JP6325504B2 - 学習制御器の自動調整を行う機能を有するサーボ制御装置 - Google Patents
学習制御器の自動調整を行う機能を有するサーボ制御装置 Download PDFInfo
- Publication number
- JP6325504B2 JP6325504B2 JP2015211940A JP2015211940A JP6325504B2 JP 6325504 B2 JP6325504 B2 JP 6325504B2 JP 2015211940 A JP2015211940 A JP 2015211940A JP 2015211940 A JP2015211940 A JP 2015211940A JP 6325504 B2 JP6325504 B2 JP 6325504B2
- Authority
- JP
- Japan
- Prior art keywords
- evaluation function
- learning
- characteristic
- unit
- learning controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/042—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators in which a parameter or coefficient is automatically adjusted to optimise the performance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0265—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric the criterion being a learning criterion
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/19—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/402—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by control arrangements for positioning, e.g. centring a tool relative to a hole in the workpiece, additional detection means to correct position
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39352—Feedback error learning, ffw ann compensates torque, feedback from pd to ann
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41144—Element used such as low pass filter to cut resonance at non needed regions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41166—Adaptive filter frequency as function of oscillation, rigidity, inertia load
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/42—Servomotor, servo controller kind till VSS
- G05B2219/42128—Servo characteristics, drive parameters, during test move
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/42—Servomotor, servo controller kind till VSS
- G05B2219/42141—Filter error learning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50281—Adjust tool for tool offset by using an axis parallel to feed axis
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Software Systems (AREA)
- Artificial Intelligence (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Manufacturing & Machinery (AREA)
- Human Computer Interaction (AREA)
- Data Mining & Analysis (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Health & Medical Sciences (AREA)
- Feedback Control In General (AREA)
- Control Of Position Or Direction (AREA)
- Numerical Control (AREA)
Description

評価関数 = ピーク高さ / 半値幅 (3)
図4において、縦方向の矢印がピーク高さを表し、横方向の矢印が半値幅を示す。評価値が算出されたら、評価値(評価関数)が極小となるように逐次計算で調整を行う。
2 位置検出部
3 位置偏差取得部
4 位置制御ループ
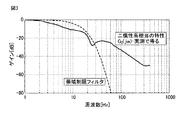
5 帯域制限フィルタ
6 動特性補償要素
7 学習制御器
8 正弦波掃引入力部
9 周波数特性算出部
10 学習制御特性評価関数算出部
Claims (1)
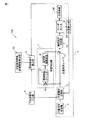
- サーボモータで駆動される送り軸を有する工作機械のサーボ制御装置において、
送り軸を所定の同一動作パターンで駆動するための位置指令を作成する位置指令作成部と、
送り軸の位置を検出する位置検出部と、
前記位置指令作成部が作成した位置指令値及び前記位置検出部が検出した位置検出値を取得し、位置指令値と位置検出値との差分である位置偏差を算出する位置偏差取得部と、
前記位置指令作成部、前記位置検出部、及び前記位置偏差取得部を含む位置制御ループと、
前記位置偏差取得部から出力された位置偏差の高周波成分を減衰させる帯域制限フィルタと、
前記帯域制限フィルタから出力された位置偏差に対して位相進めを実施する動特性補償要素と、
前記帯域制限フィルタ及び前記動特性補償要素を含む学習制御器と、
前記位置制御ループへの正弦波掃引を行う正弦波掃引入力部と、
正弦波を前記位置制御ループへ入力したときの前記位置制御ループの出力から、位置制御ループ入出力信号の利得と位相を推定するための周波数特性算出部と、
前記周波数特性算出部が算出した実測の周波数特性、及び前記学習制御器の周波数特性に基づいて、学習制御器付きの位置制御特性を示す評価関数を計算する学習制御特性評価関数算出部と、を具備し、
前記学習制御特性評価関数算出部は、評価関数の値に基づいて前記学習制御器を構成する前記帯域制限フィルタ及び前記動特性補償フィルタの少なくとも一方の構成を変更し、
前記学習制御特性評価関数算出部は、評価関数の値が極小となるように前記学習制御器を構成する前記帯域制限フィルタ及び前記動特性補償フィルタの少なくとも一方の調整を行い、
前記評価関数は、前記学習制御器における過渡偏差の収束性を表す指標の周波数特性におけるピーク高さ及び半値幅を用いて、以下の式により算出される、
評価関数 = ピーク高さ / 半値幅
ことを特徴とするサーボ制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015211940A JP6325504B2 (ja) | 2015-10-28 | 2015-10-28 | 学習制御器の自動調整を行う機能を有するサーボ制御装置 |
| DE102016012756.2A DE102016012756B4 (de) | 2015-10-28 | 2016-10-25 | Servosteuersystem mit Funktion zum automatischen Einstellen einer Lernsteuereinheit |
| US15/335,452 US10281884B2 (en) | 2015-10-28 | 2016-10-27 | Learning controller for automatically adjusting servo control activity |
| CN201610958018.1A CN106647258B (zh) | 2015-10-28 | 2016-10-27 | 具有进行学习控制器的自动调整的功能的伺服控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015211940A JP6325504B2 (ja) | 2015-10-28 | 2015-10-28 | 学習制御器の自動調整を行う機能を有するサーボ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017084104A JP2017084104A (ja) | 2017-05-18 |
| JP6325504B2 true JP6325504B2 (ja) | 2018-05-16 |
Family
ID=58546100
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015211940A Active JP6325504B2 (ja) | 2015-10-28 | 2015-10-28 | 学習制御器の自動調整を行う機能を有するサーボ制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10281884B2 (ja) |
| JP (1) | JP6325504B2 (ja) |
| CN (1) | CN106647258B (ja) |
| DE (1) | DE102016012756B4 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108959674B (zh) * | 2017-05-27 | 2021-12-07 | 宁波韦尔德斯凯勒智能科技有限公司 | 一种补偿位置域上重复干扰的交互式学习控制器及方法 |
| CN107846171B (zh) * | 2017-09-05 | 2019-10-18 | 北京车和家信息技术有限公司 | 电机的变频控制方法及装置 |
| CN108628166B (zh) * | 2018-05-08 | 2020-12-29 | 苏州科技大学 | 滚珠丝杠进给驱动系统速度环增益与积分时间优化方法 |
| JP7154823B2 (ja) | 2018-05-28 | 2022-10-18 | キヤノン株式会社 | 情報処理装置、ロボット制御装置、情報処理方法及びプログラム |
| DE112018000122T8 (de) | 2018-06-14 | 2020-04-09 | Mitsubishi Electric Corporation | Maschinelles-Lernen-Vorrichtung, Korrekturparameter-Anpassungssystem und Maschinelles-Lernen-Verfahren |
| JP6784722B2 (ja) | 2018-06-28 | 2020-11-11 | ファナック株式会社 | 出力装置、制御装置、及び評価関数値の出力方法 |
| JP6740290B2 (ja) * | 2018-07-17 | 2020-08-12 | ファナック株式会社 | 機械学習装置、制御装置、及び機械学習方法 |
| CN111630459A (zh) * | 2018-08-01 | 2020-09-04 | 深圳配天智能技术研究院有限公司 | 获取伺服系统频率特性的方法、电子装置和存储装置 |
| CN108983615B (zh) * | 2018-08-17 | 2021-03-30 | 台州学院 | 基于反双曲正弦吸引律的离散双周期重复控制器 |
| JP6856591B2 (ja) * | 2018-09-11 | 2021-04-07 | ファナック株式会社 | 制御装置、cnc装置及び制御装置の制御方法 |
| JP6901450B2 (ja) * | 2018-10-02 | 2021-07-14 | ファナック株式会社 | 機械学習装置、制御装置及び機械学習方法 |
| JP6849643B2 (ja) | 2018-11-09 | 2021-03-24 | ファナック株式会社 | 出力装置、制御装置、及び評価関数と機械学習結果の出力方法 |
| JP6956122B2 (ja) * | 2019-01-24 | 2021-10-27 | ファナック株式会社 | フィルタの係数を最適化する機械学習システム、制御装置及び機械学習方法 |
| JP6904994B2 (ja) | 2019-02-26 | 2021-07-21 | ファナック株式会社 | 画面作成装置及び画面作成システム |
| JP7021147B2 (ja) | 2019-04-03 | 2022-02-16 | ファナック株式会社 | モータ制御装置及びモータ制御用コンピュータプログラム |
| JP7000373B2 (ja) * | 2019-04-15 | 2022-01-19 | ファナック株式会社 | 機械学習装置、制御装置及び機械学習方法 |
| US20230176532A1 (en) * | 2020-06-09 | 2023-06-08 | Fanuc Corporation | Control assist device, control device, and control assist method |
| WO2025094330A1 (ja) * | 2023-11-01 | 2025-05-08 | ファナック株式会社 | モータ制御装置およびモータ制御方法 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3682191A (en) * | 1970-08-10 | 1972-08-08 | Johnson Service Co | Apparatus and method for sensing the position of a surface |
| JPS6453210A (en) * | 1987-05-13 | 1989-03-01 | Hitachi Ltd | Method and device for driving servo system |
| JPH0731529B2 (ja) * | 1988-07-29 | 1995-04-10 | オ−クマ株式会社 | 数値制御工作機械における学習制御方式 |
| JP2656637B2 (ja) * | 1989-11-22 | 1997-09-24 | 株式会社日立製作所 | プロセス制御システム及び発電プラントプロセス制御システム |
| JP2750626B2 (ja) * | 1990-03-30 | 1998-05-13 | キヤノン株式会社 | 位置決め装置の粘性摩擦係数同定方法 |
| JPH0535899A (ja) * | 1991-08-01 | 1993-02-12 | Toshiba Corp | ニユ−ラルネツトワ−クの周波数特性学習装置 |
| US5677609A (en) * | 1994-07-28 | 1997-10-14 | National Semiconductor Corporation | Intelligent servomechanism controller |
| US5608843A (en) * | 1994-08-01 | 1997-03-04 | The United States Of America As Represented By The Secretary Of The Air Force | Learning controller with advantage updating algorithm |
| US6097168A (en) * | 1997-08-25 | 2000-08-01 | Toshiba Kikai Kabushiki Kaisha | Position control apparatus and method of the same, numerical control program preparation apparatus and method of the same, and methods of controlling numerical control machine tool |
| ATE300379T1 (de) * | 1998-09-08 | 2005-08-15 | Makino Inc | Werkzeug mit fluidbetätigter achse |
| JP3552988B2 (ja) * | 1999-11-29 | 2004-08-11 | 株式会社安川電機 | サーボ制御方法 |
| KR100425461B1 (ko) * | 2001-08-29 | 2004-03-30 | 삼성전자주식회사 | 디스크 판별 장치 및 방법 |
| JP2004227163A (ja) * | 2003-01-21 | 2004-08-12 | Fanuc Ltd | サーボ制御装置 |
| JP2006197726A (ja) * | 2005-01-13 | 2006-07-27 | Yaskawa Electric Corp | 位置決め制御装置および位置決め制御方法 |
| JP4280241B2 (ja) | 2005-02-02 | 2009-06-17 | ファナック株式会社 | 学習制御機能を有する数値制御装置 |
| JP4361071B2 (ja) * | 2005-07-08 | 2009-11-11 | ファナック株式会社 | サーボ制御装置 |
| JP2008225533A (ja) * | 2007-03-08 | 2008-09-25 | Fanuc Ltd | サーボ制御装置 |
| JP4830993B2 (ja) * | 2007-07-11 | 2011-12-07 | 富士電機株式会社 | 半導体装置の劣化検出方法 |
| WO2009019953A1 (ja) | 2007-08-03 | 2009-02-12 | Kabushiki Kaisha Yaskawa Denki | 電動機制御装置およびそのゲイン調整方法 |
| JP5235707B2 (ja) * | 2009-02-03 | 2013-07-10 | キヤノン株式会社 | 制御装置 |
| JP4575508B1 (ja) * | 2009-05-20 | 2010-11-04 | ファナック株式会社 | デュアル位置フィードバック制御を行うサーボ制御装置 |
| JP4980453B2 (ja) | 2010-09-06 | 2012-07-18 | ファナック株式会社 | 加工を高精度化するサーボ制御システム |
| JP5449569B2 (ja) * | 2010-11-15 | 2014-03-19 | 三菱電機株式会社 | モータ制御装置 |
| JP5302437B1 (ja) | 2012-03-29 | 2013-10-02 | ファナック株式会社 | 圧力制御パラメータを調整する機能を有する射出成形機の制御装置 |
| JP5800750B2 (ja) * | 2012-04-11 | 2015-10-28 | ファナック株式会社 | 射出成形機の可動部の劣化検出方法および可動部の劣化検出機能を有する射出成形機の制御装置 |
| JP5916583B2 (ja) * | 2012-10-19 | 2016-05-11 | 株式会社神戸製鋼所 | 多関節ロボットのウィービング制御装置 |
| US9248569B2 (en) * | 2013-11-22 | 2016-02-02 | Brain Corporation | Discrepancy detection apparatus and methods for machine learning |
| US20150283703A1 (en) * | 2014-04-03 | 2015-10-08 | Brain Corporation | Apparatus and methods for remotely controlling robotic devices |
| US9630318B2 (en) * | 2014-10-02 | 2017-04-25 | Brain Corporation | Feature detection apparatus and methods for training of robotic navigation |
| JP6077617B1 (ja) * | 2015-09-25 | 2017-02-08 | ファナック株式会社 | 最適な速度分布を生成する工作機械 |
| JP6219897B2 (ja) * | 2015-09-28 | 2017-10-25 | ファナック株式会社 | 最適な加減速を生成する工作機械 |
| JP6457563B2 (ja) * | 2017-01-24 | 2019-01-23 | ファナック株式会社 | 数値制御装置及び機械学習装置 |
-
2015
- 2015-10-28 JP JP2015211940A patent/JP6325504B2/ja active Active
-
2016
- 2016-10-25 DE DE102016012756.2A patent/DE102016012756B4/de active Active
- 2016-10-27 CN CN201610958018.1A patent/CN106647258B/zh active Active
- 2016-10-27 US US15/335,452 patent/US10281884B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN106647258B (zh) | 2019-06-07 |
| DE102016012756A1 (de) | 2017-05-04 |
| DE102016012756B4 (de) | 2019-06-19 |
| JP2017084104A (ja) | 2017-05-18 |
| US20170123385A1 (en) | 2017-05-04 |
| CN106647258A (zh) | 2017-05-10 |
| US10281884B2 (en) | 2019-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6325504B2 (ja) | 学習制御器の自動調整を行う機能を有するサーボ制御装置 | |
| JP5273575B2 (ja) | 電動機制御装置 | |
| JP2017068625A (ja) | 学習制御器の特性測定を行う機能を有するサーボ制御装置 | |
| JP6316323B2 (ja) | モータ制御装置 | |
| US10108177B2 (en) | Control parameter adjustment device | |
| JP5269158B2 (ja) | 制御方法及び制御装置 | |
| WO2012057235A1 (ja) | 数値制御方法 | |
| JP5366840B2 (ja) | 軌跡制御装置 | |
| KR102183548B1 (ko) | 모터 구동 장치 | |
| JP6958574B2 (ja) | モデル予測制御のための制御パラメータの設定方法 | |
| JP5652678B2 (ja) | 電動機制御装置 | |
| JP4973665B2 (ja) | 電動機制御装置と出力フィルタ調整方法および出力フィルタ調整装置 | |
| EP2996003B1 (en) | Device and method for moving an object | |
| US12222699B2 (en) | Motor control device and motor control computer program | |
| JP6412071B2 (ja) | モータ制御装置、モータ制御方法及びモータ制御用プログラム | |
| JP5441944B2 (ja) | モータ制御装置 | |
| CN106233213A (zh) | 指令值生成装置 | |
| JP6111642B2 (ja) | 制御装置、制御プログラムおよび制御方法 | |
| WO2014064815A1 (ja) | サーボ制御装置 | |
| JP2005071034A (ja) | サーボ制御装置 | |
| JP5460371B2 (ja) | 数値制御装置 | |
| JP7040434B2 (ja) | 制御装置 | |
| CN120811200B (zh) | 用于高动态伺服系统的半隐式高阶滑模控制方法、介质及系统 | |
| EP3598248A1 (en) | Control system | |
| TWI584094B (zh) | 用於線性移動平台的控制設備及線性移動系統 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170920 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20171027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180320 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180412 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6325504 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |