<リールの全体構成>
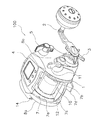
図1及び図2において、本発明の一実施形態を採用した電動リール100は、外部電源から供給された電力によりモータ駆動される大型のリールである。また、電動リール100は糸繰り出し長さ又は糸巻取長さに応じて仕掛けの水深を表示する水深表示機能を有するリールである。
電動リール100は、釣り竿に装着可能なリール本体1と、リール本体1の側方に配置されたスプール10の回転用のハンドル2と、ハンドル2のリール本体1側に配置されたドラグ調整用のスタードラグ3と、水深表示用のカウンタケース4と、を主に備える。
リール本体1は、フレーム7と、フレーム7の左右を覆う第1側カバー8a及び第2側カバー8bと、を有する。フレーム7は、例えば、例えばアルミニウム合金等の軽金属製又はガラス繊維で強化されたポリアミド樹脂製であり、第1側板7a及びハンドル2側の第2側板7bと、それらを下部、後部及び前上部の3箇所で連結する複数の連結部材7cと、を有する。第2側板7bは、側板本体9aと、側板本体9aにねじ止めされた機構装着板9bと、を有する。機構装着板9bは、アルミニウム合金などの軽金属製である。
図2に示すように、リール本体1の内部には、スプール10に連動して動作するレベルワインド機構13(図3)、並びハンドル2及びモータ12の回転をスプール10に伝達する回転伝達機構6が設けられている。
また、リール本体1の内部には、モータ12及びハンドル2に連結された糸巻用のスプール10が設けられる。スプール10は、リール本体1に回転自在に支持される。スプール10の内部に、スプール10を糸巻取方向に回転駆動するモータ12が配置される。
図1に示すように、第2側カバー8bの中央下部には、ハンドル2が回転自在に支持される。また、ハンドル2の支持部分の上方前部には、モータ12の出力を複数段階(例えば31段階)に調整するための調整レバー5が揺動自在に支持される。調整レバー5は、スプール10の回転速度(又はスプール10に釣り糸を介して作用する回転負荷)を複数段階のいずれかに設定するために設けられる。また、調整レバー5は、釣り糸に作用する張力を複数段階のいずれかに設定する張力設定部としても機能する。調整レバー5の後方には、レバー形状のクラッチ操作部材11が揺動自在に配置される。クラッチ操作部材11は、ハンドル2及びモータ12とスプール10との駆動伝達をオンオフするクラッチ機構(図示せず)をオンオフ操作するための部材である。このクラッチをオンすると、仕掛けの自重による糸繰り出し中に、糸繰り出し動作を停止できる。ハンドル2と逆側の第1側カバー8aには、電源ケーブル接続用のケーブルコネクタ14が下向きに装着される。下部の連結部材7cには、電動リール100を釣り竿に装着するための竿装着脚部7dが形成される。
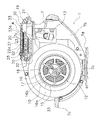
回転伝達機構6は、図2に示すように、先端部にハンドル2が一体回転可能に連結される駆動軸38と、駆動軸38に回転自在に装着される駆動ギア39と、駆動ギア39にかみ合うピニオンギア40と、を有する。駆動軸38は、ローラ式のワンウェイクラッチ42a及び爪式のワンウェイクラッチ42bによって、糸繰り出し方向の回転が禁止される。爪式のワンウェイクラッチ42bは、駆動軸38に一体回転可能に連結されたラチェットホイール42cとラチェットホイール42cの糸繰り出し方向の回転を禁止するストッパ爪(図示せず)とを有する。ストッパ爪は、機構装着板9bに揺動自在に支持される。ラチェットホイール42cは、後述するドラグ機構44も構成する。駆動軸38は、第1側カバー8aと機構装着板9bとに回転自在に支持される。機構装着板9bには、駆動軸38を支持するための軸受31が装着されるボス部9cが設けられる。
また、回転伝達機構6は、モータ12の回転を減速してスプール10に伝達する遊星歯車機構43を有する。回転伝達機構6の回転伝達経路の途中には、スプール10の糸繰り出し方向の回転を制動するドラグ機構44が設けられている。
ドラグ機構44は、スタードラグ3によってドラグ力が調整される。スタードラグ3は、駆動軸38の先端に螺合するナット部3aを有し、ナット部3aがドラグ機構44を押圧することによってドラグ力が調整される。ドラグ機構44は、駆動軸38に一体回転可能に連結される少なくとも1枚(この実施形形態では、3枚)の第1ドラグ板45aと、駆動ギア39に一体回転可能に連結される少なくとも1枚(この実施形形態では、2枚)の第2ドラグ板45bと、第1ドラグ板45aと第2ドラグ板45bとの間に配置される少なくとも1枚(この実施形態では5枚)のドラグディスク45cと、を有する。また、ドラグ機構44は、駆動軸38に一体回転可能に連結される第1ドラグ板として機能する前述したラチェットホイール42cを有する。最もハンドル2側の第1ドラグ板45aは、複数枚の皿バネ48及びワンウェイクラッチ42aの内輪42dを介してナット部3aによって押圧される。皿バネ48を介した押圧力は、ラチェットホイール42cを介して駆動軸38に設けられた鍔部38aによって受けられる。したがって、釣り糸にスタードラグ3によって調整されたドラグ力を超える力が作用すると、ドラグ機構44が作動する。ドラグ機構44が作動すると、駆動ギア39及び駆動ギア39に一体回転可能に連結された第2ドラグ板45bがラチェットホイール42c及び第1ドラグ板45aに対して滑って糸繰り出し方向に回転する。この結果、駆動ギア39及び第2ドラグ板45bと、ラチェットホイール42c及び第1ドラグ板45aとの間に摩擦による熱が発生する。この発生した熱によるドラグ機構44の温度は、駆動軸38の基端が支持されるボス部9cに設けられた温度センサ29によって計測される。温度センサ29は、例えば、サーミスタ又は熱電対等のセンサを用いており、温度計測部の一例である。
<モータの構成>
モータ12は、例えば、定格出力が120ワット程度のブラシレスモータであり、電動リール100に用いるものとしては比較的大容量のものである。
モータ12は、図3及び図5に示すように、モータケース15と、モータケース15の内周面に設けられた固定子16と、固定子16の内周側に配置された回転子17と、回転子が固定された回転軸18と、を有する。モータケース15は、耐食性を高めるためにアルマイト処理されたアルミニウム合金製の部材である。モータケース15は、筒部15aと筒部の一端(図5右端)にねじ込み固定された底部15bと、を有する有底筒状の部材である。モータケース15の開口は、モータホルダ24によって塞がれる。モータホルダ24は、第1側板7aにねじ止めされる。モータケース15の筒部15aの開口端は、モータホルダ24に芯出された状態でねじ込み固定される。これよりモータ12がリール本体1に固定される。
固定子16は、モータケース15に固定された複数(例えば3個)の積層コア16aと、積層コア16aに巻回された、U相、V相及びW相の3つのコイル16bと、を有する。積層コア16aは、例えば無方向性珪素鋼板製である。積層コア16aは、モータケース15の内周面に位置決めされて固定される。固定子16は、露出部分がメッキ等の防食被膜により防食処理される。
回転子17は、S極及びN極を有する2極の磁石17aと、磁石17aを保持する磁石ホルダ17bとを含んでいる。磁石ホルダ17bは、回転軸18に一体回転可能に連結される。回転子17は、露出部分がメッキ等の防食被膜により防食処理される。
回転軸18は、例えば、ステンレス合金製の軸であり、モータホルダ24及びモータケース15の底部15bに左右一対の軸受27により回転自在に支持される。回転軸18の第1端(図5左端)には、回転軸18の糸繰り出し方向の回転を禁止するためのワンウェイクラッチ28が装着される。ワンウェイクラッチ28は、モータホルダ24に形成された膨出部24a内に外輪28aが回転不能に装着されたローラクラッチである。
<遊星歯車機構の構成>
回転軸18の第2端(図5右端)には、回転伝達機構6を構成する遊星歯車機構43が固定される。遊星歯車機構43は、第1遊星機構71と、第2遊星機構72と、を有する。第1遊星機構71は、第1太陽ギア71aと、第1リングギア71bと、複数(例えば、2つから4つ)の第1遊星ギア71cと、第1キャリア71dと、を有する。第1太陽ギア71aは、モータ12の回転軸18に設けられ、回転軸18と一体回転する。第1リングギア71bは、スプール10の内周面に一体又は別体で設けられる。この実施形態では、第1リングギア71bは、スプール10の内周面に一体で設けられる。複数の第1遊星ギア71cは、第1太陽ギア71aと第1リングギア71bとに係合する。この実施形態では、第1遊星ギア71cは、3つ設けられる。第1キャリア71dは、複数の第1遊星ギア71cをそれぞれ回転自在に保持し、モータ12の回転軸18に対して回転可能に設けられる。
第2遊星機構72は、第2太陽ギア72aと、第2リングギア72bと、複数(例えば、2つから4つ)の第2遊星ギア72cと、第2キャリア72dと、を有する。第2太陽ギア72aは、第1キャリア71dに一体回転可能に連結され、第1キャリア71dとともに回転する。第2リングギア72bは、スプール10の内周面に一体又は別体で設けられる。この実施形態では、第2リングギア72bは、第1リングギア71bと軸方向に並べてスプール10の内周面に一体で設けられる。複数の第2遊星ギア72cは、第2太陽ギア72aと第2リングギア72bとに係合する。この実施形態では、第2遊星ギア72cは、3つ設けられる。第2キャリア72dは、複数の第2遊星ギア72cをそれぞれ回転自在に保持し、モータ12の回転軸18に対して回転可能に設けられる。第2キャリア72dには、ピニオンギア40が一体回転可能かつ軸方向移動自在に連結される。ピニオンギア40は、クラッチ操作部材11の操作により動作する図示しないクラッチ制御機構によって、第2キャリア72dに一体回転可能に係合するクラッチオン位置と、第2キャリア72dから離脱するクラッチオフ位置とに移動する。ピニオンギア40がクラッチオン位置にあるとき、第2キャリア72dは、ピニオンギア40及び駆動ギア39を介してドラグ機構44に接続される。
スプール10には遊星歯車機構43を介してモータ12の回転が伝達される。遊星歯車機構43は、例えば1/500の減速比Rでモータ12の回転を減速する。
リール本体1の第1側板7a及び第2側板7bの上部に、図1及び図2に示すように、釣り糸の先に装着された仕掛けの水深を表示するカウンタケース4が固定される。
<カウンタケース構成>
カウンタケース4は、図3及び図4に示すように、リール本体1の前上部に載置されたケース本体19と、水深表示部22と、リール制御部23と、を備える。リール制御部23は、電動リール100の制御部の一例である。電動リール100の制御システム90は、図6に示すように、温度センサ29と、リール制御部23と、を有する。制御システム90は、電動リール100の制御装置の一例である。
図3及び図4に示すように、ケース本体19は、リール本体1の第1側板7a及び第2側板7bに固定される。ケース本体19は、上面部33を有し、外部に露出する合成樹脂製の上ケース部材30と、上ケース部材30に固定される下ケース部材32と、を有する。
上ケース部材30は、例えば、ガラス短繊維で強化されたポリアミド樹脂製である。上ケース部材30は、表示部分が前細りに形成される。上ケース部材30は、内部に下ケース部材32とで収納空間を有する。
上面部33の表示部分には、概ね台形形状の表示用に開口する表示枠33aが形成される。表示枠33aの開口は、上ケース部材30に溶着された透明カバー37により塞がれている。
また、図4に示すように、表示枠33aの後方には、メニュースイッチSW1、決定スイッチSW2、及びメモスイッチSW3が配置される。メニュースイッチSW1は、例えば、選択操作を行うためのメニュー操作用のスイッチである。決定スイッチSW2は、例えば、メニュースイッチSWで選択された操作を決定するためのスイッチである。メモスイッチSW3は、例えば、棚メモ用のスイッチである。メニュースイッチSW1は、水深表示部22内の表示項目を選択するために使用されるボタンである。例えば、メニュースイッチSW1を操作するごとに上からモード(仕掛けの水深を水面からの深さで表示するモード)と底からモード(仕掛けの水深を水底からの水深で表示するモード)とに切り換える。またメニュースイッチSW1を3秒以上長押しすると、長押しの都度、モータ12の制御モードを速度一定モードと張力一定モードとに切り換えできる。
ここで、速度一定モードは、調整レバー5の揺動位置に応じてスプール10の回転速度の上限速度を複数段階(例えば31段階)に多段速度制御可能なモードである。張力一定モードは、調整レバー5の揺動位置に応じて釣り糸に作用する張力(スプールの回転負荷)の上限張力を複数段階(例えば31段階)に多段張力制御可能なモードである。なお、両モードとも、最高段階の31段階は、100%デューティでモータ12を動作させる速巻速度であり、電流制限は行うが、速度制御は行わない。なお、速度一定モードにおいて、第1段階のスプール回転速度は、28rpm(rpm=1分間の回転速度)から30rpmの範囲に制御される。したがって、モータ12の回転速度は、1400rpmから1500rpmの範囲に制御される。
図3に示すように、下ケース部材32は、例えば、アルミニウム合金及びマグネシウム合金等の軽量で熱伝導率が高い金属製の枠状の部材である。下ケース部材32は、複数本(例えば4本)の固定ねじ(図示せず)により上ケース部材30を固定する。水深表示部22及びリール制御部23用の2枚の回路基板20が下ケース部材32に搭載される。
下側の回路基板20の下面には、モータ12駆動用の複数のFET(電界効果トランジスタ)25を含むモータ駆動回路70が搭載される。FET25は、モータ12をPWM(パルス幅変調)する際にデューティ比に応じてスイッチングするスイッチ素子として機能する。また、FET25は、例えば、モータ12の固定子16のコイル16bを順に励磁及び消磁するためのスイッチ素子として機能する。また、下側の回路基板20に、コンデンサ21が接続される。コンデンサ21は、FET25から発生するノイズを平滑化する機能を有する。また、モータ12の逆起電流を整流する機能を有する。この逆起電流を整流することにより、モータ12の回転位相を検出する。この検出された回転位相によりFET25が制御されてコイル16bを順に励磁及び消磁し、モータ12を回転させる。また、この回転位相によりモータ12の回転速度を検出する。
図3及び図4に示すように、水深表示部22は、例えば、セグメント表示するバックライト付きの液晶表示装置22aを有する。液晶表示装置22aの表示画面は、中央に配置された4桁の16セグメント表示の水深表示領域22bと、その右下方に配置された3桁の7セグメントのメモ水深表示領域22cと、メモ水深表示領域22cの左方に配置された7セグメントの段階表示領域22dとを有する。段階表示領域22dは、調整レバー5の位置(段階SC)を、例えば0から30までの31段階で表示する。ここでは、水深表示領域22bに16セグメントの表示を用いているので、水深表示がより視認しやすくなる。
<リール制御部の構成>
リール制御部23は、図6に示すように、ソフトウェアで実現される機能構成としてモータ12を制御するモータ制御部60と、水深表示部22を制御する表示制御部61と、を有する。モータ制御部60は、モータ12をPWM制御するとともに、モータ12の固定子16の複数のコイル16bを励磁及び消磁する制御を行う。モータ制御部60は、ソフトウェアで実現される機能構成として、モータ速度検出部62は、回転規制部63と、を有する。
モータ速度検出部62は、モータ12の回転子17の回転位相を検出する回転位相検出部62aを有する。モータ12の励磁及び消磁制御の際には、モータ制御部60は、コンデンサ21でモータ12の逆起電流を整流して得られたデータによりモータ12の回転位相を検出する。この機能が回転位相検出部62aとなる。検出された回転位相に応じて、モータ制御部60は、複数のコイル16bを順次励磁及び消磁する。モータ速度検出部62は、この回転位相の時間的な変化によってモータ12の回転速度を検出する。
また、回転規制部63は、ドラグ機構44の温度Tdが第1所定温度TS1(例えば、65度から75度)以上の温度になると、調整レバー5の位置に関わらずモータ12の回転を規制する制御を行う。回転規制部63は、機能構成として速度制限部63aと、回転停止部63bと、を有する。速度制限部63aは、ドラグ機構44の温度Tdが第1所定温度TS1以上になると、モータ12の回転速度を制限する。具体的には、現在の回転速度から所定速度だけ減じた速度にする。また、回転停止部63bは、ドラグ機構44の温度Tdが第1所定温度TS1よりも高い第2所定温度TS2(例えば、95度以上)になると、モータ12の回転を停止する。
表示制御部61は、水深表示部22で表示されるスプール回転数に応じて仕掛けの水深、釣りのモード、調整レバー5の段階等のその他の情報の表示させる制御を行う。また、ドラグ機構44の温度Tdが前述した第1所定温度TS1以上の温度になると、その旨を水深表示部22及びブザー47により使用者に報知する制御を行う。
リール制御部23には、調整レバー5と、メニュースイッチSW1と、決定スイッチSW2と、メモスイッチSW3と、温度センサ29と、が接続される。また、スプール10の回転速度及び回転方向を検出するためのスプールセンサ41と、コイル16bへの通電をオンオフするとともにモータ12をPWM駆動する5つのFET25及びコンデンサ21を含むモータ駆動回路70と、ブザー47と、水深表示部22と、記憶部46と、他の入出力部と、が接続される。モータ駆動回路70には、モータ12に流れる電流値を検出する電流検出部70aが設けられている。電流検出部70aは、モータに流れる電流値に加えて電流方向も検出可能である。ブザー47及び水深表示部22は、報知部の一例である。
スプールセンサ41は、前後に並べて配置された2つのリードスイッチ(又はホール素子)から構成される。スプールセンサ41は、いずれのリードスイッチ(又はホール素子)が先に検出パルスを発したかによりスプール10の回転方向を検出できる。また、検出パルスにより釣り糸の糸長に関連するスプール回転数及びスプール回転速度を検出できる。
記憶部46は、例えばEEPROM等の不揮発メモリから構成される。記憶部46には、図7に示すように、棚位置等の表示データを記憶する表示データ記憶エリア50と、実際の糸長とスプール回転数との関係を示す糸長データを記憶する糸長データ記憶エリア51と、段階SCに応じたスプール10の巻き上げ速度(rpm)及び巻き上げトルク(電流値)を記憶する回転データ記憶エリア52と、種々のデータを記憶するデータ記憶エリア53とが設けられている。
回転データ記憶エリア52には、速度一定モードでの段階SC毎の上限速度Vsc、上限速度Vscの下限値Vsc1及び上限値Vsc2のデータと、張力一定モードでの段階SC毎の上限張力Qsの下限値Qsc1及び上限値Qsc2のデータと、が記憶される。データ記憶エリア53には糸長に関する各種のデータ及び温度のデータが格納される。糸長に関するデータとしては、例えば船縁停止位置が格納される。また、温度データとしては、第1所定温度TS1及び第2所定温度TS2が格納される。第1所定温度TS1は、前述したように65度から75度の温度であり、この実施形態では、70度である。第2所定温度TS2は、前述したように95度以上の温度であり、この実施形態では、100度である。
このような構成の電動リール100では、釣り糸を繰り出す時には、クラッチ操作部材11を手前(後方)に操作することによりクラッチをオフする。クラッチオフすると、ピニオンギア40と第2キャリア72dとの係合が解除されクラッチオフ状態となる。これによって、スプール10が自由回転状態になり、釣り糸に装着された重りの自重により釣り糸がスプール10から繰り出される。釣り糸が繰り出されるとスプール10が糸繰り出し方向に回転し、スプールセンサ41の検出パルスにより水深表示部22の水深表示が繰り出し量に応じて変化する。仕掛けが棚に到達すると、ハンドル2を糸巻取方向に回して図示しないクラッチ戻し機構によりクラッチをオンして釣り糸の繰り出しを停止する。
魚の当たりがあると、調整レバー5を操作し釣り糸を巻き上げる。調整レバー5を図1時計回りに揺動させると、その揺動角度に応じてスプール10の回転速度又は釣り糸に作用する張力の最大値を段階的に設定できる。
速度一定制御によって高速段階(例えば、調整レバー5の調整段階が20段以上の段階)で釣り糸を巻き取っているとき、大きな獲物がかかってドラグ機構44の温度が第1所定温度TS1以上になると、リール表面の温度の異常な上昇及びリール本体の強度の低下等の不具合が発生するおそれがある。そこで、モータ制御部60は、モータ12の回転速度を例えば5段階低速側の段階の速度に制御する。これによってドラグ機構44の温度上昇による不具合を防止できる。また、ドラグ機構44の温度Tdが第2所定温度TS2を超えると、モータ12の回転を停止する。
<リール制御部の動作>
次にリール制御部23の具体的な制御動作について、図8以降に示す制御フローチャートに基づいて説明する。なお、以下の説明は本発明の制御手順の一例であり、本発明の制御手順は以下のフローチャートで示した内容に限定されない。
電動リール100に図示しない電源ケーブルを介して電源が投入されると、図8のステップS1において初期設定を行う。この初期設定では各種の変数やフラグをリセットしたりする。また、船縁停止位置FNを標準的な船縁停止位置である第1糸長L1(例えば、6m)にセットする。
次にステップS2では表示処理を行う。表示処理では、水深表示等の各種の表示処理を行う。ここで、段階表示領域22dに段階SCを表示する。
ステップS3では、後述する各動作モードで算出される水深LXが第1糸長L1以下か否かを判断する。ステップS4では、いずれかのスイッチSW1〜スイッチSW3又は調整レバー5が押されたか否かのスイッチ入力の判断を行う。またステップS5ではスプール10が回転するか否かを判断する。この判断は、スプールセンサ41の出力により判断する。ステップS6では、その他の指令や入力がなされたか否かを判断する。
水深LXが第1糸長L1以下のときには、ステップS3からステップS7に移行する。ステップS7では、その水深で5秒以上停止するか否かを判断する。6m以下の水深で5秒以上停止するのは、船縁で釣った魚を取り込んだり、仕掛けに餌を付け直したりする等の動作を行っているときが多い。このため、5秒以上停止していると判断するとステップS8に移行し、そのときの水深LXを船縁停止位置FNにセットする。5秒未満の時はステップS7からステップS4に移行する。
スイッチ入力がなされた場合にはステップS4からステップS9に移行して図9に示すスイッチ入力の処理を実行する。またスプール10の回転が検出された場合にはステップS5からステップS10に移行する。ステップS10では各動作モード処理を実行する。その他の指令あるいは入力がなされた場合にはステップS6からステップS11に移行してその他の処理を実行する。
ステップS9のスイッチ入力処理では、図9のステップS15で調整レバー5が操作されたか否かを判断する。ステップS16では、メニュースイッチSW1が3秒以上長押されたか否かを判断する。ステップS17では、その他のスイッチが操作されたか否かを判断する。その他のスイッチの操作にはメニュースイッチSW1の通常操作、決定スイッチSW2、及びメモスイッチSW3等の操作を含んでいる。
調整レバー5が揺動操作されたと判断すると、ステップS15からステップS18に移行する。ステップS18では、調整レバー5の段階SCを取り込む。調整レバー5には図示しないロータリエンコーダが設けられており、ロータリエンコーダの出力を取り込む。ステップS19では、調整レバー5が段階SC=0に操作されたか否かを判断する。段階SCが「0」の場合は、ステップS20に移行し、モータ12をオフし、ステップS16に移行する。段階SCが「0」ではない場合は、ステップS21に移行する。
ステップS21では、メニュースイッチSW1の長押し操作により速度一定モードか張力一定モードのいずれか設定されたか否かを判断する。速度一定モードが設定されている場合は、ステップS21からステップS22に移行する。ステップS22では速度一定モードを実現するための図10に示すスプール速度制御処理を行い、ステップS16に移行する。速度一定モードではなく張力一定モードが設定されている場合は、ステップS21からステップS23に移行する。ステップS23では、ステップS23では張力一定モードを実現するための図11に示す電流制御処理を行い、ステップS16に移行する。
メニュースイッチSW1が長押し操作されると、ステップS16からステップS24に移行する。ステップS24では、速度一定モードが設定されるか否かを判断する。速度一定モードが設定される場合は、ステップS24からステップS25に移行して張力設定モードに設定し、ステップS17に移行する。張力一定モードが設定される場合は、ステップS24からステップS26に移行して張力設定モードに設定し、ステップS17に移行する
他のスイッチ入力がなされると、ステップS17からステップS27に移行し、例えば、底からモードへの変更やその他のモードの設定等の他のスイッチ入力処理を行い、図8に示すメインルーチンに戻る。
ステップS23のスプール速度制御処理では、図10のステップS31で調整レバー5により設定された段階SC、スプールセンサ41の出力により算出されたスプール10の回転速度Vd、及びモータ速度検出部62で検出されたモータ12の回転速度MVを取り込む。ステップS32では、スプール10の速度Vdが段階SCに応じた上限速度Vscの下限値Vsc1未満であるか否かを判断する。ステップS33では、スプール10の速度Vdが段階SCに応じた上限速度Vscの上限値Vsc2を超えたか否かを判断する。ステップS34では、温度センサ29からドラグ機構44の温度Tdを取り込む。ステップS35では、取り込んだドラグ温度Tdが第1所定温度Td未満であるか否かを判断する。この第1所定温度Tdは、前述したように例えば65度から75度の範囲である。
なお、速度制御を行う際に、段階SC毎に上限速度Vscの下限値Vsc1及び上限値Vsc2を設けたのは、下限値Vsc1及び上限値Vsc2の間で速度が変動している場合にはデューティ比が変化せず、デューティ比が頻繁に変動するワウリングが生じなくなり、フィードバック制御が安定するからである。
速度Vdが下限値Vsc1未満の場合には、ステップS32からステップS36に移行して現在の第1デューティ比D1を取り込む。この第1デューティ比D1は、回転データ記憶エリア52に設定が変更される都度記憶されている。また、段階SC毎に最大値DUscと最小値DLscが回転データ記憶エリア52に設定されており、最初に各段階SCに設定されたときには、例えばその中間の第1デューティ比D1=((DUsc+DLsc)/2)にセットされる。ステップS37では、現在の第1デューティ比D1が設定された段階SCの最大値DUscを超えているか否かを判断する。第1デューティ比D1が設定された段階SCの最大値DUscを超えている場合は、ステップS37からステップS38に移行して第1デューティ比D1に最大値DUscをセットする。第1デューティ比D1が設定された段階SCの最大値DUscを超えていない場合には、ステップS37からステップS39に移行し、第1デューティ比D1を所定の増分DI(例えば1%)だけ増やしてステップS33に移行する。なお、最高段階(SC=31)のデューティ比は、100%に設定されているが、それより前までの段階(SC=1から30)では最大値DUscはデューティ比が85%以下に設定されている。
速度Vdが上限値Vsc2を超えている場合には、ステップS33からステップS40に移行する。ステップS40では、現在の第1デューティ比D1を取り込む。この第1デューティ比D1は、ステップS36と同じである。ステップS41では、現在の第1デューティ比D1が設定された段階の最小値DLsc未満であるか否かを判断する。第1デューティ比D1が設定された段階の最小値DLsc未満である場合は、ステップS42に移行する。ステップS42では、第1デューティ比D1に最小値DLscをセットする。第1デューティ比D1が設定された段階の最小値DLsc未満ではない場合には、ステップS41からステップS43に移行し、第1デューティ比D1を所定の減分DI(例えば1%)だけ減らしてステップS34に移行する。
ステップS35で、取り込んだドラグ機構44の温度Tdが第1所定温度TS1以上であると判断すると、ステップS44に移行し、図11に示すドラグ温度処理を実行する。第1所定温度TS1未満であると判断すると、スイッチ入力処理に戻る。
図11のドラグ温度処理では、ステップS51で、スプール10の回転速度Vdがモータ12の回転速度MVを減速比Rによって除算した回転速度(MV/R)未満(Vd<MV/R)か否かを判断する。ステップS52では、現在のデューティ比D1を取り込む。ステップS53では、現在のデューティ比D1を減少用デューティ比DDだけ減少させる。減少用デューティ比DDは、例えば、現在のデューティ比D1よりも5段階程度低速側の段階のデューティ比となるように定められたものであり、スプール速度制御用の増減のデューティ比DI(1パーセント)よりも大きい。ステップS54では、ドラグ機構44の温度Tdが第2所定温度TS2未満か否かを判断する。ドラグ機構44の温度Tdが第2所定温度TS2未満の場合は、ステップS54からステップS55に移行し、ドラグ機構44の温度Tdが第1所定温度TS1よりも高い異常であり、モータ12を減速させた旨を水深表示部22のバックライトを第1間隔で点滅することによって報知する。なお、ブザー47を第2間隔で鳴動させて前述の旨を報知してもよい。また、水深表示部22及びブザー47の両方を用いて報知してもよい。
ドラグ機構44の温度Tdが第2所定温度TS2以上の場合は、ステップS54からステップS56に移行する。ステップS56では、モータ12の回転を停止する。これは、ドラグ機構44の滑りによる温度上昇がモータ12に不具合を起こさせることを防止するためである。ステップS57では、ドラグ機構44の温度Tdが第2所定温度TS2よりも高い異常であり、モータ12を停止させた旨を水深表示部22のバックライトを、例えば第1間隔よりも短い第3間隔で点滅することによって報知する。なお、ブザー47を第2間隔よりも短い第4で鳴動させて前述の旨を報知してもよい。また、水深表示部22及びブザー47の両方を用いて報知してもよい。
このように、モータ12の出力を低下又はモータ12の回転を停止した後にドラグ機構44の温度が滑りによって異常に高くなったことを報知することにより、モータの回転速度を低くしたこと又はモータの回転を停止したことを使用者が認識できる。このため、使用者は、機器の異常で、モータの回転速度が低下又は停止したのではなく、モータの過負荷防止、ドラク機構の性能低下を防止するための制御動作が機能していることを認識できる。
ステップS24のモータ電流制御処理では、図12のステップS61で調整レバー5により設定された段階SCと、電流検出部70aの検出結果(トルク)を糸巻径によって除算して得られる張力Qdと、を取り込む。この張力Qdは、回転データ記憶エリア52に記憶される。ステップS62では、張力Qdが段階SCに応じた上限張力Qsの下限値Qsc1未満か否かを判断する。ステップS63では、張力Qdが段階SCに応じた上限張力Qsの上限値Qsc2を超えているか否かを判断し、いずれの判断も「NO」のときはスイッチ入力処理に戻る。
なお、張力制御を行う際に、段階SC毎に上限張力Qsの下限値Qsc1及び上限値Qsc2を設けたのは、速度一定モードと同様に両張力Qsc1,Qsc2の間で張力が変動している場合にはデューティ比が変化せず、デューティ比が頻繁に変動するワウリングが生じなくなり、フィードバック制御が安定するからである。
張力Qdが下限値Qsc1未満の場合には、ステップS62からステップS64に移行する。ステップS64では、現在の第2デューティ比D4を取り込む。この第2デューティ比D4は、回転データ記憶エリア52に設定が変更される都度記憶されている。ステップS65では、第2デューティ比D4を所定の増分DI(例えば1%)だけ増やしてステップS3に移行する。これを張力Qdが下限値Qsc1を超えるまで続ける。
張力Qdが上限値Qsc2を超えている場合には、ステップS63からステップS66に移行して現在の第2デューティ比D4を取り込む。この第2デューティ比D4もステップS64と同様である。ステップS67では、第2デューティ比D4を所定の減分DI(例えば1%)だけ減らしてスイッチ入力処理に戻る。これを張力Qdが上限値Qsc2を下回るまで続ける。
ステップS10の各動作モード処理では、図13のステップS71でスプール10の回転方向が糸繰り出し方向か否かを判断する。この判断は、スプールセンサ41のいずれのリードスイッチが先にパルスを発したか否かにより判断する。スプール10の回転方向が糸繰り出し方向と判断するとステップS71からステップS72に移行する。ステップS72では、スプール回転数が減少する毎にスプール回転数から糸長データ記憶エリア51に記憶されたデータを読み出して水深(放出された糸長)LXを算出する。この水深LXがステップS2の表示処理で表示される。ステップS73では、得られた水深LXが棚又は底位置に一致したか、つまり、仕掛けが棚又は底に到達したか否かを判断する。棚又は底位置は、仕掛けが棚又は底に到達したときにメモスイッチSW3を押すことで記憶部46の表示データ記憶エリア50にセットされる。ステップS74では、学習モード等の他のモードか否かを判断する。
水深が棚位置又は底位置に一致するとステップS73からステップS75に移行し、仕掛けが棚又は底に到達したことを報知するためにブザー47を鳴らす。他のモードの場合には、ステップS74からステップS76に移行し、指定された他のモードを実行する。他のモードではない場合には、各動作モード処理を終わりメインルーチンに戻る。
スプール10の回転が糸巻き取り方向と判断するとステップS71からステップS77に移行する。ステップS77では、スプール回転数から糸長データ記憶エリア51に記憶されたデータを読み出して水深LXを算出する。この水深LXがステップS2の表示処理で表示される。
ステップS78では、船縁停止位置に到達したか否かを判断する。船縁停止位置FNに到達するとステップS78からステップS79に移行する。ステップS79では、仕掛けが船縁にあることを報知するためにブザー47を鳴らす。ステップS80では、モータ12をオフする。これにより魚や釣れたときや仕掛けを回収して餌を交換するときに、取り込みやすい位置に魚や仕掛けが配置される。船縁停止位置まで巻き取っていない場合にはメインルーチンに戻る。
ここでは、ドラグ機構44の周囲に温度センサ29を設けてドラグ機構44の温度を計測しているので、ドラグ機構44の温度を精度良く検出して、温度上昇による不具合を防止できる。
<他の実施形態>
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組合せ可能である。
(a)前記実施形態では、張力一定制御と、速度一定モードとを切り換え可能にしたが、本発明はこれに限定されない。例えば、速度一定制御だけを行ってもよい。
(b)前記実施形態では、モータ12のスプールの内部に収納したが、モータをスプール外に装着した電動リールにも本発明を適用できる。
(c)前記実施形態では、モータ操作部材として調整レバーを例示したが本発明はこれに限定されない。例えば、押しボタンの押圧操作時間等により段階を増加及び減少してもよい。
(d)前記実施形態では、ブラシレスモータを使用して逆起電流によって回転位相を検出し、モータ12の回転速度を検出したが、本発明はこれに限定されない。モータ12の回転速度をセンサによって検出してもよい。
(e)前記実施形態では、報知部としてブザー及び水深表示部を例示したが、別にLED(発光ダイオード)などのランプをリールに設け、ランプの点灯又は点滅等によってドラグ機構の異常な温度の情報又はモータの規制情報を報知してもよい。
(f)前記実施形態では、温度センサ29をドラグ機構44の周囲において、固定されたリール本体1の機構装着板9bに設けたが、本発明はこれに限定されない。ドラグ機構44を構成する部材に温度センサを直接設けてもよい。たとえば、ラチェットホイール42c又は第1ドラグ板45aに設けてもよい。この場合、駆動軸38に回転自在な電気端子を設けて温度センサとリール制御部とを電気的に接続してもよい。
(g)前記実施形態では、第1所定温度TS1でモータ12を減速させたが、第1所定温度でモータ12を停止させてもよい。また、第2所定温度TS2でモータ12をさらに減速させてもよい。
<特徴>
上記実施形態は、下記のように表現可能である。
(A)電動リール100の制御システム90は、スプール10と、ドラグ機構44と、スプール10を駆動するモータ12とを有する電動リール100の制御装置である。制御システム90は、温度センサ29と、リール制御部23と、を備えている。温度センサ29は、ドラグ機構44の周囲に設けられ、ドラグ機構44の作動によって生じる温度を計測する。リール制御部23は、温度センサ29が第1所定温度TS1よりも高い温度Tdを計測すると、電動リール100を制御する。
この電動リールの制御システム90では、ドラグ機構44の周囲に温度センサ29が設けられる。温度センサ29が第1所定温度TS1よりも高い温度Tdを計測すると、リール制御部23が電動リール100を制御する。例えば、モータ12の回転を、停止を含めて規制する制御、ドラグ機構44の温度が異常に高いことを報知する制御などが行われる。ここでは、温度センサ29がドラグ機構44の周囲に設けられるので、ドラグ機構44の温度を精度良く計測できる。このため、ドラグ機構44の温度が第1所定温度TS1よりも上昇すると、温度上昇に対処する制御をリール制御部23が精度良く行える。これにより、ドラグ機構44の温度の上昇による不具合を防止できる。
(B)リール制御部23は、温度センサ29が第1所定温度TS1よりも高い温度を計測すると、モータ12の回転を規制してもよい。これによって、モータ12の発熱を抑えることができ、ドラグ機構44の温度上昇も抑えることができる。
(C)リール制御部23は、温度センサ29が第1所定温度TS1よりも高い温度を計測すると、モータ12の回転速度を制限してもよい。この場合には、ドラグ機構44の温度が第1所定温度TS1よりも高い異常な温度を計測しても、モータ12が停止しないので、ハンドル2を手で回す巻取操作を加えることで釣り糸の巻き取りが可能になる。
(D)リール制御部23は、温度センサ29が第1所定温度TS1よりも高い第2所定温度TS2を計測すると、モータ12の回転を停止させてもよい。この場合には、ドラグ機構44の温度が第2所定温度TS2以上になると、モータ12が停止するので、モータ12からの発熱が減少する。
(E)制御システム90は、ドラグ機構44の状態を報知する報知部(ブザー47又は水深表示部22)をさらに備えてもよい。リール制御部23は、温度センサ29が第1所定温度TS1よりも高い温度を計測すると、報知部を動作させる。この場合には、ドラグ機構44が第1所定温度よりも高い温度になると、報知部が使用者にその旨を報知できる。このため、使用者がドラグ機構44の異常な温度の上昇を認識できる。
(F)リール制御部23は、温度センサ29が第1所定温度TS1よりも高い温度を計測すると、ドラグ機構44の温度が高いことを水深表示部22に表示させてもよい。この場合には、使用者がドラグ機構44の温度が高いことを視認できるので、使用者がドラグ機構44の温度が以上に高いことを確実に認識できる。
(G)制御システム90は、スプール10に巻き付けられる釣り糸の先端の水深を表示可能な水深表示部22をさらに備えてもよい。リール制御部23は、水深表示部22を報知部として機能させ、水深表示部22の表示エリアにドラグ機構の温度が高いことを表示させる。この場合には、水深表示部22にドラグ機構の温度が異常に高いことを、例えば、バックライトの色を変更又は点滅する、若しくは文字を表示する等によって表示できるので、報知のための別の表示部を設けること必要がない。
(H)リール制御部23は、温度センサ29が第1所定温度TS1よりも高い温度を計測すると、報知部としてのブザー47を鳴動させ、ブザー47にドラグ機構44の温度が高いことを報知させてもよい。この場合には、音でドラグ機構44の温度が高いことを報知できるので、表示を見ることなく使用者がドラグ機構44の温度が異常に高いことを認識できる。