JP6248997B2 - ハイブリッド自動車 - Google Patents
ハイブリッド自動車 Download PDFInfo
- Publication number
- JP6248997B2 JP6248997B2 JP2015177563A JP2015177563A JP6248997B2 JP 6248997 B2 JP6248997 B2 JP 6248997B2 JP 2015177563 A JP2015177563 A JP 2015177563A JP 2015177563 A JP2015177563 A JP 2015177563A JP 6248997 B2 JP6248997 B2 JP 6248997B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- water temperature
- control
- predetermined
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
- B60W20/16—Control strategies specially adapted for achieving a particular effect for reducing engine exhaust emissions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0676—Engine temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/12—Catalyst or filter state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0677—Engine power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/47—Engine emissions
- B60Y2300/474—Catalyst warm up
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/47—Engine emissions
- B60Y2300/476—Regeneration of particle filters
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Exhaust Gas After Treatment (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
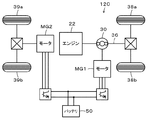
走行用のエンジンおよびモータと、
前記モータと電力をやりとりするバッテリと、
前記エンジンを間欠運転しながら走行用の要求出力によって走行するように前記エンジンと前記モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
前記制御手段は、
前記エンジンの運転開始時の冷却水温である開始時水温が第1所定温度よりも高い第2所定温度よりも高いときには、前記要求出力に応じた前記エンジンの目標出力が該エンジンから出力されるように前記エンジンを制御する通常制御を実行し、
前記開始時水温が前記第1所定温度以下のときには、前記エンジンの出力が第1所定出力以下に制限されて前記エンジンの排気浄化装置の触媒が暖機されるように前記エンジンを制御する第1制御を実行すると共に、その後に前記冷却水温が前記第1所定温度よりも高くなった或いは前記エンジンの運転開始から第1所定時間が経過したときに前記通常制御に移行し、
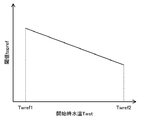
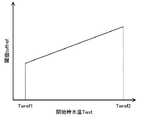
前記開始時水温が前記第1所定温度よりも高く且つ前記第2所定温度以下のときには、前記エンジンの出力が前記第1所定出力よりも大きい第2所定出力以下に制限されて前記エンジンからの粒子状物質の排出量が抑制されるように前記エンジンを制御する第2制御を実行すると共に、その後に前記冷却水温が前記第2所定温度よりも高くなった或いは前記エンジンの運転開始から第2所定時間が経過したときに前記通常制御に移行する、
ことを要旨とする。
・クランクシャフト26の回転位置を検出するクランクポジションセンサ140からのクランク角θcr
・エンジン22の冷却水の温度を検出する水温センサ142からの冷却水温Tw
・吸気バルブ128を開閉するインテークカムシャフトの回転位置や排気バルブを開閉するエキゾーストカムシャフトの回転位置を検出するカムポジションセンサ144からのカム角θci,θco
・スロットルバルブ124のポジションを検出するスロットルバルブポジションセンサ146からのスロットル開度TH
・吸気管に取り付けられたエアフローメータ148からの吸入空気量Qa
・吸気管に取り付けられた温度センサ149からの吸気温Ta
・吸気管内の圧力を検出する吸気圧センサ158からの吸気圧Pin
・空燃比センサ135aからの空燃比AF
・酸素センサ135bからの酸素信号O2
・シリンダブロックに取り付けられてノッキングの発生に伴って生じる振動を検出するノックセンサ159からのノック信号Ks
・スロットルバルブ124のポジションを調節するスロットルモータ136への駆動制御信号
・燃料噴射弁126への駆動制御信号
・イグナイタと一体化されたイグニッションコイル138への駆動制御信号
・モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの回転位置θm1,θm2
・モータMG1,MG2の各相に流れる電流を検出する電流センサからの相電流
・バッテリ50の端子間に設置された電圧センサ51aからの電池電圧Vb
・バッテリ50の出力端子に取り付けられた電流センサ51bからの電池電流Ib
・バッテリ50に取り付けられた温度センサ51cからの電池温度Tb
・イグニッションスイッチ80からのイグニッション信号
・シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP
・アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc
・ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP
・車速センサ88からの車速V
Claims (7)
- 走行用のエンジンおよびモータと、
前記モータと電力をやりとりするバッテリと、
前記エンジンを間欠運転しながら走行用の要求出力によって走行するように前記エンジンと前記モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
前記制御手段は、
前記エンジンの運転開始時の冷却水温である開始時水温が第1所定温度よりも高い第2所定温度よりも高いときには、前記要求出力に応じた前記エンジンの目標出力が該エンジンから出力されるように前記エンジンを制御する通常制御を実行し、
前記開始時水温が前記第1所定温度以下のときには、前記エンジンの出力が第1所定出力以下に制限されて前記エンジンの排気浄化装置の触媒が暖機されるように前記エンジンを制御する第1制御を実行すると共に、その後に前記冷却水温が前記第1所定温度よりも高くなった或いは前記エンジンの運転開始から第1所定時間が経過したときに前記通常制御に移行し、
前記開始時水温が前記第1所定温度よりも高く且つ前記第2所定温度以下のときには、前記エンジンの出力が前記第1所定出力よりも大きい第2所定出力以下に制限されて前記エンジンからの粒子状物質の排出量が抑制されるように前記エンジンを制御する第2制御を実行すると共に、その後に前記冷却水温が前記第2所定温度よりも高くなった或いは前記エンジンの運転開始から第2所定時間が経過したときに前記通常制御に移行する、
ハイブリッド自動車。 - 請求項1記載のハイブリッド自動車であって、
前記第2所定出力は、前記開始時水温が低いときに高いときよりも小さくなるように設定される、
ハイブリッド自動車。 - 請求項1または2記載のハイブリッド自動車であって、
前記第2所定時間は、前記開始時水温が低いときに高いときよりも長くなるように設定される、
ハイブリッド自動車。 - 請求項1ないし3のいずれか1つの請求項に記載のハイブリッド自動車であって、
前記制御手段は、前記開始時水温が前記第1所定温度よりも高く且つ前記第2所定温度以下のときにおいて、前記エンジンの前回の運転終了から今回の運転開始までの停止時間が第3所定時間以上のときには、前記第2制御を実行した後に前記通常制御に移行し、前記停止時間が前記第3所定時間未満のときには、前記第2制御を実行せずに前記通常制御を実行する、
ハイブリッド自動車。 - 請求項4記載のハイブリッド自動車であって、
前記第3所定時間は、前記開始時水温が低いときに高いときよりも短くなるように設定される、
ハイブリッド自動車。 - 請求項1ないし5のいずれか1つの請求項に記載のハイブリッド自動車であって、
前記制御手段は、前記第2制御の実行中に、前記冷却水温が前記第2所定温度よりも高くなっておらず且つ前記エンジンの運転開始から前記第2所定時間が経過していないときでも、前記エンジンの運転開始からの積算空気量が所定空気量以上に至ったときには、前記通常制御に移行する、
ハイブリッド自動車。 - 請求項6記載のハイブリッド自動車であって、
前記所定空気量は、前記開始時水温が低いときに高いときよりも多くなるように設定される、
ハイブリッド自動車。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015177563A JP6248997B2 (ja) | 2015-09-09 | 2015-09-09 | ハイブリッド自動車 |
| DE102016116644.8A DE102016116644B4 (de) | 2015-09-09 | 2016-09-06 | Hybridfahrzeug |
| CN201610806303.1A CN106515711B (zh) | 2015-09-09 | 2016-09-07 | 混合动力车辆 |
| US15/258,129 US9751524B2 (en) | 2015-09-09 | 2016-09-07 | Hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015177563A JP6248997B2 (ja) | 2015-09-09 | 2015-09-09 | ハイブリッド自動車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017052388A JP2017052388A (ja) | 2017-03-16 |
| JP6248997B2 true JP6248997B2 (ja) | 2017-12-20 |
Family
ID=58055195
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015177563A Active JP6248997B2 (ja) | 2015-09-09 | 2015-09-09 | ハイブリッド自動車 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9751524B2 (ja) |
| JP (1) | JP6248997B2 (ja) |
| CN (1) | CN106515711B (ja) |
| DE (1) | DE102016116644B4 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017218660A1 (de) | 2017-10-19 | 2019-04-25 | Robert Bosch Gmbh | Automatische Bremsvorrichtung für ein Fahrzeug und Verfahren zum automatischen Abbremsen eines Fahrzeugs |
| JP6992460B2 (ja) * | 2017-12-05 | 2022-01-13 | トヨタ自動車株式会社 | ハイブリッド自動車およびこれに搭載される制御装置 |
| US10908624B2 (en) * | 2018-11-09 | 2021-02-02 | Hamilton Sunstrand Corporation | Method for managing over-temperature excursions in a failed-fixed control system |
| JP7088088B2 (ja) * | 2019-03-14 | 2022-06-21 | トヨタ自動車株式会社 | ハイブリッド車両およびハイブリッド車両の制御方法 |
| CN112141071A (zh) * | 2019-06-10 | 2020-12-29 | 安徽华菱汽车有限公司 | 一种混合动力车辆起步控制方法及装置 |
| JP7238692B2 (ja) * | 2019-08-23 | 2023-03-14 | トヨタ自動車株式会社 | 電動車両のエンジン制御装置 |
| JP7167899B2 (ja) * | 2019-11-05 | 2022-11-09 | トヨタ自動車株式会社 | ハイブリッド車両およびハイブリッド車両の制御方法 |
| JP7552321B2 (ja) * | 2020-12-10 | 2024-09-18 | トヨタ自動車株式会社 | エンジン装置 |
| CN113847157B (zh) * | 2021-10-26 | 2023-09-01 | 浙江吉利控股集团有限公司 | 发动机控制方法、装置、车辆及存储介质 |
| JP7707868B2 (ja) * | 2021-11-08 | 2025-07-15 | トヨタ自動車株式会社 | エンジン装置 |
| JP2023082524A (ja) * | 2021-12-02 | 2023-06-14 | トヨタ自動車株式会社 | 車両 |
| JP7643312B2 (ja) * | 2021-12-06 | 2025-03-11 | トヨタ自動車株式会社 | 車両 |
| JP7683470B2 (ja) * | 2021-12-06 | 2025-05-27 | トヨタ自動車株式会社 | 車両 |
| JP7643393B2 (ja) * | 2022-05-18 | 2025-03-11 | トヨタ自動車株式会社 | ハイブリッド車両の駆動力制御装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3454174B2 (ja) * | 1998-12-22 | 2003-10-06 | トヨタ自動車株式会社 | ハイブリッド車輌の排気浄化装置 |
| JP2005320911A (ja) * | 2004-05-10 | 2005-11-17 | Toyota Motor Corp | 動力出力装置およびこれを搭載する自動車並びにその制御方法 |
| JP4222427B2 (ja) * | 2007-03-28 | 2009-02-12 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP5023957B2 (ja) * | 2007-10-17 | 2012-09-12 | トヨタ自動車株式会社 | ハイブリッド車およびその制御方法 |
| US8267837B2 (en) * | 2007-11-07 | 2012-09-18 | GM Global Technology Operations LLC | Method and apparatus to control engine temperature for a hybrid powertrain |
| JP5071213B2 (ja) * | 2008-04-11 | 2012-11-14 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP4983747B2 (ja) | 2008-08-21 | 2012-07-25 | トヨタ自動車株式会社 | 内燃機関 |
| JP2010222978A (ja) | 2009-03-19 | 2010-10-07 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2010241170A (ja) * | 2009-04-01 | 2010-10-28 | Toyota Motor Corp | 動力出力装置、それを備えたハイブリッド自動車および動力出力装置の制御方法 |
| JP2011169203A (ja) * | 2010-02-17 | 2011-09-01 | Hino Motors Ltd | ハイブリッド自動車の制御装置およびハイブリッド自動車 |
| JP5392421B2 (ja) * | 2010-12-22 | 2014-01-22 | トヨタ自動車株式会社 | 車両、車両の制御方法および車両の制御装置 |
| JP5716425B2 (ja) * | 2011-02-02 | 2015-05-13 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2012184688A (ja) * | 2011-03-04 | 2012-09-27 | Denso Corp | 内燃機関の触媒早期暖機制御装置 |
| JP2012219678A (ja) * | 2011-04-06 | 2012-11-12 | Toyota Motor Corp | 内燃機関システム |
| JP2012219746A (ja) * | 2011-04-11 | 2012-11-12 | Toyota Motor Corp | 内燃機関システム |
| JP5897885B2 (ja) * | 2011-11-25 | 2016-04-06 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2013133061A (ja) * | 2011-12-27 | 2013-07-08 | Toyota Motor Corp | ハイブリッド車 |
| US10384527B2 (en) * | 2013-02-08 | 2019-08-20 | Cummins Electrified Power Na Inc. | Four wheel drive powertrain configurations for two-motor, two-clutch hybrid electric vehicles |
| JP5983470B2 (ja) * | 2013-03-11 | 2016-08-31 | マツダ株式会社 | ハイブリッド車の制御装置 |
| JP2014234090A (ja) * | 2013-06-03 | 2014-12-15 | トヨタ自動車株式会社 | ハイブリッド自動車の制御装置 |
| JP5854023B2 (ja) * | 2013-10-04 | 2016-02-09 | トヨタ自動車株式会社 | ハイブリッド車両 |
| US9346451B2 (en) * | 2014-04-04 | 2016-05-24 | Ford Global Technologies, Llc | Method and system for engine control |
| JP2018000178A (ja) | 2016-06-27 | 2018-01-11 | 文子 岩澤 | ゴキブリ捕獲器 |
-
2015
- 2015-09-09 JP JP2015177563A patent/JP6248997B2/ja active Active
-
2016
- 2016-09-06 DE DE102016116644.8A patent/DE102016116644B4/de not_active Expired - Fee Related
- 2016-09-07 CN CN201610806303.1A patent/CN106515711B/zh not_active Expired - Fee Related
- 2016-09-07 US US15/258,129 patent/US9751524B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9751524B2 (en) | 2017-09-05 |
| CN106515711B (zh) | 2018-12-14 |
| US20170066435A1 (en) | 2017-03-09 |
| JP2017052388A (ja) | 2017-03-16 |
| DE102016116644B4 (de) | 2018-11-29 |
| CN106515711A (zh) | 2017-03-22 |
| DE102016116644A1 (de) | 2017-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6248997B2 (ja) | ハイブリッド自動車 | |
| JP5664621B2 (ja) | ハイブリッド車 | |
| CN111137273B (zh) | 混合动力汽车 | |
| CN107914702B (zh) | 混合动力汽车及混合动力汽车的控制方法 | |
| JP2018083570A (ja) | ハイブリッド自動車 | |
| JP6233328B2 (ja) | ハイブリッド自動車 | |
| JP2014073693A (ja) | ハイブリッド自動車 | |
| JP2018154142A (ja) | ハイブリッド自動車 | |
| CN103935356B (zh) | 混合动力车辆控制装置和混合动力车辆 | |
| JP2018127130A (ja) | ハイブリッド車 | |
| CN106121842B (zh) | 混合动力汽车 | |
| JP5991145B2 (ja) | ハイブリッド自動車 | |
| JP2019127108A (ja) | ハイブリッド自動車 | |
| JP6160645B2 (ja) | ハイブリッド自動車 | |
| JP6009978B2 (ja) | ハイブリッド自動車 | |
| JP2013067297A (ja) | ハイブリッド自動車 | |
| JP7073938B2 (ja) | ハイブリッド自動車 | |
| JP2018105197A (ja) | 内燃機関装置 | |
| JP2022137545A (ja) | ハイブリッド自動車 | |
| JP6277972B2 (ja) | ハイブリッド自動車 | |
| JP2022030701A (ja) | ハイブリッド車両用制御装置。 | |
| JP2016159878A (ja) | ハイブリッド自動車の制御装置 | |
| JP6020276B2 (ja) | ハイブリッド車 | |
| JP5040833B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP7226257B2 (ja) | 駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171024 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171106 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6248997 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |