JP6239619B2 - 位置決め及び相互動作用紐集合体を備えたフライングカメラ - Google Patents
位置決め及び相互動作用紐集合体を備えたフライングカメラ Download PDFInfo
- Publication number
- JP6239619B2 JP6239619B2 JP2015527001A JP2015527001A JP6239619B2 JP 6239619 B2 JP6239619 B2 JP 6239619B2 JP 2015527001 A JP2015527001 A JP 2015527001A JP 2015527001 A JP2015527001 A JP 2015527001A JP 6239619 B2 JP6239619 B2 JP 6239619B2
- Authority
- JP
- Japan
- Prior art keywords
- reference point
- string
- data
- flying
- attitude
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
- G03B15/006—Apparatus mounted on flying objects
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0016—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement characterised by the operator's input device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0033—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by having the operator tracking the vehicle either by direct line of sight or via one or more cameras located remotely from the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/005—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with signals other than visual, e.g. acoustic, haptic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0094—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots involving pointing a payload, e.g. camera, weapon, sensor, towards a fixed or moving target
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/08—Control of attitude, i.e. control of roll, pitch, or yaw
- G05D1/0808—Control of attitude, i.e. control of roll, pitch, or yaw specially adapted for aircraft
- G05D1/0866—Control of attitude, i.e. control of roll, pitch, or yaw specially adapted for aircraft specially adapted to captive aircraft
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/51—Housings
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Acoustics & Sound (AREA)
- Human Computer Interaction (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Physics (AREA)
- Computing Systems (AREA)
- Toys (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Accessories Of Cameras (AREA)
- Control Of Position Or Direction (AREA)
- Closed-Circuit Television Systems (AREA)
- Studio Devices (AREA)
Description
評価ユニットを用いて、前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを提供する工程と、
前記のデータを制御ユニットに提供して、この制御ユニットが、前記のデータ評価結果に基づき前記の少なくとも一つのアクチュエータの制御を実行するようにする工程と、
の追加工程を有することができる。
前記の機械構成部に加えられる機械的な力を検出する工程と、
前記の機械構成部に加えられる機械的な力を表すデータを評価ユニットに提供して、評価ユニットが、前記の機械構成部に加えられる機械的な力を表す前記のデータを用いて、前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを提供するようにする工程と、
を有することができる。
前記の機械構成部の特性に関する第一のデータを記憶する工程と、
前記の飛行体の特性に関する第二のデータを記憶する工程と、
前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表す前記のデータを提供するために、評価ユニットにおいて、これらの第一と第二のデータの中の少なくとも一つを用いて評価を実行する工程と、
を有することができる。
前記の機械構成部に加えられる機械的な力を検出する工程と、
評価結果を提供するために、この検出した機械的な力を評価する工程と、
この評価結果を制御ユニットに提供して、前記の少なくとも一つのアクチュエータを制御する工程が、この評価結果に基づき実行されるようにする工程と、
を有することができる。
この飛行体と動作可能に接続された制御ユニットと、
この飛行体をこの飛行体から離れた基準点と動作可能に接続する機械構成部と、
を備えており、この方法は、この機械構成部に加えられる力の方向、大きさ及び時間シーケンスの中の少なくとも一つに関するデータを制御ユニットで受信する工程を有し、この制御ユニットは、飛行体が所定の操作を実行するように飛行体を制御する工程を実施し、この所定の操作が、制御ユニットが受信したデータと関連する。好ましくは、この飛行体は、前述した形態による装置の飛行体である。
この飛行体と動作可能に接続された制御ユニットと、
この飛行体と動作可能に接続された評価ユニットと、
この飛行体をこの飛行体から離れた基準点と動作可能に接続する機械構成部と、
を備えており、この方法は、この機械構成部に加えられる力の方向と大きさの中の少なくとも一つに関するデータを評価ユニットで受信する工程を有し、この評価ユニットは、力の方向と大きさの中の少なくとも一つの特定のシーケンス又はパターンを計算により検出するように、このデータを前記のメモリユニットからのデータと組み合わせて評価する。
1.概略及び典型的な使用形態
図1は、以下で説明する本発明の典型的な使用方式の例を図示している。ユーザ108は、機械構成部(ここでは、単一の紐106から成る簡単な紐集合体)のユーザ終端部を保持している。この紐106は、典型的なヘリコプタ構造(上昇及び横方向の安定化用の斜板を備えた主回転翼と偏揺れ安定化用の小さい補助尾翼プロペラとを有する推進/安定化システム104)を用いて自身を上昇させて安定化させる飛行体(ここでは、フライングカメラ102)と接続されている。
2.位置決めと安定化
本発明は、それぞれ広域座標系114と基準点126に対して相対的なフライングカメラ102の姿勢及び位置を維持する問題をほぼ軽減、或いは解消する。明確化のために、以下の説明は、二次元(2D)の事例を考察する。しかし、本発明は、空間的な三次元(3D)に一般化でき、そこにおいて有用である。
az=Fp−Fscos(α−β)
紐がぴんと張られているので、紐方向の力は、次の式と等しくなければならない。

その後、閉ループ紐角度システムの所望の時間定数と所望の減衰比に対応して、所望のビークル角度β*に変換し、この角度は、次に、
3.ユーザ相互動作
紐106により加えられる力Fsを任意選択の力センサ124により直接測定するか、或いは推定することによって、評価ユニット304が、紐106に加えられる物理的な力によりフライングカメラ102とのユーザ相互動作を検出することが可能である。任意選択として、フライングカメラ102からユーザへの通信を可能とするために、フライングカメラ102の少なくとも一つのアクチュエータを制御することによってユーザ相互動作を可能とするように制御ユニット302を構成することができる。
4.更に別の実施例
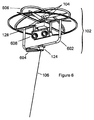
図6は、フライングカメラ102の別の実施例を図示している。図6の実施形態は、発進/回収に便利なハンドル602、素早い安全な発進を可能とする、このハンドルに取り付けられた安全スイッチ604、及び推進システム104を取り囲む軽いが頑丈なケージ606を含む様々な能動的及び受動的安全機能を備えている。
104 空気推進システム
106 紐
108 ユーザ
110 カメラ
112 本体座標系
114 広域座標系
116 α(アルファ)(フライングカメラに対するユーザの角度)
118 β(ベータ)(重力に対するフライングカメラの角度)
120 フライングカメラに作用する力
122 フライングカメラの重心
124 力センサ/紐取付点
126 基準点
128 飛行モジュール
202 慣性センサ
204 状態推定部
206 位置制御部
208 姿勢制御部
210 飛行アクチュエータ
212 ユーザコマンド検出部
214 カメラ制御部
216 メモリ
218 カメラアクチュエータ
302 制御ユニット
304 評価ユニット
306 検出ユニット
308 メモリユニット
402 自己検査実行
404 ユーザ放出
406 ホバリング
408 ユーザコマンド
410 着陸
412 着陸操作
500 ホバリング
502 横方向移動
504 上下移動
506 方向転換
508 写真撮影
602 ハンドル
604 安全スイッチ
606 保護ケージ
608 ステレオカメラ
Claims (14)
- 少なくとも一つのアクチュエータを有する飛行体と、
前記のアクチュエータを制御する制御ユニットと、
前記の飛行体を前記の飛行体から離れた移動可能な基準点と機械的かつ動作可能に接続する紐を有する機械構成部と、
飛行体の加速度を用いて紐の張力を求め、この求めた紐の張力と飛行体の加速度を用いて該移動可能な基準点に対して相対的な飛行体の上向き角度と飛行体の姿勢を決定する評価ユニットと、
備えた装置。 - 前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを前記の制御ユニットに提供するように動作可能な評価ユニットを備えており、前記の制御ユニットが、このデータに基づき前記の少なくとも一つのアクチュエータを制御するように構成されている請求項1に記載の装置。
- 前記の機械構成部に加えられる機械的な力を表すデータを前記の評価ユニットに提供するように動作可能な検出ユニットを備えており、前記の評価ユニットが、機械的な力を表す前記のデータを評価して、前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを提供するように構成されている請求項2に記載の装置。
- 検出ユニットと動作可能に接続された、飛行体の加速度、姿勢及び回転速度の中の少なくとも一つを表すデータを提供するセンサを備え、このセンサが、検出ユニットと動作可能に接続された、前記の機械的な力を計測する力センサを備えている請求項3に記載の装置。
- 前記の評価ユニットと動作可能に接続された、前記の機械構成部の特性に関する第一のデータと前記の飛行体の特性に関する第二のデータを保存するメモリユニットを備えており、前記の評価ユニットが、これらの第一と第二のデータの中の少なくとも一つを用いて評価を実行して、前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを提供するように構成されている請求項2から4まで
のいずれか一つに記載の装置。 - 能動的な安全手段及び/又は受動的な安全手段を更に備えている請求項1から5までのいずれか一つに記載の装置。
- 請求項1から6までのいずれか一つに記載の装置の動作方法であって、この方法が、
前記の飛行体を前記の移動可能な基準点から離れて飛行させるために前記の少なくとも一つのアクチュエータを制御する工程と、
飛行体の加速度を用いて紐の張力を求め、この求めた紐の張力と飛行体の加速度を用いて該移動可能な基準点に対して相対的な飛行体の上向き角度と飛行体の姿勢を決定するように評価ユニットを使用する工程と、
を有する方法。 - 飛行体とユーザの間の機械構成部を使用して、この機械構成部に機械的な力を加えてチャネルを介して通信する工程を更に有する請求項7に記載の方法。
- 飛行体が更にカメラを備え、本方法が、空撮する工程を更に有する請求項7又は8に記載の方法。
- 前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを提供するように評価ユニットを使用する工程と、
このデータを制御ユニットに提供して、前記の制御ユニットが、前記のデータの評価結果に基づく前記の少なくとも一つのアクチュエータの制御を実行するようにする工程と、を更に有する請求項7から9までのいずれか一つに記載の方法。 - 前記の機械構成部に加えられる機械的な力を検出する工程と、
前記の機械構成部に加えられる機械的な力を表すデータを評価ユニットに提供して、評価ユニットが、前記の機械構成部に加えられる機械的な力を表す前記のデータを使用して、前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表すデータを提供する工程を実行するようにする工程と、
を有する請求項10に記載の方法。 - 前記の機械構成部の特性に関する第一のデータを保存するとともに、前記の飛行体の特性に関する第二のデータを保存する工程と、
前記の基準点に対して相対的な前記の飛行体の(a)姿勢と(b)位置の中の少なくとも一つを表す前記のデータを提供するために、前記の第一と第二のデータの中の少なくとも一つを用いて評価ユニットで評価を実行する工程と、を更に有する請求項10又は11に記載の方法。 - 前記の機械構成部に加えられる機械的な力を検出する工程と、
評価結果を提供するために、検出した機械的な力を評価する工程と、
この評価結果を制御ユニットに提供して、前記の少なくとも一つのアクチュエータを制御する前記の工程が前記の評価結果に基づき実行されるようにする工程と、
を更に有する請求項7から12までのいずれか一つに記載の方法。 - 本方法は、前記の機械構成部に一つ以上の力を加えることにより前記の基準点と通信し、そのため、飛行体がこの一つ以上の力を機械構成部に加えるように、制御ユニットにより前記の一つ以上のアクチュエータを制御する工程を有する請求項7から13までのいずれか一つに記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261684292P | 2012-08-17 | 2012-08-17 | |
| US61/684,292 | 2012-08-17 | ||
| PCT/EP2013/067173 WO2014027097A2 (en) | 2012-08-17 | 2013-08-16 | Flying camera with string assembly for localization and interaction |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015531718A JP2015531718A (ja) | 2015-11-05 |
| JP2015531718A5 JP2015531718A5 (ja) | 2016-07-21 |
| JP6239619B2 true JP6239619B2 (ja) | 2017-11-29 |
Family
ID=49029088
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015527001A Active JP6239619B2 (ja) | 2012-08-17 | 2013-08-16 | 位置決め及び相互動作用紐集合体を備えたフライングカメラ |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US9753355B2 (ja) |
| EP (1) | EP2885676B1 (ja) |
| JP (1) | JP6239619B2 (ja) |
| CN (2) | CN109947122B (ja) |
| WO (1) | WO2014027097A2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101900950B1 (ko) | 2015-12-30 | 2018-09-21 | 대구대학교 산학협력단 | 쿼드콥터를 위한 단순구조 퍼지논리제어기 |
| US11312506B2 (en) * | 2019-03-21 | 2022-04-26 | Performance Drone Works Llc | Autonomous quadcopter piloting controller and debugger |
| US11409291B2 (en) | 2019-03-21 | 2022-08-09 | Performance Drone Works Llc | Modular autonomous drone |
| US11455336B2 (en) | 2019-03-21 | 2022-09-27 | Performance Drone Works Llc | Quadcopter hardware characterization and simulation |
| US11721235B2 (en) | 2019-03-21 | 2023-08-08 | Performance Drone Works Llc | Quadcopter sensor noise and camera noise recording and simulation |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6239619B2 (ja) | 2012-08-17 | 2017-11-29 | パースペクティヴ・ロボティクス・エイ・ジー | 位置決め及び相互動作用紐集合体を備えたフライングカメラ |
| US8922041B1 (en) * | 2012-10-03 | 2014-12-30 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Tethered vehicle control and tracking system |
| US9290269B2 (en) | 2013-03-15 | 2016-03-22 | CyPhy Works, Inc. | Spooler for unmanned aerial vehicle system |
| WO2015085483A1 (en) | 2013-12-10 | 2015-06-18 | SZ DJI Technology Co., Ltd. | Sensor fusion |
| EP3537104B1 (en) * | 2014-04-25 | 2021-06-02 | Sony Corporation | Information processing device, information processing method, and computer program |
| CN106030431B (zh) * | 2014-08-15 | 2017-11-03 | 深圳市大疆创新科技有限公司 | 传感器的自动标定系统及方法 |
| EP3399381A1 (en) | 2014-09-05 | 2018-11-07 | SZ DJI Technology Co., Ltd. | Context-based flight mode selection |
| CN114675671B (zh) | 2014-09-05 | 2025-10-21 | 深圳市大疆创新科技有限公司 | 多传感器环境地图构建 |
| CN105980950B (zh) * | 2014-09-05 | 2019-05-28 | 深圳市大疆创新科技有限公司 | 无人飞行器的速度控制 |
| WO2016059953A1 (ja) * | 2014-10-17 | 2016-04-21 | ソニー株式会社 | 電力供給システム |
| CZ305808B6 (cs) * | 2014-11-12 | 2016-03-23 | Výzkumný ústav meliorací a ochrany půdy, v.v.i. | Jednotka řízení letu upoutaných modelů bezpilotních dronů |
| CN106029501B (zh) | 2014-12-23 | 2019-05-14 | 深圳市大疆灵眸科技有限公司 | Uav全景成像 |
| WO2016103204A1 (en) | 2014-12-24 | 2016-06-30 | Verity Studios Ag | Flexibly supported movable platform |
| US10126745B2 (en) * | 2015-01-04 | 2018-11-13 | Hangzhou Zero Zero Technology Co., Ltd. | System and method for automated aerial system operation |
| US9836053B2 (en) | 2015-01-04 | 2017-12-05 | Zero Zero Robotics Inc. | System and method for automated aerial system operation |
| WO2016131127A1 (en) * | 2015-02-19 | 2016-08-25 | Aeryon Labs Inc. | Systems and processes for calibrating unmanned aerial vehicles |
| ES2549365B1 (es) * | 2015-05-26 | 2016-06-07 | Pablo MÁRQUEZ SERRANO | Soporte volador para cámaras |
| JP6557534B2 (ja) * | 2015-07-22 | 2019-08-07 | 鹿島建設株式会社 | 監視装置 |
| JP6213968B2 (ja) * | 2015-08-21 | 2017-10-18 | 株式会社エルム・スカイアクション | 撮影ユニット |
| WO2017038891A1 (ja) * | 2015-09-04 | 2017-03-09 | Necソリューションイノベータ株式会社 | 飛行制御装置、飛行制御方法、及びコンピュータ読み取り可能な記録媒体 |
| JP6602614B2 (ja) * | 2015-09-09 | 2019-11-06 | 公立大学法人会津大学 | ドローンおよびドローン群 |
| JP6103013B2 (ja) * | 2015-09-18 | 2017-03-29 | カシオ計算機株式会社 | 情報収集装置、情報収集方法 |
| CN106628134B (zh) * | 2015-10-28 | 2019-11-05 | 顾晓伟 | 一种旋翼飞行装置及其控制方法 |
| EP3165945B1 (de) * | 2015-11-03 | 2024-01-03 | Leica Geosystems AG | Oberflächenvermessungsgerät zur bestimmung von 3d-koordinaten einer oberfläche |
| CN105416589B (zh) * | 2015-11-26 | 2017-05-24 | 中国计量学院 | 用于四旋翼无人机的绳牵式控制装置和控制方法 |
| CN105391988A (zh) * | 2015-12-11 | 2016-03-09 | 谭圆圆 | 多视角的无人飞行器及其多视角显示方法 |
| WO2017151356A1 (en) * | 2016-03-02 | 2017-09-08 | Wal-Mart Stores, Inc. | Unmanned aircraft systems with a customer interface system and methods of delivery utilizing unmanned aircraft systems |
| JP6642166B2 (ja) * | 2016-03-22 | 2020-02-05 | 富士通株式会社 | 飛翔機及び飛翔機の使用方法 |
| US10435144B2 (en) | 2016-04-24 | 2019-10-08 | Hangzhou Zero Zero Technology Co., Ltd. | Aerial system propulsion assembly and method of use |
| DE102016206982B4 (de) | 2016-04-25 | 2022-02-10 | Siemens Aktiengesellschaft | Flugmobil zum Scannen eines Objekts und System zur Schadensanalyse des Objekts |
| JP2017217942A (ja) * | 2016-06-03 | 2017-12-14 | 株式会社衛星ネットワーク | 無人機システム、無人機、係留装置 |
| WO2018020671A1 (ja) * | 2016-07-29 | 2018-02-01 | 株式会社ソニー・インタラクティブエンタテインメント | 無人飛行体および無人飛行体の飛行制御方法 |
| US10364030B2 (en) * | 2016-09-09 | 2019-07-30 | Wing Aviation Llc | Methods and systems for user interaction and feedback via control of tether |
| US10560666B2 (en) * | 2017-01-21 | 2020-02-11 | Microsoft Technology Licensing, Llc | Low-cost, long-term aerial imagery |
| JP6642486B2 (ja) * | 2017-03-01 | 2020-02-05 | カシオ計算機株式会社 | 飛行装置、飛行装置の制御方法、及びプログラム |
| US10457382B2 (en) * | 2017-04-13 | 2019-10-29 | The Boeing Company | System and method for providing dynamic tactile feedback to a vehicle operator |
| CN107087042A (zh) * | 2017-04-21 | 2017-08-22 | 天津卉茗共创科技有限公司 | 摄像机构、终端以及摄像系统 |
| US10640233B2 (en) * | 2017-04-27 | 2020-05-05 | Ralph Irad Miller | Systems, methods, and devices improving safety and functionality of craft having one or more rotors |
| US20180348760A1 (en) * | 2017-05-31 | 2018-12-06 | James Peverill | Automatic Change Detection System |
| US10707572B2 (en) * | 2017-07-10 | 2020-07-07 | Autel Robotics Co., Ltd. | Antenna and unmanned aerial vehicle |
| CN108313286B (zh) * | 2017-12-20 | 2021-03-09 | 易瓦特科技股份公司 | 基于无人机悬挂软梯的方法、系统及装置 |
| CN108298080B (zh) * | 2017-12-20 | 2021-08-10 | 易瓦特科技股份公司 | 基于地面站在目标线缆上悬挂软梯的方法、系统及装置 |
| US10386703B1 (en) * | 2018-04-03 | 2019-08-20 | Chandler Evans | Systems and methods for orbiting imaging |
| CN110673178B (zh) * | 2018-07-03 | 2022-03-04 | 中移物联网有限公司 | 卫星导航定位的自检方法、装置、设备、存储介质 |
| JP7119782B2 (ja) * | 2018-08-30 | 2022-08-17 | 株式会社Ihi | 飛行体 |
| US11691761B2 (en) * | 2019-05-17 | 2023-07-04 | FlyFocus Sp. z.o.o. | Detachable power cable for unmanned aerial vehicle |
| JP7251414B2 (ja) * | 2019-09-02 | 2023-04-04 | 富士通株式会社 | 制御装置および制御方法 |
| KR102732956B1 (ko) * | 2019-09-06 | 2024-11-22 | 삼성전자주식회사 | 멀티 센서 기반의 무인 비행체 및 그 제어 방법 |
| WO2021090352A1 (ja) * | 2019-11-05 | 2021-05-14 | 楽天株式会社 | 航空機の飛行制御を行う制御装置、及び制御方法 |
| JP6750722B2 (ja) * | 2019-12-26 | 2020-09-02 | 富士通株式会社 | 飛翔機及び飛翔機の使用方法 |
| EP4110694B1 (en) * | 2020-02-24 | 2025-01-15 | Arrowtec GmbH | Tethered unmanned aerial vehicle system |
| CN111232205B (zh) * | 2020-03-18 | 2020-12-11 | 江苏润翔软件技术有限公司 | 一种野外用通讯信号接收飞行器 |
| US11220335B1 (en) * | 2020-08-03 | 2022-01-11 | Easy Aerial Inc. | Hybrid unmanned aerial vehicle systems with quick release tether assembly |
| JP2021028722A (ja) * | 2020-10-28 | 2021-02-25 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 制御装置、無人航空機、制御方法、及びプログラム |
| JP7352314B1 (ja) | 2022-10-28 | 2023-09-28 | 株式会社空撮技研 | 自立できるロッド装置 |
| DE102024122633A1 (de) * | 2024-08-08 | 2026-02-12 | Endress+Hauser Group Services Ag | Kontinuierliche Überwachung von Ausstoß von Gasemissionen mittels einer Vorrichtung umfassend ein Windangriffselement und mindestens einen an die Vorrichtung gekoppelten Sensor |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3149803A (en) * | 1961-07-19 | 1964-09-22 | Us Industries Inc | Tethered hovering platform |
| US3223358A (en) * | 1964-03-18 | 1965-12-14 | Fairchild Hiller Corp | Tethered helicopter |
| FR2685283A1 (fr) | 1991-12-23 | 1993-06-25 | Intertechnique Sa | Engin volant sans pilote et installation le mettant en óoeuvre. |
| JP2001120848A (ja) * | 1999-10-25 | 2001-05-08 | Heikon Ryu | ラジコン模型飛行物の安全装置およびラジコン模型飛行物 |
| JP3949447B2 (ja) * | 2001-12-25 | 2007-07-25 | 三菱電機株式会社 | エレベータの主索振れ抑制装置 |
| JP2004232461A (ja) * | 2003-01-28 | 2004-08-19 | 正人 ▲たか▼岡 | 発電装置 |
| JP2006027888A (ja) * | 2004-07-21 | 2006-02-02 | Hitachi Building Systems Co Ltd | エレベーターの主ロープ診断装置 |
| JP4026632B2 (ja) | 2004-08-12 | 2007-12-26 | セイコーエプソン株式会社 | 小型飛行体 |
| US7494320B2 (en) | 2005-06-28 | 2009-02-24 | Petter Muren | Rotor for passively stable helicopter |
| US7631834B1 (en) * | 2006-02-24 | 2009-12-15 | Stealth Robotics, Llc | Aerial robot with dispensable conductive filament |
| WO2008048260A1 (en) * | 2006-10-18 | 2008-04-24 | Yutaka Kanayama | Human-guided mapping method for mobile robot |
| CN101033973B (zh) * | 2007-04-10 | 2010-05-19 | 南京航空航天大学 | 微小型飞行器微惯性组合导航系统的姿态确定方法 |
| CN101726295B (zh) * | 2008-10-24 | 2011-09-07 | 中国科学院自动化研究所 | 考虑加速度补偿和基于无迹卡尔曼滤波的惯性位姿跟踪方法 |
| FR2937948B1 (fr) * | 2008-10-30 | 2010-12-03 | Flying Robots | Procede de decollage automatique d'un aeronef a voilure souple, voile, et aeronef |
| US8777157B2 (en) * | 2008-10-31 | 2014-07-15 | University Of Kansas | Tethered hovering platform |
| WO2010092253A1 (fr) * | 2009-02-12 | 2010-08-19 | Geocean | Ameliorations aux aerodynes captifs |
| US8453966B2 (en) * | 2009-02-12 | 2013-06-04 | Aerovel Corporation | Method and apparatus for automated launch, retrieval, and servicing of a hovering aircraft |
| WO2010105638A1 (en) * | 2009-03-17 | 2010-09-23 | MAX-PLANCK-Gesellschaft zur Förderung der Wissenschaften e.V. | Teleoperation method and human robot interface for remote control of a machine by a human operator |
| US8590829B2 (en) * | 2009-04-06 | 2013-11-26 | Sky Sapience Ltd. | System, floating unit and method for elevating payloads |
| US20110127775A1 (en) * | 2009-05-20 | 2011-06-02 | Bevirt Joeben | Airborne Power Generation System With Modular Structural Elements |
| US20100295303A1 (en) * | 2009-05-21 | 2010-11-25 | Makani Power, Inc. | Tethered system for power generation |
| US8894001B2 (en) * | 2009-06-03 | 2014-11-25 | Grant Calverley | Gyroglider power-generation, control apparatus and method |
| CN101707334B (zh) * | 2009-11-24 | 2011-09-28 | 龚文基 | 无人直升机电力展放引导绳的展放方法及系统 |
| CN101789569B (zh) * | 2010-03-19 | 2012-10-10 | 江苏省送变电公司 | 遥控无人直升机展放初级导引绳的施工方法 |
| US9352832B2 (en) * | 2010-03-24 | 2016-05-31 | Google Inc. | Bridles for stability of a powered kite and a system and method for use of same |
| US8602349B2 (en) * | 2010-06-23 | 2013-12-10 | Dimitri Petrov | Airborne, tethered, remotely stabilized surveillance platform |
| US8646719B2 (en) * | 2010-08-23 | 2014-02-11 | Heliplane, Llc | Marine vessel-towable aerovehicle system with automated tow line release |
| EP2635491A4 (en) * | 2010-11-03 | 2015-09-16 | Makani Power Inc | FLIGHT CONFIGURATION AND FLIGHT STRATEGY FOR WIND SPEEDS FOR FLIGHT |
| WO2012063220A2 (en) * | 2010-11-12 | 2012-05-18 | Sky Sapience | Aerial unit and method for elevating payloads |
| CN102180270B (zh) * | 2011-03-10 | 2013-08-14 | 北京航空航天大学 | 一种微小型旋翼飞行器实验平台及应用 |
| US8738198B2 (en) * | 2011-05-26 | 2014-05-27 | Foster-Miller, Inc. | Robot surveillance system and method |
| WO2013052178A2 (en) * | 2011-06-09 | 2013-04-11 | Lasermotive, Inc. | An aerial platform system, and related methods |
| US20130233964A1 (en) * | 2012-03-07 | 2013-09-12 | Aurora Flight Sciences Corporation | Tethered aerial system for data gathering |
| ITTO20120299A1 (it) * | 2012-04-05 | 2013-10-06 | Oto Melara Spa | Dispositivo e metodo per il controllo automatico di un dispositivo ad argano e veicolo su cui tale dispositivo e' applicato. |
| US9102405B2 (en) * | 2012-07-18 | 2015-08-11 | Princetel Inc. | Cable-tethered helicopter surveillance system |
| JP6239619B2 (ja) | 2012-08-17 | 2017-11-29 | パースペクティヴ・ロボティクス・エイ・ジー | 位置決め及び相互動作用紐集合体を備えたフライングカメラ |
| US8922041B1 (en) * | 2012-10-03 | 2014-12-30 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Tethered vehicle control and tracking system |
| US8931144B2 (en) * | 2013-03-14 | 2015-01-13 | State Farm Mutual Automobile Insurance Company | Tethering system and method for remote device |
| US9290269B2 (en) * | 2013-03-15 | 2016-03-22 | CyPhy Works, Inc. | Spooler for unmanned aerial vehicle system |
| US8948928B2 (en) * | 2013-04-19 | 2015-02-03 | Sikorsky Aircraft Corporation | Sustained over-the-horizon vertical takeoff and landing sensing system |
| US9205921B1 (en) * | 2013-12-19 | 2015-12-08 | Google Inc. | Methods and systems for conserving power during hover flight |
| US9389132B1 (en) * | 2013-12-26 | 2016-07-12 | Google Inc. | Methods and systems for estimating an orientation of a tethered aerial vehicle relative to wind |
| US9643721B2 (en) * | 2014-03-10 | 2017-05-09 | David Brian Schaefer | Wind energy conversion systems, devices, and methods |
| US9446858B2 (en) * | 2014-09-18 | 2016-09-20 | Kevin Hess | Apparatus and methods for tethered aerial platform and system |
| US20160318607A1 (en) * | 2015-04-29 | 2016-11-03 | Pinakin Desai | Tethered drone assembly |
| CN108052117A (zh) * | 2017-12-12 | 2018-05-18 | 天津大学 | 基于部分反馈线性化四旋翼无人机吊挂飞行控制方法 |
-
2013
- 2013-08-16 JP JP2015527001A patent/JP6239619B2/ja active Active
- 2013-08-16 CN CN201910114620.0A patent/CN109947122B/zh active Active
- 2013-08-16 WO PCT/EP2013/067173 patent/WO2014027097A2/en not_active Ceased
- 2013-08-16 EP EP13752620.8A patent/EP2885676B1/en active Active
- 2013-08-16 US US14/421,747 patent/US9753355B2/en active Active
- 2013-08-16 CN CN201380044058.XA patent/CN104769496B/zh active Active
-
2017
- 2017-09-05 US US15/695,295 patent/US10168601B2/en active Active
-
2018
- 2018-12-26 US US16/232,604 patent/US10571779B2/en active Active
-
2020
- 2020-02-18 US US16/793,570 patent/US11042074B2/en active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101900950B1 (ko) | 2015-12-30 | 2018-09-21 | 대구대학교 산학협력단 | 쿼드콥터를 위한 단순구조 퍼지논리제어기 |
| US11312506B2 (en) * | 2019-03-21 | 2022-04-26 | Performance Drone Works Llc | Autonomous quadcopter piloting controller and debugger |
| US11409291B2 (en) | 2019-03-21 | 2022-08-09 | Performance Drone Works Llc | Modular autonomous drone |
| US11455336B2 (en) | 2019-03-21 | 2022-09-27 | Performance Drone Works Llc | Quadcopter hardware characterization and simulation |
| US11721235B2 (en) | 2019-03-21 | 2023-08-08 | Performance Drone Works Llc | Quadcopter sensor noise and camera noise recording and simulation |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200241389A1 (en) | 2020-07-30 |
| JP2015531718A (ja) | 2015-11-05 |
| CN104769496B (zh) | 2019-03-15 |
| US10168601B2 (en) | 2019-01-01 |
| US20180149948A1 (en) | 2018-05-31 |
| US9753355B2 (en) | 2017-09-05 |
| CN104769496A (zh) | 2015-07-08 |
| US20150212391A1 (en) | 2015-07-30 |
| EP2885676A2 (en) | 2015-06-24 |
| US20190243212A1 (en) | 2019-08-08 |
| CN109947122B (zh) | 2022-04-12 |
| US10571779B2 (en) | 2020-02-25 |
| US11042074B2 (en) | 2021-06-22 |
| WO2014027097A2 (en) | 2014-02-20 |
| CN109947122A (zh) | 2019-06-28 |
| WO2014027097A3 (en) | 2014-07-31 |
| EP2885676B1 (en) | 2020-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6239619B2 (ja) | 位置決め及び相互動作用紐集合体を備えたフライングカメラ | |
| CN106200681B (zh) | 可移动物体的起飞辅助的方法以及系统 | |
| CN112638770B (zh) | 安全的无人航空器 | |
| AU2023308867A1 (en) | Machine-learned monocular depth estimation and semantic segmentation for 6-dof absolute localization of a delivery drone | |
| US12209884B2 (en) | Using unwound tether length to measure altitude | |
| US12409933B2 (en) | Backend automation system for simulation of drone deliveries through virtual fleets | |
| AU2022203829B2 (en) | Stereo abort of unmanned aerial vehicle deliveries | |
| US11661177B2 (en) | Fold-out propeller tip extensions | |
| US12387483B2 (en) | Systems, methods, and apparatus for testing UAV devices | |
| US12164308B2 (en) | Tether-based wind estimation | |
| HK40010657B (en) | Equipment for controlling flight and operation method thereof | |
| HK40010657A (en) | Equipment for controlling flight and operation method thereof | |
| CN113138603A (zh) | 系绳管理系统和方法 | |
| US20250328449A1 (en) | Flight Software Testing Using Actual Flight Data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160531 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170329 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170530 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20170530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170912 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171012 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171101 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6239619 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |