JP6190880B2 - 横方向テープ移動検出器 - Google Patents
横方向テープ移動検出器 Download PDFInfo
- Publication number
- JP6190880B2 JP6190880B2 JP2015518458A JP2015518458A JP6190880B2 JP 6190880 B2 JP6190880 B2 JP 6190880B2 JP 2015518458 A JP2015518458 A JP 2015518458A JP 2015518458 A JP2015518458 A JP 2015518458A JP 6190880 B2 JP6190880 B2 JP 6190880B2
- Authority
- JP
- Japan
- Prior art keywords
- tape
- optical signal
- photodetector
- photoemitter
- tape edge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B15/00—Driving, starting or stopping record carriers of filamentary or web form; Driving both such record carriers and heads; Guiding such record carriers or containers therefor; Control thereof; Control of operating function
- G11B15/60—Guiding record carrier
- G11B15/602—Guiding record carrier for track selection, acquisition or following
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/02—Registering, tensioning, smoothing or guiding webs transversely
- B65H23/0204—Sensing transverse register of web
- B65H23/0216—Sensing transverse register of web with an element utilising photoelectric effect
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10305—Improvement or modification of read or write signals signal quality assessment
- G11B20/10388—Improvement or modification of read or write signals signal quality assessment control of the read or write heads, e.g. tracking errors, defocus or tilt compensation
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/58—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B5/584—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for track following on tapes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/40—Sensing or detecting means using optical, e.g. photographic, elements
- B65H2553/41—Photoelectric detectors
- B65H2553/412—Photoelectric detectors in barrier arrangements, i.e. emitter facing a receptor element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/11—Dimensional aspect of article or web
- B65H2701/113—Size
- B65H2701/1133—Size of webs
- B65H2701/11332—Size of webs strip, tape, narrow web
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/13—Parts concerned of the handled material
- B65H2701/131—Edges
- B65H2701/1315—Edges side edges, i.e. regarded in context of transport
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B2220/00—Record carriers by type
- G11B2220/90—Tape-like record carriers
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Instruments For Measurement Of Length By Optical Means (AREA)
- Adjustment Of The Magnetic Head Position Track Following On Tapes (AREA)
Description
記憶テープ駆動装置業界では、透過型光学センサを用いて、テープ送りサブシステム上を進むテープの縁部の動的挙動を測定してきた。この技術は、一般的に、テープの横方向移動(lateral motion of the tape:LTM)をテープ送りサブシステムにおける任意の位置で推定するよう用いられている。しかしながら、この種の測定の精度および感度は、いくつかの制限によって厳しく影響を受ける。そのような制限は、LTMとして不正確に現れる縁部輪郭の不完全性、光学的設定による感度制限、ならびに電気機械的および光学的ノイズおよびドリフトコンタミネーションを含む。
この発明は少なくとも1つの実施の形態において記憶テープ駆動装置における記憶テープの横方向移動を検出するためのテープ縁部センサシステム提供することによって先行技術の1つ以上の問題を解決する。横方向テープ移動は、読取/書込動作中の記憶テープ移動の垂直方向における記憶テープの移動である。テープ縁部センサシステムは、第1の光信号を発する第1のフォトエミッタと、第1の光信号の一部を受取るよう位置決めされ、受取った第1の光信号の一部に比例する第1の検出された信号を与える第1の光検出器とを含む。第1のフォトエミッタは、第1の光信号が変調もされるように、変調される。第1のバッフルは第1の開口を規定し、第1のバッフルは第1のフォトエミッタと第1の光検出器との間に配置される。第1の開口は、光学フィルタとして作用し、第1のテープ縁部に、横方向テープ移動が検出される第1の領域を規定する。第1のテープ縁部は第1の光信号を部分的に遮断し、それによって、第1の開口とともに、第1の光検出器によって受取られる第1の信号の一部における変動が横方向テープ移動によって少なくとも一部生じるように、第1の光検出器によって受取られる第1の光信号の一部を規定する。帰還システムが、第1のフォトエミッタおよび第1の光検出器に接続し、第1のフォトエミッタの変調および第1の検出された信号のローパスフィルタ処理を与えて、ノイズおよび信号ドリフトからの干渉を最小限にする。
この発明の現在好ましい構成、実施の形態および方法が、ここで詳細に言及され、それらは、現在発明者に既知の、この発明を実施する最良のモードを構成する。図は、必ずしも尺度決めされない。しかしながら、開示される実施の形態は、さまざまなおよび代替えの形式で実施されてもよい、この発明の単なる例示であることが理解される。したがって、ここに開示される特定の詳細は限定的に解釈されるものではなく、単に、この発明の任意の局面に対する代表的な基礎として、および/またはこの発明をさまざまに用いるよう当業者に教示するための代表的な基礎として解釈されるべきである。
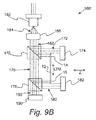
のテープ縁部14に第3の領域60を規定し、第3の光信号は、記憶テープ12が第3の光信号の一部を遮断する状態で、第3の領域60を介して第3の光検出器54によって受取られる。この変形例では、システム10は、さらに、第4のフォトエミッタ62、および第4のフォトエミッタ62から第4の光信号を受取るよう位置決めされる第4の光検出器64を含む。第4のフォトエミッタ62は、第4の光信号が変調もされるように、変調される。第4の光検出器64は、第4の光検出器64によって受取られた第4の光信号の一部に比例する第4の検出信号を出力する。ある改良では、第4のフォトエミッタ62はレーザダイオードであり、および/または第4の光検出器64はフォトダイオードである。第4のバッフル66は第4の開口68を含み、第4のフォトエミッタ62と第4の光検出器64との間に配置される。第4の開口68は、第2のテープ縁部16に第4の領域70を規定し、第4の光信号は、記憶テープ12が第4の光信号の一部を遮断する状態で、第4の領域70を介して第4の光検出器64によって受取られる。ある改良では、安定部72を光検出器の対間に配置して、テープ12の移動を安定させる。そのような改良では、テープヘッドは安定部72の反対側に位置決めされる。第3のフォトエミッタ52および第3の光検出器54も、上に述べられるように帰還システム40に接続される。
A=LTMa+Na
B=LTMb+Nb
C=LTMc+Nc
D=LTMd+Nd
式中、A、B、C、Dは、それぞれ光検出器24、44、54および64からの信号であり、Na、Nb、NcおよびNdは各検出器と関連付けられる非コヒーレントノイズであり;LTMa、LTMb、LTMcおよびLTMaは、それぞれ光検出器24、44、54および64によって検出される横方向テープ移動であり;LTMfは前方位置68での横方向テープ移動であり;LTMbは後方位置70における横方向テープ移動である。LTMa=LTMb=LTMfおよびLTMC=LTMd=LTMbであるので、A+B=2LTMf+Na+NbはLTMf=(A+B)/2+(Na+Nb)/2を意味する。NaおよびNbは非コヒーレントノイズであるので、(Na+Nb)/2<NaまたはNbおよびC+D=2LTMb+Nc+Nd=>LTMb=(C+D)/2+(Nc+Nd)2である。NcおよびNdは非コヒーレントノイズであるので、(Nc+Nd)/2<NcまたはNdである。したがって、LTMfおよびLTMbは、位置68および70における、より正確な測定値である。さらにテープ送りシステムまたは安定部それ自体のためにテープ上に瞬間の傾きがある場合、LTMf(t)≠LTMb(t)であり、したがって傾き=LTMf(t)−LTMb(t)である。
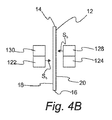
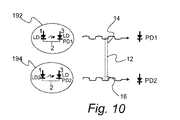
6によって電子的に結合(加算)される。テープのZ位置が変動するにつれて、一方のフォトインタラプタの伝達関数の傾きにおける変化は、第2のフォトインタラプタの傾きにおける変化と同じ大きさを有するが、反対の符号を有し、それらの信号が加算されると、2つのセンサの反対の傾きは相殺する。ある改良では、第1のフォトエミッタ128および第1の光検出器124はフォトインタラプタ132内に含まれ、一方、第2のフォトエミッタ122および第2の光検出器130はフォトインタラプタ134内に含まれる。この解決策の有効性は、2つのフォトインタラプタが一致するZ依存性を有すること、それらの伝達関数が適切な相殺を得るために整列するように、それらは鉛直に整列されること、およびテープが2つのセンサ間の距離(約3mmまたは4mm)を横断する際にテープのZ移動は著しく変化しないことを必要とする。
Claims (10)
- 記憶テープ駆動装置における記憶テープの横方向移動を検出するためのテープ縁部センサシステムであって、前記記憶テープは、第1のテープ縁部、第2のテープ縁部、第1のテープ側および第2のテープ側を有し、横方向テープ移動は、読取/書込動作中の記憶テープ移動の垂直方向における前記記憶テープの移動であり、前記テープ縁部センサシステムは、
第1の光信号を発する第1のフォトエミッタを含み、前記第1のフォトエミッタは、前記第1の光信号が変調もされるように、変調され、前記テープ縁部センサシステムは、
前記第1の光信号の一部を受取るよう位置決めされ、受取った前記第1の光信号の前記一部に比例する第1の検出された信号を与える第1の光検出器と、
第1の開口を規定する第1のバッフルとをさらに含み、前記第1のバッフルは前記第1のフォトエミッタと前記第1の光検出器との間に配置され、前記第1の開口は、前記第1のテープ縁部に、横方向テープ移動が検出される第1の領域を規定し、前記第1のテープ縁部は前記第1の光信号を部分的に遮断し、それによって、前記第1の開口とともに、前記第1の光検出器によって受取られる前記第1の光信号の前記一部における変動が横方向テープ移動によって少なくとも一部生じるように、前記第1の光検出器によって受取られる前記第1の光信号の前記一部を規定し、前記テープ縁部センサシステムはさらに、
第3の光信号を発する第3のフォトエミッタを含み、前記第3のフォトエミッタは、前記第3の光信号が変調もされるように、変調され、前記テープ縁部センサシステムは、
前記第3の光信号の一部を受取るよう位置決めされ、受取った前記第3の光信号の前記一部に比例する第3の検出された信号を与える第3の光検出器と、
第3の開口を規定する第3のバッフルとをさらに含み、前記第3のバッフルは前記第3のフォトエミッタと前記第3の光検出器との間に配置され、前記第3の開口は、前記第1のテープ縁部に、横方向テープ移動が検出される第3の領域を規定し、前記第1のテープ縁部は前記第3の光信号を部分的に遮断し、それによって、前記第3の開口とともに、前記第3の光検出器によって受取られる前記第3の光信号の前記一部における変動が横方向テープ移動によって少なくとも一部生じるように、前記第3の光検出器によって受取られる前記第3の光信号の前記一部を規定し、前記テープ縁部センサシステムはさらに、
前記第1および第3のフォトエミッタと、前記第1および第3の光検出器とに接続される帰還システムを含み、前記帰還システムは、前記第1ならびに第3のフォトエミッタの変調および前記第1ならびに第3の検出された信号のローパスフィルタ処理を与えて、ノイズおよび信号ドリフトからの干渉を最小限にし、前記テープ縁部センサシステムは、
前記記憶テープの横方向移動を安定させる安定部をさらに含み、
前記第1の光検出器は前記安定部に対して前方位置に位置し、前記第3の光検出器は前記安定部に対して後方位置に位置する、テープ縁部センサシステム。 - 第2の光信号を発する第2のフォトエミッタをさらに含み、前記第2のフォトエミッタは、前記第2の光信号が変調もされるように、変調され、前記テープ縁部センサシステムはさらに、
前記第2のフォトエミッタから前記第2の光信号の一部を受取るよう位置決めされ、受取った前記第2の光信号の前記一部に比例する第2の検出された信号を与える第2の光検出器と、
第2の開口を規定する第2のバッフルとを含み、前記第2のバッフルは前記第2のフォトエミッタと前記第2の光検出器との間に配置され、前記第2の開口は、前記第2のテープ縁部に、横方向テープ移動が検出される第2の領域を規定し、前記第2のテープ縁部は前記第2の光信号を部分的に遮断し、それによって、前記第2の開口とともに、前記第2の光検出器によって受取られる前記第2の光信号の前記一部における変動が横方向テープ移動によって少なくとも一部生じるように、前記第2の光検出器によって受取られる前記第2の光信号の前記一部を規定し、前記帰還システムは前記第2のフォトエミッタおよび前記第2の光検出器に接続し、前記帰還システムは、前記第2の光検出器の変調および前記第2の検出された信号のローパスフィルタ処理を与えて、ノイズおよび信号ドリフトからの干渉を最小限にする、請求項1に記載のテープ縁部センサシステム。 - 第4の光信号を発する第4のフォトエミッタをさらに含み、前記第4のフォトエミッタは、前記第4の光信号が変調もされるように、変調され、前記テープ縁部センサシステムはさらに、
前記第4のフォトエミッタから前記第4の光信号の一部を受取るよう位置決めされ、受取った前記第4の光信号の前記一部に比例する第4の検出された信号を与える第4の光検出器と、
第4の開口を規定する第4のバッフルとを含み、前記第4のバッフルは前記第4のフォトエミッタと前記第4の光検出器との間に配置され、前記第4の開口は、前記第2のテープ縁部に、横方向テープ移動が検出される第4の領域を規定し、前記第2のテープ縁部は前記第4の光信号を部分的に遮断し、それによって、前記第4の開口とともに、前記第4の光検出器によって受取られる前記第4の光信号の前記一部における変動が横方向テープ移動によって少なくとも一部生じるように、前記第4の光検出器によって受取られる前記第4の光信号の前記一部を規定し、前記帰還システムは、前記第4のフォトエミッタおよび前記第4の光検出器に接続し、前記帰還システムは、前記第4の光検出器の変調および前記第4の検出された信号のローパスフィルタ処理を与えて、ノイズおよび信号ドリフトからの干渉を最小限にする、請求項2に記載のテープ縁部センサシステム。 - 前記第1のフォトエミッタ、前記第2のフォトエミッタ、前記第3のフォトエミッタおよび前記第4のフォトエミッタは、前記第1の光検出器、前記第2の光検出器、前記第3の光検出器および前記第4の光検出器からの出力が各々独立してローパスフィルタでフィルタ処理される状態で、同期して整流される、請求項3に記載のテープ縁部センサシステム。
- 前記第1の光信号、前記第2の光信号、前記第3の光信号および前記第4の光信号は、各々独立して振幅変調される、請求項3に記載のテープ縁部センサシステム。
- 前記第1の開口は、第1の長さおよび第1の幅を有して、概ね矩形であり、前記第1の長さは前記第1の幅より大きい、請求項1〜5のいずれか1項に記載のテープ縁部センサシステム。
- 前記第1の長さは、横方向テープ移動測定がテープ縁部粗さに実質的に反応しないように、前記記憶テープの移動の方向に実質的に平行に位置決めされる、請求項6に記載のテープ縁部センサシステム。
- 前記第1の長さは、前記記憶テープの移動の方向に実質的に垂直に位置決めされる、請求項6に記載のテープ縁部センサシステム。
- 前記帰還システムは、前記第1の光信号におけるドリフトを経時的に補償する、正規化されたスケーリングを与える、請求項1〜8のいずれか1項に記載のテープ縁部センサシステム。
- 前記第2の光検出器は前記安定部に対して前方位置に位置し、前記第4の光検出器は前記安定部に対して後方位置に位置する、請求項3に記載のテープ縁部センサシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/531,875 US8760786B2 (en) | 2012-06-25 | 2012-06-25 | Lateral tape motion detector |
| US13/531,875 | 2012-06-25 | ||
| PCT/US2013/045629 WO2014004096A1 (en) | 2012-06-25 | 2013-06-13 | Lateral tape motion detector |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015526707A JP2015526707A (ja) | 2015-09-10 |
| JP2015526707A5 JP2015526707A5 (ja) | 2016-04-07 |
| JP6190880B2 true JP6190880B2 (ja) | 2017-08-30 |
Family
ID=48699971
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015518458A Active JP6190880B2 (ja) | 2012-06-25 | 2013-06-13 | 横方向テープ移動検出器 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8760786B2 (ja) |
| EP (1) | EP2864984B1 (ja) |
| JP (1) | JP6190880B2 (ja) |
| CN (1) | CN104272385B (ja) |
| AU (1) | AU2013280927B2 (ja) |
| HK (1) | HK1204137A1 (ja) |
| NZ (1) | NZ629024A (ja) |
| WO (1) | WO2014004096A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015073165A1 (en) * | 2013-11-12 | 2015-05-21 | Illinois Tool Works Inc. | Liquid presence/turbidity sensor using single optical channel |
| US9123377B1 (en) | 2014-10-03 | 2015-09-01 | Oracle International Corporation | Apparatus and method for allowing passage of a leader through a tape drive tape path |
| KR101766777B1 (ko) * | 2016-01-27 | 2017-08-09 | 한국산업기술대학교 산학협력단 | 이동 방향 감지 장치 |
| CN110686603B (zh) * | 2019-09-27 | 2021-06-22 | 中科精瓒(武汉)医疗技术有限公司 | 带传动定位校准方法和装置 |
| CN112431009A (zh) * | 2020-11-22 | 2021-03-02 | 苏州比达尔创新材料科技有限公司 | 一种纺织面料水平度验布校核设备 |
| CN115183758B (zh) * | 2022-09-07 | 2022-12-06 | 四川图林科技有限责任公司 | 一种超高精度激光陀螺电磁检抖装置及检测方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL7712418A (nl) * | 1977-11-11 | 1979-05-15 | Philips Nv | Opteken- en/of weergeefinrichting voor een bandvormige magnetische registratiedrager voor- zien van een regelsysteem voor de positionering van de magneetkop. |
| US4913328A (en) | 1987-06-05 | 1990-04-03 | Odetics, Inc. | Active tape tracking system with crown guide rollers for magnetic recorder/players |
| US5362973A (en) | 1990-06-25 | 1994-11-08 | Xerox Corporation | Quantum fabricated via photo induced evaporation enhancement during in situ epitaxial growth |
| US5172186A (en) * | 1990-07-03 | 1992-12-15 | Konica Corporation | Laser interferometry length measuring an apparatus employing a beam slitter |
| EP0471101B1 (de) | 1990-08-14 | 1997-03-12 | Tandberg Data A/S | Verfahren zum Positionieren eines Magnetkopfes gegenüber dem Speichermedium eines Magnetschichtspeichers |
| JP3080476B2 (ja) * | 1992-05-29 | 2000-08-28 | 株式会社東海理化電機製作所 | 位置検出装置 |
| DE69216327T2 (de) * | 1991-09-09 | 1997-04-24 | Tokai Rika Co Ltd | Positionsdetektionsapparat |
| US5412474A (en) | 1992-05-08 | 1995-05-02 | Smithsonian Institution | System for measuring distance between two points using a variable frequency coherent source |
| FR2712691B1 (fr) | 1993-11-19 | 1995-12-22 | Bernard Fondeur | Dispositif de mesure par interférométrie laser. |
| JP3974670B2 (ja) * | 1996-05-28 | 2007-09-12 | 松下電工株式会社 | 光学式変位測定装置 |
| US5991112A (en) * | 1997-03-04 | 1999-11-23 | Excel Precision | Non-contact servotrack writing with phase sensitive detection |
| JP2001208533A (ja) * | 2000-01-25 | 2001-08-03 | Sony Corp | 長尺体の幅方向蛇行量の測定方法及びその装置、並びに磁気記録媒体の製造方法及びその装置 |
| US6580581B1 (en) * | 2000-08-16 | 2003-06-17 | International Business Machines Corporation | Recovery of lateral position of a servo system with respect to longitudinal servo bands of a magnetic tape |
| US6697206B2 (en) | 2000-12-19 | 2004-02-24 | Imation Corp. | Tape edge monitoring |
| US7136255B2 (en) * | 2003-10-20 | 2006-11-14 | Quantum Corporation | Servo methods and systems using masked medium edge position sensors |
| US20060103968A1 (en) * | 2004-11-12 | 2006-05-18 | Jurneke Joe K | Dynamic skew compensation systems and associated methods |
| GB2488933B (en) * | 2009-12-21 | 2016-08-03 | Ibm | Method and apparatus for operating a storage device |
-
2012
- 2012-06-25 US US13/531,875 patent/US8760786B2/en active Active
-
2013
- 2013-06-13 EP EP13732035.4A patent/EP2864984B1/en active Active
- 2013-06-13 AU AU2013280927A patent/AU2013280927B2/en active Active
- 2013-06-13 WO PCT/US2013/045629 patent/WO2014004096A1/en unknown
- 2013-06-13 NZ NZ629024A patent/NZ629024A/en unknown
- 2013-06-13 JP JP2015518458A patent/JP6190880B2/ja active Active
- 2013-06-13 CN CN201380019029.8A patent/CN104272385B/zh active Active
-
2015
- 2015-05-15 HK HK15104638.3A patent/HK1204137A1/xx unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN104272385A (zh) | 2015-01-07 |
| EP2864984B1 (en) | 2018-10-03 |
| US8760786B2 (en) | 2014-06-24 |
| AU2013280927A1 (en) | 2014-09-11 |
| WO2014004096A1 (en) | 2014-01-03 |
| AU2013280927B2 (en) | 2019-01-03 |
| NZ629024A (en) | 2016-07-29 |
| CN104272385B (zh) | 2017-03-01 |
| US20130342930A1 (en) | 2013-12-26 |
| HK1204137A1 (en) | 2015-11-06 |
| JP2015526707A (ja) | 2015-09-10 |
| EP2864984A1 (en) | 2015-04-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6190880B2 (ja) | 横方向テープ移動検出器 | |
| US6697206B2 (en) | Tape edge monitoring | |
| JP4093971B2 (ja) | 光学式移動情報検出装置および移動情報検出システムおよび電子機器およびエンコーダ | |
| JP2020513557A (ja) | 光学的粒子センサーモジュール | |
| JP2019522778A (ja) | 粒子センサー、粒子検出方法及びコンピュータ・プログラム | |
| US6713743B2 (en) | Fabry-perot resonator and system for measuring and calibrating displacement of a cantilever tip using the same in atomic force microscope | |
| BR112019011460A2 (pt) | módulo sensor a laser, dispositivo de comunicação móvel, método de detecção de partícula e produto de programa de computador | |
| US7449678B2 (en) | Optical encoder having reference position detection | |
| JP2015526707A5 (ja) | ||
| EP3415861A1 (en) | Contact making feeler head for coordinate measuring machine using a photoluminescent material and quadrant photodetectors for monitoring the feeler displacement | |
| JPS6231282B2 (ja) | ||
| JPWO2014132379A1 (ja) | フーリエ変換赤外分光光度計 | |
| KR20190128068A (ko) | 오프셋 빔을 통한 입자 검출을 위한 레이저 센서 모듈 | |
| US5315373A (en) | Method of measuring a minute displacement | |
| KR101093080B1 (ko) | 빛살 되먹임 광원을 이용한 표면 플라즈몬 바이오 센서 | |
| JP4576014B2 (ja) | 光学式エンコーダー | |
| JP2626009B2 (ja) | 粒度分布測定装置 | |
| JP4093942B2 (ja) | 速度計、変位計、振動計および電子機器 | |
| JP4595697B2 (ja) | 反射型光ギャップセンサ | |
| JPH09281252A (ja) | 光学式飛雪・飛砂粒子粒径別連続自動計測装置 | |
| JPS5856094B2 (ja) | 微小振動測定装置 | |
| CN107783379B (zh) | 一种测量信息的补偿方法 | |
| JPH02193041A (ja) | 粒度分布測定装置 | |
| JPH074909A (ja) | レーザセンサ装置 | |
| JPH06307848A (ja) | プローブ顕微鏡の探針変位検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160215 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170718 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6190880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |