「備える」「有する」「含む」「呈する」等の語は、参照している特徴、物体、ステップ、動作、要素又は部品が存在していることを述べる趣旨で使用している。即ち、他の1個又は複数個の特徴、物体、ステップ、動作、要素、部品又はその組合せの存在乃至付加を排除しない趣旨で使用している。
また、「第1」「第2」「第3」等の語を種々の条件、要素、部品、領域、層乃至部分に前置して使用するが、これはそれらの語でそれら条件、要素、部品、領域、層乃至部分を実体的に限定する趣旨ではない。「第1」「第2」「第3」等の語を使用するのは、専ら、その条件等を他の条件等と区別するためである。従って、本願による開示に違背しない範囲内で、同じ条件、要素、部品、領域、層乃至部分のことを第1の条件等と称することもあれば第2の条件等と称することもある。
そして、ある要素が他の要素と「接触」「接続」「連結」等するとの表現は、前者が後者に直接「接触」等していても他の要素が介在していてもかまわない、との趣旨である。但し、「直接に」接触等する趣旨の語が併用されている場合は介在部材が存在しないものとする。要素間関係について述べるその他の語についても同様に解されたい(例.「間」対「直間」や「近接」対「隣接」)。また、第1の要素が第2の要素「上」を通るとの表現は、第2の要素の上を第1の要素が通っていても下を通っていてもかまわない、との趣旨である。第1の要素と第2の要素が直接に連結等していても、両要素間に他の要素が介在していても、両要素間に空間乃至間隙があってもかまわない。
まず、ステアラブルマルチリンク高アーティキュレーテッドプローブには様々な種類がある。例えば特許文献2(発明者:Robert Sturges;この参照を以て全内容を本願に繰り入れることとする)には、検査手順向けの可撓且つステアラブルな装置が記載されている。この装置には、1個又は複数個のスパインと、その長手方向に沿ってスパインを随時硬直化及び可撓化させる硬化手段と、が備わっている。そのスパインが可撓シースに収まっていて、そのシースがスパインに対し軸沿い摺動可能な構成であるので、硬直化させたスパインを同シースで硬直化状態に保つことや、可撓化させたスパインが撓みすぎないよう同シースで抑えることができる。また、装置の先端にはステアラブルなチップが、また手元端にはそのチップ用の制御手段が搭載されている。装置の先端には、スパインの硬化手段を随時オンオフさせるための機構がある。装置内導路はシース上に装着されている。
次に、米国特許出願第11/630279号(発明者:Howard Choset;この参照を以て全内容を本願に繰り入れることとする)には、インナコア及びアウタスリーブを前進及び後退させるフィーディング機構が記載されている。この機構には、ステアリングに使用される制御ケーブルに随時張力を加えることで、インナコア又はアウタスリーブの状態を硬直化状態・可撓可状態間で切り替える機能もある。
更に、特許文献3には、長尺な本体、随時ステアリングされる先端部及び自動制御される手元部を備えるステアラブル内視鏡が記載されている。内視鏡本体は患者体内に入れるべき部分であり、先端部はその患者の体内で採るべき経路を選び取るのに使用される。内視鏡本体を前進させるに当たっては、電子モーションコントローラの許で手元部を動作させ、先端部に所要曲線をなぞらせる。次の所要経路は先端部が選び取り、内視鏡本体はそれに沿って前進させる。内視鏡本体が更に前進すると内視鏡本体に沿い手元部寄りで経路が曲がり、内視鏡本体を手元方向に後退させると内視鏡本体に沿い先端部寄りで経路が曲がる。その結果、内視鏡本体が経路沿いに蛇状運動を起こし、体内組織内、体内組織周辺及び体内組織間に延びる所要経路が曲がりくねることとなる。
図10A〜図10Cに、本発明の一実施形態に係る高アーティキュレーテッドプローブ装置を模式的に示す。図示した実施形態に係る高アーティキュレーテッドロボットプローブ10は、基本的には同心な2個の機構、即ちアウタ機構及びインナ機構で構成されており、アウタ機構もインナ機構も図示の通りステアラブルな機構とされている。また、図10A〜図10Cの間にはプローブ10の動かし方に違いがある。まず、図10Aにおけるインナ機構即ち第1機構はインナコア乃至インナコア機構12、アウタ機構即ち第2機構はアウタスリーブ乃至アウタスリーブ機構14である。どちらの機構も硬直化(リジッド)状態及び可撓化(リンプ)状態を採りうる。硬直化モード乃至状態の機構は可撓性(フレキシビリティ)が低く、その形状を容易には変化させることができない。可撓化モード乃至状態の機構は可撓性が高く、周囲の形状をなぞらせること即ち変形させることができる。なお、ここでいう「可撓化」とは、重力の作用や周囲物体の形状に応じその構造の経路が受動的に決まる状態のことではない。寧ろ、装置使用者が望んでいる位置及び経路を辿らせることが可能な状態のことを指している。即ち、グニャグニャと受動的に動くのではなく関節のように制御されたかたちで動く状態のことを指している。
動かすに際しては、まず一方の機構を可撓化状態、他方の機構を硬直化状態にする。説明のため、図10Aのステップ1では、インナコア12を可撓化状態、アウタスリーブ14を硬直化状態としている。この状態で、後述の要領に従いフィーディング機構16でインナコア12を押し、同図のステップ2に示す如くそのヘッド即ち先端部をステアリングする。更に、インナコア12を硬直化状態、アウタスリーブ14を可撓化状態にしてアウタスリーブ14を前方に押し、同図のステップ3に示す如くアウタスリーブ14をインナコア12に倣いまた追いつくように前進させる。その次は、インナコア12を可撓化状態、アウタスリーブ14を硬直化状態として同様のプロセスを反復する。これに代え、アウタスリーブ14をもステアリングするようにしてもよい。図10Bに示したのがそうした装置動作例である。図10Bでは、各機構が他の機構に追いつきつつ1リンクずつ進んでいる。また、例えば、インナコア12ではなくアウタスリーブ14をステアリングするようにしてもよい。図10Cに示したのがそうした装置動作例である。
医療分野では、プローブ10が所要位置に到達すると、使用者(通常は外科医)が1個又は複数個のチャネル内にツールを挿入して種々の診断乃至治療手順を実行する。そのチャネルとしては、アウタスリーブ14内、インナコア12上又はアウタスリーブ14・インナコア12間に形成されたチャネルが使用される。こうしたチャネルはワーキングチャネルと呼ばれており、例えばアウタリンクシステムに形成された第1窪みとインナリンクシステムに形成された第2窪みとの間に延設される。アウタリンク及びインナリンクの形態については図1A〜図9を参照して詳述する。
臨床手順例えば手術以外にも、こうしたプローブ10の用途は数多くある。例えば、エンジンの検査、修理及び改造、タンクの検査及び修理、索敵及び監視の用途、爆弾の処理、潜水艦コンパートメント内や核兵器内のように狭い空間内での検査乃至修理、建物をはじめとする構造の検査、危険な廃棄物の処置、炭疽菌のような生物学的サンプルの採取、その組合せ等である。自明な通り、本発明に係る装置には様々な用途があり、いずれかの用途に限定されるものではない。
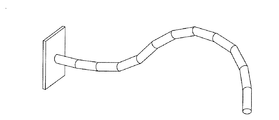
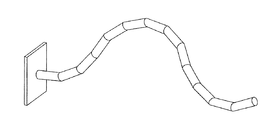
インナコア12やアウタスリーブ14は、ステアリング可能であると共に、個別的に硬直化及び可撓化させることができるので、プローブ10を三次元空間内の随所へと差し向けることができる。そのため、プローブ10に自分の従前形状を“覚え”させ、三次元空間例えば(人間)患者の体腔内空間にて随所に送り込むことができる。図11A及び図11Bに、プローブ10で実現しうる形状の例を示す。
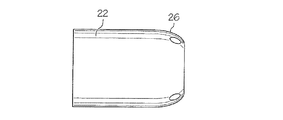
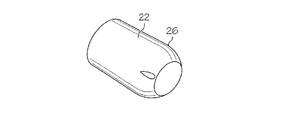
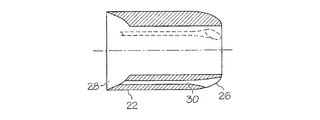
図12A〜図12D、図13A及び図13Bに例示するように、アウタスリーブ14及びインナコア12はいずれも同心円筒、即ちアウタリンク22及びインナリンク24で形成することができる。その他の形状のリンク、例えばドッグボーン状リンク(図示せず)や非同心的な形状のリンク例えばバックボーン状リンク等も使用可能である。また、本実施形態ではリンク22,24の端部が平坦ではなく、その一端26が突出面即ち凸状係合面、他端28が陥入面即ち凹状係合面となっている。ここでは凸状係合面と凹状係合面が半球面でその曲率半径がほぼ同一であるが、本願記載の通り本発明はこうした形状に限定されない。リンク22は、あるリンク22の凹状端28に隣のリンク22の凸状端26が嵌まる、といった端部間入れ子の要領で連鎖される。同様に、リンク24も端部間入れ子の要領で連鎖される。その結果、運動学的な観点からみて球状なジョイントが形成される。本実施形態では、各リンクを隣のリンクのヘッドに沿い回動させること即ちアーティキュレートすることが可能で、諸方向に亘り約10〜20°のアーティキュレーション幅を呈する球状ジョイントが機能している。その他の回動幅にすることも可能であるし、場合によってはそれによるメリットも生じる。更に、本実施形態では、リンク22に複数個のチャネル30乃至ケーブル開口が設けられている。この開口30には例えば複数本の制御ケーブルが通される。或いは、長尺ツール等の長尺装置が通される。
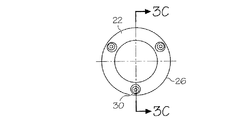
本実施形態では、アウタスリーブ14及びインナコア12双方のヘッド即ち先端部を、互いに120°離れた位置にある3本のケーブルでステアリングすることができる。図12A〜図12Dに示す小円筒状のチャネル30にはそれぞれケーブルが通る。アウタリンク22にはこのチャネル30が3個設けられている。図13A及び図13Bに示す例では孔34にケーブルが通る。通すケーブルが1本であるので、インナリンク24にはこの孔34が中心に1個設けられている。
なお、本実施形態ではケーブルとして可撓なフィラメント状構造例えば導電性又は非導電性のワイヤを想定しているが、これ以外の可撓化部分操作手段を用いることもできる。例えば、個別のリンク間に機械的リンク手段、例えば小型の水圧式乃至油圧式ピストンを配してもよい。そうした構成も本発明の技術的範囲内に属する。
リンクひいてはプローブ10は様々な素材で形成することができる。例えばプラスチック等のようにMRI(磁気共鳴イメージング)コンパチブルな素材である。アウタスリーブ14の直径は様々な値、例えば5mm超の値にすることができる。同様に、インナコア12の直径は様々な値、例えばアウタスリーブ14の直径より小さいが3mm超の値にすることができる。アウタリンクアセンブリを構成するアウタリンクの総数やインナリンクアセンブリを構成するインナリンクの総数は様々な値、例えば10個超とすることができる。
上述した通り、インナコア12及びアウタスリーブ14は、可撓なフィラメント状構造例えばケーブルを使用し、硬直化及び可撓化させることができる。本実施形態では、アウタスリーブ14を構成する一群のリンク22が3本のケーブルに沿い連なっている。それら3本のケーブルが120°間隔で配されているので、スリーブ14を任意方向にステアリングすることができる。プローブ10の曲率半径は、リンク22の長さ、組み合わさるリンク22の端部間の係合寸法等、様々な要因に依存する。ケーブルをアウタスリーブ14の後方に向け引っ張ると、リンク22同士が互いに近づくように引っ張られる。引っ張る力が強まると、隣り合うリンク22間の摩擦力が強まり、いずれはアウタスリーブ14全体が硬直化する(即ち硬直化モードに突入する)。引っ張る力が弱まるとアウタスリーブ14は可撓化状態になる。即ち、ケーブル及びそのテンショニングアセンブリ(例.モータ駆動プーリ)がロッキング装置を形成する。テンショニングアセンブリは、そのテンショニングアセンブリを制御する電子回路と共に、そのケーブルに作用する張力を制御する手段を形成する。アウタスリーブ14がインナコア12面前のあるリンク位置に位置決めされていて、インナコア12が硬直化状態になっていれば、アウタスリーブ14の先端部に位置するリンクの向きを、3本あるケーブルのうち1本又は複数本を引っ張ることで変えることができる。ケーブルの前進及び後退に加え、各ケーブルに作用する引っ張り力の強さもモニタ乃至制御することができる。3本のケーブルを同じ強さで引っ張ると、アウタスリーブ14はその形状を変えずに硬直化状態になる。
インナコア12も、アウタスリーブ14と同様、一群のリンクで構成されている。但し、アウタスリーブ14と違い、インナコア12にはステアリング能力を付与する必要がない。無論、ステアリング能力をオプションとしてインナコア12に付加することもできる。また、インナコア12を硬直化モード・可撓化モード間で変化させることができる。従って、インナコア12をステアリング可能とする必要がない場合は、図示例のように、インナコア12を構成するリンク群が連なるケーブルを1本にすればよい。それにより、プローブ10の直径を抑えることができる。
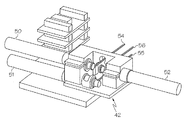
上述のように、プローブ10の制御にはフィーディング機構16が使用される。図14A及び図14Bにフィーディング機構16の一例を示す。この例では、機構16による前進及び後退を通じプローブ10が注目領域、例えば食道、腹膜腔、囲心腔等の患者体内空間内に挿抜される。機構16には可動なカートが2個備わっている。第1固定トレイ43内に装着されている第1カート42はアウタスリーブ14を前進及び後退させ、第2固定トレイ45内に装着されている第2カート44はインナコア12を前進及び後退させる。各カート42,44ひいてはインナコア12及びアウタスリーブ14は、それぞれ、対応するリニアアクチュエータ46,48によって個別に駆動される。リニアアクチュエータ46,48には、本件技術分野で習熟を積まれた方々(いわゆる当業者)にとり既知の通り、位置制御用にシャフトエンコーダ(図示せず)を設けることができる。これに代え又は加え、モータ電流をモニタすることによっても、ケーブルに働く張力の強さを調べ位置制御に利用することができる。ケーブル張力値は1個又は複数個のセンサ、例えばロードセルでモニタすることができる。ケーブル張力、カート位置、プローブの向き及び形状等のシステムパラメタに関する情報を得る手段としては、その他、相応の位置センサその他のセンサを使用することができる。用いうるセンサの例としては、光センサ、磁気センサ(例.ホール効果センサ)、力及び圧力センサ(例.加速度計、歪みゲージ及び機械スイッチ)、その組合せ等を挙げることができる。一種類又は複数種類のセンサを複数個所、例えばフィーディング機構16、インナコア12及びアウタスリーブ14に設けることもできる。
各カート42,44には、それぞれ、インナコア12及びアウタスリーブ14のケーブルを制御するのに必要なモータが1個又は複数個載っている。具体的には、図15及び図16に示すように、アウタスリーブ14のケーブル54,55,56に作用する張力を制御するのに必要なモータ50,51,52が第1カート42上に載っているし、図17に示すように、インナコア12のケーブル59に作用する張力を制御するのに必要なモータ58が第2カート44上に載っている。各モータ50,51,52,58には、既知の通り、位置制御用のシャフトエンコーダ(図示せず)が付設されている。インナコア12をステアリング可能な形態にするには、インナコア12に係るモータ(例.複数本のケーブルを引っ張るためのモータ)その他のケーブルテンショニング機構を複数個にする必要があろう。
図18に、一実施形態における制御システムの構成要素及びそれら要素間の情報流に関しブロック構成を示す。まず、フィーディング機構16はバス変換モジュール64を介し制御コンピュータ62に接続されている。フィーディング機構16からの出力データはモジュール64に入力され、そこで通信プロトコルが相応のプロトコル例えばUSBプロトコルに変換され、そしてコンピュータ62側のUSBポート66に入力される。制御ソフトウェア68への入力データには、例えばモータ電流データ、モータエンコーダデータ、フィーディング機構16内の個別ケーブルに係るケーブル張力データ等が含まれる。これに代え又は加え、フィーディング機構16、インナコア(例えば上掲の12)又はアウタスリーブ(例えば上掲の14)に設けた1個又は複数個のセンサからのデータを、制御ソフトウェア68への入力データに含ませてもよい。ジョイスティック70からジョイスティックデータ(位置データ)を受け取ることもできる。モニタ72上には、アウタスリーブ14やインナコア12の先端部に実装されているカメラからのビデオデータに基づき、ユーザに視覚的にフィードバックされるよう、プローブ10の先端部のありかが表示される。制御ソフトウェア68は、フィーディング機構16向けに、モータ電流制限コマンド及びモータ位置コマンドを出力する。
アーティキュレーティングプローブの動作に際しては、アウタスリーブリンクシステムやインナコアリンクシステムを構成するリンク間にツイストが発生することがある。例えば、プローブの動作に際し、隣り合うリンク間に固有量のツイストが発生しうる。リンクのツイストは、そのリンクシステム全体に亘り累積していく。従って、隣り合うリンク間での角度誤差は僅かでも、システムの先端部から手元部までのツイスト総量は大きくなりうる。システムを構成するリンクの個数が多いほど、ツイストの累積量も多くなる。こうしたツイストはアーティキュレーティングプローブの性能に悪影響を及ぼす。
ツイストは様々な原因、例えばステアリングケーブルの外径とステアリングケーブル開口の内径との差によって発生する。また、動作中又は動作前に、隣り合うリンク間にずれが発生することもある。リンク同士のツイストは、ステアリング入力・ステアリング出力間に不一致を発生させる。ユーザ座標系とロボット座標系の間にずれが発生することもある。この場合、使用者がある方向に回し始めたいときに、ロボットを別の方向に動かしツイストを補償する必要がある。加えて、リンク同士が互いにツイストしているときには、そのことが原因でステアリング範囲が制限される。ツイストが生じると隣り合うリンク同士が不本意にもロックされてしまうことがあるし、ツイストしたリンク間のギャップにステアリングケーブルが捉えられてしまうことがある。これは、翻ってケーブルのバインディングにつながる。それは、ステアリング力の増大にもつながるし、可撓化モードで動作している最中の張力緩和不足にもつながりうる。ツイストによる更なる問題としては、リンクシステムの内部チャネルに挿入された機器のバインディング、例えば内部ツールチャネルの詰まりや、システム内導電体の過剰な摩耗等がある。ツイストは、また、インナリンク・アウタリンク間の摩耗及び摩擦を増加させ、隣り合うリンクをバインディングさせるので、動作中に諸リンクを前進させることが難しくなる。そして、ツイストは、標的組織に対するプローブ端の位置ずれを発生させうる。
