JP6463077B2 - マッサージ機 - Google Patents
マッサージ機 Download PDFInfo
- Publication number
- JP6463077B2 JP6463077B2 JP2014217325A JP2014217325A JP6463077B2 JP 6463077 B2 JP6463077 B2 JP 6463077B2 JP 2014217325 A JP2014217325 A JP 2014217325A JP 2014217325 A JP2014217325 A JP 2014217325A JP 6463077 B2 JP6463077 B2 JP 6463077B2
- Authority
- JP
- Japan
- Prior art keywords
- massage
- unit
- massage unit
- sensor
- units
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011282 treatment Methods 0.000 claims description 183
- 238000001514 detection method Methods 0.000 claims description 8
- 230000000630 rising effect Effects 0.000 claims description 3
- 230000007246 mechanism Effects 0.000 description 253
- 238000004898 kneading Methods 0.000 description 35
- 238000010586 diagram Methods 0.000 description 19
- 230000003028 elevating effect Effects 0.000 description 15
- 230000035807 sensation Effects 0.000 description 11
- 230000000694 effects Effects 0.000 description 9
- 238000000926 separation method Methods 0.000 description 9
- 230000009471 action Effects 0.000 description 6
- 210000003811 finger Anatomy 0.000 description 6
- 238000010079 rubber tapping Methods 0.000 description 6
- 210000003813 thumb Anatomy 0.000 description 6
- 210000002414 leg Anatomy 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 239000003638 chemical reducing agent Substances 0.000 description 4
- 210000003205 muscle Anatomy 0.000 description 4
- 230000002265 prevention Effects 0.000 description 4
- 230000003014 reinforcing effect Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 210000004247 hand Anatomy 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000001225 therapeutic effect Effects 0.000 description 3
- 208000003251 Pruritus Diseases 0.000 description 2
- 230000017531 blood circulation Effects 0.000 description 2
- 210000001217 buttock Anatomy 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000007803 itching Effects 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 210000000689 upper leg Anatomy 0.000 description 2
- 206010050031 Muscle strain Diseases 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 210000000245 forearm Anatomy 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images
































Landscapes
- Massaging Devices (AREA)
Description
このような構成とすることにより、使用者が所望する位置(施療部位)にマッサージユニットを移動させても、センサが機能することにより、第1マッサージユニットと第2マッサージユニットが所定の相対位置となったことを検出することができる。これにより例えば、第1マッサージユニットと第2マッサージユニットを所定の相対位置として一体的に昇降させたり、マッサージユニットの衝突を適切に回避したりすることができる。
また、このような構成とすることにより、第1マッサージユニットと第2マッサージユニットの相対位置の検出範囲が広がる。
また、第1マッサージユニットと第2マッサージユニットが所定の相対位置となったことを検出する精度が更に高まり、例えば、マッサージユニットの衝突防止の精度が高まる。
このような構成とすることにより、第1マッサージユニットと第2マッサージユニットの相対位置の検出範囲が広がる。
このような構成とすることにより、マッサージユニットの衝突防止の精度が更に高まる。しかも、両マッサージユニットを近づけた状態としながらスムーズに上昇又は下降させることができる。
このような構成とすることにより、マッサージユニットの衝突防止の精度が更に高まる。しかも、両マッサージユニットを近づけた状態としながらスムーズに上昇又は下降させることができる。
このような構成とすることにより、マッサージユニットの衝突を適切に回避することができる。
以下、本発明のマッサージ機1の全体構成について説明する。図1は本発明の一実施形態に係るマッサージ機1の斜視図である。図2はマッサージ機1の機能ブロック図である。図3は背凭れ部3の正面図である。なお、以下の説明で用いる方向の概念は、図1に示す起立姿勢のマッサージ機1に着座した使用者から見たときの方向の概念と一致するものとし、その他の場合は適宜説明するものとする。
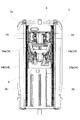
図1及び図3に示すとおり、背凭れ部3は、正面視で門型に形成された樹脂等よりなる背フレーム3aと、背フレーム3aに組み付けられたマッサージユニット8,9の昇降をガイドするガイド機構3bと、背フレーム3aの前面側に配置されるクッション性を有する背パッド3cと、により構成されている。ガイド機構3bは、身長方向に沿って延設されており、上部及び下部がそれぞれ中部より前方に位置するよう湾曲している(図21参照)。また、前側にラックが形成され、後側にレールが形成されている。そして、複数のマッサージユニット8,9が、このガイド機構3bに昇降可能として支持されている。
以下、マッサージユニット8,9の構成について説明する。
図4は第1マッサージユニット8の斜視図である。図5は部材の一部を省略した第1マッサージユニット8の斜視図である。図6は第1マッサージユニット8の正面図である。図7は第1マッサージユニット8の側面図であり、第1マッサージ機構31が後退した状態を示している。図8は第1マッサージユニット8の側面図であり、第1マッサージ機構31が進出した状態を示している。図9は(a)に示す揉み軸41と(b)に示す叩き軸42の正面図である。図10は第2マッサージユニット9の斜視図である。図11は部材の一部を省略した第2マッサージユニット9の斜視図である。図12は第2マッサージユニット9の正面図である。図13は第2マッサージユニット9の側面であり、第2マッサージ機構51が後退した状態を示している。図14は第2マッサージユニット9の側面であり、第2マッサージ機構51が進出した状態を示している。図15は第2マッサージユニット9のアーム60の斜視図である。
図4〜図8に示すとおり、本体フレーム30は、後壁30aと、後壁30aの左右両側から立設された側壁30bと、後壁30aの下部から立設された底壁30cと、後壁30aの上部から立設された上壁30dと、により前方が開口した箱型に構成されている。また、本体フレーム30の内部上方には、第1マッサージユニット8を昇降させるための昇降モータ35と、左右方向に延びる昇降軸36と、昇降モータ35の回転を減速して昇降軸36に伝達する減速器37と、により構成される昇降機構が収容されている。昇降軸36は、両側壁30bに回転可能として支持されている。側壁30bには、上部にガイドローラ38と昇降軸36に取り付けられたピニオン39が設けられ、下部にガイドローラ38とピニオン39が設けられている。ピニオン39とガイドローラ38によりガイド機構3bを挟持しており、昇降モータ35を駆動すると第1マッサージユニット8は身長方向に沿って昇降することができる。第1マッサージユニット8の上部に昇降機構を配置しているため、施療子34を第2マッサージ機構51の施療子54(上施療子54a)に近接させることができる。
