JP6506834B2 - 車両制御 - Google Patents
車両制御 Download PDFInfo
- Publication number
- JP6506834B2 JP6506834B2 JP2017506679A JP2017506679A JP6506834B2 JP 6506834 B2 JP6506834 B2 JP 6506834B2 JP 2017506679 A JP2017506679 A JP 2017506679A JP 2017506679 A JP2017506679 A JP 2017506679A JP 6506834 B2 JP6506834 B2 JP 6506834B2
- Authority
- JP
- Japan
- Prior art keywords
- pedestrian
- vehicle
- road
- processor
- user input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004590 computer program Methods 0.000 claims description 41
- 230000033001 locomotion Effects 0.000 claims description 41
- 238000000034 method Methods 0.000 claims description 29
- 230000007246 mechanism Effects 0.000 description 12
- 230000001413 cellular effect Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 230000004044 response Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000011664 signaling Effects 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 230000004807 localization Effects 0.000 description 2
- 230000000644 propagated effect Effects 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/005—Traffic control systems for road vehicles including pedestrian guidance indicator
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Radar, Positioning & Navigation (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Business, Economics & Management (AREA)
- Aviation & Aerospace Engineering (AREA)
- Health & Medical Sciences (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Traffic Control Systems (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- User Interface Of Digital Computer (AREA)
Description
図1Aは、チップまたはチップセットとすることが可能な装置10を示す。装置10は、図1Bに示されたような、ウェアラブルユーザ入力デバイスの部分を形成することが可能である。
図2Aは、チップまたはチップセットとすることが可能な装置100を示す。装置100は、例えば図2Bに示されるような、携帯電子デバイスの部分を形成することが可能である。
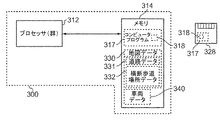
図3Aは、チップまたはチップセットとすることが可能な装置300を示す。装置300は、自律車両および/または半自律車両を制御するためのサーバの部分を形成することが可能である。
図4Aは、チップまたはチップセットとすることが可能な装置500を示す。装置500は、図4Bに示されたような、自律または半自律車両に対する車両制御システムの部分を形成することが可能である。
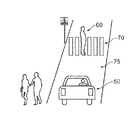
図5と関連させて、本発明の諸実施形態による第一方法を以下に説明することとする。この第一方法は、ウェアラブルユーザ入力デバイス20を着用している歩行者が道路を横断したいと望む状況に関する。
本発明の諸実施形態による第二方法を、図6〜12に関連させて以下に説明することにする。
図13は、第二方法において前述した実施形態とは、携帯デバイス200とネットワーク/サーバ400との間でのいかなる通信も不必要である点で、異なる本発明の実施形態を示す。代わりに、この携帯デバイス200は車両50と直接に通信する。例えば、携帯デバイス200のプロセッサ112は、歩行者60の付近内の全ての車両に送信される無線周波数信号/ビーコン707を送信するために、携帯デバイス200の1つ以上の無線周波数トランシーバ121を制御することが可能である。ビーコン707は、次いでそれらの車両の車両制御システム600において処理される。例えば、各車両制御システム600中のプロセッサ512は、それが中に配置された車両が、歩行者60が所定の経過時間内横断したいと望んでいる横断歩道70を横切る予定であるかどうかを判定し、予定であれば、プロセッサ512は、歩行者が道路を横断できるようにするため、当該車両の動きを変更することができる。次いで、車両制御システム600のプロセッサ512は、歩行者が道路を横断するのが安全なことを示すビーコン/信号708を携帯デバイス200に送信するため、車両制御システム600の1つ以上の無線周波数トランシーバ521を制御することが可能である。
「コンピュータ可読ストレージ媒体」、「コンピュータ」、「プロセッサ」などへの言及は、シングル/マルチプロセッサアーキテクチャ、およびシーケンシャル(フォンノイマン)/並列アーキテクチャなど、各種のアーキテクチャを有するコンピュータだけでなく、フィールドプログラマブルゲートアレイ(FPGA:field−programmable gate array)、特殊用途向け回路(ASIC:application specific circuit)、信号処理デバイス、および他の処理回路などの特殊回路も包含すると理解すべきである。コンピュータプログラム、命令、コードなどへの言及は、例えば、プロセッサのための命令かどうかを問わずハードウェアデバイスのためのプログラム可能コンテンツ、または、固定機能デバイス、ゲートアレイもしくはプログラム可能ロジックデバイスに対する構成設定など、プログラム可能処理装置またはファームウェアのためのソフトウェアを包含すると理解すべきである。
(a)ハードウェアだけの回路実装(例えば、アナログおよび/またはデジタル回路だけでの実装など)、および
(b)例えば(適用される場合):(i)プロセッサ(群)の組み合せ、または(ii)協働して、携帯電話またはサーバなどの装置に様々な機能を遂行させる、(デジタル信号プロセッサ(群)を含む)プロセッサ(群)/ソフトウェアの部分、ソフトウェア、およびメモリ(群)、および
(c)当該ソフトウェアまたはファームウェアがたとえ物理的に存在しない場合にあっても、動作のためにソフトウェアまたはファームウェアを必要とする、例えばマイクロプロセッサ(群)またはマイクロプロセッサ(群)の部分などの回路。
Claims (11)
- 歩行者のデバイスにより送信され、道路を横断する要求を備えた信号に対し、前記歩行者が前記道路を横断できるようにするため、自律型または半自律型の車両の動きを制御することによって応答する手段を備える装置であって、前記制御することは、前記車両を異なる経路に沿って再方向付けすることを含む、装置。
- 少なくとも1つのプロセッサ及び少なくとも1つのメモリを備える車両制御システムを更に備え、前記少なくとも1つのプロセッサは前記少なくとも1つのメモリに対して読み取り及び書き込みを行うように構成される、請求項1に記載の装置。
- 前記信号は、
前記歩行者の前記デバイスから直接送信された信号であるか、
前記歩行者の前記デバイスから直接送信され、1つ又は他の装置に受信されて転送された信号である、請求項1または2に記載の装置。 - 前記車両が、前記車両を運転するいかなる人間ドライバーも前記車両の内外に配置せずに、自律的に走行、操縦、加速、および減速をするよう構成された自律車両である、請求項1から3のいずれかに記載の装置。
- 前記道路を横断するのが安全であることの表示を、前記デバイスによって前記歩行者に提供させるために、前記デバイスに向け信号を、前記車両から送信させる手段を更に備える、請求項1から4のいずれかに記載の装置。
- 前記歩行者の位置を判定する手段と、
前記判定された位置に少なくとも部分的に基づいて前記車両の動きを制御する手段と、
をさらに備える、請求項1から5のいずれかに記載の装置。 - 前記判定された位置に基づいて前記歩行者に対する1つ以上の通り道候補を判断する手段と、
前記判断された前記歩行者に対する1つ以上の通り道候補に少なくとも部分的に基づいて前記車両の動きを制御する手段と、
をさらに備え、ここで前記通り道候補は、道路を横断する通り道候補である、請求項6に記載の装置。 - 前記歩行者の前記判定された位置を横断歩道場所データに関連付ける手段をさらに備え、前記1つ以上の通り道候補は前記横断歩道場所データを用いて判断される、請求項7に記載の装置。
- 前記デバイスがユーザに装着可能であり、前記ユーザの入力が、前記デバイスの少なくとも1つの動きセンサによって検出されるジェスチャ入力である、請求項1から8のいずれかに記載の装置。
- 歩行者のデバイスにより送信され、道路を横断する要求を備えた信号に対し、前記歩行者が前記道路を横断できるようにするため、自律型または半自律型の車両の動きを制御することによって応答することを含む方法であって、前記制御することは、前記車両を異なる経路に沿って再方向付けすることを含む、方法。
- 装置が備える少なくとも1つのプロセッサによって実行されると、前記装置に、
歩行者のデバイスにより送信され、道路を横断する要求を備えた信号に対し、前記歩行者が前記道路を横断できるようにするため、自律型または半自律型の車両の動きを制御することによって応答することを含む方法であって、前記制御することは、前記車両を異なる経路に沿って再方向付けすること、
を少なくとも遂行させるプログラムコードを備える、コンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14180330.4 | 2014-08-08 | ||
| EP14180330.4A EP2982562A1 (en) | 2014-08-08 | 2014-08-08 | Vehicle control |
| PCT/EP2015/067987 WO2016020400A2 (en) | 2014-08-08 | 2015-08-04 | Vehicle control |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017533485A JP2017533485A (ja) | 2017-11-09 |
| JP6506834B2 true JP6506834B2 (ja) | 2019-04-24 |
Family
ID=51359271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017506679A Active JP6506834B2 (ja) | 2014-08-08 | 2015-08-04 | 車両制御 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11194329B2 (ja) |
| EP (2) | EP2982562A1 (ja) |
| JP (1) | JP6506834B2 (ja) |
| CN (1) | CN106922198A (ja) |
| PH (1) | PH12017500232A1 (ja) |
| WO (1) | WO2016020400A2 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10377374B1 (en) * | 2013-11-06 | 2019-08-13 | Waymo Llc | Detection of pedestrian using radio devices |
| JP6671033B2 (ja) * | 2016-03-29 | 2020-03-25 | パナソニックIpマネジメント株式会社 | 車両状況判定装置、車両状況判定方法、および車両状況判定プログラム |
| US10309792B2 (en) | 2016-06-14 | 2019-06-04 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US10126136B2 (en) | 2016-06-14 | 2018-11-13 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US11092446B2 (en) | 2016-06-14 | 2021-08-17 | Motional Ad Llc | Route planning for an autonomous vehicle |
| US10829116B2 (en) | 2016-07-01 | 2020-11-10 | nuTonomy Inc. | Affecting functions of a vehicle based on function-related information about its environment |
| US10244094B2 (en) | 2016-08-18 | 2019-03-26 | nuTonomy Inc. | Hailing a vehicle |
| CN115204577A (zh) * | 2016-08-18 | 2022-10-18 | 动态Ad有限责任公司 | 用于招呼车辆的系统、方法及存储介质 |
| US10331129B2 (en) | 2016-10-20 | 2019-06-25 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10857994B2 (en) | 2016-10-20 | 2020-12-08 | Motional Ad Llc | Identifying a stopping place for an autonomous vehicle |
| US10473470B2 (en) | 2016-10-20 | 2019-11-12 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10681513B2 (en) | 2016-10-20 | 2020-06-09 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| JP6862257B6 (ja) * | 2017-04-14 | 2021-06-23 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 自動運転車両、自動運転車両の停車方法及びプログラム |
| AU2018307660B2 (en) * | 2017-07-28 | 2022-07-14 | Crown Equipment Corporation | Traffic management for materials handling vehicles in a warehouse environment |
| JP6496783B2 (ja) * | 2017-08-03 | 2019-04-03 | 京セラ株式会社 | ウェアラブル端末及び制御プログラム |
| KR101806470B1 (ko) * | 2017-09-21 | 2018-01-10 | (주)패스넷 | 비콘신호를 이용한 보행자 보호 시스템 |
| DE102017221045A1 (de) * | 2017-11-24 | 2019-05-29 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bereitstellen einer Warnmeldung mittels einer Sichtfeld-Anzeigeeinheit für ein Fahrzeug |
| US20210035438A1 (en) * | 2018-02-09 | 2021-02-04 | Ford Global Technologies, Llc | Pedestrian management systems and methods |
| US10909842B2 (en) * | 2018-06-25 | 2021-02-02 | Intel Corporation | Use of self-driving vehicles and mapping for pedestrian defined crosswalks |
| US10909866B2 (en) * | 2018-07-20 | 2021-02-02 | Cybernet Systems Corp. | Autonomous transportation system and methods |
| US11188094B2 (en) * | 2019-04-30 | 2021-11-30 | At&T Intellectual Property I, L.P. | Autonomous vehicle signaling system |
| US20210280054A1 (en) * | 2020-03-03 | 2021-09-09 | Carnegie Mellon University | System and method implementing virtual pedestrian traffic lights |
| KR102568277B1 (ko) * | 2021-02-03 | 2023-08-22 | 한양대학교 에리카산학협력단 | 자율주행 차량의 구조 시스템 |
| KR102568283B1 (ko) * | 2021-02-09 | 2023-08-21 | 한양대학교 에리카산학협력단 | 자율주행 차량의 보행자 커뮤니케이션 시스템 |
| US12071139B2 (en) | 2021-06-28 | 2024-08-27 | Allstate Insurance Company | Driver passenger detection using ultrasonic sensing |
| US11398149B1 (en) * | 2021-06-28 | 2022-07-26 | Arity International Limited | Crosswalk detection using high-frequency transmitters |
| JP7505473B2 (ja) | 2021-11-18 | 2024-06-25 | トヨタ自動車株式会社 | 車両制御装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9373149B2 (en) * | 2006-03-17 | 2016-06-21 | Fatdoor, Inc. | Autonomous neighborhood vehicle commerce network and community |
| JP5023988B2 (ja) * | 2007-11-16 | 2012-09-12 | 日産自動車株式会社 | 情報通知システム、携帯端末装置、車載装置及び情報送信方法 |
| JP5322877B2 (ja) * | 2009-10-02 | 2013-10-23 | 本田技研工業株式会社 | 交通支援システム |
| US8253589B2 (en) * | 2009-10-20 | 2012-08-28 | GM Global Technology Operations LLC | Vehicle to entity communication |
| US8509982B2 (en) * | 2010-10-05 | 2013-08-13 | Google Inc. | Zone driving |
| JP2012098872A (ja) * | 2010-11-01 | 2012-05-24 | Toyota Motor Corp | 運転支援装置 |
| DE102011111899A1 (de) * | 2011-08-30 | 2013-02-28 | Gm Global Technology Operations, Llc | Detektionsvorrichtung und Verfahren zur Detektion eines Trägers eines Sende-/Empfangsgeräts, Kraftfahrzeug |
| JP2015072570A (ja) * | 2013-10-02 | 2015-04-16 | 本田技研工業株式会社 | 車両の制御装置 |
| US9554447B2 (en) * | 2013-11-12 | 2017-01-24 | Abl Ip Holding Llc | Head-wearable user interface device for lighting related operations |
| US9435652B2 (en) * | 2013-12-19 | 2016-09-06 | Novatel Wireless, Inc. | Dynamic routing intelligent vehicle enhancement system |
| US9349293B2 (en) * | 2014-02-07 | 2016-05-24 | Here Global B.V | Method and apparatus for providing vehicle synchronization to facilitate a crossing |
| US9142127B1 (en) * | 2014-04-29 | 2015-09-22 | Maxwell Consulting, LLC | Systems and methods for traffic guidance nodes and traffic navigating entities |
| US9475422B2 (en) * | 2014-05-22 | 2016-10-25 | Applied Invention, Llc | Communication between autonomous vehicle and external observers |
| US10073590B2 (en) * | 2014-09-02 | 2018-09-11 | Apple Inc. | Reduced size user interface |
-
2014
- 2014-08-08 EP EP14180330.4A patent/EP2982562A1/en not_active Withdrawn
-
2015
- 2015-08-04 JP JP2017506679A patent/JP6506834B2/ja active Active
- 2015-08-04 WO PCT/EP2015/067987 patent/WO2016020400A2/en active Application Filing
- 2015-08-04 US US15/501,546 patent/US11194329B2/en active Active
- 2015-08-04 EP EP15747472.7A patent/EP3177496B1/en active Active
- 2015-08-04 CN CN201580052288.XA patent/CN106922198A/zh active Pending
-
2017
- 2017-02-08 PH PH12017500232A patent/PH12017500232A1/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| EP3177496A2 (en) | 2017-06-14 |
| US20170227964A1 (en) | 2017-08-10 |
| WO2016020400A2 (en) | 2016-02-11 |
| JP2017533485A (ja) | 2017-11-09 |
| CN106922198A (zh) | 2017-07-04 |
| EP2982562A1 (en) | 2016-02-10 |
| PH12017500232A1 (en) | 2017-07-10 |
| EP3177496B1 (en) | 2020-07-08 |
| US11194329B2 (en) | 2021-12-07 |
| WO2016020400A3 (en) | 2016-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6506834B2 (ja) | 車両制御 | |
| US9746339B2 (en) | Apparatus, method, computer program and user device for enabling control of a vehicle | |
| JP2016151910A (ja) | 不審車両認識装置及び不審車両認識方法 | |
| US10609510B2 (en) | Mobile electronic apparatus, mobile electronic apparatus control method, a non-transitory computer readable recording medium, for providing warnings to a user of the apparatus based on the location of the electronic apparatus | |
| JP6760898B2 (ja) | 情報処理装置及び情報処理システム | |
| US10645535B2 (en) | Electronic apparatus, control device and computer-readable non-transitory recording medium for selectively transmitting information based on indoor/outdoor specification | |
| JP2019028542A (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| JP6849571B2 (ja) | 路側機、通信システム、及び路側機の送信方法 | |
| JP6293817B2 (ja) | 携帯電子機器、制御システム、携帯電子機器制御方法及び携帯電子機器制御プログラム | |
| US10575135B2 (en) | Portable electronic device, method of controlling portable electronic device, and non-transitory computer-readable medium | |
| JP6849572B2 (ja) | 路側機、電子機器、路側機の送信方法及び電子機器の動作方法 | |
| JP6833758B2 (ja) | 携帯電子機器、携帯電子機器制御方法及び携帯電子機器制御プログラム | |
| JP2019028533A (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| JP6605566B2 (ja) | 携帯電子機器、携帯電子機器制御方法及び携帯電子機器制御プログラム | |
| JP6560770B2 (ja) | 電子機器、制御システム及び電子機器の制御方法 | |
| WO2018038236A1 (ja) | 電子機器、制御プログラム及び電子機器の動作方法 | |
| WO2019022048A1 (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| JP2018033034A (ja) | 電子機器、制御方法、及び制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180327 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190329 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6506834 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |