以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
図1は、基板貼合装置10の模式的平面図である。基板貼合装置10は、大気環境部100および真空環境部300を備え、一対の基板210を貼り合わせて積層基板230を製造する。貼り合わされる基板210としては、シリコンウエハ、化合物半導体ウエハ、ガラス基板等を例示できる。また、貼り合わされる基板210は、それ自体が貼り合わせにより製造された積層構造を有する基板であってもよい。
基板貼合装置10における大気環境部100は、環境チャンバ110の内部に収容された搬送ロボット130、160、180、プリアライナ140、アライナ150、分離部170およびホルダラック190を有する。環境チャンバ110の内部は、清浄な雰囲気の温度、湿度等が管理されている。
環境チャンバ110の外側には、総合制御部112および基板カセット120が配される。総合制御部112は、受渡制御部114を含み、基板貼合装置10全体の動作を制御する。受渡制御部114は、基板貼合装置10の内部で搬送される基板210等の受け渡し動作を制御する。
基板カセット120は、貼り合わせられる基板210と、貼り合わせにより製造された積層基板230とを収容する。基板カセット120は、基板貼合装置10から単独で取り外して、基板210または積層基板230を運搬する場合の容器として使用できる。
大気環境部100において、プリアライナ140は、基板カセット120から取り出された基板210を、基板ホルダ220に保持させる。アライナ150は、互いに対向する固定ステージ151および移動ステージ152を有し、それぞれが基板ホルダ220に保持された一対の基板210を位置合わせして重ね合わせる。ホルダラック190は、使用していない基板ホルダ220を収容する。
分離部170は、基板210を貼り合わせて製造された積層基板230を基板ホルダ220から分離する。積層基板230から分離された基板ホルダ220は、ホルダラック190に格納して待機させてもよいし、プリアライナ140に搬送して次の基板210を保持させてもよい。
搬送ロボット130、160、180のそれぞれは、フィンガ132、162、182と、アーム134、164、184とを有する。フィンガ132、162、182は、基板210、基板ホルダ220および積層基板230のうちの少なくともひとつを保持する。アーム134、164、184は、フィンガ132、162、182を支持して移動させる。
基板カセット120の直近に配され、プリアライナ140、アライナ150およびホルダラック190に包囲された搬送ロボット130は、プリアライナ140に、基板ホルダ220および基板210を順次搬入する。また、搬送ロボット130は、プリアライナ140において基板210を保持した基板ホルダ220をアライナ150に搬入する。更に、搬送ロボット130は、分離部170において基板ホルダ220から分離された積層基板230を基板カセット120に搬入する。
アライナ150に対して搬送ロボット130と反対側に配された搬送ロボット160は、アライナ150において基板210を保持した基板ホルダ220を重ね合わせることにより形成された積層体201を、真空環境部300に搬送する。また、搬送ロボット160は、真空環境部300において処理された積層体201を、再び大気環境部100に搬出する。
アライナ150の図中側部に沿って配された搬送ロボット180は、搬送ロボット160により搬出された積層体201から分離部170において分離された基板ホルダ220および積層基板230を、基板カセット120側に向かって搬送する。
基板貼合装置10における真空環境部300は、ロードロック310、ロボットチャンバ320、加熱加圧部340および冷却室360を有する。ロードロック310は、大気環境部100における環境チャンバ110の内部と、真空環境部300のロボットチャンバ320の内部とを連通させる。
ロードロック310と環境チャンバ110の間は、開閉できるアクセスドア312により気密に遮断できる。また、ロードロック310とロボットチャンバ320との間は、開閉できるゲートバルブ314により気密に遮断できる。これにより、ロードロック310は、大気環境と真空環境とをそれぞれ破ることなく、環境チャンバ110と真空環境部300を連通させることができる。
ロボットチャンバ320は、個別に制御される一対の搬送ロボット330、350を有する。搬送ロボット330、350の各々は、積層体201を保持するフィンガ332、352と、フィンガ332、352を支持すると共に移動させるアーム334、354とを有する。
複数の加熱加圧部340と単一の冷却室360は、それぞれが断熱容器349、369を有して、個別にロボットチャンバ320に連通する。加熱加圧部340および冷却室360の各々とロボットチャンバ320との間は、開閉できるゲートバルブ342、362により気密に遮断できる。これにより、加熱加圧部340および冷却室360は、個別の温度環境を独立して維持できる。
加熱加圧部340は、搬入された積層体201を加熱すると共に加圧する。これにより、積層体201において重ね合わされていた基板210は、互いに貼り合わされて単一の積層基板230となる。なお、加熱加圧部340は、加熱加圧後の積層体201をある程度冷却する機能を有してもよい。これにより、加熱加圧部340から搬出される積層体201と、加熱加圧部340に搬入される積層体201とのそれぞれ生じる温度変化を抑制できる。
冷却室360は、加熱加圧部340から搬出された積層体201の温度を、大気環境部100の環境温度と略等しい温度まで冷却する。これにより、大気環境部100の熱負荷の増加を防止すると共に、真空環境部300から大気環境部100に搬入された積層体201の温度変化を抑制できる。
真空環境部300においては、搬送ロボット330、350の一方が加熱加圧部340のひとつから積層体201を搬出した場合に、搬送ロボット330、350の他方が、他の積層体201を当該加熱加圧部340に即座に搬入できる。これにより、加熱加圧部340の待機時間を短縮して、基板貼合装置10のスループットを向上させることができる。
図2は、基板貼合装置10において貼り合わせる一対の基板210の概念的な斜視図である。基板210の各々は、ノッチ214により一部が欠けた円板型の形状を有する。基板210の各々は、複数の素子領域216および複数のアライメントマーク218を有する。
ノッチ214は、基板210の結晶配向性等を示す指標として設けられる。よって、プリアライナ140においては、ノッチ214の位置を検出することにより、基板210に形成された素子領域216の方向を検知する。
素子領域216は、基板210の表面に周期的に配される。素子領域216の各々には、フォトリソグラフィ技術等により形成された半導体装置が実装される。また、素子領域216の各々には、基板210を他の基板210に貼り合わせる場合に接続端子となるパッド、バンプ等も含まれる。
基板210において、複数の素子領域216相互の間には、素子、回路等の機能的要素が配されていないブランク領域がある。ブランク領域には、基板210を素子領域216毎に切り分ける場合に切断するスクライブライン212が配される。
更に、スクライブライン212上には、貼り合わせる基板210を位置合わせする場合の指標となるアライメントマーク218が配される。スクライブライン212は、基板210を切断してダイにする過程で鋸代となって消滅するので、アライメントマーク218を設けることにより、基板210の実効的な面積が圧迫されることはない。
なお、図中では素子領域216およびアライメントマーク218を大きく描いているが、例えば直径300mmの基板210に形成される素子領域216の数は数百以上にも及ぶ場合がある。また、素子領域216に形成された配線パターン等をアライメントマーク218として利用する場合もある。
図3は、基板貼合装置10の内部で一対の基板210を貼り合わせる場合に用いられる一組の基板ホルダ220の斜視図である。基板ホルダ220の各々は、アルミナセラミックス等の硬質材料で形成され、保持する基板210に接する円形の保持面227、228と、保持面227、228の径方向外側に延在する縁部221、222と有する。
基板ホルダ220の各々において、保持面227、228には、基板210を吸着する静電チャック225、226が埋設される。これにより、基板ホルダ220は、それぞれ基板210を吸着して保持する。
また、一組の基板ホルダ220において、一方は縁部221に配された磁石片223を有し、他方は縁部222に配された磁性体片224を有する。これにより、一組の基板ホルダ220は、間に基板210を挟んで、相互に結合された状態を自律的に維持できる。
図4は、プリアライナ140単独の模式的断面図である。プリアライナ140は、載置テーブル142、位置決めピン144、押上ピン145、147およびアクチュエータ146、148を有する。
載置テーブル142は、基板ホルダ220を水平に載置できる面積を有する水平な平坦面を形成する。位置決めピン144は、載置テーブル142の縁部近傍に固定される。基板ホルダ220を載置テーブル142に載置する場合、基板ホルダ220を位置決めピン144に押し当てることにより、基板ホルダ220を載置テーブル142上の予め定めた位置に載置できる。押上ピン145、147は、アクチュエータ146、148により駆動されて、載置テーブル142の表面に直交する方向に個別に昇降する。
搬送ロボット130は、受渡制御部114の制御の下に、基板ホルダ220等を下記のような手順でプリアライナ140に搬入する。まず、フィンガ132に搭載された基板ホルダ220が載置テーブル142の上方に到達すると、受渡制御部114は、アクチュエータ146、148により駆動させて押上ピン145、147を上昇させる。
これにより、押上ピン145、147の上端は、載置テーブル142から上方に突出し、やがて、基板ホルダ220の下面に当接する。こうして、フィンガ132は基板ホルダ220の支持から開放され、基板ホルダ220は押上ピン145、147に支持される。
このように、搬送ロボット130がプリアライナ140に基板ホルダ220を搬入する場合は、搬送ロボット130から押上ピン145、147への受け渡しと、押上ピン145から載置テーブル142への受け渡しとの、2組の受渡部が形成される。受渡制御部114は、2組の受渡部のそれぞれにおける受け渡しを制御する。
なお、上記の受け渡し動作において、受渡制御部114は、押上ピン145、147の上昇と同時に、フィンガ132を下降させてもよい。また、受渡制御部114は、上端が載置テーブル142から上方に突出した状態で押上ピン145、147の上昇を停止させ、フィンガ132の下降により基板ホルダ220を押上ピン145、147に支持させてもよい。
いずれの場合も、搬送ロボット130により搬入された基板ホルダ220は、いったん押上ピン145、147に支持される。その後、受渡制御部114は、アクチュエータ146、148により押上ピン145、147を下降させる。これにより、押上ピン145、147は載置テーブル142の内部に格納され、基板ホルダ220は載置テーブル142の上面に載置される。このようにして、基板ホルダ220は、搬送ロボット130からプリアライナ140に受け渡される。
また、図4には一対の押上ピン145、147が図示されているが、押上ピン145、147は、基板210の周方向に3本以上配することが好ましい。これにより、押上ピン145、147を用いて基板210を安定に支持できる。
図5は、プリアライナ140の載置テーブル142に載置した基板ホルダ220に、更に基板210を搭載した状態を示す模式的断面図である。既に説明した通り、基板ホルダ220は、載置テーブル142の予め定められた位置に載置されている。
よって、当該基板ホルダ220に基板210を搭載することにより、搬送ロボット130の搬送精度で、基板210を基板ホルダ220に搭載できる。基板ホルダ220に搭載された基板210は、基板ホルダ220の静電チャック225、226を有効にすることにより、基板ホルダ220に保持させることができる。
基板210を保持した基板ホルダ220をプリアライナ140から搬出する場合、受渡制御部114は、まず、押上ピン145、147を上昇させて、基板ホルダ220を載置テーブル142から持ち上げる。これにより、搬送ロボット130のフィンガ132を基板ホルダ220の下に差し込むことができる。続いて、押上ピン145、147の下降およびフィンガ132の上昇の少なくとも一方の動作により、基板ホルダ220を搬送ロボット130に渡すことができる。
このように、搬送ロボット130がプリアライナ140から基板210を保持した基板ホルダ220を搬出する場合も、載置テーブル142から押上ピン145、147への受け渡しと、押上ピン145、147から搬送ロボット130への受け渡しとの、2組の受渡部が形成される。受渡制御部114は、2組の受渡部のそれぞれにおける受け渡しを制御する。
図6は、アライナ150の模式的縦断面図である。アライナ150は、枠体159と、枠体159の内側に配された固定ステージ151および移動ステージ152とを有する。
アライナ150において、固定ステージ151は、枠体159の天井面から、複数のロードセル259を介して下向きに固定される。ロードセル259は、固定ステージ151に対して下方から上方に向かってかかる負荷を検出する。固定ステージ151は、静電チャック、真空チャック等の吸着装置を有し、基板210を保持した基板ホルダ220を吸着して保持する。
また、アライナ150において、枠体159の天井面には、顕微鏡254が下向きに固定される。顕微鏡254は、下方に位置する移動ステージ152に保持された基板210のアライメントマーク218を観察できる。顕微鏡254と固定ステージ151との相対位置は変化しないので、顕微鏡254を用いて、固定ステージ151に保持された基板210と、移動ステージ152に保持された基板210との位置ずれを精度よく検出できる。
移動ステージ152は、粗動部251、微動部252および昇降部253を介して、枠体159の底面から支持される。
粗動部251は、枠体159の内側を、略幅いっぱいに高速に移動できる。これにより、粗動部251は、図中に矢印で示すX方向に移動ステージ152を移動させることができる。これにより、移動ステージ152は、上方が開放された位置と、固定ステージ151に対向する位置との間を移動する。
また、粗動部251は、図中に矢印で示すY方向にも移動ステージ152を移動させることができる。これにより、移動ステージ152に保持された基板210のアライメントマーク218が顕微鏡254の視野に入る位置まで、移動ステージ152を高速に移動させることができる。
アライナ150において、微動部252は、粗動部251に対して、移動ステージ152を、図中に矢印で示すX方向およびY方向に、制御精度よく移動させることができる。よって、顕微鏡254により検出した基板210の位置ずれを精度よく補償できる。
なお、移動ステージ152は、球面座を介して昇降部253から支持される。よって、移動ステージ152は、図中に矢印で示すX方向、Y方向およびZ方向への並進運動の他に、X軸、Y軸およびZ軸の廻りに回転運動させることもできる。
なお、粗動部251には、押上ピン255、257が設けられる。押上ピン255、257は、アクチュエータ256、258により駆動されて個別に昇降する。上昇した押上ピン255、257の上端は、移動ステージ152を貫通して、移動ステージ152の上面から上方に突出する。
搬送ロボット130が、基板210を保持した基板ホルダ220を移動ステージ152に載置する場合、受渡制御部114の制御の下に押上ピン255、257が次のように動作する。フィンガ132に搭載された基板ホルダ220が載置テーブル142の上方に到達すると、受渡制御部114は、アクチュエータ256、258を動作させて押上ピン255、257を上昇させる。
これにより、押上ピン255、257の上端は、移動ステージ152から上方に突出し、やがて、基板ホルダ220の下面に当接する。フィンガ132は基板ホルダ220の支持から開放され、基板ホルダ220は押上ピン255、257により支持される。
このように、基板210を保持した基板ホルダ220を搬送ロボット130がアライナ150に搬入する場合は、搬送ロボット130から押上ピン255、257への受け渡しと、押上ピン255、257から移動ステージ152への受け渡しとの、2組の受渡部が形成される。受渡制御部114は、2組の受渡部のそれぞれにおける受け渡しを制御する。
なお、上記の動作において、受渡制御部114は、押上ピン255、257の上昇と同時に、フィンガ132を下降させてもよい。また、受渡制御部114は、上端が移動ステージ152から上方に突出した状態で押上ピン255、257の上昇を停止させ、フィンガ132の下降により基板ホルダ220を押上ピン255、257に支持させてもよい。
いずれの場合も、搬送ロボット130により搬入された基板ホルダ220は、いったん押上ピン255、257に支持される。その後、受渡制御部114は、アクチュエータ256、258により押上ピン255、257を下降させる。
これにより、押上ピン255、257は移動ステージ152の内部に格納され、基板ホルダ220は移動ステージ152の上面に載置される。図示の例では、磁性体片224を有する基板ホルダ220が移動ステージ152に保持される。このようにして、基板ホルダ220は、搬送ロボット130からアライナ150に受け渡される。
なお、基板210を保持した基板ホルダ220を、下向きに固定された固定ステージ151に保持させる場合は、例えば、次の手順を実行する。基板ホルダ220は、フィンガ132を反転させることにより、下向きの保持面227に基板210を保持した状態で搬送ロボット130により移動ステージ152上に搬入される。受渡制御部114は、上昇させた押上ピン255、257の上端により基板ホルダ220の縁部221を支持させる。
更に、受渡制御部114は、上昇した押上ピン255、257が基板ホルダ220を支持し、基板ホルダ220および基板210が移動ステージ152の上面から浮いた状態を維持したまま粗動部251を動作させる。これにより、基板ホルダ220は、固定ステージ151の直下まで移動される。
次に、受渡制御部114は、押上ピン255、257を更に上昇させて、基板ホルダ220を固定ステージ151に当接させる。この状態で、固定ステージ151の吸着装置を動作させることにより、固定ステージ151は、下向きに基板210を保持した基板ホルダ220を保持できる。図示の例では、磁石片223を有する基板ホルダ220が固定ステージ151に保持される。
なお、図6には一対の押上ピン255、257が図示されているが、押上ピン255、257は、基板210の周方向に3本以上配することが好ましい。これにより、押上ピン255、257を用いて基板210を安定に支持できる。
図7は、アライナ150の模式的断面図である。アライナ150において、昇降部253は、図中に矢印で示すZ方向に移動ステージ152を昇降させる。これにより、移動ステージ152に保持された基板210を、固定ステージ151に保持された基板210に対して接近させて重ね合わせることができる。こうして、重ね合わされた一対の基板210を一対の基板ホルダ220で挟んだ積層体201が形成される。
積層体201は、移動ステージ152を下降させて固定ステージ151から離間させた上で搬送ロボット160に受け渡され、アライナ150から搬出される。この場合も、受渡制御部114は、まず、押上ピン255、257を上昇させて、積層体201を移動ステージ152から持ち上げる。
これにより、積層体201と移動ステージ152との間に搬送ロボット160のフィンガ162を差し込むことができる。続いて、押上ピン255、257の下降およびフィンガ162の上昇の少なくとも一方の動作により、積層体201を搬送ロボット160に渡すことができる。
このように、アライナ150から搬送ロボット160が積層体201を搬出する場合は、移動ステージ152から押上ピン255、257への受け渡しと、押上ピン255、257から搬送ロボット160への受け渡しとの、2組の受渡部が形成される。受渡制御部114は、2組の受渡部のそれぞれにおける受け渡しを制御する。
図8は、ロードロック310の模式的断面図である。ロードロック310は、載置テーブル311、アクセスドア312、ゲートバルブ314、押上ピン315、317、アクチュエータ316、318および気密室319を有する。
ロードロック310において、載置テーブル311は、水平な平坦面を有し、積層体201を水平に載置できる面積を有する。押上ピン315、317は、アクチュエータ316、318により駆動され、載置テーブル311の表面に対して直角な方向に、個別に昇降する。上昇した押上ピン315、317の上端は、載置テーブル311の上面から上方に突出する。
気密室319は、個別に開閉するアクセスドア312およびゲートバルブ314を有して、載置テーブル311を内包する。気密室319は、アクセスドア312およびゲートバルブ314の両方を閉じた状態で、給排気路313を通じて排気または給気することにより、内部を真空環境にすることも大気環境にすることもできる。
気密室319の内部が大気環境の場合、ゲートバルブ314を閉じたままアクセスドア312を開くことにより、気密室319と大気環境部100と連通させることができる。これにより、搬送ロボット160により、大気環境部100の環境を維持したまま、気密室319に積層体201を搬入または搬出できる。
また、気密室319の内部が真空環境の場合、アクセスドア312を閉じたままゲートバルブ314を開くことにより、気密室319を真空環境部300に連通させることができる。これにより、搬送ロボット330、350により、真空環境部300の環境を維持したまま、真空環境部300側から気密室319内に積層体201を搬入または搬出できる。
搬送ロボット160、350が載置テーブル311に積層体201を載置する場合、受渡制御部114の制御の下に押上ピン315、317が次のように動作する。フィンガ162、352に搭載された積層体201が載置テーブル311の上方に到達すると、受渡制御部114は、アクチュエータ316、318により押上ピン315、317を上昇させる。
これにより、押上ピン315、317の上端は、載置テーブル311から上方に突出して積層体201の下面に当接する。よって、フィンガ162、352は積層体201の支持から開放され、積層体201は押上ピン315、317に支持される。
なお、上記の動作において、受渡制御部114は、押上ピン315、317の上昇と同時に、フィンガ162、352を下降させてもよい。また、受渡制御部114は、上端が載置テーブル311から上方に突出した状態で押上ピン315、317の上昇を停止させ、フィンガ162、352の下降により積層体201を押上ピン315、317に支持させてもよい。
いずれの場合も、搬送ロボット160、350により搬入された積層体201は、いったん押上ピン315、317に支持される。その後、受渡制御部114は、アクチュエータ316、318により押上ピン315、317を下降させる。これにより、押上ピン315、317は載置テーブル311の内部に格納され、積層体201は載置テーブル311の上面に載置される。このようにして、積層体201は、搬送ロボット160、350からロードロック310に受け渡される。
また、積層体201をロードロック310から搬出する場合、受渡制御部114は、まず、押上ピン315、317を上昇させて、積層体201を載置テーブル311から持ち上げる。これにより、搬送ロボット160、330のフィンガ162、332を積層体201の下に差し込むことができる。続いて、押上ピン315、317の下降およびフィンガ162、332の上昇の少なくとも一方の動作により、積層体201を搬送ロボット160、330に渡すことができる。
このように、ロードロック310に積層体201を搬入または搬出する場合は、それぞれ、搬送ロボット160、330、350および押上ピン315、317の受け渡しと、押上ピン315、317および載置テーブル311の受け渡しとの、2組の受渡部が形成される。受渡制御部114は、2組の受渡部のそれぞれにおける受け渡しを制御する。
なお、図8には一対の押上ピン315、317が図示されているが、押上ピン315、317は、積層体201の周方向に3本以上配することが好ましい。これにより、押上ピン315、317を用いて積層体201を安定に支持できる。
図9は、加熱加圧部340の模式的断面図である。加熱加圧部340は、加圧部341、ゲートバルブ342、一対の加熱モジュール343、押下装置344、押上ピン345、347、アクチュエータ346、348および断熱容器349を有する。
ロードロック310から搬送ロボット330により搬送された積層体201は、開いたゲートバルブ342から加熱加圧部340に搬入される。搬入された積層体201は、一対の加熱モジュール343の間に挟まれる。
加熱加圧部340において、積層体201に対して図中下側の加熱モジュール343は、断熱容器349の底部に対して固定され、積層体201を下方から支持する。また、図中上側の加熱モジュール343は、加圧部341により生じた押し下げ力を図中上面から積層体201に作用させる。
更に、一対の加熱モジュール343の各々は、ヒータコアを内蔵して、挟んだ積層体201を加熱する。これにより、積層体201は加熱下で加圧され、一対の基板ホルダ220の間に挟まれた状態で重ね合わされた基板210は、互いに貼り合わされて積層基板230となる。
加熱加圧部340において、図中上側の加熱モジュール343には押下装置344が内蔵される。押下装置344は、押下ピンの下端を上側の加熱モジュール343から下方に向かって突き出すことができる。これにより、加熱および加圧により上側の加熱モジュール343に貼り付いた積層体201を押し剥がすことができる。
また、図中下側の加熱モジュール343には押上ピン345、347およびアクチュエータ346、348が配される。押上ピン345、347は、アクチュエータ346、348により駆動されて個別に昇降する。上昇した押上ピン345、347の上端は、下側の加熱モジュール343上面から上方に突出する。
搬送ロボット330が加熱モジュール343に積層体201を載置する場合、受渡制御部114の制御の下に押上ピン345、347が次のように動作する。フィンガ332、に搭載された積層体201が加熱モジュール343の上方に到達すると、受渡制御部114は、アクチュエータ346、348により押上ピン345、347を上昇させる。
これにより、押上ピン345、347の上端は、加熱モジュール343から上方に突出して積層体201の下面に当接する。よって、フィンガ332は積層体201の支持から開放され、積層体201は押上ピン345、347に支持される。
上記の動作において、受渡制御部114は、押上ピン345、347の上昇と同時に、フィンガ332を下降させてもよい。また、受渡制御部114は、上端が加熱モジュール343から上方に突出した状態で押上ピン345、347の上昇を停止させ、フィンガ332の下降により積層体201を押上ピン345、347に支持させてもよい。
いずれの場合も、搬送ロボット330により搬入された積層体201は、いったん押上ピン345、347に支持される。その後、受渡制御部114は、アクチュエータ346、348により押上ピン345、347を下降させる。これにより、押上ピン345、347は加熱モジュール343の内部に格納され、積層体201は加熱モジュール343の上面に載置される。このようにして、積層体201は、搬送ロボット330から加熱加圧部340に受け渡される。
また、積層体201を加熱加圧部340から搬出する場合、受渡制御部114は、まず、押上ピン345、347を上昇させて、積層体201を加熱モジュール343から持ち上げる。これにより、搬送ロボット350のフィンガ352を積層体201の下に差し込むことができる。続いて、押上ピン345、347の下降およびフィンガ352の上昇の少なくとも一方の動作により、積層体201を搬送ロボット350に渡すことができる。
このように、加熱加圧部340に積層体201を搬入または搬出する場合は、それぞれ、搬送ロボット330、350および押上ピン345、347の受け渡しと、押上ピン345、347および加熱モジュール343の受け渡しとの、2組の受渡部が形成される。受渡制御部114は、2組の受渡部のそれぞれにおける受け渡しを制御する。
なお、図9には一対の押上ピン345、347が図示されているが、押上ピン345、347は、積層体201の周方向に3本以上配することが好ましい。これにより、押上ピン345、347を用いて積層体201を安定に支持できる。
また、真空環境部300においては、冷却室360においても、搬送ロボット330、350と積層体201を受け渡しする受渡部が形成される。この受渡部における受け渡しも受渡制御部114の制御対象となる。
図10、図11、図12および図13は、基板貼合装置10における基板210の積層基板230への変遷を、段階を追って示す図である。これらの図面を参照しつつ、基板貼合装置10の動作を説明する。
図10に示すように、貼り合わせる基板210の各々は、プリアライナ140において、1枚ずつ基板ホルダ220に搭載される。この段階では、基板210は、静電チャック225、226の静電力により基板ホルダ220に保持される。よって、基板210が基板ホルダ220に対して位置ずれを生じる可能性は低い。ただし、基板210は、基板ホルダ220に接着されているわけではないので、静電チャック225、226への給電が途切れた場合等には、基板210が位置ずれを生じる場合があり得る。
プリアライナ140において基板210を保持した基板ホルダ220は、搬送ロボット130によりアライナ150に搬入される。アライナ150においては、固定ステージ151に保持された基板ホルダ220と、移動ステージに保持された基板ホルダ220とが、図11に示すように互いに対向する。これにより、貼り合わされる一対の基板210も互いに対向する。
引き続きアライナ150においては、一対の基板210が、位置合わせされた上で重ね合わされる。これにより、図12に示すように、一対の基板210および一対の基板ホルダ220により積層体201が形成される。積層体201において、一対の基板ホルダ220は、互いに吸着する磁石片223および磁性体片224により結合され、重ね合わされた一対の基板210の相対位置を維持する。
アライナ150から搬出された段階の積層体201において、一対の基板210は重ね合わされているに過ぎず、貼り合わされてはいない。よって、積層体201が外部から衝撃を受けた場合に、一対の基板210が位置ずれを生じる場合がある。
これに対して、加熱加圧部340において加熱加圧された積層体201では、一対の基板210が相互に貼り合わされて積層基板230を形成する。よって、以降の過程で基板210が相互に位置ずれを生じることはない。積層基板230となった基板210は、図13に示すように、分離部170において基板ホルダ220から分離され、基板カセット120に収納される。
なお、上記の例では、磁石片223を有する基板ホルダ220を上側に、磁性体片224を有する基板ホルダ220を下側に描いている。しかしながら、基板ホルダ220の配置はこれに限られない。また、一対の基板ホルダ220を結合する部材は、磁石片223および磁性体片224の組み合わせに限られるわけではなく、一対の基板ホルダ220を弾性的に挟んで保持するクリップ等を用いることもできる。
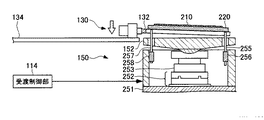
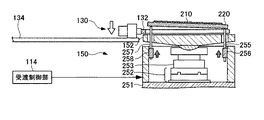
図14は、受渡制御部114の制御手順を示す流れ図である。また、図15から図21までは、搬送ロボット130が、基板210を保持した基板ホルダ220をアライナ150の移動ステージ152に搬入する様子を段階的に示す図である。
図14に示す手順に沿って受渡制御部114の制御手順を説明しつつ、図15から図21までのいずれかを随時参照する。なお、図15から図21におけるアライナ150は、微動部252から移動ステージ152までを抜き出して示す。
図14に示すように、搬送ロボット130からアライナ150へ基板ホルダ220の受け渡しが開始されると、受渡制御部114は、まず、搬送ロボット130が搬送している基板ホルダ220の個体情報を総合制御部112から取得する(ステップS101)。
基板ホルダ220の各々は、バーコード等の個体識別情報を有する。また、総合制御部112は、個々の基板ホルダ220の重量、使用時間等の個体情報を保持している。よって、受渡制御部114から問い合わせがあった場合、総合制御部112は、搬送ロボット130がアライナ150に受け渡す基板ホルダ220の個体情報を提供できる。
受渡制御部114は、例えば、総合制御部112から取得した基板ホルダ220の重量に基づいて、搬送ロボット130のフィンガ132における受渡面を特定する(ステップS102)。即ち、フィンガ132は、アーム134から片持ち構造で支持されている。このため、フィンガ132は、図15に一点鎖線Aで示すように、搭載された基板ホルダ220の重量に応じて傾斜した状態で基板ホルダ220をアライナ150に渡す。
このようなフィンガ132の傾きは、基板ホルダ220の個体情報から抽出した基板ホルダ220の重量により推定できる。よって、受渡制御部114は、基板ホルダ220がアライナ150の移動ステージ152に渡される時点のフィンガ132の傾斜を受渡面として特定する。
次に、受渡制御部114は、図15に示すように、フィンガ132から基板ホルダ220を受け取る押上ピン255、257を個別に上昇させて、押上ピン255、257に受渡面を形成させる。このように、押上ピン255、257は、いずれかの昇降により受渡面を変化させることができる。
ここで形成される押上ピン255、257の受渡面は、例えば、受渡制御部114が、受け渡す基板ホルダ220の個体情報に基づいて推定したフィンガ132の傾きに合わせて設定される。
このように、受渡制御部114は、基板ホルダ220の個体を識別して、当該基板ホルダ220の既知の重量に基づいて受渡面を変化させることができる。
こうして、図中に一点鎖線Bで示す通り、押上ピン255、257が形成する受渡面は、ステップS101で特定されたフィンガ132の受渡面と平行になりる(ステップS103)。このように、押上ピン255、257が形成する受渡面は、搬送ロボット130が形成する受渡面に整合される。
続いて、受渡制御部114は、図16に示すように、フィンガ132を前進させて、基板ホルダ220を移動ステージ152の上方に移動させる(ステップS104)。この段階では、フィンガ132は、押上ピン255、257の上端よりも更に上方を通過する。よって、フィンガ132および基板ホルダ220と、押上ピン255、257とは接触しない。
次に、受渡制御部114は、図17に示すように、フィンガ132を下降させる(ステップS105)。これにより、基板ホルダ220は、押上ピン255、257の上端に上方から接近し、やがて、基板ホルダ220の下面が押上ピン255、257の上端に当接する。
既に説明した通り、押上ピン255、257の上端は、フィンガ132の受渡面と平行な受渡面をなす。このため、フィンガ132に伴って下降した基板ホルダ220の下面は、複数の押上ピン255、257上端に対して同時に当接する。
よって、基板ホルダ220と押上ピン255、257とが当接する場合に生じる衝撃は、複数の押上ピン255、257において均等に生じ、基板ホルダ220の一部に大きな衝撃が生じる片当たりが抑制される。これにより、基板ホルダ220および押上ピン255、257の当接が、基板ホルダ220と基板210との位置ずれを生じることが防止される。
更に、受渡制御部114は、図18に示すように、フィンガ132を引き続き下降させる。これにより、基板ホルダ220は押上ピン255、257に支持され、基板ホルダ220の支持から開放されたフィンガ132は、基板ホルダ220の下面から離間する。こうして、基板210を保持した基板ホルダ220は、搬送ロボット130のフィンガ132からアライナ150の押上ピン255、257に受け渡される。
続いて、受渡制御部114は、図19に示すように、フィンガ132を後退させ、基板ホルダ220および移動ステージ152の間から引き抜く(ステップS106)。こうして、搬送ロボット130は、基板210を保持した基板ホルダをアライナ150に引き渡して、受渡制御部114の制御から開放される。
次に、受渡制御部114は、図20に示すように、アクチュエータ256、258を個別に動作させ、押上ピン255、257上端の高さを揃える(ステップS107)。これにより、押上ピン255、257に支持された基板ホルダ220は水平になる。押上アライナ150の移動ステージ152は水平な状態で待機しているので、押上ピン255、257の形成する受渡面は、移動ステージ152の受渡面に整合される。
続いて、受渡制御部114は、アクチュエータ256、258を同時に動作させて、基板ホルダ220を、水平を保ちつつ下降させる(ステップS108)。これにより、図21に示すように、基板ホルダ220の下面は、やがて、移動ステージ152の上面に着地する(ステップS109)。
ここで、基板ホルダ220の下面と移動ステージ152の上面は、互いに平行な状態で当接するので、局部的に大きな衝撃が生じる片当たりが抑制される。よって、基板ホルダ220および移動ステージ152の当接が、基板ホルダ220と基板210との位置ずれを生じることが防止される。
更に、受渡制御部114は、引き続きアクチュエータ256、258の動作を継続し、押上ピン255、257を移動ステージ152に格納する(ステップS110)。こうして、搬送ロボット130からアライナ150への基板ホルダ220の受け渡しが終了する。
このように、受渡部を形成する搬送ロボット130およびアライナ150の少なくとも一方は、受渡面を変化させることにより、受渡面を相互に整合させることができる。これにより、受け渡しに係る基板210および基板ホルダ220への衝撃を緩和し、位置ずれ等を防止できる。
なお、上記の例では、押上ピン255、257から移動ステージ152へ基板ホルダ220を受け渡す場合に、押上ピン255、257の受渡面をいったん水平にした後(ステップS107)押上ピン255、257を一斉に下降させた(ステップS108、108)。しかしながら、例えば、押上ピン255、257が、フィンガ132から基板ホルダ220を受け取ってから移動ステージ152に渡すまでの間、押上ピン255、257の下降量を個別に制御して、受け渡しの過程で生じるフィンガ132の受渡面の変化に追従して押上ピン255、257の受渡面を変化させてもよい。
また、上記の例では、基板ホルダ220の搬送方向について押上ピン255、257の上流側に位置するフィンガ132の受渡面に対しても、下流側に位置する移動ステージ152の受渡面に対しても、押上ピン255、257の受渡面を変化させることにより受渡面を整合させた。このように、受渡面を変化させることができるデバイスの前後であれば、受渡面が固定されたデバイスを配置しても、上記のような制御手順を実行できる。
更に、上記の例では、受渡制御部114は、基板ホルダ220の個体情報を取得して整合させる受渡面を特定した。しかしながら、例えば、フィンガ132に荷重検出部を設け、フィンガ132に搭載した基板210および基板ホルダ220の重量を検出し、その検出結果に応じて、受渡制御部114が整合すべき受渡面を変化させてもよい。このような態様によれば、基板ホルダ220の個体差に加えて、基板210の重量のばらつきも含めて受渡面を整合させることができる。
また、押上ピン255、257の各々に負荷を検出するロードセル等のセンサを設け、押上ピン255、257が均等な荷重を受けるべく、受渡制御部114が受渡面を変化させてもよい。この場合も、基板ホルダ220の個体差に加えて、基板210の重量のばらつきも含めて受渡面を整合させることができる。
更に、基板210および基板ホルダ220を搬送する搬送ロボット130を駆動するアクチュエータの負荷を検出し、受渡制御部114が、当該負荷の大きさに基づいて、押上ピン255、257が形成する受渡面を変化させてもよい。この場合も、基板ホルダ220の個体差に加えて、基板210の重量のばらつきも含めて受渡面を整合させることができる。
図22から図24までは、押上ピン255、257から移動ステージ152への基板ホルダ220の受け渡しに関する他の態様を、段階を追って示す図である。図22から図24に示す基板ホルダ220の受け渡し手順は、図19、図20および図21に示した段階に置き換えて実行できる。
図14に示したステップS106において、フィンガ132から押上ピン255、257への基板ホルダ220の受け渡しが完了すると、受渡制御部114は、図22に示すように、移動ステージ152を揺動させて、移動ステージ152の上面を、押上ピン255、257に支持された基板ホルダ220下面と平行にする。これにより、押上ピン255が形成する受渡面と、移動ステージ152が形成する受渡面とが整合される。
続いて、受渡制御部114は、図23に示すように、押上ピン255、257を同時に下降させて、基板ホルダ220を下方に平行移動する。これにより、基板ホルダ220はやがて、移動ステージ152の上面に当接する。
ここで、基板ホルダ220は、その下面全体が移動ステージ152上面に略同時に当接する。よって、基板ホルダ220または移動ステージ152の一部に大きな衝撃が生じる片当たりが抑制され、基板ホルダ220および移動ステージ152の当接により基板ホルダ220と基板210との位置ずれを生じることが防止される。このように、受渡制御部114は、基板210および基板ホルダ220を搭載した移動ステージ152を揺動させることにより受渡面を変化させてもよい。
次に、受渡制御部114は、図24に示すように、移動ステージ152の傾きを水平に戻す。こうして、図21に示した場合と同様に、片当たりさせることなく、基板ホルダ220を移動ステージ152に着地させることができる。このように、基板貼合装置10においては、押上ピン255、257が移動ステージ152に基板ホルダ220を受け渡す場合に、移動ステージ152側の受渡面を、押上ピン255、257側の受渡面に対して整合させることによっても、基板210および基板ホルダ220の片当たりを防止できる。
図25は、搬送ロボット160におけるフィンガ162を示す図である。搬送ロボット160は、基板貼合装置10においてアライナ150とロードロック310との間に配され、アライナ150から積層体201を搬出する。また、搬送ロボット160は、ロードロック310への積層体201の搬入と、ロードロック310からの積層体201の搬出も担う。
搬送ロボット130について既に説明した通り、搬送ロボット160のフィンガ162も搭載荷重に応じて傾斜が変化する。更に、搬送ロボット160は、2枚の基板ホルダ220を含む積層体201を搭載するので、無負荷の場合と積層体201を搭載した場合とのフィンガ162の傾斜の変化が大きい。そこで、搬送ロボット160のフィンガ162は、無負荷の場合に、荷重がかかった場合の傾斜とは逆の傾斜が生じるように調整されている。
図26は、上記のようなフィンガ162に、積層体201が搭載された状態を示す。フィンガ162は、無負荷の状態で予め反対の傾斜を有しているので、積層体201が搭載された場合に生じる傾斜が抑制される。よって、高さ方向の余裕が限られた空間においても、積層体201を搭載した状態で、周囲に十分な間隔を確保できる。
なお、図示の例では、無負荷の場合に、積層体201を搭載した場合に対して、水平線について対称な傾斜がフィンガ162に生じるように調整されている。しかしながら、フィンガ162の初期状態が上記のような傾斜に限られるわけではない。例えば、積層体201が搭載された場合に、フィンガ162が略水平になるように調整してもよい。
このように、受け渡しに係るフィンガ162が積層体201を保持した場合の保持面を、受け渡しに係る他のデバイスの受渡面に合わせることにより、受渡面を受動的に整合させることができる。これにより、受渡制御部114の負担を軽減できる。
また、受け渡しに係る他のデバイスの受渡面を、受け渡しに係るフィンガ162が積層体201を保持した場合の保持面と、当該フィンガ162が無負荷の場合の受渡面との中間に整合するようにしてもよい。これにより、保持面を能動的に整合させない場合であっても、受け渡しに係る衝撃を緩和できる。
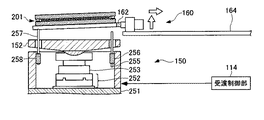
図27は、上記のようなフィンガ162を有する搬送ロボット160により、アライナ150から積層体201を搬出する場合について、受渡制御部114の制御手順を示す流れ図である。また、図28から図33までは、搬送ロボット160が、積層体201をアライナ150の移動ステージ152から搬出する様子を段階的に示す図である。
図27に示す手順に沿って受渡制御部114の制御手順を説明しつつ、図28から図33までのいずれかを随時参照する。なお、図28から図33におけるアライナ150は、微動部252から移動ステージ152までを抜き出して示す。
図27に示すように、アライナ150から搬送ロボット160へ積層体201の受け渡しが開始されると、受渡制御部114は、まず、移動ステージ152を水平に戻す(ステップS201)。これにより、移動ステージ152の受渡面が、押上ピン255、257が形成する受渡面に整合される。
次に、受渡制御部114は、アクチュエータ256、258を動作させて、押上ピン255、257を一斉に上昇させる(ステップS202)。これにより、押上ピン255、257が形成する受渡面は、水平状態を保ったまま、上方に平行移動する。
これにより、押上ピン255、257の上端が積層体201の下面に当接する。更に、受渡制御部114が押上ピン255、257の上昇を継続させることにより、図29に示すように、積層体201は、移動ステージ152から押上ピン255、257に受け渡され、押上ピン255、257により支持される状態になる(ステップS203)。
押上ピン255、257の上端は、移動ステージ152の受渡面と平行な受渡面をなす。このため、押上ピン255、257は、積層体201の下面に対して均等に当接する。よって、積層体201と押上ピン255、257とが当接した場合に、局部的に大きな衝撃が生じる片当たりが抑制される。これにより、基板ホルダ220とフィンガ162との当接が、積層体201における基板210の位置ずれを生じることが防止される。
次に、受渡制御部114は、アクチュエータ256、258を個別に動作させて、押上ピン255、257の上端が形成する受渡面を、搬送ロボット160のフィンガ162の受渡面に整合させる(ステップS204)。これにより、図30に示すように、積層体201の受渡面は、図中に一点鎖線Cで示す、無負荷状態のフィンガ162における受渡面と平行になる。
続いて、受渡制御部114は、フィンガ162を前進させて(ステップS205)、図31に示すように、移動ステージ152と積層体201との間にフィンガ162を差し込む。これにより、積層体201の下面に位置する受渡面は、フィンガ162の上面と、対向した状態になる。
更に、受渡制御部114は、フィンガ162を上昇させる(ステップS206)。これにより、図32に示すように、フィンガ162は、積層体201の下面に全体に当接する。
押上ピン255、257の上端は、フィンガ162の受渡面と平行な受渡面をなすので、フィンガ162は、積層体201の下面に対して全体に均等に当接する。よって、積層体201と押上ピン255、257とが当接した場合に、局部的に大きな衝撃が生じる片当たりが抑制され、基板ホルダ220とフィンガ162との当接が、積層体201における基板210の位置ずれを生じることが防止される。
次に、受渡制御部114は、フィンガ162を更に上昇させ(ステップS207)、積層体201を押上ピン255、257から離間させる。更に、受渡制御部114は、押上ピン255、257から離間した積層体201を搭載したフィンガ162を後退させる。こうして、積層体201は、アライナ150から搬出される。よって、受渡制御部114は、積層体201の搬出に係る制御手順を終了する。
このように、個別に昇降できる押上ピン255、257を有するアライナ150に対しては、基板210を保持した基板ホルダ220を搬入する場合も、積層体201を搬出する場合も、受渡面を整合させて搬送物を受け渡すことができる。よって、基板貼合装置10においては、重ね合わされてはいても、未だ貼り合わされていない基板210等の位置ずれを防止して、積層基板230を歩留りよく製造できる。
上記のような受け渡しの手順は、押上ピン315、317を個別に昇降できる場合には、ロードロック310における積層体201の受け渡しにおいても実行できる。また、押上ピン345、347を個別に昇降できる場合には、加熱加圧部340に対する積層体201の搬入および搬出においても、上記の受け渡し手順を実行できる。
更に、受渡面を変化させるデバイスを有していれば、基板貼合装置10において基板210および基板ホルダ220の搬送に関与する他の要素、例えば、冷却室360、分離部170等においても、上記の受け渡し手順を実行できる。また更に、個別に昇降できるピン、揺動できるステージ等のように、受渡面を変化させることができるハードウェアを基板貼合装置10が備えていれば、通信回線、記録媒体等を通じてインストールするプログラムとして上記の受け渡し手順を実装することもできる。
なお、上記の態様では、押上ピン145、147、255、257、315、317、345、347を個別に昇降させることにより受渡面を変化させて、受渡面を整合させた。しかしながら、基板210等を押上ピン145、147、255、257、315、317、345、347と受け渡しする他のデバイス、例えば、アライナ150の移動ステージ152を揺動させることによっても、受渡面を整合させることができる。
また、上記の態様では、搬送ロボット130、160、180、330、350のフィンガ132、162、182、332、352は、受動的に受渡面を形成していた。しかしながら、アクチュエータによりフィンガ132、162、182、332、352の受渡面を能動的に変化させて、受け渡しに係る受渡面を整合させてもよい。
更に、上記の基板貼合装置10においては、アライナ150において重ね合わせた基板210を加熱加圧部340において貼り合わせることにより積層基板230とした。しかしながら、例えば、基板210を鏡面研磨することにより、加熱加圧なしアライナ150における重ね合わせで積層基板230とすることもできる。また、接着剤を用いて基板210を貼り合わせることにより積層基板230を形成することもできる。
図34は、押上ピン145、147、255、257、315、317、345、347として用いることができる部材の先端部401を示す断面図である。図示の先端部401において、金属等の硬質な材料により形成されたピン本体410の図中上端には、キャップ部420が装着されている。
キャップ部420は、シリコンゴム等のように弾性を有するエラストマ材料により形成され、ベローズ部422、通気穴424、スリーブ部426および嵌合部428を有する。ベローズ部422は、図中縦方向のキャップ部420の剛性を低下させる。これにより、先端部401に基板ホルダ220等を載せた場合に、ベローズ部422は、図中縦方向には容易に変形するが、図中横方向には変形が抑制される。
通気穴424は、キャップ部420の内外を連通させ、温度変化等によりキャップ部420の弾性率が変化することを防止する。スリーブ部426は、ピン本体410の端部と相補的な形状を有し、キャップ部420を、ピン本体410に対して位置決めする。更に、嵌合部428は、ピン本体410の外周に形成された溝と嵌合して、キャップ部420がピン本体410から抜けることを防止する。
上記のような先端部401を備える押上ピン145、147、255、257、315、317、345、347を用いた場合、基板ホルダ220または積層体201に当接した場合の衝撃を受動的に緩和できる。よって、複雑な制御なしに、積層体201等にかかる衝撃を緩和して、基板210の位置ずれを防止できる。
図35は、押上ピン145、147、255、257、315、317、345、347として用いることができる他の部材の先端部402を示す断面図である。図示の先端部402は、ピン本体430の図中上端近傍に、付勢部材440および先端部材450を有する。先端部材450は、ピン本体430よりも細く、ピン本体430の長手方向に形成された穴の内部に収容される。これにより、先端部材450は、ピン本体430に対して、長手方向に限って移動できる。ただし、先端部材450は、付勢部材440により図中上方に向かって付勢されている。
また、先端部材450は、図中上端側から順に、細径部452、テーパ部454および大径部456を有する。細径部452は、ピン本体430から外部に露出して、先端部402の上端に位置する。大径部456は、ピン本体430の内部に収容される。テーパ部454は、細径部452および大径部456を滑らかに結合する。
ピン本体430の図中上端は、縮径されてかしめ部432を形成する。これにより、付勢部材440に付勢された先端部材450が、ピン本体430から抜け出ることを防止している。
上記のよう構造を有する先端部402を備える押上ピン145、147、255、257、315、317、345、347を用いた場合、基板ホルダ220または積層体201に当接した場合の衝撃を受動的に緩和できる。また、先端部材450は、先端部402の長手方向に限って変位するので、先端部402の伸縮により、押上ピン145、147、255、257、315、317、345、347が支持する積層体201等の位置が変化することが防止される。このように、受渡面にかかる荷重により弾性変形するキャップ部420、先端部材450等を設けて、キャップ部420の弾性変形により、受渡面を自律的に整合させてもよい。
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
特許請求の範囲、明細書、および図面中において示した装置、システム、プログラム、および方法における動作、手順、ステップ、および段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を、後の処理で用いる場合でない限り、任意の順序で実現しうることに留意されたい。特許請求の範囲、明細書、および図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。