図9〜図15に示すとおり、本体フレーム50は、後壁50aと、後壁50aの左右両側から立設された側壁50bと、後壁50aの下部から立設された底壁50cと、後壁50aの上部から立設された上壁50dと、により前方が開口した箱型に構成されている。また、本体フレーム50の内部下方には、第2マッサージユニット9を昇降させるための昇降モータ55と、左右方向に延びる昇降軸56と、昇降モータ55の回転を減速して昇降軸56に伝達する減速器57と、により構成される昇降機構が収容されている。昇降軸56は、両側壁50bに回転可能として支持されている。側壁50bには、下部にガイドローラ58と昇降軸56に取り付けられたピニオン59が設けられ、上部にガイドローラ58とピニオン59が設けられている。ピニオン59とガイドローラ58によりガイド機構3bを挟持しており、昇降モータ55を駆動すると第2マッサージユニット9は身長方向に沿って昇降することができる。第2マッサージユニット9の下部に昇降機構を配置しているため、施療子54(上施療子54a)を第1マッサージ機構31の施療子34に近接させることができる。
図2に示すとおり、マッサージ機1は、第1マッサージユニット8と第2マッサージユニット9の相対位置を検出するセンサ70を有している。以下、このセンサ70について詳述する。
両マッサージユニット8,9が互いに近づく方向に移動しているときに、両マッサージユニット8,9が所定の相対位置(例えば、近接状態又は近接前状態)となったことを検出した場合は、サブ制御部25は昇降モータ35の駆動を停止又は反転するよう制御し、サブ制御部26は昇降モータ55の駆動を停止又は反転するよう制御する。また、各サブ制御部25,26は、メイン制御部24に上記制御を行ったことを伝達する。このようにして、両マッサージユニット8,9の衝突が回避される。
以下、揉み動作について詳述する。
図16は揉み動作の説明図である。図17は揉み動作の説明図であり、(a)はマッサージユニット8の昇降を停止した状態での揉み動作、(b)はマッサージユニット8を下降させながらの揉み動作、(c)はマッサージユニット8を上昇させながらの揉み動作を示している。図18は揉み動作の説明図であり、(a)はマッサージユニット8の昇降を停止した状態での揉み動作、(b)はマッサージユニット8を上昇させながらの揉み動作、(c)はマッサージユニット8を下降させながらの揉み動作を示している。図19は揉み動作の説明図である。なお、図16及び図19では、第1マッサージユニット8を首位置に配置し、第2マッサージユニット9を肩位置に配置した状態を示している。
図20は動作1のフロー図である。図21は動作1の説明図であり、(a)は第1マッサージ機構31が進出し第2マッサージ機構51が後退した状態、(b)は第1マッサージ機構31が後退し第2マッサージ機構51が進出した状態を示している。
動作1は、第1マッサージ機構31と第2マッサージ機構51を、タイミングをずらして進退させる動作であり、マッサージモータ43,63の駆動による施療子34,54の動作を含めることが好ましい。以下、図21に示すとおり、第1マッサージユニット8を首位置に配置し、第2マッサージユニット9を肩の背面位置に配置した状態で、動作1を行う場合について例示する。
図22は動作2及び動作3のフロー図である。図23は動作2及び動作3の説明図であり、(a)は第1及び第2マッサージ機構31,51が後退した状態、(b)は第1及び第2マッサージ機構31,51が進出した状態、(c)は第1マッサージ機構31が進出し第2マッサージ機構51が後退した状態を示している。なお、図23において、斜線を付した施療子34,54a,54bは進出した状態を示しており、斜線を付していない施療子34,54a,54bは後退した状態を示している。
動作3は、第1マッサージ機構31の施療子34と第2マッサージ機構51の施療子54について、左右方向における位置を異ならせ、かつ進出させた状態から一方のマッサージ機構の施療子を後退させる動作である。以下、図22に示すとおり、動作2に引き続いて動作3を行う場合について例示する。
図24は動作4の説明図である。なお、図24においては、理解を容易にするために、下施療子54bの図示を省略している。
動作4は、第1マッサージ機構31の施療子34と第2マッサージ機構51の施療子54について、それぞれ異なる速度で揉み動作を行う動作であり、各マッサージ機構31,51を身長方向において近接した状態として行うことが好ましい。
図25は動作5の説明図であり、(a)は第1及び第2マッサージ機構31,51が後退した状態、(b)は第1マッサージ機構31が後退し第2マッサージ機構51が進出した状態を示している。
