JP6173102B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP6173102B2 JP6173102B2 JP2013159298A JP2013159298A JP6173102B2 JP 6173102 B2 JP6173102 B2 JP 6173102B2 JP 2013159298 A JP2013159298 A JP 2013159298A JP 2013159298 A JP2013159298 A JP 2013159298A JP 6173102 B2 JP6173102 B2 JP 6173102B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- toner bottle
- rotation
- image forming
- forming apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/06—Apparatus for electrographic processes using a charge pattern for developing
- G03G15/08—Apparatus for electrographic processes using a charge pattern for developing using a solid developer, e.g. powder developer
- G03G15/0822—Arrangements for preparing, mixing, supplying or dispensing developer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/1661—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements means for handling parts of the apparatus in the apparatus
- G03G21/1676—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements means for handling parts of the apparatus in the apparatus for the developer unit
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/06—Apparatus for electrographic processes using a charge pattern for developing
- G03G15/08—Apparatus for electrographic processes using a charge pattern for developing using a solid developer, e.g. powder developer
- G03G15/0822—Arrangements for preparing, mixing, supplying or dispensing developer
- G03G15/0865—Arrangements for supplying new developer
- G03G15/0867—Arrangements for supplying new developer cylindrical developer cartridges, e.g. toner bottles for the developer replenishing opening
- G03G15/0868—Toner cartridges fulfilling a continuous function within the electrographic apparatus during the use of the supplied developer material, e.g. toner discharge on demand, storing residual toner, acting as an active closure for the developer replenishing opening
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/55—Self-diagnostics; Malfunction or lifetime display
- G03G15/553—Monitoring or warning means for exhaustion or lifetime end of consumables, e.g. indication of insufficient copy sheet quantity for a job
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/06—Apparatus for electrographic processes using a charge pattern for developing
- G03G15/08—Apparatus for electrographic processes using a charge pattern for developing using a solid developer, e.g. powder developer
- G03G15/0822—Arrangements for preparing, mixing, supplying or dispensing developer
- G03G15/0865—Arrangements for supplying new developer
- G03G15/0867—Arrangements for supplying new developer cylindrical developer cartridges, e.g. toner bottles for the developer replenishing opening
- G03G15/087—Developer cartridges having a longitudinal rotational axis, around which at least one part is rotated when mounting or using the cartridge
- G03G15/0872—Developer cartridges having a longitudinal rotational axis, around which at least one part is rotated when mounting or using the cartridge the developer cartridges being generally horizontally mounted parallel to its longitudinal rotational axis
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
- G03G21/1875—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit provided with identifying means or means for storing process- or use parameters, e.g. lifetime of the cartridge
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/16—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements
- G03G21/18—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit
- G03G21/1875—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit provided with identifying means or means for storing process- or use parameters, e.g. lifetime of the cartridge
- G03G21/1896—Mechanical means for facilitating the maintenance of the apparatus, e.g. modular arrangements using a processing cartridge, whereby the process cartridge comprises at least two image processing means in a single unit provided with identifying means or means for storing process- or use parameters, e.g. lifetime of the cartridge mechanical or optical identification means, e.g. protrusions, bar codes
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Dry Development In Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
Description
図1は画像形成装置200の概略断面図である。画像形成装置200は、各色成分のトナー像を形成する4つの画像形成部Pa、Pb、Pc、及びPdが中間転写ベルト7の搬送方向に並んで配置される。画像形成部Paはイエローのトナー像を形成し、画像形成部Pbはマゼンタのトナー像を形成し、画像形成部Pcはシアンのトナー像を形成し、画像形成部Pdはブラックのトナー像を形成する。
図2は、本実施形態における画像形成装置200の制御ブロック図である。制御部600は、CPU601、ASIC602、モータ駆動回路603、EEPROM606、センサ出力検知回路607を備える。
トナーボトルTは画像形成装置200に設けられた装着部310に装着される。図3を用いて装着部310の構成について説明する。図3(a)は装着部310を正面からトナーボトルTの装着方向について見た部分正面図、図3(b)は装着部310の内部を説明するための斜視図である。なお、トナーボトルTは、図3(b)に示すように、装着部310に対して矢印M方向に装着される。この矢印M方向は、画像形成装置200の感光ドラム1の回転軸線方向と平行である。また、トナーボトルTの装着部310からの取り出し方向は、このM方向とは反対方向となる。
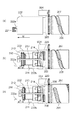
図4(a)は、装着部310に装着されたトナーボトルTの外観図である。図4(b)、及び、図4(c)は、装着部310に装着されたトナーボトルTのキャップ部222内の構造を示した概略図である。
次に、画像形成装置200に設けられた回転検知センサ203について図5、及び図6に基づいて説明する。回転検知センサ203は、発光部と、発光部から照射された光を受光する受光部とを有する光学センサである。トナーボトルTが装着部310に装着された場合、トナーボトルTが装着される方向において凸部220が形成される領域と重なる位置に、フラグ204が自重によって接触する。さらに、フラグ204は回転軸204aを中心に揺動可能に支持されている。トナーボトルTの回転に伴ってフラグ204が凸部220に押し上げられた場合、フラグ204が回転軸204aを中心に揺動し、このフラグ204は回転検知センサ203の発光部から受光部に向けて照射される光の光路を遮る遮光位置に移動する。
本実施形態においては、駆動モータ604としてDCモータ(DCブラシモータ)を用いている。駆動モータ604がトナーボトルTを回転駆動させる場合、トナーボトルTの回転速度がトナーボトルTの重量に応じて変動してしまう。つまり、トナーボトルTから現像器100にトナーを供給することにより、トナーボトルTに収容されたトナーの量が減少するので、トナーボトルTは軽くなる。そのため、PWM信号を変更せずに駆動モータ604を制御し続けた場合、トナーボトルTに収容されたトナーの量が減少することに応じて、トナーボトルTの回転速度が増加する。
そこで、1回のトナー補給動作は、ポンプ部210が最大圧縮している状態から開始し、ポンプ部210を伸長させ、その後に圧縮させ、ポンプ部210が最大圧縮した状態で終了する。この構成によれば、駆動モータ604が駆動し始めてから、ポンプ部210が圧縮し始めるまでの期間に、DCモータ(DCブラシモータ)がPWM信号に応じた回転速度に制御されるので、トナー排出量を安定させることができる。なお、ポンプ部210が最大限圧縮された状態でトナーボトルTが停止するように、カム溝214の谷領域の幅がカム溝214のピーク領域の幅に比べて広くなっている。これにより、DCモータ(DCブラシモータ)への電力供給が停止された後に駆動伝達部206が回転してしまい、ポンプ部210が伸長する可能性を低減している。
ここで、D(n+1)は次回のPWM信号の制御値、D(n)は現在のPWM信号の制御値(すなわち、ステップS106においてRAM609から読み出されたPWM信号の制御値である)、Kiは所定の比例定数、Vtgtは目標回転速度(所定速度)である。
100 現像器
203 回転検知センサ
221 ボトル有無検知センサ
310 装着部
601 CPU
602 ASIC
603 モータ駆動回路
604 駆動モータ
Claims (14)
- 感光体に形成された静電潜像を、現像剤を用いて現像する現像手段と、
現像剤を収容した収容容器が装着される装着部と、
前記装着部に収容容器が装着されたことを検知する装着検知手段と、
前記収容容器から前記現像手段に現像剤を補給するために前記装着部に装着された収容容器を回転させる駆動手段と、
前記駆動手段により回転される収容容器の回転情報を検知する回転検知手段と、
前記回転検知手段により検知された前記回転情報に基づき、前記収容容器の回転速度が所定速度となるように、前記駆動手段を制御する制御手段と、を有し、
前記制御手段は、前記装着検知手段が前記装着部に収容容器が装着されたことを検知した場合、前記収容容器の回転が所定の条件を満たすまで、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする画像形成装置。 - 前記制御手段は、前記装着部に装着された収容容器の回転情報が前記所定の条件を満たすまで、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする請求項1に記載の画像形成装置。
- 前記制御手段は、前記装着検知手段が前記装着部に収容容器が装着されたことを検知した場合、前記駆動手段が前記装着部に装着された収容容器を回転させている時間が所定時間を越えるまで、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする請求項1に記載の画像形成装置。
- 前記制御手段は、前記装着検知手段が前記装着部に収容容器が装着されたことを検知した場合、前記駆動手段により回転されている収容容器の回転回数が所定回数を終えるまで、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする請求項1に記載の画像形成装置。
- 前記回転検知手段は、前記駆動手段により回転されている収容容器の所定部分を検出する検出部を有し、
前記制御手段は、前記装着検知手段が前記装着部に収容容器が装着されたことを検知した場合、前記検出部が前記所定部分を検出した回数が所定回数を越えるまで、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする請求項1に記載の画像形成装置。 - 前記制御手段は、前記装着検知手段が前記装着部に収容容器が装着されたことを検知した場合、前記駆動手段を用いて前記収容容器を回転駆動させる補給動作を所定回数実施するまで、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする請求項1に記載の画像形成装置。
- 前記装着検知手段は、収容容器に設けられたタグの情報を取得する取得部を有し、
前記装着検知手段は、前記取得部により取得された前記タグの情報が予め記憶されたタグの情報と異なっていれば、前記装着部に収容容器が装着されたことを検知することを特徴とする請求項1乃至6のいずれか一項に記載の画像形成装置。 - 前記装着検知手段は、前記取得部により前記タグの情報が取得できなければ、前記装着部に収容容器が装着されたことを検知することを特徴とする請求項7に記載の画像形成装置。
- 前記装着部は、現像剤を収容する収容部と前記収容部の内圧を変化させるポンプ部とを有する収容容器であり、前記収容容器が回転することに応じて前記ポンプ部が伸縮し、前記収容部から前記現像手段に現像剤を供給する収容容器が装着されることを特徴とする請求項1乃至8のいずれか一項に記載の画像形成装置。
- 前記制御手段は更に、前記ポンプ部が圧縮した状態で前記駆動手段を停止させることを特徴とする請求項9に記載の画像形成装置。
- 前記制御手段は更に、収容容器から前記現像手段に現像剤を供給する動作が、前記ポンプ部が圧縮した状態から開始されなかった場合、前記回転情報に基づく前記駆動手段の制御を行わないことを特徴とする請求項9又は10に記載の画像形成装置。
- 前記回転検知手段は、前記駆動手段により回転されている収容容器の所定部分を検出する検出部を有し、
前記制御手段は、前記検出部により収容容器の前記所定部分の第1の領域が検出されてから収容容器の回転方向において前記第1の領域よりも下流の第2の領域が検出されるまでにかかる時間に基づき、前記収容容器の回転速度が前記所定速度となるように、前記駆動手段を制御することを特徴とする請求項1乃至11のいずれか一項に記載の画像形成装置。 - 前記駆動手段はDCモータであり、
前記制御手段は、前記DCモータに供給すべき電流を制御することを特徴とする請求項1乃至12のいずれか一項に記載の画像形成装置。 - 前記制御手段は、前記収容容器の回転が所定の条件を満たすまで、前記装着部に前回装着されていた収容容器の回転情報に基づいて前記制御手段により制御されていた前記電流を前記DCモータに供給することを特徴とする請求項13に記載の画像形成装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013159298A JP6173102B2 (ja) | 2013-07-31 | 2013-07-31 | 画像形成装置 |
| US14/445,899 US9291990B2 (en) | 2013-07-31 | 2014-07-29 | Image forming apparatus |
| US15/047,414 US9864299B2 (en) | 2013-07-31 | 2016-02-18 | Image forming apparatus including a developing unit to develop an electrostatic latent image on a photosensitive member |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013159298A JP6173102B2 (ja) | 2013-07-31 | 2013-07-31 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015031737A JP2015031737A (ja) | 2015-02-16 |
| JP2015031737A5 JP2015031737A5 (ja) | 2016-09-15 |
| JP6173102B2 true JP6173102B2 (ja) | 2017-08-02 |
Family
ID=52427781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013159298A Expired - Fee Related JP6173102B2 (ja) | 2013-07-31 | 2013-07-31 | 画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US9291990B2 (ja) |
| JP (1) | JP6173102B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6173102B2 (ja) * | 2013-07-31 | 2017-08-02 | キヤノン株式会社 | 画像形成装置 |
| JP6238624B2 (ja) * | 2013-07-31 | 2017-11-29 | キヤノン株式会社 | 画像形成装置 |
| JP6202952B2 (ja) * | 2013-09-06 | 2017-09-27 | キヤノン株式会社 | 画像形成装置 |
| JP6394351B2 (ja) * | 2014-03-17 | 2018-09-26 | 株式会社リコー | 粉体収容容器及び画像形成装置 |
| JP6576208B2 (ja) | 2015-10-26 | 2019-09-18 | キヤノン株式会社 | 画像形成装置 |
| JP6586916B2 (ja) * | 2016-04-07 | 2019-10-09 | 京セラドキュメントソリューションズ株式会社 | トナー容器及び画像形成装置 |
| JP6727924B2 (ja) * | 2016-05-27 | 2020-07-22 | キヤノン株式会社 | 画像形成装置 |
| JP6948119B2 (ja) * | 2016-09-30 | 2021-10-13 | キヤノンファインテックニスカ株式会社 | 回転検知機構及び画像形成装置 |
| JP6779750B2 (ja) * | 2016-11-01 | 2020-11-04 | キヤノン株式会社 | 画像形成装置 |
| JP7069623B2 (ja) * | 2017-10-05 | 2022-05-18 | 京セラドキュメントソリューションズ株式会社 | 現像剤補給装置及びこれを備えた画像形成装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030219262A1 (en) * | 2002-05-24 | 2003-11-27 | Toshiba Tec Kabushiki Kaisha | Toner supply device, toner cartridge and method for discriminating authenticity of toner cartridge |
| JP2005257792A (ja) * | 2004-03-09 | 2005-09-22 | Murata Mach Ltd | トナー補給装置 |
| JP4532986B2 (ja) * | 2004-05-19 | 2010-08-25 | キヤノン株式会社 | トナー補給容器及び画像形成装置 |
| RU2407049C2 (ru) * | 2004-11-24 | 2010-12-20 | Кэнон Кабусики Кайся | Контейнер подачи проявителя |
| EP3336610B1 (en) * | 2009-03-30 | 2019-08-21 | Canon Kabushiki Kaisha | Developer supply container and developer supplying system |
| EP2378374B1 (en) * | 2010-04-01 | 2019-09-25 | Ricoh Company, Ltd. | Powder container, powder supply assembly, and image forming apparatus |
| JP5901286B2 (ja) * | 2011-01-12 | 2016-04-06 | キヤノン株式会社 | 画像形成装置 |
| JP2013029663A (ja) * | 2011-07-28 | 2013-02-07 | Canon Inc | 画像形成装置 |
| US8653773B2 (en) * | 2012-02-02 | 2014-02-18 | Lexmark Internatonal, Inc. | Method for calibrating a drive motor for a toner metering device in an imaging apparatus |
| US9052637B2 (en) * | 2012-08-10 | 2015-06-09 | Canon Kabushiki Kaisha | Toner supply device and image forming apparatus |
| JP6173102B2 (ja) * | 2013-07-31 | 2017-08-02 | キヤノン株式会社 | 画像形成装置 |
| JP6238624B2 (ja) * | 2013-07-31 | 2017-11-29 | キヤノン株式会社 | 画像形成装置 |
-
2013
- 2013-07-31 JP JP2013159298A patent/JP6173102B2/ja not_active Expired - Fee Related
-
2014
- 2014-07-29 US US14/445,899 patent/US9291990B2/en not_active Expired - Fee Related
-
2016
- 2016-02-18 US US15/047,414 patent/US9864299B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9864299B2 (en) | 2018-01-09 |
| US9291990B2 (en) | 2016-03-22 |
| JP2015031737A (ja) | 2015-02-16 |
| US20150037051A1 (en) | 2015-02-05 |
| US20160161892A1 (en) | 2016-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6173102B2 (ja) | 画像形成装置 | |
| US9746824B2 (en) | Image forming apparatus | |
| US10191430B2 (en) | Image forming apparatus | |
| JP6202952B2 (ja) | 画像形成装置 | |
| JP2018180294A (ja) | 画像形成装置 | |
| US9008554B2 (en) | Toner supplying device | |
| JP6214287B2 (ja) | 画像形成装置 | |
| US20140193166A1 (en) | Image forming apparatus | |
| JP2019003132A (ja) | 画像形成装置 | |
| JP6779750B2 (ja) | 画像形成装置 | |
| JP5623267B2 (ja) | 画像形成装置 | |
| JP5018815B2 (ja) | 供給量管理装置、画像形成装置、供給量管理プログラム | |
| JP2021179557A (ja) | 画像形成装置、画像形成装置の制御方法、及びプログラム | |
| JP2018049229A (ja) | 画像形成装置、現像剤の補給方法 | |
| JP2018025594A (ja) | 画像形成装置 | |
| JP2019040093A (ja) | 画像形成装置 | |
| JP6576041B2 (ja) | 画像形成装置 | |
| JP2018025616A (ja) | 画像形成装置 | |
| JP2008076495A (ja) | 粉体搬送装置、及び画像形成装置 | |
| JP2018004792A (ja) | 現像装置、それを備えた現像剤補給システム及び画像形成装置 | |
| JP2020079908A (ja) | 画像形成装置 | |
| JP2019184876A (ja) | 画像形成装置及びその制御方法 | |
| JP2020086165A (ja) | 画像形成装置 | |
| JP2019184877A (ja) | 画像形成装置及びその制御方法 | |
| JP2017219754A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160725 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160725 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170526 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170704 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6173102 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |