以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。以下では、複数の実施の形態について説明するが、各実施の形態で説明された構成を適宜組み合わせることは出願当初から予定されている。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
[実施の形態1]
(回路構成)
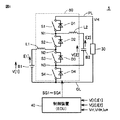
図1は、本発明の実施の形態1に従う電源システムの構成例を示す回路図である。本実施の形態1に従う電源システム5は、特許文献1に示された電源システムと回路構成が共通する。
図1を参照して、電源システム5は、直流電源B1と、直流電源B2と、負荷30と、制御装置40と、電力変換器50とを備える。
本実施の形態1において、直流電源B1およびB2は、二次電池や電気二重層キャパシタ等の蓄電装置によって構成される。たとえば、直流電源B1は、リチウムイオン二次電池やニッケル水素電池のような二次電池で構成される。また、直流電源B2は、たとえば、電気二重層キャパシタやリチウムイオンキャパシタ等の出力特性に優れた直流電圧源要素により構成される。直流電源B1および直流電源B2は、「第1の直流電源」および「第2の直流電源」にそれぞれ対応する。
なお、直流電源B1およびB2を同種の蓄電装置によって構成することも可能である。また、直流電源B1およびB2の容量についても特に限定されることはなく、直流電源B1およびB2は、各々を同等の容量で構成してもよく、一方の直流電源の容量を他方の直流電源の容量より大きくしてもよい。
電力変換器50は、高電圧側の電力線PLおよび低電圧側の電力線GLの間の直流電圧VH(以下、出力電圧VHとも称する)を制御するように構成される。電力線GLは、代表的には接地配線で構成される。
負荷30は、電力変換器50の出力電圧VHを受けて動作する。出力電圧VHの電圧指令値VH*は、負荷30の動作に適した電圧に設定される。電圧指令値VH*は、負荷30の状態に応じて可変に設定されてもよい。さらに、負荷30は、回生発電等によって、直流電源B1および/またはB2の充電電力を発生可能に構成されてもよい。
電力変換器50は、電力用半導体スイッチング素子S1〜S4と、リアクトルL1,L2とを含む。本実施の形態1において、電力用半導体スイッチング素子(以下、単に「スイッチング素子」とも称する)としては、IGBT(Insulated Gate Bipolar Transistor)、電力用MOS(Metal Oxide Semiconductor)トランジスタあるいは電力用バイポーラトランジスタ等を用いることができる。スイッチング素子S1〜S4に対しては、逆並列ダイオードD1〜D4が配置されている。スイッチング素子S1〜S4は、制御装置40からの制御信号SG1〜SG4に応答して、オンオフを制御することが可能である。
スイッチング素子S1は、電力線PLおよびノードN1の間に電気的に接続される。リアクトルL2および直流電源B2は、ノードN1とノードN3との間に直列に、電気的に接続される。たとえば、リアクトルL2は、ノードN1と直流電源B2の正極端子との間に電気的に接続されるとともに、直流電源B2の負極端子は、ノードN3と電気的に接続される。なお、リアクトルL2および直流電源B2の接続順序を入れ換えても、電気的に等価な回路構成が形成される。
スイッチング素子S2は、ノードN1およびN2の間に電気的に接続される。リアクトルL1および直流電源B1は、ノードN2および電力線GLの間に直列に、電気的に接続される。たとえば、リアクトルL1は、直流電源B1の正極端子およびノードN1の間に電気的に接続されるとともに、直流電源B1の負極端子は、電力線GLと電気的に接続される。なお、リアクトルL1および直流電源B1の接続順序を入れ換えても、電気的に等価な回路構成が形成される。
スイッチング素子S3は、ノードN2およびN3の間に電気的に接続される。スイッチング素子S4は、ノードN3および電力線GLの間に電気的に接続される。電力線GLは、負荷30および、直流電源B1の負極端子と電気的に接続される。
図1の構成例では、スイッチング素子S1は「第1のスイッチング素子」に対応し、スイッチング素子S2は「第2のスイッチング素子」に対応し、スイッチング素子S3は「第3のスイッチング素子」に対応し、スイッチング素子S4は「第4のスイッチング素子」に対応する。さらに、リアクトルL1およびL2は、「第1のリアクトル」および「第2のリアクトル」にそれぞれ対応する。
制御装置40は、たとえば、図示しないCPU(Central Processing Unit)およびメモリを有する電子制御ユニット(ECU)によって構成される。制御装置40は、メモリに記憶されたマップおよびプログラムに基づいて、各センサによる検出値を用いた演算処理を行なうように構成される。あるいは、制御装置40の少なくとも一部は、電子回路等のハードウェアにより所定の数値・論理演算処理を実行するように構成されてもよい。
制御装置40は、出力電圧VHを制御するために、スイッチング素子S1〜S4のオンオフを制御する制御信号SG1〜SG4を生成する。
なお、図1では図示を省略しているが、直流電源B1の電圧(V[1]と表記する)および電流(I[1]と表記する)、直流電源B2の電圧(V[2]と表記する)および電流(I[2]と表記する)、ならびに、出力電圧VHの検出器(電圧センサ,電流センサ)が設けられている。これらの検出器の出力は、制御装置40へ与えられる。
実施の形態1に従う電力変換器50は、スイッチング素子S1〜S4の制御によって、直流電源B1,B2が並列に負荷30との間で電力の授受を行なう「パラレル接続モード」と、直列に接続された直流電源B1,B2が負荷30との間で電力の授受を実行する「シリーズ接続モード」とを切替えて動作することが可能である。実施の形態1では、パラレル接続モードにおける制御動作、特に、スイッチング素子による電力損失低減のための制御について説明する。
(パラレル接続モードでの回路動作)
電力変換器50のパラレル接続モードでの制御動作について説明する。
図1を参照して、電力変換器50は、直流電源B1および直流電源B2の各々に対応して昇圧チョッパ回路を備えた構成となっている。すなわち、直流電源B1に対しては、スイッチング素子S1,S2を上アームとする一方で、スイッチング素子S3,S4を下アームとする電流双方向の第1の昇圧チョッパ回路が構成される。
具体的には、第1の昇圧チョッパ回路の下アーム(スイッチング素子S3,S4)は、直流電源B1が力行状態のときにリアクトルL1にエネルギを蓄積するための「第1の電流経路」を形成する一方、直流電源B1が回生状態のときにリアクトルL1の蓄積エネルギを直流電源B1に出力するための「第2の電流経路」を形成する。第1の昇圧チョッパ回路の上アーム(スイッチング素子S1,S2)は、直流電源B1が力行状態のときにリアクトルL1の蓄積エネルギを直流電源B1のエネルギとともに電力線PLに出力するための「第2の電流経路」を形成する一方で、直流電源B1が回生状態のときに電力線PLからの出力をリアクトルL1にエネルギを蓄積するための「第1の電流経路」を形成する。
スイッチング素子S3,S4のペアがオンされる一方で、スイッチング素子S1,S2の少なくとも一方がオフされている第1の期間と、スイッチング素子S1,S2のペアがオンされる一方で、スイッチング素子S3,S4の少なくとも一方がオフされている第2の期間とを交互に繰り返すことにより、第1の電流経路および第2の電流経路が交互に形成される。
このようなパラレル接続モードにおける直流電源B1に対する直流電力変換において、電圧変換比(昇圧比)は、直流電源B1の電圧V[1]、電力線PLの出力電圧VHおよび直流電源B1の出力デューティ比Da(以下、単にデューティ比Daとも称する)を用いて、下記(1)式で示される。なお、デューティ比は、下アームのオン期間およびオフ期間の和であるスイッチング周期に対する、下アームのオン期間比で定義される。(1)式では、スイッチング素子S3,S4のペアがオンされる第1の期間のデューティ比をDaとする。
VH=1/(1−Da)・V[1] …(1)
同様に、直流電源B2に対しては、スイッチング素子S1,S4を上アームとする一方で、スイッチング素子S2,S3を下アームとする電流双方向の第2の昇圧チョッパ回路が構成される。第2の昇圧チョッパ回路の下アーム(スイッチング素子S2,S3)は、直流電源B2が力行状態のときにリアクトルL2にエネルギを蓄積するための「第3の電流経路」を形成する一方で、直流電源B2が回生状態のときにリアクトルL2の蓄積エネルギを直流電源B2に出力するための「第4の電流経路」を形成する。第2の昇圧チョッパ回路の上アーム(スイッチング素子S1,S4)は、直流電源B2が力行状態のときにリアクトルL2の蓄積エネルギを直流電源B2のエネルギとともに電力線PLに出力するための「第4の電流経路」を形成する一方で、直流電源B2が回生状態のときに電力線PLからの出力をリアクトルL2にエネルギを蓄積するための「第3の電流経路」を形成する。
スイッチング素子S2,S3のペアがオンされる一方で、スイッチング素子S1,S4の少なくとも一方がオフされている第1の期間と、スイッチング素子S1,S4のペアがオンされる一方で、スイッチング素子S2,S3の少なくとも一方がオフされている第2の期間とを交互に繰り返すことにより、第3の電流経路および第4の電流経路が交互に形成される。
このようなパラレル接続モードにおける直流電源B2に対する直流電力変換において、電圧変換比(昇圧比)は、直流電源B2の電圧V[2]、電力線PLの出力電圧VHおよび直流電源B2からの出力デューティ比Db(以下、単にデューティ比Dbとも称する)を用いて、下記(2)式で示される。(2)式では、スイッチング素子S2,S3のペアがオンされる第1の期間のデューティ比をDbとする。
VH=1/(1−Db)・V[2] …(2)
なお、図1から理解されるように、スイッチング素子S1〜S4の各々は、第1の昇圧チョッパ回路によって直流電源B1および電力線PLの間に形成される第1および第2の電流経路のいずれか一方と、第2の昇圧チョッパ回路によって直流電源B2および電力線PLの間に形成される第3および第4の電流経路のいずれか一方との両方に含まれるように配置されている。
(パラレル接続モードでの制御動作)
電力変換器50でのパラレル接続モードにおける制御動作について説明する。以下に説明する制御動作は、制御装置40によるハードウェア処理および/またはソフトウェア処理によって実現される。
電力変換器50をパラレル接続モードで動作させる場合には、直流電源B1および直流電源B2のそれぞれについてパルス幅変調(PWM)制御が並列に実行される。パラレル接続モードでは、特許文献1に記載のパラレル接続モードと同様に、直流電源B1およびB2の一方の出力を、出力電圧VHの電圧偏差ΔV(ΔV=VH*−VH)を補償するように制御(電圧制御)するとともに、直流電源B1およびB2の他方の出力を、電流I[1]またはI[2]の電流偏差を補償するように制御(電流制御)することができる。たとえば、電流制御の指令値(Io*)は、当該電源の出力電力を制御するように設定することができる。
一例として、直流電源B1のデューティ比Daは、直流電源B1が電圧源として動作するための電圧フィードバック制御または電流源として動作するための電流フィードバック制御によって算出される。直流電源B2のデューティ比Dbは、直流電源B1が電圧源として動作するときには、直流電源B2が電流源として動作するための電流フィードバック制御によって算出される。反対に、デューティ比Dbは、直流電源B1が電流源として動作するときには、直流電源B2が電圧源として動作するための電圧フィードバック制御によって算出される。
(パラレル接続モードでのスイッチング損失低減のための制御動作)
電力変換器50のパラレル接続モードにおける基本的な制御動作は、特許文献1のパラレル接続モードでの制御動作と同等であるため、これに対する詳細な説明は省略する。ここでは、直流電源B1および直流電源B2のPWM制御に使用されるキャリア波の位相制御(以下、「キャリア位相制御」とも称する)について説明する。
(1)キャリア位相制御
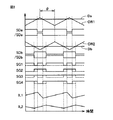
図2は、位相が異なるキャリア波を用いた場合におけるパラレル制御モードの制御動作例が示す波形図である。
図2を参照して、直流電源B1のPWM制御に用いられるキャリア波CW1と、直流電源B2のPWM制御に用いられるキャリア波CW2とは、同一周波数であるが位相が異なる。図2の例では、キャリア波CW1およびCW2間の位相差φ=180度である。キャリア波CW1,CW2には、三角波が用いられる。キャリア波CW1,CW2の周期は、各スイッチング素子のスイッチング周波数に相当する。キャリア波CW1の振幅はデューティ比Da=1.0に対応する電圧に設定される。キャリア波CW2の振幅はデューティ比Db=1.0に対応する電圧に設定される。
直流電源B1の出力を制御(電圧または電流制御)するためのデューティ比Daと、キャリア波CW1との電圧比較に基づいて、制御パルス信号SDaが生成される。制御パルス信号SDaは、デューティ比Daを示す電圧が、キャリア波CW1の電圧よりも高いときに論理ハイレベル(以下、Hレベル)に設定される一方で、キャリア波CW1の電圧よりも低いときに論理ローレベル(以下、Lレベル)に設定される。制御パルス信号SDaの周期(Hレベル期間+Lレベル期間)に対するHレベル期間の比、すなわち、制御パルス信号SDaのデューティ比は、Daと同等である。
制御パルス信号/SDaは、制御パルス信号SDaの反転信号である。デューティ比Daが高くなると、制御パルス信号SDaのHレベル期間が長くなる。反対に、デューティ比Daが低くなると、制御パルス信号SDaのLレベル期間が長くなる。
制御パルス信号SDaは、上述した第1の昇圧チョッパ回路の下アーム(スイッチング素子S3,S4)のオンオフを制御する信号に対応する。一方、制御パルス信号/SDaは、第1の昇圧チョッパ回路の上アーム(スイッチング素子S1,S2)のオンオフを制御する信号に対応する。
同様に、直流電源B2の出力を制御(電流または電圧制御)するためのデューティ比Dbと、キャリア波CW2との電圧比較に基づいて、制御パルス信号SDbおよび、その反転信号/SDbが生成される。制御パルス信号SDbのデューティ比はDbと同様であり、制御パルス信号/SDbのデューティ比は(1.0−Db)と同等である。すなわち、デューティ比Dbが高くなると、制御パルス信号SDbのHレベル期間が長くなる。反対に、デューティ比Dbが低くなると、制御パルス信号SDbのLレベル期間が長くなる。
制御パルス信号SDbは、上述した第2の昇圧チョッパ回路の下アーム(スイッチング素子S2,S3)のオンオフを制御する信号に対応する。一方、制御パルス信号/SDbは、第2の昇圧チョッパ回路の上アーム(スイッチング素子S1,S4)のオンオフを制御する信号に対応する。
制御信号SG1〜SG4は、制御パルス信号SDa(/SDa)およびSDb(/SDb)の論理演算に基づいて設定される。制御信号SG1〜SG4に基づいてスイッチング素子S1〜S4をオンオフすることにより、リアクトルL1を流れるリアクトル電流IL1の増減、およびリアクトルL2を流れるリアクトル電流IL2の増減が図2に示すように制御される。リアクトル電流IL1は直流電源B1の電流I[1]に相当し、リアクトル電流IL2は直流電源B2の電流I[2]に相当する。
図2に示されるように、キャリア波CW1とキャリア波CW2との間に位相差φを設けることにより、制御パルス信号SDaは、位相差φ=0のときの制御パルス信号SDaと比較して、Hレベル期間の長さは同じであるものの位相が異なる。同様に、制御パルス信号SDbは、位相差φ=0のときの制御パルス信号SDbと比較して、Hレベル期間の長さが同じであるものの位相が異なる。その結果、制御信号SG1〜SG4は、位相差φ=0のときの制御信号SG1〜SG4とは異なった波形となる。よって、キャリア波CW1およびCW2の間の位相差φを変化させることにより、リアクトル電流IL1およびリアクトル電流IL2の位相関係(電流位相)も変化することが理解される。
一方で、同一のデューティ比Da,Dbに対して、リアクトル電流IL1,IL2の平均値は、位相差φを変化させても変化しないことが理解される。すなわち、直流電源B1,B2の出力は、デューティ比Da,Dbによって制御されるものであり、キャリア波CW1,CW2間の位相差φを変化させても影響が生じない。
したがって、キャリア波CW1,CW2間の位相差φを適切に調整するキャリア位相制御によって、電力変換器50のパラレル接続モードにおける、スイッチング素子S1〜S4の電力損失を低減することができる。
以下では、代表的な例として、直流電源B1およびB2の両方が力行状態、すなわちリアクトル電流IL1>0かつリアクトル電流IL2>0である状態での制御について説明する。
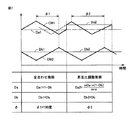
図3は、パラレル接続モードにおけるキャリア位相制御の動作例を説明するための波形図である。
図3を参照して、時刻Taまでは、スイッチング素子S2〜S4がオンされるので、直流電源B1,B2の両方に対して、昇圧チョッパ回路の下アーム(第1および第3の電流経路)がオンされた状態となる。このため、リアクトル電流IL1およびIL2の両方は上昇する。
時刻Taにおいて、スイッチング素子S2がターンオフされることにより、直流電源B2に対して昇圧チョッパ回路の下アーム(第3の電流経路)がオフされた状態となるので、リアクトル電流IL2が上昇から下降に転じる。すなわち、リアクトル電流IL2は極大となる。スイッチング素子S2のターンオフと入替わりに、スイッチング素子S1がターンオンされる。
時刻Ta以降では、直流電源B1に対して昇圧チョッパ回路の下アーム(第1の電流経路)がオンされ、直流電源B2に対して昇圧チョッパ回路の下アームがオフされた状態となる。すなわち、リアクトル電流IL2が上昇する一方で、リアクトル電流IL1が下降する。このとき、電力変換器50での電流経路は、図4(a)のようになる。
図4(a)から理解されるように、時刻Ta以降では、スイッチング素子S4には、リアクトル電流IL1およびIL2の差電流が通過することになる。すなわち、スイッチング素子S4の通過電流が小さくなる。
再び図3を参照して、時刻Tb以降の状態から、スイッチング素子S4がターンオフすると、直流電源B1に対して昇圧チョッパ回路の下アームがオフされた状態となるので、リアクトル電流IL1が上昇から下降に転じる。すなわち、リアクトル電流IL1は極大となる。また、スイッチング素子S2がターンオンすると、直流電源B2に対して昇圧チョッパ回路の下アームがオンされた状態となるので、リアクトル電流IL2が再び下降から上昇に転じる。すなわち、リアクトル電流IL2は極小となる。これにより、電力変換器50での電流経路が、図4(a)の状態から、図4(b)の状態に変化する。図4(b)の状態では、スイッチング素子S2には、リアクトル電流IL1およびIL2の差電流が通過することになるため、スイッチング素子S2の通過電流が小さくなる。
図4(a)の状態でスイッチング素子S4をターンオフさせることにより、スイッチング素子S4のターンオフ時の電流が低減してソフトスイッチングとなり、スイッチング損失を低減できる。また、図4(b)の状態でスイッチング素子S2をターンオンさせることにより、スイッチング素子S2のターンオン時の電流が低減してソフトスイッチングとなり、スイッチング損失を低減できる。
したがって、図3に示されるように、リアクトル電流IL1が上昇から下降に転じるタイミングと、リアクトル電流IL2が下降から上昇に転じるタイミングとが重なるように、電流位相、すなわち、キャリア波CW1,CW2の位相差φを調整する。すなわち、リアクトル電流IL1の変曲点(極大点)と、リアクトル電流IL2の変曲点(極小点)とが同一タイミングとなるように位相差φを調整する。これにより、図3の時刻Tbにおいて、スイッチング素子S2がターンオンされるとともに、スイッチング素子S4がターンオフされる。
再び図3を参照して、時刻Tcでは、スイッチング素子S1がターンオフされるとともに、スイッチング素子S4がターンオンされる。これにより、直流電源B1に対して昇圧チョッパ回路の下アームがオフされた状態となるので、リアクトル電流IL1が下降から上昇に転じる。すなわち、リアクトル電流IL2は極小となる。スイッチング素子S2のターンオフと入替わりに、スイッチング素子S1がターンオンされることにより、直流電源B1,B2の各々に対して昇圧チョッパ回路の下アームがオンされた状態となる。したがって、上述した時刻Ta以前の状態が再現されて、リアクトル電流IL1およびIL2の両方が上昇する。
このように、直流電源B1およびB2の両方が力行状態であるときには、リアクトル電流IL1の極大点と、リアクトル電流IL2の極小点とが図中の時刻Tbで重なるような電流位相となるように、キャリア波CW1,CW2間の位相差φを調整する。これにより、時刻Tbにおけるスイッチング素子S2のターンオン損失およびスイッチング素子S4のターンオフ損失を低減できる。
しかしながら、図3から理解されるように、位相差φを調整することでリアクトル電流IL1の変曲点(極大点または極小点)とリアクトル電流IL2の変曲点(極大点または極小点)とが一致するタイミングは、キャリア波CW1,CW2の1周期(以下、1キャリア周期とも称する)において1回のみである。言い換えれば、キャリア位相制御によってスイッチング損失を低減することができるタイミングは、1キャリア周期において1回のみである。
そのため、リアクトル電流IL2が極大となるタイミングである時刻Taでは、スイッチング素子S2のターンオフ時の電流が大きくハードスイッチングとなるため、スイッチング素子S2のターンオフ損失が増加することが懸念される。同様に、リアクトル電流IL1が極小となるタイミングである時刻Tcでは、スイッチング素子S4のターンオン時の電流が大きくハードスイッチングとなるため、スイッチング素子S4のターンオン損失が増加することが懸念される。
これに対して、実施の形態1に従う電力変換器50のパラレル接続モードでは、以下に説明するように、キャリア位相制御に並行して、直流電源B1のデューティ比Daおよび直流電源B2のデューティ比Dbを適切に調整する制御(以下、「デューティ比制御」とも称する)を行なうことにより、スイッチング素子S1〜S4のスイッチング損失のさらなる低減を図る。
(2)デューティ比制御
図5は、実施の形態1に従う電力変換器50に対するデューティ比制御の適用を説明するための波形図である。
図5を参照して、デューティ比制御の適用時には、デューティ比Da,Dbを調整することにより、制御パルス信号SDaのHレベル期間(=制御パルス信号/SDaのLレベル期間)および制御パルス信号SDbのHレベル期間(=制御パルス信号/SDbのLレベル期間)を調整する。
上述のように、キャリア位相制御は、キャリア波CW1,CW2間の位相差φを変化させることによって、リアクトル電流IL1およびリアクトル電流IL2の位相関係(電流位相)を変化させるものである。これに対して、デューティ比制御は、デューティ比Da,Dbを変化させることによって、リアクトル電流IL1,IL2の波形を変化させるものである。実施の形態1では、キャリア位相制御とデューティ比制御とを組み合わせることで、1キャリア周期におけるリアクトル電流IL1の変曲点とリアクトル電流IL2の変曲点とが一致するタイミングを増やすことができる。
その一方で、デューティ比Da,Dbを変化させると、直流電源B1,B2の出力も変化する。その結果、直流電源B1およびB2間の電力配分が変化してしまい、出力電圧VHを電圧指令値VH*に制御することが困難となる。
したがって、実施の形態1に従う電力変換器50では、複数のキャリア周期を「1調整期間」として、当該1調整期間を通算したデューティ比Daの平均値が、直流電源B1の出力を制御(電圧/電流制御)するためのデューティ比に相当するとともに、1調整期間を通算したデューティ比Dbの平均値が、直流電源B2の出力を制御(電流/電圧制御)するためのデューティ比に相当するように、各キャリア周期におけるデューティ比Da,Dbを調整する。すなわち、1調整期間単位で、直流電源B1,B2の出力制御のためのデューティ比を保障する。これにより、各キャリア周期におけるデューティ比Da,Dbを変化させても直流電源B1およびB2間の電力配分に影響を生じさせないようにする。
具体的には、m個(mは2以上の整数)のキャリア周期を1調整期間とし、当該1調整期間を、n個(nは1以上m未満の整数)の「第1のキャリア周期」と、(m−n)個の「第2のキャリア周期」とから構成する。図5では、説明の簡素化のため、m=2とし、かつ、n=1としたときの電力変換器50の動作例を示している。すなわち、図5は、第1のキャリア周期と第2のキャリア周期とが交互に形成される例を示している。
第1のキャリア周期では、リアクトル電流IL1の2つの変曲点(極大点および極小点)と、リアクトル電流IL2の2つの変曲点とがそれぞれ同一タイミングとなるように、デューティ比Da,Dbを調整するとともに、位相差φを調整する。図5では、第1のキャリア周期における直流電源B1のデューティ比をDa1とし、直流電源B2のデューティ比をDb1とする。また、第1のキャリア周期における位相差をφ1とする。
一方、第2のキャリア周期では、第1のキャリア周期におけるデューティ比Da1,Db2に基づいて、デューティ比Da,Dbを調整する。具体的には、1調整期間を通算したデューティ比Da,Dbの平均値がそれぞれ、直流電源B1,B2の出力制御によって算出されるデューティ比に相当するように、第1のキャリア周期におけるデューティ比Da1,Db2に基づいて、デューティ比Da,Dbを調整する。図5では、第2のキャリア周期における直流電源B1のデューティ比をDa2とし、直流電源B2のデューティ比をDb2とする。さらに、リアクトル電流IL1の2つの変曲点の一方(極大点)と、リアクトル電流IL2の2つの変曲点の一方(極小点)とが同一タイミングとなるように、調整されたデューティ比Da2,Db2に応じて位相差φを調整する。第2のキャリア周期における位相差をφ2とする。
すなわち、第1のキャリア周期は、リアクトル電流IL1,IL2の2つの変曲点のタイミングを一致させることに特化した制御が行なわれる周期(以下、「全合わせ周期」とも称する)に相当する。これに対して、第2のキャリア周期は、1調整期間単位で直流電源B1,B2の出力制御のためのデューティ比を保障するための制御が行なわれる周期(以下、「昇圧比調整周期」とも称する)に相当する。なお、昇圧比調整周期においても、リアクトル電流IL1,IL2の変曲点を同一タイミングとするための位相差φの調整が行なわれる。
次に、第1のキャリア周期および第2のキャリア周期における電力変換器50の動作および制御について詳細に説明する。以下では、代表的な例として、直流電源B1およびB2の両方が力行状態、すなわちリアクトル電流IL1>0かつリアクトル電流IL2>0である状態での制御について説明する。
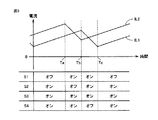
図6は、電力変換器50においてパラレル接続モードにおけるスイッチング損失を低減するための、実施の形態1によるデューティ比制御およびキャリア位相制御による電流位相を説明する波形図である。
(2−1)第1のキャリア周期における制御動作
図6を参照して、時刻Taまでは、スイッチング素子S1,S2がオンされるので、直流電源B1に対して昇圧チョッパ回路の上アーム(第2の電流経路)がオンされた状態となる。このため、リアクトル電流IL1は下降する。また、スイッチング素子S2,S3がオンされるので、直流電源B2に対しては昇圧チョッパ回路の下アーム(第3の電流経路)がオンされた状態となる。このため、リアクトル電流IL2は上昇する。すなわち、リアクトル電流IL1が下降する一方で、リアクトル電流IL2が上昇する。このとき、電力変換器50での電流経路は、図4(b)のようになる。図4(b)の状態では、スイッチング素子S2には、リアクトル電流IL1およびIL2の差電流が通過することになるため、スイッチング素子S2の通過電流が小さくなる。
時刻Taにおいて、スイッチング素子S4がターンオンされることにより、直流電源B1に対して昇圧チョッパ回路の下アーム(第1の電流経路)がオンされた状態となるので、リアクトル電流IL1が上昇を開始する。また、スイッチング素子S2がターンオフすると、直流電源B2に対して昇圧チョッパ回路の上アーム(第4の電流経路)がオフされた状態となるので、リアクトル電流IL2が下降を開始する。すなわち、電力変換器50での電流経路が、図4(b)の状態から、図4(a)の状態に変化する。図4(a)の状態では、スイッチング素子S4には、リアクトル電流IL1およびIL2の差電流が通過することになるため、スイッチング素子S4の通過電流が小さくなる。
図4(b)の状態でスイッチング素子S2をターンオフさせることにより、スイッチング素子S2のターンオフ時の電流、すなわち、ターンオフ損失を低減できる。また、図4(a)の状態でスイッチング素子S4をターンオンさせることにより、スイッチング素子S4のターンオン時の電流、すなわち、ターンオン損失を低減できる。
したがって、図6に示されるように、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の下降タイミングとが重なるように、デューティ比Da1,Db1を調整するとともに位相差φ1を調整する。これにより、時刻Taにおいて、スイッチング素子S2がターンオフされるとともに、スイッチング素子S4がターンオンされる。なお、リアクトル電流IL1の上昇タイミングは、第2の電流経路から第1の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の下降タイミングは、第3の電流経路から第4の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。
さらに、実施の形態1では、図3の時刻Tbと同様に、時刻Tbにおいて、スイッチング素子S2がターンオンされるとともに、スイッチング素子S4がターンオフされる。これにより、リアクトル電流IL1が再び下降を開始するとともに、リアクトル電流IL2が再び上昇を開始する。すなわち、電力変換器50での電流経路が、図4(a)の状態から、図4(b)の状態に変化する。リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の上昇タイミングとが時刻Tbで一致することによって、時刻Tbにおけるスイッチング素子S2のターンオン損失およびスイッチング素子S4のターンオフ損失を低減できる。なお、リアクトル電流IL1の下降タイミングは、第1の電流経路から第2の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の上昇タイミングは、第4の電流経路から第3の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。
このように、第1のキャリア周期では、デューティ比Da1,Db1を調整するとともに、キャリア波CW1,CW2間の位相差φを調整することにより、直流電源B1およびB2の両方が力行となる状態では、リアクトル電流IL1の上昇タイミングとリアクトル電流IL2の下降タイミングとが重なるとともに、リアクトル電流IL1の下降タイミングとリアクトル電流IL2の上昇タイミングとが重なる。すなわち、スイッチング素子S2のターンオフタイミングと、スイッチング素子S4のターンオンタイミングとが一致するとともに、スイッチング素子S2のターンオンタイミングと、スイッチング素子S4のターンオフタイミングとが一致する。このように、第1のキャリア周期では、リアクトル電流IL1の2つの変曲点と、リアクトル電流IL2の2つの変曲点とがそれぞれ同一タイミングとなることによって、図3に示したキャリア位相制御と比較して、スイッチング素子S1〜S4でのスイッチング損失がさらに低減されることが理解される。
(2−2)第2のキャリア周期における制御動作
時刻Tb〜Teまでの第2のキャリア周期では、第1のキャリア周期および第2のキャリア周期(1調整期間)を通算したデューティ比Daの平均値が、直流電源B1の出力を制御(電圧/電流制御)するためのデューティ比Daに相当するように、デューティ比Da2を調整する。同様に、第1のキャリア周期および第2のキャリア周期(1調整期間)を通算したデューティ比Dbの平均値が、直流電源B2の出力を制御(電流/電圧制御)するためのデューティ比Dbに相当するように、デューティ比Db2を調整する。
時刻Tcでは、スイッチング素子S1がターンオフされるとともに、スイッチング素子S4がターンオンされる。これにより、直流電源B1,B2の各々に対して昇圧チョッパ回路の下アームがオンされた状態となる。これにより、リアクトル電流IL1およびIL2の両方が上昇する。
時刻Tdにおいて、スイッチング素子S1がターンオンされるとともに、スイッチング素子S2がターンオフされることにより、直流電源B2に対して昇圧チョッパ回路の上アームがオンされた状態となるため、リアクトル電流IL2が下降を開始する。これにより、時刻Ta以降の状態が再現される。第2のキャリア周期では、上述した時刻Tbと同様に、リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の上昇タイミングとが重なるように、位相差φ2を調整する。これにより、時刻Teにおいて、スイッチング素子S2がターンオンされるとともに、スイッチング素子S4がターンオフされる。したがって、第2のキャリア周期では、時刻Teにおけるスイッチング素子S2のターンオン損失およびスイッチング素子S4のターンオフ損失を低減できる。
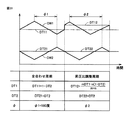
図7は、実施の形態1に従うデューティ比制御を説明するための図表である。図7には、デューティ比Db1およびDb2を、直流電源B2の出力制御のためのデューティ比Dbに設定する場合(Db1=Db2=Db)におけるデューティ比Da1,Da2の設定が示される。
図7を参照して、第1のキャリア周期(全合わせ周期)では、デューティ比Da1およびデューティ比Db1の和が1となるように(Da1+Db1=1)、デューティ比Da1を調整する。デューティ比Da1は、下記(3)式に示すように、デューティ比Db1(=Db)に応じて設定される。
Da1=1−Db1=1−Db ・・・(3)
第2のキャリア周期(昇圧比調整周期)では、デューティ比Da2は、1調整期間(m個のキャリア周期)を通算したデューティ比Daの平均値が、直流電源B1の出力制御のためのデューティ比Daに相当するように、デューティ比Da1に応じて設定される。デューティ比Da2は、下記(4)式に示すように、デューティ比Da1に応じて設定される。
Da2=(mDa−nDa1)/(m−n)={mDa−n(1−Db)}/(m−n) ・・・(4)
なお、図5に示した動作例(m=2,n=1)では、(4)式に基づいて、デューティ比Da2は、デューティ比Da2=2×Da−(1−Db)に設定される。
ここで、図7から理解されるように、第1のキャリア周期における位相差φ1=180度である。一方、第2のキャリア周期における位相差φ2は、デューティ比Da2,Db2、すなわち、デューティ比Da,Dbに応じて変化する。このため、デューティ比Da,Dbと位相差φ2との関係を予め求めるとともに、その対応関係を予めマップ(以下、「位相差マップ」とも称する)あるいは関係式(以下、「位相差算出式」とも称する)として制御装置40に記憶することが可能である。
そして、図5で説明した、パラレル接続モードにおける、直流電源B1,B2での電圧/電流制御のためのPWM制御において、算出されたデューティ比Da,Dbに基づいて、上記式(3)および式(4)を用いてデューティ比Da1,Da2を設定するとともに、デューティ比Db1,Db2を設定する。また、第1のキャリア周期における位相差φ1=180度に設定するとともに、位相差マップおよび位相差算出式に従って、デューティ比Da,Dbに基づいて位相差φ2を算出することができる。そして、1調整期間単位で、設定された位相差φ1,φ2を切換えてキャリア波CW1,CW2を発生させ、デューティ比Da1またはDa2とキャリア波CW1との比較に基づくPWM制御、およびデューティ比Db1またはDb2とキャリア波CW2との比較に基づくPWM制御を実行する。このようにして、上述した、スイッチング素子S1〜S4でのスイッチング損失を低減した高効率の直流電力変換を実現することができる。
なお、図5〜図7では、デューティ比Db1,Db2を直流電源B2の出力制御によって算出されるデューティ比Dbに設定し、デューティ比Da1,Da2を調整する場合を説明したが、デューティ比Da1,Da2を直流電源B1の出力制御のためのデューティ比Daに設定し、デューティ比Db1,Db2を調整する場合(第1の変形例)、または、デューティ比Da1,Da2およびDb1,Db2をそれぞれ調整する場合(第2の変形例)においても、同様のデューティ比制御およびキャリア位相制御を実行できる。
(第1の変形例)
図8は、実施の形態1に従うデューティ比制御の第1の変形例を説明するための図表である。図8には、デューティ比Da1およびDa2を、直流電源B1の出力制御のためのデューティ比Daに設定する場合(Da1=Da2=Da)におけるデューティ比Db1,Db2の設定が示される。
図8を参照して、第1のキャリア周期(全合わせ周期)では、デューティ比Da1およびデューティ比Db1の和が1となるように、デューティ比Db1を調整する。デューティ比Db1は、下記(5)式に示すように、デューティ比Da1(=Da)に応じて設定される。
Db1=1−Da1=1−Da ・・・(5)
第2のキャリア周期(昇圧比調整周期)では、デューティ比Db2は、1調整期間(m個のキャリア周期)を通算したデューティ比Dbの平均値が、直流電源B2の出力制御のためのデューティ比Dbに一致するように、デューティ比Db1に応じて設定される。デューティ比Db2は、下記(6)式に示すように、デューティ比Db1に応じて設定される。
Db2=(mDb−nDb1)/(m−n)={mDb−n(1−Da)}/(m−n) ・・・(6)
図8に示した動作例(m=2,n=1)では、(6)式に基づいて、デューティ比Db2は、デューティ比Db2=2×Db−(1−Da)に設定される。
なお、図8から理解されるように、第1のキャリア周期における位相差φ1=180度である。一方、第2のキャリア周期における位相差φ2は、位相差マップおよび位相差算出式に従って、デューティ比Da,Dbに基づいて算出される。
(第2の変形例)
図9は、実施の形態1に従うデューティ比制御の第2の変形例を説明するための図表である。
図9を参照して、第1のキャリア周期(全合わせ周期)では、デューティ比Da1およびデューティ比Db1の和が1となるように、デューティ比Da1およびデューティ比Db1を調整する。デューティ比Da1は、下記式(7)に示すように、直流電源B1の出力制御のためのデューティ比Daと、デューティ比Db1を、直流電源B2の出力制御のためのデューティ比Dbに設定したときのデューティ比Da1(式(3)参照)とを、任意の比率r(0<r<1):(1−r)で足し合わせた値に設定される。
Da1=r×Da+(1−r)×(1−Db) ・・・(7)
デューティ比Db1は、下記式(8)に示すように、直流電源B2の出力制御のためのデューティ比Dbと、デューティ比Da1を、直流電源B1の出力制御のためのデューティ比Daに設定したときのデューティ比Db1(式(5)参照)とを、(1−r):rで足し合わせた値に設定される。
Db1=(1−r)×Db+r×(1−Da) ・・・(8)
第2のキャリア周期(昇圧比調整周期)では、デューティ比Da2は、1調整期間を通算したデューティ比Daの平均値が、直流電源B1の出力制御のためのデューティ比Daに一致するように、デューティ比Da1に応じて設定される。デューティ比Da2は、下記(9)式に示すように、デューティ比Da1に応じて設定される。
Da2=(mDa−nDa1)/(m−n)=[mDa−n{r×Da+(1−r)×(1−Db)}]/(m−n)・・・(9)
デューティ比Db2は、1調整期間を通算したデューティ比Dbの平均値が、直流電源B2の出力制御のためのデューティ比Dbに一致するように、デューティ比Db1に応じて設定される。デューティ比Db2は、下記(10)式に示すように、デューティ比Db1に応じて設定される。
Db2=(mDb−nDb1)/(m−n)=[mDb−n{r×Db+(1−r)×(1−Da)}]/(m−n)・・・(10)
図10に示した動作例(m=2,n=1)において、r=0.5とした場合、デューティ比Da2={3×Da−(1−D2)}/2に設定される。また、デューティ比Db2={3×Db−(1−Da)}/2に設定される。
このように、第2の変形例では、デューティ比Da1およびDb1の間で、任意の比率rに従ってデューティ比の調整量を分配する。これにより、デューティ比Da1のみを調整する場合(図7参照)や、デューティ比Db1のみを調整する場合(図8参照)と比較して、リアクトル電流IL1,IL2の電流波形が、デューティ比制御が非実行であるときの電流波形から大きく変化してしまうのを防ぐことができる。
(直流電源の各動作状態におけるデューティ比制御およびキャリア位相制御)
図5〜図9では、直流電源B1およびB2の両方が力行の状態を説明したが、その他の状態においても、同様のデューティ比制御およびキャリア位相制御を実行できる。
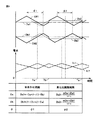
図10では、直流電源B1およびB2の両方が回生状態である。この状態では、第1のキャリア周期(全合わせ周期)において、リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の上昇タイミングとが図中の時刻Taで重なり、かつ、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の下降タイミングとが図中の時刻Tbで重なるような電流位相となるように、デューティ比Da1,Db2および位相差φ1を調整する。なお、直流電源B1およびB2の両方が回生状態である場合、リアクトル電流IL1の下降タイミングは、第1の電流経路から第2の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の上昇タイミングは、第4の電流経路から第3の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。また、リアクトル電流IL1の上昇タイミングは、第2の電流経路から第1の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の下降タイミングは、第3の電流経路から第4の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。
図10には、デューティ比Db1,Db2を、直流電源B2の出力制御のためのデューティ比Dbに設定し、デューティ比Da1をデューティ比Db1(=Db)に応じて設定する例が示される。なお、図10から理解されるように、位相差φ1=180度である。これにより、時刻Taにおけるスイッチング素子S2のターンオン損失およびスイッチング素子S4のターンオフ損失を低減できる。さらに、時刻Tbにおけるスイッチング素子S4のターンオン損失およびスイッチング素子T2のターンオフ損失を低減できる。
第2のキャリア周期(昇圧比調整周期)では、1調整期間を通算したデューティ比Daの平均値が、直流電源B1の出力制御のためのデューティ比Daに相当するように、デューティ比Da2は、式(4)を用いて、デューティ比Da1に応じて設定される。さらに、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の下降タイミングとが図中の時刻Teで重なるような電流位相となるように、位相差φ2を調整する。これにより、時刻Teにおけるスイッチング素子S4のターンオン損失およびスイッチング素子T2のターンオフ損失を低減できる。
図11では、直流電源B1が回生状態である一方で、直流電源B2が力行状態である。この状態では、第1のキャリア周期(全合わせ周期)において、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の上昇タイミングとが図中の時刻Taで重なりかつ、リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の下降タイミングとが図中の時刻Tbで重なるような電流位相となるように、デューティ比Da1,Db2および位相差φ1を調整する。なお、直流電源B1が回生状態である一方で、直流電源B2が力行状態である場合、リアクトル電流IL1の上昇タイミングは、第2の電流経路から第1の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の上昇タイミングは、第4の電流経路から第3の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。また、リアクトル電流IL1の下降タイミングは、第2の電流経路から第1の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の下降タイミングは、第3の電流経路から第4の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。これにより、時刻Taにおけるスイッチング素子S1のターンオン損失およびスイッチング素子S3のターンオフ損失を低減できる。さらに、時刻Tbにおけるスイッチング素子S3のターンオン損失およびスイッチング素子S1のターンオフ損失を低減できる。
具体的には、第1のキャリア周期では、デューティ比Da1とデューティ比Db1とが等しくなるように、デューティ比Da1,Db1を調整する。図11には、デューティ比Db1およびDb2を、直流電源B2の出力制御のためのデューティ比Dbに設定する場合(Db1=Db2=Db)におけるデューティ比Da1,Da2の設定が示される。デューティ比Da1は、下記(11)式に示すように、デューティ比Db1(=Db)に応じて設定される。
Da1=Db1=Db ・・・(11)
第2のキャリア周期(昇圧比調整周期)では、デューティ比Da2は、1調整期間(m個のキャリア周期)を通算したデューティ比Daの平均値が、直流電源B1の出力制御のためのデューティ比Daに一致するように、デューティ比Da1に応じて設定される。デューティ比Da2は、下記(12)式に示すように、デューティ比Da1に応じて設定される。
Da2=(mDa−nDa1)/(m−n)={mDa−nDb)}/(m−n) ・・・(12)
図11に示した動作例(m=2,n=1)では、(12)式に基づいて、デューティ比Da2は、デューティ比Da2=2×Da−Dbに設定される。
図11から理解されるように、第1のキャリア周期における位相差φ1=0である。一方、第2のキャリア周期における位相差φ2は、予め制御装置40に記憶された位相差マップあるいは位相差算出式に従って、デューティ比Da,Dbに基づいて算出される。そして、1調整期間単位で、設定された位相差φ1,φ2を切換えてキャリア波CW1,CW2を発生させ、デューティ比Da1またはDa2とキャリア波CW1との比較に基づくPWM制御、およびデューティ比Db1またはDb2とキャリア波CW2との比較に基づくPWM制御を実行することにより、上述した、スイッチング素子S1〜S4でのスイッチング損失を低減した高効率の直流電力変換を実現することができる。
なお、図11では、デューティ比Db1,Db2を直流電源B2の出力制御のためのデューティ比Dbに設定し、デューティ比Da1,Da2を調整する場合を説明したが、デューティ比Da1,Da2を直流電源B1の出力制御のためのデューティ比Daに設定し、デューティ比Db1,Db2を調整する場合(第3の変形例)、あるいは、デューティ比Da1,Da2およびDb1,Db2をそれぞれ調整する場合(第4の変形例)においても、同様のデューティ比制御およびキャリア位相制御を実行できる。
(第3の変形例)
図12は、実施の形態1に従うデューティ比制御の第3の変形例を説明するための図表である。図12には、デューティ比Da1およびDa2を、直流電源B1の出力制御のためのデューティ比Daに設定する場合(Da1=D2=Da)におけるデューティ比Db1,Db2の設定が示される。
図12を参照して、第1のキャリア周期(全合わせ周期)では、デューティ比Da1とデューティ比Db1とが等しくなるように、デューティ比Db1を調整する。デューティ比Db1は、下記(13)式に示すように、デューティ比Da1(=Da)に応じて設定される。
Db1=Da1=Da ・・・(13)
第2のキャリア周期(昇圧比調整周期)では、デューティ比Db2は、1調整期間(m個のキャリア周期)を通算したデューティ比Dbの平均値が、直流電源B2の出力制御のためのデューティ比Dbに一致するように、デューティ比Db1に応じて設定される。デューティ比Db2は、下記(14)式に示すように、デューティ比Db1に応じて設定される。
Db2=(mDb−nDb1)/(m−n)={mDb−nDa}/(m−n) ・・・(14)
図12に示した動作例(m=2,n=1)では、(14)式に基づいて、デューティ比Db2は、デューティ比Db2=2×Db−Daに設定される。
なお、図12から理解されるように、第1のキャリア周期における位相差φ1=0である。一方、第2のキャリア周期における位相差φ2は、予め制御装置40に記憶された位相差マップあるいは位相差算出式に従って、デューティ比Da,Dbに基づいて算出される。
(第4の変形例)
図13は、実施の形態1に従うデューティ比制御の第4の変形例を説明するための図表である。
図13を参照して、第1のキャリア周期(全合わせ周期)では、デューティ比Da1とデューティ比Db1とが等しくなるように、デューティ比Da1およびデューティ比Db1を調整する。デューティ比Da1は、下記式(15)に示すように、直流電源B1の出力制御のためのデューティ比Daと、デューティ比Db1を、直流電源B2の出力制御のためのデューティ比Dbに設定したときのデューティ比Da1(式(11)参照)とを、任意の比率r:(1−r)で足し合わせた値に設定される。
Da1=r×Da+(1−r)×Db ・・・(15)
デューティ比Db1は、下記式(16)に示すように、直流電源B2の出力制御のためのデューティ比Dbと、デューティ比Da1を、直流電源B1の出力制御のためのデューティ比Daに設定したときのデューティ比Db1(式(13)参照)とを、(1−r):rで足し合わせた値に設定される。
Db1=(1−r)×Db+r×Da ・・・(16)
第2のキャリア周期(昇圧比調整周期)では、デューティ比Da2は、1調整期間を通算したデューティ比Daの平均値が、直流電源B1の出力制御のためのデューティ比Daに相当するように、デューティ比Da1に応じて設定される。デューティ比Da2は、下記(17)式に示すように、デューティ比Da1に応じて設定される。
Da2=(mDa−nDa1)/(m−n)=[mDa−n{r×Da+(1−r)×Db}]/(m−n)・・・(17)
デューティ比Db2は、1調整期間を通算したデューティ比Dbの平均値が、直流電源B2の出力制御のためのデューティ比Dbに相当するように、デューティ比Db1に応じて設定される。デューティ比Db2は、下記(18)式に示すように、デューティ比Db1に応じて設定される。
Db2=(mDb−nDb1)/(m−n)=[mDb−n{(1−r)×Db+r×Da)}]/(m−n)・・・(18)
図13に示した動作例(m=2,n=1)において、r=0.5とした場合、デューティ比Da1=Db1=(Da+Db)/2に設定される。また、デューティ比Da2=(b2=(3×Da−Da)/2に設定され、デューティ比Db2=(−Da+3×Db)/3に設定される。
図14では、直流電源B1が力行状態である一方で、直流電源B2が回生状態である。この状態では、第1のキャリア周期(全合わせ周期)において、リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の下降タイミングとが図中の時刻Taで重なり、かつ、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の上昇タイミングとが図中の時刻Tbで重なるような電流位相となるように、デューティ比Da1,Db2および位相差φ1を調整する。なお、直流電源B1が力行状態である一方で、直流電源B2が回生状態である場合、リアクトル電流IL1の下降タイミングは、第1の電流経路から第2の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の下降タイミングは、第3の電流経路から第4の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。また、リアクトル電流IL1の上昇タイミングは、第2の電流経路から第1の電流経路へ切換えるときのリアクトル電流IL1の変曲点に相当し、リアクトル電流IL2の上昇タイミングは、第4の電流経路から第3の電流経路へ切換えるときのリアクトル電流IL2の変曲点に相当する。これにより、時刻Taにおけるスイッチング素子S3のターンオン損失およびスイッチング素子S1のターンオフ損失を低減できる。さらに、時刻Tbにおけるスイッチング素子S1のターンオン損失およびスイッチング素子S3のターンオフ損失を低減できる。
なお、図14には、デューティ比Db1,Db2を、直流電源B2の出力制御のためのデューティ比Dbに設定し(Db1=Db2=Db)、デューティ比Da1をデューティ比Db1(=Db)に応じて設定する例が示される。図14から理解されるように、位相差φ1=0である。
第2のキャリア周期(昇圧比調整周期)では、1調整期間を通算したデューティ比Daの平均値が、直流電源B1の出力制御のためのデューティ比Daに一致するように、デューティ比Da2は、式(12)を用いて、デューティ比Da1に応じて設定される。さらに、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の上昇タイミングとが図中の時刻Teで重なるような電流位相となるように、位相差φ2を調整する。これにより、時刻Teにおけるスイッチング素子S1のターンオン損失およびスイッチング素子S3のターンオフ損失を低減できる。
このように、直流電源B1およびB2の力行/回生状態の組み合わせによって、第1のキャリア周期(全合わせ周期)におけるデューティ比Da1,Db1および位相差φ1、および第2のキャリア周期(昇圧比調整周期)におけるデューティ比Da2,Db2および位相差φ2が異なる。したがって、力行/回生状態の組み合わせごとに、上述した、デューティ比算出式を設定するとともに、位相差マップまたは位相差算出式を設定することが好ましい。
このように、実施の形態1に従う電力変換器50におけるデューティ比制御およびキャリア位相制御では、電力変換器50の動作状態、具体的には、直流電源B1,B2の電流/電圧制御のためのデューティ比、および直流電源B1,B2の力行/回生状態に応じて、直流電源B1,B2のデューティ比およびキャリア波CW1,CW2の間の位相差φを調整する。特に、1調整期間単位で図6および図8から図14に示した電流位相が実現されるように、デューティ比および位相差φを調整することによって、電力変換器50の動作状態の変化に対応させて、直流電源B1およびB2間の電力配分に影響を及ぼすことなく、スイッチング素子S1〜S4のスイッチング損失が低減された高効率の直流電力変換を実行することができる。
[実施の形態2]
上述のように、実施の形態1に従うデューティ比制御およびキャリア位相制御によれば、電力変換器50をパラレル接続モードで動作させる場合のスイッチング素子S1〜S4のスイッチング損失を低減させることが可能である。実施の形態1に従うデューティ比制御およびキャリア位相制御は、電力変換器50と回路構成が異なる電力変換器に対しても適用することが可能である。
実施の形態2では、電力変換器50と回路構成が異なる電力変換器における制御動作、特にデューティ比制御およびキャリア位相制御について説明する。
(回路構成)
図15は、本発明の実施の形態2に従う電源システムの構成を示す回路図である。
図15を参照して、電源システム5Aは、直流電源B1と、直流電源B2と、電力変換器10と、制御装置40Aとを備える。実施の形態2に従う電源システム5Aは、図1に示された電源システム5と比較して、電力変換器50および制御装置40に代えて、電力変換器10および制御装置40Aを備える。なお、直流電源B1およびB2は、「第1の直流電源」および「第2の直流電源」にそれぞれ対応する。
電力変換器10は、高電圧側の電力線PLおよび低電圧側の電力線GLの間の直流電圧VH(出力電圧VH)を制御するように構成される。電力線GLは、代表的には、接地配線で構成される。
電力変換器10は、電力用半導体スイッチング素子S1〜S5と、リアクトルL1,L2とを含む。本実施の形態において、電力用半導体スイッチング素子(スイッチング素子)としては、IGBT、電力用MOSトランジスタあるいは電力用バイポーラトランジスタ等を用いることができる。
スイッチング素子S1〜S5は、制御装置40Aからの制御信号SG1〜SG5にそれぞれ応答して、オンオフを制御することが可能である。具体的には、スイッチング素子S1〜S5は、制御信号SG1〜SG5がHレベルのときにオン状態となって、電流経路を形成可能な状態となる。一方で、スイッチング素子S1〜S5は、制御信号SG1〜SG5がLレベルのときにオフ状態となって、当該電流経路を遮断する状態となる。
スイッチング素子S1〜S4に対しては、逆並列ダイオードD1〜D4がそれぞれ配置されている。ダイオードD1〜D4は、順バイアス時に、電力線GLから電力線PLへ向かう方向(図中、下から上へ向かう方向)の電流経路を形成するように配置される。一方で、ダイオードD1〜D4は、逆バイアス時には、当該電流経路を非形成とする。具体的には、ダイオードD1は、ノードN1から電力線PLへ向かう方向を順方向とするように接続され、ダイオードD2は、電力線GLからノードN1へ向かう方向を順方向とするように接続される。同様に、ダイオードD3は、電力線GLからノードN2へ向かう方向を順方向とするように接続され、ダイオードD4は、ノードN2から電力線PLへ向かう方向を順方向とするように接続される。
スイッチング素子S1は、電力線PLおよびノードN1の間に電気的に接続される。リアクトルL1および直流電源B1は、ノードN1および電力線GLの間に直列に、電気的に接続される。たとえば、リアクトルL1は、直流電源B1の正極端子およびノードN1の間に電気的に接続されるとともに、直流電源B1の負極端子は、電力線GLと電気的に接続される。スイッチング素子S2は、ノードN1および電力線GLの間に電気的に接続される。なお、リアクトルL1および直流電源B1の接続順序を入れ換えても、電気的には等価な回路構成が維持される。
スイッチング素子S3は、ノードN2および電力線GLの間に電気的に接続される。スイッチング素子S4は、電力線PLおよびノードN2の間に電気的に接続される。スイッチング素子S5は、ノードN1およびN2の間に電気的に接続される。リアクトルL2および直流電源B2は、電力線PLおよびノードN2の間に直列に、電気的に接続される。たとえば、リアクトルL2は、直流電源B2の正極端子および電力線PLの間に電気的に接続されるとともに、直流電源B2の負極端子は、ノードN2と電気的に接続される。なお、リアクトルL2および直流電源B2の接続順序を入れ換えても、電気的には等価な回路構成が維持される。
図15の構成例では、スイッチング素子S1およびダイオードD1は「第1の半導体素子」に対応し、スイッチング素子S2およびダイオードD2は「第2の半導体素子」に対応し、スイッチング素子S3およびダイオードD3は「第3の半導体素子」に対応する。さらに、スイッチング素子S4およびダイオードD4は「第4の半導体素子」に対応し、スイッチング素子S5は「第5の半導体素子」に対応する。また、スイッチング素子S1は「第1のスイッチング素子」に対応し、スイッチング素子S2は「第2のスイッチング素子」に対応し、スイッチング素子S3は「第3のスイッチング素子」に対応し、スイッチング素子S4は「第4のスイッチング素子」に対応し、スイッチング素子S5は「第5のスイッチング素子」に対応する。さらに、リアクトルL1およびL2は、「第1のリアクトル」および「第2のリアクトル」にそれぞれ対応する。図15の例では、スイッチング素子S1〜S5のオンオフ制御により、第1〜第5の半導体素子の各々において、電流経路の形成および遮断を制御することができる。
制御装置40Aは、たとえば、図示しないCPUおよびメモリを有する電子制御ユニット(ECU)によって構成される。制御装置40Aは、メモリに記憶されたマップおよびプログラムに基づいて、各センサによる検出値を用いた演算処理を行なうように構成される。あるいは、制御装置40Aの少なくとも一部は、電子回路等のハードウェアにより所定の数値・論理演算処理を実行するように構成されてもよい。
制御装置40Aは、出力電圧VHを制御するために、スイッチング素子S1〜S5のオンオフを制御する制御信号SG1〜SG5を生成する。なお、図15では図示を省略しているが、直流電源B1の電圧V[1]および電流I[1]、直流電源B2の電圧V[2]および電流I[2]、ならびに、出力電圧VHの検出器(電圧センサ)が設けられている。これらの検出器の出力は、制御装置40Aへ与えられる。
(電力変換器の動作)
実施の形態2に従う電力変換器10は、実施の形態1に従う電力変換器50と同様に、直流電源B1,B2と電力線PL,GLとの間での直流電力変換(DC/DC変換)の態様が異なる複数の動作モードを有する。これらの動作モードは、スイッチング素子のオンオフ制御の態様を切換えることによって選択的に適用される。
電力変換器10の複数の動作モードには、直流電源B1およびB2と電力線PL,GLとの間で並列にDC/DC変換を行なうための「パラレル昇圧モード」と、直列接続された直流電源B1およびB2と電力線PL,GLとの間でDC/DC変換を行なうための「シリーズ昇圧モード」とが含まれる。パラレル昇圧モードは、実施の形態1および特許文献1での「パラレル接続モード」に対応し、シリーズ昇圧モードは、実施の形態1および特許文献1での「シリーズ接続モード」に対応する。実施の形態2では、基本となるパラレル昇圧モードでの動作について説明する。
(パラレル昇圧モードでの回路動作)
次に、電力変換器10のパラレル昇圧モードにおける動作および制御について詳細に説明する。電力変換器10は、パラレル昇圧モードにおいては、直流電源B1およびB2の各々に対して2つの昇圧チョッパ回路を並列に動作させる態様により動作する。すなわち、電力変換器10は、実施の形態1でのパラレル接続モードと同様に、直流電源B1およびB2と電力線PL,GL(負荷30)との間で並列なDC/DC変換を行なうことにより、電圧指令値VH*に従って出力電圧VHを制御する。
図15を参照して、電力変換器10においては、スイッチング素子S5をオンした場合と、オフした場合との間で、直流電源B1およびB2に対して形成される昇圧チョッパ回路が異なることが特徴である。
電力変換器10において、スイッチング素子S5のオフ時には、ノードN1およびN2が電気的に切り離される。このときの電力変換器10の等価回路が図16に示される。
図16を参照して、スイッチング素子S5のオフ時には、直流電源B1に対して、スイッチング素子S2およびダイオードD2を下アームとし、スイッチング素子S1およびダイオードD1を上アームとする昇圧チョッパ回路が形成される。
一方、直流電源B2に対しては、スイッチング素子S4およびダイオードD4を下アームとし、スイッチング素子S3およびダイオードD3を上アームとする昇圧チョッパ回路が形成される。
図17には、図16に示した等価回路図において、直流電源B1,B2の下アームオン時における電流経路が示される。
図17を参照して、スイッチング素子S2をオンすることにより、直流電源B1の出力によりリアクトルL1にエネルギを蓄積するための電流経路111(第1の電流経路)が形成される。すなわち、スイッチング素子S2は、直流電源B1に対応して形成される昇圧チョッパ回路の下アームに相当する。
同様に、スイッチング素子S4をオンすることにより、直流電源B2の出力によりリアクトルL2にエネルギを蓄積するための電流経路112(第3の電流経路)が形成される。すなわち、スイッチング素子S4は、直流電源B2に対応して形成される昇圧チョッパ回路の下アームに相当する。
図18には、図16に示した等価回路図において、直流電源B1,B2の上アームオン時における電流経路が示される。
図18を参照して、スイッチング素子S2をオフすることにより、スイッチング素子S1またはダイオードD1を経由して、リアクトルL1の蓄積エネルギを直流電源B1からのエネルギとともに電力線PLへ出力するための電流経路113(第2の電流経路)が形成される。実施の形態2では、スイッチング素子S1およびS2を相補的にオンオフすることにより、スイッチング素子S2のオフ期間にスイッチング素子S1がオンされる。スイッチング素子S1は、直流電源B1に対応して形成される昇圧チョッパ回路の上アームに相当する。
同様に、スイッチング素子S4をオフすることにより、スイッチング素子S3またはダイオードD3を経由して、リアクトルL2の蓄積エネルギを直流電源B2からのエネルギとともに電力線PLへ出力するための電流経路114(第4の電流経路)が形成される。実施の形態2では、スイッチング素子S3およびS4を相補的にオンオフするので、スイッチング素子S4のオフ期間にスイッチング素子S3がオンする。スイッチング素子S3は、直流電源B2に対応して形成される昇圧チョッパ回路の上アームに相当する。
図17および図18から理解されるように、電流経路111および113を交互に形成することによって、直流電源B1および電力線PL,GLの間のDC/DC変換が実行される。同様に、電流経路112および114を交互に形成することによって、直流電源B2および電力線PL,GLの間のDC/DC変換が実行される。
以下では、直流電源B1に対応して形成される昇圧チョッパ回路の上アームを「B1Uアーム」とも称し、下アームを「B1Lアーム」と称する。同様に、直流電源B2に対応して形成される昇圧チョッパ回路の上アームを「B2Uアーム」とも称し、下アームを「B2Lアーム」とも称する。
B1Lアームは、直流電源B1が力行状態のときにリアクトルL1にエネルギを蓄積するための「第1の電流経路」を形成する一方、直流電源B1が回生状態のときにリアクトルL1の蓄積エネルギを直流電源B1に出力するための「第2の電流経路」を形成する。B1Uアームは、直流電源B1が力行状態のときにリアクトルL1の蓄積エネルギを直流電源B1のエネルギとともに電力線PLに出力するための「第2の電流経路」を形成する一方で、直流電源B1が回生状態のときに電力線PLからの出力をリアクトルL1にエネルギを蓄積するための「第1の電流経路」を形成する。
また、B2Lアームは、直流電源B2が力行状態のときにリアクトルL2にエネルギを蓄積するための「第3の電流経路」を形成する一方、直流電源B2が回生状態のときにリアクトルL2の蓄積エネルギを直流電源B2に出力するための「第4の電流経路」を形成する。B2Uアームは、直流電源B2が力行状態のときにリアクトルL2の蓄積エネルギを直流電源B2のエネルギとともに電力線PLに出力するための「第3の電流経路」を形成する一方で、直流電源B2が回生状態のときに電力線PLからの出力をリアクトルL2にエネルギを蓄積するための「第4の電流経路」を形成する。なお、スイッチング素子S1〜S5の各々は、第1および第2の電流経路のいずれか一方と、第3および第4の電流経路のいずれか一方との両方に含まれるように配置される。
図17から理解されるように、B1LアームおよびB2Lアームの形成時には、ノードN2からN1へ向かう電流経路が形成されると、電力線PLから電力線GLへの短絡経路が形成されてしまうため、当該電流経路を遮断する必要がある。同様に、図18から理解されるように、B1UアームおよびB2Uアームの形成時には、ノードN1からN2へ向かう電流経路が形成されると、電力線PLから電力線GLへの短絡経路が形成されてしまうため、当該電流経路を遮断する必要がある。したがって、B1LアームおよびB2Lアームの形成時、および、B1UアームおよびB2Uアームの形成時の各々では、スイッチング素子S5をオフすることによって、上記短絡経路の形成を回避することができる。
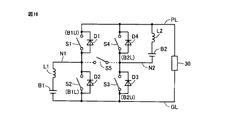
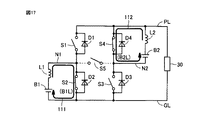
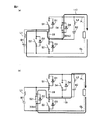
一方で、電力変換器10では、スイッチング素子S5のオン時には、ノードN1およびN2が電気的に接続される。このときの電力変換器10の等価回路が図19に示される。
図19を参照して、直流電源B1に関して、スイッチング素子S5によってノードN2がノードN1と電気的に接続されるので、ノードN2および電力線GLの間に接続されたスイッチング素子S3を、直流電源B1の下アーム(B1Lアーム)として昇圧チョッパ回路を形成することができる。同様に、ノードN2および電力線PLの間に電気的に接続されたスイッチング素子S4を直流電源B1の上アーム(B1Uアーム)として、昇圧チョッパ回路を形成することができる。
また、直流電源B2に対しては、ノードN1および電力線PLの間に接続されたスイッチング素子S1を下アーム(B2Lアーム)とし、スイッチング素子S2を上アーム(B2Uアーム)とした昇圧チョッパ回路を形成することができる。
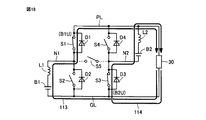
図20には、図19に示した等価回路図において、直流電源B1,B2の下アームオン時における電流経路が示される。
図20(a)を参照して、スイッチング素子S3,S5をオンすることにより、直流電源B1の出力によりリアクトルL1にエネルギを蓄積するための電流経路115(第1の電流経路)が形成される。一方で、図20(b)に示されるように、スイッチング素子S1,S5をオンすることにより、直流電源B2の出力によりリアクトルL2にエネルギを蓄積するための電流経路116(第3の電流経路)が形成される。
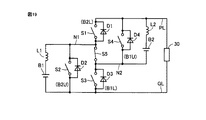
図21には、図19に示した等価回路図において、直流電源B1,B2の上アームオン時における電流経路が示される。
図21(a)を参照して、直流電源B1に関して、スイッチング素子S5がオンされた状態でスイッチング素子S3をオフすることにより、スイッチング素子S4またはダイオードD4を経由してリアクトルL1の蓄積エネルギを直流電源B1からのエネルギとともに電力線PLへ出力するための電流経路117(第2の電流経路)が形成される。上述のように、スイッチング素子S3およびS4は相補的にオンオフされるので、スイッチング素子S3によってB1Lアームを形成するとともに、スイッチング素子S4によってB1Uアームを形成することができる。
図21(b)を参照して、直流電源B2に関しては、スイッチング素子S5がオンされた状態でスイッチング素子S1をオフすることにより、スイッチング素子S2またはダイオードD2を経由してリアクトルL2の蓄積エネルギを直流電源B2からのエネルギとともに電力線PLへ出力するための電流経路118(第4の電流経路)が形成される。上述のように、スイッチング素子S1およびS2は相補的にオンオフされるので、スイッチング素子S1によってB2Lアームを形成するとともに、スイッチング素子S2によってB2Uアームを形成することができる。
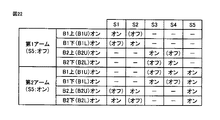
図22には、スイッチング素子S5のオフ時およびオン時にそれぞれ形成される昇圧チョッパ回路の各アームとスイッチング素子のオンオフとの対応関係が示される。
図22を参照して、スイッチング素子S5のオフ時(図16〜図18)に形成される昇圧チョッパ回路における各アームを「第1アーム」と称し、スイッチング素子S5のオン時(図19〜図21)に形成される昇圧チョッパ回路の各アームを「第2アーム」と称することとする。
スイッチング素子S5のオフ時、すなわち第1アームの形成時には、直流電源B1に対して、上述のように、スイッチング素子S2のオンによってB1Lアームがオンされる一方で、スイッチング素子S1のオン(スイッチング素子S2のオフ)によってB1Uアームがオンされる。また、直流電源B2に対しては、スイッチング素子S4のオンによってB2Lアームがオンされる一方で、スイッチング素子S3のオン(スイッチング素子S4のオフ)によってB2Uアームがオンされる。
一方で、スイッチング素子S5のオン時、すなわち第2アームの形成時には、直流電源B1に対して、上述のように、スイッチング素子S3のオンによってB1Lアームがオンされる一方で、スイッチング素子S4のオン(スイッチング素子S3のオフ)によってB1Uアームがオンされる。また、直流電源B2に対しては、スイッチング素子S1のオンによってB2Lアームがオンされる一方で、スイッチング素子S2のオン(スイッチング素子S1のオフ)によってB2Uアームがオンされる。
このように、第1アームおよび第2アームのいずれにおいても、スイッチング素子S1およびS2を相補的にオンオフするとともに、スイッチング素子S3およびS4を相補的にオンオフすることにより、直流電源B1およびB2の各々に対して、上アームおよび下アームが交互にオンオフされるように制御することができる。
実施の形態2に従う電力変換器10のパラレル昇圧モードでは、図22に示された第1アームおよび第2アームを併用してDC/DC変換を実行する。ただし、図22に示したように、各スイッチング素子S1〜S5は、直流電源B1,B2の一方に対して第1アームとして動作するとともに、直流電源B1,B2の他方に対して第2アームとして動作する。このような、第1アームおよび第2アーム間の干渉により、第2アームを適用できる期間が限定される点に留意する必要がある。
具体的には、直流電源B1,B2の一方について第2アームをオンすると、直流電源B1,B2の他方に対しては、上下反対側の第1アームがオンされることになる。たとえば、スイッチング素子S3,S5をオンして第2アームのうちのB1Lアームをオンすると(図20(a))、スイッチング素子S3のオンに応じて、図18と同様に、直流電源B2に対しては第1アームのうちのB2Uアームがオンされる。反対に、スイッチング素子S4,S5のオンによって第2アームのうちのB1Uアームをオンすると(図21(a))、図17と同様に、直流電源B2に対しては第1アームのうちのB2Lアームがオンする。
図20(a),(b)からも理解されるように、第2アームの形成時に、B1LアームおよびB2Lアームの両方をオンした場合には、オン状態のスイッチング素子S1,S3,S5を経由して、電力線PLおよびGL間に短絡経路が形成されてしまう。このため、上述のように、B1LアームおよびB2Lアームの両方をオンする場合には、スイッチング素子S5のオフによって、第1アーム(図17)を適用することが必要である。
同様に、図21(a),(b)からも理解されるように、第2アームの形成時に、B1UアームおよびB2Uアームの両方をオンした場合には、オン状態のスイッチング素子S4,S5,S2を経由して、電力線PLおよびGL間に短絡経路が形成されてしまう。このため、上述のように、B1UアームおよびB2Uアームの両方をオンする場合には、スイッチング素子S5のオフによって、第1アーム(図18)を適用することが必要である。
したがって、第2アームを使用できる期間は、直流電源B1,B2の間で、上アームへの指令(オン/オフ)と下アームへの指令(オン/オフ)とが異なる期間に限定される。すなわち、直流電源B1に対して上アームオンが指令されている一方で直流電源B2に対して下アームオンが指令されている期間、または、直流電源B1に対して下アームオンが指令されている一方で直流電源B2に対して上アームオンが指令されている期間に限って、第2アームを使用することができる。
図23には、パラレル昇圧モードにおけるスイッチング素子S1〜S5の各々についてのオンオフ制御のための論理演算式が示される。
図23を参照して、制御パルス信号SD1は、直流電源B1に対応する昇圧チョッパ回路における下アームをオンオフ制御するための制御パルス信号に相当する。すなわち、制御パルス信号SD1のHレベル時には、直流電源B1に対する下アームオンが指示される。制御パルス信号SD1のHレベル期間が長くなる程、直流電源B1からの出力が増加することになる。
制御パルス信号/SD1は、制御パルス信号SD1の反転信号である。すなわち、制御パルス信号/SD1のHレベル時には、直流電源B1に対する上アームオンが指示される。制御パルス信号/SD1のHレベル期間(すなわち、制御パルス信号SD1のLレベル期間)が長くなる程、直流電源B1からの出力が減少することになる。
同様に、制御パルス信号SD2は、直流電源B2に対応する昇圧チョッパ回路における下アームをオンオフ制御するための制御パルス信号に相当し、制御パルス信号/SD2は、制御パルス信号SD2の反転信号である。すなわち、制御パルス信号SD2のHレベル時には、直流電源B2の下アームオンが指示される一方で、制御パルス信号/SD2のHレベル時には、直流電源B2の上アームオンが指示される。そして、制御パルス信号SD2のHレベル期間が長くなる程、直流電源B2からの出力が増加する一方で、制御パルス信号/SD1のHレベル期間(すなわち、制御パルス信号SD2のLレベル期間)が長くなる程、直流電源B1からの出力が減少することになる。
電力変換器10のパラレル昇圧モードでは、スイッチング素子S2は、制御パルス信号SD1に対応してオンオフ制御されるとともに、スイッチング素子S1は、制御パルス信号/SD1に応答してオンオフされる。さらに、スイッチング素子S4は、制御パルス信号SD2に応じてオンオフ制御されるとともに、スイッチング素子S3は制御パルス信号/SD2に応答してオンオフされる。さらに、スイッチング素子S5は、制御パルス信号SD1およびSD2の排他的論理和(xor)に従ってオンオフ制御される。
制御パルス信号SD1およびSD2の論理レベルが等しいとき(すなわち、SD1=SD2=H、または、SD1=SD2=L)である場合には、スイッチング素子S5はオフされる。すなわち、スイッチング素子S2,S4のオンオフ状態が同一であるときには、スイッチング素子S5がオフされる。このとき、直流電源B1,B2のそれぞれに対して、第1アームを用いた昇圧チョッパ回路が構成される。
したがって、第1アームを用いる場合には、制御パルス信号SD1およびSD2の論理レベルが等しいので、スイッチング素子S2,S4は共通にオンオフされることが理解される。さらに、スイッチング素子S1,S3についても共通にオンオフされる。さらに、スイッチング素子S1,S3のペアと、スイッチング素子S2,S4のペアとは、相補的にオンオフされることになる。したがって、スイッチング素子S1およびS2の相補的なオンオフ、ならびに、スイッチング素子S3およびS4の相補的なオンオフは確保されている。
一方で、制御パルス信号SD1およびSD2の論理レベルが異なる場合(すなわち、SD1=H,SD2=L、または、SD1=L,SD2=H)には、スイッチング素子S5がオンされる。すなわち、スイッチング素子S2,S4のオンオフ状態が異なるときには、スイッチング素子S5がオンされる。このとき、直流電源B1,B2のそれぞれに対して、第2アームを用いた昇圧チョッパ回路が構成される。
したがって、第2アームを用いる場合には、スイッチング素子S2,S3が共通にオンオフされるとともに、スイッチング素子S1,S4が共通にオンオフされる。そして、スイッチング素子S1,S3のペアと、スイッチング素子S2,S4のペアとは、相補的にオンオフされることになる。したがって、第2アームの使用時にも、スイッチング素子S1およびS2の相補的なオンオフ、ならびに、スイッチング素子S3およびS4の相補的なオンオフは確保されている。
このように、図23に示した論理演算式に従って、スイッチング素子S1〜S5のオンオフを、制御パルス信号SD1,SD2に応じて制御することにより、第1アームを用いる昇圧チョッパ回路と、第2アームを形成する用いる昇圧チョッパ回路とを自動的に選択しながら、パラレル昇圧モードにおけるDC/DC変換を実行することができる。特に、スイッチング素子S5によるノードN1,N2間の電流経路の形成/遮断の制御によって、電力線PL,GL間に短絡経路が形成されることを回避しながら、第1アームおよび第2アームを切換えることができる。
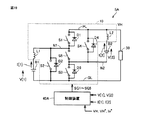
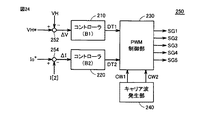
図24は、電力変換器10のパラレル昇圧モード時における直流電源B1,B2の出力制御例を説明するため機能ブロック図である。なお、図24中の各機能ブロックについて、制御装置40Aによるソフトウェア処理および/またはハードウェア処理によってその機能が実現されるものとする。
図24を参照して、パラレル昇圧モードでは、実施の形態1のパラレル接続モードと同様に、直流電源B1およびB2の一方の出力を、出力電圧VHの電圧偏差ΔV(ΔV=VH*−VH)を補償するように制御(電圧制御)するとともに、直流電源B1およびB2の他方の出力を、電流I[1]またはI[2]の電流偏差を補償するように制御(電流制御)することができる。たとえば、電流制御の指令値(Io*)は、当該電源の出力電力を制御するように設定することができる。
一例として、パラレル昇圧モードにおけるコンバータ制御部250は、直流電源B1の出力を電圧制御する一方で、直流電源B2の出力を電流制御するように、電力変換器10を制御する。この場合には、直流電源B2の電力指令値P[2]*および電圧V[2]を用いて、Io*=P[2]*/V[2]に設定すると、直流電源B2の入出力電圧を電力指令値P[2]*に従って制御することができる。
コンバータ制御部250は、減算部252,254と、直流電源B1の出力を制御するためのコントローラ210と、直流電源B2の出力を制御するためのコントローラ220と、PWM制御部230と、キャリア波発生部240とを含む。
減算部252は、電圧制御のための電圧偏差ΔVを演算する(ΔV=VH*−VH)。コントローラ210は、電圧偏差ΔVを補償するためのフィードバック制御(たとえばPI制御)によって、直流電源B1の出力デューティ比DT1(以下、単にデューティ比DT1と称する)を演算する。なお、直流電源B1の出力電圧V[1]および電圧指令値VH*の電圧比から求められる理論昇圧比をさらに反映して、デューティ比DT1を演算することも可能である。
減算部254は、電流制御のための電流偏差ΔIを演算する(ΔI=Io*−I[2])。コントローラ220は、電圧偏差ΔVを補償するためのフィードバック制御(たとえば、PI制御)によって、直流電源B2の出力デューティ比DT2(以下、単にデューティ比DT2と称する)を演算する。なお、直流電源B2の出力電圧V[2]および電圧指令値VH*の電圧比から求められる理論昇圧比をさらに反映して、デューティ比DT2を演算することも可能である。
キャリア波発生部240は、直流電源B1の制御に用いるキャリア波CW1および、直流電源B2の制御に用いるCW2を発生する。PWM制御部230は、デューティ比DT1およびキャリア波CW1の比較に基づくPWM制御と、キャリア波CW2およびデュー
ティ比DT2との比較に基づくPWM制御との組合せにより、制御信号SG1〜SG5を生成する。キャリア波CW1およびCW2は、スイッチング周波数に相当する同一周波数を有する。
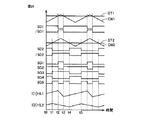
図25には、パラレル接続モードにおけるPWM制御部230の動作を説明するための波形図が示される。
図25を参照して、直流電源B1に対して、制御パルス信号SD1,/SD1は、キャリア波CW1とデューティ比DT1との電圧比較に基づくPWM制御によって生成される。DT1>CW1の期間では、制御パルス信号SD1がHレベルに設定される一方で、CW1<DT1の期間では、制御パルス信号SD1がLレベルに設定される。したがって、デューティ比DT1の上昇に応じて、制御パルス信号SD1のHレベル期間が長くなり、制御パルス信号/SD1のLレベル期間が短くなる。上述のように、制御パルス信号SD1のHレベル期間には、直流電源B1の下アームオンが指令されるので、デューティ比DT1の上昇に応じて直流電源B1の出力が増加する一方で、デューティ比DT1の低下に応じて直流電源B1の出力が減少する。このように、直流電源B1からの出力制御のための制御パルス信号SD1に基づいて、スイッチング素子S2のオン期間およびオフ期間の比率が制御される。
同様に、直流電源B2に対しても、デューティ比DT2とキャリア波CW2との電圧比較に基づくPWM制御よって、制御パルス信号SD2,/SD2が生成される。制御パルス信号SD1,/SD1と同様に、DT2>CW2の期間では、制御パルス信号SD2がHレベルに設定される一方で、CW2<DT2の期間では、制御パルス信号SD2はLレベルに設定される。制御パルス信号SD2のHレベル期間には、直流電源B2の下アームオンが指令されるため、デューティ比DT2の上昇に応じて直流電源B2の出力が増加する一方で、デューティ比DT2の低下に応じて直流電源B2の出力が減少する。このように、直流電源B2からの出力制御のための制御パルス信号SD2に基づいて、スイッチング素子S4のオン期間およびオフ期間の比率が制御される。
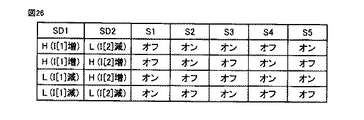
制御信号SG1〜SG5は、図23に示された論理演算式に従って、上記PWM制御によって得られた制御パルス信号SD1,/SD1,SD2,/SD2に応じて生成される。ここで、図23に示した論理式に従えば、制御パルス信号SD1のH/Lレベルと、制御パルス信号SD2のH/Lレベルとの組合せに応じて、スイッチング素子S1〜S5のスイッチングパターンは、図26に示す4通りに限定される。
図26は、パラレル昇圧モードにおけるスイッチング素子S1〜S5のオンオフパターン(スイッチングパターン)の一覧を示す図表である。
図25を参照して、時刻t0〜t1間では、SD1=SD2=Hである。このとき、図26に示されるように、制御信号SG1=SG3=SG5=Lとなる一方で、SG2=SG4=Hとなる。したがって、スイッチング素子S5がオフされて、第1アームを用いた昇圧チョッパ回路が形成される下で、スイッチング素子S1,S3がオフする一方で、スイッチング素子S2,S4がオンする。
このとき、図22から理解されるように、第1アームのうちのB1LアームおよびB2Lアームがオンされる。すなわち、直流電源B1およびB2の各々に対して下アームオンが指令される。したがって、時刻t0〜t1間では、リアクトル電流IL1およびIL2の両方が上昇する。なお、図15の回路構成から明らかなとおり、リアクトル電流IL1は直流電源B1の電流I[1]に相当し、リアクトル電流IL2は直流電源B1の電流I[2]に相当する。
再び図25を参照して、時刻t1において制御パルス信号SD2がHレベルからLレベルへ変化するため、時刻t1〜t2間では、SD1=H、かつ、SD2=Lである。このとき、図26に示されるように、制御信号SG2=SG3=SG5=Hとなる一方で、SG1=SG4=Lとなる。したがって、スイッチング素子S5がオンされて、第2アームを用いた昇圧チョッパ回路が形成される下で、スイッチング素子S2,S3がオンする一方で、スイッチング素子S1,S4がオフする。
このとき、図22から理解されるように、第1アームのうちのB1LアームおよびB2Uアームがオンされる。すなわち、直流電源B1に対して下アームオンが指令される一方で、直流電源B2に対して上アームオンが指令される。したがって、時刻t1〜t2間では、リアクトル電流IL1が上昇する一方で、リアクトル電流IL2は低下する。
再び図25を参照して、時刻t2において制御パルス信号SD1がHレベルからLレベルへ変化するため、時刻t2〜t3間では、SD1=SD2=Lである。このとき、図26に示されるように、制御信号SG2=SG4=SG5=Lとなる一方で、SG1=SG3=Hとなる。したがって、スイッチング素子S5がオフされて第1アームを用いる昇圧チョッパ回路が形成される下で、スイッチング素子S1,S3がオンする一方で、スイッチング素子S2,S4がオフする。
このとき、図22から理解されるように、第1アームのうちのB1UアームおよびB2Uアームがオンされる。すなわち、直流電源B1およびB2の各々に対して上アームオンが指令される。したがって、時刻t2〜t3間では、リアクトル電流IL1およびIL2の両方が低下する。
再び図25を参照して、時刻t3において制御パルス信号SD1がLレベルからHレベルへ変化するため、時刻t3〜t4間では、SD1=H、かつ、SD2=Lである。したがって、時刻t0〜t1間におけるスイッチングパターンが再現されることにより、第1アームの使用下で、リアクトル電流IL1が上昇する一方で、リアクトル電流IL2が低下するように、スイッチング素子S1〜S5が制御される。
なお、図25の動作例では、DT1>DT2であるため、時刻t0〜t1間とは反対にSD1=L、かつ、SD2=Hとなる期間が存在していないが、当該期間においては、図26に示されるように、制御信号SG1=SG4=SG5=Hとなる一方で、SG2=SG3=Lとなる。したがって、スイッチング素子S5がオンされて、第2アームを用いる昇圧チョッパ回路が形成される下で、スイッチング素子S1,S4がオンする一方で、スイッチング素子S2,S3がオフする。
このとき、図22から理解されるように、第2アームのうちのB1UアームおよびB2Lアームがオンされる。すなわち、直流電源B2に対して下アームオンが指令される一方で、直流電源B1に対して上アームオンが指令される。したがって、当該期間では、リアクトル電流IL2が上昇する一方で、リアクトル電流IL1が低下するように、スイッチング素子S1〜S5が制御されることが理解される。
図25での時刻t4以降についても、デューティ比DT1,DT2に応じたPWM制御によって、図26に示されたスイッチングパターンに従って、スイッチング素子S1〜S5を同様に制御することができる。
このように、実施の形態2に従う電力変換器10によれば、パラレル昇圧モードにおいて、直流電源B1,B2の出力制御のデューティ比DT1およびDT2に応じて、図23に示した論理式に従って、スイッチング素子S1〜S5がオンオフ制御される。これにより、第1アームを用いる昇圧チョッパ回路が形成される期間と、第2アームを用いる昇圧チョッパ回路が形成される期間とを自動的に切換えながら、直流電源B1およびB2が、電力線PL,GLに対して並列にDC/DC変換を実行することができる。
特に、デューティ比DT1,DT2に基づく直流電源B1およびB2からの出力制御によって、直流電源B1,B2の一方を電圧制御(VH→VH*)するとともに、直流電源B1,B2の他方を電流制御(I[1]またはI[2]→Io*)するように、電力変換器10を制御することができる。これにより、パラレル昇圧モードでは、負荷30への入出力電力(電力変換器10全体の入出力電力)のうちの、電流制御される直流電源の入出力電力を制御することが可能となる。
すなわち、電力変換器10は、パラレル昇圧モードでは、実施の形態1に従う電力変換器50におけるパラレル接続モードと同様に、直流電源B1およびB2間の電力配分を制御するとともに、出力電圧VHを電圧指令値VH*に制御することができる。
(パラレル昇圧モードでのスイッチング損失低減のための制御動作)
上述のように、実施の形態2に従う電力変換器10をパラレル昇圧モードで動作させる場合には、直流電源B1および直流電源B2のそれぞれについてPWM制御が並列に実行される。電力変換器10におけるパラレル昇圧モードにおいても、実施の形態1に従う電力変換器50におけるパラレル接続モードと同様に、デューティ比制御およびキャリア位相制御を実行することによって、DC/DC変換におけるスイッチング損失を低減することが可能である。
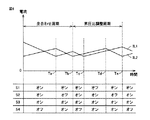
図27は、実施の形態2に従う電力変換器10に対するデューティ比制御およびキャリア位相制御の適用を説明するための波形図である。
実施の形態2に従う電力変換器10では、実施の形態1に従う電力変換器50と同様に、複数のキャリア周期を1調整期間として、当該1調整期間を通算したデューティ比DT1,DT2の平均値がそれぞれ、直流電源B1,B2の電圧/電流制御のためのデューティ比に相当するように、デューティ比DT1,DT2を調整する。すなわち、1調整期間単位で、直流電源B1,B2の電圧/電流制御のためのデューティ比を保障することにより、デューティ比DT1,DT2を変化させても直流電源B1およびB2間の電力配分に影響を生じさせないようにする。
具体的には、実施の形態1におけるデューティ比制御と同様に、m個のキャリア周期を1調整期間とし、当該1調整期間を、n個の第1のキャリア周期(全合わせ周期)と、(m−n)個の第2のキャリア周期(昇圧比調整周期)とから構成する。図27では、説明の簡素化のため、m=2とし、かつ、n=1としたときの電力変換器50の動作例を示している。すなわち、図27は、第1のキャリア周期と第2のキャリア周期とが交互に形成される例を示している。
第1のキャリア周期(全合わせ周期)では、リアクトル電流IL1の2つの変曲点(極大点および極小点)と、リアクトル電流IL2の2つの変曲点とがそれぞれ同一タイミングとなるように、デューティ比DT1,DT2を調整するとともに、キャリア波CW1,CW2間の位相差φを調整する。図27では、第1のキャリア周期における直流電源B1のデューティ比をDT11とし、直流電源B2のデューティ比をDT21とする。また、第1のキャリア周期における位相差をφ1とする。
一方、第2のキャリア周期(昇圧比調整周期)では、1調整期間におけるデューティ比DT1,DT2の通算値がそれぞれ、直流電源B1,B2の電圧/電流制御のためのデューティ比に相当するように、第1のキャリア周期におけるデューティ比DT11,DT21に基づいて、デューティ比DT1,DT2を調整する。図27では、第2のキャリア周期における直流電源B1のデューティ比をDT12とし、直流電源B2のデューティ比をDT22とする。さらに、リアクトル電流IL1の2つの変曲点の一方と、リアクトル電流IL2の2つの変曲点の一方とが同一タイミングとなるように、調整されたデューティ比DT12,DT22に応じて位相差φを調整する。第2のキャリア周期における位相差をφ2とする。
次に、第1のキャリア周期および第2のキャリア周期における電力変換器10の動作および制御について詳細に説明する。以下では、代表的な例として、直流電源B1およびB2の両方が力行状態、すなわちリアクトル電流IL1>0かつリアクトル電流IL2>0である状態での制御について説明する。
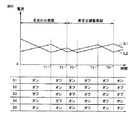
図28は、電力変換器10においてパラレル昇圧モードにおけるスイッチング損失を低減するための、実施の形態2によるデューティ比制御およびキャリア位相制御による電流位相を説明する波形図である。
(1)第1のキャリア周期における制御動作
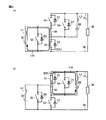
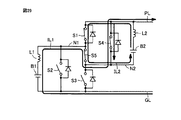
図28を参照して、時刻T1までは、スイッチング素子S5がオンされるので、第2アームを用いた昇圧チョッパ回路が形成される下で、スイッチング素子S1,S4がオンする一方で、スイッチング素子S2,S3がオフする。これにより、第2アームのうちのBIUアームおよびB2Lアームがオンされる。したがって、時刻T1までは、リアクトル電流IL1が下降する一方で、リアクトル電流IL2は上昇する。このとき、電力変換器50での電流経路は、図29のようになる。図29から理解されるように、スイッチング素子S1およびS4は、直流電源B1の上アームとしてスイッチング素子S5を経由して、ノードN1および電力線PLの間に電気的に並列接続される構成となる。さらに、スイッチング素子S1およびS4は、直流電源B2の下アームとしては、スイッチング素子S5およびリアクトルL2を経由して、直流電源B2の正極端子および負極端子間に電気的に並列接続される。この結果、B1UアームおよびB2Lアームの各々について、2個のスイッチング素子による電流経路が並列に存在することになる。図29の状態では、スイッチング素子S4には、リアクトル電流IL1およびIL2の差電流が通過することになるため、スイッチング素子S4の通過電流が小さくなる。
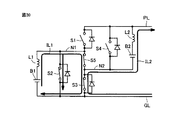
時刻T1において、スイッチング素子S3がターンオンされることにより、第2アームのうちのB1Lアームがオンされるため、リアクトル電流IL1が上昇を開始する。また、スイッチング素子S2がターンオフすると、第2アームのうちのB2Uアームがオンされるため、リアクトル電流IL2が下降を開始する。すなわち、電力変換器50での電流経路が、図29の状態から、図30の状態に変化する。図30から理解されるように、スイッチング素子S2およびS3は、直流電源B2の上アームとして、スイッチング素子S5を経由して、ノードN2および電力線GLの間に電気的に並列接続される構成となる。さらに、スイッチング素子S2およびS3は、直流電源B1の下アームとしては、スイッチング素子S5およびリアクトルL1を経由して、直流電源B1の正極端子および負極端子の間に電気的に並列接続される。図30の状態では、スイッチング素子S3には、リアクトル電流IL1およびIL2の差電流が通過することになるため、スイッチング素子S3の通過電流が小さくなる。
図29の状態でスイッチング素子S4をターンオフさせることにより、スイッチング素子S4のターンオフ時の電流、すなわち、ターンオフ損失を低減できる。また、図30の状態でスイッチング素子S3をターンオンさせることにより、スイッチング素子S3のターンオン時の電流、すなわち、ターンオン損失を低減できる。
したがって、図28に示されるように、リアクトル電流IL1の上昇タイミングと、リアクトル電流IL2の下降タイミングとが重なるように、デューティ比DT11,DT21を調整するとともに位相差φ1を調整する。これにより、時刻T1において、スイッチング素子S4がターンオフされるとともに、スイッチング素子S3がターンオンされる。
さらに、実施の形態2では、時刻T2において、スイッチング素子S5がオンされて、第2アームを用いた昇圧チョッパ回路が形成される下で、スイッチング素子S2,S3がターンオフされるとともに、スイッチング素子S1,S4がターンオンされる。これにより、第2アームのうちのB1UアームおよびB2Lアームがオンされるため、リアクトル電流IL1が再び下降を開始するとともに、リアクトル電流IL2が再び上昇を開始する。すなわち、電力変換器50での電流経路が、図30の状態から、図29の状態に変化する。図28に示されるように、リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の上昇タイミングとが時刻T2で一致することによって、時刻T2におけるスイッチング素子S3のターンオフ損失およびスイッチング素子S4のターンオン損失を低減できる。
このように、第1のキャリア周期では、デューティ比DT11,DT21を調整するとともに、キャリア波CW1,CW2間の位相差φを調整することにより、直流電源B1およびB2の両方が力行となる状態では、リアクトル電流IL1の上昇タイミングとリアクトル電流IL2の下降タイミングとが重なるとともに、リアクトル電流IL1の下降タイミングとリアクトル電流IL2の上昇タイミングとが重なる。すなわち、スイッチング素子S4のターンオフタイミングと、スイッチング素子S3のターンオンタイミングとが一致するとともに、スイッチング素子S4のターンオンタイミングと、スイッチング素子S3のターンオフタイミングとが一致する。このように、第1のキャリア周期では、リアクトル電流IL1の2つの変曲点と、リアクトル電流IL2の2つの変曲点とがそれぞれ同一タイミングとなることによって、スイッチング素子S1〜S4でのスイッチング損失が低減されることが理解される。
(第2のキャリア周期における制御動作)
時刻T2〜T5までの第2のキャリア周期では、第1のキャリア周期および第2のキャリア周期(1調整期間)を通算したデューティ比DT1の平均値が、直流電源B1の出力制御のためのデューティ比DT1に相当するように、デューティ比DT12を調整する。同様に、第1のキャリア周期および第2のキャリア周期(1調整期間)を通算したデューティ比DT2の平均値が、直流電源B2の出力制御のためのデューティ比DT2に相当するように、デューティ比DT22を調整する。
時刻T3では、スイッチング素子S5がターンオフされて、第1アームを用いた昇圧チョッパ回路が形成される下で、スイッチング素子S2,S4がターンオンされる一方で、スイッチング素子S1,S3がターンオフされる。これにより、第1アームのうちのB1LアームおよびB2Lアームがオンされる。したがって、時刻T3〜T4間ではリアクトル電流IL1およびIL2の両方が上昇する。
時刻T4において、スイッチング素子S5がターンオンされて、第2アームを用いた昇圧チョッパ回路が形成される下で、スイッチング素子S3がターンオンされる一方で、スイッチング素子S4がターンオフされる。このとき、第2アームのうちのB1LアームおよびB2Uアームがオンされるため、リアクトル電流IL2が下降を開始する。これにより、時刻T1以降の状態が再現される。第2のキャリア周期では、リアクトル電流IL1の下降タイミングと、リアクトル電流IL2の上昇タイミングとが重なるように、位相差φ2を調整する。これにより、時刻T5において、スイッチング素子S1,S4がターンオンされるとともに、スイッチング素子S2,S3がターンオフされる。したがって、第2のキャリア周期では、時刻T5におけるスイッチング素子S4のターンオン損失およびスイッチング素子S3のターンオフ損失を低減できる。
図31は、実施の形態2に従うデューティ比制御を説明するための図表である。図31には、デューティ比DT21およびDT22を、直流電源B2の出力制御のためのデューティ比DT2に設定する場合(DT21=DT22=DT2)におけるデューティ比DT11,DT12の設定が示される。
図31を参照して、第1のキャリア周期(全合わせ周期)では、デューティ比DT11およびデューティ比DT21の和が1となるように、デューティ比DT11を調整する。デューティ比DT11は、下記(19)式に示すように、デューティ比DT21(=DT2)に応じて設定される。
DT11=1−DT21=1−DT2 ・・・(19)
第2のキャリア周期(昇圧比調整周期)では、デューティ比DT12は、1調整期間(m個のキャリア周期)を通算したデューティ比DT1の平均値が、直流電源B1の出力制御のためのデューティ比DT1に一致するように、デューティ比DT11に応じて設定される。デューティ比DT12は、下記(20)式に示すように、デューティ比DT11に応じて設定される。
DT12=(mDT1−nDT11)/(m−n)={mDT1−n(1−DT2)}/(m−n) ・・・(20)
図28に示した動作例(m=2,n=1)では、(20)式に基づいて、デューティ比DT12は、デューティ比DT12=2×DT1−(1−DT2)に設定される。
なお、図31から理解されるように、第1のキャリア周期における位相差φ1=180度である。一方、第2のキャリア周期における位相差φ2は、デューティ比DT12,DT22、すなわち、デューティ比DT1,DT2に応じて変化する。このため、デューティ比DT1,DT2と位相差φ2との関係を予め求めるとともに、その対応関係を予め位相差マップあるいは位相差算出式として制御装置40Aに記憶することが可能である。
そして、図27で説明した、パラレル昇圧モードにおける、直流電源B1,B2での電圧/電流制御のためのPWM制御において、デューティ比DT1,DT2に基づいて、上記式(19)および式(20)を用いてデューティ比DT11,DT12を設定するとともに、デューティ比DT21,DT22を設定する。また、第1のキャリア周期における位相差φ1=180度に設定するとともに、位相差マップおよび位相差算出式に従って、デューティ比DT1,DT2に基づいて位相差φ2を算出することができる。そして、1調整期間単位で、設定された位相差φ1,φ2を切換えてキャリア波CW1,CW2を発生させ、デューティ比DT11またはDT12とキャリア波CW1との比較に基づくPWM制御、およびデューティ比DT21またはDT22とキャリア波CW2との比較に基づくPWM制御を実行することにより、上述した、スイッチング素子S1〜S4でのスイッチング損失を低減した高効率の直流電力変換を実現することができる。
なお、図27〜図31では、デューティ比DT21,DT22を直流電源B2の出力制御のためのデューティ比DT2に設定し、デューティ比DT11,DT12を調整する場合を説明したが、デューティ比DT11,DT12を直流電源B1の出力制御のためのデューティ比DT1に設定し、デューティ比DT21,DT22を調整する場合、または、デューティ比DT11,DT12およびDT21,DT22をそれぞれ調整する場合においても、同様のデューティ比制御およびキャリア位相制御を実行できる。これらの場合におけるデューティ制御は、図8および図9で説明した実施の形態1でのデューティ比制御と同様である。
また、図28〜図31では、直流電源B1およびB2の両方が力行の状態を説明したが、その他の状態においても、同様のデューティ比制御およびキャリア位相制御が実行できる。
以上のように、本発明の実施の形態2によれば、実施の形態1と同様のデューティ比制御およびキャリア位相制御によって、直流電源B1,B2のデューティ比を調整するとともに、キャリア波CW1,CW2間の位相差φを調整することにより、電力変換器50のパラレル昇圧モードにおけるスイッチング損失が低減された高効率の直流電力変換を実現することができる。
なお、本実施の形態1および2では、電力変換器50,10の構成について、スイッチング素子S1〜S5とリアクトルL1,L2との接続関係を図示して説明したが、電力変換器50,10の構成要素がこれらの素子に限定されることを意味するものではない。すなわち、本実施の形態1,2において、構成要素同士が「電気的に接続される」との記載は、両要素間に他の回路要素やコネクタ端子が存在し、当該他の回路要素を経由して上記構成要素間に電気的な接続が確保されることを含むものとする。
また、本実施の形態1では、直流電源B1およびB2の両方が力行状態である場合、または、直流電源B1およびB2の両方が回生状態である場合には、リアクトル電流IL1およびIL2の一方の極大点と、他方の極小点とが同一タイミングとなるように、デューティ比制御およびキャリア位相制御を行なう構成について説明したが(図6および図10参照)、これらの場合において、リアクトル電流IL1およびIL2の極大点同士および極小点同士が同一タイミングとなるように、デューティ比制御およびキャリア位相制御を行なうことも可能である。
同様に、本実施の形態1では、直流電源B1およびB2の一方が力行状態であり、直流電源B1およびB2の他方が回生状態である場合には、リアクトル電流IL1およびIL2の極大点同士および極小点同士が同一タイミングとなるように、デューティ比制御およびキャリア位相制御を行なう構成について説明したが(図11および図12参照)、これらの場合において、リアクトル電流IL1およびIL2の一方の極大点と他方の極小点とが同一タイミングとなるように、デューティ比制御およびキャリア位相制御を行なうことも可能である。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。