隣り合うリンク間のツイストは5°程のずれになりうる。リンクシステムを構成するリンクのうち先端部のものと手元部のものと間の累積的なツイストは45°ほどにもなりうる。本願に実施形態として記載したシステム及び方法によれば、第1リンクに対するその隣のリンク(第2リンク)のツイストを防ぎ又は量的に抑えつつ、ステアリング目的でリンク群をアーティキュレートさせることができる。
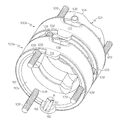
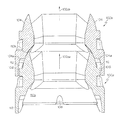
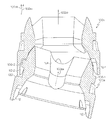
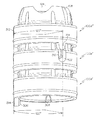
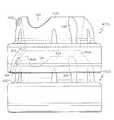
図1Aに、本発明の一実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2アウタリンクの側面を示す。図1Bに、図1Aに示した第1及び第2アウタリンクの下方斜視外観を示す。図1Cに、図1Aに示した第1及び第2アウタリンクの縦断面を示す。図1Dに、図1Aに示した第1及び第2アウタリンク、特に第1アウタリンクに対し第2アウタリンクがアーティキュレートしている状態の縦断面を示す。図1Eに、図1Aに示した第1及び第2アウタリンクのうち1個の側方斜視外観を示す。
図1Aに示すように、このアーティキュレーティングプローブの第1アウタリンク100a及び第2アウタリンク100b(総称して100)は、それぞれ、長軸102za,102zb、アーティキュレーションジョイント(図1Cの如くアーティキュレーション面104及び110から形成されるジョイント)及びモーションリミッティング要素106が備わるように構成されている。アウタリンク100は複数個あり、互いに積層され入れ子となっている。アウタリンク100は、互いにアーティキュレートできるよう且つ互いに分離しないよう、各リンク100に1個又は複数個設けられているステアリングケーブル開口108を通るステアリングケーブル109(図1B参照)によって連結されている。本実施形態ではステアリングケーブルが3本、それ用の開口108が3個あるが(図1B参照)、ステアリングケーブルやステアリングケーブル開口の個数を3個以外の個数にすることもできる。そのアーティキュレーティングプローブの用途次第である。
図1Cに示すように、アーティキュレーションジョイントは、第1アウタリンク100aに備わる凸状のアーティキュレーション面104aと、第2アウタリンク100bに備わる凹状のアーティキュレーション面110bとにより構成されている。これら凸面及び凹面は、ステアリングケーブル109による制御の許、第1アウタリンク100aに対する第2アウタリンク100bのアーティキュレーション範囲を通じ係合しあう。アーティキュレーティングプローブの先端部から手元部にかけて延びるステアリングケーブル109のうち1本又は複数本に任意時点で張力を作用させると、アセンブリを形成している諸リンクのアーティキュレーションジョイントがその位置に保持される。
図1A〜図1Cでは、第1アウタリンク100aの長軸102zaと第2アウタリンク100bの長軸102zbとが互いに整列しており、その交差角が0°となっている。このポジションは、いわば、第2アウタリンク100bが第1アウタリンク100aに対しアーティキュレートしていないポジションである。これに対し、図1Dでは、第2アウタリンク100bの長軸(第2長軸)102zbが、第1アウタリンク100aの長軸(第1長軸)102zaに対し、非0°角で交差している。このポジションは、いわば、第2アウタリンク100bが第1アウタリンク100aに対しアーティキュレートしているポジションである。
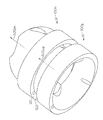
図2に、本発明の一実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わるアウタリンクの下方斜視外観を示す。図中の102xはアウタリンクの第1アーティキュレーション軸、102yは第2アーティキュレーション軸である。これらのアーティキュレーション軸102x,102yは、互いに直交していると共に、そのアウタリンクの長軸102zにも直交している。アーティキュレーション許容域全体に亘り、第1アウタリンク100aに隣り合う第2アウタリンク100bは、第1アウタリンク100aのアーティキュレーション軸102x,102yに対しアーティキュレート可能である。即ち、第1アーティキュレーション軸102x周りでは矢印103xで示す角度範囲に亘り、また第2アーティキュレーション軸102y周りでは矢印103yで示す角度範囲に亘りアーティキュレートされうる。従って、アーティキュレーションの自由度は二自由度となる。隣の第1アウタリンク100aに対する第2アウタリンク100bの回動、即ち矢印103zで示す方向に沿ったツイストは、本願記載の諸理由からみて望ましくない。本願記載の通り、本発明の諸実施形態では、アーティキュレーティングプローブアセンブリ内で隣り合っているアウタリンク又はインナリンク間の回動乃至ツイスト(隣の第1アウタリンクに対する第2アウタリンクのツイストや隣の第1インナリンクに対する第2インナリンクのツイスト)を制限、軽減乃至抑制するために諸形態のモーションレジスティングアセンブリを提供している。
翻って、図1Aに示すように、第1アウタリンク100a及び第2アウタリンク100bは、いずれも、モーションリミッティング要素たるピン106(斜視図である図1Eにも現れている)を有している。これは、隣のリンク上の対応するスロット112と連携しで一種のモーションレジスティングアセンブリ、即ち第1アウタリンク100aに対する第2アウタリンク100bの回動(ツイスト)を制限するアセンブリを形成する。具体的には、このモーションレジスティングアセンブリ(106,112)は、第1アウタリンク100aの長軸102zaに対し第2アウタリンク100bがその長軸102zb周りで呈する回動を制限する。
同時に、このモーションレジスティングアセンブリ(106,112)の動作により、第2アウタリンク100bに対する第1アウタリンク100aのツイストが制限される。従って、このモーションレジスティングアセンブリ(106,112)には、第1アウタリンク100a・第2アウタリンク100b相互のツイストを制限する働きがあるといえる。
本実施形態では、アウタリンク100に備わる凸状アーティキュレーション面104の下部から外方に向けピン106が延びている。この例では凸状アーティキュレーション面104が半球状であるので、ピン106の位置はその半球面の“赤道”上にある。本実施形態ではピン106の断面形状が円形であるので、アーティキュレーション中に、隣のリンクに備わるスロット112を枢動させることができる。無論、ピン106の断面形状を円形以外の形状にすることもできる。
本実施形態では、リンク100の下部から延びるピン用突出部即ちタブ114にスロット112が形成されている。スロット112の幅W(図1B参照)は、ピン106を収容しうるようピン106の幅に応じ設定されている。図示例は、ピン106をスロット長手方向に沿いスロット112内で自在に摺動させることが可能であると共に、ピン106の横方向の遊びがスロット112の側壁によって制限される構成である。スロット112の長さLは、隣り合うリンク100a,100b同士の所要アーティキュレーション範囲に亘りピン106を摺動させうるように設定されている。スロット112の上部は、対応するピン106の丸みに応じ丸められている。
本実施形態では、図1Cに示すように、リンク100毎に2本のピン106が設けられると共に、隣のリンク100のピン106と勘合するようリンク100毎に2個のスロット112が設けられている。無論、各リンクに設けるピン106やスロット112の個数を1個にすることや3個以上にすることも可能であり、それはその用途次第である。また、図1Cに示した例では、第1アウタリンク100aが第2アウタリンク100bに対し整列していて、その長軸102za,102zbが互いに重なり合っている。この状態即ち非アーティキュレーション状態では、第1アウタリンク100aに備わる2本のピン106が、隣の第2アウタリンク100bに備わる2個のスロット112に(少なくとも部分的に)係合する。このポジションでは、2本あるピン106がそれに対応するスロット112に係合しているため、第1アウタリンク100aの長軸102zaに対しその長軸102zb周りで第2アウタリンク100bが回動乃至ツイストすることが、制限乃至防止される。具体的には、第2アウタリンク100bに作用するツイストモーメントがどのような大きさであっても、第1アウタリンク100aのピン106を挟むよう配された第2アウタリンク100b側スロット112の側壁によって制限されるため、第2アウタリンク100bがその長軸102zb周りで回動することが妨げられる。同時に、ピン106及びスロット112の相互作用で第1アウタリンク100aに対する第2アウタリンク100bのアーティキュレーション、例えば第1アウタリンク100aのアーティキュレーション軸102x,102y(図2参照)を中心にした第2アウタリンク100bのアーティキュレーションが制限乃至阻止されることもない。第1アウタリンク100aに対する第2アウタリンク100bの自在アーティキュレーション性が保たれつつ、第1アウタリンク100aに対する第2アウタリンク100bの不要ツイストが制限乃至阻止されることとなる。
図1Dに示すように、第1アウタリンク100aに対し第2アウタリンク100bを更にアーティキュレートさせると、一方のピン106−1がそれに対応するスロット112−1から外れると共に、他方のピン106−2がそれに対応するスロット112−2内により深く入り込む。同様に、このポジション即ちアーティキュレートポジションでは、第2アウタリンク100bのスロット112−2に備わる側壁が第1アウタリンク100aの対応するピン106−2に作用するため、第1アウタリンク100aに対し第2アウタリンク100bがその長軸102zb周りでツイストすることがない。それでいて、第1アウタリンク100aに対する第2アウタリンク100bの自在アーティキュレーション性は保たれる。
図1A〜図1Eに示すように、リンク100a,100bはいずれも下部126及び上部128を有している。本実施形態では下部126に凹状アーティキュレーション面110、上部128に凸状アーティキュレーション面104があり、その協働でアーティキュレーションジョイントが形成されている。下部126の外面と上部128の外面とが差し向かう部位にはショルダ120が設けられている。第1アウタリンク100aのショルダ120と第2アウタリンク100bの下面121には、第1アウタリンク100aに対する第2アウタリンク100bのアーティキュレーションを制限する、という働きがある。具体的には、アーティキュレーションの角度が、第2アウタリンク100bの下面121が第1アウタリンク100aのショルダ120に物理的に当接する位置に応じた角度に制限される。
同じく図1A〜図1Eに示すように、本実施形態では、下部のショルダ120に窪み122が形成されている。窪み122の形状は、ピン用突出部即ちタブ114が収まるような形状である。このようにしてあるため、その周縁長が増さないようリンク100a,100bの外面輪郭を維持しつつ、タブ114のスロット112を対応するピン106に係合させることができる。本実施形態では、第1アウタリンク100aに対する第2アウタリンク100bのアーティキュレーションを制限しないような構成及び配置で、タブ114及び対応する窪み122を設けることも可能である。言い換えれば、大きくアーティキュレーションさせたときに、タブ114及び対応する窪み122の表面の間でクリアランスを保ちつつ、第1アウタリンク100aのショルダ120が隣のリンク100bの下面121へと当接方向に動く構成である。これに代え、隣り合うリンク100a,100bの下面121及びショルダ120間でクリアランスを保ちつつ、タブ114及び窪み122の間の相互作用域でアーティキュレーション制限機能が生じるように、タブ114及び対応する窪み122を構成してもよい。
同じく図1A〜図1Eに示すように、図示例のリンク100a,100bは、アーティキュレートする複数個のインナリンク及びアーティキュレートする複数個のアウタリンクからなるアーティキュレーティングプローブにて、そのアウタリンクとして使用される。本実施形態では、アウタリンクの内部とそれに対応するインナリンクの外部との接触域に、窪み124が設けられている。窪み124はアーティキュレーティングプローブのワーキングチャネルに対応しており、それを介し上述の如く諸機能要素をアーティキュレーティングプローブの手元部から先端部へと送り込むことができる。
図1A〜図1Eに示すように、本実施形態では、第1アウタリンク100aの凸状アーティキュレーション面104aを半球状凸面、第2アウタリンク100bの凹状アーティキュレーション面110を半球状凹面にすることができる。第1アウタリンク100aの凸状アーティキュレーション面104aの半径は、第2アウタリンク100bの凹状アーティキュレーション面110の半径と同一にすればよい。第1アウタリンク100aの凸状アーティキュレーション面104aの半径を、第2アウタリンク100bの凹状アーティキュレーション面110の半径より大きくしてもよい。第1アウタリンク100aの凸状アーティキュレーション面104aの半径を、第2アウタリンク100bの凹状アーティキュレーション面110の半径より小さくしてもよい。
図1A〜図1Eに示すように、本実施形態では、第1アウタリンク100aの凸状アーティキュレーション面104aを半球状凸面、第2アウタリンク100bの凹状アーティキュレーション面110を半錐状凹面にすることができる。この形状のよいところは、生じるアーティキュレーションジョイント内の接触部が円形になる点である。そのため、接触部面積が小さくてバインディングが生じにくいインタフェースが得られる。また、製造プロセスでの変動要素例えばテキスチャ、素材、摩擦等の変動の影響をインタフェースが被りにくいため、凸状及び凹状アーティキュレーション面の係合特性をより円滑に制御することができる。生じるインタフェースがリンク間公差変動に対し鈍感になるため製造コストを抑えることもできる。
例えば、凸状アーティキュレーション面が半球状であるなら、その球面直径の変動は、凸面・凹面間接触面積に影響を及ぼす。これは、ステアリング力の変動、隣接リンク間圧縮量の変動、並びにアーティキュレーション面間バインディングにつながりうる。また、凹状アーティキュレーション面が半錘状であるなら、製造乃至使用に伴うどういった凸面変動も、凸状アーティキュレーション面・凹状アーティキュレーション面間の接触角及び接触位置にさほど影響を及ぼさない。凸面サイズの変動はその凸面が半錘状凹面の内法にどれだけ入り込むかを左右するが、幾何学的形状がこうした形状であると、入り込みの大小によらず接触角は同一となる。
半錘状面の角度は、もたらされるアーティキュレーティングプローブのペイロードとステアリング性とのトレードオフを踏まえ設定すればよい。半錘状面の角度によって、半球状凸状アーティキュレーション面・半錘状凹状アーティキュレーション面間の接触点が、制御されるからである。一般に、接触点が低くその位置が錐の大径部寄りになるほど、インタフェースの強度、ひいてはアーティキュレーティングプローブの強度が高まる。接触点が高くその位置が錐の小径部寄りになるほど、アーティキュレーティングプローブのステアリング性が高まる。
本実施形態では、半錘状面の角度が約23°であり左右合計で46°となる。アウタリンク形状、素材強度及び素材摩擦特性を総合的に踏まえるなら、こうした角度にするのが望ましい。角度をある範囲内で変えてテストを行ってみたところ、23°の半錘状面であった場合に圧縮テストが最善となった。言い換えれば、半錘状凹面が半球状凸面に接触する位置での圧縮量が最小であると共に、硬直化状態でのロック能に係る摩擦量が摩擦/ステアリングテスト結果からみて最良となった。より狭い角例えば14°角では圧縮下でアウタリンク同士の張り付き乃至バインディングが生じ、より緩やかな角例えば約23°超の角では硬直化状態でのロック能が低下した。無論、形状、摩擦及び素材強度の組合せ次第では、23°未満又は超の半錘状面角が望ましくなる場合もある。
本実施形態では、アウタリンク100のシステムにて3本のステアリングケーブルが使用され、それらが互いに120°間隔で配されている。リンクのアーティキュレーション面を硬直化ポジションに保つにはこれらステアリングケーブルを選択的に引っ張ればよく、可撓化ポジションにてリンクの選択的な動きを可能にするにはこれらステアリングケーブルを選択的に緩めればよい。ステアリングケーブルの本数を他の本数、例えば2本、4本又はそれ以上にすることも可能であるし、ステアリングケーブルの配置間隔を一定角度にすることも非一定な角度にすることも可能である。
図3Aに、本発明の他の実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2アウタリンクの斜視外観を示す。
図3Aに示すように、本実施形態では、1個又は複数個のスロット312及びそれに対応する1本又は複数本(図では相対向する2本)のピン306によってモーションレジスティングアセンブリが構成されている。それらのうちスロット312は、リンク100c,100dに備わる凸状アーティキュレーション面304の外面上に位置している。ピン306は、隣のリンク100c,100dに備わる対応するスロット312と係合しうるような形態でタブ314上に配されている。
本実施形態では、リンク100c,100dに備わる凸状アーティキュレーション面304が半球状になっている。こうした構成では、隣接リンクのアーティキュレーション角が0であるとき即ち互いの長軸が揃っているときに、第1リンク100cに備わる半球状凸状アーティキュレーション面304の赤道に対しその隣の第2リンク100dに備わるピン306が整列するよう、当該第2リンク100dのピン306を配置することができる。スロット312は半球状凸状アーティキュレーション面304の外面に沿って延びており、その向きは、面304の赤道から“極”に至る“子午線”即ち縦方向曲線に沿った向きとなっている。本実施形態では、第1リンク100cに対し隣の第2リンク100dを存分にアーティキュレートさせうるよう、スロット312の差し渡しLが面304の赤道を越えて延びている。本実施形態では、最大アーティキュレーション角にて、第2リンク100dの下面321が第1リンク100cのショルダ320に当接することでアーティキュレーションが制限される。ショルダ320に設けられている窪み322は、第1リンク100cに対する第2リンク100dの自在アーティキュレーションを邪魔することなく、このポジションにあるタブ314を受け容れる。これに代え、タブ314及びそれに対応する窪み322でアーティキュレーション制限機能を実現する構成を採ってもよい。
本実施形態では、第2リンク100dに対しどのようなツイストモーメントが作用している場合でも、第1リンク100cに備わるスロット312の側壁が第2リンク100dに備わるピン306に当接しているので、第1リンク100cに対し第2リンク100dがその長軸周りで回動することを防ぐことができる。同時に、ピン306及びスロット312の相互作用によって、第1リンク100cに対する第2リンク100dのアーティキュレーション、例えば第1リンク100cのアーティキュレーション軸102x,102y(図2参照)を中心にした第2リンク100dのアーティキュレーションが阻止乃至制限されることもない。第1リンク100cに対する第2リンク100dの自在アーティキュレーション性を保ちつつ、第1リンク100cに対する第2リンク100dの不要なツイストが軽減乃至防止されることとなる。
本実施形態では、図3Aに示すように、個々のリンク100c,100d上に2本のピン306及び2個のスロット312が180°間隔で差し向かいに配されている。
これに対し、図3Bに示すように、個々のリンク100d’,100d”,100d”’上にピン306及びスロット312を1個ずつ設けてもよい。本実施形態では、各リンク100d’,100d”,100d”’のピン306及びスロット312が、そのリンク100d’,100d”,100d”’の周縁に沿い120°の角度差で配置されている。組立時には、隣のリンクに対し120°回動させつつ各リンク100d’,100d”,100d”’の角度位置を定め、アーティキュレーティングプローブの手元部から先端部に向かう方向に沿いリンクを連ねていけばよい。アーティキュレーション範囲全体に亘りピン306及びそれに対応するスロット112が係合し続けるので、隣のリンク例えば100d’及び100d”’に対するリンク100d”の不要なツイストを軽減乃至防止するには、1本のピン306と1個のスロット312の係合で十分である。
図4に、本発明の他の実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2アウタリンクの斜視外観を示す。
図4に示すように、本実施形態では、1本又は複数本のピン406及びそれに対応する1個又は複数個のスロット406によってモーションレジスティングアセンブリが構成されている。ピン406は、リンク400a,400bに備わる凸状アーティキュレーション面404の外面に位置している。スロット406は、隣のリンク400a,400bに備わるピン406のうち対応するものと係合しうるような形態で、凹状アーティキュレーション面410aの内側に配されている。図示例におけるピン406及びスロット412の個数は各1個である。
本実施形態では、リンク400a,400bの凸状アーティキュレーション面404が半球状である。従って、半球状凸状アーティキュレーション面404の赤道を越えた位置や同面404の赤道・極間位置にて同面404に向かい合うよう、各リンクのピン406を配置することができる。
スロット412は半球状凹状アーティキュレーション面410aの内面に沿い延びており、その向きは面410aの赤道から極に向かう縦方向曲線即ち子午線に沿っている。本実施形態では、第1リンク400aに対し隣の第2リンク400bを存分にアーティキュレートさせうるようにスロット412の差し渡しLが設定されている。本実施形態では、最大アーティキュレーション角にて、第2リンク400bの下面421が第1リンク400aのショルダ420に当接することでアーティキュレーションが制限される。
本実施形態では、第2リンク400bに対しどのようなツイストモーメントが作用している場合でも、第2リンク400bに備わるスロット412の側壁が第1リンク400aに備わるピン406に当接しているので、第1リンク400aに対し第2リンク400bがその長軸周りで回動することを防ぐことができる。同時に、ピン406及びスロット412の相互作用によって、第1リンク400aに対する第2リンク400bのアーティキュレーション、例えば第1リンク400aのアーティキュレーション軸102x,102y(図2参照)を中心にした第2リンク400bのアーティキュレーションが阻止乃至制限されることもない。第1リンク400aに対する第2リンク400bの自在アーティキュレーション性を保ちつつ、第1リンク400aに対する第2リンク400bの不要なツイストが軽減乃至防止されることとなる。
図5Aに、本発明の他の実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2アウタリンクの側面を示す。図5Bに、図5Aに示した第1及び第2アウタリンクのうち一方の接写側面を示す。図5Cに、図5Bに示したアウタリンクの下方斜視外観を示す。
図5A〜図5Cに示すように、本実施形態では、モーションレジスティングアセンブリが、リンク100e,100fに備わる凸状アーティキュレーション面104の外周縁に沿い互いに離隔配置された複数個のローブ乃至リブ150を有している。本実施形態では凸状アーティキュレーション面104が半球状であり、複数個のローブ150がその凸状アーティキュレーション面104の赤道部に沿い離隔配置されている。これに代え、凸状アーティキュレーション面の赤道部・極部間にローブ150を配するようにしてもよい。ローブ150は平坦なアウタリンキング面152を介し互いに連なっているが、用途によっては、湾曲又は傾斜したリンキング面を使用することもできる。このモーションレジスティングアセンブリは、更に、凹状アーティキュレーション面110の下部内面に沿い互いに離隔配置された複数個の窪み154を有している。窪み154も平坦なインナリンキング面156を介し互いに連なっているが、用途によっては、湾曲又は傾斜したリンキング面を使用することもできる。隣り合うリンクのうち第1リンク100eのローブ150及びアウタリンキング面152は、第2リンク100fの窪み154及びインナリンキング面156に対応するよう配置されている。こうした構成であるので、第1リンク100eに対する第2リンク100fのアーティキュレーション範囲全体に亘り、複数個の窪み154や平坦なインナリンキング面156のうち少なくとも1個が、隣接リンクに備わるローブ150乃至アウタリンキング面152のうち対応するものに対し、係合状態を保つこととなる。本実施形態では、第1リンク100eに対する第2リンク100fのアーティキュレーション角が0°のポジションにて、全てのローブ150及びアウタリンキング面152の(少なくとも)上部が、対応する窪み154及びインナリンキング面156の(少なくとも)下部に係合することとなる。その一方で、第2リンク100fの下面121と第1リンク100eのショルダ120の接触による制限を受けるフルアーティキュレーションのポジション、例えば図5Aのポジションでは、左端のローブ150及び対応する窪み154が完全に係合し、中央のローブ150及び窪み154が部分的に係合し、右端のローブ150及び窪み154が外れることとなる。
本実施形態では、第2リンク100fに対しどのようなツイストモーメントが作用している場合でも、第2リンク100fに備わる窪み154の内壁及びインナリンキング面156が、第1リンク100eに備わるローブ150及びアウタリンキング面152に当接しているので、第2リンク100fがその長軸周りで回動することを防ぐことができる。同時に、窪み154及びローブ150並びにインナリンキング面156及びアウタリンキング面152の相互作用によって、第1リンク100eに対する第2リンク100fのアーティキュレーション、例えば第1リンク100eのアーティキュレーション軸102x,102y(図2参照)を中心にした第2リンク100fのアーティキュレーションが阻止乃至制限されることもない。第1リンク100eに対する第2リンク100fの自在アーティキュレーション性を保ちつつ、不要なツイストが軽減乃至防止されることとなる。
本実施形態では、図5A〜図5Cに示すように、6個のローブ150及びそれに対応する窪み154が、嵌まり合う六角形のリンクに沿って均等に分散配置されている。しかし、ローブ150及び窪み154の個数は任意に定めることができる。例えば、ローブ150や窪み154を各2〜8個又はそれ以上設けてもよい。ローブ150の個数は窪み154の個数と同一でもよいし非同一でもよい。リンクの周りにローブや窪みを等角度間隔で設けてもよいし、非等角度間隔で設けてもよい。アウタリンキング面152として平坦なものを示したが、用途次第で、湾曲付きや傾斜付きの面にもすることができる。同様に、インナリンキング面156として平坦なものを示したが、用途次第で、湾曲付きや傾斜付きの面にもすることができる。
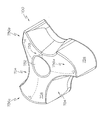
図6Aに、本発明の他の実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2アウタリンクの下方斜視外観を示す。図6Bに、図6Aに示した第1及び第2アウタリンクのうち一方の上方斜視外観を示す。図6Cに、図6Bに示したアウタリンクの下方斜視外観を示す。
図6A〜図6Cに示すように、本実施形態では、モーションレジスティングアセンブリが、第1リンク100gの上部128に備わる凸状第1アーティキュレーション面604と、その第1リンク100gに隣り合う第2リンク100hの下部に備わる凹状第2アーティキュレーション面610とで構成されている。
本実施形態では、凸状第1アーティキュレーション面604が半楕円体面、凹状第2アーティキュレーション面610も半楕円体面となっている。この半楕円体面については、アーティキュレーション軸102x,102y(図2参照)により規定される平面に沿いメジャー軸(長径軸)Amajor及びマイナー軸(短径軸)Aminorを定義することができる。図6B及び図6Cに示すように、凸状第1アーティキュレーション面604及び凹状第2アーティキュレーション面610のいずれについても、メジャー軸Amajorの長さはマイナー軸Aminorのそれより大きくなっている。
半楕円体状の凸状第1アーティキュレーション面604と、その隣のリンク上にある半楕円体状の凹状第2アーティキュレーション面610との相互作用は、第1リンク100gに対する第2リンク100hの自在アーティキュレーションに役立っている。アーティキュレーションの範囲は、例えば、前掲の諸実施形態について述べた通り、第1リンク100gのショルダ120に対する第2リンク100hの下面121の位置関係によって制限される。
本実施形態では、第2リンク100hに対しどのようなツイストモーメントが作用している場合でも、隣り合うリンクの相対応する半楕円体面(604,610)が細長い形状を呈しているため、第1リンク100gの長軸602zgに対し第2リンク100hがその長軸周りで回動することを防ぐことができる。同時に、半楕円体面(604,610)の相互作用によって、第1リンク100gに対する第2リンク100hのアーティキュレーション、例えば第1リンク100gのアーティキュレーション軸102x,102y(図2参照)を中心にした第2リンク100hのアーティキュレーションが阻止乃至制限されることもない。第1リンク100gに対する第2リンク100hの自在アーティキュレーション性を保ちつつ、第1リンク100gに対する第2リンク100hの不要なツイストが軽減乃至防止されることとなる。
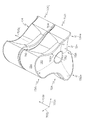
図7Aに、本発明の他の実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2インナリンクの下方斜視外観を示す。図7Bに、図7Aに示した第1及び第2インナリンクのうち一方の上方斜視外観を示す。
図7A及び図7Bに示すように、本実施形態では、モーションレジスティングアセンブリが、第1リンク700iの上面に備わる第1アーティキュレーション面704と、その第1リンク700iに隣り合う第2リンク700jの下面に備わる第2アーティキュレーション面710とで構成されている。
本実施形態では、図7A及び図7Bに示すように、第1リンク700i及び第2リンク700jがアーティキュレーティングプローブのインナリンクとして使用される。これらインナリンク700i,700jは、アウタリンク配列内に生じる長尺開口内に配置しうるように構成されている。
本実施形態では、対応する長軸702zi,702zjに沿いそのリンク700を長尺方向に通るように、第1リンク700i及び第2リンク700j(総称して700)に中央ケーブル開口732が設けられている。このケーブル開口732の形状は、アーティキュレーティングプローブを構成するインナ機構用の操作ケーブルを通せるように設定されている。本実施形態では、第1及び第2リンクの最外面734が円上に位置している。本実施形態では、上述のようにアウタリンクの内面とインナリンクの外面との間に来るチャネル即ちアーティキュレーティングプローブのワーキングチャネルを受け容れうるように、窪み724が設けられている。本実施形態では、このワーキングチャネル窪み724の個数が3個であるため、各リンクが、3個のローブ部736a〜736cを有しそれらでケーブル開口732が取り巻かれる形状となっている。
本実施形態では、第1アーティキュレーション面704に凸状の部分及び凹状の部分が備わっている。例えば、図7Bに示すように、第1アーティキュレーション面704のうち点G・H間即ち第1ローブ部736a・第2ローブ部736b間は凸状になっている。同時に、第1アーティキュレーション面704のうち点E・F間、即ち第3ローブ部736cと第1ローブ部736a・第2ローブ部736b間に位置するサドル部738との間は凹状になっている。
同様に、図7Aに示す第2アーティキュレーション面710にも、隣のリンクの第1アーティキュレーション面704に対応するよう凸状の部分及び凹状の部分が設けられている。例えば、第2アーティキュレーション面710のうち点C・D間即ち第1ローブ部736a・第2ローブ部736b間は凹状である。同時に、第2アーティキュレーション面710のうち点A・B間、即ち第3ローブ部736cと第1ローブ部736a・第2ローブ部736b間に位置するサドル部738との間は凸状になっている。
従って、第1アーティキュレーション面704の凸状部分を、隣のリンクに備わる第2アーティキュレーション面710の凹状部分に嵌め合わすことができる。同様に、第1アーティキュレーション面704の凹状部分を、隣のリンクに備わる第2アーティキュレーション面710の凸状部分に嵌め合わすことができる。
第1アーティキュレーション面704に備わる凸状部分及び凹状部分と、その隣のリンクの第2アーティキュレーション面710に備わる凹状部分及び凸状部分との相互作用は、第1リンク700iに対する第2リンク700jの自在アーティキュレーションに役立っている。例えば、第2アーティキュレーション面の点C・D間凹状部分と、隣のリンクの第1アーティキュレーション面に備わる相応形状部分との相互作用により、第1面に沿った自在アーティキュレーションが可能になる。第2アーティキュレーション面の点A・C間凸状部分と、隣のリンクの第1アーティキュレーション面に備わる相応形状部分との相互作用により、第2面に沿った自在アーティキュレーションが可能になる。
本実施形態では、第2リンク700jに対しどのようなツイストモーメントが作用している場合でも、第1アーティキュレーション面704上の凸状部分及び凹状部分が第2アーティキュレーション面710上の対向部分とかみ合っているので、第1リンク700iの長軸702ziに対し第2リンク700jがその長軸702zj周りで回動することを防ぎ又は抑えることができる。同時に、凸状部分及びその向かいにある凹状部分の相互作用によって、第1リンク700iに対する第2リンク700jのアーティキュレーション、例えば第1リンク700iの第1アーティキュレーション軸702x及び第2アーティキュレーション軸702yを中心にした第2リンク700jのアーティキュレーションが阻止乃至制限されることもない。第1リンク700iに対する第2リンク700jの自在アーティキュレーション性を保ちつつ、第1リンク700iに対する第2リンク700jの不要なツイストが軽減乃至防止されることとなる。
なお、本実施形態に関わる着想、即ち差し向かいにある凸状部分と凹状部分を嵌め合わすという着想は、インナリンク700に限らず、アーティキュレーションプローブのアウタリンク100にも適用することができる。
図8A〜図8Cに、本発明の他の実施形態に係る医療手順実行システムのアーティキュレーティングプローブに備わる第1及び第2アウタリンクの上面を示す。
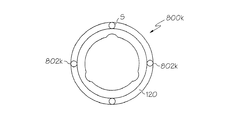
図8Aに示す実施形態では、第1リンク800kのショルダ120に沿い複数個の第1マグネット802kが配置されている。ショルダ120に沿った第1マグネット802kの配置角度間隔は一定とされている。図示例ではその間隔が90°となっている。同様に、第1リンクのそれに対応するよう、第2リンク800lの下面121沿いにも複数個の第2マグネット802lが配置されている。本実施形態では、第1リンク800kのショルダ120上に位置する第1マグネット802kの端部が第1極性例えばS、第2リンク800lの下面121上に位置する第2マグネット802lの端部が第2極性例えばNを呈している。対をなすマグネット802k,802l同士が異極性であればよいので、個々のリンク上で全マグネットが同一極性になっていなくてもよい。
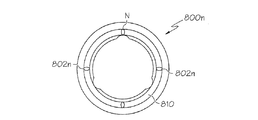
図8Bに示す実施形態では、第1リンク800mの凸状第1アーティキュレーション面804に沿い複数個の第1マグネット802mが配置されている。第1アーティキュレーション面804に沿った第1マグネット802mの配置角度間隔は一定とされている。図示例ではその間隔が90°となっている。同様に、第1リンク800mのそれに対応するよう、第2リンク800nの凹状第2アーティキュレーション面810沿いにも複数個の第2マグネット802nが配置されている。本実施形態では、第1リンク800m上に位置する第1マグネット802mが第1極性例えばS、第2リンク800n上に位置する第2マグネット802nが第2極性例えばNを呈している。対をなすマグネット802m,802n同士が異極性であればよいので、個々のリンク上で全マグネットが同一極性になっていなくてもよい。
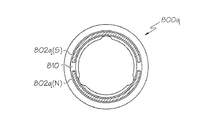
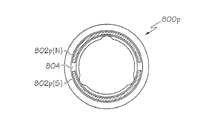
図8Cに示す実施形態では、第1リンク800pの凸状第1アーティキュレーション面804に沿い周をなすよう複数本の第1磁気ストリップ802pが配置されている。第1アーティキュレーション面804に沿った第1磁気ストリップ802pの配置角度間隔は一定とされている。図示例では、第1磁気ストリップ802pの本数が2本、その間隔が180°となっている。同様に、第2リンク800qの凹状第2アーティキュレーション面810沿いにも、第1リンク800p上のストリップに対応する向きにて、複数本の第2磁気ストリップ802qが配置されている。本実施形態では、第1リンク800p上に位置する第1磁気ストリップ802pが第1極性例えばS、第2リンク800q上に位置する第2磁気ストリップ802qが第2極性例えばNを呈している。対をなすストリップ802p,802qが異極性であればよいので、個々のリンク上で全ストリップが同一極性になっていなくてもよい。
これらの実施形態では、第1リンクに対する第2リンクのアーティキュレーション角度範囲全体に亘り磁気的に結合するよう、第1及び第2マグネット(乃至ストリップ)が配置されている。隣り合うリンクに備わるマグネット間の磁気的結合は、第1リンクに対する第2リンクのアーティキュレーションに役立っている。上掲の諸実施形態に関し述べた通り、このアーティキュレーションは、第2リンクのショルダ120に対する第1リンクの下面121の位置関係等で制限されうる。
図8〜図8Cに示した実施形態では、第2リンクに対しどのようなツイストモーメントが作用している場合でも、隣り合うリンク間が磁気的に相互作用しているので、第1リンクの長軸に対し第2リンクがその長軸周りで回動することを防ぐこと或いは抑えることができる。同時に、この磁気的相互作用によって、第1リンクに対する第2リンクのアーティキュレーションが阻止乃至制限されることもない。第1リンクに対する第2リンクの自在アーティキュレーション性を保ちつつ、第1リンクに対する第2リンクの不要なツイストが軽減乃至防止されることとなる。図8〜図8Cに示した実施形態を上掲の諸実施形態と組み合わせることで、リンクのツイストを更に制限乃至軽減することができる。
また、これらの実施形態では、アーティキュレーティングプローブのアウタリンクに対しマグネットが適用されているが、同様の着想乃至原理をインナリンクに適用することもできる。
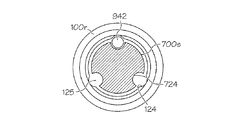
図9に、本発明の一実施形態におけるインナリンク、アウタリンク及びその間に挟まるアンチツイスト部材の断面を示す。
図9に示すように、このアーティキュレーティングプローブには、中央開口を有するアウタリンク100rのアセンブリが備わっている。インナリンク700sのアセンブリはそれらアウタリンク100rの中央開口内に収まっている。図示の通り、複数個あるアウタリンク100rの内面上には窪み124が、また同じく複数個あるインナリンク700sの側壁上には窪み724がある。これらの窪み124,724は差し向かいにあり、本願記載の目的その他に役立つアーティキュレーティングプローブ用のワーキングチャネルを形成している。
そのワーキングチャネル125のうち少なくとも1個にはアンチツイスト部材942が収まっている。本実施形態におけるアンチツイスト部材942は管状部材である(中空断面でも中実断面でもよい)。アンチツイスト部材942は、隣接インナリンクのアーティキュレーション及び隣接アウタリンクのアーティキュレーションが可能になるよう、可撓性のある素材で形成するとよい。同時に、この管状部材には、隣接リンク間ツイスト運動にさらされたときに強度乃至剛性を発揮させることができる。本実施形態では、こうしたアンチツイスト部材942が、アーティキュレーティングプローブの手元部から先端部にかけ、ワーキングチャネル125の(ほぼ)全長に亘り延設されている。アンチツイスト部材942を複数個の部分に分け、ワーキングチャネル125内諸部分に通すようにしてもよい。アンチツイスト部材942を、インナリンク700sの窪み724やアウタリンク100rの窪み124に固定してもよい。アンチツイスト部材942を、インナリンク700sの窪み724及びアウタリンク100rの窪み124の双方に固定してもよい。
本実施形態では、この管状のアンチツイスト部材942がその手元部及び先端部で固定される。アンチツイスト部材942のねじり剛性によって、ツイストを防げる度合いが決まってくる。
図9に示した実施形態では、第1リンクの隣にある第2リンクに対しどのようなツイストモーメントが作用している場合でも、アンチツイスト部材が存在しているので、第1リンクの長軸に対し第2リンクがその長軸周りで回動することを防ぐことができる。同時に、アンチツイスト部材の働きによって、第1リンクに対する第2リンクのアーティキュレーションが(僅かに)阻止乃至制限されることもない。第1リンクに対する第2リンクの自在アーティキュレーション性を保ちつつ、不要なツイストが軽減乃至防止されることとなる。図9に示した実施形態を上掲の諸実施形態と組み合わせることで、リンクのツイストを更に制限乃至軽減することができる。
以上説明したように、本発明に係るシステム及び方法によれば、高アーティキュレーテッドロボットシステム内リンクシステムを構成するリンク間のねじり回動即ちツイストを、阻止、軽減乃至制限することができる。本システム及び方法は、そのロボットシステムを構成するインナリンク機構にもアウタリンク機構にも適用可能である。それにより、例えば、第1リンクに対する第2リンクの回動角を約1°に制限することができる。なお、構成次第ではこれ以外の制限値にすることもできるので、本発明がこの値による限定を受けるわけではない。
以上、その実施形態を参照しつつ本発明につき具体的に説明したが、いわゆる当業者には自明な通り、別紙特許請求の範囲で規定される本発明の技術的範囲内で様々な形態変形乃至細部変形を施すことができる。
Claims (23)
- それぞれ第1長軸及び内面を有し、当該内面に第1凹状部分があり、当該第1凹状部分が第1長軸に沿って延びる複数個のアウタリンクと、
それぞれ第2長軸及び外面を有し、当該外面に第2凹状部分があり、当該第2凹状部分が第1凹状部分に対応すると共に、当該第2凹状部分は第2長軸に沿って延びる複数個のインナリンクと、
アウタリンクに備わる複数個の第1凹状部分と、そのそれぞれに対応する、インナリンクに備わる複数個の第2凹状部分との間にあり、インナリンク同士の二自由度アーティキュレーション及びアウタリンク同士の二自由度アーティキュレーションを可能とするアンチツイスト部材であって、複数個のインナリンクのうちの第1のインナリンクの、隣の第2のインナリンクに対する回動、及び複数個のアウタリンクのうちの第1のアウタリンクの、隣の第2のアウタリンクに対する回動を制限するアンチツイスト部材と、
を備えるアーティキュレーティングプローブ。 - 請求項1記載のアーティキュレーティングプローブであって、複数個のインナリンクのうちの第1のインナリンクの、隣の第2のインナリンクに対する回動は、第2長軸について制限される、アーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、複数個のアウタリンクのうちの第1のアウタリンクの、隣の第2のアウタリンクに対する回動は、第1長軸について制限される、アーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、複数個のアウタリンクの各第1凹状部分及びそのそれぞれに対応する複数個のインナリンクの各第2凹状部分により本アーティキュレーティングプローブのワーキングチャネルが構成されているアーティキュレーティングプローブ。
- 請求項4記載のアーティキュレーティングプローブであって、アンチツイスト部材が、ワーキングチャンネルの全長に亘って延設されるアーティキュレーティングプローブ。
- 請求項4記載のアーティキュレーティングプローブであって、アンチツイスト部材が分断されているアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、アンチツイスト部材が管状部材であるアーティキュレーティングプローブ。
- 請求項7記載のアーティキュレーティングプローブであって、管状部材が手元部及び先端部を含み、その手元部において管状部材が固定されるアーティキュレーティングプローブ。
- 請求項7記載のアーティキュレーティングプローブであって、管状部材が手元部及び先端部を含み、その先端部において管状部材が固定されるアーティキュレーティングプローブ。
- 請求項7記載のアーティキュレーティングプローブであって、管状部材の断面は中実断面である、アーティキュレーティングプローブ。
- 請求項7記載のアーティキュレーティングプローブであって、管状部材の断面は中空断面である、アーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、アンチツイスト部材は、隣接インナリンクのアーティキュレーション及び隣接アウタリンクのアーティキュレーションが可能になるよう、可撓性のある素材で構成されるアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、アンチツイスト部材が、複数個のアウタリンクの第1凹状部分のうちの少なくとも1個に固定されるアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、アンチツイスト部材が、複数個のインナリンクの第2凹状部分のうちの少なくとも1個に固定されるアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、アンチツイスト部材が、複数個のアウタリンクの第1凹状部分のうちの少なくとも1個に固定され、且つ、複数個のインナリンクの第2凹状部分のうちの少なくとも1個に固定されるアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、複数個のアウタリンクが手元アウタリンク及び先端アウタリンクを含み、複数個のインナリンクが手元インナリンク及び先端インナリンクを含むアーティキュレーティングプローブ。
- 請求項16記載のアーティキュレーティングプローブであって、アンチツイスト部材が、手元アウタリンクと先端アウタリンクとの間に延びているアーティキュレーティングプローブ。
- 請求項16記載のアーティキュレーティングプローブであって、アンチツイスト部材が手元インナリンクと先端インナリンクとの間に延びているアーティキュレーティングプローブ。
- 請求項16記載のアーティキュレーティングプローブであって、アンチツイスト部材が、手元アウタリンクと先端アウタリンクとの間で分断されているアーティキュレーティングプローブ。
- 請求項16記載のアーティキュレーティングプローブであって、アンチツイスト部材が、手元インナリンクと先端インナリンクとの間で分断されているアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、アンチツイスト部材として複数個のアンチツイスト部材が存在するアーティキュレーティングプローブ。
- 請求項1記載のアーティキュレーティングプローブであって、各アウタリンクが複数個の第1凹状部分を含み、各インナリンクが、アウタリンクの複数個の第1凹状部分にそれぞれ対応する複数個の第2凹状部分を含むアーティキュレーティングプローブ。
- 請求項22記載のアーティキュレーティングプローブであって、アンチツイスト部材が、複数個の第1凹状部分と複数個の第2凹状部分との間に配置された複数個のアンチツイスト部材で構成されるアーティキュレーティングプローブ。
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161534032P | 2011-09-13 | 2011-09-13 | |
| US61/534,032 | 2011-09-13 | ||
| US201161578582P | 2011-12-21 | 2011-12-21 | |
| US61/578,582 | 2011-12-21 | ||
| US201261656600P | 2012-06-07 | 2012-06-07 | |
| US61/656,600 | 2012-06-07 | ||
| US201261681340P | 2012-08-09 | 2012-08-09 | |
| US61/681,340 | 2012-08-09 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014530749A Division JP6395605B2 (ja) | 2011-09-13 | 2012-09-12 | アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018187408A JP2018187408A (ja) | 2018-11-29 |
| JP6564501B2 true JP6564501B2 (ja) | 2019-08-21 |
Family
ID=47883938
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014530749A Expired - Fee Related JP6395605B2 (ja) | 2011-09-13 | 2012-09-12 | アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 |
| JP2018121557A Expired - Fee Related JP6564501B2 (ja) | 2011-09-13 | 2018-06-27 | アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014530749A Expired - Fee Related JP6395605B2 (ja) | 2011-09-13 | 2012-09-12 | アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (3) | US9757856B2 (ja) |
| EP (2) | EP3321042A1 (ja) |
| JP (2) | JP6395605B2 (ja) |
| KR (1) | KR20140065418A (ja) |
| CN (1) | CN104010773B (ja) |
| AU (3) | AU2012308731B2 (ja) |
| BR (1) | BR112014005937A2 (ja) |
| CA (1) | CA2848041A1 (ja) |
| IL (2) | IL231331B (ja) |
| IN (1) | IN2014CN02450A (ja) |
| WO (1) | WO2013039999A2 (ja) |
Families Citing this family (203)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| EP2446803A1 (en) * | 2004-06-25 | 2012-05-02 | Carnegie-Mellon University | Steerable, follow the leader device |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US11998198B2 (en) | 2004-07-28 | 2024-06-04 | Cilag Gmbh International | Surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US8632535B2 (en) | 2007-01-10 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Interlock and surgical instrument including same |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US20080169333A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Surgical stapler end effector with tapered distal end |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| JP5410110B2 (ja) | 2008-02-14 | 2014-02-05 | エシコン・エンド−サージェリィ・インコーポレイテッド | Rf電極を有する外科用切断・固定器具 |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US10390823B2 (en) | 2008-02-15 | 2019-08-27 | Ethicon Llc | End effector comprising an adjunct |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US9282962B2 (en) | 2010-09-30 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Adhesive film laminate |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US12213666B2 (en) | 2010-09-30 | 2025-02-04 | Cilag Gmbh International | Tissue thickness compensator comprising layers |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| CA2858831A1 (en) * | 2011-12-21 | 2013-06-27 | Robert Anderson | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| MX350846B (es) | 2012-03-28 | 2017-09-22 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende cápsulas que definen un ambiente de baja presión. |
| RU2014143258A (ru) | 2012-03-28 | 2016-05-20 | Этикон Эндо-Серджери, Инк. | Компенсатор толщины ткани, содержащий множество слоев |
| US9713873B2 (en) * | 2012-05-12 | 2017-07-25 | Massachusetts Institute Of Technology | Continuum style manipulator actuated with phase change media |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US12383267B2 (en) | 2012-06-28 | 2025-08-12 | Cilag Gmbh International | Robotically powered surgical device with manually-actuatable reversing system |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| JP6345707B2 (ja) | 2013-03-01 | 2018-06-20 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | ソフトストップを備えた外科用器具 |
| US20140275779A1 (en) * | 2013-03-12 | 2014-09-18 | Covidien Lp | Flexible Shaft with Multiple Flexible Portions |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| EP2996619A4 (en) * | 2013-05-02 | 2017-01-18 | Medrobotics Corporation | A robotic system including a cable interface assembly |
| US20150053746A1 (en) | 2013-08-23 | 2015-02-26 | Ethicon Endo-Surgery, Inc. | Torque optimization for surgical instruments |
| WO2015081008A1 (en) | 2013-11-27 | 2015-06-04 | Medrobotics Corporation | Oral retraction devices and methods |
| WO2015079809A1 (ja) * | 2013-11-29 | 2015-06-04 | オリンパス株式会社 | 内視鏡の湾曲部 |
| US10013049B2 (en) | 2014-03-26 | 2018-07-03 | Ethicon Llc | Power management through sleep options of segmented circuit and wake up control |
| US12232723B2 (en) | 2014-03-26 | 2025-02-25 | Cilag Gmbh International | Systems and methods for controlling a segmented circuit |
| MX2016012110A (es) * | 2014-03-31 | 2017-01-19 | Human Extensions Ltd | Dispositivo medico orientable. |
| US9801627B2 (en) | 2014-09-26 | 2017-10-31 | Ethicon Llc | Fastener cartridge for creating a flexible staple line |
| US20150297225A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| CN106456159B (zh) | 2014-04-16 | 2019-03-08 | 伊西康内外科有限责任公司 | 紧固件仓组件和钉保持器盖布置结构 |
| JP6612256B2 (ja) | 2014-04-16 | 2019-11-27 | エシコン エルエルシー | 不均一な締結具を備える締結具カートリッジ |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| US11273290B2 (en) * | 2014-09-10 | 2022-03-15 | Intuitive Surgical Operations, Inc. | Flexible instrument with nested conduits |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10433844B2 (en) | 2015-03-31 | 2019-10-08 | Ethicon Llc | Surgical instrument with selectively disengageable threaded drive systems |
| AU2016252513A1 (en) * | 2015-04-20 | 2017-11-23 | Medrobotics Corporation | Articulated robotic probes |
| US10307149B2 (en) * | 2015-04-29 | 2019-06-04 | Manual Surgical Sciences L.L.C. | Intraluminal retractor |
| GB2540930B (en) * | 2015-07-13 | 2020-10-28 | Cmr Surgical Ltd | Flexible robotic surgical instrument |
| JP7082052B2 (ja) | 2015-09-03 | 2022-06-07 | ネプチューン メディカル インク. | 小腸内での内視鏡前進の為の器具 |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10561420B2 (en) | 2015-09-30 | 2020-02-18 | Ethicon Llc | Tubular absorbable constructs |
| US9796081B2 (en) * | 2015-11-25 | 2017-10-24 | Tata Consultancy Services Limited | Robotic snake |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10548673B2 (en) | 2016-08-16 | 2020-02-04 | Ethicon Llc | Surgical tool with a display |
| CN110191667B (zh) | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| US10636555B2 (en) * | 2016-08-22 | 2020-04-28 | Seyed Mostafa Zareei | Articulated video probe with magnetic stimulation |
| US11160551B2 (en) | 2016-12-21 | 2021-11-02 | Cilag Gmbh International | Articulatable surgical stapling instruments |
| US10758230B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument with primary and safety processors |
| US10624635B2 (en) | 2016-12-21 | 2020-04-21 | Ethicon Llc | Firing members with non-parallel jaw engagement features for surgical end effectors |
| JP7010957B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | ロックアウトを備えるシャフトアセンブリ |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| WO2018213153A1 (en) * | 2017-05-15 | 2018-11-22 | Boston Scientific Scimed, Inc. | Tissue deflecting devices and related methods of use |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| EP4070740B1 (en) | 2017-06-28 | 2025-03-26 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| CN111065311B (zh) | 2017-07-20 | 2022-06-10 | 海王星医疗公司 | 动态刚性化外套管 |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US20210127947A1 (en) * | 2017-10-20 | 2021-05-06 | Anqing Medical Co., Ltd | Multi-section bending tube having graduated rigidity, insertion tube for endoscope using the bending tube, and endoscope |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| WO2019090288A1 (en) | 2017-11-06 | 2019-05-09 | Medrobotics Corporation | Robotic system wiht articulating probe and articulating camera |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| KR102130881B1 (ko) * | 2017-12-20 | 2020-07-06 | 한국과학기술원 | 자기력을 이용한 관절 장치 |
| US11883019B2 (en) | 2017-12-21 | 2024-01-30 | Cilag Gmbh International | Stapling instrument comprising a staple feeding system |
| US12336705B2 (en) | 2017-12-21 | 2025-06-24 | Cilag Gmbh International | Continuous use self-propelled stapling instrument |
| JP2021058224A (ja) * | 2017-12-25 | 2021-04-15 | ジョンソン・エンド・ジョンソン株式会社 | ジョイント部材、処置具、処置具の屈曲制御方法 |
| USD874655S1 (en) | 2018-01-05 | 2020-02-04 | Medrobotics Corporation | Positioning arm for articulating robotic surgical system |
| US11458641B2 (en) * | 2018-05-23 | 2022-10-04 | General Electric Company | Robotic arm assembly construction |
| EP3801187B1 (en) | 2018-05-31 | 2024-02-07 | Neptune Medical Inc. | Device for enhanced visualization of the small intestine |
| IL259807B (en) | 2018-06-04 | 2020-02-27 | Valuebiotech Israel Ltd | Articulated arm vertebra |
| CA3106275A1 (en) | 2018-07-19 | 2020-01-23 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US20200054321A1 (en) | 2018-08-20 | 2020-02-20 | Ethicon Llc | Surgical instruments with progressive jaw closure arrangements |
| US12194620B2 (en) | 2018-10-15 | 2025-01-14 | Oliver Crisipin Robotics Limited | Selectively flexible extension tool |
| US11702955B2 (en) | 2019-01-14 | 2023-07-18 | General Electric Company | Component repair system and method |
| US11666464B2 (en) | 2019-01-28 | 2023-06-06 | Tensor Flow Ventures Llc | Magnetic stent and stent delivery |
| US12161573B2 (en) | 2019-01-28 | 2024-12-10 | Tensor Flow Ventures Llc | Stent and stent delivery for vascular surgery |
| KR102128269B1 (ko) * | 2019-04-09 | 2020-07-08 | 한국과학기술연구원 | 구름 조인트와 핀 커플링을 이용한 관절 구조체 및 이를 구비한 튜브 삽입형 장치 |
| JP7055767B2 (ja) * | 2019-04-11 | 2022-04-18 | 日本発條株式会社 | 可撓部材 |
| US11793392B2 (en) | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| US12329473B2 (en) | 2019-04-17 | 2025-06-17 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US20200345359A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Tissue stop for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| KR102245962B1 (ko) * | 2019-05-15 | 2021-04-29 | 한국과학기술연구원 | 구름 조인트와 돌기 부재를 이용한 관절 구조체 및 이를 구비한 튜브 삽입형 장치 |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| KR102194958B1 (ko) * | 2019-07-16 | 2020-12-24 | 재단법인대구경북과학기술원 | 허리 근력 지원을 위한 착용형 장치 |
| CN112568858A (zh) * | 2019-09-30 | 2021-03-30 | 重庆西山科技股份有限公司 | 内窥镜蛇骨单元、蛇骨组件及内窥镜 |
| US12405187B2 (en) | 2019-10-04 | 2025-09-02 | General Electric Company | Insertion apparatus for use with rotary machines |
| US12035913B2 (en) | 2019-12-19 | 2024-07-16 | Cilag Gmbh International | Staple cartridge comprising a deployable knife |
| US11752622B2 (en) | 2020-01-23 | 2023-09-12 | General Electric Company | Extension tool having a plurality of links |
| US11300480B2 (en) | 2020-02-28 | 2022-04-12 | Baker Hughes Oilfield Operations Llc | Articulated non-destructive testing device having a plurality of actuation systems and a method of articulating the device |
| US11371437B2 (en) | 2020-03-10 | 2022-06-28 | Oliver Crispin Robotics Limited | Insertion tool |
| AU2021245989A1 (en) | 2020-03-30 | 2022-10-27 | Neptune Medical Inc. | Layered walls for rigidizing devices |
| JP7696032B2 (ja) * | 2020-05-08 | 2025-06-19 | 株式会社バンダイ | 可動構造および玩具 |
| US12091981B2 (en) | 2020-06-11 | 2024-09-17 | General Electric Company | Insertion tool and method |
| US12064107B2 (en) | 2020-07-28 | 2024-08-20 | Cilag Gmbh International | Articulatable surgical instruments with articulation joints comprising flexible exoskeleton arrangements |
| US11925321B2 (en) | 2020-08-06 | 2024-03-12 | Canon U.S.A., Inc. | Anti-twist tip for steerable catheter |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US12053175B2 (en) | 2020-10-29 | 2024-08-06 | Cilag Gmbh International | Surgical instrument comprising a stowed closure actuator stop |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| CN112356016B (zh) * | 2020-11-23 | 2022-02-08 | 长沙理工大学 | 一种可实现弯曲运动解耦的丝驱动构节 |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US12471982B2 (en) | 2020-12-02 | 2025-11-18 | Cilag Gmbh International | Method for tissue treatment by surgical instrument |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US12416800B2 (en) | 2021-01-08 | 2025-09-16 | General Electric Company | Insertion tool |
| US12504616B2 (en) | 2021-01-08 | 2025-12-23 | General Electric Company | Insertion tool |
| CN112873190A (zh) * | 2021-01-13 | 2021-06-01 | 大连理工大学 | 一种多段绳索驱动的连续型张拉整体机器人 |
| JP2024505529A (ja) | 2021-01-29 | 2024-02-06 | ネプチューン メディカル インク. | 動的に剛体化する装置の意図しない運動を防止するデバイスおよび方法 |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US12108951B2 (en) | 2021-02-26 | 2024-10-08 | Cilag Gmbh International | Staple cartridge comprising a sensing array and a temperature control system |
| US12324580B2 (en) | 2021-02-26 | 2025-06-10 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| AU2022233165A1 (en) | 2021-03-10 | 2023-09-28 | Neptune Medical Inc. | Control of robotic dynamically rigidizing composite medical structures |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| KR102559600B1 (ko) * | 2021-04-06 | 2023-07-25 | 주식회사 로엔서지컬 | 수술도구의 비대칭 구름 관절 장치 |
| US11918217B2 (en) | 2021-05-28 | 2024-03-05 | Cilag Gmbh International | Stapling instrument comprising a staple cartridge insertion stop |
| CN113499142B (zh) * | 2021-07-14 | 2023-09-01 | 天津大学医疗机器人与智能系统研究院 | 前端执行装置、手术器械、从手端及微创手术系统 |
| US20230026939A1 (en) | 2021-07-26 | 2023-01-26 | Tensor Flow Ventures Llc | Dual stent and delivery system, delivery tool apparatus, and method of delivery of dual stents |
| US20230277348A1 (en) | 2021-07-26 | 2023-09-07 | Tensor Flow Ventures Llc | Dual stent and delivery system, delivery tool apparatus, and method of delivery of dual stents |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US12089841B2 (en) | 2021-10-28 | 2024-09-17 | Cilag CmbH International | Staple cartridge identification systems |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US12432790B2 (en) | 2021-10-28 | 2025-09-30 | Cilag Gmbh International | Method and device for transmitting UART communications over a security short range wireless communication |
| US12329354B2 (en) | 2022-02-02 | 2025-06-17 | Canon U.S.A, Inc. | Antitwist mechanism for robotic endoscope camera |
| KR20250003955A (ko) | 2022-04-27 | 2025-01-07 | 넵튠 메디컬 인코포레이티드 | 내시경용 위생 외장 |
| CN115488868B (zh) * | 2022-10-12 | 2024-05-28 | 大连海事大学 | 一种自主重组蛇形机器人 |
| CN116945226A (zh) * | 2023-07-31 | 2023-10-27 | 东莞市奕东机械设备有限公司 | 机械臂及自充电机器人 |
| WO2025054618A1 (en) | 2023-09-07 | 2025-03-13 | Neptune Medical Inc. | Pressure rigidization apparatuses and methods |
| WO2025072977A1 (en) | 2023-09-28 | 2025-04-03 | Neptune Medical Inc. | Telescoping robot |
Family Cites Families (165)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3060972A (en) | 1957-08-22 | 1962-10-30 | Bausch & Lomb | Flexible tube structures |
| US3557780A (en) | 1967-04-20 | 1971-01-26 | Olympus Optical Co | Mechanism for controlling flexure of endoscope |
| US3583393A (en) | 1967-12-26 | 1971-06-08 | Olympus Optical Co | Bendable tube assembly |
| US3572325A (en) | 1968-10-25 | 1971-03-23 | Us Health Education & Welfare | Flexible endoscope having fluid conduits and control |
| JPS4831554B1 (ja) | 1968-12-24 | 1973-09-29 | ||
| US3638973A (en) | 1969-06-04 | 1972-02-01 | Charles Ellis Poletti | Joint means for use in work supporting arm |
| US3625200A (en) * | 1969-08-26 | 1971-12-07 | Us Catheter & Instr Corp | Controlled curvable tip member |
| US3739770A (en) | 1970-10-09 | 1973-06-19 | Olympus Optical Co | Bendable tube of an endoscope |
| US3703968A (en) | 1971-09-20 | 1972-11-28 | Us Navy | Linear linkage manipulator arm |
| GB1372327A (en) | 1971-10-11 | 1974-10-30 | Commissariat Energie Atomique | Articulated manipulator |
| US3892228A (en) | 1972-10-06 | 1975-07-01 | Olympus Optical Co | Apparatus for adjusting the flexing of the bending section of an endoscope |
| US3920972A (en) | 1974-07-16 | 1975-11-18 | Cincinnati Milacron Inc | Method and apparatus for programming a computer operated robot arm |
| FR2278457A1 (fr) | 1974-07-18 | 1976-02-13 | Commissariat Energie Atomique | Manipulateur motorise a cables |
| US4108211A (en) | 1975-04-28 | 1978-08-22 | Fuji Photo Optical Co., Ltd. | Articulated, four-way bendable tube structure |
| SE401637B (sv) | 1976-03-29 | 1978-05-22 | Asea Ab | Forfarande och anordning for att bringa en industrirobot att utfora en komplex rorelse |
| US4054128A (en) * | 1976-09-28 | 1977-10-18 | Universite De Sherbrooke | Device for carrying observation and/or manipulation instruments |
| JPS54159964A (en) | 1978-06-06 | 1979-12-18 | Shiroyama Kogyo Kk | Articulated arm type manipulator |
| JPS594266B2 (ja) | 1978-07-28 | 1984-01-28 | 元田電子工業株式会社 | 先端制御ロボツト |
| US4221997A (en) | 1978-12-18 | 1980-09-09 | Western Electric Company, Incorporated | Articulated robot arm and method of moving same |
| US4494417A (en) | 1979-03-16 | 1985-01-22 | Robotgruppen Hb | Flexible arm, particularly a robot arm |
| SE419421B (sv) | 1979-03-16 | 1981-08-03 | Ove Larson | Bojlig arm i synnerhet robotarm |
| JPS6041203Y2 (ja) | 1979-04-03 | 1985-12-14 | 富士写真光機株式会社 | 内視鏡の彎曲管部 |
| WO1980002499A1 (en) | 1979-05-21 | 1980-11-27 | American Cystoscope Makers Inc | Surgical instrument for an endoscope |
| US4259876A (en) | 1979-10-02 | 1981-04-07 | Belyanin Petr N | Mechanical arm |
| JPH0122641Y2 (ja) | 1979-10-20 | 1989-07-07 | ||
| US4445184A (en) | 1980-07-19 | 1984-04-24 | Shin Meiwa Industry Co., Ltd. | Articulated robot |
| JPS605432B2 (ja) | 1980-09-30 | 1985-02-12 | ファナック株式会社 | 工業用ロボット |
| NO148986C (no) | 1981-10-05 | 1984-01-25 | Ole Molaug | Anordning ved robotmanipulator |
| JPS58177283A (ja) | 1982-04-07 | 1983-10-17 | 株式会社岡村製作所 | 関節形ア−ムを備える産業用ロボツト |
| SE450285B (sv) | 1982-06-24 | 1987-06-15 | Asea Ab | Sekerhetsanordning vid manoverenhet for industrirobot |
| SE436848B (sv) | 1982-06-28 | 1985-01-28 | Asea Ab | Styrsystem for industrirobot |
| US4806066A (en) | 1982-11-01 | 1989-02-21 | Microbot, Inc. | Robotic arm |
| US4479914A (en) | 1982-11-01 | 1984-10-30 | Cashiers Plastics | Process and mold for molding foamed plastic articles |
| US4517963A (en) | 1983-01-04 | 1985-05-21 | Harold Unger | Image-erecting barrel rotator for articulated optical arm |
| US4475375A (en) | 1983-01-24 | 1984-10-09 | Hill Ernest W | Multi-flex tube bending mandrel |
| US4666366A (en) | 1983-02-14 | 1987-05-19 | Canon Kabushiki Kaisha | Articulated arm transfer device |
| US4900218A (en) | 1983-04-07 | 1990-02-13 | Sutherland Ivan E | Robot arm structure |
| US4564179A (en) | 1984-04-12 | 1986-01-14 | Hollingsworth Ashley J | Articulated support arm apparatus |
| JPS6119593A (ja) | 1984-07-04 | 1986-01-28 | フアナツク株式会社 | 内圧防爆ロボツトの安全装置 |
| US4600355A (en) | 1984-08-29 | 1986-07-15 | Cybot, Inc. | Modular robotics system with basic interchangeable parts |
| JPS61146482A (ja) | 1984-12-20 | 1986-07-04 | 工業技術院長 | 異構造異自由度バイラテラル・マスタスレイブ・マニピユレ−タの制御装置 |
| JPH055529Y2 (ja) | 1985-03-25 | 1993-02-15 | ||
| JPS62194093A (ja) * | 1986-02-19 | 1987-08-26 | 株式会社椿本チエイン | ケ−ブル等の可撓支持体 |
| JPS61249286A (ja) | 1985-04-27 | 1986-11-06 | フアナツク株式会社 | 産業用ロボツト |
| JPS61281305A (ja) | 1985-06-06 | 1986-12-11 | Toyota Motor Corp | 多関節ロボツト制御装置 |
| US4700693A (en) | 1985-12-09 | 1987-10-20 | Welch Allyn, Inc. | Endoscope steering section |
| JPS62192134A (ja) | 1986-02-17 | 1987-08-22 | オリンパス光学工業株式会社 | 内視鏡装置用湾曲部装置 |
| EP0239409A1 (en) | 1986-03-28 | 1987-09-30 | Life Technology Research Foundation | Robot for surgical operation |
| US5078140A (en) | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| JPS63196388A (ja) | 1987-02-06 | 1988-08-15 | 株式会社東芝 | 遠隔操作ロボツトの教示装置 |
| SE462645B (sv) | 1987-03-31 | 1990-08-06 | Asea Ab | Anordning vid industrirobotar avseende verktygsbyte |
| JPS63256387A (ja) | 1987-04-13 | 1988-10-24 | 三菱電機株式会社 | 産業用ロボツトの関節機構 |
| US4838859A (en) | 1987-05-19 | 1989-06-13 | Steve Strassmann | Steerable catheter |
| US4863133A (en) | 1987-05-26 | 1989-09-05 | Leonard Medical | Arm device for adjustable positioning of a medical instrument or the like |
| US4790294A (en) | 1987-07-28 | 1988-12-13 | Welch Allyn, Inc. | Ball-and-socket bead endoscope steering section |
| US4796607A (en) | 1987-07-28 | 1989-01-10 | Welch Allyn, Inc. | Endoscope steering section |
| IT1235460B (it) | 1987-07-31 | 1992-07-30 | Confida Spa | Endoscopio flessibile. |
| US4787369A (en) | 1987-08-14 | 1988-11-29 | Welch Allyn, Inc. | Force relieving, force limiting self-adjusting steering for borescope or endoscope |
| US4804897A (en) | 1987-08-19 | 1989-02-14 | Hewlett-Packard Company | Orientation-dependant robot controller |
| US4805477A (en) | 1987-10-22 | 1989-02-21 | Gmf Robotics Corporation | Multiple joint robot part |
| US4780045A (en) | 1987-11-09 | 1988-10-25 | Gmf Robotics Corporation | Robot with improved cable routing system |
| US5046375A (en) | 1988-04-21 | 1991-09-10 | Massachusetts Institute Of Technology | Compact cable transmission with cable differential |
| US4979949A (en) | 1988-04-26 | 1990-12-25 | The Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US5005558A (en) | 1988-05-16 | 1991-04-09 | Kabushiki Kaisha Toshiba | Endoscope |
| US5012169A (en) | 1988-07-20 | 1991-04-30 | Yokogawa Electric Corporation | Motor drive system |
| US4950116A (en) | 1988-08-18 | 1990-08-21 | Kabushiki Kaisha Toshiba | Manipulator controlling apparatus |
| DE3829603A1 (de) | 1988-09-01 | 1990-03-15 | Kontron Holding Ag | Ultraschallendoskopeinrichtung |
| US4947827A (en) | 1988-12-30 | 1990-08-14 | Opielab, Inc. | Flexible endoscope |
| US5037391A (en) | 1989-01-09 | 1991-08-06 | Pilot Cardiovascular Systems, Inc. | Steerable angioplasty device |
| US4998916A (en) | 1989-01-09 | 1991-03-12 | Hammerslag Julius G | Steerable medical device |
| US5108368A (en) | 1990-01-04 | 1992-04-28 | Pilot Cardiovascular System, Inc. | Steerable medical device |
| US5203772A (en) | 1989-01-09 | 1993-04-20 | Pilot Cardiovascular Systems, Inc. | Steerable medical device |
| US5064340A (en) | 1989-01-20 | 1991-11-12 | Genmark Automation | Precision arm mechanism |
| US4941457A (en) | 1989-08-17 | 1990-07-17 | Olympus Optical Co., Ltd. | Endoscope using an optical guide twisted on the tip side to have the visual field direction and curvature axis coincide with each other |
| US5201325A (en) | 1989-09-01 | 1993-04-13 | Andronic Devices Ltd. | Advanced surgical retractor |
| DE69029358T2 (de) | 1989-10-13 | 1997-06-12 | Machida Endoscope Co Ltd | Beugevorrichtung |
| JPH03128028A (ja) | 1989-10-13 | 1991-05-31 | Machida Seisakusho:Kk | 湾曲操作装置用アングル |
| US4949927A (en) | 1989-10-17 | 1990-08-21 | John Madocks | Articulable column |
| JP2938486B2 (ja) | 1989-12-28 | 1999-08-23 | 株式会社町田製作所 | 湾曲管およびその製造方法 |
| JPH03218723A (ja) | 1990-01-24 | 1991-09-26 | Toshiba Corp | 内視鏡 |
| US5195968A (en) | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| US5254088A (en) | 1990-02-02 | 1993-10-19 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5200679A (en) | 1990-02-22 | 1993-04-06 | Graham Douglas F | Artificial hand and digit therefor |
| JPH03264041A (ja) | 1990-03-14 | 1991-11-25 | Machida Endscope Co Ltd | 湾曲操作装置 |
| JP2852785B2 (ja) | 1990-03-14 | 1999-02-03 | 株式会社町田製作所 | 可撓管用アングル |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| JP2987452B2 (ja) | 1990-05-17 | 1999-12-06 | オリンパス光学工業株式会社 | 内視鏡 |
| US5193963A (en) | 1990-10-31 | 1993-03-16 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Force reflecting hand controller |
| US5044063A (en) | 1990-11-02 | 1991-09-03 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Robotic tool change mechanism |
| US5217453A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5217003A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5180276A (en) | 1991-04-18 | 1993-01-19 | Brooks Automation, Inc. | Articulated arm transfer device |
| US5251611A (en) | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| US5266875A (en) | 1991-05-23 | 1993-11-30 | Massachusetts Institute Of Technology | Telerobotic system |
| US5271381A (en) | 1991-11-18 | 1993-12-21 | Vision Sciences, Inc. | Vertebrae for a bending section of an endoscope |
| JP3583777B2 (ja) | 1992-01-21 | 2004-11-04 | エス・アール・アイ・インターナシヨナル | テレオペレータシステムとテレプレゼンス法 |
| US5257669A (en) | 1992-02-10 | 1993-11-02 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Climbing robot |
| US5327905A (en) | 1992-02-14 | 1994-07-12 | Boaz Avitall | Biplanar deflectable catheter for arrhythmogenic tissue ablation |
| US5297443A (en) | 1992-07-07 | 1994-03-29 | Wentz John D | Flexible positioning appendage |
| JPH0622905A (ja) * | 1992-07-10 | 1994-02-01 | Olympus Optical Co Ltd | 内視鏡湾曲装置 |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5337732A (en) | 1992-09-16 | 1994-08-16 | Cedars-Sinai Medical Center | Robotic endoscopy |
| US5318526A (en) | 1992-09-29 | 1994-06-07 | Neuro Navigational Corporation | Flexible endoscope with hypotube activating wire support |
| DE4305376C1 (de) | 1993-02-22 | 1994-09-29 | Wolf Gmbh Richard | Schaft für medizinische Instrumente |
| US5386741A (en) | 1993-06-07 | 1995-02-07 | Rennex; Brian G. | Robotic snake |
| JP3463700B2 (ja) | 1994-05-11 | 2003-11-05 | 株式会社安川電機 | 磁気カップリング装置 |
| JPH08243113A (ja) | 1995-03-14 | 1996-09-24 | Morita Tokyo Seisakusho:Kk | 磁気軸継ぎ手及び同継ぎ手を備えた歯科用電動ハンドピース |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5759151A (en) | 1995-06-07 | 1998-06-02 | Carnegie Mellon University | Flexible steerable device for conducting exploratory procedures |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US7169141B2 (en) | 1998-02-24 | 2007-01-30 | Hansen Medical, Inc. | Surgical instrument |
| US7789875B2 (en) | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US6246200B1 (en) | 1998-08-04 | 2001-06-12 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6852107B2 (en) | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| US6234958B1 (en) | 1998-11-30 | 2001-05-22 | Medical Access Systems, Llc | Medical device introduction system including medical introducer having a plurality of access ports and methods of performing medical procedures with same |
| US20040044350A1 (en) | 1999-04-09 | 2004-03-04 | Evalve, Inc. | Steerable access sheath and methods of use |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US6450948B1 (en) | 1999-11-02 | 2002-09-17 | Vista Medical Technologies, Inc. | Deflecting tip for surgical cannula |
| US6440061B1 (en) | 2000-03-24 | 2002-08-27 | Donald E. Wenner | Laparoscopic instrument system for real-time biliary exploration and stone removal |
| US8888688B2 (en) | 2000-04-03 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Connector device for a controllable instrument |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6610007B2 (en) | 2000-04-03 | 2003-08-26 | Neoguide Systems, Inc. | Steerable segmented endoscope and method of insertion |
| US6743239B1 (en) | 2000-05-25 | 2004-06-01 | St. Jude Medical, Inc. | Devices with a bendable tip for medical procedures |
| EP1309277B1 (en) | 2000-07-20 | 2008-05-28 | Kinetic Surgical, LLC | Hand-actuated articulating surgical tool |
| US6916306B1 (en) | 2000-11-10 | 2005-07-12 | Boston Scientific Scimed, Inc. | Steerable loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| AU2002248360A1 (en) | 2001-01-16 | 2002-08-19 | Microdexterity Systems, Inc. | Surgical manipulator |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US6837847B2 (en) | 2002-06-13 | 2005-01-04 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| JP2007511247A (ja) | 2003-05-19 | 2007-05-10 | ユーエスジーアイ メディカル, インコーポレイテッド | 管腔ツール展開システム |
| US7344543B2 (en) | 2003-07-01 | 2008-03-18 | Medtronic, Inc. | Method and apparatus for epicardial left atrial appendage isolation in patients with atrial fibrillation |
| US7974681B2 (en) | 2004-03-05 | 2011-07-05 | Hansen Medical, Inc. | Robotic catheter system |
| EP1737335B1 (en) | 2004-03-23 | 2013-05-15 | Boston Scientific Limited | In-vivo visualization system |
| EP2446803A1 (en) | 2004-06-25 | 2012-05-02 | Carnegie-Mellon University | Steerable, follow the leader device |
| US8075476B2 (en) | 2004-07-27 | 2011-12-13 | Intuitive Surgical Operations, Inc. | Cannula system and method of use |
| US8827899B2 (en) | 2004-09-24 | 2014-09-09 | Vivid Medical, Inc. | Disposable endoscopic access device and portable display |
| WO2007075989A2 (en) * | 2005-12-20 | 2007-07-05 | Orthodynamix Llc | Method and devices for minimally invasive arthroscopic procedures |
| EP1815949A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| US8518024B2 (en) | 2006-04-24 | 2013-08-27 | Transenterix, Inc. | System and method for multi-instrument surgical access using a single access port |
| US8105350B2 (en) * | 2006-05-23 | 2012-01-31 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| WO2007134461A1 (en) * | 2006-05-24 | 2007-11-29 | Titan Medical Inc. | Snaking robotic arm with movable shapers |
| WO2007146842A2 (en) * | 2006-06-08 | 2007-12-21 | Surgical Solutions Llc | Medical device with articulating shaft |
| BRPI0714489B8 (pt) * | 2006-08-14 | 2021-06-22 | Cardiorobotics Inc | dispositivo multiarticulado dirigível |
| US7946546B2 (en) | 2006-10-20 | 2011-05-24 | Carnegie Mellon University | Apparatus for positioning a device |
| CA2667576C (en) | 2006-10-24 | 2013-10-22 | Cardiorobotics, Inc. | Steerable multi-linked device having a modular link assembly |
| US8025670B2 (en) | 2006-11-22 | 2011-09-27 | Minos Medical | Methods and apparatus for natural orifice vaginal hysterectomy |
| US8715270B2 (en) | 2006-12-01 | 2014-05-06 | Boston Scientific Scimed, Inc. | Multi-part instrument systems and methods |
| US20080245173A1 (en) | 2007-02-27 | 2008-10-09 | Carnegie Mellon University | System for controlling the movement of a multi-linked device |
| US9155452B2 (en) * | 2007-04-27 | 2015-10-13 | Intuitive Surgical Operations, Inc. | Complex shape steerable tissue visualization and manipulation catheter |
| JP2009045428A (ja) | 2007-07-25 | 2009-03-05 | Terumo Corp | 操作機構、医療用マニピュレータ及び手術用ロボットシステム |
| US8105233B2 (en) | 2007-10-24 | 2012-01-31 | Tarek Ahmed Nabil Abou El Kheir | Endoscopic system and method for therapeutic applications and obtaining 3-dimensional human vision simulated imaging with real dynamic convergence |
| CA2721495C (en) * | 2008-04-14 | 2017-12-12 | Carnegie Mellon University | Articulated device with visualization system |
| US8945096B2 (en) | 2008-06-05 | 2015-02-03 | Carnegie Mellon University | Extendable articulated probe device |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| JP5384869B2 (ja) | 2008-07-24 | 2014-01-08 | オリンパスメディカルシステムズ株式会社 | 内視鏡処置システム |
| AU2009289450B2 (en) * | 2008-09-05 | 2015-05-07 | Carnegie Mellon University | Multi-linked endoscopic device with spherical distal assembly |
| KR100944412B1 (ko) | 2008-10-13 | 2010-02-25 | (주)미래컴퍼니 | 수술용 슬레이브 로봇 |
| KR101075363B1 (ko) | 2008-10-31 | 2011-10-19 | 정창욱 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| US8348834B2 (en) * | 2008-12-18 | 2013-01-08 | Ethicon Endo-Surgery, Inc. | Steerable surgical access devices and methods |
| US20100280320A1 (en) * | 2009-04-29 | 2010-11-04 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US20100280325A1 (en) * | 2009-04-30 | 2010-11-04 | Tamer Ibrahim | Retractors and surgical systems including the same |
| US20110009863A1 (en) * | 2009-07-10 | 2011-01-13 | Tyco Healthcare Group Lp | Shaft Constructions for Medical Devices with an Articulating Tip |
| JP5253676B2 (ja) | 2011-05-20 | 2013-07-31 | オリンパスメディカルシステムズ株式会社 | 内視鏡 |
| CN103764010B (zh) | 2012-08-14 | 2015-12-30 | 奥林巴斯株式会社 | 内窥镜 |
| WO2014129033A1 (ja) | 2013-02-25 | 2014-08-28 | 三菱電機株式会社 | 音声認識システムおよび音声認識装置 |
-
2012
- 2012-09-12 EP EP17205404.1A patent/EP3321042A1/en not_active Withdrawn
- 2012-09-12 CA CA2848041A patent/CA2848041A1/en not_active Abandoned
- 2012-09-12 BR BR112014005937A patent/BR112014005937A2/pt not_active Application Discontinuation
- 2012-09-12 KR KR1020147007008A patent/KR20140065418A/ko not_active Abandoned
- 2012-09-12 AU AU2012308731A patent/AU2012308731B2/en not_active Ceased
- 2012-09-12 CN CN201280055547.0A patent/CN104010773B/zh not_active Expired - Fee Related
- 2012-09-12 JP JP2014530749A patent/JP6395605B2/ja not_active Expired - Fee Related
- 2012-09-12 US US14/343,915 patent/US9757856B2/en not_active Expired - Fee Related
- 2012-09-12 IN IN2450CHN2014 patent/IN2014CN02450A/en unknown
- 2012-09-12 WO PCT/US2012/054802 patent/WO2013039999A2/en not_active Ceased
- 2012-09-12 EP EP12832524.8A patent/EP2755805B1/en not_active Not-in-force
-
2014
- 2014-03-05 IL IL231331A patent/IL231331B/en active IP Right Grant
-
2016
- 2016-03-08 US US15/064,043 patent/US9572628B2/en not_active Expired - Fee Related
-
2017
- 2017-06-19 AU AU2017204151A patent/AU2017204151A1/en not_active Abandoned
- 2017-08-23 US US15/684,268 patent/US20170368681A1/en not_active Abandoned
-
2018
- 2018-03-04 IL IL257851A patent/IL257851A/en unknown
- 2018-06-27 JP JP2018121557A patent/JP6564501B2/ja not_active Expired - Fee Related
-
2019
- 2019-06-12 AU AU2019204116A patent/AU2019204116A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013039999A3 (en) | 2013-06-27 |
| IL231331A0 (en) | 2014-04-30 |
| AU2012308731A1 (en) | 2014-04-24 |
| EP2755805B1 (en) | 2018-05-09 |
| US20170368681A1 (en) | 2017-12-28 |
| KR20140065418A (ko) | 2014-05-29 |
| US20160262840A1 (en) | 2016-09-15 |
| US20140371764A1 (en) | 2014-12-18 |
| EP2755805A4 (en) | 2015-07-08 |
| US9757856B2 (en) | 2017-09-12 |
| US9572628B2 (en) | 2017-02-21 |
| CN104010773B (zh) | 2017-01-18 |
| CA2848041A1 (en) | 2013-03-21 |
| CN104010773A (zh) | 2014-08-27 |
| EP2755805A2 (en) | 2014-07-23 |
| AU2017204151A1 (en) | 2017-07-13 |
| AU2019204116A1 (en) | 2019-07-04 |
| JP6395605B2 (ja) | 2018-09-26 |
| WO2013039999A2 (en) | 2013-03-21 |
| EP3321042A1 (en) | 2018-05-16 |
| BR112014005937A2 (pt) | 2017-04-04 |
| IN2014CN02450A (ja) | 2015-09-25 |
| AU2012308731B2 (en) | 2017-07-13 |
| IL257851A (en) | 2018-04-30 |
| IL231331B (en) | 2018-03-29 |
| JP2015502181A (ja) | 2015-01-22 |
| JP2018187408A (ja) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6564501B2 (ja) | アンチツイストリンク配置を有する高アーティキュレーテッドプローブ、その形成方法及び医療手順実行方法 | |
| US10238460B2 (en) | Highly articulated robotic probes and methods of production and use of such probes | |
| CN109688961B (zh) | 计算机辅助远程操作手术系统和方法 | |
| US8578810B2 (en) | Jointed link structures exhibiting preferential bending, and related methods | |
| CN101610710B (zh) | 多关节弯曲机构以及具备多关节弯曲机构的多关节医疗器械 | |
| US20190039241A1 (en) | Robotic Surgery System, Method, and Apparatus | |
| CN108366837A (zh) | 用于机器人手术的手术工具以及机器人手术组件 | |
| US20240389987A1 (en) | Force transfer mechanism | |
| US20230310807A1 (en) | Instrument with a counter-pivoting mechanism | |
| Liu et al. | Development of a dexterous manipulator for single port access surgery | |
| US12329401B2 (en) | Instrument shafts with relief features, and related devices, systems, and methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190611 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190726 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6564501 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |