JP6128317B2 - ブレーキ装置 - Google Patents
ブレーキ装置 Download PDFInfo
- Publication number
- JP6128317B2 JP6128317B2 JP2013122169A JP2013122169A JP6128317B2 JP 6128317 B2 JP6128317 B2 JP 6128317B2 JP 2013122169 A JP2013122169 A JP 2013122169A JP 2013122169 A JP2013122169 A JP 2013122169A JP 6128317 B2 JP6128317 B2 JP 6128317B2
- Authority
- JP
- Japan
- Prior art keywords
- brake
- hydraulic
- hydraulic pressure
- brake pedal
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Valves And Accessory Devices For Braking Systems (AREA)
- Braking Elements And Transmission Devices (AREA)
- Regulating Braking Force (AREA)
Description
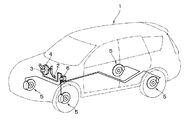
2 ブレーキペダル
3 マスタシリンダー
4 ブレーキブースタ
5 油圧ブレーキ
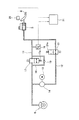
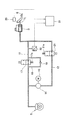
6 油圧コントロールユニット
11 サービスブレーキ系統
12 自動ブレーキ系統
13 電動モータ
14 油圧ポンプ
16 油圧センサー
17 カットバルブ
18 バイパス路
19 逆止弁
21 ソレノイドバルブ
25 ストロークセンサー
31 制御手段
Claims (1)
- 作動液の液圧によって車輪に制動力を付与する液圧ブレーキと、
ブレーキペダルの操作により前記液圧ブレーキの液圧を高めて前記液圧ブレーキをサービスブレーキとして作動させるサービスブレーキ系統と、
前記ブレーキペダルが操作されている際に、車両の傾きに基づいて前記サービスブレーキ系統の液圧を保持する保持弁と、
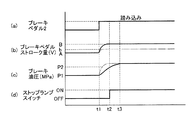
前記ブレーキペダルの操作量を検出する操作量検出手段と、
前記液圧ブレーキに作用する液圧の液圧値を検出する液圧検出手段と、
前記液圧検出手段で検出された液圧値と前記操作量検出手段で検出された操作量とに基づいて前記操作量検出手段の正常又は異常を判断する判断手段と、
前記保持弁により前記サービスブレーキの液圧が保持された後に、前記ブレーキペダルの操作をキャンセルし、所定時間内に再び前記ブレーキペダルを操作した場合に、前記判断手段による前記操作量検出手段の正常又は異常の判断を停止する停止手段とを備えた
ことを特徴とするブレーキ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013122169A JP6128317B2 (ja) | 2013-06-10 | 2013-06-10 | ブレーキ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013122169A JP6128317B2 (ja) | 2013-06-10 | 2013-06-10 | ブレーキ装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017004625A Division JP6268506B2 (ja) | 2017-01-13 | 2017-01-13 | ブレーキ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014237421A JP2014237421A (ja) | 2014-12-18 |
| JP6128317B2 true JP6128317B2 (ja) | 2017-05-17 |
Family
ID=52134991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013122169A Active JP6128317B2 (ja) | 2013-06-10 | 2013-06-10 | ブレーキ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6128317B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3299756B2 (ja) | 1993-01-18 | 2002-07-08 | セイコーインスツルメンツ株式会社 | 電子時計 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5413133A (en) * | 1977-06-29 | 1979-01-31 | Nissan Diesel Motor Co Ltd | Automatic parking brake device |
| JPS60206757A (ja) * | 1984-03-30 | 1985-10-18 | Keihin Seiki Mfg Co Ltd | 車両の制動装置 |
| JP2891166B2 (ja) * | 1996-04-05 | 1999-05-17 | 三菱自動車工業株式会社 | ブレーキアクチュエータ |
| JPH11310119A (ja) * | 1998-04-27 | 1999-11-09 | Toyota Motor Corp | 車両用ブレーキ装置 |
| JP3769969B2 (ja) * | 1999-03-09 | 2006-04-26 | トヨタ自動車株式会社 | 車輌の制動力制御装置の異常検出方法 |
| JP3714116B2 (ja) * | 1999-08-09 | 2005-11-09 | トヨタ自動車株式会社 | 操縦安定性制御装置 |
| JP2006123631A (ja) * | 2004-10-27 | 2006-05-18 | Hitachi Ltd | 車両の制御装置 |
| JP5013191B2 (ja) * | 2007-10-10 | 2012-08-29 | マツダ株式会社 | 車両の走行制御装置 |
| JP5471528B2 (ja) * | 2010-02-02 | 2014-04-16 | トヨタ自動車株式会社 | ブレーキシステム |
| US9216740B2 (en) * | 2010-06-15 | 2015-12-22 | Toyota Jidosha Kabushiki Kaisha | Driving support system |
| JP5360429B2 (ja) * | 2010-10-01 | 2013-12-04 | 三菱自動車工業株式会社 | 車両用制動制御装置 |
-
2013
- 2013-06-10 JP JP2013122169A patent/JP6128317B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3299756B2 (ja) | 1993-01-18 | 2002-07-08 | セイコーインスツルメンツ株式会社 | 電子時計 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014237421A (ja) | 2014-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4902373B2 (ja) | ブレーキ装置およびブレーキ装置の制御方法 | |
| JP5497742B2 (ja) | 車両用ブレーキ装置 | |
| JP5220827B2 (ja) | 車両用ブレーキ装置 | |
| KR101298138B1 (ko) | 차량용 제동 시스템 및 그 제어방법 | |
| US20120193975A1 (en) | Vehicle brake apparatus | |
| WO2010128652A1 (ja) | 車両用ブレーキ装置 | |
| WO2015072446A1 (ja) | 車両制御装置及び車両制御システム | |
| JP2007216946A (ja) | 制動制御装置 | |
| WO2014199419A1 (ja) | 車両用ブレーキ装置 | |
| CN107150672A (zh) | 车辆用控制装置 | |
| CN112313132A (zh) | 用于摩托车的驾驶辅助系统的控制装置及控制方法及用于摩托车的驾驶辅助系统 | |
| JP6727705B2 (ja) | 電動駐車ブレーキ装置 | |
| WO2012049747A1 (ja) | 車両用制動装置及び制御装置 | |
| US20210284116A1 (en) | Brake device | |
| JP2005343248A (ja) | 駐車補助ブレーキ制御装置 | |
| JP6128317B2 (ja) | ブレーキ装置 | |
| KR102813028B1 (ko) | 안장 탑승형 차량을 위한 브레이크 시스템 및 안장 탑승형 차량 | |
| JP2010089599A (ja) | 車両用ブレーキ装置 | |
| JP2008179191A (ja) | 車両用ブレーキ制御装置 | |
| CN112368189A (zh) | 控制摩托车的行动的控制装置及控制方法 | |
| KR20120136860A (ko) | 차량용 하이브리드 브레이크 | |
| JP5291807B2 (ja) | 車両用補助制動装置 | |
| JP6268506B2 (ja) | ブレーキ装置 | |
| JP2009184576A (ja) | ブレーキ装置 | |
| JP6354426B2 (ja) | 車両用ブレーキ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161116 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170328 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6128317 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |