JP6501406B2 - 測定装置、測定方法、プログラム、ならびに、情報記録媒体 - Google Patents
測定装置、測定方法、プログラム、ならびに、情報記録媒体 Download PDFInfo
- Publication number
- JP6501406B2 JP6501406B2 JP2016026361A JP2016026361A JP6501406B2 JP 6501406 B2 JP6501406 B2 JP 6501406B2 JP 2016026361 A JP2016026361 A JP 2016026361A JP 2016026361 A JP2016026361 A JP 2016026361A JP 6501406 B2 JP6501406 B2 JP 6501406B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- projectile
- acceleration sensor
- measured
- main
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 29
- 230000001133 acceleration Effects 0.000 claims description 284
- 238000005259 measurement Methods 0.000 claims description 53
- 239000013598 vector Substances 0.000 claims description 42
- 230000005484 gravity Effects 0.000 claims description 34
- 238000004891 communication Methods 0.000 claims description 26
- 238000007476 Maximum Likelihood Methods 0.000 claims description 12
- 238000006073 displacement reaction Methods 0.000 claims description 12
- 230000010365 information processing Effects 0.000 claims description 8
- 230000006870 function Effects 0.000 claims description 4
- 230000007423 decrease Effects 0.000 description 6
- 239000011159 matrix material Substances 0.000 description 6
- 239000000758 substrate Substances 0.000 description 5
- 230000010363 phase shift Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 239000011162 core material Substances 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000005674 electromagnetic induction Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000002945 steepest descent method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/18—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration in two or more dimensions
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B43/00—Balls with special arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P7/00—Measuring speed by integrating acceleration
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C1/00—Registering, indicating or recording the time of events or elapsed time, e.g. time-recorders for work people
- G07C1/22—Registering, indicating or recording the time of events or elapsed time, e.g. time-recorders for work people in connection with sports or games
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/30—Speed
- A63B2220/34—Angular speed
- A63B2220/35—Spin
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
- A63B2220/44—Angular acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
- A63B2225/52—Wireless data transmission, e.g. by radio transmitters or telemetry modulated by measured values
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Indicating Or Recording The Presence, Absence, Or Direction Of Movement (AREA)
- Gyroscopes (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Navigation (AREA)
Description
飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に主加速度センサが固定され、
前記重心から離間して前記飛翔体の内部に副加速度センサが固定され、
測定装置は、
前記飛翔体が飛翔する間に前記主加速度センサにより測定された主加速度と、前記飛翔体が飛翔する間に前記副加速度センサにより測定された副加速度と、を、取得し、
前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する。
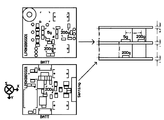
本実施形態においては、飛翔体の重心に測定ユニットが固定される。図1は、本発明の実施形態に係る飛翔体の内部に固定される測定ユニットおよび飛翔体の外部に用意される測定装置の概要構成を示す説明図である。以下、本図を参照して説明する。
飛翔体の外部に用意される測定装置201は、測定ユニット101から飛翔体が飛翔している間に測定された加速度を取得して、飛翔体の単位時間あたりの回転数等を推定する。この測定装置201は、典型的には、プログラムをコンピュータが実行することによって実現される。当該コンピュータは、各種の出力装置や入力装置に接続され、これらの機器と情報を送受する。
飛翔体内の特定位置の慣性座標系(地面に固定された座標系)における位置ベクトルxは、回転中心の位置ベクトルx0、回転中心からの飛翔体座標系における半径ベクトルr、回転軸ベクトルl、角速度ω、時刻t、に対する回転マトリックスMωtに対して、以下のように表現することができる。

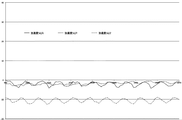
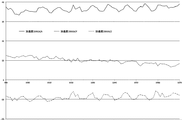
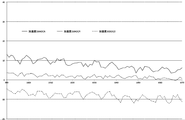
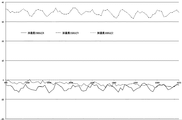
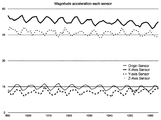
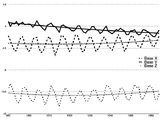
主加速度センサ102は、飛翔体の重心の近傍(所定の重心誤差範囲内)に固定されるが、飛翔体の回転中心は、主加速度センサ102からずれていることも多い。このため、主加速度センサ102および副加速度センサ103にて測定される主加速度、副加速度は、位相がずれている。
上記手法では、飛翔体座標系における回転軸ベクトルの各成分が計算されている。したがって、慣性座標系において飛翔体がどのような回転軸周りをまわっているか、は、慣性座標系と飛翔体座標系との間の座標変換が必要である。
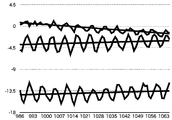
(1)上記手法によって求められた回転中心ならびに回転軸周りを各センサが回転していると想定した場合に観測されるべき加速度と、
(2)実際に観測される加速度と、
には、ずれが生じる。このずれは、抗力が時間変化していることに起因するものである。
k = (-Δu)/|Δu|
j = ad,s/|ad,s|
i = j×k
図8は、本実施形態に係る測定方法の実行手順を示すフローチャートである。以下、本図を参照して説明する。
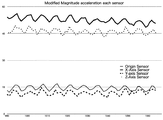
以下では、主加速度センサ102、副加速度センサ103の測定値を較正する手法について説明する。
(1)副加速度のX成分から主加速度のX成分を減算した値、
(2)副加速度のY成分から主加速度のY成分を減算した値、
(3)副加速度のZ成分から主加速度のZ成分を減算した値、
のいずれか少なくとも1つを高速フーリエ変換して、基本周波数を求めることにより、単位時間あたりの回転数(基本周波数の逆数)を得ることができる。3つを採用して結果に相違がある場合は、多数決によっていずれかを選択したり、平均をとったり、加速度の変化が最も大きい成分から得られたものを選択する等によって、単位時間あたりの回転数を求めることができる。
以上のように、本実施形態における測定装置は、
飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に固定された主加速度センサが、前記飛翔体が飛翔する間に測定した主加速度と、前記重心から離間して前記飛翔体の内部に固定された副加速度センサが、前記飛翔体が飛翔する間に測定した副加速度と、を、取得する取得部、
前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する推定部
を備える。
前記副加速度センサは、少なくとも3個の高加速度センサを含み、
前記主加速度センサから前記3個の高加速度センサへ向かう3個の変位ベクトルは、一次独立であり、
前記推定部は、前記飛翔体の角速度ベクトルを最尤推定する
ように構成することができる。
前記3個の変位ベクトルは、所定の方向誤差範囲内で直交し、
前記3個の変位ベクトルの大きさは、所定の長さ誤差範囲内で等しい
ように構成することができる。
前記主加速度センサにより測定可能な主加速度の大きさの範囲は、前記飛翔体が飛翔する間の前記重心の移動に係る加速度がとりうる範囲を含み、
前記副加速度センサにより測定可能な副加速度の大きさの範囲は、前記飛翔体が飛翔する間の前記飛翔体の回転に由来する加速度がとりうる範囲を含み、
前記副加速度センサにより測定可能な副加速度の大きさの範囲は、前記主加速度センサにより測定可能な主加速度の大きさの範囲よりも広い
ように構成することができる。
前記飛翔体が飛翔する間に前記主加速度センサおよび前記副加速度センサにより測定された主加速度および副加速度は、前記飛翔体の内部に配置された記憶装置に記録され、
前記取得部は、前記飛翔体の飛翔が終了した後に、近距離無線通信により、前記記録された主加速度および副加速度を、前記記憶装置から取得する
ように構成することができる。
前記飛翔体の内部に配置され、前記近距離無線通信、および、前記記憶装置への記録ならびに取得を制御する制御部は、前記近距離無線通信を介して給電された電力を充電し、当該充電された電力により動作する
ように構成することができる。
飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に固定された主加速度センサが、前記飛翔体が飛翔する間に、主加速度を測定し、
前記重心から離間して前記飛翔体の内部に固定された副加速度センサが、前記飛翔体が飛翔する間に、副加速度を測定し、
情報処理装置が、前記測定された主加速度と、前記測定された副加速度と、を、取得し、
前記情報処理装置が、前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する。
コンピュータを、
飛翔体が飛翔する間に前記飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に固定された主加速度センサにより測定された主加速度と、前記飛翔体が飛翔する間に前記重心から離間して前記飛翔体の内部に固定された副加速度センサにより測定された副加速度と、を、取得する取得部、
前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する推定部
として機能させる。
102 主加速度センサ
103 副加速度センサ
104 制御部
105 記憶装置
106 通信部
107 充電池
201 測定装置
202 取得部
203 推定部
Claims (9)
- 飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に固定された主加速度センサが、前記飛翔体が飛翔する間に測定した主加速度と、前記重心から離間して前記飛翔体の内部に固定された副加速度センサが、前記飛翔体が飛翔する間に測定した副加速度と、を、取得する取得部、
前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する推定部
を備えることを特徴とする測定装置。 - 前記副加速度センサは、少なくとも3個の高加速度センサを含み、
前記主加速度センサから前記3個の高加速度センサへ向かう3個の変位ベクトルは、一次独立であり、
前記推定部は、前記飛翔体の角速度ベクトルを最尤推定する
ことを特徴とする請求項1に記載の測定装置。 - 前記3個の変位ベクトルは、所定の方向誤差範囲内で直交し、
前記3個の変位ベクトルの大きさは、所定の長さ誤差範囲内で等しい
ことを特徴とする請求項2に記載の測定装置。 - 前記主加速度センサにより測定可能な主加速度の大きさの範囲は、前記飛翔体が飛翔する間の前記重心の移動に係る加速度がとりうる範囲を含み、
前記副加速度センサにより測定可能な副加速度の大きさの範囲は、前記飛翔体が飛翔する間の前記飛翔体の回転に由来する加速度がとりうる範囲を含み、
前記副加速度センサにより測定可能な副加速度の大きさの範囲は、前記主加速度センサにより測定可能な主加速度の大きさの範囲よりも広い
ことを特徴とする請求項1から3のいずれか1項に記載の測定装置。 - 前記飛翔体が飛翔する間に前記主加速度センサおよび前記副加速度センサにより測定された主加速度および副加速度は、前記飛翔体の内部に配置された記憶装置に記録され、
前記取得部は、前記飛翔体の飛翔が終了した後に、近距離無線通信により、前記記録された主加速度および副加速度を、前記記憶装置から取得する
ことを特徴とする請求項1から4のいずれか1項に記載の測定装置。 - 前記飛翔体の内部に配置され、前記近距離無線通信、および、前記記憶装置への記録ならびに取得を制御する制御部は、前記近距離無線通信を介して給電された電力を充電し、当該充電された電力により動作する
ことを特徴とする請求項5に記載の測定装置。 - 飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に固定された主加速度センサが、前記飛翔体が飛翔する間に、主加速度を測定し、
前記重心から離間して前記飛翔体の内部に固定された副加速度センサが、前記飛翔体が飛翔する間に、副加速度を測定し、
情報処理装置が、前記測定された主加速度と、前記測定された副加速度と、を、取得し、
前記情報処理装置が、前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する
をことを特徴とする測定方法。 - コンピュータを、
飛翔体が飛翔する間に前記飛翔体の重心もしくは当該重心から所定の重心誤差範囲内に固定された主加速度センサにより測定された主加速度と、前記飛翔体が飛翔する間に前記重心から離間して前記飛翔体の内部に固定された副加速度センサにより測定された副加速度と、を、取得する取得部、
前記取得された主加速度と、前記取得された副加速度と、から、前記飛翔体の単位時間当たりの回転数を最尤推定する推定部
として機能させることを特徴とするプログラム。 - 請求項8に記載のプログラムが記録された非一時的なコンピュータ読取可能な情報記録媒体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016026361A JP6501406B2 (ja) | 2016-02-15 | 2016-02-15 | 測定装置、測定方法、プログラム、ならびに、情報記録媒体 |
| US16/075,433 US11255874B2 (en) | 2016-02-15 | 2017-02-07 | Measurement apparatus, measurement method, program, and information recording medium |
| PCT/JP2017/004361 WO2017141766A1 (ja) | 2016-02-15 | 2017-02-07 | 測定装置、測定方法、プログラム、ならびに、情報記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016026361A JP6501406B2 (ja) | 2016-02-15 | 2016-02-15 | 測定装置、測定方法、プログラム、ならびに、情報記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017146129A JP2017146129A (ja) | 2017-08-24 |
| JP6501406B2 true JP6501406B2 (ja) | 2019-04-17 |
Family
ID=59625998
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016026361A Active JP6501406B2 (ja) | 2016-02-15 | 2016-02-15 | 測定装置、測定方法、プログラム、ならびに、情報記録媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11255874B2 (ja) |
| JP (1) | JP6501406B2 (ja) |
| WO (1) | WO2017141766A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019084009A (ja) * | 2017-11-06 | 2019-06-06 | 株式会社アクロディア | センサーを内蔵したボール、およびシステム |
| JP2021056002A (ja) * | 2018-02-06 | 2021-04-08 | アルプスアルパイン株式会社 | 較正装置、計測装置、球体、較正方法、およびプログラム |
| JP2021063655A (ja) * | 2018-02-09 | 2021-04-22 | アルプスアルパイン株式会社 | 制御装置、計測装置、球体、計測システム、制御方法、およびプログラム |
| JP7123750B2 (ja) * | 2018-05-07 | 2022-08-23 | 美津濃株式会社 | 解析装置、および解析システム |
| JP7375522B2 (ja) * | 2019-12-20 | 2023-11-08 | セイコーエプソン株式会社 | センサーユニット、電子機器および移動体 |
| JP2021168848A (ja) * | 2020-04-17 | 2021-10-28 | 住友ゴム工業株式会社 | ボールの挙動の解析装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8280682B2 (en) * | 2000-12-15 | 2012-10-02 | Tvipr, Llc | Device for monitoring movement of shipped goods |
| US6925413B2 (en) * | 2001-12-14 | 2005-08-02 | Robert Bosch Gmbh | Method and system for detecting a spatial movement state of moving objects |
| JP2007014671A (ja) * | 2005-07-11 | 2007-01-25 | Toppan Printing Co Ltd | ボールおよびその移動記録の認識・表示システム |
| JP2008073209A (ja) * | 2006-09-21 | 2008-04-03 | Seiko Epson Corp | 球技用のボール、その挙動評価支援装置、その挙動評価支援システム |
| JP5196581B2 (ja) * | 2009-04-22 | 2013-05-15 | 国立大学法人信州大学 | 球体の回転検出装置及び方法 |
| US8095250B2 (en) * | 2009-05-21 | 2012-01-10 | Honeywell International Inc. | Real-time compensation of inertial sensor bias errors under high spin rate conditions |
| JP2012042299A (ja) * | 2010-08-18 | 2012-03-01 | Chung-Hua Pan | 球体移動経路の測定方法 |
| JP5681936B2 (ja) * | 2010-09-08 | 2015-03-11 | 国立大学法人信州大学 | 球体の回転検出装置及び方法 |
| US9810549B2 (en) * | 2011-01-06 | 2017-11-07 | University Of Utah Research Foundation | Systems, methods, and apparatus for calibration of and three-dimensional tracking of intermittent motion with an inertial measurement unit |
| US20130073248A1 (en) * | 2011-09-20 | 2013-03-21 | Noel Perkins | Apparatus and method for employing miniature inertial measurement units for deducing forces and moments on bodies |
| DE102011056777B4 (de) * | 2011-12-21 | 2013-11-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Schwerpunktermittlung |
| EP2607849A1 (en) * | 2011-12-22 | 2013-06-26 | Tronics Microsystems S.A. | Multiaxial micro-electronic inertial sensor |
| GB201206827D0 (en) * | 2012-04-18 | 2012-05-30 | Jolliffe David V | Ball game apparatus |
| KR101193917B1 (ko) * | 2012-06-08 | 2012-10-29 | 한국항공우주연구원 | 가속도계를 이용한 구체의 회전속도 측정방법 |
-
2016
- 2016-02-15 JP JP2016026361A patent/JP6501406B2/ja active Active
-
2017
- 2017-02-07 WO PCT/JP2017/004361 patent/WO2017141766A1/ja active Application Filing
- 2017-02-07 US US16/075,433 patent/US11255874B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017141766A1 (ja) | 2017-08-24 |
| US20190041424A1 (en) | 2019-02-07 |
| JP2017146129A (ja) | 2017-08-24 |
| US11255874B2 (en) | 2022-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6501406B2 (ja) | 測定装置、測定方法、プログラム、ならびに、情報記録媒体 | |
| US11173362B2 (en) | Analysis apparatus, analysis method, and recording medium | |
| US10252106B2 (en) | Golf swing analysis apparatus and golf club fitting apparatus | |
| US9079057B2 (en) | Fitting system for a golf club | |
| JP6776882B2 (ja) | 運動解析装置、方法及びプログラム | |
| JP6054331B2 (ja) | ゴルフクラブ用の改善されたフィッティングシステム | |
| JP2013009771A (ja) | ゴルフスイング時のヘッドの挙動の計測解析システム、計測解析方法、及びプログラム | |
| JP6672617B2 (ja) | ゴルフクラブのフィッティング装置、方法及びプログラム | |
| US10456621B2 (en) | Impact point estimation apparatus | |
| KR20140074844A (ko) | 골프 클럽을 위한 개선된 피팅 시스템 | |
| JP6876466B2 (ja) | 計測システムおよび計測方法 | |
| EP3879490A1 (en) | Stroke decision device, stroke decision method, stroke decision program, and ball returning robot | |
| JP5823767B2 (ja) | ゴルフスイングの計測解析システム及び計測解析方法 | |
| US11623125B2 (en) | Rotation estimation device, rotation estimation method, recording medium stored with rotation estimation program, trajectory prediction device, trajectory prediction method, recording medium stored with trajectory prediction program, and ball-returning robot | |
| JP6766335B2 (ja) | ゴルフスイングの分析装置 | |
| JP6697850B2 (ja) | ゴルフボールの弾道予測方法、ゴルフボールの弾道予測装置及びゴルフクラブの選定方法 | |
| JP6697851B2 (ja) | ゴルフボールの弾道予測方法、ゴルフボールの弾道予測装置及びゴルフクラブの選定方法 | |
| JP6373736B2 (ja) | ゴルフクラブのフィッティング装置、方法及びプログラム | |
| KR102031382B1 (ko) | 센서가 구비된 스윙 측정 골프 클럽 | |
| US20160030803A1 (en) | Golf club fitting apparatus | |
| JP6897447B2 (ja) | 弾性体の挙動の解析装置 | |
| JP7079088B2 (ja) | 計測システムおよび計測方法 | |
| JP7005987B2 (ja) | ゴルフスイング表示システム、情報処理装置及び方法 | |
| JP6984326B2 (ja) | 打具のフィッティング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6501406 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |