WO2019022048A1 - 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 - Google Patents
情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 Download PDFInfo
- Publication number
- WO2019022048A1 WO2019022048A1 PCT/JP2018/027622 JP2018027622W WO2019022048A1 WO 2019022048 A1 WO2019022048 A1 WO 2019022048A1 JP 2018027622 W JP2018027622 W JP 2018027622W WO 2019022048 A1 WO2019022048 A1 WO 2019022048A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- road
- processing apparatus
- information processing
- portable electronic
- Prior art date
Links
Images



















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
Definitions
- the present disclosure relates to an information processing apparatus.
- An information processing device a management device, a portable electronic device, a control program, an operating method of the information processing device, an operating method of the portable electronic device, and a data structure are disclosed.
- the portable electronic device in the information processing device, is outside the portable electronic device based on the position information of the portable electronic device and the position information of a predetermined location on the roadway.
- the portable electronic device includes a first determination unit that determines, based on the road information, the predetermined place in the case of determining whether to perform notification.
- the management device is a management device that manages road information.
- the management device includes a storage unit storing road information, and an updating unit updating road information based on position information of a predetermined location determined by the information processing apparatus based on the road information.
- control program is a control program for controlling the operation of the information processing apparatus.
- the control unit program causes the information processing apparatus to use the portable electronic device outside the portable electronic device based on the position information of the portable electronic device and the position information of a predetermined location on the roadway. It is for performing the process of determining the said predetermined location in the case of determining whether an electronic device performs notification based on road information.
- the method of operating the information processing apparatus is such that the portable electronic device is based on the position information of the portable electronic device and the position information of a predetermined location on the roadway.
- the data structure includes position information of representative points of pedestrian crossings and position information of entrances of pedestrian crossings estimated based on position information of representative points, and manages road information
- the control unit of the managing apparatus updates the road information based on the position information of the representative point and the position information of the entrance.
- the information processing apparatus estimates an entry point that is highly likely to enter the road when a person crosses the road based on the position information of the portable electronic device and the road information. And an estimation unit.
- the management device is a management device that manages road information.
- the management device includes a storage unit that stores road information, and an update unit that updates road information based on an entry point estimated by the information processing device based on the road information.
- the information processing apparatus is an information processing apparatus capable of communicating with a plurality of portable electronic devices.
- the information processing apparatus includes an estimation unit that estimates a first approach point that is likely to enter the road when a person crosses the road.
- Each of the plurality of portable electronic devices identifies the second entry point when the user of the user crosses the road based on the location information of the user and the road information, and identifies location information of the identified second entry point Is sent to the information processing apparatus.
- the estimation unit estimates the first approach point based on the position information of the second approach point transmitted from each of the plurality of portable electronic devices.
- the portable electronic device is a portable electronic device included in a plurality of portable electronic devices that can communicate with the information processing device.
- control program is a control program for controlling the operation of the information processing apparatus.
- the control program causes the information processing apparatus to execute a process of estimating an entry point having a high possibility of entering the road when a person crosses the road based on the position information of the portable electronic device and the road information. It is for.
- control program is a control program for controlling the operation of an information processing apparatus capable of communicating with a plurality of portable electronic devices.
- Each of the plurality of portable electronic devices identifies the first entry point when the user of the user crosses the road, based on the location information of the user and the road information, and identifies location information of the first entry point identified Is sent to the information processing apparatus.
- the control program causes the information processing apparatus to be highly likely to enter the road when a person crosses the road based on the position information of the first entry point transmitted from each of the plurality of portable electronic devices. (2) It is for executing the step of estimating the entry point.
- control program causes a person to execute the roadway based on the position information of the first approach point when the user of the user crosses the roadway transmitted by each of the plurality of portable electronic devices.
- the control program is a control program for controlling a portable electronic device capable of communicating with an information processing apparatus that estimates a second approach point that is highly likely to enter the road when crossing the area.
- the control program includes, in the portable electronic device, a first step of identifying a first approach point based on position information of the portable electronic device and road information, and a position of the first approach point identified in the first step And a second step of transmitting information to the information processing apparatus.
- the operation method of the information processing apparatus is an approach in which a person is likely to enter the road when crossing the road based on the position information of the portable electronic device and the road information. There is a step of inferring points.
- the operation method of the information processing apparatus is an operation method of the information processing apparatus capable of communicating with a plurality of portable electronic devices.
- Each of the plurality of portable electronic devices identifies the first entry point when the user of the user crosses the road, based on the location information of the user and the road information, and identifies location information of the first entry point identified Is sent to the information processing apparatus.
- the operation method of the information processing apparatus is based on the position information of the first approach point transmitted from each of the plurality of portable electronic devices, the second is highly likely to enter the road when a person crosses the road. Estimating the ingress point.
- the method of operating the portable electronic device is based on the position information of the first approach point when the user of the user crosses the road, which each of the plurality of portable electronic devices transmits.
- the method is an operation method of a portable electronic device capable of communicating with an information processing apparatus that estimates a second approach point that is highly likely to enter the road when a person crosses the road.
- the operation method of the portable electronic device includes a first step of specifying a first approach point based on position information of the portable electronic device and road information, and position information of the first approach point specified in the first step. And a second step of transmitting the information processing apparatus to the information processing apparatus.
- the data structure is estimated based on the position information of the representative point of the roadway, the position information of the portable electronic device and the position information of the representative point, and when a person crosses the roadway
- the road information is included based on the position information of the representative point and the position information of the entry point. It is for updating.
- the information processing apparatus identifies a plurality of entry points when a person crosses the road based on the position information of the portable electronic device and the road information, and identifies the identified plurality of entry points. It comprises an estimation unit for estimating an approach line that is likely to approach the road when a person crosses the road based on the approach point.
- the management device is a management device that manages road information.
- the management device includes a storage unit that stores road information, and an update unit that updates road information based on an approach line estimated based on the road information by the information processing device.
- the information processing apparatus is an information processing apparatus capable of communicating with a plurality of portable electronic devices.
- the information processing apparatus includes an estimation unit that estimates an approach line that is likely to enter the road when a person crosses the road.
- Each of the plurality of portable electronic devices identifies the entry point when the user of the user crosses the road based on the location information of the user and the road information, and the location information of the identified entry point is information processing device Send to
- the estimation unit estimates an approach line based on position information of an approach point transmitted from each of the plurality of portable electronic devices.
- the portable electronic device is included in a plurality of portable electronic devices that can communicate with the above-described information processing apparatus.
- control program is a control program for controlling the operation of the information processing apparatus.
- the control program identifies, on the information processing apparatus, a plurality of entry points when a person crosses the road based on the position information of the portable electronic device and the road information, and based on the identified plurality of entry points.
- the method is for performing a process of estimating an approach line likely to enter the road when a person crosses the road.
- control program is a control program for controlling the operation of an information processing apparatus capable of communicating with a plurality of portable electronic devices.
- Each of the plurality of portable electronic devices identifies the entry point when the user of the user crosses the road based on the location information of the user and the road information, and the location information of the identified entry point is information processing device Send to
- the control program causes the information processing apparatus to have an approach line that is highly likely to enter the road when a person crosses the road based on the position information of the approach point transmitted from each of the plurality of portable electronic devices. It is for carrying out the step of guessing.
- the control program causes a person to cross the road based on the position information of the entry point when the own user crosses the road which each of the plurality of portable electronic devices transmits. It is a control program for controlling the portable electronic device which can communicate with the information processing apparatus which estimates an approach line with high possibility of entering the said roadway at the time of doing.
- the control program processes the portable electronic device, the first step of identifying the entry point based on the position information of the portable electronic device and the road information, and the position information of the entry point identified in the first step. It is for performing the 2nd process of transmitting to a device.
- the operation method of the information processing apparatus identifies and identifies a plurality of entry points when a person crosses the road based on the position information of the portable electronic device and the road information. Based on the plurality of entry points, there is provided a step of estimating an entry line likely to enter the road when a person crosses the road.
- the operation method of the information processing apparatus is an operation method of the information processing apparatus capable of communicating with a plurality of portable electronic devices.
- Each of the plurality of portable electronic devices identifies the entry point when the user of the user crosses the road based on the location information of the user and the road information, and the location information of the identified entry point is information processing device Send to
- the operation method of the information processing apparatus estimates an approach line having a high possibility of entering the road when a person crosses the road based on the position information of the approach point transmitted from each of the plurality of portable electronic devices Providing the step of
- the method of operating the portable electronic device is a method of transmitting information based on the position information of the point of entry when the user of the user crosses the road, transmitted by each of the plurality of portable electronic devices.
- An operation method of a portable electronic device capable of communicating with an information processing apparatus that estimates an approach line that is highly likely to enter the road when crossing the road.
- An operation method of a portable electronic device includes: a first step of identifying an approach point based on position information of the portable electronic device and road information; and position information of the approach point identified in the first step. And a second step of transmitting to the
- the data structure is specified based on the position information of the representative point of the roadway, the position information of the portable electronic device and the position information of the representative point, when a person crosses the roadway
- a management apparatus that manages road information, including specific information for identifying an approach line that is likely to enter the road when a person crosses the road, which is estimated based on a plurality of entry points of
- the control unit of the above is for causing the road information to be updated based on the position information of the representative point and the specific information.
- the information processing system 1 is, for example, a system used in Intelligent Transport Systems (ITS). Specifically, the information processing system 1 is a ITS safe driving support communication system.
- the safe driving support communication system is called a safe driving support system or a safe driving support wireless system.
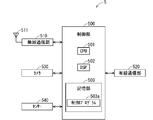
- the information processing system 1 includes a plurality of types of information processing devices.
- the plurality of types of information processing apparatuses include the portable electronic device 10, the roadside device 5, the electronic device mounted on the vehicle 6, and the server device 8.
- the portable electronic device 10 may be referred to as an “electrical device 10”.
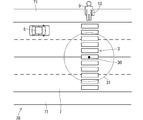
- a roadside device 5 disposed at an intersection 2 or the like, a vehicle 6 such as a car running on a road 7, and an electronic device 10 possessed by a user 9 who is a pedestrian, for example. Can communicate wirelessly with each other.
- the roadside device 5, the vehicle 6, and the electronic device 10 can exchange information with each other.
- the plurality of vehicles 6 can perform wireless communication with each other. Thereby, the plurality of vehicles 6 can exchange information with each other.
- Communication between the roadside device 5 and the vehicle 6, communication between the vehicle 6, communication between the roadside device 5 and the electronic device 10 of the pedestrian, and communication between the electronic device 10 of the pedestrian and the vehicle 6 are respectively It is called road-to-vehicle communication, vehicle-to-vehicle communication, road-to-walk communication, and walk-to-car communication.
- the electronic device 10, the roadside device 5, and the server device 8 are connected to the network 900.
- the network 900 includes, for example, a relay device and the Internet. Each of the electronic device 10 and the roadside device 5 can communicate with the server device 8 through the network 900.
- the electronic device 10 is, for example, a mobile phone such as a smartphone.
- the electronic device 10 can specify the state of the user 9.
- the electronic device 10 can notify the roadside device 5 and the vehicle 6 or the like of information related to the specified state of the user 9 or the like. The operation of the electronic device 10 will be described in detail later.
- the roadside device 5 can, for example, notify the vehicle 6 and the electronic device 10 of information on lighting of the traffic light 4 and information on road regulation.
- the roadside device 5 can detect a vehicle 6 and a pedestrian nearby.
- the roadside device 5 disposed at the intersection 2 can detect a pedestrian crossing the pedestrian crossing 3, for example.
- the roadside machine 5 can notify the vehicle 6 and the electronic device 10 of the information regarding the detected vehicle 6 and a pedestrian. Further, the roadside device 5 can notify the other vehicle 6 and the electronic device 10 of the information notified from the vehicle 6 and the electronic device 10.
- the vehicle 6 can notify the other vehicle 6, the roadside device 5 and the electronic device 10 of information on its own position, speed and blinker.
- the vehicle 6 can support the driver's safe driving by giving the driver various notifications such as a warning based on the information notified from the other device.
- the vehicle 6 can notify the driver of various types using a speaker, a display device, and the like.
- the vehicle 6 can perform various notifications to the driver using, for example, a car navigation device mounted on the vehicle 6.
- the server device 8 manages map information including road information and facility information.
- the server device 8 can transmit map information to the electronic device 10, the roadside device 5 and the vehicle 6.
- the electronic device 10 and the vehicle 6 receive the map information from the server device 8, for example, the electronic device 10 and the vehicle 6 can display a map or the like based on the received map information.
- the electronic device 10 and the vehicle 6 may receive the map information from the server device 8 via the roadside device 5.
- the safe driving of the driver of the vehicle 6 is supported by performing the road-vehicle communication, the inter-vehicle communication, the road-walk communication, and the walk-vehicle communication.
- a vehicle of an automobile is shown as the vehicle 6, but the vehicle 6 may be a vehicle other than an automobile.
- the vehicle 6 may be a bus car or a tram car.
- FIGS. 3 and 4 are a perspective view and a rear view showing an example of the appearance of the electronic device 10.
- the electronic device 10 includes a device case 11 having a substantially rectangular plate shape in a plan view.
- the device case 11 constitutes an exterior of the electronic device 10.
- a display area 12 in which various information such as characters, symbols, and figures are displayed is located on the front surface 11 a of the device case 11.
- a touch panel 130 described later is located on the back side of the display area 12.
- the user 9 can input various information to the electronic device 10 by operating the display area 12 on the front surface of the electronic device 10 with a finger or the like.
- the user 9 can also input various information to the electronic device 10 by operating the display area 12 with an operator other than a finger, for example, a touch panel pen such as a stylus pen.
- the receiver hole 13 is located at the upper end of the front surface 11 a of the device case 11.
- the speaker hole 14 is located at the lower end of the front surface 11a.
- a microphone hole 15 is located on the lower side surface 11 c of the device case 11.
- a lens 181 included in a first camera 180 described later is visible.
- a lens 191 included in a second camera 190 described later is visible.
- the electronic device 10 includes an operation button group 220 (see FIG. 5 described later) including a plurality of operation buttons 22.
- Each of the plurality of operation buttons 22 is a hardware button.
- each of the plurality of operation buttons 22 is a push button.
- at least one operation button 22 included in the operation button group 220 may be a software button displayed in the display area 12.
- the operation button group 220 includes operation buttons 22 a, 22 b and 22 c located at the lower end portion of the front surface 11 a of the device case 11.
- the operation button group 220 may also include a power button and a volume button located on the surface of the device case 11.
- the operation button 22a is, for example, a back button.
- the back button is an operation button for switching the display of the display area 12 to the previous display.
- the operation button 22 b is, for example, a home button.
- the home button is an operation button for displaying a home screen on the display area 12.
- the home screen is displayed on the display area 12 by the user 9 operating the operation button 22 b.
- the operation button 22c is, for example, a history button.
- the history button is an operation button for displaying the history of the application executed by the electronic device 10 on the display area 12.
- the display area 12 displays the history of the application executed by the electronic device 10.
- FIG. 5 is a block diagram mainly showing an example of the electrical configuration of the electronic device 10.
- the electronic device 10 includes a control unit 100, a wireless communication unit 110, a display unit 120, an operation unit 210, and a satellite signal reception unit 140.
- the electronic device 10 further includes a receiver 150, a speaker 160, a microphone 170, a first camera 180, a second camera 190, an acceleration sensor 200, and a battery 230. These components included in the electronic device 10 are housed in the device case 11.
- the control unit 100 can centrally manage the operation of the electronic device 10 by controlling other components of the electronic device 10.
- the controller 100 includes at least one processor to provide control and processing capabilities to perform various functions, as described in further detail below.
- the at least one processor may also be implemented as a single integrated circuit (IC) or as a plurality of communicatively coupled integrated circuits IC and / or discrete circuits. Good.
- the at least one processor can be implemented in accordance with various known techniques.
- a processor includes one or more circuits or units configured to perform one or more data calculation procedures or processes, for example, by executing instructions stored in an associated memory.
- the processor may be firmware (eg, discrete logic components) configured to perform one or more data calculation procedures or processes.
- the processor may be one or more processors, controllers, microprocessors, microcontrollers, application specific integrated circuits (ASICs), digital signal processors, programmable logic devices, field programmable gate arrays, or the like. Any combination of devices or configurations, or other known devices and configurations, may be included to perform the functions described below.
- ASICs application specific integrated circuits
- digital signal processors programmable logic devices, field programmable gate arrays, or the like. Any combination of devices or configurations, or other known devices and configurations, may be included to perform the functions described below.
- the control unit 100 includes a central processing unit (CPU) 101, a digital signal processor (DSP) 102, and a storage unit 103.
- the storage unit 103 includes a non-temporary recording medium readable by the CPU 101 and the DSP 102, such as a read only memory (ROM) and a random access memory (RAM).
- the ROM of the storage unit 103 is, for example, a flash ROM (flash memory) which is a non-volatile memory.
- the storage unit 103 stores a plurality of control programs 103 a and the like for controlling the electronic device 10.
- the various functions of the control unit 100 are realized by the CPU 101 and the DSP 102 executing various control programs 103 a in the storage unit 103.
- the control unit 100 may include a plurality of CPUs 101.
- the control unit 100 may not include the DSP 102, or may include a plurality of DSPs 102. Further, all the functions of the control unit 100 or a part of the functions of the control unit 100 may be realized by a hardware circuit that does not require software for the realization of the functions.
- the storage unit 103 may include a non-transitory storage medium readable by a computer, other than the ROM and the RAM.
- the storage unit 103 may include, for example, a small hard disk drive and an SSD (Solid State Drive).
- the plurality of control programs 103 a in the storage unit 103 include various applications (application programs).
- the storage unit 103 stores, for example, a call application for voice and video calls, a browser for displaying a website, and a mail application for creating, browsing, and transmitting / receiving an e-mail.
- the storage unit 103 also includes a camera application for shooting an object using the first camera 180 and the second camera 190, and a recorded image display application for displaying still images and moving images recorded in the storage unit 103.
- a music playback control application for controlling playback of music data stored in the storage unit 103 is stored.
- At least one application in the storage unit 103 may be stored in advance in the storage unit 103. Further, at least one application in the storage unit 103 may be one downloaded by the electronic device 10 from another device and stored in the storage unit 103.
- the wireless communication unit 110 has an antenna 111. It can be said that the wireless communication unit 110 is a wireless communication circuit.
- the wireless communication unit 110 can wirelessly communicate, for example, with a plurality of communication methods using the antenna 111.
- the wireless communication of the wireless communication unit 110 is controlled by the control unit 100.
- the wireless communication unit 110 can wirelessly communicate with a base station of a mobile phone system.
- the wireless communication unit 110 can communicate with an information processing apparatus other than the electronic device 10, for example, the server device 8, a cellular phone, a web server, and the like through the network 900 including the base station.
- the electronic device 10 can perform data communication, voice call, video call, and the like with other mobile phones and the like.
- the wireless communication unit 110 can wirelessly communicate with the roadside device 5 and the vehicle 6.
- the wireless communication unit 110 can perform wireless communication using the 700 MHz band assigned to the ITS.
- the wireless communication unit 110 can perform communication in compliance with the IEEE 802.11p wireless standard used in the ITS.
- the wireless communication unit 110 can perform wireless communication using a wireless LAN (Local Area Network) such as Wifi.
- the wireless communication unit 110 can perform near field communication.
- the wireless communication unit 110 can perform wireless communication in accordance with Bluetooth (registered trademark).
- the wireless communication unit 110 may be capable of wireless communication in accordance with at least one of ZigBee (registered trademark) and NFC (Near Field Communication).
- the wireless communication unit 110 performs various processes such as amplification on the signal received by the antenna 111, and outputs the processed received signal to the control unit 100.
- the control unit 100 performs various processes on the received signal to be input, and acquires information included in the received signal. Further, the control unit 100 outputs a transmission signal including information to the wireless communication unit 110.
- the wireless communication unit 110 performs various processing such as amplification processing on the input transmission signal, and wirelessly transmits the processed transmission signal from the antenna 111.
- the display unit 120 includes a display area 12 located on the front of the electronic device 10 and a display panel 121.
- the display unit 120 can display various information in the display area 12.
- the display panel 121 is, for example, a liquid crystal display panel or an organic EL panel.
- the display panel 121 can display various kinds of information such as characters, symbols, and figures under the control of the control unit 100.
- the display panel 121 faces the display area 12 in the device case 11. The information displayed on the display panel 121 is displayed on the display area 12.
- the operation unit 210 can receive various operations of the user 9 on the electronic device 10.
- the operation unit 210 includes the touch panel 130 and the operation button group 220.
- the touch panel 130 can detect an operation on the display area 12 by an operator such as a finger. Thereby, the touch panel 130 can receive an operation on the display area 12 of the user 9.
- the touch panel 130 is, for example, a projected capacitive touch panel.
- the touch panel 130 is located, for example, on the back side of the display area 12.
- the control unit 100 can specify the content of the operation performed on the display area 12 based on the electrical signal (output signal) from the touch panel 130. Then, the control unit 100 can perform processing according to the specified operation content.
- each operation button 22 of the operation button group 220 can output an operation signal indicating that the operation has been performed to the control unit 100.
- the control unit 100 can determine, for each operation button 22, whether the operation button 22 is operated.
- the control unit 100 to which the operation signal is input controls the other components, whereby the electronic device 10 executes the function assigned to the operated operation button 22.
- the satellite signal reception unit 140 can receive satellite signals transmitted by positioning satellites. Then, the satellite signal receiving unit 140 can acquire position information indicating the position of the electronic device 10 based on the received satellite signal.
- the position information acquired by the satellite signal reception unit 140 includes, for example, latitude and longitude indicating the position of the electronic device 10.
- the control unit 100 can operate the satellite signal receiving unit 140 or stop its operation.
- the satellite signal receiving unit 140 may be simply referred to as the “receiving unit 140”.
- the receiver 140 is, for example, a GPS receiver, and can receive a wireless signal from a positioning satellite of GPS (Global Positioning System).
- the receiving unit 140 calculates, for example, the latitude and longitude of the current position of the electronic device 10 based on the received wireless signal, and outputs position information including the calculated latitude and longitude to the control unit 100.
- the position information of the electronic device 10 can be said to be position information indicating the position of the user 9 who holds the electronic device 10.
- the receiving unit 140 may obtain position information of the electronic device 10 based on signals from positioning satellites of Global Navigation Satellite System (GNSS) other than GPS.
- GNSS Global Navigation Satellite System
- the receiving unit 140 is based on signals from positioning satellites of Global Navigation Satellite System (GLONASS), Indian Regional Navigational Satellite System (IRNSS), COMPASS, Galileo, or Quasi-Zenith Satellites System (QZSS).
- the position information of the electronic device 10 may be determined.
- the microphone 170 can convert a sound input from the outside of the electronic device 10 into an electrical sound signal and output it to the control unit 100. Sound from the outside of the electronic device 10 is taken into the inside of the electronic device 10 from the microphone hole 15 and input to the microphone 170.
- the speaker 160 is, for example, a dynamic speaker.
- the speaker 160 can convert the electrical sound signal from the control unit 100 into sound and output it.
- the sound output from the speaker 160 is output from the speaker hole 14 to the outside.
- the user 9 can hear the sound output from the speaker hole 14 even at a place away from the electronic device 10.
- the receiver 150 can output a reception sound.
- the receiver 150 is, for example, a dynamic speaker.
- the receiver 150 can convert the electrical sound signal from the control unit 100 into sound and output it.
- the sound output from the receiver 150 is output from the receiver hole 13 to the outside.
- the volume of the sound output from the receiver hole 13 is smaller than the volume of the sound output from the speaker hole 14.
- the user 9 can hear the sound output from the receiver hole 13 by bringing the receiver hole 13 close to the ear.
- a vibration element such as a piezoelectric vibration element may be provided to vibrate the front surface portion of the device case 11. In this case, the sound is transmitted to the user by the vibration of the front portion.
- the first camera 180 includes a lens 181, an image sensor, and the like.
- the second camera 190 includes a lens 191, an image sensor, and the like. Each of the first camera 180 and the second camera 190 can capture an object under the control of the control unit 100, generate a still image or a moving image showing the imaged object, and output it to the control unit 100. .
- the lens 181 of the first camera 180 is visible from the front surface 11 a of the device case 11. Therefore, the first camera 180 can capture an object present on the front side (the display area 12 side) of the electronic device 10.
- the first camera 180 is called an in-camera.
- the lens 191 of the second camera 190 is visible from the back surface 11 b of the device case 11. Therefore, the second camera 190 can capture an object present on the back side of the electronic device 10.
- the second camera 190 is called an out camera.
- the acceleration sensor 200 can detect the acceleration of the electronic device 10.
- the acceleration sensor 200 is, for example, a three-axis acceleration sensor.
- the acceleration sensor 200 can detect the acceleration of the electronic device 10 in the x-axis direction, the y-axis direction, and the z-axis direction.
- the x-axis direction, the y-axis direction, and the z-axis direction are respectively set, for example, in the longitudinal direction, the latitudinal direction, and the thickness direction of the electronic device 10.
- the battery 230 can output the power of the electronic device 10.
- the battery 230 is, for example, a rechargeable battery.
- the power output from the battery 230 is supplied to various configurations such as the control unit 100 and the wireless communication unit 110 provided in the electronic device 10.
- the electronic device 10 may not include the acceleration sensor 200. In this case, the electronic device 10 may be connected wirelessly or by wire to a separate acceleration sensor.
- the electronic device 10 may also include a sensor other than the acceleration sensor 200.
- the electronic device 10 may include at least one of an air pressure sensor, a geomagnetic sensor, a temperature sensor, a proximity sensor, an illuminance sensor, and a gyro sensor.
- the electronic device 10 may be connected wirelessly or by wire to a separate sensor other than the acceleration sensor 200.
- the electronic device 10 may not include the receiving unit 140. In this case, the electronic device 10 may be connected wirelessly or by wire to a separate reception unit 140.
- FIG. 6 is a block diagram showing an example of the configuration of the roadside device 5.
- the roadside device 5 includes a control unit 500, a wireless communication unit 510, a wired communication unit 520, a camera 530, and a sensor 540.
- the control unit 500 can centrally manage the operation of the roadside device 5 by controlling other components of the roadside device 5.
- Control unit 500 includes at least one processor to provide control and processing capabilities to perform various functions, as described in further detail below.
- the above description of the processor included in the control unit 100 of the electronic device 10 is also applicable to the processor included in the control unit 500.
- the control unit 500 includes a CPU 501, a DSP 502, and a storage unit 503.
- the storage unit 503 includes a non-transitory recording medium readable by the CPU 501 and the DSP 502, such as a ROM and a RAM.
- the ROM of the storage unit 503 is, for example, a flash ROM which is a non-volatile memory.
- the storage unit 503 stores a plurality of control programs 503 a and the like for controlling the roadside device 5.
- the various functions of the control unit 500 are realized by the CPU 501 and the DSP 502 executing various control programs 503 a in the storage unit 503.
- the storage unit 503 may include a non-transitory storage medium readable by a computer other than the ROM and the RAM. At least one control program 503 a in the storage unit 503 may be stored in advance in the storage unit 503. In addition, at least one control program 503 a in the storage unit 503 may be downloaded by the roadside device 5 from another device and stored in the storage unit 503. Further, all the functions of the control unit 500 or a part of the functions of the control unit 500 may be realized by a hardware circuit that does not require software for realizing the functions.
- the wireless communication unit 510 has an antenna 511.
- the wireless communication unit 510 can wirelessly communicate with the vehicle 6 (specifically, the electronic device in the vehicle 6) and the electronic device 10 using the antenna 511.
- the wireless communication unit 510 can perform wireless communication using, for example, the 700 MHz band assigned to the ITS.
- the wireless communication unit 510 may communicate in compliance with the IEEE 802.11p wireless standard used in the ITS.
- the wireless communication unit 510 performs various processing such as amplification processing on the signal received by the antenna 511, and outputs the processed reception signal to the control unit 500.
- the control unit 500 performs various processes on the received signal to be input, and acquires information included in the received signal.
- the control unit 500 outputs a transmission signal including information to the wireless communication unit 510.
- the wireless communication unit 510 performs various processes such as amplification on the input transmission signal, and wirelessly transmits the processed transmission signal from the antenna 511.
- the wireless communication unit 510 may be capable of performing wireless communication with the vehicle 6 and the electronic device 10 using a wireless LAN (Local Area Network) such as Wifi.
- a wireless LAN Local Area Network
- the wired communication unit 520 is connected to the network 900 by wire.
- the wired communication unit 520 can communicate with a device connected to the network 900, for example, the server device 8 through the network 900.
- the wired communication unit 520 can input the information received from the network 900 to the control unit 500.
- the wired communication unit 520 can also output the information received from the control unit 500 to the network 900.
- the camera 530 can capture an image of a place where the roadside device 5 is installed, in this example, an image of the intersection 2.
- the image generated by the camera 530 and showing the state of the intersection 2 is input to the control unit 500.
- the camera 530 can capture moving images and still images.
- the control unit 500 can cause, for example, the wireless communication unit 510 to transmit the image received from the camera 530 to the electronic device 10 and the vehicle 6. Further, the control unit 500 can analyze the image received from the camera 530 and detect a pedestrian (for example, the user 9 of the electronic device 10) and the vehicle 6 present at the intersection 2.
- the control unit 500 can cause, for example, the wireless communication unit 510 to transmit information regarding the detected pedestrian and vehicle 6 to the vehicle 6 and the electronic device 10.
- the sensor 540 can detect the condition of the place where the roadside device 5 is installed, in this example, the condition of the intersection 2.
- the sensor 540 includes, for example, a 3D laser scanner and an infrared sensor.
- the sensor 540 can detect, for example, the pedestrian 9 and the vehicle 6 present at the intersection 2.
- the sensor 540 outputs the detection result to the control unit 500.
- the control unit 500 performs various processes based on the detection result from the sensor 540 and the like. For example, the control unit 500 causes the wireless communication unit 510 to transmit the detection result of the sensor 540 to the electronic device 10 and the vehicle 6.
- control unit 500 generates notification information to be notified to the electronic device 10 and notification information to be notified to the vehicle 6 based on the detection result from the sensor 540 and the analysis result on the image received from the camera 530. Then, the control unit 500 causes the wireless communication unit 510 to transmit the generated notification information.
- the configuration of the sensor 540 is not limited to the above.
- the roadside device 5 may be capable of wireless communication with the network 900.
- the roadside device 5 may also be capable of performing near field communication.
- the roadside device 5 may be capable of wireless communication in accordance with Bluetooth.
- FIG. 7 is a block diagram showing an example of the configuration of the server device 8.
- the server device 8 includes a control unit 800 and a communication unit 810.
- the control unit 800 can centrally manage the operation of the server device 8 by controlling other components of the server device 8.
- the controller 800 includes at least one processor to provide control and processing capabilities to perform various functions, as described in further detail below.
- the above description of the processor included in the control unit 100 of the electronic device 10 is also applicable to the processor included in the control unit 800.
- the control unit 800 includes a CPU 801, a DSP 802, and a storage unit 803.
- the storage unit 803 includes a non-transitory recording medium readable by the CPU 801 and the DSP 802, such as a ROM and a RAM.
- the ROM of the storage unit 803 is, for example, a flash ROM which is a non-volatile memory.
- the storage unit 803 stores a plurality of control programs 804 for controlling the server device 8, map information 805, and the like.
- the various functions of the control unit 800 are realized by the CPU 801 and the DSP 802 executing various control programs 804 in the storage unit 803.
- the storage unit 803 may include a non-transitory storage medium readable by a computer other than the ROM and the RAM. At least one control program 804 in the storage unit 803 may be stored in advance in the storage unit 803. Further, at least one control program 804 in the storage unit 803 may be downloaded by the server device 8 from another device and stored in the storage unit 803. Further, all the functions of the control unit 800 or a part of the functions of the control unit 800 may be realized by a hardware circuit that does not require software for realizing the functions.
- the communication unit 810 is connected to the network 900 by wire or wirelessly.
- the communication unit 810 can communicate with devices connected to the network 900, for example, the electronic device 10 and the roadside device 5 through the network 900.
- the communication unit 810 can input the information received from the network 900 to the control unit 800.
- the communication unit 810 can output the information received from the control unit 800 to the network 800.
- the control unit 800 can manage the map information 805.
- the control unit 800 can update the map information 805 based on the information and the like received by the communication unit 810.
- the map information 805 includes road information 806 related to roads in Japan.
- a road is a term including a roadway and a sidewalk.
- the road information 806 may include information on roads in countries other than Japan.
- the map information 805 includes information other than the road information 806, such as facility information.
- the road information 806 includes, for example, road identification information for identifying a road and information for identifying a connection between roads.
- road identification information for identifying a road for example, road type information indicating the type of the road (for example, whether it is a national road or a prefectural road), and a node (node) set for the road Node-specific information for pedestrians and pedestrian crossing position information indicating the position of pedestrian crossings set on a roadway included in the road is included. It can be said that nodes set on roads are representative points.
- the node identification information includes identification information for identifying the node, node position information indicating the position of the node, and the like.
- the pedestrian crossing position information indicates, for example, the position (for example, coordinates) of a representative point set on the pedestrian crossing.
- the representative point is set, for example, at the center of the pedestrian crossing.
- the road identification information for identifying a road includes the number of lanes of the driveway included in the road, the legal speed on the driveway, and central band information indicating whether or not the central zone exists on the driveway.
- the central band information also includes information on the width of the central band and the like.
- the server device 8 may have a configuration other than the control unit 800 and the communication unit 810.
- the server device 8 may include, for example, a display device such as a liquid crystal display device.
- the server device 8 may also include an input device such as a touch panel for the user to input information to the server device 8.
- the electronic device 10 may notify the surroundings. Sometimes there is no need.
- the control unit 500 of the electronic device 10 specifies the state of the user 9, and based on the specified result, whether the electronic device 10 notifies the outside of the electronic device 10 or not Perform notification determination processing to determine.
- the notification that the electronic device 10 notifies the outside of the electronic device 10 may be referred to as “external notification”.
- region in which the pedestrian crossing 3 does not exist in the roadway 7 may be called “the area outside a pedestrian crossing.”
- the road information 806 targeted for explanation and the pedestrian crossing 3 may be called “target road information 806” and “target pedestrian crossing 3”, respectively.
- FIG. 8 is a diagram showing an example of the notification determination process. The notification determination process shown in FIG. 8 is repeatedly performed.
- step s 1 the control unit 100 acquires road information 806 related to a road around the current position of the electronic device 10 from the server device 8 through the wireless communication unit 110.
- the control unit 100 stores the acquired road information 806 in the storage unit 103.
- step s 1 the control unit 100 causes the wireless communication unit 110 to transmit the position information acquired by the reception unit 140 to the server device 8.
- the control unit 800 of the server device 8 acquires road information 806 related to roads around the current position of the electronic device 10 from the map information 805 in the storage unit 803 based on the position information from the electronic device 10.
- the control unit 800 causes the communication unit 810 to transmit the acquired road information 806 to the electronic device 10.
- the electronic device 10 can acquire, from the server device 8, road information 806 related to the road around the current position of the electronic device 10.
- step s2 the control unit 100 controls the user 9 to use the road 7 based on the position information of the electronic device 10 acquired by the receiving unit 140 and the target road information 806 in the storage unit 103 acquired in step s1. Determine if you are going to go out.
- step s2 for example, based on the position information of the electronic device 10 and the target road information 806, the control unit 100 sets the first condition that the electronic device 10 exists very close to the road 7 (for example, within 1 m). It is determined whether the condition is satisfied. When the control unit 100 determines that the first condition is satisfied, whether the second condition that the electronic device 10 is advancing toward the road 7 which is very near to the electronic device 10 is determined according to the condition of the electronic device 10.
- the determination is made based on the position information and the target road information 806.
- the control unit 100 determines that the first condition and the second condition are satisfied, the control unit 100 determines that the user 9 is about to exit the road 7.
- the control unit 100 determines that the user 9 is not going to exit the road 7.
- the control unit 100 determines that the second condition is not satisfied, the control unit 100 determines that the user 9 is not going to exit the road 7.
- step s2 If it is determined in step s2 that the user 9 is not going to exit on the road 7, the control unit 100 ends the notification determination process. On the other hand, when the control unit 100 determines in step s2 that the user 9 is going to exit on the roadway 7, it determines whether or not the user 9 is about to enter the pedestrian crossing 3 in step s3.
- the process in step s3 will be described in detail later. The process in step s3 may be called "crosswalk approach determination".
- control unit 100 determines in step s4 that the electronic device 10 does not perform external notification.
- control unit 100 determines that the user 9 is not going to enter the pedestrian crossing 3 in step s3, that is, when it is determined that the user 9 is going to go out of the pedestrian crossing outside area, It is decided that the device 10 performs external notification.
- step s5 when it is determined that the electronic device 10 performs the external notification, the control unit 100 generates notification information for notifying that the user 9 is about to exit the road 7. Then, the control unit 100 causes the wireless communication unit 110 to transmit the generated notification information.
- the notification information may be notified directly to the vehicle 6 around the electronic device 10 or may be notified to the vehicle 6 through the roadside device 5.
- the vehicle 6 that has received the notification information displays warning information for notifying the driver that there is a pedestrian jumping out on the roadway 7 in the car navigation device, for example, or a warning sound from the car navigation device Output.
- the electronic device 10 decides not to perform external notification when the user 9 tries to enter the pedestrian crossing 3, in other words, when the user 9 tries to traverse the pedestrian crossing 3.
- the possibility of the electronic device 10 giving a poor notification can be reduced.
- the possibility of the vehicle 6 receiving a poor notification from the electronic device 10 can be reduced.
- the traffic light for pedestrians may be installed in the pedestrian crossing 3, and the roadside machine 5 may transmit crossing prohibition information.
- Crossing prohibition information is information indicating that a pedestrian signal prohibits crossing of the pedestrian crossing 3.
- the electronic device 10 may make an external notification even if it is determined that the user 9 is going to enter the pedestrian crossing 3.
- the crossing prohibition information includes, for example, information indicating that the pedestrian traffic signal emits a red light.
- the crossing prohibition information may include information indicating that the pedestrian traffic signal emits a yellow light.
- the control unit 100 can determine whether the user 9 is about to enter the pedestrian crossing 3, based on the pedestrian crossing position information included in the road information 806 in the storage unit 103. For example, as shown in FIG. 9, the control unit 100 determines whether the user 9 is located within a range 31 of a predetermined radius from the representative point 30 indicated by the pedestrian crossing position information based on the position information obtained by the receiving unit 140. It is determined whether or not. When the user 9 is not located in the range 31, the control unit 100 determines that the user 9 is not trying to enter the pedestrian crossing 3.
- the control unit 100 determines that the user 9 is about to enter the pedestrian crossing 3.
- the user 9 who tries to enter the pedestrian crossing 3 from the sidewalk 71 included in the road 70 is shown.
- control unit 100 can determine whether the user 9 is about to enter the pedestrian crossing 3 based on the pedestrian crossing position information. However, in this case, depending on the length of the pedestrian crossing 3, the control unit 100 may not be able to appropriately determine whether the user 9 is about to enter the pedestrian crossing 3.
- the control unit 100 may determine that the user 9 is about to enter the pedestrian crossing 3 after the user 9 starts crossing the pedestrian crossing 3. As a result, the control part 100 may not be able to appropriately determine whether the user 9 is going to enter the pedestrian crossing 3 in the pedestrian crossing entrance determination in step s3. As a result, although the user 9 actually enters the pedestrian crossing 3, there is a possibility that the electronic device 10 performs an external notification, and an unnecessary notification may be transmitted from the electronic device 10 to the surroundings. There is.
- control part 100 performs entrance presumption processing which presumes the entrance at the time of a person crossing pedestrian crossing 3, based on road information 806. Then, in step s3, the control unit 100 determines whether the user 9 is about to enter the pedestrian crossing 3, based on the position information of the electronic device 10 and the entrance of the pedestrian crossing 3 estimated. In addition, it can be said that the entrance of the pedestrian crossing 3 is an exit when a person leaves the pedestrian crossing 3. Moreover, it can be said that the entrance of the pedestrian crossing 3 is the entrance of the pedestrian crossing 3 concerned. Below, an example of entrance entrance presumption processing is explained.
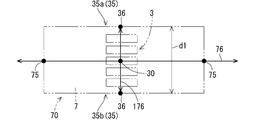
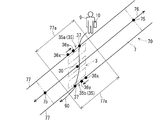
- the road information 806 includes position information indicating the position of the node 75 set on the road 70.
- FIG. 11 is a diagram showing an example of the node 75 set on the road 70. As shown in FIG. The nodes 75 are set, for example, at both ends of the road 70, respectively. The node 75 is set, for example, at the center of the road 70 in the width direction.
- position information of the node 75 set on the road 70 including the pedestrian crossing 3 and position information (crosswalk positional information) of the representative point 30 of the pedestrian crossing 3 are used.
- the entrance 35 of the pedestrian crossing 3 is estimated. For example, the entrance 35 of the pedestrian crossing 3 is estimated by determining the representative point 36 of the entrance 35 of the pedestrian crossing 3.
- first entrance 35a first entrance 35a
- second entrance 35b second entrance 35b
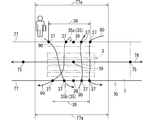
- FIG. 12 is a diagram for explaining an example of entrance entrance estimation processing.
- FIG. 13 is a flowchart showing an example of the entrance estimation process.
- the entrance estimation process is performed, for example, in parallel with the above-described notification determination process.
- the entrance estimation process is repeatedly performed.
- step s11 the control unit 100 acquires, from the storage unit 103, road information 806 (target road information 806) regarding the road 70 including the pedestrian crossing 3.
- the control unit 100 acquires road information 806 related to the road 70 including the pedestrian crossing 3 from the road information 806 from the server device 8 stored in the storage unit 103 by executing the above-described step s1, for example.
- the road 70 corresponding to the information indicated by the target road information 806 may be referred to as the “target road 70”.
- step s12 the control unit 100 obtains the width d1 of the roadway 7 of the target road 70 based on the target road information 806 acquired in step s11 (see FIG. 12). For example, the control unit 100 estimates the width d1 of the roadway 7 of the target road 70 based on the road type information, the number of lanes, and the central band information included in the road identification information of the target road information 806. Find d1.
- the width of the roadway 7 of the target road 70 changes according to the type of the target road 70 (for example, whether it is a national road or a prefectural road), the lane, the presence or absence of the central zone, and the width of the central zone.
- the control unit 100 can estimate the width d1 of the road 7 with a certain degree of accuracy based on the road type information, the number of lanes, and the center band information.
- the storage unit 103 stores a table in which road type information, the number of lanes, central band information, and the width d1 of the road 7 are associated with each other.
- the control unit 100 can obtain the width d1 of the road 7 based on the table.
- the target road information 806 includes road width information indicating the width of the road 7 of the target road 70, the width indicated by the road width information may be used.
- the control unit 100 specifies the extending direction of the target road 70 (in other words, the direction in which the target road 70 extends) based on the target road information 806. For example, based on the position information of two nodes 75 (see FIG. 12) respectively set at both ends of the target road 70 included in the target road information 806, the control unit 100 sets the direction connecting the two nodes 75 The specified direction is specified as the extending direction 76 of the target road 70 (see FIG. 12).
- step s14 the control unit 100 causes the width d1 of the roadway 7 obtained in step s12, the extending direction 76 specified in step s13, and the crossing provided on the target road 70 included in the target road information 806. Based on the position information (crosswalk position information) of the representative point 30 of the sidewalk 3 (target crosswalk 3), the entrance 35 of the crosswalk 3 is estimated.
- step s14 the control unit 100 specifies a direction 176 (see FIG. 12) perpendicular to the extending direction 76 of the target road 70.
- the control unit 100 specifies a point 36 separated from the representative point 30 of the target pedestrian crossing 3 by a half of the width d1 of the roadway 7 along the specified direction 176.
- there are two points 36 which are separated from the representative point 30 of the target pedestrian crossing 3 by a half of the width d1 of the road 7 along the identified direction 176.
- the control unit 100 sets one of the two points 36 as a representative point 36 of the entrance 35 at one end in the longitudinal direction of the target pedestrian crossing 3.
- control unit 100 sets the other point 36 of the two points 36 as the representative point 36 of the entrance 35 at the other end of the target crosswalk 3 in the longitudinal direction. Thereby, the 1st entrance 35a and the 2nd entrance 35b located in the both ends of the longitudinal direction of object pedestrian crossing 3 are presumed.
- the control unit 100 generates position information indicating the position of the representative point 36 of the entrance 35 as the position information of the entrance 35 for each entrance 35.
- step s15 the control unit 100 causes the wireless communication unit 110 to transmit data including position information of each entrance 35 of the target pedestrian crossing 3 and position information of the representative point 30 of the target pedestrian crossing 3 to the server device 8. Send to Thus, the entrance estimation process ends. In the next entrance estimation process, the entrance of the pedestrian crossing 3 different from the pedestrian crossing 3 whose entrance is estimated in the previous entrance estimation process is estimated.
- the server device 8 updates the road information 806 in the storage unit 803 based on the data received from the electronic device 10.
- the control unit 800 of the server device 8 includes the pedestrian crossing 3 in the storage unit 803 based on the position information of the representative point 30 of the pedestrian crossing 3 included in the data from the electronic device 10
- Road information 806 about the road 70 is specified.
- the control unit 800 includes the position information of the representative point 36 of each entrance 35 of the pedestrian crossing 3, which is included in the data from the electronic device 10, in the road identification information of the identified road information 806.
- the information 806 is updated.
- road information 806 concerning the road 70 including the crosswalk 3 on which the entrance estimation process has been performed is transmitted from the server device 8 to the electronic device 10, the position of the representative point 36 of each entrance 35 of the crosswalk 3.
- Road information 806 including information is transmitted.
- the electronic device 10 estimates the first entrance 35 a and the second entrance 35 b of the pedestrian crossing 3 based on the road information 806 and generates position information of them.
- the position information of the first entrance 35 a and the second entrance 35 b generated by the electronic device 10 is included in the road information 806 stored by the server device 8.
- step s3 when the control unit 100 determines in step s2 that the user 9 is going to leave the road 7, in step s3, the road 7 is set as the target road 7 and the pedestrian crossing 3 It is determined based on the road information 806 in the storage unit 103 whether or not it is included.
- the control unit 100 determines that the pedestrian crossing 3 is not included in the target roadway 7, the control unit 100 determines that the user 9 who is about to enter the targeting road 7 is not going to enter the pedestrian crossing 3.
- the control unit 100 determines that the crosswalk 3 is included in the target roadway 7, the control information of the first entrance 35a and the second entrance 35b of the crosswalk 3 (target crosswalk 3) , Acquired from the road information 806 received from the server device 8 in the storage unit 103.
- the position information of the first entrance 35 a and the second entrance 35 b generated by the electronic device 10 is included in the road information 806 stored by the server device 8. Therefore, the control unit 100 can acquire the position information of the first entrance 35 a and the second entrance 35 b of the target pedestrian crossing 3 from the road information 806 from the server device 8 in the storage unit 103.
- the control unit 100 determines whether the user 9 is about to enter the target pedestrian crossing 3. Determine if For example, when the electronic device 10 exists within a range of a predetermined radius from the representative point 36 of the first entrance 35 a, the control unit 100 causes the user 9 who is entering the road 7 to enter the target pedestrian crossing 3 Determine that you are about to enter. In addition, when the electronic device 10 exists within the range of a predetermined radius from the representative point 36 of the second entrance 35 b, the control unit 100 causes the user 9 who is entering the road 7 to enter the target pedestrian crossing 3. Determine that you are about to enter.
- control unit 100 does not have the electronic device 10 within the range of the radius predetermined distance from the representative point 36 of the first entrance 35a, and within the range of the radius predetermined distance from the representative point 36 of the second entrance 35b. If the electronic device 10 does not exist, the user 9 who is about to enter the road 7 determines that it is not about to enter the target pedestrian crossing 3.
- step s3 when the control unit 100 can not acquire the position information of each entrance 35 of the target pedestrian crossing 3 from the road information 806 received from the server device 8 in the storage unit 103, the control unit 100
- the entrance estimation process may be performed based on the road information 806 to generate position information of each entrance 35 of the target pedestrian crossing 3.
- the control unit 100 may determine whether or not the user 9 is about to enter the target pedestrian crossing 3 based on the position information of the representative point 30 of the target pedestrian crossing 3. In this case, for example, as shown in FIG. 9 described above, the control unit 100 is within the range 31 of the radius predetermined distance from the representative point 30 of the target pedestrian crossing 3 based on the position information obtained by the receiving unit 140.
- control unit 100 determines that the user 9 is not trying to enter the pedestrian crossing 3. On the other hand, when the user 9 is located in the range 31, the control unit 100 determines that the user 9 is about to enter the pedestrian crossing 3.
- the control unit 100 is based on the position information of itself and the position information of a predetermined place on the road 7 (in the above example, the entrance of the pedestrian crossing 3 in the road 7), It is decided whether to make an external notification or not. Then, the control unit 100 determines, based on the road information 806, a predetermined place on the road 7 used in the determination of whether or not to perform external notification. As a result, the user 9 can use the electronic device 10 that determines whether to perform external notification by using a predetermined location on the road 7 determined based on the road information 806. Thus, the convenience of the electronic device 10 is improved.
- control unit 100 estimates an entrance when a person crosses the road 7, and sets the estimated entrance as a predetermined place on the road 7 used in the determination of whether to perform external notification.
- the control unit 100 estimates the entrance 35 when a person crosses the pedestrian crossing 3, and the entrance 35 thus estimated is used on the road 7 used to decide whether to perform external notification or not. It is taken as a predetermined place of Thereby, the electronic device 10 can determine whether to perform external notification using its own position information and the position information of the entrance of the pedestrian crossing 3.
- the electronic device 10 determines whether the user 9 is about to enter the pedestrian crossing based on the position information of itself and the positional information of the entrance 35 of the pedestrian crossing 3, and It is possible to determine whether to perform external notification based on the determination result.
- the position information of the representative point 36 of the entrance 35 is used as the position information of the entrance 35 of the pedestrian crossing 3, the data amount of the position information of the entrance 35 can be reduced it can. Therefore, the data processing amount in the electronic device 10 can be reduced.
- the electronic device 10 may perform processing of notifying the surrounding of notification information for notifying that a person is going to cross the pedestrian crossing 3, instead of step s4 in the above-described notification determination processing.
- the electronic device 10 may transmit the notification information to the roadside device 5 or may notify the surrounding vehicle 6.
- the roadside device 5 transmits, for example, notification information received from the electronic device 10 to the surrounding vehicle 6.
- the vehicle 6 having received the notification information notifies, for example, the driver that a person is going to cross the pedestrian crossing 3, using a display or a sound. As a result, the driver can drive the vehicle 6 while paying attention to the person trying to cross the pedestrian crossing 3.
- the electronic device 10 may execute the steps s12 to s14 of the entrance estimation process in the process of step s3 of the notification determination process to acquire the position information of each entrance 35 of the target pedestrian crossing 3. .
- step s15 is performed after step s4 and after step s5.
- the entrance 35 of the pedestrian crossing 3 estimated is used by determination of whether a person is going to approach the said pedestrian crossing 3, it may be used for another purpose.
- the entrance 35 of the estimated pedestrian crossing 3 can be used to confirm the child's behavior before the pedestrian crossing 3.
- the electronic device 10 determines the action of the user 9 (for example, a child) before the pedestrian crossing 3 based on the position information of itself and the positional information of the entrance 35 of the pedestrian crossing 3. For example, the electronic device 10 determines whether the user 9 (for example, a child) is stopped in front of the pedestrian crossing 3, the positional information of the electronic device 10, and the positional information of the entrance 35 of the pedestrian crossing 3 estimated.
- the electronic device 10 determines whether the moving speed is reduced before the pedestrian crossing 3 based on the positional information of the electronic device 10 and the estimated positional information of the entrance 35 of the pedestrian crossing 3 whether the user 9 is reducing the moving speed. judge.
- the determination result may be transmitted to the electronic device 10 owned by the parent of the child who is the user 9 using an electronic mail or the like.
- the parent electronic device 10 that receives the determination result displays the determination result, for example. Thus, the parent can check whether the child is acting safely by using the electronic device 10 owned by the parent.
- the electronic device 10 owned by the child may transmit the position information of the electronic device 10 and the estimated position information of the entrance 35 to the electronic device 10 owned by the parent.
- the electronic device 10 owned by the parent may determine the behavior of the child in front of the pedestrian crossing 3, based on the received position information.
- the electronic device 10 owned by a child may transmit the position information of the electronic device 10 and the position information of the entrance 35 estimated to the roadside device 5 or the server device 8. In this case, even if the roadside machine 5 or the server device 8 determines the behavior of the child in front of the pedestrian crossing 3 based on the received position information, and transmits the determination result to the electronic device 10 owned by the parent. Good.
- the entrance estimation process may be performed by the roadside device 5 instead of the electronic device 10 or may be performed by the server device 8.
- the control unit 500 of the roadside device 5 acquires the road information 806 related to the road 70 including the crosswalk 3 from the server device 8 through the wired communication unit 520.
- Steps s12 to s14 performed by the control unit 500 are similar to the above-described steps s12 to s14 performed by the control unit 100.
- the control unit 500 causes the wired communication unit 520 to include data including position information of each entrance 35 of the target pedestrian crossing 3 and position information of the representative point 30 of the target pedestrian crossing 3. It is sent to the server device 8.
- the server device 8 updates the road information 806 in the same manner as described above based on the data from the roadside device 5.
- FIG. 14 is a flowchart showing an example of the entrance estimation process performed by the server device 8.
- the control unit 800 of the server device 8 reads road information 806 related to the road 70 including the pedestrian crossing 3 from the storage unit 803.
- control unit 800 executes steps s12a to s14a. Steps s12a to s14a performed by control unit 800 are the same as steps s12 to s14 described above performed by control unit 100, respectively.
- step s15a the control unit 800 updates the target road information 806 by including the position information of each entrance 35 of the target pedestrian crossing 3 in the road identification information of the target road information 806.
- the extending direction of the pedestrian crossing 3 is perpendicular to the extending direction 76 of the road 70 including the pedestrian crossing 3 as shown in FIGS.
- the position of the representative point 36 of the entrance 35 of the pedestrian crossing 3 is near the center of the actual entrance 35.
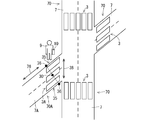
- the extending direction is not perpendicular to the extending direction 76 of the road 70.
- the said pedestrian crossing 3 is shown by FIG.
- the extending direction 38 of the pedestrian crossing 3A shown in FIG. 15 is not perpendicular to the extending direction 76 of the road 70A including the road 7A provided with the pedestrian crossing 3A.
- the representative point 36 of the entrance 35 of such a pedestrian crossing 3A is set as described above, the set representative point 36 can be largely separated from the center of the actual entrance 35 as shown in FIG. There is sex.
- the electronic device 10 may not be able to correctly determine whether or not the user 9 is about to enter the pedestrian crossing 3, based on the set position information of the representative point 36.
- the electronic device 10 performs a correction process to correct the position of the representative point 36 of the entrance 35 set as described above based on the position information of the electronic device 10. In this way, an entry point where a person is likely to enter at the entrance 35 of the pedestrian crossing 3 is estimated. Then, the electronic device 10 determines whether or not the user 9 is about to enter the pedestrian crossing 3, based on the estimated position information of the entry point where the person is likely to enter. Thereby, the electronic device 10 can determine more correctly whether the user 9 is going to approach the pedestrian crossing 3.
- FIG. 16 is a flowchart showing an example of the correction process according to the present embodiment.
- FIG. 17 is a diagram for explaining an example of the correction process according to the present embodiment.
- the correction process shown in FIG. 16 may be performed, for example, in parallel with the notification determination process and the entrance estimation process described above.
- the correction process may be repeatedly performed.
- step s21 the control unit 100 causes road information about the road around the current position of the electronic device 10 from the server device 8 through the wireless communication unit 110 in the same manner as step s1 described above. Get 806 Then, the control unit 100 stores the acquired road information 806 in the storage unit 103.
- step s22 the control unit 100 determines whether or not the user 9 is about to enter the pedestrian crossing 3, based on the target road information 806 acquired in step s21. Step s22 will be described in detail below.
- step s22 the control unit 100 specifies the pedestrian crossing 3 closest to the current position of the electronic device 10 based on the target road information 806 acquired in step s21.
- the control unit 100 can specify the pedestrian crossing 3 closest to the current position of the electronic device 10 based on the pedestrian crossing position information included in the road information 806 and the positional information acquired by the receiving unit 140. .
- the control unit 100 acquires position information of the representative point 36 of each entrance 35 of the specified pedestrian crossing 3 from the target road information 806 acquired in step s 21 in the storage unit 103. If the position information of the representative point 36 of each entrance 35 of the target pedestrian crossing 3 is not included in the target road information 806 in the storage unit 103, the control unit 100 ends the correction processing. Alternatively, the control unit 100 generates and acquires position information of the representative point 36 of each entrance 35 of the target pedestrian crossing 3 in the same manner as the entrance estimation process described above.
- the representative point 36 at which the position information is acquired in step s22 may be referred to as “pre-correction representative point 36x”.
- step s22 is completed.
- control unit 100 ends the correction processing.
- the control unit 100 determines that the user 9 is going to enter the target pedestrian crossing 3 in step s23, the control unit 100 specifies the movement route 90 (see FIG. 17) of the user 9 during a predetermined time.
- the control unit 100 specifies the moving route 90 of the user 9 based on the position information repeatedly acquired by the receiving unit 140.
- the movement path 90 can also be said to be a movement path of the electronic device 10.
- step s24 the control unit 100 specifies the passing point 37 (see FIG. 17) of the user 9 at the first entrance 35a and the second entrance 35b based on the movement path 90 specified at step s23. Step s24 will be described in detail below.
- step s24 the control unit 100 specifies the extending direction 76 of the road 70 including the target pedestrian crossing 3, based on the target road information 806 acquired in step s21, as in step s13 described above.
- control unit 100 is parallel to the extending direction 76 and parallel to the extending direction 76 parallel to the extending direction 76 and passing through the pre-correction representative point 36x of the first entrance 35a. And a parallel line 77 passing through the uncorrected representative point 36x of the second entrance 35b.
- the control unit 100 sets a predetermined range including the pre-correction representative point 36 x through which the parallel line 77 passes in each parallel line 77 as the monitoring target line 77 a. For example, a range of several meters from the uncorrected representative point 36x toward one end of the parallel line 77 and a range of several m from the uncorrected representative point 36x toward the other end of the parallel line 77 Be done.
- the control unit 100 specifies a passing point at which the user 9 crossing the target pedestrian crossing 3 passes the monitoring target line 77a based on the moving path 90 specified in step s23. Then, the control unit 100 determines that the specified passing point in the monitoring target line 77a is the passing point 37 of the user 9 at the entrance 35 corresponding to the pre-correction representative point 36x included in the monitoring target line 77a. The control unit 100 specifies the passing point 37 of the user 9 at the entrance 35 for each of the first entrance 35 a and the second entrance 35 b.
- the control unit 100 analyzes the movement route 90, specifies the passage point at which the user 9 passes the monitoring target line 77a lastly when crossing the object pedestrian crossing 3, and specifies the specified passage point. , And the passing point 37 of the user 9 at the entrance 35.
- step s24 the control unit 100 specifies the passing point 37 of the user 9 at each of the first entrance 35a and the second entrance 35b.
- a passing point 37 when the user 9 passes the entrance 35 of the pedestrian crossing 3 from the sidewalk to the roadway can be said to be an entering point when the user 9 enters the pedestrian crossing 3.
- step s25 the control unit 100 corrects the position of the uncorrected representative point 36x based on the identified passing point 37.
- a new representative point 36 obtained by correcting the position of the pre-correction representative point 36 x is an entry point that is highly likely to enter the target pedestrian crossing 3 when a person crosses the target pedestrian crossing 3.
- the new representative point 36 may be called “corrected representative point 36 y” (see FIG. 17).
- the position information of the representative point 36x before correction indicates the position coordinates (X1, Y1) of the representative point 36x before correction
- the position information of the passing point 37 indicates the position coordinates of the passing point 37 (X2, Y2).
- the position information of the representative point 36y after correction indicates the position coordinates (X3, Y3) of the representative point 36y after correction.
- the control unit 100 obtains position coordinates (X3, Y3) of the representative point 36y after correction using the following equations (1) and (2).
- W1 in equation (1) is a weighting factor, and is set to 0 ⁇ W1 ⁇ 1.
- W2 in the equation (2) is a weighting factor, and is set to 0 ⁇ W2 ⁇ 1.
- W1 and W2 are each set to 0.99, for example.
- the values of W1 and W2 are not limited to this. Also, W1 and W2 may be different from each other.
- step s25 the control unit 100 obtains position information (position coordinates (X3, Y3)) of the representative point 36y after correction in each of the first entrance 35a and the second entrance 35b.
- the wireless communication unit 110 detects the position information of the corrected representative point 36y of each entrance 35 of the target pedestrian crossing 3, Data including position information of representative points 30 of the target pedestrian crossing 3 is transmitted to the server device 8.
- the server device 8 updates the road information 806 in the storage unit 803 based on the data received from the electronic device 10.
- the control unit 800 of the server device 8 uses the target pedestrian crossing 3 in the storage unit 803 based on the position information of the representative point 30 of the target pedestrian crossing 3 included in the data from the electronic device 10.
- the road information 806 regarding the road 70 including is specified.
- the control unit 800 includes the position information of the corrected representative point 36 y of each entrance 35 of the target pedestrian crossing 3 included in the data from the electronic device 10 in the road specification information of the specified road information 806. , Update the road information 806 concerned.
- the position information of the representative point 36x before correction of each entrance 35 of the target pedestrian crossing 3, which is included in the road information 806, is deleted.
- the position information of the representative point 36 of the entrance 35 of the pedestrian crossing 3 included in the road information 806 is updated.
- the position of the representative point 36 of the entrance 35 of the pedestrian crossing 3 determined in the entrance estimation process is corrected based on the position information of the electronic device 10. Therefore, as in the case of the pedestrian crossing 3A shown in FIG. 15 described above, the extending direction of the pedestrian crossing 3 is not perpendicular to the extending direction 76 of the road 70 including the pedestrian crossing 3 Also, the possibility of the position of the representative point 36 being far from the center of the actual entrance 35 can be reduced. In the example of FIG. 17, the position of the representative point 36y after correction is closer to the center of the actual entrance 35 than the position of the representative point 36x before correction. Therefore, when a person crosses the pedestrian crossing 3, it can be said that the possibility of entering from the corrected representative point 36 is high. That is, it can be said that the corrected representative point 36 is an entry point where the possibility of entering the crosswalk 3 when a person crosses the crosswalk 3 is high.
- the electronic device 10 when a person crosses the pedestrian crossing 3, an approach point having a high possibility of entering the pedestrian crossing 3 is inferred. Other devices can do this. Thus, the convenience of the electronic device 10 is improved.
- the position of the corrected representative point 36y is determined based on the position of the uncorrected representative point 36x, the position of the passing point 37, and the weighting factor, but is determined by another method. It is also good. For example, each time the user 9 crosses the pedestrian crossing 3, the control unit 100 specifies the passing point 37 of the user 9 at the entrance 35. When the control unit 100 specifies the passing point 37 of the user 9 at the entrance 35 a plurality of times, the control unit 100 sets the average of the positions of the passing points 37 for a plurality of times obtained thereby to be the corrected representative point 36y.
- the above-described correction processing may be performed by the roadside device 5 instead of the electronic device 10, or may be performed by the server device 8.
- the control unit 500 of the roadside device 5 causes the wired communication unit 520 to transmit the position information of the roadside device 5 to the server device 8 in step s21.
- the control unit 800 of the server device 8 acquires road information 806 related to the road around the roadside device 5 from the map information 805 in the storage unit 803 based on the received position information of the roadside device 5.
- the control unit 800 causes the communication unit 810 to transmit the acquired road information 806 to the roadside device 5.
- the roadside device 5 can acquire, from the server device 8, road information 806 related to roads in the vicinity thereof.
- Steps s22 to s25 performed by the control unit 500 are the same as the above-described steps s22 to s25 performed by the control unit 100. However, in order to execute steps s22 and s23, the control unit 500 needs to acquire the position information of the electronic device 10 from the electronic device 10 through the wireless communication unit 510. After step s25, in step s26, the control unit 500 causes the wired communication unit 520 to correct the position information of the representative point 36 of each entrance 35 of the target pedestrian crossing 3 and the representative point 30 of the target pedestrian crossing 3. It causes the server device 8 to transmit data including position information. The control unit 800 of the server device 8 updates the road information 806 based on the received data in the same manner as described above.
- FIG. 19 is a flowchart showing an example of the correction process performed by the server device 8.
- the control unit 800 of the server device 8 causes the storage unit 803 to convert road information 806 (target road information 806) related to the road 70 including the pedestrian crossing 3 (target pedestrian crossing 3). get.
- step s22a the control unit 800 determines whether or not the user 9 is about to enter the target pedestrian crossing 3, based on the target road information 806 acquired in step s21a.
- step s22a the control unit 800 acquires position information of the electronic device 10 from the electronic device 10 through the communication unit 810. Then, the control unit 800 controls the position information of the acquired electronic device 10 and the position information of the representative point 36x before correction of each entrance 35 of the target pedestrian crossing 3 included in the target road information 806 acquired in step s21a. Based on it, it is determined in the same manner as above whether or not the user 9 is about to enter the target pedestrian crossing 3.
- step s22a If it is determined in step s22a that the user 9 is not about to enter the target pedestrian crossing 3, the correction process ends. On the other hand, when it is determined in step s22a that the user 9 is about to enter the target pedestrian crossing 3, the control unit 800 executes steps s23a to s25a. Steps s23a to s25a performed by the control unit 800 are similar to the above-described steps s23 to s25 performed by the control unit 100. However, in order to execute step s23a, the control unit 800 needs to acquire the position information of the electronic device 10 from the electronic device 10 through the communication unit 810.
- step s26a the control unit 800 includes the position information of the corrected representative point 36y of each entrance 35 of the target pedestrian crossing 3 in the road identification information of the target road information 806 acquired in step s21a. Then, the target road information 806 is updated. At this time, the position information of the representative point 36x before correction of each entrance 35 of the target pedestrian crossing 3, which is included in the target road information 806, is deleted.
- the server device 8 is road information 806 related to the road 70 including the pedestrian crossing 3 based on the position information of the representative point 36 y after correction of the entrance 35 for the same pedestrian crossing 3 notified from the plurality of electronic devices 10. May be updated.
- the control unit 800 of the server device 8 is based on the position information of the representative point 36 y of the entrance 35 for the same pedestrian crossing 3 (target pedestrian crossing 3) notified from the plurality of electronic devices 10. The average position information indicating the average of the positions of the representative points 36 y after correction is generated. Then, the control unit 800 determines the position information of the representative point 36 of the target pedestrian crossing 3 included in the road information 806 (target road information 806) on the road 70 including the target pedestrian crossing 3 in the storage unit 803.
- the position information of the representative point 36 of the target pedestrian crossing 3 included in the target road information 806 is updated, and as a result, the target road information 806 is updated. This updating process is performed on the position information of the representative point 36 of each entrance 35 of the target pedestrian crossing 3 included in the target road information 806.
- control unit 500 of the roadside device 5 is notified of from the plurality of electronic devices 10 on the basis of the position information of the representative point 36y of the entrance 35 for the same pedestrian crossing 3, the corrected representative point 36y. Average position information indicating an average of the positions may be generated.
- the control unit 500 causes the wired communication unit 520 to transmit the generated average position information to the server device 8.
- the control unit 800 of the server device 8 uses the received position information of the representative point 36 of the pedestrian crossing 3, which is included in the road information 806 about the road 70 including the pedestrian crossing 3, in the storage unit 803. replace.
- FIG. 20 is a flowchart showing an example of the correction process in the roadside device 5 in this case.
- FIG. 21 is a flowchart showing an example of the correction process in the server device 8 in this case.
- each electronic device 10 repeatedly transmits its own position information to the roadside device 5.
- each electronic device 10 repeatedly transmits its own position information to the server device 8.
- the position information of the electronic device 10 may be referred to as “device position information”.
- step s21b the control unit 500 of the roadside device 5 acquires road information 806 related to roads in the vicinity of itself from the server device 8 via the wired communication unit 520.
- the control unit 500 causes the wired communication unit 520 to transmit the position information of the roadside device 5 to the server device 8.
- the control unit 800 of the server device 8 acquires road information 806 related to the road around the roadside device 5 from the map information 805 in the storage unit 803 based on the received position information of the roadside device 5.
- the control unit 800 causes the communication unit 810 to transmit the acquired road information 806 to the roadside device 5.
- the roadside device 5 can acquire, from the server device 8, road information 806 (target road information 806) related to roads in the vicinity thereof.
- step s22b the control unit 500 controls the crosswalk position information (representative point) in the target road information 806 based on the device position information notified by each electronic device 10 and the target road information 806 acquired in step s21b. It is determined whether or not the users 9 of the plurality of electronic devices 10 are about to enter the same pedestrian crossing 3 that includes the 30 position information). As described above, it can be determined whether or not the user 9 of the electronic device 10 is about to enter the pedestrian crossing 3, so the control unit 500 determines the pedestrian crossing position information (representative point 30) in the target road information 806. It is possible to determine whether or not the users 9 of the plurality of electronic devices 10 are about to enter the same pedestrian crossing 3 in which the position information of (1) is included.
- step s22b If it is determined No in step s22b, the correction process ends. On the other hand, when it is determined in step s22b that the users 9 of the plurality of electronic devices 10 are about to enter the same pedestrian crossing 3 (target pedestrian crossing 3), the control unit 500 performs the target pedestrian crossing 3 in step s23b.
- the movement paths 90 of the users 9 of the plurality of electronic devices 10 who are about to enter are identified based on the device position information from the plurality of electronic devices 10.
- step s24b the control unit 500 generates the target pedestrian crossing 3 based on the movement routes 90 of the users 9 of the plurality of electronic devices 10 specified in step s23b and the target road information 806 acquired in step s21b.
- the passing points 37 of the users of the plurality of electronic devices 10 at the entrance 35 are identified.
- the method of specifying the passing point 37 is the same as described above.
- FIG. 22 is a diagram illustrating an example of the passing point 37 identified in step s21 b.
- step s25b the control unit 500 determines a representative point 36 (pre-correction representative point of the entrance 35 of the target pedestrian crossing 3) based on the passing points 37 of the users of the plurality of electronic devices 10 specified in step s24b. Correct the position of 36x).
- the control unit 500 generates, for example, average position information indicating the average of the positions of the passing points 37 of the users of the plurality of electronic devices 10 specified in step s24b.
- the control unit 500 adopts the generated average position information as the position information of the representative point 36 y after correction of the entrance 35 of the target pedestrian crossing 3.
- the control unit 500 similarly obtains position information of the corrected representative point 36y of the first entrance 35a and the second entrance 35b.
- step s26b the control unit 500 causes the wired communication unit 520 to provide position information of the representative point 36y after correction of each entrance 35 of the target pedestrian crossing 3 and position information of the representative point 30 of the target pedestrian crossing 3. It causes the server device 8 to transmit the included data.
- the control unit 800 of the server device 8 updates the road information 806 based on the received data in the same manner as described above.
- the server device 8 corrects the position of the representative point 36 of the entrance 35 of the pedestrian crossing 3 based on the device position information notified from the plurality of electronic devices 10 and the road information 806 in the same manner as the roadside device 5 can do.
- the control unit 800 of the server device 8 causes the storage unit 803 to convert road information 806 (target road information 806) related to the road 70 including the pedestrian crossing 3 (target pedestrian crossing 3). get.
- step s22c the control unit 800 controls the plurality of electronic devices 10 with respect to the target crosswalk 3 based on the device position information notified by each electronic device 10 and the target road information 806 acquired in step s21c. It is determined whether or not the user 9 is trying to enter.
- step s22c If it is determined No in step s22c, the correction process ends. On the other hand, when it is determined in step s22c that the users 9 of the plurality of electronic devices 10 are about to enter the object pedestrian crossing 3, in step s23 c, the control unit 800 tries to enter the object pedestrian crossing 3 The movement path 90 of the user 9 of the electronic device 10 is specified based on the device position information from the plurality of electronic devices 10.
- Steps s24c and s25c performed by the control unit 800 are the same as steps s24b and s25b described above performed by the control unit 500 of the roadside device 5.
- step s26c the control unit 800 includes the position information of the corrected representative point 36y of each entrance 35 of the target pedestrian crossing 3 in the road identification information of the target road information 806 acquired in step s21c. Then, the target road information 806 is updated. At this time, the position information of the representative point 36x before correction of each entrance 35 of the target pedestrian crossing 3, which the target road information 806 contains, is deleted.
- the roadside machine 5 or the server device 8 is based on the position information of the passing point 37 (access point) of the person at the entrance 35 of the same pedestrian crossing 3 (target pedestrian crossing 3) specified by the plurality of electronic devices 10.
- the position of the representative point 36 of the entrance 35 may be corrected. That is, the roadside device 5 or the server device 8 crosses the pedestrian crossing 3 based on the position information of the passing point 37 of the person at the entrance 35 of the same pedestrian crossing 3 specified by the plurality of electronic devices 10. When doing, you may estimate the approach point with high possibility of entering the said pedestrian crossing 3.
- the roadside device 5 or the server device 8 is similar to the above steps s25b and s25c.
- the position of the uncorrected representative point 36x of the entrance 35 of the pedestrian crossing 3 is corrected to generate position information of the corrected representative point 36y.
- the user 9 may enter the pedestrian crossing 3 from a position far away from the representative point 36 of the entrance 35 of the pedestrian crossing 3. is there. As a result, even though the user 9 tries to cross the pedestrian crossing 3, the electronic device 10 may be located outside the range 360 of a predetermined distance from the representative point 36. In this case, although the user 9 is going to cross the pedestrian crossing 3, it may not be determined that the user 9 is going to enter the pedestrian crossing 3 in step s3 of the notification determination process.
- the entrance 35 of the pedestrian crossing 3 is estimated by a line. That is, in the entrance estimation process, the electronic device 10 estimates an approach line which is likely to enter the pedestrian crossing 3 when a person crosses the pedestrian crossing 3. As a result, it is possible to reduce the possibility that it will not be determined that the user 9 is going to enter the pedestrian crossing 3, even though the user 9 is going to cross the pedestrian crossing 3.
- the entrance estimation process according to another example of the present embodiment will be described in detail below. In the other example of the present embodiment described here, the above-described correction processing is not performed.
- FIG. 24 is a diagram for explaining an entrance estimation process according to another example of the present embodiment.
- the control unit 100 of the electronic device 10 specifies the movement route 90 of the user 9 based on the position information acquired by the receiving unit 140 in parallel with the execution of the entrance estimation process. .
- the control unit 100 executes steps s11 to s13 in the same manner as described above. After step s13, in step s14, the control unit 100 performs the first operation based on the target road information 806 acquired in step s11 and the movement route 90 of the user 9 identified in parallel with the execution of the entrance estimation process.
- the entrance 35 a and the second entrance 35 b are estimated by lines. Step s14 according to another example of the present embodiment will be described in detail below.
- step s14 the control unit 100 obtains the representative point 36 of the first entrance 35a and the representative point 36 of the second entrance 35b in the same manner as described above. And control part 100 specifies pass point 37 of user 9 in entrance 35 about each of the 1st entrance 35a and the 2nd entrance 35b like the above-mentioned step s24.
- control unit 100 extends parallel to the extending direction 76 of the target road 70 and with a parallel line 77 passing through the representative point 36 of the first entrance 35a.
- a parallel line 77 parallel to the direction 76 and passing through the representative point 36 of the second entrance 35 b is determined.
- control unit 100 sets a predetermined range including the representative point 36 through which the parallel line 77 passes, as the monitoring target line 77a.
- the control unit 100 specifies a passing point at which the user 9 crossing the target pedestrian crossing 3 passes the monitoring target line 77a based on the identified movement path 90. Then, the control unit 100 determines that the specified passing point in the monitoring target line 77a is the passing point 37 of the user 9 at the entrance 35 corresponding to the representative point 36 included in the monitoring target line 77a. The control unit 100 specifies the passing point 37 of the user 9 at the entrance 35 for each of the first entrance 35 a and the second entrance 35 b.
- the control unit 100 analyzes the movement route 90, specifies the passage point at which the user 9 finally passes the monitoring target line 77a when crossing the pedestrian crossing 3, and the specified passage point is It is assumed that it is the passing point 37 of the user 9 at the entrance 35.
- the control unit 100 determines each of the first entrance 35a and the second entrance 35b based on the movement path 90 indicating that the user 9 has crossed the target pedestrian crossing 3 a plurality of times. , And identify a plurality of passing points 37 respectively corresponding to a plurality of crossings of the user 9. That is, for each of the first entrance 35a and the second entrance 35b, the control unit 100 performs processing for specifying one passing point 37 corresponding to one crossing of the target pedestrian crossing 3 of the user 9 Perform according to each of 9 multiple crossings. Thereby, when the user 9 crosses the object pedestrian crossing 3 multiple times, a plurality of passing points 37 are specified for each of the first entrance 35a and the second entrance 35b.
- FIG. 24 shows an example of the passing point 37 specified by the control unit 100.
- the control unit 100 identifies two passing points 37 at both ends of the plurality of passing points 37 identified for the first entrance 35 a. Then, the control unit 100 sets a line connecting the two specified passing points 37 as an entry line 39 which has a high possibility of entering the crosswalk 3 when a person crosses the target crosswalk 3. Thereby, the first entrance 35 is estimated by a line.
- the approach line 39 can be said to be a line indicating the first entrance 35a.
- the control unit 100 identifies two passing points 37 at both ends among the plurality of passing points 37 identified for the second entrance 35 b. Then, the control unit 100 sets a line connecting the two specified passing points 37 as an entry line 39 which has a high possibility of entering the crosswalk 3 when a person crosses the target crosswalk 3. Thereby, the second entrance 35 is identified by a line.
- the approach line 39 can be said to be a line indicating the second entrance 35 b. In the example of FIG. 24, for each entrance 35, an entry line 39 having a width close to the actual width is identified.
- step s14 when the control unit 100 estimates the first entrance 35a and the second entrance 35b from lines, in step s15, the wireless communication unit 110 receives position information of each entrance 35 of the target pedestrian crossing 3, Data including position information of representative points 30 of the target pedestrian crossing 3 is transmitted to the server device 8.
- position information indicating the positions of both ends of the approach line 39 indicating the first entrance 35 is adopted as the position information of the first entrance 35a. This position information can be said to be specific information for specifying the approach line 39.
- position information indicating positions of both ends of the approach line 39 indicating the second entrance 35b is adopted as the position information of the second entrance 35b.
- the control unit 800 of the server device 8 having received the data from the electronic device 10 is a road including the crosswalk 3 in the storage unit 803 based on the position information of the representative point 30 of the crosswalk 3 included in the data.
- the road information 806 about 70 is specified.
- the control unit 800 sets the position information (position information of both ends of the entry line 39) of each entrance 35 of the pedestrian crossing 3 included in the data from the electronic device 10 to the road identification information of the road information 806 identified.
- the road information 806 is updated by including it.
- the control unit 100 determines that the user 9 is going to exit on the road 7 in step s2, the crosswalk 3 is included in the road 7 in step s3. It is determined based on the road information 806 in the storage unit 103 whether or not it is stored. When the control unit 100 determines that the crosswalk 3 is not included in the roadway 7, it determines that the user 9 who is about to enter the crossroads 7 is not going to enter the crosswalk 3.
- the control unit 100 determines the position information of each entrance 35 of the pedestrian crossing 3 (target pedestrian crossing 3) in the storage unit 103. It is acquired from the road information 806 received from the device 8. Then, based on the position information of each entrance 35 and the position information acquired by the receiving unit 140, the control unit 100 determines whether the user 9 is about to enter the target pedestrian crossing 3. For example, as shown in FIG. 25, the control unit 100 determines the first entrance 35a based on the position information of the first entrance 35a (position information of both ends of the entrance line 39 indicating the first entrance 35a). A rectangular first predetermined area 390 a whose one side is the approach line 39 shown is set outside the target pedestrian crossing 3.
- control unit 100 sets the approach line 39 indicating the second entrance 35b to one side based on the position information of the second entrance 35b (position information of both ends of the approach line 39 indicating the second entrance 35b).
- the second predetermined area 390 b having a rectangular shape is set outside the target pedestrian crossing 3. Then, when the electronic device 10 is present in one of the first predetermined area 390a and the second predetermined area 390b, the control unit 100 determines that the user 9 who is entering the road 7 is the target pedestrian crossing It determines that it is going to enter 3.
- the control unit 100 tries to enter the user 9 who enters the road 7. Determines that it is not going to enter object pedestrian crossing 3.
- crosswalk approach determination may be performed by using the approach line 39 by the method different from the above.
- the approach line 39 with high possibility to approach the said pedestrian crossing 3 is estimated. Even when the width of the pedestrian crossing 3 is large by using the estimated approach line 39 in step s3 of the notification determination process, the user 9 who tries to cross the pedestrian crossing 3 is the pedestrian crossing 3 It is possible to reduce the possibility of being erroneously determined that you are not trying to enter.
- the electronic device 10 since the entry line 39 having a high possibility of entering the pedestrian crossing 3 when a person crosses the pedestrian crossing 3 is estimated, processing using the estimated entry line 39 is The electronic device 10 or another device can do this. Thus, the convenience of the electronic device 10 is improved.
- the entrance estimation process of another example of the present embodiment may be executed not by the electronic device 10 but by the roadside device 5 or may be executed by the server device 8.
- the control unit 500 of the roadside device 5 acquires the position information of the electronic device 10 from the electronic device 10 through the wireless communication unit 510. Then, the control unit 500 specifies the movement route 90 of the user 9 based on the position information of the electronic device 10. Further, in step s11, the control unit 500 acquires road information 806 related to the road 70 including the pedestrian crossing 3 from the server device 8 through the wired communication unit 520.
- Steps s12 to s14 performed by the control unit 500 are the same as steps s12 to s14 of another example of the present embodiment performed by the control unit 100.
- the control unit 500 causes the wired communication unit 520 to provide position information (specific information of the entry line 39) of each entrance 35 of the target pedestrian crossing 3 and the representative point 30 of the target pedestrian crossing 3. And transmits the data including the position information of
- the server device 8 updates the road information 806 in the same manner as described above based on the data from the roadside device 5.
- the control unit 800 of the server device 8 acquires position information of the electronic device 10 from the electronic device 10 through the communication unit 810. Then, the control unit 800 specifies the movement route 90 of the user 9 based on the position information of the electronic device 10. Further, the control unit 800 performs the same process as the entrance estimation process shown in FIG. 14 described above. Specifically, in step s11a, the control unit 800 reads road information 806 related to the road 70 including the pedestrian crossing 3 from the storage unit 803. Next, control unit 800 executes steps s12a to s14a. Steps s12a to s14a performed by the control unit 800 are the same as steps s12 to s14 according to another example of the present embodiment performed by the control unit 100. After step s14a, in step s15a, the control unit 800 includes the position information (specification information of the entry line 39) of each entrance 35 of the target pedestrian crossing 3 in the road identification information of the object road information 806. The road information 806 is updated.
- the server device 8 includes the road 70 including the pedestrian crossing 3 based on the identification information (position information of both ends of the admission line 39) of the entry line 39 for the same pedestrian crossing 3 notified from the plurality of electronic devices 10.
- the road information 806 regarding may be updated.
- the control unit 800 of the server device 8 calculates a disjunction area of the plurality of entry lines 39 based on the identification information of the plurality of entry lines 39 for the same pedestrian crossing 3 notified from the plurality of electronic devices 10 respectively.
- the position information of both ends of the disjunction area is generated.
- the logical sum region of the plurality of entry lines 39 is the outermost end of the plurality of entry lines 39 and the outermost of the other ends of the plurality of entry lines 39.
- the control unit 800 generates position information of both ends of the disjunction area for each entrance 35 of the target pedestrian crossing 3. Then, the control unit 800 updates the target road information 806 by including the position information of both ends of the generated logical sum area in the target road information 806 as the position information of each entrance 35 of the target pedestrian crossing 3.
- control unit 500 of the roadside device 5 is based on the position information of the plurality of entry lines 39 for the same pedestrian crossing 3 notified from the plurality of electronic devices 10, the logical sum region of the plurality of entry lines 39 Position information may be generated.
- the control unit 500 causes the wired communication unit 520 to transmit the position information of the disjunction area corresponding to each entrance 35 of the target pedestrian crossing 3 to the server device 8.
- the control unit 800 of the server device 8 includes the received information of the disjunction area as the position information of each entrance 35 in the road information 806 regarding the road 70 including the target pedestrian crossing 3 in the storage unit 803.
- the roadside device 5 or the server device 8 When the roadside device 5 or the server device 8 performs the entrance estimation process, the roadside device 5 or the server device 8 is based on the device position information notified from the plurality of electronic devices 10 and the road information 806.
- the approach line 39 may be estimated.
- the control unit 500 causes the wireless communication unit 510 to Device position information is acquired from each of the electronic devices 10. Then, the control unit 500 specifies the movement path 90 of the user 9 of each of the plurality of electronic devices 10 based on the acquired device position information. Further, when performing the entrance estimation process, the control unit 500 executes steps s11 to s13 in the same manner as described above. Then, in step s14, the control unit 500 estimates an approach line 39 corresponding to each entrance 35 of the target pedestrian crossing 3, based on the movement paths 90 of the users 9 of the plurality of electronic devices 10.
- step s14 the control unit 500 determines each of the plurality of electronic devices 10 for each of the first entrance 35a and the second entrance 35b based on the movement path 90 of each user 9 of the plurality of electronic devices 10.
- the user 9 specifies the passing point 37 of the entrance 35 when crossing the target pedestrian crossing 3.
- the method of specifying the passing point 37 is the same as described above. Thereby, a plurality of passing points 37 are specified for each of the first entrance 35a and the second entrance 35b, as in FIG. 24 described above.
- control unit 500 specifies a plurality of passing points 37 for each of the first entrance 35a and the second entrance 35b, in the same manner as described above, the control unit 500 for each of the first entrance 35a and the second entrance 35b. An approach line 39 is estimated. Thereafter, the control unit 500 executes step s15 in the same manner as described above.
- the control unit 800 causes the communication unit 810 to transmit the plurality of electronic devices.
- Device position information is acquired from each of the devices 10.
- the control unit 800 specifies the movement path 90 of the user 9 of each of the plurality of electronic devices 10 based on the acquired device position information.
- the control unit 500 executes steps s11a to s13a in the same manner as described above.
- the control unit 800 estimates the approach line 39 based on the movement paths 90 of the users 9 of the plurality of electronic devices 10.
- step s14 the control unit 800 determines each of the plurality of electronic devices 10 for each of the first entrance 35a and the second entrance 35b, based on the movement path 90 of each user 9 of the plurality of electronic devices 10.
- the user 9 specifies the passing point 37 of the entrance 35 when crossing the target pedestrian crossing 3. Thereby, a plurality of passing points 37 are specified for each of the first entrance 35a and the second entrance 35b.
- control unit 800 When the control unit 800 specifies a plurality of passing points 37 for each entrance 35, the control unit 800 estimates the approach line 39 for each entrance 35 in the same manner as described above. Thereafter, the control unit 800 executes step s15a in the same manner as described above.
- the roadside machine 5 or the server device 8 is based on the position information of the passing point 37 (access point) of the person at the entrance 35 of the same pedestrian crossing 3 (target pedestrian crossing 3) specified by the plurality of electronic devices 10. Then, an approach line 39 indicating the entrance 35 may be estimated. That is, the roadside device 5 or the server device 8 crosses the pedestrian crossing 3 based on the position information of the passing point 37 of the person at the entrance 35 of the same pedestrian crossing 3 specified by the plurality of electronic devices 10. When doing, you may estimate the approach line 39 with high possibility to approach the said pedestrian crossing 3. In this case, the roadside device 5 or the server device 8 receives the position information of the passing point 37 of the entrance 35 of the same crosswalk 3 notified from the plurality of electronic devices 10 in the same manner as described above. Find an entry line 39 indicating 35.
- the user 9 is determined whether or not the user 9 is about to enter the pedestrian crossing 3 of the road 7, but it may be determined whether or not the user 9 is about to enter other areas of the road 7 .
- an entry point having a high possibility of entering the pedestrian crossing 3 is estimated, but when the person crosses the carriageway 7, the driveway Another example may be an example of estimating an entry point that is likely to enter 7. For example, when a person on the bicycle crosses the bicycle crossing provided on the road 7, an entry point that is likely to enter the bicycle crossing may be estimated.
- an entry line having a high possibility of entering the pedestrian crossing 3 is estimated, but when the person crosses the carriageway 7, the driveway Another example may be an example of estimating an approach line likely to enter 7. For example, when a person on the bicycle crosses the bicycle crossing provided on the road 7, an approach line that is likely to enter the bicycle crossing may be estimated.
- the electronic device 10 is a mobile phone such as a smartphone, but may be another type of electronic device.
- the electronic device 10 may be, for example, a tablet terminal, a personal computer, a wearable device, or the like.
- the wearable device employed as the electronic device 10 may be of a wristband type, a wristwatch type, or the like attached to an arm, or a headband type, a glasses type, or the like attached to a head. It may be a type worn on the body such as a clothes type.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Traffic Control Systems (AREA)
Abstract
情報処理装置は、携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する第1決定部を備える。
Description
本出願は、日本国出願2017-144467号(2017年7月26日出願)、日本国出願2017-144380号(2017年7月26日出願)及び日本国出願2017-144470号(2017年7月26日出願)の優先権を主張するものであり、当該出願の開示全体を、ここに参照のために取り込む。
本開示は、情報処理装置に関する。
情報処理装置に関して様々な技術が提案されている。
情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造が開示される。一の実施の形態では、情報処理装置は、携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する第1決定部を備える。
また、一の実施の形態では、管理装置は、道路情報を管理する管理装置である。管理装置は、道路情報を記憶する記憶部と、上記の情報処理装置が道路情報に基づいて決定した所定箇所の位置情報に基づいて道路情報を更新する更新部とを備える。
また、一の実施の形態では、制御プログラムは、情報処理装置の動作を制御するための制御プログラムである。制御部プログラムは、情報処理装置に、携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する工程を実行させるためのものである。
また、一の実施の形態では、情報処理装置の動作方法は、携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する工程を備える。
また、一の実施の形態では、データ構造は、横断歩道の代表点の位置情報と、代表点の位置情報に基づいて推定された横断歩道の進入口の位置情報とを含み、道路情報を管理する管理装置の制御部に、代表点の位置情報と進入口の位置情報とに基づいて当該道路情報を更新させるためのものである。
また、一の実施の形態では、情報処理装置は、携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入点を推測する推測部を備える。
また、一の実施の形態では、管理装置は、道路情報を管理する管理装置である。管理装置は、道路情報を記憶する記憶部と、上記の情報処理装置が道路情報に基づいて推定した進入点に基づいて道路情報を更新する更新部とを備える。
また、一の実施の形態では、情報処理装置は、複数の携帯型電子機器と通信可能な情報処理装置である。情報処理装置は、人が車道を横断する際に当該車道へ進入する可能性が高い第1進入点を推測する推測部を備える。複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの第2進入点を特定し、特定した当該第2進入点の位置情報を情報処理装置に送信する。推定部は、複数の携帯型電子機器のそれぞれから送信される第2進入点の位置情報に基づいて第1進入点を推定する。
また、一の実施の形態では、携帯型電子機器は、上記の情報処理装置と通信可能な複数の携帯型電子機器に含まれる携帯型電子機器である。
また、一の実施の形態では、制御プログラムは、情報処理装置の動作を制御するための制御プログラムである。制御プログラムは、情報処理装置に、携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入点を推測する工程を実行させるためのものである。
また、一の実施の形態では、制御プログラムは、複数の携帯型電子機器と通信可能な情報処理装置の動作を制御するための制御プログラムである。複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの第1進入点を特定し、特定した当該第1進入点の位置情報を情報処理装置に送信する。制御プログラムは、情報処理装置に、複数の携帯型電子機器のそれぞれから送信される第1進入点の位置情報に基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する工程を実行させるためのものである。
また、一の実施の形態では、制御プログラムは、複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの第1進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する情報処理装置と通信可能な携帯型電子機器を制御するための制御プログラムである。制御プログラムは、携帯型電子機器に、当該携帯型電子機器の位置情報と道路情報とに基づいて第1進入点を特定する第1工程と、第1工程で特定された第1進入点の位置情報を情報処理装置に送信する第2工程とを実行させるためのものである。
また、一の実施の形態では、情報処理装置の動作方法は、携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入点を推測する工程を備える。
また、一の実施の形態では、情報処理装置の動作方法は、複数の携帯型電子機器と通信可能な情報処理装置の動作方法である。複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの第1進入点を特定し、特定した当該第1進入点の位置情報を情報処理装置に送信する。情報処理装置の動作方法は、複数の携帯型電子機器のそれぞれから送信される第1進入点の位置情報に基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する工程を備える。
また、一の実施の形態では、携帯型電子機器の動作方法は、複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの第1進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する情報処理装置と通信可能な携帯型電子機器の動作方法である。携帯型電子機器の動作方法は、当該携帯型電子機器の位置情報と道路情報とに基づいて第1進入点を特定する第1工程と、第1工程で特定された第1進入点の位置情報を情報処理装置に送信する第2工程とを備える。
また、一の実施の形態では、データ構造は、車道の代表点の位置情報と、携帯型電子機器の位置情報と代表点の位置情報とに基づいて推定された、人が車道を横断する際に当該車道へ進入する可能性が高い進入点の位置情報とを含み、道路情報を管理する管理装置の制御部に、代表点の位置情報と進入点の位置情報とに基づいて当該道路情報を更新させるためのものである。
また、一の実施の形態では、情報処理装置は、携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する推測部を備える。
また、一の実施の形態では、管理装置は、道路情報を管理する管理装置である。管理装置は、道路情報を記憶する記憶部と、上記の情報処理装置が道路情報に基づいて推定した進入線に基づいて道路情報を更新する更新部とを備える。
また、一の実施の形態では、情報処理装置は、複数の携帯型電子機器と通信可能な情報処理装置である。情報処理装置は、人が車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する推測部を備える。複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの進入点を特定し、特定した当該進入点の位置情報を情報処理装置に送信する。推定部は、複数の携帯型電子機器のそれぞれから送信される進入点の位置情報に基づいて進入線を推定する。
また、一の実施の形態では、上記の情報処理装置と通信可能な複数の携帯型電子機器に含まれる携帯型電子機器である。
また、一の実施の形態では、制御プログラムは、情報処理装置の動作を制御するための制御プログラムである。制御プログラムは、情報処理装置に、携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を実行させるためのものである。
また、一の実施の形態では、制御プログラムは、複数の携帯型電子機器と通信可能な情報処理装置の動作を制御するための制御プログラムである。複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの進入点を特定し、特定した当該進入点の位置情報を情報処理装置に送信する。制御プログラムは、情報処理装置に、複数の携帯型電子機器のそれぞれから送信される進入点の位置情報に基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を実行させるためのものである。
また、一の実施の形態では、制御プログラムは、複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推定する情報処理装置と通信可能な携帯型電子機器を制御するための制御プログラムである。制御プログラムは、携帯型電子機器に、当該携帯型電子機器の位置情報と道路情報とに基づいて進入点を特定する第1工程と、第1工程で特定された進入点の位置情報を情報処理装置に送信する第2工程とを実行させるためのものである。
また、一の実施の形態では、情報処理装置の動作方法は、携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を備える。
また、一の実施の形態では、情報処理装置の動作方法は、複数の携帯型電子機器と通信可能な情報処理装置の動作方法である。複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの進入点を特定し、特定した当該進入点の位置情報を情報処理装置に送信する。情報処理装置の動作方法は、複数の携帯型電子機器のそれぞれから送信される進入点の位置情報に基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を備える。
また、一の実施の形態では、携帯型電子機器の動作方法は、複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推定する情報処理装置と通信可能な携帯型電子機器の動作方法である。携帯型電子機器の動作方法は、当該携帯型電子機器の位置情報と道路情報とに基づいて進入点を特定する第1工程と、第1工程で特定された進入点の位置情報を情報処理装置に送信する第2工程とを備える。
また、一の実施の形態では、データ構造は、車道の代表点の位置情報と、携帯型電子機器の位置情報と代表点の位置情報とに基づいて特定された、人が車道を横断したときの複数の進入点に基づいて推定された、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を特定するための特定情報とを含み、道路情報を管理する管理装置の制御部に、代表点の位置情報と特定情報とに基づいて当該道路情報を更新させるためのものである。
図1,2は情報処理システム1の一例を示す図である。情報処理システム1は、例えば、高度道路交通システム(ITS:Intelligent Transport Systems)で使用されるシステムである。具体的には、情報処理システム1は、ITSの安全運転支援通信システムである。安全運転支援通信システムは、安全運転支援システムと呼ばれたり、安全運転支援無線システムと呼ばれたりする。
情報処理システム1は、複数種類の情報処理装置を備える。複数種類の情報処理装置には、携帯型電子機器10、路側機5、車両6に搭載された電子機器及びサーバ装置8が含まれる。以後、携帯型電子機器10を「電気機器10」と呼ぶことがある。
情報処理システム1では、図1に示されるように、交差点2等に配置されている路側機5と、車道7を走る自動車等の車両6と、例えば歩行者であるユーザ9が持つ電子機器10とが、互いに無線通信を行うことが可能である。これにより、路側機5、車両6及び電子機器10は、互いに情報をやり取りすることが可能である。また、複数の車両6は、互いに無線通信を行うことが可能である。これにより、複数の車両6は、互いに情報をやり取りすることが可能である。路側機5と車両6との間の通信、車両6間の通信、路側機5と歩行者の電子機器10との間の通信、歩行者の電子機器10と車両6の間の通信は、それぞれ、路車間通信、車車間通信、路歩間通信、歩車間通信と呼ばれる。
また図2に示されるように、情報処理システム1では、電子機器10、路側機5及びサーバ装置8がネットワーク900に接続されている。ネットワーク900は、例えば、中継装置及びインターネット等を含む。電子機器10及び路側機5のそれぞれは、ネットワーク900を通じてサーバ装置8と通信することが可能である。
電子機器10は、例えば、スマートフォン等の携帯電話機である。電子機器10は、そのユーザ9の状態を特定することが可能である。電子機器10は、特定したユーザ9の状態に関する情報などを路側機5及び車両6等に通知することが可能である。電子機器10の動作については後で詳細に説明する。
路側機5は、例えば、信号機4の点灯に関する情報及び道路規制に関する情報などを車両6及び電子機器10に通知することが可能である。また、路側機5は、その近くの車両6及び歩行者を検知することが可能である。交差点2に配置された路側機5は、例えば、横断歩道3を渡る歩行者を検知することが可能である。そして、路側機5は、検知した車両6及び歩行者に関する情報を、車両6及び電子機器10に通知することが可能である。また、路側機5は、車両6及び電子機器10から通知される情報を、他の車両6及び電子機器10に通知することが可能である。
車両6は、自身の位置、速度及びウィンカーに関する情報などを、他の車両6、路側機5及び電子機器10に対して通知することが可能である。そして、車両6は、他の装置から通知される情報に基づいて警告等の各種通知を運転者に行うことによって、運転者の安全運転を支援することが可能である。車両6は、スピーカ及び表示装置等を利用して、運転者に各種通知を行うことが可能である。車両6は、例えば、当該車両6に搭載されているカーナビゲーション装置を利用して、運転者に各種通知を行うことが可能である。
サーバ装置8は、道路情報及び施設情報などを含む地図情報を管理する。サーバ装置8は、電子機器10、路側機5及び車両6に対して、地図情報を送信することができる。電子機器10及び車両6は、サーバ装置8から地図情報を受け取ると、例えば、受け取った地図情報に基づいて地図等を表示することが可能である。なお、電子機器10及び車両6の少なくとも一方は、サーバ装置8からの地図情報を路側機5を介して受け取ってもよい。
このように、情報処理システム1では、路車間通信、車車間通信、路歩間通信及び歩車間通信が行われることによって、車両6の運転者の安全運転が支援される。
なお図1の例では、車両6として、自動車の車両が示されているが、車両6は、自動車以外の車両であってもよい。例えば、車両6は、バスの車両であってもよいし、路面電車の車両であってもよい。
次に電子機器の外観の一例について説明する。図3及び4は電子機器10の外観の一例を示す斜視図及び背面図である。図3及び4に示されるように、電子機器10は、平面視で略長方形の板状の機器ケース11を備えている。機器ケース11は電子機器10の外装を構成している。
機器ケース11の前面11aには、文字、記号、図形等の各種情報が表示される表示領域12が位置している。表示領域12の背面側には後述するタッチパネル130が位置している。これにより、ユーザ9は、電子機器10の前面の表示領域12を指等で操作することによって、電子機器10に対して各種情報を入力することができる。なお、ユーザ9は、指以外の操作子、例えば、スタイラスペンなどのタッチパネル用ペンで表示領域12を操作することによっても、電子機器10に対して各種情報を入力することができる。
機器ケース11の前面11aの上端部にはレシーバ穴13が位置している。前面11aの下端部にはスピーカ穴14が位置している。機器ケース11の下側の側面11cにはマイク穴15が位置している。
機器ケース11の前面11aの上端部からは、後述する第1カメラ180が有するレンズ181が視認可能となっている。図4に示されるように、機器ケース11の背面11bの上端部からは、後述する第2カメラ190が有するレンズ191が視認可能となっている。
電子機器10は、複数の操作ボタン22から成る操作ボタン群220(後述の図5参照)を備えている。複数の操作ボタン22のそれぞれはハードウェアボタンである。具体的には、複数の操作ボタン22のそれぞれは押しボタンである。なお、操作ボタン群220に含まれる少なくとも一つの操作ボタン22は、表示領域12に表示されるソフトウェアボタンであってもよい。
操作ボタン群220には、機器ケース11の前面11aの下端部に位置する操作ボタン22a,22b,22cが含まれる。また、操作ボタン群220には、機器ケース11の表面に位置する電源ボタン及びボリュームボタンが含まれてもよい。
操作ボタン22aは、例えばバックボタンである。バックボタンは、表示領域12の表示を一つ前の表示に切り替えるための操作ボタンである。ユーザ9が操作ボタン22aを操作することよって、表示領域12の表示が一つ前の表示に切り替わる。操作ボタン22bは、例えばホームボタンである。ホームボタンは、表示領域12にホーム画面を表示させるための操作ボタンである。ユーザ9が操作ボタン22bを操作することよって、表示領域12にホーム画面が表示される。操作ボタン22cは、例えば履歴ボタンである。履歴ボタンは、電子機器10で実行されたアプリケーションの履歴を表示領域12に表示させるための操作ボタンである。ユーザ9が操作ボタン22cを操作することよって、表示領域12には、電子機器10で実行されたアプリケーションの履歴が表示される。
次に電子機器の電気的構成の一例について説明する。図5は電子機器10の電気的構成の一例を主に示すブロック図である。図5に示されるように、電子機器10は、制御部100、無線通信部110、表示部120、操作部210及び衛星信号受信部140を備える。さらに電子機器10は、レシーバ150、スピーカ160、マイク170、第1カメラ180、第2カメラ190、加速度センサ200及び電池230を備える。電子機器10が備えるこれらの構成要素は、機器ケース11内に収められている。
制御部100は、電子機器10の他の構成要素を制御することによって、電子機器10の動作を統括的に管理することが可能である。制御部100は、以下にさらに詳細に述べられるように、種々の機能を実行するための制御及び処理能力を提供するために、少なくとも1つのプロセッサを含む。
種々の実施形態によれば、少なくとも1つのプロセッサは、単一の集積回路(IC)として、又は複数の通信可能に接続された集積回路IC及び/又はディスクリート回路(discrete circuits)として実行されてもよい。少なくとも1つのプロセッサは、種々の既知の技術に従って実行されることが可能である。
1つの実施形態において、プロセッサは、例えば、関連するメモリに記憶された指示を実行することによって1以上のデータ計算手続又は処理を実行するように構成された1以上の回路又はユニットを含む。他の実施形態において、プロセッサは、1以上のデータ計算手続き又は処理を実行するように構成されたファームウェア(例えば、ディスクリートロジックコンポーネント)であってもよい。
種々の実施形態によれば、プロセッサは、1以上のプロセッサ、コントローラ、マイクロプロセッサ、マイクロコントローラ、特定用途向け集積回路(ASIC)、デジタル信号処理装置、プログラマブルロジックデバイス、フィールドプログラマブルゲートアレイ、又はこれらのデバイス若しくは構成の任意の組み合わせ、又は他の既知のデバイス及び構成の組み合わせを含み、以下に説明される機能を実行してもよい。
本例では、制御部100は、CPU(Central Processing Unit)101、DSP(Digital Signal Processor)102及び記憶部103を備える。記憶部103は、ROM(Read Only Memory)及びRAM(Random Access Memory)などの、CPU101及びDSP102が読み取り可能な非一時的な記録媒体を含む。記憶部103が有するROMは、例えば、不揮発性メモリであるフラッシュROM(フラッシュメモリ)である。記憶部103には、電子機器10を制御するための複数の制御プログラム103a等が記憶されている。制御部100の各種機能は、CPU101及びDSP102が記憶部103内の各種制御プログラム103aを実行することによって実現される。
なお制御部100は、複数のCPU101を備えてもよい。また制御部100は、DSP102を備えなくてもよいし、複数のDSP102を備えてもよい。また、制御部100の全ての機能あるいは制御部100の一部の機能は、その機能の実現にソフトウェアが不要なハードウェア回路によって実現されてもよい。
記憶部103は、ROM及びRAM以外の、コンピュータが読み取り可能な非一時的な記録媒体を備えていてもよい。記憶部103は、例えば、小型のハードディスクドライブ及びSSD(Solid State Drive)などを備えていてもよい。
記憶部103内の複数の制御プログラム103aには、様々なアプリケーション(アプリケーションプログラム)が含まれる。記憶部103には、例えば、音声通話及びビデオ通話を行うための通話アプリケーション、ウェブサイトを表示するためのブラウザ、電子メールの作成、閲覧及び送受信を行うためのメールアプリケーションが記憶されている。また記憶部103には、第1カメラ180及び第2カメラ190を利用して被写体を撮影するためのカメラアプリケーション、記憶部103に記録されている静止画及び動画を表示するための記録画像表示アプリケーション、記憶部103に記憶されている音楽データの再生制御を行うための音楽再生制御アプリケーションなどが記憶されている。記憶部103内の少なくとも一つのアプリケーションは、記憶部103内にあらかじめ記憶されているものであってよい。また、記憶部103内の少なくとも一つのアプリケーションは、電子機器10が他の装置からダウンロードして記憶部103内に記憶したものであってよい。
無線通信部110は、アンテナ111を有している。無線通信部110は無線通信回路であるとも言える。無線通信部110は、アンテナ111を用いて、例えば複数種類の通信方式で無線通信することが可能である。無線通信部110の無線通信は、制御部100によって制御される。
無線通信部110は、携帯電話システムの基地局と無線通信することが可能である。無線通信部110は、当該基地局を含むネットワーク900を通じて、電子機器10とは別の情報処理装置、例えば、サーバ装置8、携帯電話機及びウェブサーバ等と通信することが可能である。電子機器10は、他の携帯電話機等と、データ通信、音声通話及びビデオ通話等を行うことが可能である。
また無線通信部110は、路側機5及び車両6と無線通信することが可能である。例えば、無線通信部110は、ITSに割り当てられている700MHz帯を使用して無線通信を行うことが可能である。例えば、無線通信部110は、ITSで利用されるIEEE 802.11pの無線規格に準拠して通信を行うことが可能である。また、無線通信部110は、Wifi等の無線LAN(Local Area Network)を用いて無線通信を行うことが可能である。また無線通信部110は、近距離無線通信を行うことが可能である。例えば、無線通信部110は、Bluetooth(登録商標)に準拠して無線通信することが可能である。無線通信部110は、ZigBee(登録商標)及びNFC(Near Field Communication)の少なくとも一方に準拠して無線通信することが可能であってもよい。
無線通信部110は、アンテナ111で受信した信号に対して増幅処理等の各種処理を行い、処理後の受信信号を制御部100に出力する。制御部100は、入力される受信信号に対して各種処理を行って、当該受信信号に含まれる情報を取得する。また、制御部100は、情報を含む送信信号を無線通信部110に出力する。無線通信部110は、入力される送信信号に対して増幅処理等の各種処理を行って、処理後の送信信号をアンテナ111から無線送信する。
表示部120は、電子機器10の前面に位置する表示領域12と、表示パネル121とを備えている。表示部120は、表示領域12に各種情報を表示することが可能である。表示パネル121は、例えば、液晶表示パネルあるいは有機ELパネルである。表示パネル121は、制御部100によって制御されることによって、文字、記号、図形などの各種情報を表示することが可能である。表示パネル121は、機器ケース11内において、表示領域12と対向している。表示パネル121に表示される情報は表示領域12に表示される。
操作部210は、電子機器10に対するユーザ9の各種操作を受け付けることが可能である。操作部210はタッチパネル130及び操作ボタン群220を備える。
タッチパネル130は、表示領域12に対する指等の操作子による操作を検出することが可能である。これにより、タッチパネル130は、ユーザ9の表示領域12に対する操作を受け付けることができる。タッチパネル130は、例えば、投影型静電容量方式のタッチパネルである。タッチパネル130は、例えば、表示領域12の裏側に位置する。ユーザ9が指等の操作子によって表示領域12に対して操作を行ったとき、その操作に応じた電気信号をタッチパネル130は制御部100に入力することが可能である。制御部100は、タッチパネル130からの電気信号(出力信号)に基づいて、表示領域12に対して行われた操作の内容を特定することが可能である。そして制御部100は、特定した操作内容に応じた処理を行うことが可能である。
操作ボタン群220の各操作ボタン22は、ユーザ9によって操作されると、操作されたことを示す操作信号を制御部100に出力することが可能である。これにより、制御部100は、各操作ボタン22について、当該操作ボタン22が操作されたか否かを判断することができる。操作信号が入力された制御部100が他の構成要素を制御することによって、電子機器10では、操作された操作ボタン22に割り当てられている機能が実行される。
衛星信号受信部140は、測位衛星が送信する衛星信号を受信することが可能である。そして、衛星信号受信部140は、受信した衛星信号に基づいて、電子機器10の位置を示す位置情報を取得することが可能である。衛星信号受信部140が取得する位置情報には、例えば、電子機器10の位置を示す緯度経度が含まれる。制御部100は、衛星信号受信部140を動作させたり、その動作を停止したりすることが可能である。以後、衛星信号受信部140を単に「受信部140」と呼ぶことがある。
受信部140は、例えばGPS受信機であって、GPS(Global Positioning System)の測位衛星からの無線信号を受信することが可能である。受信部140は、受信した無線信号に基づいて電子機器10の現在位置を例えば緯度経度で算出し、算出した緯度経度を含む位置情報を制御部100に出力する。電子機器10の位置情報は、当該電子機器10を持つユーザ9の位置を示す位置情報であるとも言える。
なお受信部140は、GPS以外のGNSS(Global Navigation Satellite System)の測位衛星からの信号に基づいて電子機器10の位置情報を求めてもよい。例えば、受信部140は、GLONASS(Global Navigation Satellite System)、IRNSS(Indian Regional Navigational Satellite System)、COMPASS、Galileoあるいは準天頂衛星システム(QZSS:Quasi-Zenith Satellites System)の測位衛星からの信号に基づいて電子機器10の位置情報を求めてもよい。
マイク170は、電子機器10の外部から入力される音を電気的な音信号に変換して制御部100に出力することが可能である。電子機器10の外部からの音は、マイク穴15から電子機器10の内部に取り込まれてマイク170に入力される。
スピーカ160は、例えばダイナミックスピーカである。スピーカ160は、制御部100からの電気的な音信号を音に変換して出力することが可能である。スピーカ160から出力される音は、スピーカ穴14から外部に出力される。ユーザ9は、スピーカ穴14から出力される音を、電子機器10から離れた場所でも聞こえることが可能である。
レシーバ150は受話音を出力することが可能である。レシーバ150は例えばダイナミックスピーカである。レシーバ150は、制御部100からの電気的な音信号を音に変換して出力することが可能である。レシーバ150から出力される音はレシーバ穴13から外部に出力される。レシーバ穴13から出力される音の音量は、スピーカ穴14から出力される音の音量よりも小さくなっている。ユーザ9は、レシーバ穴13から出力される音を、当該レシーバ穴13に耳を近づけることによって聞くことができる。なお、レシーバ150の代わりに、機器ケース11の前面部分を振動させる、圧電振動素子等の振動素子を設けてもよい。この場合には、音は、当該前面部分の振動によりユーザに伝達される。
第1カメラ180は、レンズ181及びイメージセンサなどを備えている。第2カメラ190は、レンズ191及びイメージセンサなどを備えている。第1カメラ180及び第2カメラ190のそれぞれは、制御部100による制御に基づいて被写体を撮影し、撮影した被写体を示す静止画あるいは動画を生成して制御部100に出力することが可能である。
第1カメラ180のレンズ181は、機器ケース11の前面11aから視認可能となっている。したがって、第1カメラ180は、電子機器10の前面側(表示領域12側)に存在する被写体を撮影することが可能である。第1カメラ180はインカメラと呼ばれる。一方で、第2カメラ190のレンズ191は、機器ケース11の背面11bから視認可能となっている。したがって、第2カメラ190は、電子機器10の背面側に存在する被写体を撮影することが可能である。第2カメラ190はアウトカメラと呼ばれる。
加速度センサ200は、電子機器10の加速度を検出することが可能である。加速度センサ200は例えば3軸加速度センサである。加速度センサ200は、x軸方向、y軸方向及びz軸方向の電子機器10の加速度を検出することが可能である。x軸方向、y軸方向及びz軸方向は、例えば、電子機器10の長手方向、短手方向及び厚み方向にそれぞれ設定される。
電池230は電子機器10の電源を出力することが可能である。電池230は例えば充電式の電池である。電池230から出力される電源は、電子機器10が備える制御部100及び無線通信部110などの各種構成に対して供給される。
なお電子機器10は、加速度センサ200を備えなくてもよい。この場合、電子機器10は、それとは別体の加速度センサと、無線あるいは有線で接続されてよい。
また電子機器10は、加速度センサ200以外のセンサを備えてもよい。例えば、電子機器10は、気圧センサ、地磁気センサ、温度センサ、近接センサ、照度センサ及びジャイロセンサの少なくとも一つを備えてもよい。また電子機器10は、それとは別体の、加速度センサ200以外のセンサと、無線あるいは有線で接続されてもよい。
また電子機器10は、受信部140を備えなくてもよい。この場合、電子機器10は、それとは別体の受信部140と無線あるいは有線で接続されてよい。
次に路側機の構成の一例について説明する。図6は路側機5の構成の一例を示すブロック図である。図6に示されるように、路側機5は、制御部500、無線通信部510、有線通信部520、カメラ530及びセンサ540を備える。
制御部500は、路側機5の他の構成要素を制御することによって、路側機5の動作を統括的に管理することが可能である。制御部500は、以下にさらに詳細に述べられるように、種々の機能を実行するための制御及び処理能力を提供するために、少なくとも1つのプロセッサを含む。電子機器10の制御部100が備えるプロセッサについての上記の説明は、制御部500が備えるプロセッサについても言える。
本例では、制御部500は、CPU501、DSP502及び記憶部503を備える。記憶部503は、ROM及びRAMなどの、CPU501及びDSP502が読み取り可能な非一時的な記録媒体を含む。記憶部503が有するROMは、例えば、不揮発性メモリであるフラッシュROMである。記憶部503には、路側機5を制御するための複数の制御プログラム503a等が記憶されている。制御部500の各種機能は、CPU501及びDSP502が記憶部503内の各種制御プログラム503aを実行することによって実現される。
記憶部503は、電子機器10の記憶部103と同様に、ROM及びRAM以外の、コンピュータが読み取り可能な非一時的な記録媒体を備えていてもよい。記憶部503内の少なくとも一つの制御プログラム503aは、記憶部503内にあらかじめ記憶されているものであってよい。また、記憶部503内の少なくとも一つの制御プログラム503aは、路側機5が他の装置からダウンロードして記憶部503内に記憶したものであってよい。また、制御部500の全ての機能あるいは制御部500の一部の機能は、その機能の実現にソフトウェアが不要なハードウェア回路によって実現されてもよい。
無線通信部510は、アンテナ511を有している。無線通信部510は、アンテナ511を使用して、車両6(詳細には車両6内の電子機器)及び電子機器10と無線通信することが可能である。無線通信部510は、例えば、ITSに割り当てられている700MHz帯を使用して無線通信を行うことが可能である。無線通信部510は、ITSで利用されるIEEE 802.11pの無線規格に準拠して通信してもよい。
無線通信部510は、アンテナ511で受信した信号に対して増幅処理等の各種処理を行い、処理後の受信信号を制御部500に出力する。制御部500は、入力される受信信号に対して各種処理を行って、当該受信信号に含まれる情報を取得する。また、制御部500は、情報を含む送信信号を無線通信部510に出力する。無線通信部510は、入力される送信信号に対して増幅処理等の各種処理を行って、処理後の送信信号をアンテナ511から無線送信する。
なお無線通信部510は、Wifi等の無線LAN(Local Area Network)を用いて車両6及び電子機器10と無線通信を行うことが可能であってもよい。
有線通信部520は、ネットワーク900と有線で接続されている。有線通信部520は、ネットワーク900を通じて、当該ネットワーク900に接続された装置、例えばサーバ装置8と通信することが可能である。有線通信部520は、ネットワーク900から受け取った情報を制御部500に入力することが可能である。また有線通信部520は、制御部500から受け取った情報をネットワーク900に出力することが可能である。
カメラ530は、路側機5が設置された場所の様子、本例では交差点2の様子を撮影することが可能である。カメラ530で生成された、交差点2の様子が写る画像は制御部500に入力される。カメラ530は、動画及び静止画を撮影することが可能である。制御部500は、例えば無線通信部510に、カメラ530から受け取った画像を電子機器10及び車両6に送信させることが可能である。また制御部500は、カメラ530から受け取った画像を解析して、交差点2に存在する歩行者(例えば電子機器10のユーザ9)及び車両6を検知することが可能である。制御部500は、例えば無線通信部510に、検知した歩行者及び車両6に関する情報を車両6及び電子機器10に送信させることが可能である。
センサ540は、路側機5が設置された場所の状況、本例では交差点2の状況を検知することが可能である。センサ540は、例えば、3Dレーザースキャナ及び赤外線センサ等を備えている。センサ540は、例えば、交差点2に存在する歩行者9及び車両6を検知することが可能である。センサ540は、検知結果を制御部500に出力する。制御部500は、センサ540からの検知結果等に基づいて各種処理を行う。例えば、制御部500は、無線通信部510に、センサ540での検知結果を電子機器10及び車両6に送信させる。また制御部500は、センサ540からの検知結果と、カメラ530から受け取った画像に対する解析結果とに基づいて、電子機器10に通知する通知情報及び車両6に通知する通知情報を生成する。そして制御部500は、生成した通知情報に無線通信部510に送信させる。センサ540の構成は上記の限りではない。
なお路側機5は、ネットワーク900と無線通信することが可能であってもよい。また路側機5は、近距離無線通信を行うことが可能であってもよい。例えば、路側機5は、Bluetoothに準拠して無線通信することが可能であってもよい。
次にサーバ装置8の構成の一例について説明する。図7はサーバ装置8の構成の一例を示すブロック図である。図7に示されるように、サーバ装置8は、制御部800及び通信部810を備える。
制御部800は、サーバ装置8の他の構成要素を制御することによって、サーバ装置8の動作を統括的に管理することが可能である。制御部800は、以下にさらに詳細に述べられるように、種々の機能を実行するための制御及び処理能力を提供するために、少なくとも1つのプロセッサを含む。電子機器10の制御部100が備えるプロセッサについての上記の説明は、制御部800が備えるプロセッサについても言える。
本例では、制御部800は、CPU801、DSP802及び記憶部803を備える。記憶部803は、ROM及びRAMなどの、CPU801及びDSP802が読み取り可能な非一時的な記録媒体を含む。記憶部803が有するROMは、例えば、不揮発性メモリであるフラッシュROMである。記憶部803には、サーバ装置8を制御するための複数の制御プログラム804及び地図情報805等が記憶されている。制御部800の各種機能は、CPU801及びDSP802が記憶部803内の各種制御プログラム804を実行することによって実現される。
記憶部803は、電子機器10の記憶部103と同様に、ROM及びRAM以外の、コンピュータが読み取り可能な非一時的な記録媒体を備えていてもよい。記憶部803内の少なくとも一つの制御プログラム804は、記憶部803内にあらかじめ記憶されているものであってよい。また、記憶部803内の少なくとも一つの制御プログラム804は、サーバ装置8が他の装置からダウンロードして記憶部803内に記憶したものであってよい。また、制御部800の全ての機能あるいは制御部800の一部の機能は、その機能の実現にソフトウェアが不要なハードウェア回路によって実現されてもよい。
通信部810は、有線あるいは無線でネットワーク900に接続されている。通信部810は、ネットワーク900を通じて、当該ネットワーク900に接続された装置、例えば電子機器10及び路側機5と通信することが可能である。通信部810は、ネットワーク900から受け取った情報を制御部800に入力することが可能である。また通信部810は、制御部800から受け取った情報をネットワーク800に出力することが可能である。
制御部800は地図情報805を管理することが可能である。制御部800は、通信部810が受信する情報等に基づいて地図情報805を更新することが可能である。地図情報805には、日本国内の道路に関する道路情報806が含まれる。ここで、道路とは、車道及び歩道を含む用語である。道路情報806には、日本以外の国の道路に関する情報が含まれてもよい。地図情報805には、道路情報806以外の情報、例えば施設情報などが含まれる。
道路情報806には、例えば、道路を特定するための道路特定情報及び道路間の接続関係を特定するための情報などが含まれる。道路を特定するための道路特定情報には、例えば、当該道路の種別(例えば、国道であるのか県道であるのかなど)を示す道路種別情報、当該道路に設定されたノード(節点)を特定するためのノード特定情報及び当該道路に含まれる車道に設定された横断歩道の位置を示す横断歩道位置情報が含まれる。道路に設定されたノードは代表点であるとも言える。ノード特定情報には、ノードを識別するための識別情報及びノードの位置を示すノード位置情報などが含まれる。横断歩道位置情報は、例えば、横断歩道に設定された代表点の位置(例えば、座標)を示す。代表点は、例えば、横断歩道の中心に設定される。また、道路を特定するための道路特定情報には、当該道路に含まれる車道の車線数、当該車道での法定速度及び当該車道に中央帯が存在するか否かを示す中央帯情報などが含まれる。中央帯情報には、中央帯の幅等に関する情報も含まれる。
なおサーバ装置8は、制御部800及び通信部810以外の構成を備えてもよい。サーバ装置8は、例えば、液晶ディスプレイ装置等の表示装置を備えてもよい。またサーバ装置8は、タッチパネル等の、ユーザがサーバ装置8に情報を入力するための入力装置を備えてもよい。
次に電子機器の動作の一例について説明する。
図1において、電子機器10のユーザ9が、車道7における、横断歩道3が存在しない領域に出ようとする行為は、安全な行為とは言えない。したがって、この場合に、電子機器10が周囲に対して通知を行うことは有効である。
一方で、ユーザ9が車道7に出ようとする行為であっても、ユーザ9が車道7に設けられた横断歩道3に進入しようとする行為であれば、その行為は比較的安全な行為であると言える。したがって、この場合に、電子機器10が周囲に対して通知を行う必要はあまりないと言える。
このように、ユーザ9の状態(言い換えると、ユーザ9の行為)によっては、電子機器10が周囲に対して通知を行うことが有効であることもあれば、電子機器10が周囲に対して通知を行う必要があまりないこともある。
そこで、本例では、電子機器10の制御部500は、ユーザ9の状態を特定し、その特定結果に基づいて、電子機器10の外部に対して当該電子機器10が通知を行うか否かを決定する通知決定処理を行う。以下に、通知決定処理の一例について詳細に説明する。以後、電子機器10の外部に電子機器10が通知を行うことを「外部通知」と呼ぶことがある。また、車道7における、横断歩道3が存在しない領域を「横断歩道外領域」と呼ぶことがある。また、説明の対象の道路情報806及び横断歩道3をそれぞれ「対象道路情報806」及び「対象横断歩道3」と呼ぶことがある。
図8は通知決定処理の一例を示す図である。図8に示される通知決定処理は繰り返し実行される。
図8に示されるように、ステップs1において、制御部100は、無線通信部110を通じて、サーバ装置8から、電子機器10の現在位置の周辺の道路に関する道路情報806を取得する。制御部100は、取得した道路情報806を記憶部103に記憶する。ステップs1において、制御部100は、無線通信部110に、受信部140で取得される位置情報をサーバ装置8に送信させる。サーバ装置8の制御部800は、電子機器10からの位置情報に基づいて、電子機器10の現在位置の周辺の道路に関する道路情報806を記憶部803内の地図情報805から取得する。そして、制御部800は、通信部810に、取得した道路情報806を電子機器10に送信させる。これにより、電子機器10は、サーバ装置8から、当該電子機器10の現在位置の周辺の道路に関する道路情報806を取得することができる。
次にステップs2において、制御部100は、受信部140で取得される電子機器10の位置情報と、ステップs1で取得した記憶部103内の対象道路情報806とに基づいて、ユーザ9が車道7に出ようとしているか否かを判定する。ステップs2では、制御部100は、例えば、電子機器10の位置情報及び対象道路情報806に基づいて、電子機器10が車道7の非常に近くに(例えば1m以内に)存在するという第1条件を満たすか否かを判定する。制御部100は、第1条件を満たすと判定すると、電子機器10の非常に近くにいる車道7に向かって電子機器10が進んでいるという第2条件を満たすか否かを、電子機器10の位置情報及び対象道路情報806に基づいて判定する。制御部100は、第1条件及び第2条件を満たすと判定すると、ユーザ9が車道7に出ようとしていると判定する。一方で、制御部100は、第1条件を満たさないと判定した場合、ユーザ9が車道7に出ようとしていないと判定する。また、制御部100は、第2条件を満たさないと判定した場合、ユーザ9が車道7に出ようとしていないと判定する。
制御部100は、ステップs2において、ユーザ9が車道7に出ようとしていないと判定すると、通知決定処理を終了する。一方で、制御部100は、ステップs2において、ユーザ9が車道7に出ようとしていると判定すると、ステップs3において、ユーザ9が横断歩道3に進入しようとしているか否かを判定する。ステップs3での処理は後で詳細に説明する。ステップs3での処理を「横断歩道進入判定」と呼ぶことがある。
制御部100は、ステップs3において、ユーザ9が横断歩道3に進入しようとしていると判定すると、ステップs4において、電子機器10が外部通知を行わないことを決定する。一方で、制御部100は、ステップs3において、ユーザ9が横断歩道3に進入しようとしていないと判定すると、つまり、ユーザ9が横断歩道外領域に出ようとしていると判定すると、ステップs5において、電子機器10が外部通知を行うことを決定する。
ステップs5において、電子機器10が外部通知を行うことが決定されると、制御部100は、ユーザ9が車道7に出ようとしていることを通知するための通知情報を生成する。そして、制御部100は、無線通信部110に、生成した通知情報を送信させる。この通知情報は、電子機器10の周辺の車両6に直接通知されてもよし、路側機5を通じて車両6に通知されてもよい。通知情報を受信した車両6は、例えば、カーナビゲーション装置に、近くで歩行者の車道7への飛び出しがあることを運転者に通知するための警告情報を表示したり、カーナビゲーション装置から警告音を出力したりする。
このように、本例では、電子機器10は、ユーザ9が横断歩道3に進入しようとする場合、言い換えれば、ユーザ9が横断歩道3を横断しようとする場合、外部通知を行わないことを決定するため、電子機器10が必要性に乏しい通知を行う可能性を低減することができる。また、車両6が電子機器10からの必要性に乏しい通知を受信する可能性を低減することができる。
なお、横断歩道3に歩行者用信号機が設置され、路側機5が横断禁止情報を送信する場合がある。横断禁止情報とは、歩行者用信号機が横断歩道3の横断を禁止することを示す情報である。この場合には、電子機器10は路側機5から横断禁止情報を受信するとき、ユーザ9が横断歩道3に進入しようとしていると判定したとしても、外部通知を行ってもよい。横断禁止情報は、例えば、歩行者用信号機が赤信号を発していることを示す情報を含む。横断禁止情報は、歩行者用信号機が黄色信号を発していることを示す情報を含んでもよい。
次に横断歩道進入判定の一例について説明する。
上述のように、サーバ装置8が記憶する道路情報806には、横断歩道位置情報が含まれている。制御部100は、ステップs3において、記憶部103内の道路情報806に含まれる横断歩道位置情報に基づいて、ユーザ9が横断歩道3に進入しようとしているか否かを判定することが可能である。例えば図9に示されるように、制御部100は、受信部140で得られる位置情報に基づいて、横断歩道位置情報が示す代表点30から半径所定距離の範囲31内にユーザ9が位置するか否かを判定する。制御部100は、範囲31内にユーザ9が位置しない場合には、ユーザ9が横断歩道3に進入しようとしていないと判定する。一方で、制御部100は、範囲31内にユーザ9が位置する場合には、ユーザ9が横断歩道3に進入しようとしていると判定する。なお図9には、道路70に含まれる歩道71から横断歩道3に進入しようとするユーザ9(言い換えると、横断歩道3を横断しようとするユーザ9)が示されている。
このように、制御部100は、横断歩道位置情報に基づいて、ユーザ9が横断歩道3に進入しようとしているか否かを判定することは可能である。しかしながら、この場合には、横断歩道3の長さによっては、制御部100は、ユーザ9が横断歩道3に進入しようとしているか否かを適切に判定することができない可能性がある。
例えば、図10に示されるように、車道7の幅が大きく、車道7に長い横断歩道3が設けられている場合には、横断歩道3の代表点30から半径所定距離の範囲31が歩道71まで届かない可能性がある。この場合、制御部100は、ユーザ9が横断歩道3を渡り始めた後に、ユーザ9が横断歩道3に進入しようとしていると判定する可能性がある。その結果、制御部100は、ステップs3の横断歩道進入判定において、ユーザ9が横断歩道3に進入しようとしているか否かを適切に判定できない可能性がある。その結果、ユーザ9が実際には横断歩道3に進入しているにもかかわらず、電子機器10が外部通知を行う可能性があり、不要な通知が電子機器10から周囲に送信される可能性がある。
そこで、本例では、制御部100は、道路情報806に基づいて、人が横断歩道3を横断する際の進入口を推定する進入口推定処理を行う。そして、制御部100は、ステップs3において、電子機器10の位置情報と、推定した横断歩道3の進入口とに基づいて、ユーザ9が横断歩道3に進入しようとしているか否かを判定する。なお、横断歩道3の進入口は、人が当該横断歩道3から出る際の退出口であるとも言える。また、横断歩道3の進入口は、当該横断歩道3の出入口であるとも言える。以下に、進入口推定処理の一例について説明する。
上述のように、道路情報806には、道路70に設定されたノード75の位置を示す位置情報が含まれる。図11は、道路70に設定されたノード75の一例を示す図である。ノード75は、例えば、道路70の両端にそれぞれ設定される。ノード75は、例えば、道路70の幅方向の中心に設定される。本例に係る進入口推定処理では、横断歩道3を含む道路70に設定されたノード75の位置情報と、当該横断歩道3の代表点30の位置情報(横断歩道位置情報)とが使用されて、当該横断歩道3の進入口35が推定される。例えば、横断歩道3の進入口35の代表点36が決定されることによって、当該横断歩道3の進入口35が推定される。人は、横断歩道3の長手方向の両端のそれぞれから進入することが可能であることから、進入口推定処理では、横断歩道3について、一方の進入口35とそれとは反対側の進入口35とが推定される。以後、横断歩道3についての2つの進入口35を、「第1進入口35a」及び「第2進入口35b」と呼ぶことがある。
図12は進入口推定処理の一例を説明するための図である。図13は進入口推定処理の一例を示すフローチャートである。進入口推定処理は、例えば、上述の通知決定処理と並行して実行される。進入口推定処理は繰り返し実行される。
図13に示されるように、ステップs11において、制御部100は、記憶部103から、横断歩道3を含む道路70に関する道路情報806(対象道路情報806)を取得する。制御部100は、例えば、上述のステップs1の実行により、記憶部103に記憶されたサーバ装置8からの道路情報806から、横断歩道3を含む道路70に関する道路情報806を取得する。以後、対象道路情報806が示す情報に対応する道路70を「対象道路70」と呼ぶことがある。
次にステップs12において、制御部100は、ステップs11で取得した対象道路情報806に基づいて、対象道路70の車道7の幅d1を求める(図12参照)。例えば、制御部100は、対象道路情報806の道路特定情報に含まれる道路種別情報、車線数及び中央帯情報に基づいて対象道路70の車道7の幅d1を推定することによって、車道7の幅d1を求める。対象道路70の種別(例えば、国道であるのか県道であるのかなど)、車線、中央帯の有無及び中央帯の幅に応じて対象道路70の車道7の幅が変化する。したがって、制御部100は、道路種別情報、車線数及び中央帯情報に基づいて車道7の幅d1をある程度の精度で推定することができる。例えば、道路種別情報と、車線数と、中央帯情報と、車道7の幅d1とが対応付けられたテーブルが記憶部103に記憶されている場合を考える。この場合には、制御部100は、当該テーブルに基づいて、車道7の幅d1を求めることができる。なお、対象道路情報806に、対象道路70の車道7の幅を示す車道幅情報が含まれている場合には、その車道幅情報が示す幅が使用されてもよい。
次にステップs13において、制御部100は、対象道路情報806に基づいて、対象道路70の延在方向(言い換えると、対象道路70が延びる方向)を特定する。例えば、制御部100は、対象道路情報806に含まれる、対象道路70の両端にそれぞれ設定された2つのノード75(図12参照)の位置情報に基づいて、当該2つのノード75を結ぶ方向を特定し、特定した方向を対象道路70の延在方向76(図12参照)とする。
次にステップs14において、制御部100は、ステップs12で求めた車道7の幅d1と、ステップs13で特定した延在方向76と、対象道路情報806に含まれる、対象道路70に設けられた横断歩道3(対象横断歩道3)の代表点30の位置情報(横断歩道位置情報)とに基づいて、当該横断歩道3の進入口35を推定する。
ステップs14では、制御部100は、例えば、対象道路70の延在方向76に対して垂直な方向176(図12参照)を特定する。次に制御部100は、対象横断歩道3の代表点30から、特定した方向176に沿って、車道7の幅d1の2分の1だけ離れた点36を特定する。ここで、図12に示されるように、対象横断歩道3の代表点30から、特定した方向176に沿って、車道7の幅d1の2分の1だけ離れた点36は2つ存在する。制御部100は、2つの点36のうちの一方の点36を、対象横断歩道3の長手方向の一方端の進入口35の代表点36とする。そして、制御部100は、2つの点36のうちの他方の点36を、対象横断歩道3の長手方向の他方端の進入口35の代表点36とする。これにより、対象横断歩道3の長手方向の両端に位置する第1進入口35a及び第2進入口35bが推定される。制御部100は、各進入口35について、当該進入口35の代表点36の位置を示す位置情報を当該進入口35の位置情報として生成する。
次にステップs15において、制御部100は、無線通信部110に、対象横断歩道3の各進入口35の位置情報と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。これにより、進入口推定処理が終了する。次の進入口推定処理では、前回の進入口推定処理で進入口が推定された横断歩道3とは別の横断歩道3の進入口が推定される。
サーバ装置8は、電子機器10から受け取ったデータに基づいて、記憶部803内の道路情報806を更新する。具体的には、サーバ装置8の制御部800は、電子機器10からのデータに含まれる、横断歩道3の代表点30の位置情報に基づいて、記憶部803内の、当該横断歩道3を含む道路70に関する道路情報806を特定する。そして、制御部800は、電子機器10からのデータに含まれる、横断歩道3の各進入口35の代表点36の位置情報を、特定した道路情報806の道路特定情報に含めることによって、当該道路情報806を更新する。進入口推定処理が行われた横断歩道3を含む道路70に関する道路情報806がサーバ装置8から電子機器10に送信される際には、当該横断歩道3の各進入口35の代表点36の位置情報を含む道路情報806が送信される。
以上のようにして、電子機器10は、道路情報806に基づいて横断歩道3の第1進入口35a及び第2進入口35bを推定し、それらの位置情報を生成する。そして、電子機器10で生成された、第1進入口35a及び第2進入口35bの位置情報は、サーバ装置8が記憶する道路情報806に含められる。
上述の通知決定処理において、制御部100は、ステップs2でユーザ9が車道7に出ようとしていると判定すると、ステップs3において、その車道7を対象車道7とし、対象車道7に横断歩道3が含まれているか否かを、記憶部103内の道路情報806に基づいて判定する。制御部100は、対象車道7に横断歩道3が含まれていないと判定すると、対象車道7に進入しようとしているユーザ9は横断歩道3には進入しようとしていないと判定する。
一方で、制御部100は、対象車道7に横断歩道3が含まれていると判定すると、その横断歩道3(対象横断歩道3)の第1進入口35a及び第2進入口35bの位置情報を、記憶部103内の、サーバ装置8から受け取った道路情報806から取得する。上述のように、電子機器10で生成された第1進入口35a及び第2進入口35bの位置情報は、サーバ装置8が記憶する道路情報806に含められる。したがって、制御部100は、対象横断歩道3の第1進入口35a及び第2進入口35bの位置情報を、記憶部103内の、サーバ装置8からの道路情報806から取得することができる。そして、制御部100は、第1進入口35a及び第2進入口35bの位置情報と、受信部140で取得される位置情報とに基づいて、対象横断歩道3にユーザ9が進入しようとしているか否かを判定する。制御部100は、例えば、第1進入口35aの代表点36から半径所定距離の範囲内に電子機器10が存在する場合には、車道7に進入しようとしているユーザ9は、対象横断歩道3に進入しようとしていると判定する。また、制御部100は、第2進入口35bの代表点36から半径所定距離の範囲内に電子機器10が存在する場合には、車道7に進入しようとしているユーザ9は、対象横断歩道3に進入しようとしていると判定する。一方で、制御部100は、第1進入口35aの代表点36から半径所定距離の範囲内に電子機器10が存在せず、かつ第2進入口35bの代表点36から半径所定距離の範囲内に電子機器10が存在しない場合には、車道7に進入しようとしているユーザ9は、対象横断歩道3には進入しようとしていないと判定する。
なおステップs3において、制御部100は、記憶部103内の、サーバ装置8から受け取った道路情報806から、対象横断歩道3の各進入口35の位置情報を取得することができない場合には、当該道路情報806に基づいて進入口推定処理を行って、対象横断歩道3の各進入口35の位置情報を生成してもよい。あるいは、制御部100は、対象横断歩道3の代表点30の位置情報に基づいて、ユーザ9が対象横断歩道3に進入しようとしているか否かを判定してもよい。この場合には、例えば、上述の図9に示されるように、制御部100は、受信部140で得られる位置情報に基づいて、対象横断歩道3の代表点30から半径所定距離の範囲31内にユーザ9が位置するか否かを判定する。制御部100は、範囲31内にユーザ9が位置しない場合には、ユーザ9が横断歩道3に進入しようとしていないと判定する。一方で、制御部100は、範囲31内にユーザ9が位置する場合には、ユーザ9が横断歩道3に進入しようとしていると判定する。
このように、本例では、制御部100は、自身の位置情報と、車道7上の所定箇所(上記の例では、車道7における、横断歩道3の進入口)の位置情報とに基づいて、外部通知を行うか否かを決定している。そして、制御部100は、外部通知を行うか否かの決定で使用される車道7上の所定箇所を、道路情報806に基づいて決定している。これにより、ユーザ9は、道路情報806に基づいて決定された車道7上の所定箇所を利用して、外部通知を行うか否かを決定する電子機器10を利用することができる。よって、電子機器10の利便性が向上する。
また制御部100は、人が車道7を横断する際の進入口を推定し、推定した進入口を、外部通知を行うか否かの決定で利用される車道7上の所定箇所としている。上記の例では、制御部100は、人が横断歩道3を横断する際の進入口35を推定し、推定した進入口35を、外部通知を行うか否かの決定で利用される車道7上の所定箇所としている。これにより、電子機器10は、自身の位置情報と、横断歩道3の進入口の位置情報とを利用して外部通知を行うか否かを決定することができる。例えば、上記のように、電子機器10は、自身の位置情報と、横断歩道3の進入口35の位置情報とに基づいて、ユーザ9が横断歩道に進入しようとしているか否かを判定し、その判定結果に基づいて外部通知を行うか否かを決定することができる。
また上記の例では、横断歩道3の進入口35の位置情報として、進入口35の代表点36の位置情報が使用されていることから、進入口35の位置情報のデータ量を低減することができる。よって、電子機器10でのデータ処理量を低減することができる。
なお電子機器10は、上記の通知決定処理において、ステップs4の代わりに、人が横断歩道3を横断しようとしていることを通知するための通知情報を周囲に通知する処理を行ってもよい。この場合、電子機器10は、当該通知情報を、路側機5に送信してもよいし、周囲の車両6に通知してもよい。前者の場合、路側機5は、例えば、電子機器10から受けとった通知情報を周囲の車両6に送信する。通知情報を受け取った車両6は、例えば、人が横断歩道3を横断しようとしていることを、表示あるいは音などを利用して運転者に通知する。これにより、運転者は、横断歩道3を横断しようとする人に注意しながら車両6を運転することができる。
また電子機器10は、通知決定処理のステップs3の処理の中で、進入口推定処理のステップs12~s14を実行して、対象横断歩道3の各進入口35の位置情報を取得してもよい。この場合、ステップs4の後と、ステップs5の後に、ステップs15が実行される。
また上記の例では、推定された横断歩道3の進入口35は、人が当該横断歩道3に進入しようとしているか否かの判定で利用されているが、他の目的で利用されてもよい。
例えば、ユーザ9が子供である場合、推定された横断歩道3の進入口35は、横断歩道3の手前での子供の行動の確認に利用することができる。この場合、電子機器10は、それ自身の位置情報と、横断歩道3の進入口35の位置情報とに基づいて、当該横断歩道3手前でのユーザ9(例えば、子供)の行動を判定する。例えば、電子機器10は、ユーザ9(例えば、子供)が横断歩道3の手前で停止しているか否かを、電子機器10の位置情報と、推定した横断歩道3の進入口35の位置情報とに基づいて判定する。また電子機器10は、ユーザ9が横断歩道3の手前で移動速度を低減しているか否かを、電子機器10の位置情報と、推定した横断歩道3の進入口35の位置情報とに基づいて判定する。電子機器10は、横断歩道3手前でのユーザ9の行動を判定すると、その判定結果を、ユーザ9である子供の親が所有する電子機器10に電子メール等を利用して送信してもよい。判定結果を受け取った親の電子機器10は、その判定結果を例えば表示する。これにより、親は、自身が所有する電子機器10を利用して、子供が安全に行動しているか否かを確認することができる。
なお、子供が所有する電子機器10は、当該電子機器10の位置情報と、推定した進入口35の位置情報とを親が所有する電子機器10に送信してもよい。この場合、親が所有する電子機器10が、受け取った位置情報に基づいて、横断歩道3手前での子供の行動を判定してもよい。また、子供が所有する電子機器10は、当該電子機器10の位置情報と、推定した進入口35の位置情報とを、路側機5あるいはサーバ装置8に送信してもよい。この場合、路側機5あるいはサーバ装置8が、受け取った位置情報に基づいて、横断歩道3手前での子供の行動を判定し、その判定結果を、親が所有する電子機器10に送信してもよい。
また、進入口推定処理は、電子機器10ではなく路側機5で実行されてもよいし、サーバ装置8で実行されてもよい。路側機5が進入口推定処理を行う場合には、ステップs11において、路側機5の制御部500は、有線通信部520を通じて、サーバ装置8から横断歩道3を含む道路70に関する道路情報806を取得する。制御部500で行われるステップs12~s14は、制御部100で行われる上述のステップs12~s14と同様である。ステップs14の後、制御部500は、ステップs15において、有線通信部520に、対象横断歩道3の各進入口35の位置情報と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。サーバ装置8は、路側機5からのデータに基づいて、上記と同様にして道路情報806を更新する。
図14はサーバ装置8が行う進入口推定処理の一例を示すフローチャートである。図14に示されるように、ステップs11aにおいて、サーバ装置8の制御部800は、記憶部803から、横断歩道3を含む道路70に関する道路情報806を読み出す。次に、制御部800はステップs12a~s14aを実行する。制御部800で行われるステップs12a~s14aは、制御部100で行われる上述のステップs12~s14とそれぞれ同様である。ステップs14aの後、制御部800は、ステップs15aにおいて、対象横断歩道3の各進入口35の位置情報を、対象道路情報806の道路特定情報に含めることによって、対象道路情報806を更新する。
以下に情報処理システム1の他の一例について説明する。
上述の図11,12に示されるように、横断歩道3の延在方向が、当該横断歩道3を含む道路70の延在方向76に対して垂直である場合には、電子機器10で推定される、当該横断歩道3の進入口35の代表点36の位置は、実際の進入口35の中心の近くとなる。
一方で、道路70によっては、当該道路70の延在方向76に対して、その延在方向が垂直な方向とはならない横断歩道3が存在する場合がある。図15には、当該横断歩道3が示されている。図15に示される横断歩道3Aの延在方向38は、横断歩道3Aが設けられた車道7Aを含む道路70Aの延在方向76に対して垂直となっていない。このような横断歩道3Aの進入口35の代表点36を上記のようにして設定すると、設定された代表点36は、図15に示されるように、実際の進入口35の中心から大きく離れる可能性がある。横断歩道3の実際の進入口35の中心から大きく離れた場所から、人が進入して当該横断歩道3を横断する可能性は低いことから、電子機器10が設定した代表点36の近くにユーザ9が存在する場合であっても、そのユーザ9は横断歩道3に進入しない可能性がある。よって、電子機器10は、設定した代表点36の位置情報に基づいて、ユーザ9が横断歩道3に進入しようとしているか否かを正しく判定できない可能性がある。
そこで、本実施形態の他の一例では、電子機器10は、上述のようにして設定された進入口35の代表点36の位置を、電子機器10の位置情報に基づいて補正する補正処理を行うことによって、横断歩道3の進入口35において人が進入する可能性が高い進入点を推定する。そして、電子機器10は、推定した、人が進入する可能性が高い進入点の位置情報に基づいて、ユーザ9が横断歩道3に進入しようとしているか否かを判定する。これにより、電子機器10は、ユーザ9が横断歩道3に進入しようとしているか否かをより正しく判定することができる。
図16は、本実施形態に係る補正処理の一例を示すフローチャートである。図17は、本実施形態に係る補正処理の一例を説明するための図である。図16に示される補正処理は、例えば、上述の通知決定処理及び進入口推定処理と並行して実行してよい。補正処理は繰り返し実行してよい。
図16に示されるように、ステップs21において、制御部100は、上述のステップs1と同様にして、無線通信部110を通じて、サーバ装置8から、電子機器10の現在位置の周辺の道路に関する道路情報806を取得する。そして、制御部100は、取得した道路情報806を記憶部103に記憶する。
次にステップs22において、制御部100は、ステップs21で取得した対象道路情報806に基づいて、ユーザ9が横断歩道3に進入しようとしているか否かを判定する。以下にステップs22について詳細に説明する。
ステップs22において、制御部100は、ステップs21で取得した対象道路情報806に基づいて、電子機器10の現在の位置に最も近い横断歩道3を特定する。制御部100は、道路情報806に含まれる横断歩道位置情報と、受信部140で取得される位置情報とに基づいて、電子機器10の現在の位置に最も近い横断歩道3を特定することができる。
次に制御部100は、特定した対象横断歩道3の各進入口35の代表点36の位置情報を、記憶部103内のステップs21で取得した対象道路情報806から取得する。なお制御部100は、対象横断歩道3の各進入口35の代表点36の位置情報が記憶部103内の対象道路情報806に含まれていなければ、補正処理を終了する。あるいは、制御部100は、上述の進入口推定処理と同様にして、対象横断歩道3の各進入口35の代表点36の位置情報を生成して取得する。以後、ステップs22で位置情報が取得される代表点36を「補正前代表点36x」と呼ぶことがある。
次に制御部100は、対象横断歩道3の各進入口35の補正前代表点36xの位置情報と、受信部140で取得される位置情報とに基づいて、上述のステップs3と同様にして、ユーザ9が対象横断歩道3に進入しようとしているか否かを判定する。これにより、ステップs22が終了する。
制御部100は、ステップs22において、ユーザ9が対象横断歩道3に進入しようとしていないと判定すると、補正処理を終了する。一方で、制御部100は、ユーザ9が対象横断歩道3に進入しようとしていると判定すると、ステップs23において、所定時間の間でのユーザ9の移動経路90(図17参照)を特定する。制御部100は、受信部140で繰り返し取得される位置情報に基づいて、ユーザ9の移動経路90を特定する。移動経路90は、電子機器10の移動経路であるとも言える。
次にステップs24において、制御部100は、ステップs23で特定した移動経路90に基づいて、第1進入口35a及び第2進入口35bにおけるユーザ9の通過点37(図17参照)を特定する。以下にステップs24について詳細に説明する。
ステップs24では、制御部100は、上述のステップs13と同様にして、ステップs21で取得した対象道路情報806に基づいて、対象横断歩道3を含む道路70の延在方向76を特定する。
次に制御部100は、図17に示されるように、延在方向76に平行であり、かつ第1進入口35aの補正前代表点36xを通る平行線77と、延在方向76に平行であり、かつ第2進入口35bの補正前代表点36xを通る平行線77とを求める。
次に制御部100は、図17に示されるように、各平行線77において、当該平行線77が通る補正前代表点36xを含む所定範囲を監視対象線77aとする。例えば、補正前代表点36xから平行線77の一方端に向かって数mの範囲と、補正前代表点36xから平行線77の他方端に向かって数mの範囲とが、監視対象線77aとされる。
次に制御部100は、ステップs23で特定した移動経路90に基づいて、対象横断歩道3を横断するユーザ9が監視対象線77aを通過する通過点を特定する。そして、制御部100は、監視対象線77aにおける特定した通過点を、当該監視対象線77aに含まれる補正前代表点36xに対応する進入口35におけるユーザ9の通過点37であるとする。制御部100は、第1進入口35a及び第2進入口35bのそれぞれについて、進入口35におけるユーザ9の通過点37を特定する。
ここで、図18に示されるように、対象横断歩道3を横断しようとするユーザ9は、監視対象線77aを複数回通過した後に対象横断歩道3を横断する可能性がある。このような場合、制御部100は、移動経路90を解析して、ユーザ9が対象横断歩道3を横断する際に監視対象線77aを最後に通過した通過点を特定し、特定した通過点を、進入口35におけるユーザ9の通過点37であるとする。
このようにして、制御部100は、ステップs24において、第1進入口35a及び第2進入口35bのそれぞれにおけるユーザ9の通過点37を特定する。ユーザ9が、横断歩道3の進入口35を、歩道側から車道側へ通過したときの通過点37は、ユーザ9が横断歩道3に進入したときの進入点であると言える。
次にステップs25において、制御部100は、特定した通過点37に基づいて、補正前代表点36xの位置を補正する。補正前代表点36xの位置を補正することによって得られる新たな代表点36が、対象横断歩道3を人が横断する際に対象横断歩道3へ進入する可能性が高い進入点となる。以後、当該新たな代表点36を「補正後代表点36y」(図17参照)と呼ぶことがある。
ここで、補正前代表点36xの位置情報が、補正前代表点36xの位置座標(X1,Y1)を示し、通過点37の位置情報が、通過点37の位置座標を(X2,Y2)を示し、補正後代表点36yの位置情報が、補正後代表点36yの位置座標(X3,Y3)を示すとする。本例では、制御部100は、以下の式(1),(2)を使用して、補正後代表点36yの位置座標(X3,Y3)を求める。
式(1)中のW1は重み係数であって、0<W1<1に設定される。また、式(2)中のW2は重み係数であって、0<W2<1に設定される。W1及びW2は、例えばそれぞれ0.99に設定される。なお、W1及びW2の値はこの限りではない。また、W1及びW2は互いに異なる値であってもよい。
このようにして、制御部100は、ステップs25において、第1進入口35a及び第2進入口35bのそれぞれにおける補正後代表点36yの位置情報(位置座標(X3,Y3))を求める。
制御部100は、ステップs25において補正後代表点36yの位置情報を生成すると、ステップs26において、無線通信部110に、対象横断歩道3の各進入口35の補正後代表点36yの位置情報と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。サーバ装置8は、電子機器10から受け取ったデータに基づいて、記憶部803内の道路情報806を更新する。具体的には、サーバ装置8の制御部800は、電子機器10からのデータに含まれる、対象横断歩道3の代表点30の位置情報に基づいて、記憶部803内の、対象横断歩道3を含む道路70に関する道路情報806を特定する。そして、制御部800は、電子機器10からのデータに含まれる、対象横断歩道3の各進入口35の補正後代表点36yの位置情報を、特定した道路情報806の道路特定情報に含めることによって、当該道路情報806を更新する。このとき、当該道路情報806に含まる、対象横断歩道3の各進入口35の補正前代表点36xの位置情報は削除される。このようにして、道路情報806に含まれる、横断歩道3の進入口35の代表点36の位置情報が更新される。
以上のように、上述の一例では、進入口推定処理において求められる、横断歩道3の進入口35の代表点36の位置が、電子機器10の位置情報に基づいて補正される。そのため、上述の図15に示される横断歩道3Aのように、横断歩道3の延在方向が、当該横断歩道3を含む道路70の延在方向76に対して垂直となっていない場合であっても、代表点36の位置が、実際の進入口35の中心から大きく離れる可能性を低減することができる。図17の例では、補正後代表点36yの位置が、補正前代表点36xの位置よりも、実際の進入口35の中心に近くなっている。よって、人が横断歩道3を横断する際には補正後の代表点36から進入する可能性が高いと言える。つまり、補正後の代表点36は、人が横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入点であると言える。
電子機器10では、人が横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入点が推測されるため、推測された当該進入点を利用した処理を、電子機器10あるいはそれ以外の装置が行うことができる。よって、電子機器10の利便性が向上する。
なお上記の例では、補正後代表点36yの位置が、補正前代表点36xの位置と、通過点37の位置と、重み係数とに基づいて決定されているが、他の方法で決定されてもよい。例えば、制御部100は、ユーザ9が横断歩道3を横断するたびに、進入口35におけるユーザ9の通過点37を特定する。そして、制御部100は、進入口35におけるユーザ9の通過点37を複数回特定すると、それによって得られた複数回分の通過点37の位置の平均を補正後代表点36yの位置とする。
また、上述の補正処理は、電子機器10ではなく路側機5で実行されてもよいし、サーバ装置8で実行されてもよい。路側機5が補正処理を行う場合には、ステップs21において、路側機5の制御部500は、有線通信部520に、路側機5の位置情報をサーバ装置8に送信させる。サーバ装置8の制御部800は、受け取った路側機5の位置情報に基づいて、路側機5の周辺の道路に関する道路情報806を記憶部803内の地図情報805から取得する。そして、制御部800は、通信部810に、取得した道路情報806を路側機5に送信させる。これにより、路側機5は、サーバ装置8から、自身の周辺の道路に関する道路情報806を取得することができる。制御部500で行われるステップs22~s25は、制御部100で行われる上述のステップs22~s25と同様である。ただし、制御部500は、ステップs22,s23を実行するために、無線通信部510を通じて、電子機器10から、当該電子機器10の位置情報を取得する必要がある。ステップs25の後、制御部500は、ステップs26において、有線通信部520に、対象横断歩道3の各進入口35の補正後の代表点36の位置情報と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。サーバ装置8の制御部800は、上記と同様にして、受け取ったデータに基づいて道路情報806を更新する。
図19はサーバ装置8が行う補正処理の一例を示すフローチャートである。図19に示されるように、ステップs21aにおいて、サーバ装置8の制御部800は、記憶部803から、横断歩道3(対象横断歩道3)を含む道路70に関する道路情報806(対象道路情報806)を取得する。
次にステップs22aにおいて、制御部800は、ステップs21aで取得した対象道路情報806に基づいて、ユーザ9が対象横断歩道3に進入しようとしているか否かを判定する。ステップs22aでは、制御部800は、通信部810を通じて、電子機器10から、当該電子機器10の位置情報を取得する。そして、制御部800は、取得した電子機器10の位置情報と、ステップs21aで取得した対象道路情報806に含まれる、対象横断歩道3の各進入口35の補正前代表点36xの位置情報とに基づいて、ユーザ9が対象横断歩道3に進入しようとしているか否かを上記と同様にして判定する。
ステップs22aにおいて、ユーザ9が対象横断歩道3に進入しようとしていないと判定されると、補正処理が終了する。一方で、ステップs22aにおいて、ユーザ9が対象横断歩道3に進入しようとしていると判定されると、制御部800は、ステップs23a~s25aを実行する。制御部800で行われるステップs23a~s25aは、制御部100で行われる上述のステップs23~s25と同様である。ただし、制御部800は、ステップs23aを実行するために、通信部810を通じて、電子機器10から、当該電子機器10の位置情報を取得する必要がある。ステップs25aの後、制御部800は、ステップs26aにおいて、対象横断歩道3の各進入口35の補正後代表点36yの位置情報を、ステップs21aで取得した対象道路情報806の道路特定情報に含めることによって、対象道路情報806を更新する。このとき、対象道路情報806に含まる、対象横断歩道3の各進入口35の補正前代表点36xの位置情報は削除される。
またサーバ装置8は、複数の電子機器10から通知される、同じ横断歩道3についての進入口35の補正後代表点36yの位置情報に基づいて、当該横断歩道3を含む道路70に関する道路情報806を更新してもよい。例えば、サーバ装置8の制御部800は、複数の電子機器10から通知される、同じ横断歩道3(対象横断歩道3)についての進入口35の補正後代表点36yの位置情報に基づいて、当該補正後代表点36yの位置の平均を示す平均位置情報を生成する。そして、制御部800は、記憶部803内における、対象横断歩道3を含む道路70に関する道路情報806(対象道路情報806)に含まれる、対象横断歩道3の代表点36の位置情報を、求めた平均位置情報に置き換える。これにより、対象道路情報806に含まれる、対象横断歩道3の代表点36の位置情報が更新され、その結果、対象道路情報806が更新される。なお、この更新処理は、対象道路情報806に含まれる、対象横断歩道3の各進入口35の代表点36の位置情報について行われる。
また、路側機5の制御部500が、複数の電子機器10から通知される、同じ横断歩道3についての進入口35の補正後代表点36yの位置情報に基づいて、当該補正後代表点36yの位置の平均を示す平均位置情報を生成してもよい。この場合、制御部500は、有線通信部520に、生成した平均位置情報をサーバ装置8に送信させる。サーバ装置8の制御部800は、記憶部803内における、当該横断歩道3を含む道路70に関する道路情報806に含まれる、当該横断歩道3の代表点36の位置情報を、受け取った平均位置情報に置き換える。
また、路側機5あるいはサーバ装置8が補正処理を行う場合は、路側機5あるいはサーバ装置8は、複数の電子機器10から通知される電子機器10の位置情報と、道路情報806とに基づいて、横断歩道3の各進入口35の代表点36の位置を補正してもよい。図20はこの場合の路側機5での補正処理の一例を示すフローチャートである。また図21は、この場合のサーバ装置8での補正処理の一例を示すフローチャートである。図20を用いた以下の説明では、各電子機器10は、自身の位置情報を繰り返し路側機5に送信しているものとする。また、図21を用いた以下の説明では、各電子機器10は、自身の位置情報を繰り返しサーバ装置8に送信しているものとする。また、電子機器10の位置情報を「機器位置情報」と呼ぶことがある。
図20に示されるように、ステップs21bにおいて、路側機5の制御部500は、自身の周辺の道路に関する道路情報806を、有線通信部520を介して、サーバ装置8から取得する。ステップs21bでは、制御部500は、有線通信部520に、路側機5の位置情報をサーバ装置8に送信させる。サーバ装置8の制御部800は、受け取った路側機5の位置情報に基づいて、路側機5の周辺の道路に関する道路情報806を記憶部803内の地図情報805から取得する。そして、制御部800は、通信部810に、取得した道路情報806を路側機5に送信させる。これにより、路側機5は、サーバ装置8から、自身の周辺の道路に関する道路情報806(対象道路情報806)を取得することができる。
次にステップs22bにおいて、制御部500は、各電子機器10が通知する機器位置情報と、ステップs21bで取得した対象道路情報806とに基づいて、対象道路情報806にその横断歩道位置情報(代表点30の位置情報)が含まれる同じ横断歩道3に対して、複数の電子機器10のユーザ9が進入していようとしているか否かを判定する。電子機器10のユーザ9が横断歩道3に進入していようとしているか否かは上述のように判定することができることから、制御部500は、対象道路情報806にその横断歩道位置情報(代表点30の位置情報)が含まれる同じ横断歩道3に対して、複数の電子機器10のユーザ9が進入していようとしているか否かを判定することが可能である。
ステップs22bにおいて、Noと判定されると、補正処理が終了する。一方で、ステップs22bにおいて、複数の電子機器10のユーザ9が同じ横断歩道3(対象横断歩道3)に進入しようとしていると判定されると、ステップs23bにおいて、制御部500は、対象横断歩道3に進入しようとする複数の電子機器10のユーザ9の移動経路90を、当該複数の電子機器10からの機器位置情報に基づいて特定する。
次にステップs24bにおいて、制御部500は、ステップs23bで特定した、複数の電子機器10のユーザ9の移動経路90と、ステップs21bで取得した対象道路情報806とに基づいて、対象横断歩道3の進入口35における、当該複数の電子機器10のユーザのそれぞれの通過点37を特定する。通過点37の特定方法は上記と同様である。図22は、ステップs21bで特定される通過点37の一例を示す図である。
次にステップs25bにおいて、制御部500は、ステップs24bで特定された、複数の電子機器10のユーザの通過点37に基づいて、対象横断歩道3の進入口35の代表点36(補正前代表点36x)の位置を補正する。制御部500は、例えば、ステップs24bで特定された、複数の電子機器10のユーザの通過点37の位置の平均を示す平均位置情報を生成する。そして、制御部500は、対象横断歩道3の進入口35の補正後代表点36yの位置情報として、生成した平均位置情報を採用する。制御部500は、第1進入口35a及び第2進入口35bのそれぞれの補正後代表点36yの位置情報を同様にして求める。
次にステップs26bにおいて、制御部500は、有線通信部520に、対象横断歩道3の各進入口35の補正後代表点36yの位置情報と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。サーバ装置8の制御部800は、上記と同様にして、受け取ったデータに基づいて道路情報806を更新する。
サーバ装置8は、路側機5と同様にして、複数の電子機器10から通知される機器位置情報と、道路情報806とに基づいて、横断歩道3の進入口35の代表点36の位置を補正することができる。図21に示されるように、ステップs21cにおいて、サーバ装置8の制御部800は、記憶部803から、横断歩道3(対象横断歩道3)を含む道路70に関する道路情報806(対象道路情報806)を取得する。
次にステップs22cにおいて、制御部800は、各電子機器10が通知する機器位置情報と、ステップs21cで取得した対象道路情報806とに基づいて、対象横断歩道3に対して、複数の電子機器10のユーザ9が進入していようとしているか否かを判定する。
ステップs22cにおいて、Noと判定されると、補正処理が終了する。一方で、ステップs22cにおいて、複数の電子機器10のユーザ9が対象横断歩道3に進入しようとしていると判定されると、ステップs23cにおいて、制御部800は、対象横断歩道3に進入しようとする複数の電子機器10のユーザ9の移動経路90を、当該複数の電子機器10からの機器位置情報に基づいて特定する。
次に制御部800はステップs24c,s25cを実行する。制御部800が行うステップs24c,s25cは、路側機5の制御部500が行う上述のステップs24b,s25bと同様である。
ステップs25cの後、制御部800は、ステップs26cにおいて、対象横断歩道3の各進入口35の補正後代表点36yの位置情報を、ステップs21cで取得した対象道路情報806の道路特定情報に含めることによって、対象道路情報806を更新する。このとき、対象道路情報806が含む、対象横断歩道3の各進入口35の補正前代表点36xの位置情報は削除される。
また、路側機5あるいはサーバ装置8は、複数の電子機器10が特定した、同じ横断歩道3(対象横断歩道3)の進入口35での人の通過点37(進入点)の位置情報に基づいて、当該進入口35の代表点36の位置を補正してもよい。つまり、路側機5あるいはサーバ装置8は、複数の電子機器10が特定した、同じ横断歩道3の進入口35での人の通過点37の位置情報に基づいて、人が当該横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入点を推定してもよい。この場合、路側機5あるいはサーバ装置8は、複数の電子機器10から通知される、同じ横断歩道3の進入口35の通過点37の位置情報に基づいて、上述のステップs25b,s25cと同様にして、当該横断歩道3の進入口35の補正前代表点36xの位置を補正して、補正後代表点36yの位置情報を生成する。
次に情報処理システム1のさらに別の一例について説明する。
図23に示されるように、横断歩道3の幅が大きい場合には、ユーザ9は、横断歩道3の進入口35の代表点36から大きく離れた位置から当該横断歩道3に進入する可能性がある。その結果、ユーザ9が横断歩道3を横断しようとしているにもかかわらず、代表点36から半径所定距離の範囲360外に電子機器10が位置することがある。この場合、ユーザ9が横断歩道3を横断しようとしているにもかかわらず、通知決定処理のステップs3では、ユーザ9が、横断歩道3に進入しようとしていると判定されない可能性がある。
そこで、本実施形態の他の一例に係る進入口推定処理においては、横断歩道3の進入口35が線で推定される。つまり、電子機器10は、進入口推定処理において、人が横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線を推定する。これにより、ユーザ9が横断歩道3を横断しようとしているにもかかわらず、ユーザ9が横断歩道3に進入しようとしていると判定されない可能性を低減することができる。以下に本実施形態の他の一例に係る進入口推定処理について詳細に説明する。なお、ここで説明する本実施形態の他の一例では、上述の補正処理が行われない。
図24は本実施形態の他の一例に係る進入口推定処理を説明するための図である。本実施形態の他の一例では、電子機器10の制御部100は、進入口推定処理の実行と並行して、受信部140で取得される位置情報に基づいてユーザ9の移動経路90を特定する。
進入口推定処理において、制御部100は、上記と同様にしてステップs11~s13を実行する。ステップs13の後、ステップs14において、制御部100は、ステップs11で取得した対象道路情報806と、進入口推定処理の実行と並行して特定するユーザ9の移動経路90とに基づいて、第1進入口35a及び第2進入口35bを線で推定する。以下に本実施形態の他の一例に係るステップs14を詳細に説明する。
ステップs14において、制御部100は、上記と同様にして、第1進入口35aの代表点36と、第2進入口35bの代表点36とを求める。そして、制御部100は、上述のステップs24と同様にして、第1進入口35a及び第2進入口35bのそれぞれについて、進入口35におけるユーザ9の通過点37を特定する。
具体的には、制御部100は、図24に示されるように、対象道路70の延在方向76に平行であり、かつ第1進入口35aの代表点36を通る平行線77と、延在方向76に平行であり、かつ第2進入口35bの代表点36を通る平行線77とを求める。
次に制御部100は、図24に示されるように、各平行線77において、当該平行線77が通る代表点36を含む所定範囲を監視対象線77aとする。
次に制御部100は、特定した移動経路90に基づいて、対象横断歩道3を横断するユーザ9が監視対象線77aを通過する通過点を特定する。そして、制御部100は、監視対象線77aにおける特定した通過点を、当該監視対象線77aに含まれる代表点36に対応する進入口35におけるユーザ9の通過点37であるとする。制御部100は、第1進入口35a及び第2進入口35bのそれぞれについて、進入口35におけるユーザ9の通過点37を特定する。
なお、上記と同様に、対象横断歩道3を横断しようとするユーザ9は、監視対象線77aを複数回通過した後に対象横断歩道3を横断する可能性がある。このような場合、制御部100は、移動経路90を解析して、ユーザ9が横断歩道3を横断する際に監視対象線77aを最後に通過した通過点を特定し、特定した通過点が、進入口35におけるユーザ9の通過点37であるとする。
本実施形態の他の一例では、制御部100は、ユーザ9が対象横断歩道3を複数回横断したことを示す移動経路90に基づいて、第1進入口35a及び第2進入口35bのそれぞれについて、ユーザ9の複数回の横断にそれぞれ対応する複数の通過点37を特定する。つまり、制御部100は、第1進入口35a及び第2進入口35bのそれぞれについて、ユーザ9の対象横断歩道3の1回の横断に対応して1つの通過点37を特定する処理を、ユーザ9の複数回の横断のそれぞれに応じて実行する。これにより、ユーザ9が対象横断歩道3を複数回横断すると、第1進入口35a及び第2進入口35bのそれぞれについて、複数の通過点37が特定される。図24には、制御部100で特定される通過点37の一例が示されている。
次に制御部100は、第1進入口35aについて特定した複数の通過点37のうち、両端の2つの通過点37を特定する。そして、制御部100は、特定した2つの通過点37を結ぶ線を、人が対象横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線39とする。これにより、第1進入口35が線で推定される。この進入線39は、第1進入口35aを示す線であると言える。
同様に、制御部100は、第2進入口35bについて特定した複数の通過点37のうち、両端の2つの通過点37を特定する。そして、制御部100は、特定した2つの通過点37を結ぶ線を、人が対象横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線39とする。これにより、第2進入口35が線で特定される。この進入線39は、第2進入口35bを示す線であると言える。図24の例では、各進入口35について、実際の幅に近い幅を有する進入線39が特定される。
ステップs14において、制御部100は、第1進入口35a及び第2進入口35bを線で推定すると、ステップs15において、無線通信部110に、対象横断歩道3の各進入口35の位置情報と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。本実施形態の他の一例では、第1進入口35aの位置情報として、第1進入口35を示す進入線39の両端の位置を示す位置情報が採用される。この位置情報は、進入線39を特定するための特定情報であると言える。同様に、第2進入口35bの位置情報として、第2進入口35bを示す進入線39の両端の位置を示す位置情報が採用される。
電子機器10からデータを受け取ったサーバ装置8の制御部800は、当該データに含まれる、横断歩道3の代表点30の位置情報に基づいて、記憶部803内の、当該横断歩道3を含む道路70に関する道路情報806を特定する。そして、制御部800は、電子機器10からのデータに含まれる、横断歩道3の各進入口35の位置情報(進入線39の両端の位置情報)を、特定した道路情報806の道路特定情報に含めることによって、当該道路情報806を更新する。
本実施形態の他の一例に係る通知決定処理では、制御部100は、ステップs2でユーザ9が車道7に出ようとしていると判定すると、ステップs3において、その車道7に横断歩道3が含まれているか否かを、記憶部103内の道路情報806に基づいて判定する。制御部100は、車道7に横断歩道3が含まれていないと判定すると、その車道7に進入しようとしているユーザ9は横断歩道3には進入しようとしていないと判定する。
一方で、制御部100は、車道7に横断歩道3が含まれていると判定すると、その横断歩道3(対象横断歩道3)の各進入口35の位置情報を、記憶部103内の、サーバ装置8から受け取った道路情報806から取得する。そして、制御部100は、各進入口35の位置情報と、受信部140で取得される位置情報とに基づいて、対象横断歩道3にユーザ9が進入しようとしているか否かを判定する。制御部100は、例えば、図25に示されるように、第1進入口35aの位置情報(第1進入口35aを示す進入線39の両端の位置情報)に基づいて、第1進入口35aを示す進入線39を1辺とする長方形の第1所定領域390aを、対象横断歩道3の外側に設定する。また、制御部100は、第2進入口35bの位置情報(第2進入口35bを示す進入線39の両端の位置情報)に基づいて、第2進入口35bを示す進入線39を1辺とする長方形の第2所定領域390bを、対象横断歩道3の外側に設定する。そして、制御部100は、第1所定領域390a及び第2所定領域390bのいずれか一方の範囲内に電子機器10が存在する場合には、車道7に進入しようとしているユーザ9は、対象横断歩道3に進入しようとしていると判定する。一方で、制御部100は、第1所定領域390a内に電子機器10が存在せず、かつ第2所定領域390b内に電子機器10が存在しない場合には、車道7に進入しようとしているユーザ9は、対象横断歩道3には進入しようとしていないと判定する。
なお、本実施形態の他の一例に係るステップs3においては、上記とは異なる方法で進入線39が利用されることによって横断歩道進入判定が行われてもよい。
以上のように、本実施形態の他の一例では、人が横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線39が推定される。通知決定処理のステップs3において、推定された進入線39が利用されることによって、横断歩道3の幅が大きい場合であっても、横断歩道3を横断しようとするユーザ9が、当該横断歩道3に進入しようとしていないと誤って判定される可能性を低減することができる。
また、電子機器10では、人が横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線39が推定されるため、推測された当該進入線39を利用した処理を、電子機器10あるいはそれ以外の装置が行うことができる。よって、電子機器10の利便性が向上する。
なお、本実施形態の他の一例の進入口推定処理は、電子機器10ではなく路側機5で実行されてもよいし、サーバ装置8で実行されてもよい。路側機5が進入口推定処理を行う場合には、路側機5の制御部500は、無線通信部510を通じて、電子機器10から当該電子機器10の位置情報を取得する。そして、制御部500は、電子機器10の位置情報に基づいてユーザ9の移動経路90を特定する。また制御部500は、ステップs11において、有線通信部520を通じて、サーバ装置8から横断歩道3を含む道路70に関する道路情報806を取得する。制御部500で行われるステップs12~s14は、制御部100で行われる本実施形態の他の一例のステップs12~s14と同様である。ステップs14の後、制御部500は、ステップs15において、有線通信部520に、対象横断歩道3の各進入口35の位置情報(進入線39の特定情報)と、対象横断歩道3の代表点30の位置情報とを含むデータをサーバ装置8に送信させる。サーバ装置8は、路側機5からのデータに基づいて、上記と同様にして道路情報806を更新する。
サーバ装置8が進入口推定処理を行う場合には、サーバ装置8の制御部800は、通信部810を通じて、電子機器10から当該電子機器10の位置情報を取得する。そして、制御部800は、電子機器10の位置情報に基づいてユーザ9の移動経路90を特定する。また制御部800は、上述の図14に示される進入口推定処理と同様の処理を行う。具体的には、ステップs11aにおいて、制御部800は、記憶部803から、横断歩道3を含む道路70に関する道路情報806を読み出す。次に、制御部800はステップs12a~s14aを実行する。制御部800で行われるステップs12a~s14aは、制御部100で行われる本実施形態の他の一例に係るステップs12~s14とそれぞれ同様である。ステップs14aの後、制御部800は、ステップs15aにおいて、対象横断歩道3の各進入口35の位置情報(進入線39の特定情報)を、対象道路情報806の道路特定情報に含めることによって、対象道路情報806を更新する。
またサーバ装置8は、複数の電子機器10から通知される、同じ横断歩道3についての進入線39の特定情報(進入線39の両端の位置情報)に基づいて、当該横断歩道3を含む道路70に関する道路情報806を更新してもよい。例えば、サーバ装置8の制御部800は、複数の電子機器10からそれぞれ通知される、同じ横断歩道3についての複数の進入線39の特定情報に基づいて、当該複数の進入線39の論理和領域を求めて、当該論理和領域の両端の位置情報を生成する。ここで、複数の進入線39の論理和領域とは、当該複数の進入線39の一方端のうち、最も外側にある一方端と、当該複数の進入線39の他方端のうち、最も外側にある他方端とを結ぶ線を意味する。制御部800は、対象横断歩道3の各進入口35について、論理和領域の両端の位置情報を生成する。そして、制御部800は、生成した論理和領域の両端の位置情報を、対象横断歩道3の各進入口35の位置情報として、対象道路情報806に含めて、対象道路情報806を更新する。
また、路側機5の制御部500が、複数の電子機器10からそれぞれ通知される、同じ横断歩道3についての複数の進入線39の位置情報に基づいて、当該複数の進入線39の論理和領域の位置情報を生成してもよい。この場合、制御部500は、有線通信部520に、対象横断歩道3の各進入口35に対応する論理和領域の位置情報をサーバ装置8に送信させる。サーバ装置8の制御部800は、記憶部803内における、対象横断歩道3を含む道路70に関する道路情報806に、受け取った論理和領域の情報を各進入口35の位置情報として含める。
また、路側機5あるいはサーバ装置8が進入口推定処理を行う場合は、路側機5あるいはサーバ装置8は、複数の電子機器10から通知される機器位置情報と、道路情報806とに基づいて、進入線39を推定してもよい。
路側機5が、複数の電子機器10から通知される機器位置情報と、道路情報806とに基づいて、進入線39を推定する場合には、制御部500は、無線通信部510を通じて、複数の電子機器10のそれぞれから機器位置情報を取得する。そして、制御部500は、取得した機器位置情報に基づいて、複数の電子機器10のそれぞれのユーザ9の移動経路90を特定する。また制御部500は、進入口推定処理を行う場合には、上記と同様にしてステップs11~s13を実行する。そしてステップs14において、制御部500は、複数の電子機器10のユーザ9の移動経路90に基づいて、対象横断歩道3の各進入口35に対応する進入線39を推定する。ステップs14では、制御部500は、複数の電子機器10のそれぞれのユーザ9の移動経路90に基づいて、第1進入口35a及び第2進入口35bのそれぞれについて、当該複数の電子機器10のそれぞれのユーザ9が対象横断歩道3を横断する際の進入口35の通過点37を特定する。通過点37の特定方法は上記と同様である。これにより、上述の図24と同様に、第1進入口35a及び第2進入口35bのそれぞれについて、複数の通過点37が特定される。
制御部500は、第1進入口35a及び第2進入口35bのそれぞれについて、複数の通過点37を特定すると、上記と同様にして、第1進入口35a及び第2進入口35bのそれぞれについての進入線39を推定する。その後、制御部500は、上記と同様にしてステップs15を実行する。
サーバ装置8が、複数の電子機器10から通知される機器位置情報と、道路情報806とに基づいて、進入線39を推定する場合には、制御部800は、通信部810を通じて、複数の電子機器10のそれぞれから機器位置情報を取得する。そして、制御部800は、取得した機器位置情報に基づいて、複数の電子機器10のそれぞれのユーザ9の移動経路90を特定する。また制御部500は、進入口推定処理を行う場合には、上記と同様にしてステップs11a~s13aを実行する。そしてステップs14aにおいて、制御部800は、複数の電子機器10のユーザ9の移動経路90に基づいて進入線39を推定する。ステップs14では、制御部800は、複数の電子機器10のそれぞれのユーザ9の移動経路90に基づいて、第1進入口35a及び第2進入口35bのそれぞれについて、当該複数の電子機器10のそれぞれのユーザ9が対象横断歩道3を横断する際の進入口35の通過点37を特定する。これにより、第1進入口35a及び第2進入口35bのそれぞれについて、複数の通過点37が特定される。
制御部800は、各進入口35について複数の通過点37を特定すると、上記と同様にして、各進入口35についての進入線39を推定する。その後、制御部800は、上記と同様にしてステップs15aを実行する。
また、路側機5あるいはサーバ装置8は、複数の電子機器10が特定した、同じ横断歩道3(対象横断歩道3)の進入口35での人の通過点37(進入点)の位置情報に基づいて、当該進入口35を示す進入線39を推定してもよい。つまり、路側機5あるいはサーバ装置8は、複数の電子機器10が特定した、同じ横断歩道3の進入口35での人の通過点37の位置情報に基づいて、人が当該横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線39を推定してもよい。この場合、路側機5あるいはサーバ装置8は、複数の電子機器10から通知される、同じ横断歩道3の進入口35の通過点37の位置情報に基づいて、上述と同様にして、当該進入口35を示す進入線39を求める。
上記の例では、車道7の横断歩道3にユーザ9が進入しようとしているか否かが判定されているが、車道7の他の領域にユーザ9が進入しようとしているか否かが判定されてもよい。例えば、車道7に設けられた自転車横断帯に自転車に乗ったユーザ9が進入しようとしているか否かが判定されてもよい。上述の情報処理システム1の動作説明において、横断歩道を自転車横断帯に置き換えれば、自転車横断帯にユーザ9が進入しようとしているか否かを判定する情報処理システム1が実現される。
また上記の例では、人が車道7の横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入点が推定されているが、人が車道7を横断する際に当該車道7へ進入する可能性が高い進入点を推定する例としては他の例であってもよい。例えば、車道7に設けられた自転車横断帯を自転車の乗った人が横断する際に当該自転車横断帯へ進入する可能性が高い進入点が推定されてもよい。
また上記の例では、人が車道7の横断歩道3を横断する際に当該横断歩道3へ進入する可能性が高い進入線が推定されているが、人が車道7を横断する際に当該車道7へ進入する可能性が高い進入線を推定する例としては他の例であってもよい。例えば、車道7に設けられた自転車横断帯を自転車の乗った人が横断する際に当該自転車横断帯へ進入する可能性が高い進入線が推定されてもよい。
また上記の例では、電子機器10は、スマートフォン等の携帯電話機であったが、他の種類の電子機器であってよい。電子機器10は、例えば、タブレット端末、パーソナルコンピュータ、ウェアラブル機器などであってよい。電子機器10として採用されるウェアラブル機器は、リストバンド型あるいは腕時計型などの腕に装着するタイプであってもよいし、ヘッドバンド型あるいはメガネ型などの頭に装着するタイプであってもよいし、服型などの体に装着するタイプであってもよい。
以上のように、情報処理システム1は詳細に説明されたが、上記した説明は、全ての局面において例示であって、この開示がそれに限定されるものではない。また、上述した各種の例は、相互に矛盾しない限り組み合わせて適用可能である。そして、例示されていない無数の実施形態が、この開示の範囲から外れることなく想定され得るものと解される。
1 情報処理システム
5 路側機
8 サーバ装置
10 電子機器
100,500,800 制御部
5 路側機
8 サーバ装置
10 電子機器
100,500,800 制御部
Claims (49)
- 携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する第1決定部を備える、情報処理装置。
- 請求項1に記載の情報処理装置であって、
前記第1決定部は、前記道路情報に基づいて、人が前記車道を横断する際の進入口を推定し、当該進入口を前記所定箇所とする、情報処理装置。 - 請求項2に記載の情報処理装置であって、
前記所定箇所の位置情報は、前記第1決定部で推定された前記進入口の代表点の位置情報である、情報処理装置。 - 請求項2に記載の情報処理装置であって、
前記所定箇所の位置情報は、前記第1決定部で推定された前記進入口の両端の位置情報を少なくとも含む、情報処理装置。 - 請求項2乃至請求項4のいずれか一つに記載の情報処理装置であって、
前記第1決定部は、前記道路情報と、前記携帯型電子機器の位置情報とに基づいて、前記進入口を推定する、情報処理装置。 - 請求項2乃至請求項5のいずれか一つに記載の情報処理装置であって、
前記第1決定部は、前記道路情報に基づいて、人が前記車道の横断歩道を横断する際の前記進入口を推定する、情報処理装置。 - 請求項1乃至請求項6のいずれか一つに記載の情報処理装置であって、
前記所定箇所の位置情報を、前記情報処理装置と通信可能な装置に送信する通信部をさらに備える、情報処理装置。 - 請求項1乃至請求項7のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記携帯型電子機器であって、
前記携帯型電子機器の位置情報と、前記所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する第2決定部をさらに備える、情報処理装置。 - 請求項1乃至請求項7のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記携帯型電子機器と通信を行うことが可能な路側機である、情報処理装置。 - 請求項1乃至請求項7のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記道路情報を管理する、前記携帯型電子機器とは別の管理装置であって、
前記管理装置は、前記第1決定部が決定した前記所定箇所の位置情報を前記携帯型電子機器に送信する、情報処理装置。 - 請求項10に記載の情報処理装置であって、
前記第1決定部が決定した前記所定箇所の位置情報に基づいて前記道路情報を更新する更新部をさらに備える、情報処理装置。 - 道路情報を管理する管理装置であって、
前記道路情報を記憶する記憶部と、
請求項1乃至請求項9のいずれか一つに記載の情報処理装置が前記道路情報に基づいて決定した前記所定箇所の位置情報に基づいて前記道路情報を更新する更新部と
を備える、管理装置。 - 情報処理装置の動作を制御するための制御プログラムであって、
前記情報処理装置に、
携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する工程を実行させるための制御プログラム。 - 情報処理装置の動作方法であって、
携帯型電子機器が、当該携帯型電子機器の位置情報と、車道上の所定箇所の位置情報とに基づいて、当該携帯型電子機器の外部に当該携帯型電子機器が通知を行うか否かを決定する場合における当該所定箇所を、道路情報に基づいて決定する工程を備える、情報処理装置の動作方法。 - 横断歩道の代表点の位置情報と、
前記代表点の位置情報に基づいて推定された前記横断歩道の進入口の位置情報と
を含み、
道路情報を管理する管理装置の制御部に、前記代表点の位置情報と前記進入口の位置情報とに基づいて当該道路情報を更新させるためのデータ構造。 - 携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入点を推測する推測部を備える、情報処理装置。
- 請求項16に記載の情報処理装置であって、
前記推定部は、人が前記車道の横断歩道を横断する際に当該横断歩道へ進入する可能性が高い前記進入点を推測する、情報処理装置。 - 請求項16及び請求項17のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記携帯型電子機器と通信を行うことが可能な路側機である、情報処理装置。 - 請求項16及び請求項17のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記道路情報を管理する、前記携帯型電子機器とは別の管理装置である、情報処理装置。 - 請求項19に記載の情報処理装置であって、
前記推定部が推定した前記進入点に基づいて前記道路情報を更新する更新部をさらに備える、情報処理装置。 - 請求項16及び請求項20のいずれか一つに記載の情報処理装置であって、
前記推定部は、複数の携帯型電子機器の位置情報と前記道路情報とに基づいて、前記進入点を推測する、情報処理装置。 - 請求項16及び請求項17のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記携帯型電子機器である、情報処理装置。 - 道路情報を管理する管理装置であって、
前記道路情報を記憶する記憶部と、
請求項1乃至請求項3と請求項7のいずれか一つに記載の情報処理装置が前記道路情報に基づいて推定した前記進入点に基づいて前記道路情報を更新する更新部と
を備える、管理装置。 - 複数の携帯型電子機器と通信可能な情報処理装置であって、
人が車道を横断する際に当該車道へ進入する可能性が高い第1進入点を推測する推測部を備え、
前記複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが前記車道を横断したときの第2進入点を特定し、特定した当該第2進入点の位置情報を前記情報処理装置に送信し、
前記推定部は、前記複数の携帯型電子機器のそれぞれから送信される前記第2進入点の位置情報に基づいて前記第1進入点を推定する、情報処理装置。 - 請求項9に記載の情報処理装置と通信可能な前記複数の携帯型電子機器に含まれる携帯型電子機器。
- 情報処理装置の動作を制御するための制御プログラムであって、
前記情報処理装置に、
携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入点を推測する工程を実行させるための制御プログラム。 - 複数の携帯型電子機器と通信可能な情報処理装置の動作を制御するための制御プログラムであって、
前記複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの第1進入点を特定し、特定した当該第1進入点の位置情報を前記情報処理装置に送信し、
前記情報処理装置に、
前記複数の携帯型電子機器のそれぞれから送信される前記第1進入点の位置情報に基づいて、人が前記車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する工程を実行させるための制御プログラム。 - 複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの第1進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する情報処理装置と通信可能な携帯型電子機器を制御するための制御プログラムであって、
前記携帯型電子機器に、
当該携帯型電子機器の位置情報と道路情報とに基づいて前記第1進入点を特定する第1工程と、
前記第1工程で特定された前記第1進入点の位置情報を前記情報処理装置に送信する第2工程と
を実行させるための制御プログラム。 - 情報処理装置の動作方法であって、
携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断する際に当該車道へ進入する可能性が高い進入点を推測する工程を備える、情報処理装置の動作方法。 - 複数の携帯型電子機器と通信可能な情報処理装置の動作方法であって、
前記複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの第1進入点を特定し、特定した当該第1進入点の位置情報を前情報処理装置に送信し、
前記複数の携帯型電子機器のそれぞれから送信される前記第1進入点の位置情報に基づいて、人が前記車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する工程を備える、情報処理装置の動作方法。 - 複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの第1進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い第2進入点を推定する情報処理装置と通信可能な携帯型電子機器の動作方法であって、
前記携帯型電子機器の位置情報と道路情報とに基づいて前記第1進入点を特定する第1工程と、
前記第1工程で特定された前記第1進入点の位置情報を前記情報処理装置に送信する第2工程と
を備える、携帯型電子機器の動作方法。 - 車道の代表点の位置情報と、
携帯型電子機器の位置情報と前記代表点の位置情報とに基づいて推定された、人が前記車道を横断する際に当該車道へ進入する可能性が高い進入点の位置情報と
を含み、
道路情報を管理する管理装置の制御部に、前記代表点の位置情報と前記進入点の位置情報とに基づいて当該道路情報を更新させるためのデータ構造。 - 携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する推測部を備える、情報処理装置。
- 請求項33に記載の情報処理装置であって、
前記推定部は、前記携帯型電子機器の位置情報と前記道路情報とに基づいて、人が前記車道の横断歩道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該横断歩道を横断する際に当該横断歩道へ進入する可能性が高い前記進入線を推測する、情報処理装置。 - 請求項33及び請求項34のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記携帯型電子機器と通信を行うことが可能な路側機である、情報処理装置。 - 請求項33及び請求項34のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記道路情報を管理する、前記携帯型電子機器とは別の管理装置である、情報処理装置。 - 請求項36に記載の情報処理装置であって、
前記推定部が推定した前記進入線に基づいて前記道路情報を更新する更新部をさらに備える、情報処理装置。 - 請求項33乃至請求項37のいずれか一つに記載の情報処理装置であって、
前記推定部は、複数の携帯型電子機器の位置情報と前記道路情報とに基づいて、人が前記車道を横断したときの前記複数の進入点を特定する、情報処理装置。 - 請求項33及び請求項34のいずれか一つに記載の情報処理装置であって、
前記情報処理装置は、前記携帯型電子機器である、情報処理装置。 - 道路情報を管理する管理装置であって、
前記道路情報を記憶する記憶部と、
請求項1乃至請求項3と請求項7のいずれか一つに記載の情報処理装置が前記道路情報に基づいて推定した前記進入線に基づいて前記道路情報を更新する更新部と
を備える、管理装置。 - 複数の携帯型電子機器と通信可能な情報処理装置であって、
人が車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する推測部を備え、
前記複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが前記車道を横断したときの進入点を特定し、特定した当該進入点の位置情報を前記情報処理装置に送信し、
前記推定部は、前記複数の携帯型電子機器のそれぞれから送信される前記進入点の位置情報に基づいて前記進入線を推定する、情報処理装置。 - 請求項41に記載の情報処理装置と通信可能な前記複数の携帯型電子機器に含まれる携帯型電子機器。
- 情報処理装置の動作を制御するための制御プログラムであって、
前記情報処理装置に、
携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を実行させるための制御プログラム。 - 複数の携帯型電子機器と通信可能な情報処理装置の動作を制御するための制御プログラムであって、
前記複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの進入点を特定し、特定した当該進入点の位置情報を前記情報処理装置に送信し、
前記情報処理装置に、
前記複数の携帯型電子機器のそれぞれから送信される前記進入点の位置情報に基づいて、人が前記車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を実行させるための制御プログラム。 - 複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推定する情報処理装置と通信可能な携帯型電子機器を制御するための制御プログラムであって、
前記携帯型電子機器に、
当該携帯型電子機器の位置情報と道路情報とに基づいて前記進入点を特定する第1工程と、
前記第1工程で特定された前記進入点の位置情報を前記情報処理装置に送信する第2工程と
を実行させるための制御プログラム。 - 情報処理装置の動作方法であって、
携帯型電子機器の位置情報と道路情報とに基づいて、人が車道を横断したときの複数の進入点を特定し、特定した当該複数の進入点に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を備える、情報処理装置の動作方法。 - 複数の携帯型電子機器と通信可能な情報処理装置の動作方法であって、
前記複数の携帯型電子機器のそれぞれは、自身の位置情報と道路情報とに基づいて、自身のユーザが車道を横断したときの進入点を特定し、特定した当該進入点の位置情報を前記情報処理装置に送信し、
前記複数の携帯型電子機器のそれぞれから送信される前記進入点の位置情報に基づいて、人が前記車道を横断する際に当該車道へ進入する可能性が高い進入線を推測する工程を備える、情報処理装置の動作方法。 - 複数の携帯型電子機器のそれぞれが送信する、自身のユーザが車道を横断したときの進入点の位置情報に基づいて、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を推定する情報処理装置と通信可能な携帯型電子機器の動作方法であって、
前記携帯型電子機器の位置情報と道路情報とに基づいて前記進入点を特定する第1工程と、
前記第1工程で特定された前記進入点の位置情報を前記情報処理装置に送信する第2工程と
を備える、携帯型電子機器の動作方法。 - 車道の代表点の位置情報と、
携帯型電子機器の位置情報と前記代表点の位置情報とに基づいて特定された、人が車道を横断したときの複数の進入点に基づいて推定された、人が当該車道を横断する際に当該車道へ進入する可能性が高い進入線を特定するための特定情報と
を含み、
道路情報を管理する管理装置の制御部に、前記代表点の位置情報と前記特定情報とに基づいて当該道路情報を更新させるためのデータ構造。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-144467 | 2017-07-26 | ||
| JP2017-144380 | 2017-07-26 | ||
| JP2017144380A JP2019028533A (ja) | 2017-07-26 | 2017-07-26 | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 |
| JP2017-144470 | 2017-07-26 | ||
| JP2017144470A JP2019028542A (ja) | 2017-07-26 | 2017-07-26 | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 |
| JP2017144467A JP6760898B2 (ja) | 2017-07-26 | 2017-07-26 | 情報処理装置及び情報処理システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019022048A1 true WO2019022048A1 (ja) | 2019-01-31 |
Family
ID=65040237
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/027622 WO2019022048A1 (ja) | 2017-07-26 | 2018-07-24 | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2019022048A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009116741A (ja) * | 2007-11-08 | 2009-05-28 | Chugoku Electric Power Co Inc:The | 飛び出し警告システム及び飛び出し警告方法 |
| JP2009116753A (ja) * | 2007-11-08 | 2009-05-28 | Toyota Motor Corp | 衝突防止システム |
| JP2017107288A (ja) * | 2015-12-07 | 2017-06-15 | パナソニック株式会社 | 歩行者端末装置、歩車間通信システムおよび歩行者情報送信方法 |
-
2018
- 2018-07-24 WO PCT/JP2018/027622 patent/WO2019022048A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009116741A (ja) * | 2007-11-08 | 2009-05-28 | Chugoku Electric Power Co Inc:The | 飛び出し警告システム及び飛び出し警告方法 |
| JP2009116753A (ja) * | 2007-11-08 | 2009-05-28 | Toyota Motor Corp | 衝突防止システム |
| JP2017107288A (ja) * | 2015-12-07 | 2017-06-15 | パナソニック株式会社 | 歩行者端末装置、歩車間通信システムおよび歩行者情報送信方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6506834B2 (ja) | 車両制御 | |
| JP6760898B2 (ja) | 情報処理装置及び情報処理システム | |
| JP2016184276A (ja) | 携帯端末、携帯端末の制御方法、および、携帯端末用プログラム | |
| WO2018198926A1 (ja) | 電子機器、路側機、電子機器の動作方法および交通システム | |
| JP2019028542A (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| US10645535B2 (en) | Electronic apparatus, control device and computer-readable non-transitory recording medium for selectively transmitting information based on indoor/outdoor specification | |
| JP2019040551A (ja) | 情報処理装置、車両および路側機 | |
| JP6849571B2 (ja) | 路側機、通信システム、及び路側機の送信方法 | |
| JP6424100B2 (ja) | ナビゲーションシステム、ナビゲーション装置、グラス型デバイス及び装置間連携方法 | |
| JP6655526B2 (ja) | 電子機器、制御装置、制御プログラム及び電子機器の動作方法 | |
| JP2020154745A (ja) | 処理装置、路側機及び情報処理装置 | |
| JP6703936B2 (ja) | 電子機器、車両、制御装置、制御プログラム及び電子機器の動作方法 | |
| JP2019028533A (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| WO2019022048A1 (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| US10812950B2 (en) | Electronic apparatus, control device, computer-readable non-transitory recording medium and operation method of electronic apparatus | |
| JP7397575B2 (ja) | 信号機制御装置及び信号機制御方法 | |
| JP6849572B2 (ja) | 路側機、電子機器、路側機の送信方法及び電子機器の動作方法 | |
| JP6797476B2 (ja) | 電子機器、車両、制御装置、制御プログラム及び電子機器の動作方法 | |
| JP2020154393A (ja) | 携帯型電子機器、通信システム、サーバ装置、制御プログラム及び通信方法 | |
| US10841861B2 (en) | Electronic apparatus, method for controlling electronic apparatus, and storage medium | |
| JP7224958B2 (ja) | 通知装置及び通知方法 | |
| JP2019101473A (ja) | 処理システム及び処理装置 | |
| JP6752709B2 (ja) | 電子機器、電子機器の動作方法および制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18837193 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18837193 Country of ref document: EP Kind code of ref document: A1 |