図25に示すとおり、動作5は、第1マッサージユニット8を肩位置に配置し、第2マッサージユニット9を腰位置に配置した状態で、第2マッサージ機構51を進出させる動作であり、マッサージモータ43の駆動による施療子34の動作を含めることが好ましい。第2マッサージ機構51を腰位置で進出させることにより、腰が前方に押し出されて上半身が仰け反るような姿勢となる。従って、第1マッサージ機構31の施療子34に肩が強く当接する。このとき第1マッサージ機構31の施療子34に揉み動作又は叩き動作を行わせていれば、マッサージ効果が高まる。
図26は動作6の説明図であり、(a)は第1マッサージユニット8が肩位置に配置され第2マッサージユニット9が腰位置に配置された状態、(b)は第1マッサージユニット8が肩位置に配置され第2マッサージユニット9が背中位置まで上昇した状態を示している。
図26に示すとおり、動作6は、第1マッサージユニット8を肩位置に配置した状態で、第2マッサージユニット9を身長方向に上昇させる動作であり、マッサージモータ43の駆動による施療子34の動作を含めることが好ましい。第2マッサージユニット9を上昇させることにより、上半身が持ち上げられる。従って、第1マッサージ機構31の施療子34に肩が強く当接する。このとき第1マッサージ機構31の施療子34に揉み動作又は叩き動作を行わせていれば、マッサージ効果が高まる。
図27は動作7の説明図であり、(a)は第1マッサージ機構31が進出して首を挟持し第2マッサージ機構51が肩位置に配置された状態、(b)は第1マッサージ機構31が進出して首を挟持し第2マッサージ機構51が腰位置まで下降した状態を示している。
動作7は、一方のマッサージ機構の対の施療子により被施療部を挟持した状態で、他方のマッサージ機構を身長方向に上昇又は下降させる動作である。図27に示す例では、第1マッサージ機構31を進出させ対の施療子34を近接させて首を挟持した状態で、第2マッサージユニット9を下降させている。第2マッサージユニット9を下降させることにより、上半身が下方へ引っ張られる。従って、首は第1マッサージ機構31の施療子34により挟持されているため、首を伸ばすストレッチ効果を得ることができる。また、第1マッサージ機構により首を挟持した状態で、第2マッサージユニット9に上昇及び下降を繰り返し行わせれば、あたかもマッサージ師が一方の手を添えて首を固定した状態で、他方の手で被施療部をさすったり伸ばしたりするかのような体感を得ることができる。
図28は動作8の説明図であり、(a)は第1マッサージ機構31が揉み動作を行い、第2マッサージ機構51が上昇過程の状態であり、(b)は第1マッサージ機構31が揉み動作を行い、第2マッサージ機構51が下降過程の状態を示している。動作8は、一方のマッサージ機構に揉み動作又は叩き動作を行わせ、他方のマッサージ機構を上昇又は下降させる動作である。以下、図28に基づいて、第1マッサージ機構31を前記一方のマッサージ機構として揉み動作を行わせ、第2マッサージ機構51を前記他方のマッサージ機構として上昇又は下降させる場合について例示する。
図29は動作9及び動作10のフロー図である。
動作9は、第1マッサージ機構31と第2マッサージ機構51を身長方向に沿って互いに近接する方向に移動させる動作と、第1及び第2マッサージ機構31,51の施療子34,54を被施療部に対して進出させる動作と、を同期させる動作である。図29に示すとおり、まず各マッサージユニット8,9を互いに近接する方向に移動させる(ステップS1)。このステップS1の動作は、各マッサージユニット8,9の相対位置が近接状態又は近接前状態となるまで継続して行われる。ステップS1の完了後、又はステップS1と並行して、第1及び第2マッサージ機構31,51の施療子34,54を進出させる(ステップS2)。このように動作させることにより、マッサージ機構31,51の身長方向に沿った移動により背筋が伸ばされつつ、施療子34,54の進出により上半身を反らすことができ、マッサージ効果が高まる。そして、ステップS2の完了後に、第1及び第2マッサージ機構31,51の施療子34,54を後退させる(ステップS3)。なお、ステップS1においては、腰位置を目標位置として第1及び第2マッサージ機構31,51を互いに近接させていくのが好ましく、この場合は上半身を反らす効果が高まる。
動作10は、第1マッサージ機構31と第2マッサージ機構51を身長方向に沿って互いに離反する方向に移動させる動作と、第1及び第2マッサージ機構31,51の施療子34,54を被施療部に対して進出させる動作と、を同期させる動作である。以下、図29に示すとおり、動作9に引き続いて動作10を行う場合について例示する。
動作9のステップS3に引き続いて、近接状態又は近接前状態にある第1及び第2マッサージユニット8,9を互いに離反する方向に移動させる(ステップS4)。このステップS4の動作は、第1マッサージユニット8が首位置となり、第2マッサージユニット9が昇降範囲の下限位置となるまで継続して行われる。そして、ステップS4と並行して、第1及び第2マッサージ機構31,51の施療子34,54を進出させる(ステップS5)。このように動作させることにより、施療子34,54の進出により上半身を反らしながら、マッサージ機構31,51の身長方向に沿った離反動作により上半身を引き伸ばすことができ、マッサージ効果が高まる。
以下、他の実施形態に係るマッサージユニット100について説明する。図30は他の実施形態に係るマッサージユニット100の正面図である。マッサージユニット100は、前述したマッサージ機構31及び第2マッサージ機構51をまとめて単一の本体フレーム110に設けている。すなわち、マッサージ機構31,51及びマッサージ機構31,51を支持する支持フレーム32,52は、前述した構成と同一であるため、以下では同一符号を付してその説明を省略する。
以下、他の実施形態に係るマッサージ機構200について説明する。図31は他の実施形態に係るマッサージ機構200の正面図である。
前述した第1マッサージ機構31と本質的に異なる点は、マッサージ機構200はアーム90の上下に施療子91が設けられているとともに、下側の施療子91はアーム90を挟んで左右に設けられている点である。その他の構成は、第1マッサージ機構31と同一であるため、以下では同一符号を付してその説明を省略する。
以下、他の実施形態に係るリンク93について、第1マッサージユニット8に適用した場合を例示して説明するが、第2マッサージユニット9にも適用できる。図32は他の実施形態に係るリンク93の説明図であり、(a)はマッサージ機構31が後退した状態、(b)はマッサージ機構31が進出した状態を示している。なお、以下では、前述したリンク33を備えた第1マッサージユニット8に対応する部材には、同一の符号を付してその説明を省略する。
以下、第1マッサージユニット8と第2マッサージユニット9の相対位置を検出するセンサ80に関し、他の実施形態を図33に基づいて説明する。図33は他の実施形態に係るセンサ80の説明図である。
このセンサ80は、第1マッサージユニット8の上下位置を検出する第3センサ部(昇降センサ77)と、第2マッサージユニット9の上下位置を検出する第4センサ部(昇降センサ78)と、により構成されている。そして、昇降センサ77により検出された第1マッサージユニット8の上下位置(高さ)を示す検出値(図33では高さ「7」)と、昇降センサ78により検出された第2マッサージユニット9の上下位置(高さ)を示す検出値(図33では高さ「6」)と、の差分値(図33では差分値「1」)に基づいて、第1及び第2マッサージユニット8,9の相対位置を検出する。すなわち、この差分値が小さいほど両マッサージユニット8,9の間隔は狭く、差分値が大きいほど両マッサージユニット8,9の間隔は広い。例えば、差分値が「1」の相対位置を近接状態とし、差分値が「2」の相対位置を近接前状態と設定すればよい。
例えば、施療子の個数に制約はなく、第1マッサージ機構31の施療子34を第2マッサージ機構51と同様に、上下方向に複数としてもよい。また、前述した実施形態では、施療子を支持するアームは左右一対としたが、身体の中心線を挟んで左右複数対としてもよいし、1つのアームに対して左右方向に複数の施療子を設けてもよい。また、身長方向に沿って設けるマッサージユニットの個数に制約はなく、3つ以上であってもよい。
また、前述した動作1〜8の観点から見れば、マッサージユニット8,9を身長方向に複数設けていればよく、揉み動作における左右方向の動作範囲W1,W2、揉み動作の軌跡の上下寸法H1,H2、又は揉み動作において最も近接したときの対の施療子の離隔距離D1,D2は、第1マッサージ機構31と第2マッサージ機構51とで同じであってもよい。
また、ガイド機構3bを座部2あるいは座部2及びフットレスト4にも設け、第1及び第2マッサージユニット8,9のうち少なくともいずれか一方を、身長方向に沿って背凭れ部3から座部2又はフットレスト4まで移動可能としてもよい。
3 背凭れ部
8 第1マッサージユニット(マッサージユニット)
9 第2マッサージユニット(マッサージユニット)
15 進退エアセル(進退駆動部)
16 進退エアセル(進退駆動部)
23 制御手段
30 本体フレーム
30b 側壁
31 第1マッサージ機構(マッサージ機構)
32 支持フレーム
33 リンク
33a 第1リンク部
33b 第2リンク部
34 施療子
35 昇降モータ
36 昇降軸
40 アーム
43 マッサージモータ(マッサージ駆動部)
48 補強部
50 本体フレーム
50b 側壁
51 第2マッサージ機構(マッサージ機構)
52 支持フレーム
53 リンク
53a 第1リンク部
53b 第2リンク部
54 施療子
55 昇降モータ
56 昇降軸
63 マッサージモータ(マッサージ駆動部)
68 補強部
70 センサ
71 第1センサ部
72 第2センサ部
77 昇降センサ(第3センサ部)
78 昇降センサ(第4センサ部)
80 センサ
90 アーム
91 施療子
91a 上施療子
91b 下施療子
93 リンク
93a 第1リンク部
93b 第2リンク部
100 マッサージユニット
200 第1マッサージ機構(マッサージ機構)
D1 揉み動作において最も近接したときの対の施療子の離隔距離
D2 揉み動作において最も近接したときの対の施療子の離隔距離
H1 揉み動作の軌跡の上下寸法
H2 揉み動作の軌跡の上下寸法
W1 揉み動作における施療子の左右方向の動作範囲
W2 揉み動作における施療子の左右方向の動作範囲
Claims (5)
- 被施療部をマッサージするマッサージユニットが、身長方向に沿って複数設けられたマッサージ機において、
前記マッサージユニットとして、相対的に上側に配置される第1マッサージユニットと、相対的に下側に配置される第2マッサージユニットと、
前記マッサージユニットの動作を制御する制御手段と、を有し、
前記第1及び第2マッサージユニットのうち少なくとも一方のマッサージユニットは、身長方向に昇降可能であり、
前記第1マッサージユニットと前記第2マッサージユニットの相対位置を検出するセンサを有し、
前記第1及び第2マッサージユニットは、身長方向に独立して昇降可能であり、
前記第1及び第2マッサージユニットの身長方向における位置を変更することにより、前記第1又は第2マッサージユニットによって同一の被施療部をマッサージ可能であり、
前記センサは、前記相対位置として第1及び第2マッサージユニットの間隔を複数段階検出することができ、
前記複数段階は、少なくとも前記第1及び第2マッサージユニットの間隔が所定距離まで近づいた近接状態と、この近接状態よりも若干離反した近接前状態の2段階の状態を有し、
前記センサは、前記第1マッサージユニットに対する前記第2マッサージユニットの近接を検出する第1センサ部と、前記第2マッサージユニットに対する前記第1マッサージユニットの近接を検出する第2センサ部と、を有することを特徴とするマッサージ機。 - 前記センサは、前記第1マッサージユニットの上下位置を検出する第3センサ部と、前記第2マッサージユニットの上下位置を検出する第4センサ部と、を有し、
前記制御手段は、前記第3センサ部と前記第4センサ部による検出値の差分値を算出し、前記差分値に基づいて前記相対位置を検出することを特徴とする請求項1に記載のマッサージ機。 - 前記制御手段は、前記第1及び第2マッサージユニットが同一方向へ上昇又は下降する際、進行方向前側のマッサージユニットの昇降速度は、進行方向後側のマッサージユニットの昇降速度よりも速くなるように制御することを特徴とする請求項1又は2に記載のマッサージ機。
- 前記制御手段は、前記第1及び第2マッサージユニットが同一方向へ上昇又は下降する際、進行方向前側のマッサージユニットが進行方向後側のマッサージユニットよりも先に移動を開始するよう制御することを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
- 前記制御手段は、一方のマッサージユニットが他方のマッサージユニットに近づく方向に上昇又は下降している際に両マッサージユニットの間隔が所定距離となったことを検出すると、一方のマッサージユニットの移動を停止する、又は一方のマッサージユニットを他方のマッサージユニットから離反させるよう制御することを特徴とする請求項1〜4のいずれかに記載のマッサージ機。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014217325A JP6463077B2 (ja) | 2014-10-24 | 2014-10-24 | マッサージ機 |
| PCT/JP2015/068037 WO2016063574A1 (ja) | 2014-10-24 | 2015-06-23 | マッサージ機 |
| CN201580055724.9A CN107072868B (zh) | 2014-10-24 | 2015-06-23 | 按摩机 |
| CN201910180593.7A CN110063879B (zh) | 2014-10-24 | 2015-06-23 | 按摩机 |
| US15/494,281 US10966900B2 (en) | 2014-10-24 | 2017-04-21 | Massage machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014217325A JP6463077B2 (ja) | 2014-10-24 | 2014-10-24 | マッサージ機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016083104A JP2016083104A (ja) | 2016-05-19 |
| JP2016083104A5 JP2016083104A5 (ja) | 2017-11-16 |
| JP6463077B2 true JP6463077B2 (ja) | 2019-01-30 |
Family
ID=55971402
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014217325A Active JP6463077B2 (ja) | 2014-10-24 | 2014-10-24 | マッサージ機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6463077B2 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3201173B2 (ja) * | 1994-10-06 | 2001-08-20 | 株式会社明電舎 | 自動走行台車 |
| JPH11128303A (ja) * | 1997-10-31 | 1999-05-18 | Sanyo Electric Co Ltd | 椅子式マッサージ機 |
| JP2007006944A (ja) * | 2005-06-28 | 2007-01-18 | Family Co Ltd | 椅子型マッサージ機用の操作装置 |
| JP2009089872A (ja) * | 2007-10-09 | 2009-04-30 | Family Co Ltd | 椅子型マッサージ機 |
| JP5408744B2 (ja) * | 2011-12-28 | 2014-02-05 | 日立マクセル株式会社 | マッサージ機 |
| JP5981788B2 (ja) * | 2012-06-29 | 2016-08-31 | 日立マクセル株式会社 | マッサージ機 |
-
2014
- 2014-10-24 JP JP2014217325A patent/JP6463077B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016083104A (ja) | 2016-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7053072B2 (ja) | マッサージ機 | |
| CN107072868B (zh) | 按摩机 | |
| JP5981788B2 (ja) | マッサージ機 | |
| WO2016063574A1 (ja) | マッサージ機 | |
| JP2007021036A (ja) | マッサージ機 | |
| JP6445835B2 (ja) | マッサージユニット及びマッサージ機 | |
| JP6322370B2 (ja) | マッサージ機 | |
| JP6463076B2 (ja) | マッサージ機 | |
| JP6499820B2 (ja) | マッサージ機 | |
| JP6463077B2 (ja) | マッサージ機 | |
| JP6997072B2 (ja) | マッサージ機 | |
| JP6436726B2 (ja) | 駆動機構 | |
| JP2018047314A (ja) | マッサージ機 | |
| JP5815104B2 (ja) | マッサージ機 | |
| JP6289022B2 (ja) | マッサージ部 | |
| JP2017158834A (ja) | マッサージ機 | |
| JP6991698B2 (ja) | マッサージ機 | |
| JP2018029742A (ja) | マッサージ機 | |
| JP5800355B2 (ja) | 椅子型マッサージ機 | |
| JP7352280B2 (ja) | マッサージ機 | |
| JP2018047293A (ja) | マッサージ機 | |
| JP2015016042A (ja) | 椅子型マッサージ機 | |
| JP6960145B2 (ja) | マッサージ機 | |
| JP5873723B2 (ja) | マッサージ機 | |
| JP2020099521A (ja) | マッサージ機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171006 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6463077 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |