JP6426643B2 - 無人飛行体用の線状体繰出装置 - Google Patents
無人飛行体用の線状体繰出装置 Download PDFInfo
- Publication number
- JP6426643B2 JP6426643B2 JP2016053889A JP2016053889A JP6426643B2 JP 6426643 B2 JP6426643 B2 JP 6426643B2 JP 2016053889 A JP2016053889 A JP 2016053889A JP 2016053889 A JP2016053889 A JP 2016053889A JP 6426643 B2 JP6426643 B2 JP 6426643B2
- Authority
- JP
- Japan
- Prior art keywords
- linear body
- tension
- unmanned air
- linear
- unmanned
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004804 winding Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000005491 wire drawing Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images


Landscapes
- Tension Adjustment In Filamentary Materials (AREA)
- Electric Cable Installation (AREA)
- Electric Cable Arrangement Between Relatively Moving Parts (AREA)
- Unwinding Of Filamentary Materials (AREA)
Description
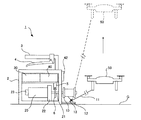
10 リール
11 線状体
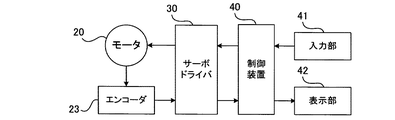
20 駆動モータ
40 制御装置
50 無人飛行体
Claims (4)
- 回転可能に支持されて線状体が巻回されたリールと、前記リールを回転駆動する駆動モータと、前記駆動モータの駆動を制御する制御手段とを備え、
無人飛行体に前記線状体の先端部を接続するか、あるいは、無人飛行体に搭載して使用する線状体繰出装置であって、
前記制御手段は、前記リールから繰り出される前記線状体の繰り出し長さが長くなると前記線状体に作用する張力が増加するように、前記駆動モータの駆動を制御する無人飛行体用の線状体繰出装置。 - 前記制御手段は、前記線状体の繰り出し長さと張力指令値との関係を示す張力指令テーブルに基づいて、前記繰り出し長さが基準長さ以上になると、前記線状体に作用させる張力を増加する請求項1に記載の無人飛行体用の線状体繰出装置。
- 前記張力指令テーブルは、前記繰り出し長さと前記張力との関係が無人飛行体の重量毎に設定されており、
前記制御手段は、入力された無人飛行体の重量に基づいて前記線状体に作用する張力を決定する請求項2に記載の無人飛行体用の線状体繰出装置。 - 前記線状体は、地上と前記無人飛行体との間で有線による電力供給を行うことができる給電ケーブル、または、地上と前記無人飛行体との間で有線による通信を行うことができる信号ケーブルである請求項1から3のいずれかに記載の無人飛行体用の線状体繰出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016053889A JP6426643B2 (ja) | 2016-03-17 | 2016-03-17 | 無人飛行体用の線状体繰出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016053889A JP6426643B2 (ja) | 2016-03-17 | 2016-03-17 | 無人飛行体用の線状体繰出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017169395A JP2017169395A (ja) | 2017-09-21 |
| JP2017169395A5 JP2017169395A5 (ja) | 2018-09-06 |
| JP6426643B2 true JP6426643B2 (ja) | 2018-11-21 |
Family
ID=59914005
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016053889A Active JP6426643B2 (ja) | 2016-03-17 | 2016-03-17 | 無人飛行体用の線状体繰出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6426643B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11186364B2 (en) | 2018-07-03 | 2021-11-30 | Panasonic Intellectual Property Management Co., Ltd. | Information processing method, control device, and mobile tethering body |
| US11325703B2 (en) | 2018-07-09 | 2022-05-10 | Panasonic Intellectual Property Management Co., Ltd. | Control device, information processing method, and tethering device |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6332706B2 (ja) * | 2016-10-28 | 2018-05-30 | 株式会社エアロネクスト | 空撮用回転翼機 |
| JP2021014129A (ja) * | 2017-10-16 | 2021-02-12 | 株式会社ハイボット | ワイヤ張力式飛行体 |
| JP6964012B2 (ja) * | 2018-02-16 | 2021-11-10 | グローブライド株式会社 | 飛行体ウインチ制御装置及び飛行体 |
| JP6981893B2 (ja) * | 2018-02-16 | 2021-12-17 | グローブライド株式会社 | 飛行体ウインチデータ表示システム及び飛行体並びにウインチデータ処理方法 |
| JP2019156241A (ja) * | 2018-03-14 | 2019-09-19 | 株式会社フカデン | リール装置及び飛行体システム |
| JP7061358B2 (ja) * | 2018-03-15 | 2022-04-28 | 株式会社フカデン | 飛行体システム |
| WO2019186621A1 (ja) * | 2018-03-26 | 2019-10-03 | 株式会社ドローンネット | 吊下装置を備えた撮影用無人飛行体 |
| JP6830663B2 (ja) * | 2018-04-18 | 2021-02-17 | 株式会社エアロネクスト | 空撮用回転翼機 |
| WO2020008582A1 (ja) * | 2018-07-05 | 2020-01-09 | 株式会社ドローンネット | 吊下装置を備えた撮影用無人飛行体 |
| JP7085438B2 (ja) * | 2018-07-31 | 2022-06-16 | 三菱重工業株式会社 | 移動体およびケーブルリール取付方法 |
| KR102159524B1 (ko) * | 2018-09-15 | 2020-09-24 | 한남대학교 산학협력단 | 기계식 브레이크 장치 및 이를 이용한 기계식 브레이크 시스템 |
| CN109607331B (zh) * | 2019-02-13 | 2024-02-27 | 深圳市赛为智能股份有限公司 | 一种系留无人机收放线缓冲结构及其工作方法 |
| CN111864632B (zh) * | 2019-06-03 | 2021-05-28 | 山东道永盛信息科技有限公司 | 一种针对解除电缆表层结冰以及电缆之间缠绕的维护装置 |
| CN110436257B (zh) * | 2019-08-16 | 2020-09-18 | 国网江苏省电力有限公司扬州供电分公司 | 一种供电施工用辅助放线装置 |
| CN112531554B (zh) * | 2020-10-26 | 2022-04-29 | 国网浙江省电力有限公司杭州供电公司 | 一种基于无人机的精确挂设双滑车系统和方法 |
| JP7046405B1 (ja) | 2021-10-13 | 2022-04-04 | 株式会社空撮技研 | 無人飛行体の線状体繰出装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4889533B2 (ja) * | 2007-03-22 | 2012-03-07 | 中国電力株式会社 | 延線ロープの張設方法 |
| JPWO2014203593A1 (ja) * | 2013-06-21 | 2017-02-23 | 株式会社エルム | 遠隔操縦無人飛行体の制御システム |
| JP2017077047A (ja) * | 2015-10-13 | 2017-04-20 | 株式会社空撮技研 | 延線装置 |
-
2016
- 2016-03-17 JP JP2016053889A patent/JP6426643B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11186364B2 (en) | 2018-07-03 | 2021-11-30 | Panasonic Intellectual Property Management Co., Ltd. | Information processing method, control device, and mobile tethering body |
| US11325703B2 (en) | 2018-07-09 | 2022-05-10 | Panasonic Intellectual Property Management Co., Ltd. | Control device, information processing method, and tethering device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017169395A (ja) | 2017-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6426643B2 (ja) | 無人飛行体用の線状体繰出装置 | |
| JP7053450B2 (ja) | 無人飛行体 | |
| WO2020168631A1 (zh) | 一种系留无人机智能收放线装置及其工作方法 | |
| JP6626009B2 (ja) | 飛行ロボット装置 | |
| JP6524116B2 (ja) | 飛行ロボット装置 | |
| KR102666364B1 (ko) | 낚시용 릴 및 이것을 구비한 이력 데이터 관리 시스템 | |
| JP5719978B1 (ja) | ケーブルシステム | |
| JP6261830B2 (ja) | 滞空位置制御装置 | |
| JP2017169395A5 (ja) | ||
| CN103935833A (zh) | 一种光纤复合电缆光单元成缆放线装置及其成缆方法 | |
| JP6085520B2 (ja) | 遠隔操縦式無人飛行体 | |
| JP2017114200A (ja) | 無人航空機の飛行補助装置 | |
| JP2017077047A (ja) | 延線装置 | |
| JP2019149880A (ja) | パイロットロープの延線及び回収装置 | |
| CN105480888B (zh) | 绞车、用于具有可编程控制的绞车的绞车系统和方法 | |
| JP2020083209A (ja) | 無人飛行体 | |
| KR100951510B1 (ko) | 권취 장치 | |
| US11851211B2 (en) | Expendable airborne fiber optic link | |
| JP2019156242A (ja) | 飛行体システム | |
| JP6442784B2 (ja) | ケーブル処理装置及び移動ロボット | |
| EP2813456A1 (en) | Cable braking and backward tension device | |
| JP7084892B2 (ja) | 無人飛行体 | |
| JP7046405B1 (ja) | 無人飛行体の線状体繰出装置 | |
| JP2007331862A (ja) | テンション装置 | |
| JP4150652B2 (ja) | 線状体のスクリーニング方法及びその装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180719 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180719 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180719 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181019 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181025 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6426643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D02 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |