JP5963600B2 - 除振装置 - Google Patents
除振装置 Download PDFInfo
- Publication number
- JP5963600B2 JP5963600B2 JP2012170384A JP2012170384A JP5963600B2 JP 5963600 B2 JP5963600 B2 JP 5963600B2 JP 2012170384 A JP2012170384 A JP 2012170384A JP 2012170384 A JP2012170384 A JP 2012170384A JP 5963600 B2 JP5963600 B2 JP 5963600B2
- Authority
- JP
- Japan
- Prior art keywords
- vibration isolation
- force
- vibration
- isolation table
- frequency band
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/02—Suppression of vibrations of non-rotating, e.g. reciprocating systems; Suppression of vibrations of rotating systems by use of members not moving with the rotating systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/002—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion characterised by the control method or circuitry
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/02—Suppression of vibrations of non-rotating, e.g. reciprocating systems; Suppression of vibrations of rotating systems by use of members not moving with the rotating systems
- F16F15/023—Suppression of vibrations of non-rotating, e.g. reciprocating systems; Suppression of vibrations of rotating systems by use of members not moving with the rotating systems using fluid means
- F16F15/027—Suppression of vibrations of non-rotating, e.g. reciprocating systems; Suppression of vibrations of rotating systems by use of members not moving with the rotating systems using fluid means comprising control arrangements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/02—Suppression of vibrations of non-rotating, e.g. reciprocating systems; Suppression of vibrations of rotating systems by use of members not moving with the rotating systems
- F16F15/03—Suppression of vibrations of non-rotating, e.g. reciprocating systems; Suppression of vibrations of rotating systems by use of members not moving with the rotating systems using magnetic or electromagnetic means
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70858—Environment aspects, e.g. pressure of beam-path gas, temperature
- G03F7/709—Vibration, e.g. vibration detection, compensation, suppression or isolation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D19/00—Control of mechanical oscillations, e.g. of amplitude, of frequency, of phase
- G05D19/02—Control of mechanical oscillations, e.g. of amplitude, of frequency, of phase characterised by the use of electric means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/02—Details
- H01J2237/0216—Means for avoiding or correcting vibration effects
Description
Claims (8)
- 除振台と、
前記除振台を支持する複数の支持機構と、
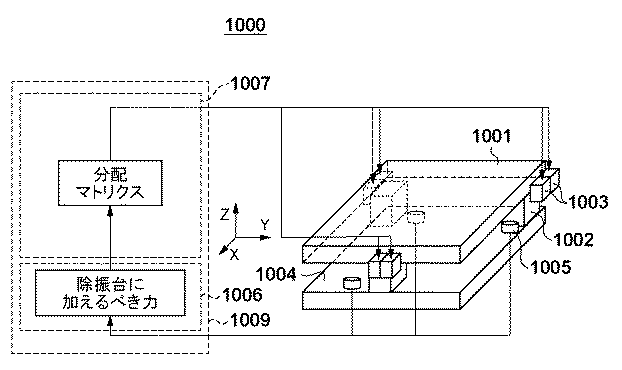
前記除振台に力を加える複数のアクチュエータと、
前記除振台における振動を表す振動データを取得する取得部と、
前記取得部で取得された前記振動データに基づいて、前記除振台における振動を低減させるために前記除振台に加えるべき力を算出する第1算出部と、
前記第1算出部で算出された力を、前記複数のアクチュエータのそれぞれが前記除振台に加える力に分配する分配部と、を有し、
前記分配部は、
前記第1算出部で算出された前記力を、第1周波数帯域の力成分のみを含む第1力と、前記第1周波数帯域よりも低い第2周波数帯域の力成分のみを含む第2力とに分離する分離部と、
前記第1算出部で算出された力を前記複数のアクチュエータのそれぞれに分配するための分配比率を周波数帯域ごとに有し、前記分配比率のうち第1分配比率を前記第1力に乗算した結果と、前記第1分配比率とは異なる第2分配比率を前記第2力に乗算した結果とを足し合わせることで前記複数のアクチュエータのそれぞれが前記除振台に加える力を算出する第2算出部と、
を含むことを特徴とする除振装置。 - 前記第1分配比率は、前記複数のアクチュエータの配置と、前記除振台の重心位置と、前記複数のアクチュエータのそれぞれが前記除振台に加える力の方向との関係に基づいて決定され、
前記第2分配比率は、前記複数のアクチュエータの配置と、前記複数の支持機構の配置及び剛性と、前記複数のアクチュエータのそれぞれが前記除振台に加える力の方向との関係に基づいて決定されることを特徴とする請求項1に記載の除振装置。 - 前記取得部は、前記除振台における振動を検出することで前記振動データを取得する第1検出部、及び、前記除振台が設置される設置台の振動を検出することで前記振動データを取得する第2検出部の少なくとも一方を含むことを特徴とする請求項1又は2に記載の除振装置。
- 前記第1周波数帯域は、前記複数の支持機構の固有振動数よりも高い周波数を含む周波数帯域であり、
前記第2周波数帯域は、前記複数の支持機構の固有振動数よりも低い周波数を含む周波数帯域であることを特徴とする請求項1乃至3のうちいずれか1項に記載の除振装置。 - 前記分配部は、前記第1算出部と前記分離部との間に、前記固有振動数における力成分を低減するフィルタを含むことを特徴とする請求項4に記載の除振装置。
- 前記第1分配比率及び前記第2分配比率は、前記複数のアクチュエータのうち1つのアクチュエータによって前記除振台に一方向の力を加えたときに前記取得部で取得される前記振動データに基づいて決定されることを特徴とする請求項1に記載の除振装置。
- 前記第1分配比率は、前記1つのアクチュエータによって前記除振台に前記複数の支持機構の固有振動数以上の周波数の力を加えたときに前記取得部で取得される前記振動データに基づいて決定されることを特徴とする請求項6に記載の除振装置。
- 前記第2分配比率は、前記1つのアクチュエータによって前記除振台に前記複数の支持機構の固有振動数よりも低い周波数の力を加えたときに前記取得部で取得される前記振動データに基づいて決定されることを特徴とする請求項6に記載の除振装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012170384A JP5963600B2 (ja) | 2011-08-09 | 2012-07-31 | 除振装置 |
| US13/569,220 US8915479B2 (en) | 2011-08-09 | 2012-08-08 | Anti-vibration apparatus |
| KR1020120086697A KR20130018610A (ko) | 2011-08-09 | 2012-08-08 | 제진 장치 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011174257 | 2011-08-09 | ||
| JP2011174257 | 2011-08-09 | ||
| JP2012170384A JP5963600B2 (ja) | 2011-08-09 | 2012-07-31 | 除振装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013053746A JP2013053746A (ja) | 2013-03-21 |
| JP5963600B2 true JP5963600B2 (ja) | 2016-08-03 |
Family
ID=47676931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012170384A Expired - Fee Related JP5963600B2 (ja) | 2011-08-09 | 2012-07-31 | 除振装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8915479B2 (ja) |
| JP (1) | JP5963600B2 (ja) |
| KR (1) | KR20130018610A (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110095945A (zh) * | 2012-07-09 | 2019-08-06 | 株式会社尼康 | 驱动系统和驱动方法、以及曝光装置和曝光方法 |
| KR101689237B1 (ko) * | 2012-11-06 | 2016-12-23 | 에이에스엠엘 네델란즈 비.브이. | 리소그래피 장치 및 디바이스 제조 방법 |
| CN104395866B (zh) * | 2012-11-30 | 2018-02-23 | 松下知识产权经营株式会社 | 触觉提示装置及触觉提示方法 |
| JP6278676B2 (ja) * | 2013-11-29 | 2018-02-14 | キヤノン株式会社 | 振動低減装置、リソグラフィ装置、および物品の製造方法 |
| JP6307101B2 (ja) * | 2016-02-19 | 2018-04-04 | キヤノン株式会社 | リソグラフィ装置、および物品の製造方法 |
| NL2016330B1 (en) | 2016-02-26 | 2017-09-20 | Mecal Intellectual Property And Standards B V | Active inertial damper system and method |
| JP6864447B2 (ja) * | 2016-09-06 | 2021-04-28 | キヤノン株式会社 | リソグラフィ装置、および物品の製造方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3471370B2 (ja) * | 1991-07-05 | 2003-12-02 | 本田技研工業株式会社 | 能動振動制御装置 |
| US5285995A (en) * | 1992-05-14 | 1994-02-15 | Aura Systems, Inc. | Optical table active leveling and vibration cancellation system |
| JP3507234B2 (ja) | 1996-01-11 | 2004-03-15 | キヤノン株式会社 | 能動除振装置および能動除振方法 |
| JP3286186B2 (ja) | 1996-10-09 | 2002-05-27 | キヤノン株式会社 | 微動位置決め制御装置 |
| JPH10169701A (ja) | 1996-12-06 | 1998-06-26 | Canon Inc | 能動的除振装置 |
| JP3825869B2 (ja) * | 1997-03-19 | 2006-09-27 | キヤノン株式会社 | 能動除振装置 |
| JPH11193847A (ja) * | 1998-01-05 | 1999-07-21 | Canon Inc | 除振制御方法および装置 |
| JP2001050334A (ja) * | 1999-08-05 | 2001-02-23 | Fujita Corp | アクティブ型除振装置 |
| US6752250B2 (en) * | 2001-09-27 | 2004-06-22 | Northrop Grumman Corporation | Shock, vibration and acoustic isolation system |
| JP2003130128A (ja) | 2001-10-30 | 2003-05-08 | Canon Inc | 能動除振装置 |
| JP3902942B2 (ja) * | 2001-11-13 | 2007-04-11 | キヤノン株式会社 | 除振装置及びその制御方法、並びに該除振装置を有する露光装置 |
| EP2447777B1 (en) * | 2010-10-27 | 2019-08-07 | ASML Netherlands BV | Lithographic apparatus for transferring pattern from patterning device onto substrate, and damping method |
| JP5789153B2 (ja) * | 2011-08-15 | 2015-10-07 | キヤノン株式会社 | 露光装置及びデバイス製造方法 |
-
2012
- 2012-07-31 JP JP2012170384A patent/JP5963600B2/ja not_active Expired - Fee Related
- 2012-08-08 KR KR1020120086697A patent/KR20130018610A/ko active IP Right Grant
- 2012-08-08 US US13/569,220 patent/US8915479B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR20130018610A (ko) | 2013-02-25 |
| US20130037687A1 (en) | 2013-02-14 |
| US8915479B2 (en) | 2014-12-23 |
| JP2013053746A (ja) | 2013-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5963600B2 (ja) | 除振装置 | |
| JP5107575B2 (ja) | 慣性基準質量を有する能動型防振用アクチュエータ構成 | |
| JP3073879B2 (ja) | 除振装置 | |
| JP2007522393A (ja) | 慣性基準質量としてペイロードを使用するアクティブ振動絶縁のためのアクチュエータ配置 | |
| JP2012529607A (ja) | 能動的防振および制振システム | |
| JP5524649B2 (ja) | 振動分離のためのフィードバック制御システムで使用するためのコンビネーション形運動センサ | |
| CN106556460B (zh) | 主动去振装置及该主动去振装置的振动传感器的设置方法 | |
| EP2278188A1 (en) | Vibration control device and vehicle | |
| JP6556196B2 (ja) | アクティブ除振装置 | |
| JP4970904B2 (ja) | アクティブ除振装置 | |
| NL2016330B1 (en) | Active inertial damper system and method | |
| US7822509B2 (en) | Control system for active vibration isolation of a supported payload | |
| JP2007188251A (ja) | ステージ装置 | |
| JP2012037039A (ja) | 制振合金を用いた除振装置 | |
| JP6401598B2 (ja) | アクティブ除振装置 | |
| JP7023121B2 (ja) | アクティブ除振装置 | |
| JP2000120766A (ja) | ハイブリッド式能動振動絶縁装置 | |
| CN100465473C (zh) | 包括惯性基准质量的用于主动隔振的致动器装置 | |
| JP2005057876A (ja) | ステージ装置用の反力処理システム | |
| JP4457297B2 (ja) | 多自由度制御装置の逆変換方法 | |
| Kim et al. | Estimation of body links transfer functions in vehicle vibration environment | |
| JP5276548B2 (ja) | アクティブ防振方法及びこれに用いる防振装置 | |
| JPH07310779A (ja) | アクティブ除振装置 | |
| Zhao et al. | A pair of piezo-based rotating inertial actuators for active structural acoustic control of rotating machinery | |
| JPH05340443A (ja) | 慣性力相殺による振動制御法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150730 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160524 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160628 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5963600 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |